



![Corso di Psicologia Clinica - Università di Roma LUMSACli_2015] lezio… · Il metodo storico-clinico Il metodo storico-clinico o storico-motivazionale considera il coinvolgimento](https://static.fdocument.org/doc/165x107/5f99d49dbaa6c8249962fc05/corso-di-psicologia-clinica-universit-di-roma-lumsa-cli2015-lezio-il-metodo.jpg)

γλώσσες
Σελίδες
Νομικός


P2
P2
P2
P2P2
P2
P3
P3
P3
P3
P3
P3
P4P4
P4
P4
P4
P4
P5
P5
P5
P5
P5
P5
P1
MÉTODODABEJAMÉTODODABEJA
P2
P2
P2
P2P2
P2
P3
P3
P3
P3
P3
P3
P4P4
P4
P4
P4
P4
P5
P5
P5
P5
P5
P5
P1
Daniel Bejarano Segura
Editado por Editorial ABCDario para la Gobernación del Meta
θ =15º, 30º, 55º, 80º, 100º y 120ºcon P = (0,0) con L = 8 cm.1


P1
P2
P3
P4
P6
P7
P9
P5
P1
P2
P3
P4
P6
P7
P9
P5
1144
++33
xxMÉTODO DABEJA
MÉTODO DABEJA
MAT
EMÁT
ICAS

ISBN: 978-958-44-2589-8
Autor: Daniel Bejarano Segura DABEJA Primera edición, 2007
Editado y Realizado porCASA EDITORIAL ABCDarioGerenteAlejandro Pineda ArroyaveEditor GeneralSergio David Acevedo ValenciaDiseño y diagramaciónCASA EDITORIAL ABCDarioCorrección de estiloJorge Hernán Arbeláez UribeCarrera 23 No. 73-39 Tel. (57) (6) 8867788Manizales, Caldas, Colombiaemail: [email protected]ón
Noviembre de 2007Todos los derechos reservados ®

AGRADECIMIENTOS
Agradecerle a Dios por la sabiduría y conocimiento que me ha dado; a mi esposa amada Darkis Nelle Pérez Silva, mis hijos, Juan David y Dairon Andrés, a mi madre Sol Marina Segura y padre (q.e.p.d.) hermanos y familiares que siempre han creído en mi trabajo. A la tierra del Vaupés que me acogió durante seis años, con buenos amigos, al doctor Hidelbrando Albarracín, Secretario de Educación del Meta, quien ha apoyado incondicionalmente este trabajo; y demás personas que de una u otra forma han estado siempre conmigo durante todo este tiempo. Gracias.


MÉTODO DABEJA
BIOGRAFÍA
Daniel Bejarano Segura, nació el 15 de septiembre
de 1976 en la ciudad de Arauca, en el departamento
de Arauca. Bautizado en el Municipio de San Juan
de Arama en el Departamento del Meta. Ingresa a la
Universidad de los Llanos Orientales a la
Licenciatura en Matemáticas y Física, donde se
destacó por sus buenas calificaciones que le
otorgaron Matrícula de Honor, razón por la cual fue
eximido de los derechos de grado, en el año 2000. Viaja a la ciudad de
Mitú en el departamento del Vaupés, donde es nombrado en propiedad,
en la Escuela Normal Superior Indígena María Reina "ENOSIMAR"
Allí realiza trabajos de investigación desde las ciencias naturales
"Física" "FENÓMENOS Y CREENCIAS NATIVAS 2002-2005"
"CONCEPCIONES ÉTNICAS Y CIENTÍFICOS NATURALES 2004-
2005" y la Etnomatemática "PENSANDO MATEMÁTICAMENTE
DESDE NUESTRA CULTURA 2002-2006" reconocidos por el
Ministerio de Educación Nacional quien los hizo partícipes del Foro
Educativo Nacional en el 2003 por sus diversas experiencias
significativas en el aula. Co-Autor del Libro "DIVERSIDAD
CULTURAL EN LA FORMACIÓN DE MAESTROS, Universidad
Pedagógica Nacional, Bogotá, 2006 ediciones Géminis Ltda."
Capacitador de propuestas pedagógicas para la enseñanza-aprendizaje
de las matemáticas "PENSAMIENTOS Y ESTRATEGIAS EN EL
ÁREA DE LAS MATEMÁTICAS" desde 2003 hasta el 2006.
Reconocido por el departamento del Vaupés por sus innovaciones

pedagógicas y administrativas, ese mismo año empieza a investigar
sobre lo que hoy se denomina el Método DABEJA; en junio del 2006 es
trasladado de la ciudad de Mitú al Municipio de Vista Hermosa en la
vereda de Piñalito en el Departamento del Meta, antigua Zona de
Distensión, y actualmente, labora en la Institución Educativa IRACÁ
En IRACÁ ha formado un semillero de investigación con estudiantes
de grado décimo. Es invitado al primer foro educativo municipal en Chía
(Cundinamarca), luego representa al Departamento del Meta en el Foro
Educativo Nacional con el Método DABEJA, su investigación ha sido
reconocida por las principales universidades del país, quienes lo han
invitado a sus eventos en matemáticas como conferencista "XVIII
ENCUENTRO DE GEOMETRÍA Y SUS APLICACIONES Y VI
ENCUENTRO DE ARITMÉTICA BOGOTÁ," "8º ENCUENTRO DE
MATEMÁTICA EDUCATIVA, SANTIAGO DE CALI", XVI
CONGRESO NACIONAL DE MATEMÁTICAS MEDELLÍN", entre
otros.

PRESENTACIÓN
El pensamiento espacial componente fundamental del currículo del
área de las matemáticas desarrolla procesos de espacialidad que desde
temprano permiten al educando ubicarse en un sistema de
posicionamiento tridimensional, encaminado a su estudio en diferentes
dimensiones las cuales surgen a partir de la descomposición de cada una
de ellas y que permiten desarrollar un esquema coherente en su
cotidianidad.
La investigación matemática sobre la construcción de los polígonos
regulares y las figuras planas constituyen la base del "método DABEJA",
el cual contiene diversas fórmulas matemáticas que logran que las
habilidades motoras y el esquema sensoro-motriz del educando desde
temprana edad sean accesibles para el docente de básica primaria y
secundaria, empleando herramientas cotidianas en el desarrollo del
pensamiento espacial,
El docente que practica el método DABEJA aplica los conocimientos
básicos del álgebra y trigonometría e implementa otros que son de poco
manejo cotidiano en la preparación de clase, emplea las herramientas de
graficación para verificar la exactitud del mismo y confronta las
aplicaciones geométricas de los polígonos regulares y las figuras planas,
controlando las variables que generan los puntos coordenados y
ordenados en la construcción. Visualiza otras propiedades geométricas
cada vez que construye las diferentes figuras; éstas a su vez están
relacionadas con la trigonometría y el álgebra desde su parametrización
y demostraciones que existen para cada una de las figuras que se
construyen sin emplear el compás.


INTRODUCCIÓN
La geometría plana, que estudia las propiedades de superficies y
figuras planas ha estado ligada desde sus inicios al compás como
herramienta de graficación, los problemas de construcción, en los que
cierta línea o figura debe ser construida utilizando sólo una regla de
borde recto y un compás, hacen parte en la enseñanza y aprendizaje de la
geometría en los centros educativos desde hace tiempo, en especial, en
los que no cuentan con computadores y otras tecnologías que faciliten
este tipo de construcciones.
El método DABEJA permite construir los polígonos regulares y las
figuras planas sin emplear el compás, sólo a través de los puntos
coordenados y ordenados en el plano cartesiano, los cuales poseen una
parametrización algebraica de las abscisas y ordenadas para cada figura
controlando las variables que entran en juego en la representación como
el valor del lado, el del ángulo de rotación respecto de la horizontal y el
ángulo externo encontrando reglas generales para la demostración
matemática tipo geométrico y algebraico los cuales involucran
conceptos trigonométricos básicos.
En el transcurso del libro se encontrarán diversos capítulos que
permiten al lector desglosar las figuras geométricas bidimensionales
como los polígonos regulares en el primero, que generalizan dos
fórmulas a nivel general que encuentran las abscisas y las ordenadas
consecutivamente de los puntos o vértices de cada polígono regular
incentivando a la proyección de infinitos lados. Los diversos tipos de
triángulos cada uno con su característica se ven en el capítulo dos,
presentando el movimiento de un lado con respecto a otro, siendo éste
mayor que el anterior, como un límite para entender las posibilidades que
tiene un docente al querer construir un triángulo según sus ángulos.

Los cuadriláteros continúan en el capítulo tres, identificando las
diversas relaciones del cuadrado, rombo, romboide y rectángulo. Como
ejemplo, todo cuadrado es un rectángulo pero no todo rectángulo es
cuadrado; además los trapecios y trapezoides que ya han perdido su valor
en cuanto a su enseñanza en la educación básica, y nuevamente, son
caracterizados según sus partes internas y externas complementando su
estudio. Otras figuras bidimensionales como las estrellas de n-puntas, el
teorema de Pitágoras y el tangram, construidas a través del método
DABEJA permiten encontrar las relaciones del movimiento que posee
cada punto (vértice) respecto a sus ángulos y lados, estas relaciones se
observan a simple inspección al determinar cada punto coordenado.
Las transformaciones geométricas cuyas aplicaciones como las
traslaciones, rotaciones o giros y homotecias hacen parte del capítulo
cinco, reconociendo en ellas interacciones de los puntos coordenados y
sus propiedades que los identifican sin tener en cuenta el tipo de figura
que se desee mover. Se culmina con las construcciones de los cuerpos
geométricos graficados desde el plano, recortadas y pegadas tipo
plegados en dos dimensiones, las cuales desarrollan desde temprana
edad la motricidad y la visualización espacial de estas construcciones
que desarrolladas con valores reales, alcanzan tamaños jamás
imaginados por los docentes de manera fácil y divertida para los
estudiantes.
El método DABEJA continúa encontrando otros aspectos
geométricos de las figuras, siendo éstos motivos de futuras
investigaciones por parte de docentes y estudiantes con grandes
aptitudes de investigación, permitiendo así un mayor desarrollo en las
matemáticas y la labor docente en el aula.

CAPÍTULO 1
FIGURAS GEOMÉTRICAS I
P6
P3
P1
P9
P7
P5
P4
P2
P8

1.1 POLÍGONOS REGULARES:
1.1.1 Conceptos
Figura plana cerrada constituida por n puntos (vértices) de los que en ningún caso pueden encontrarse alineados tres consecutivos (formando línea de 180º) y por n segmentos rectilíneos que unen entre sí a los vértices. (Diccionario enciclopédico Color. 2001)
Todo polígono regular de n-lados tiene n-puntos coordenados y ordenados, P (X , Y ) P (X , Y ), P (X , Y ), P (X , Y ), P (X5, Y5), P1 n-
(X , Y ). P (X , Y ), P (X , Y ). Los cuales surgen por:2 n-2 n-2 n-1 n-1 n-1 n n n
1 1 2 2 2 3 3 3 4 4 4 5
X = LCos (q + k w) + Xn n-1
Y = LSen (q + k w) + Yn n-1
+Con LЄ R , 0 θ 360º respecto a la horizontal K=n-2, n= puntos coordenados ω= (360/i), i, al número de lados. Donde L es el valor del lado que usted asigna y es cualquier número real, θ es el ángulo de rotación respecto de la horizontal, “asignado por usted” ω es el ángulo suplementario o externo y depende del número de lados del polígono, X y Y “abscisas y ordenadas” puntos coordenados que generan los polígonos, X y Y punto anterior respecto de X y Y . (Método DABEJA 2006)
1.1.2 Fórmulas método DABEJA para polígonos regulares y generalización.
Estas fórmulas contienen variables conocidas en cursos de trigonometría, como las funciones seno y coseno, ángulos de rotación “θ”, suplementarios “ω” e internos “ ω´ ” puntos coordenados P = (x , y ) cuyas componentes tiene valores reales positivos localizados n n n
en el plano cartesiano, el valor del lado del polígono regular “L”. Interactuando entre ellas para encontrar los puntos coordenados y ordenados que construyen la figura según sus lados.
≤ ≤igual
n
n
n-1 n-1 n n
Figuras Geométricas IFiguras Geométricas I
1212

FÓRMULAS PARA POLÍGONOS REGULARES DE N-LADOS
Para las componentes en el eje horizontal X (abscisas),
X = LCos θ + X X = LCos θ + X2 2-1 2 1
X = LCos (θ + ω) + X X = LCos (θ + ω) + X3 3-1 3 2
X = LCos (θ + 2ω)+ X X = LCos (θ + 2ω) + X4 4-1 4 3
X = LCos (θ + 3ω) + X X = LCos (θ + 3ω) + X5 5-1 5 4
.
.
.
X = LCos (θ + k ω) + Xn n-1
De igual forma para las componentes en y (ordenadas),
Y = LSen θ + Y Y2 = LSen θ + Y2 2-1 1
Y = LSen (θ + ω) + Y Y = LSen (θ+ ω) + Y3 3-1 3 2
Y = LSen (θ + 2ω) + Y Y = LSen (θ+ 2ω) + Y4 4-1 4 3
Y = LSen (θ + 3ω) + Y Y = LSen (θ+ 3ω) + Y5 5-1 5 4
.
.
.
Yn = LSen (θ+ k ω) + Yn-1
1.1.3 Demostración y construcciones
Se realizará la demostración y construcción del pentágono regular
teniendo en cuenta los siguientes procesos apoyados en conceptos y
relaciones trigonométricas, segmentos, ángulos y puntos coordenados.
Figuras Geométricas IFiguras Geométricas I
1313

X X = - Y = - 2 1 1X X Y Y Y2 1 2 1 2
X X = A Y = 2 1 COSq Y ASENq 2 1
X - X = A Y = 2 1 COSq - Y ASENq 2 1
X = A + X = 2 COSq Y ASENq + Y 1 1 1
X X = Y = 2 1 COSq Y SENq2 1
X X = Y = 2 1 COSq Y SENq2 1
A A
X X = - Y = - 3 2 2X X Y Y Y3 2 3 2 3
X - X = A Y = 3 2 COS(q + w) - Y ASEN(q + w) 3 2
X = A + X = 3 COS(q + w) Y ASEN(q + w) + Y 2 3 2
X X = Y = 3 2 COS(q + w) Y SEN(q + w)3 2
A A
X X = - Y = - 3 4 3X X Y Y Y4 3 3 4 4
X - X = A Y = 4 3 COS(q + 2w) - Y ASEN(q + 2w) 4 3
X = A + X = 4 COS(q + 2w) Y ASEN(q + 2w) + Y 3 4 3
X X = Y = 3 4 COS(q + w + w) Y SEN(q + w+ w)3 4
A A
X X = - Y = - 4 5 4X X Y Y Y5 4 4 5 5
X - X = A Y = 5 4 COS(q + 3w) - Y ASEN(q + 3w) 5 4
X = A + X = 5 COS(q + 3w) Y ASEN(q + 3w) + Y 4 5 4
X X COS(q + w + w + w) Y SEN(q + w+ w + w)4 5 4 5 = Y =
A A
P2
P1 = (x , y )1 1x2
y2
y2
y3
P2
P1
A
A
q
q
w
P3
P2
P4
P 1
qw
w
q
w’
A
A
A
x3
y3
y4
x4
P4
P5
P2
y4
y5
x5 x4
A
AA
A
ww
w
q
q
Figuras Geométricas IFiguras Geométricas I
1414

X X = - Y = - 5 1 5X X Y Y Y1 5 5 1 1
Y Y = Y = 5 1 SEN(q + 4w) - Y ASEN(q + 4w) 1 5
X = A + X = 1 COS(q + 4w) Y ASEN(q + 4w) + Y 5 1 5
X X COS(q + w + w + w + w)5 1 =
A
A
P5 y5
x5 P1 = (x , y )1 1
A
A
ww
w w
q
A
A
A
En la construcción del pentágono regular se demuestra cómo los
puntos coordenados y ordenados conservan el movimiento rotacional
con ángulos de rotación “θ” y suplementarios “ω” cada vez que se
encuentran sus coordenadas cartesianas ordenadamente. En la parte final
de la demostración se comprueba que el punto final del pentágono
regular es el mismo punto inicial, generando de manera cíclica los puntos
coordenados posteriores limitándolo a encontrar tan solo cinco puntos
coordenados y ordenados para construirlo. De manera similar se
demuestran y construyen cada uno de los polígonos regulares de
cualquier número de lados. Invitamos al lector a demostrar y construir el
polígono regular que desee, apoyado en la fórmula general para
polígonos de n-lados
1.1.3 Construcción de polígonos regulares
Para construir un polígono regular de n-lados se deben tener en cuenta:
· Los conceptos y variables mencionadas en apartados anteriores.
· El polígono es construido según los datos que usted plantee para
las variables dadas.
· Manejar adecuadamente el plano cartesiano, la ubicación de
puntos coordenados con valores reales positivos y su
aproximación a decimales de una o varias cifras.
· Según el número de lados del polígono a construir, así será el
número de puntos a localizar.
Figuras Geométricas IFiguras Geométricas I
1515

· El ángulo suplementario para un polígono regular está dado por
ω = (360/i), donde i, al número de lados.
· Cada punto se une con el siguiente a través de un segmento de
recta llamado lado del polígono.
· La rotación de la figura es respecto de la horizontal y toma
valores de grados desde cero a trescientos sesenta, incluyendo
minutos y segundos si lo desea.
· Después de encontrar todos los puntos del polígono, si usted,
aumenta en uno el número de puntos se dará cuenta que es el
punto inicial del mismo.
· Se recomienda emplear papel milimetrado.
Cabe recordar que los datos asignados son los que usted desee, dando
el P1 punto inicial (x, y), el valor del lado del polígono regular L= a cm. +Con a Є R , K= n-2, n= puntos coordenados, el ángulo de rotación de la
figura 0 θ 360º y el ángulo externo del polígono regular ω = (360/i),
i, al número de lados.
Si se desea construir un pentágono regular con:
P1 = (0, 0) L = 5 cm θ = 0º ω = (360º/5) = 72º
Los puntos coordenados y ordenados restantes que debo encontrar son:
P (X , Y ) P (X Y ) P (X , Y ) P (X , Y )2
Con coordenadas
igual
≤ ≤
igual
, , , ,2 2 3 3 3 4 4 4 5 5 5
“K = n-2 = 2 -2 = 0”P2= (5, 0)
“K= n-2 = 3-2 = 1”
P = (6.54, 4.75),3
“K= n-2=4 - 2 =2”
P = (2.5, 7.69)4
K = 3P5 = (-1.54, 4.75)
Y = Lsen (θ + K ω) + YY =5Sen(0) + 0 = 02
Y = Lsen (θ + K ω) + Y3 2
Y =5Sen (0+ 72) + 0 = 4.753
Y = Lsen (θ + 2ω) + Y4 3
Y =5Sen (144) +4.75=7.694
Y = Lsen (θ + 3ω) + Y5 4
Y = 5Sen (216) + 7.69 = 4.755
2 1X = Lcos (θ + K ω) + X2
X = 5Cos (0) + 0 = 52
X = Lcos (θ + K ω) + X23
X = 5Cos (0+ 72) + 5 =6.543
X = Lcos (θ + 2ω) + X4 3
X = 5Cos (144) + 6.54=2.54
X = Lcos (θ + 3ω) + X5 4
X = 5Cos (216) + 2.5= -1.545
1
Figuras Geométricas IFiguras Geométricas I
1616

Los cuales se representan en el plano cartesiano
Pentágono regular
P1 P2
P3P5
P4
Ahora se construirá un heptágono regular con:
P = (-2,-3) L = 3.5 cm θ = 230º ω = (360º/7)1
Los puntos coordenados y ordenados restantes que se deben encontrar son:
P (X , Y ), P (X , Y ), P (X , Y ), P (X , Y ), P (X , Y ), P (X , Y )2 2 2 3 2 2 4 4 4 5 5 5 5 6 6 7 7 7
Con coordenadas
K = 0P = (-4.24, -5.68)2
K = 1P = (-3.55, -9.11),3
K = 2P = (-0.44, -10.70)4
K = 3P = (2.74, -9.26)5
K = 4P = (3.61, -5.87)6
K = 5P = (1.49, -3.08)7
Y = Lsen (θ + K ω) + YY = 3.5Sen (230) -3 = -5.682
Y = Lsen (θ + K ω) + Y3 2
Y = 3.5Sen (230 + 360/7) - 5.68 = -9.113
Y = Lsen (θ + 2ω) + Y4 3
Y = 5Sen (230 + 720/7) -9.11 = -10.74
Y = Lsen (θ + 3ω) + Y5 4
Y = 5Sen (230 + 1080/7) -10.7 = -9.265
Y = Lsen (θ + 4ω) + Y6 5
Y = 5Sen (230 + 1440/7) -9.26 = -5.876
Y = Lsen (θ + 5ω) + Y7 6
Y = 5Sen (230 + 1800/7) -5.87 = -3.087
2 1X = Lcos (θ + K ω) + X2
X = 3.5Cos (230) - 2 = -4.242
X = Lcos (θ + K ω) + X3 2
X = 3.5Cos (230 + 360/7) -4.24 = -3.553
X = Lcos (θ + 2ω) + X4 3
X = 5Cos (230 + 720/7) -3.55 = -0.444
X = Lcos (θ + 3ω) + X5 4
X = 5Cos (230 + 1080/7) -0.44 = 2.745
X = Lcos (θ + 4ω) + X6 5
X = 5Cos (230 + 1440/7) + 2.74 = 3.616
X = Lcos (θ + 5ω) + X7 6
X = 5Cos (230 + 1800/7) + 3.61 = 1.497
1
Figuras Geométricas IFiguras Geométricas I
1717

Las figuras (a), (b) y (c) muestran el proceso de construcción del
heptágono regular a través de puntos coordenados y ordenados.
P1
P2
P3
P1
P2
P3
P4
P5
Figura (b)
P1 P7
P6P2
P3
P4
P5
Figura ( c )
Figura (a)
Figuras Geométricas IFiguras Geométricas I
1818

CAPÍTULO 2
FIGURAS GEOMÉTRICAS II

2.1 TRIÁNGULOS
2.1.1. Conceptos y clasificación
Triángulo (figura), polígono de tres lados. Según la longitud de sus lados, los triángulos se clasifican en equiláteros, si sus tres lados son iguales; isósceles, si tienen dos lados iguales; y escalenos, si los tres lados son distintos. La suma de los tres ángulos de un triángulo es 180º. Dos de los ángulos son, necesariamente, agudos. El tercero puede ser también agudo, o bien recto u obtuso. Si los tres ángulos son agudos el triángulo se llama acutángulo, si tiene un ángulo recto, rectángulo y obtusángulo si el mayor de sus ángulos es obtuso.
Los triángulos se clasifican según sus lados y ángulos, el método Dabeja presenta para cada uno de ellos las fórmulas de los puntos coordenados y ordenados diferenciándolos en sus datos iniciales especialmente en sus ángulos y lados limitándolos al dar valores en el ángulo suplementario ω = 120º y sus tres lados iguales para el triángulo
equilátero. Si el ángulo suplementario ω 120º con L y L iguales en el 1 2
caso del triángulo isósceles. Si el ángulo suplementario 0<ω<180º y los
lados a b para el triángulo escaleno. Si ω = 90º para el triángulo
rectángulo, sus dos lados iniciales pueden ser iguales, menores o mayores
entre sí. Cuando 90º<ω< Cos [-L /L ] si L < L y cuando el ángulo 1 2 1 2
suplementario 90º < ω<180º si L L en los triángulos acutángulos. 1 2
Cuando el ángulo suplementario ω < 90º si L L y para 1 2
-1Cos [-L /L ]<ω< 180º si L < L para los triángulos obtusángulos. Siendo 1 2 1 2
éstos los datos de los ángulos y lados que se deben tener en cuenta para cuando usted desee construir cualquier tipo de triángulo con el método Dabeja.
2.1.2 Fórmulas método DABEJA para cualquier tipo de
triangulo
Triángulo EquiláteroAquel polígono regular de 3-lados. Que tiene 3-puntos coordenados y ordenados, P (X , Y ), P (X , Y ), P (X , Y ) basados en las fórmulas del 1 1 1 2 2 2 3 3 3
método Dabeja, las cuales encuentran los puntos restantes.
≠
≠
≥
≥
-1
Figuras Geométricas IIFiguras Geométricas II
2020

Clasificado como el polígono regular de tres lados, por ello se emplea la fórmula de los polígonos regulares de i-lados, siendo i = 3, K= n-2,
n, puntos coordenados, el ángulo suplementario ω = (360/i), i = 3, +
ω = 120º, el ángulo de rotación 0 θ 360º L = a cm. con a Є R . P (X ,
Y ) el punto inicial del triángulo. Cada valor dado por usted a las 1
variables encuentran los dos puntos restantes
X = LCos (θ + k ω) + X Y = LSen (θ + k ω) + Yn n-1 n n-1
≤ ≤ 1 1
· X = LCos θ + X2-1 Y = LSen θ + Y 2 2 2-1
· X = LCos θ + X Y = LSen θ + Y P (X , Y ), 2 1 2 1 2 2 2
· X = LCos (θ + ω) + X Y = LSen (θ + ω) + Y3 3-1 3 3-1
· X = LCos (θ + ω) + X Y = LSen (θ + ω) + Y P (X , Y )3 2 3 2 3 3 3
P1 P2
P3
Triángulo Equilátero
Con θ = 0º ω = 120º L = 5 cm. P = (0,0)1
Triángulo Isósceles
Es aquel cuyo ángulo suplementario 0 < ω < 180º y ω 120º con
L y L iguales, constituidos por tres puntos coordenados y ordenados 1 2
P (X , Y ) (inicial), P (X , Y ), P (X , Y )1
· X = LCos θ + X Y = LSen θ + Y P (X , Y ),
· X = LCos (θ + ω) + X Y = LSen (θ + ω) + Y P (X , Y )3 2 3 2 3 3 3
≠
1 1 2 2 2 3 3 3
2 1 2 1 2 2 2
Figuras Geométricas IIFiguras Geométricas II
2121

El comportamiento del triángulo isósceles es semejante al triángulo
equilátero su diferencia radica en el ángulo suplementario diferente a
120º tomando valores mayores a cero y menores a ciento ochenta grados.
Generando dos ángulos internos iguales.
P3
P2
P1
P3
P2
P1
Triángulo Isósceles (a)
Triángulo Isósceles (b)
Con θ = 60º ω=80º L = 5 cm. P1 = (0,0) 1y2
Con θ = 30º ω = 145º L = 6.5cm. P1 = (0, 0) 1y2
Triángulo Escaleno
Triángulo cuyos lados no tienen igual medida , siendo su
ángulo suplementario 0 < ω < 180º y sus internos diferentes entre sí. Los
tres puntos coordenados y ordenados que lo conforman son P (X , Y ) 1
(punto inicial del triángulo), P (X , Y ), P (X , Y ) restantes con 2 2 2 3 3 3
formulas.
· X = L Cos θ + X1 Y = L Sen θ + Y P (X , Y ), 2 1 2 1 1 2 2 2
· X = L Cos (θ+ ω) + X Y = L Sen (θ + ω) + Y P (X , Y )3 2 2 3 2 2 3 3 3
L L L1 2 3≠ ≠
1 1
Figuras Geométricas IIFiguras Geométricas II
2222

El triángulo escaleno presenta la condición para sus lados L y L , siendo 1 2
estos diferentes entre sí y los valores para el ángulo suplementario mayor
que cero y menor que ciento ochenta grados definen ángulos internos
P3
P2P1
Triángulo Escaleno
Con θ = 0º ω = 165º L = 7 cm. L = 9 cm. P = (0,0)1 2 1
Triángulo Rectángulo
Triángulo cuyos ángulos interno y suplementario son iguales ω’=ω= 90º,
sus dos lados iniciales L y L pueden ser iguales, menores o mayores 1 2
entre sí. Su punto inicial P (X , Y ) dado por usted y las demás variables 1 1 1
permiten encontrar a P (X , Y ), P (X , Y ) puntos restantes a través de2 2 2 3 3 3
· X = L Cos θ + X Y = L Sen θ + Y P (X , Y ), 2 1 1 2 1 1 2 2 2
· X = L Cos (θ + ω) + X Y = L Sen (θ+ ω) + Y P (X , Y )3 2 2 3 2 2 3 3 3
P3
P2 P1
Con θ = 180º ω = 90º L = 6 cm. L = 8 cm. P = (0,0)1 2 1
Triángulo Rectángulo
Figuras Geométricas IIFiguras Geométricas II
2323

Triángulo Acutángulo
Un triángulo es acutángulo cuando sus ángulos internos miden
menos de noventa grados. Cuando el ángulo suplementario mide
90º ω 180º si L L el triángulo conserva el carácter de acutángulo. 1 2
Pero se presenta además el caso cuando al construir un triángulo
acutángulo si el lado uno es menor que el lado dos, no se cumple para
todos los valores mayores de noventa y menores de ciento ochenta
grados, en la investigación del método Dabeja se encontró los valores
para los cuales el ángulo suplementario llega a un ángulo menor de ciento
ochenta grados siendo éste valor el máximo posible para que el triángulo -1
no cambie a obtusángulo, el valor está dado por la relación Cos [-L /L ]1 2
el cual depende de los lados uno y dos del triángulo, siendo ésta el límite
para el ángulo suplementario, entonces cuando el ángulo suplementario -1 “90º ω Cos [-L /L ]” si L < L también se construye un triángulo 1 2 1 2
acutángulo con ángulos internos menores de noventa grados. Valores, los
cuales son reemplazados en la fórmula de los puntos coordenados y
ordenados P (X ,Y ), P (X , Y )2 2 2 3 3 3
· X = L Cos θ + X Y = L Sen θ + Y P (X , Y ), 2 1 1 2 1 1 2 2 2
· X = L Cos (θ + ω) + X Y = L Sen (θ + ω) + Y P (X , Y )3 2 2 3 2 2 3 3 3
< < ≥
< <
P2
P1
L1
L2
P3
P2
P1
L1
L2
P3
θ = 230º ω = 135 L = 6 cm L = 8 cm P1 = (1,1). L L1 2 1 2
Triángulo acutángulo
Triángulo acutángulo
θ = 115º ω = 110 L = 7 cm L = 5 cm P1 = (4,-3). L L1 2 2 1
Figuras Geométricas IIFiguras Geométricas II
2424

Triángulo Obtusángulo
Un triángulo es obtusángulo cuando uno de sus ángulos internos mide más de noventa grados. Cuando el ángulo suplementario mide ω= 90º
si L L el triángulo conserva el carácter de obtusángulo. Pero se 1 2
presenta además, el caso cuando al construir un triángulo obtusángulo si el lado uno es menor que el lado dos, no se cumple para todos los valores mayores de noventa y menores de ciento ochenta grados, en la investigación del método Dabeja se encontró los valores para los cuales el ángulo suplementario llega a un ángulo mayor que la
-1 relación Cos [-L /L ] y menor a ciento ochenta grados siendo éste 1 2
valor el mínimo posible para que el triángulo no cambie, el valor está -1 dado por la relación Cos [-L /L ] el cual depende de los lados uno y dos 1 2
del triángulo, entonces cuando el ángulo suplementario toma valores -1“Cos [-L /L ] ω 180º ” si L < L también se construye un triángulo 1 2 1 2
obtusángulo. Valores los cuales son reemplazados en la fórmula de los puntos coordenados y ordenados P (X , Y ), P (X , Y ).2 2 2 3 3 3
· X = L Cos θ + X Y = L Sen θ + Y P (X , Y ), 2 1 1 2 1 1 2 2 2
· X = L Cos (θ + ω) + X Y = L Sen (θ + ω) + Y P (X , Y )3 2 2 3 2 1 3 3 3
≥
< <
P2
P1
L1
L2
P3
P2
P1
L1
L2
P3
Triángulo obtusángulo
Triángulo obtusángulo
θ = 60º ω = 140 L = 4 cm. L = 7 cm P1 = (0,0). L L1 2 1 2
θ = 25º ω = 60 L = 6.5 cm. L = 4 cm. P1 = (-1,0). L L1 2 2 1
Figuras Geométricas IIFiguras Geométricas II
2525

2.1 Demostración y construcciones
La demostración para el triángulo equilátero se presenta a continuación
X X = - Y = - 2 1 1X X Y Y Y2 1 2 1 2
X - X = A Y = 2 1 COSq - Y ASENq 2 1
X = A + X = 2 COSq Y ASENq + Y 1 2 1
X X = A Y = A2 1 COSq Y SENq2 1
X X = Y = 2 1 COSq Y SENq2 1
A A
X X = - Y = - 3 2 2X X Y Y Y3 2 3 2 3
X - X = A Y = 3 2 COS(q + w) - Y ASEN(q + w) 3 2
X = A + X = 3 COS(q + w) Y ASEN(q + w) + Y 2 3 2
X X = Y = 3 2 COS(q + w) Y SEN(q + w)3 2
A A
A
qP1 - (x , y )1 1
P2 - (x , y )2 2
x2
y2
X X = - Y = - 3 1 3X X Y Y Y1 3 3 1 1
X - X = A Y = 1 3 COS(q + 2w) - Y ASEN(q + 2w) 1 3
X = A + X = 1 COS(q + 2w) Y ASEN(q + 2w) + Y 3 1 3
X X = Y = 3 1 COS(q + w + w) Y SEN(q + w+ w)3 1
A A
Y3
Y2 P2
X2X3
q
w
w’
q
A
A
1P3
P3
X3
Y3
q
w
wA
A
A
P1 - (x , y )1 1
La demostración del triángulo equilátero, es semejante a las de los
demás triángulos, los cuales permiten visualizar el comportamiento de
los puntos con relación a los lados y los ángulos de rotación y
Figuras Geométricas IIFiguras Geométricas II
2626

suplementarios. Se debe aclarar que las fórmulas también son
semejantes para cada triángulo, los cuales se diferencian en los lados y
los ángulos según la clasificación. Al abordar los rangos de las variables
usted reconocerá aún más las diferencias y semejanzas de cada triángulo.
Aunque existen diversos autores que combinan los nombres de los
triángulos clasificándolos por sus lados y ángulos no entraremos en esa
discusión, ya que estamos reconociendo al método para construir los
triángulos con sus partes y propiedades a través de puntos coordenados y
ordenados en el plano cartesiano, sin necesidad de emplear las
herramientas del compás y el transportador.
2.1.3 Construcción de triángulos
Para construir cualquier tipo de triángulos se deben tener en cuenta las
consideraciones mencionadas en la construcción de polígonos regulares,
diferenciando al ángulo suplementario cuyo rango varía en cada
triángulo, el número de puntos coordenados y ordenados son tres y los
lados no siempre tienen el mismo valor.
A continuación se presenta la construcción de sólo tres triángulos a los
cuales no se clasificarán por sus lados ni ángulos, dejándole al lector su
clasificación.
Triángulo 1
P = (3,-2)1
L = 4 cm1
L = 4 cm2
q = 300°
w = 30°
Triángulo 2
P = (0,1)1
L = 7 cm1
L = 5 cm2
q = 158°
w = 90°
Triángulo 3
P = (-2,0)1
L = 2.5 cm1
L = 2.5 cm2
q = 230°
w = 1560°
Los puntos coordenados y ordenados restantes que se deben encontrar
para cualquier triángulo son P (X , Y ) y P (X , Y ), con coordenadas
· X = L Cos θ + X1 Y = L Sen θ + Y1 P (X , Y ), 1 1
· X = L Cos (θ+ ω) + X Y = L Sen (θ + ω) + Y P (X , Y )3 2 2 3 2 2 3 3 3
2 2 2 3 3 3
2 2 2 2 2
Figuras Geométricas IIFiguras Geométricas II
2727

Para el triángulo uno se tiene,
X = L Cos θ + X Y = L sen θ + Y 1 1 1 1
X = 4Cos (300) + 3 = 5 Y = 4Sen (300) -2 = -5.46 P = (5,-5.46)2 2 2
X = L Cos (θ + ω) + X Y = L sen (θ + ω) + Y 3 2 2 3 2 2
X = 4Cos (300+ 30) + 5 = 8.46 Y = 4Sen (300 + 30) -5.46 = -7.46 P = (8.46,-7.46)3 3 3
Para el triángulo dos,
X = L Cos θ + X Y = L sen θ + Y 2 1 1 2 1 1
X = 7Cos (158) + 0 = -6.49 Y = 7Sen (158) +1 = 3.62 P = (-6.49, 3.62)2 2 2
X = L Cos (θ + ω) + X Y = L sen (θ+ ω) + Y 3 2 2 3 2 2
X = 5Cos (158 + 90) -6.49 = -8.36 Y = 5Sen (158+90) + 3.62 = -1.01 P = (-8.36,-1.01)3 3 3
Para el triángulo tres,
X = L Cos θ + X Y = L sen θ + Y 2 1 1 2 1 1
X = 2.5Cos (230) -2 = -3.60 Y =2.5Sen (230) +0 = -1.91 P = (-3.60, -1.91)2 2 2
X = L Cos (θ + ω) + X Y = L sen (θ + ω) + Y 3 2 2 3 2 2
X = 2.5Cos (230 + 156) -3.60 = -1.35 Y = 2.5Sen (230 + 156) -1.91 =-0.81 P = (-1.35,-0.81)3 3 3
2 2
P3
P2
L2
L1
P1
Triángulo tres
Triángulo dos
P1
P2
P3
L2
L1
Figuras Geométricas IIFiguras Geométricas II
2828

P1P1
P2P2
P3P3
P4P4
CAPÍTULO 3
FIGURAS GEOMÉTRICAS III

3.1 CUADRILÁTEROS
Cuadrilátero, polígono de cuatro lados. La suma de sus ángulos
interiores es 360º. Los cuadriláteros tienen dos diagonales.
Se clasifican en paralelogramos (si tienen los dos pares de lados
opuestos iguales entre sí) y no paralelogramos.
Los paralelogramos son los cuadrados (los cuatro lados iguales y los
cuatro ángulos rectos), rectángulos (los cuatro ángulos rectos), rombos
(los cuatro lados iguales) y romboides (no tienen los lados iguales ni los
cuatro ángulos rectos).
Los no paralelogramos son los trapecios (dos de sus lados son
paralelos y los otros dos no) y los trapezoides (no tienen ningún par de
lados paralelos).
3.2 Conceptos y clasificación
Los cuadriláteros cuya clasificación en paralelogramos y no
paralelogramos pueden ser construidos como usted desee, cada uno de
ellos presenta datos iniciales que le permiten diferenciarse a través de sus
lados y ángulos suplementarios. Si sus lados son iguales 'L = L = L = L ' 1 2 3 4
y el ángulo suplementario es noventa grados 'ω= 90º' es el cuadrado. Si
los lados uno y tres son iguales pero diferentes a los lados dos y cuatro
que también son iguales '(L = L ) (L = L )' y el ángulo suplementario 1 3 2 4
mide noventa grados 'ω= 90º' es el rectángulo. Si sus lados son iguales
'L = L = L = L ' y el ángulo suplementario mide más de cero y menos de 1 2 3 4
ciento ochenta grados, 0 <ω<180º' es el rombo. Si los lados uno y tres
son iguales pero diferentes a los lados dos y cuatro que también son
iguales '(L = L ) (L = L )' y el ángulo suplementario mide más de cero y 1 3 2 4
menos de ciento ochenta grados, pero diferente a noventa grados
0<ω<180º ω 90º es el romboide. Los trapecios cuya clasificación en
isósceles, rectángulos y escalenos poseen características diferentes, si el
≠
≠
≠
Figuras Geométricas IIIFiguras Geométricas III
3030

lado uno es diferente al lado tres y a los lados dos y cuatro que son
iguales ''L L (L = L )' y el ángulo suplementario mide más de cero y 1 3 2 4
menos de ciento ochenta grados, pero diferente a noventa grados
'0<ω<180º ω 90º' es el trapecio isósceles. Para el trapecio rectángulo
pueden o no ser iguales los lados uno y dos pero siempre diferentes a los
lados tres y cuatro '[(L = L ) o (L L )] L L , y sus dos primeros 1 2 1 2 3 4
ángulos con relación a los puntos uno y dos miden noventa grados. Si los
todos los lados son diferentes 'L L L L ' y el ángulo suplementario 1 2 3 4
mide más de cero y menos de ciento ochenta grados, pero diferente a no-
venta grados '0 < ω < 180º, ω 90º, ω+ω`= 180º' es el trapecio escaleno.
3.3 Fórmulas del método Dabeja para cuadriláteros
Cada una es diferente a las demás teniendo en cuenta los lados y los
ángulos suplementarios pero conservan la misma cantidad de puntos
coordenados y ordenados en el plano cartesiano.
3.3.1 Cuadrado
También llamado polígono regular de 4-lados. Que tiene 4-puntos
coordenados y ordenados, P (X , Y ), P (X2 , Y ), P (X , Y ), P (X , Y ), 1 2 3 4
basados en las fórmulas del método Dabeja, las cuales encuentran los
puntos restantes.
Clasificado como el polígono regular de cuatro lados, por ello se
emplea la fórmula de los polígonos regulares de i-lados, siendo i= 4,
K= n-2, n= puntos coordenados, el ángulo suplementario ω = (360/i), +
i = 4, ω = 90º, el ángulo de rotación 0 θ 360º L = a cm. Con a Є R .
P (X , Y ) el punto inicial del cuadrado. Cada valor dado por usted a las 1 1 1
variables encuentran los tres puntos restantes
X = LCos (θ + k ω) + X Y = LSen (θ + k ω) + Y n n-1 n n-1
≠ ≠
≠
≠ ≠ ≠
≠ ≠ ≠
≠
1 1 2 2 3 3 4 4
< <
Figuras Geométricas IIIFiguras Geométricas III
3131

P1
P2
P3
P4
L2
L2
L1
L1
P1
P2
P3
P4
· X = LCos θ + X1 Y = LSen θ + Y1 P (X , Y ), 2
· X = LCos (θ + ω) + X Y = LSen (θ + ω) + Y P (X , Y )3 2 3 2 3 3 3
· X = LCos (θ + 2ω) + X Y = Lsen (θ + 2ω) +Y P (X , Y )4 3 4 3 4 4 4
2 2 2 2
θ = 60º ω = 90º L = 6 cm. P = (-2,2)1
Cuadrado
Rectángulo
3.3.3 Rectángulo
Construir un rectángulo sí:
Cuadrilátero cuyos ángulos interno y suplementario son iguales ω’ = ω = 90º, sus lados impares son iguales diferentes a los lados pares que también son iguales '(L = L ) (L = L )'. Su punto inicial 1 3 2 4
P (X , Y ) dado por usted y las demás variables permiten encontrar a 1
P (X , Y ) P (X , Y ), P (X , Y ) puntos restantes a través de2 2 2 3 3 3 4 4 4
· X = L Cos θ + X Y = L Sen θ + Y P (X , Y ), 2 1 1 2 1 1 2 2 2
· X = L Cos (θ + ω) + X Y = L Sen (θ + ω) + Y P (X , Y )3 2 2 3 2 2 3 3 3
· X = L Cos (θ + 2ω) + X Y = L sen (θ + 2ω) + Y P (X , Y )4 1 3 4 1 3 4 4 4
≠
1 1
,
θ = 75º ω = 90º L = 5.5 cm. L = 7.5 cm. P = (3,2)1 2 1
Figuras Geométricas IIIFiguras Geométricas III
3232

3.3.4 Rombo
Semejante al cuadrado, ya que todos sus lados son iguales pero sus
ángulos suplementarios son mayor que cero y menor a ciento ochenta
grados, los puntos que se deben encontrar sólo son tres ya que el punto
inicial es dado por usted, siendo P (X , Y ), P (X , Y ), P (X , Y4) los 2 2 2 3 3 3
puntos restantes hallados a través de:
· 2 1 2 1 2 2 2
· X = LCos (θ + ω) + X Y = LSen (θ + ω) + Y2 P (X , Y )3 2 3 3 3 3
· X = LCos (θ + ω + ω’) + X Y = Lsen (θ + ω + ω’) +Y P (X , Y )4 3 4 3 4 4 4
4 4
X = L Cos θ + X Y = L Sen θ + Y P (X , Y ), 1 1
P1
P2
P3
P4
θ = 200º ω = 80º L = 6.5 cm. P = (4,3)1
Rombo
3.3.5 Romboide
Semejante al rectángulo, con los lados uno y tres iguales pero
diferentes a los lados dos y cuatro que también son iguales
'(L = L ) (L = L )' y el ángulo suplementario mide más de cero y menos 1 3 2 4
de ciento ochenta grados, pero diferente a noventa grados 0º < ω < 180º
ω 90º teniendo que encontrar,
· 2 1 2 1 2 2 2
· X = L Cos (θ + ω) + X Y = L Sen (θ + ω) + Y P (X , Y )3 2 2 3 2 2 3 3 3
· X = L Cos (θ + ω + ω’) + X Y = L Sen (θ + ω + ω’) + Y P (X , Y )4 1 3 4 1 3 4 4 4
≠
≠
X = L Cos θ + X Y = L Sen θ + Y P (X , Y ), 1 1
Figuras Geométricas IIIFiguras Geométricas III
3333

P1
L1 L1
L2
L2
P2 P3
P4
θ = 325º ω = 20º L = 7 cm. L = 4 cm. P = (-3,1)1 2 1
Romboide
3.3.6 Trapecio isósceles
Cuadrilátero con el lado uno es diferente al lado tres pero paralelos y a
los lados dos y cuatro que son iguales “'L L (L = L )” y el ángulo 1 2 4
suplementario mide más de cero y menos de ciento ochenta grados, pero
diferente a noventa grados 0º < ω < 180º ω 90º' los puntos a encontrar
definidos por,
· X = L Cos θ + X Y = L Sen θ + Y P (X , Y ), 1 1
· X = L Cos (θ + ω) + X Y = L Sen (θ + ω) + Y P (X , Y )3 2 2 3 2 2 3 3 3
· X = L Cos (θ + ω’) + X Y = L Sen (θ + ω’) + Y P (X , Y )4 2 1 4 2 1 4 4 4
≠ ≠
≠
2 1 2 1 2 2 2
P4
P2
L2
L1
P3
P1L2
L3
θ = 15º ω = 25º L = 5 cm. L = 6 cm. P = (-1,1)1 2 1
Trapecio isósceles
Figuras Geométricas IIIFiguras Geométricas III
3434

3.3.7 Trapecio Rectángulo
Con características similares al rectángulo, ya que su ángulo
suplementario mide noventa grados ω = 90º, pero sus lados opuestos
son diferentes. Para el trapecio rectángulo pueden o no ser iguales los
lados uno y dos pero siempre diferentes a los lados tres y cuatro
'[(L = L ) o (L L )] L L , sus puntos coordenados están dados por,1 2 1 2 3 4
· X = L Cos θ + X1 Y = L Sen θ + Y P (X , Y ), 2 1 1
· X = L Cos (θ + ω) + X Y = L Sen (θ + ω) + Y P (X , Y )2 2 3
· X = L Cos (θ + 2ω) + X Y = L Sen (θ + 2ω) +Y P (X , Y )4 3 3 4 3 3 4 4 4
≠ ≠ ≠
2 1 2 2 2
3 2 3 2 3 3
P3
P1
L1
L3
L2 P2
P4
θ = 90º ω = 90º L = 6 cm. L = 6 cm. L = 8.5 cm. P = (2,-3)1 2 3 1
Trapecio rectángulo
3.3.8 Trapecio escaleno
Cuadrilátero llamado así por sus lados, pues todos tienen diferente
medida, “L L L L ” y el ángulo suplementario mide más de cero y 1 2 3 4
menos de ciento ochenta grados, pero diferente a noventa grados
0º < ω < 180º, ω 90º, ω + ω’ = 180º' sus puntos restantes,
X = L Cos θ + X Y = L Sen θ + Y P (X , Y ), 1 1
X = L Cos (θ + ω) + X Y = L Sen (θ + ω) + Y P (X , Y )3 2 2 3 2 2 3 3 3
X = L Cos (θ + ω+ ω’) + X Y = L Sen (θ + ω + ω’) + Y P (X , Y )4 3 3 4 3 3 4 4 4
≠ ≠ ≠
≠
2 1 2 1 2 2 2
Figuras Geométricas IIIFiguras Geométricas III
3535

P4 P3
P2L1
L3
L2
P1
θ = 0º ω = 135º L = 8 cm. L = 5 cm. L = 6 cm. P1= (-2,-4)1 2 3
Trapecio escaleno
3.4 Demostración y Construcciones
Aunque las demostraciones de los cuadriláteros no son iguales se
asemejan en la cantidad de puntos coordenados y ordenados, así solo se
presentaran dos de las seis demostraciones para que el lector pueda
resolverlos en sus estudios posteriores sobre el método Dabeja.
Demostración del rectángulo
X X = - Y = - 2 1 1X X Y Y Y2 1 2 1 2
X - X = A Y = 2 1 COSq - Y ASENq 2 1
X = A + X = 2 COSq Y ASENq + Y 1 2 1
X X = A Y = A2 1 COSq Y SENq2 1
X X = Y = 2 1 COSq Y SENq2 1
A A
y2
x2
P2
P1 = (X , Y )1 1
A
q
X X = - Y = - 3 2 2X X Y Y Y3 2 3 2 3
X - X = B Y = 3 2 COS(q + w) - Y BSEN(q + w) 3 2
X = B + X = 3 COS(q + w) Y BSEN(q + w) + Y 2 3 2
X X = Y = 3 2 COS(q + w) Y SEN(q + w)3 2
B B y2
y3
x2x3
P3
P2
A
B
qw
q
Figuras Geométricas IIIFiguras Geométricas III
3636

X X = - Y = - 3 4 3X X Y Y Y4 3 3 4 4
X - X = A Y = 4 3 COS(q + 2w) - Y ASEN(q + 2w) 4 3
X = A + X = 4 COS(q + 2w) Y ASEN(q + 2w) + Y 3 4 3
X X = Y = 3 4 COS(q + w + w) Y SEN(q + w + w)3 4
A A
X X = - Y = - 4 1 4X X Y Y Y1 4 4 1 1
Y - Y = BSEN(1 4 q + 3w)
X = B + 3w) + X1 COS(q 4
Y = B + 3w) + Y1 SEN(q 4
X - X = B1 4 COS(q + 3w)
X X = 4 1 COS(q + w + w + w)
X X = 4 1 SEN(q + w + w + w)
B
By4
P4
x4
B
B
P1 1 1= (x , y )
A
A
q
w
w
w
q
y3
y4
P4
x4 x3
B
A
A
qw
w
q
P2
P1 = (x , y )1 1
y2
x2
A
Demostración del trapecio isósceles
X X = - Y = - 2 1 1X X Y Y Y2 1 2 1 2
X - X = A Y = 2 1 COSq - Y ASENq 2 1
X = A + X = 2 COSq Y ASENq + Y 1 2 1
X X = A Y = A2 1 COSq Y SENq2 1
X X = Y = 2 1 COSq Y SENq2 1
A A
Figuras Geométricas IIIFiguras Geométricas III
3737

X X = - Y = - 3 2 2X X Y Y Y3 2 3 2 3
Y - Y = BSEN(3 2 q + w)
X = B + w) + X3 COS(q 2
Y = B + w) + Y3 SEN(q 2
X - X = B3 2 COS(q + w)
X X = 3 2 COS(q + w)
X X = 3 2 SEN(q + w)
B
BP2
P3
x2x3
q
q
wB
y2
y3
X X = - Y = - 4 1 1X X Y Y Y4 1 4 1 4
Y - Y = BSEN(4 1 q + w’)
X = B + w’) + X4 COS(q 1
Y = B + w’) + Y4 SEN(q 1
X - X = B4 1 COS(q + w’)
X X = 4 1 COS(q + w’)
X X = 4 1 SEN(q + w’)
B
B
C
A
B
B
q
w’
P4 y4
x4 P1 = (x , y )1 1
Demostración del rombo
X X = - Y = - 2 1 1X X Y Y Y2 1 2 1 2
X - X = A Y = 2 1 COSq - Y ASENq 2 1
X = A + X = 2 COSq Y ASENq + Y 1 2 1
X X = A Y = A2 1 COSq Y SENq2 1
X X = Y = 2 1 COSq Y SENq2 1
A AA
x2
P2y2
P1 = (x , y )1 1
Figuras Geométricas IIIFiguras Geométricas III
3838

q
qw’
w
w
A
A
A
Ay4
x4 P1 = (x , y )1 1
X X = - Y = - 3 2 2X X Y Y Y3 2 3 2 3
X - X = A Y = 3 2 COS(q + w) - Y ASEN(q + w) 3 2
X = A + X = 3 COS(q + w) Y ASEN(q + w) + Y 2 3 2
X X = Y = 3 2 COS(q + w) Y SEN(q + w)3 2
A A
X X = - Y = - 3 4 3X X Y Y Y4 3 3 4 4
Y - Y = ASEN(4 3 q + w + w’)
X = A + w ’) + X4 COS(q + w 3
Y = A + w ’) + Y4 SEN(q + w 3
X - X = A4 3 COS(q + w + w’)
X X = 3 4 COS(q + w + w’)
X X = 3 4 SEN(q + w + w’)
A
A
X X = - Y = - 4 1 4X X Y Y Y1 4 4 1 1
Y - Y = ASEN(1 4 q + 2w + w’)
X = A + 2w ’) + X1 COS(q + w 4
Y = A + 2w ’) + Y1 SEN(q + w 4
X - X = A1 4 COS(q + 2w + w’)
X X = 4 1 COS(q + w + w’ + w)
Y Y = 4 1 SEN(q + w + w’ + w)
A
A
Figuras Geométricas IIIFiguras Geométricas III
3939

En la construcción de cuadriláteros los valores dados por usted son el
punto inicial, el ángulo de rotación, el ángulo suplementario, el valor de
los lados según la figura. Debe tener en cuenta que el número de puntos
coordenados y ordenados son cuatro y las consideraciones mencionadas
anteriormente.
A continuación se presenta la construcción de cada cuadrilátero con
sus datos iniciales para hallar los tres puntos restantes a través de las
fórmulas para cada uno.
Cuadrado
P = (1,1)1
L = 4 cm.1
L = 4 cm.2
L = 4 cm.3
q = 185°
w = 90°
Rectángulo
P = (0,-2)1
L = 4 cm.1
L = 7 cm.2
L = 4 cm.3
q = 30°
w = 90°
Rombo
P = (-2,-7)1
L = 6 cm.1
L = 6 cm.2
L = 6 cm.3
q = 55°
w = 132°
Romboide
P = (4,3)1
L = 7 cm.1
L = 4 cm.2
L = 7 cm.3
q = 122°
w = 40°
Trapecioisósceles
P = (0,1)1
L = 6.5 cm.1
L = 5 cm.2
L = 5 cm.3
q = 80°
w = 75°
Trapeciorectángulo
P = (-2,0)1
L = 5 cm.1
L = 6 cm.2
L = 7 cm.3
q = 340°
w = 90°
Para la construcción de los cuadriláteros omitiremos el procedimiento
numérico y sólo aparecerán las fórmulas y los puntos coordenados y
ordenados de manera aproximada.
Cuadrado
X = LCos θ + X Y = LSen θ + Y P = (-3, 0.6)2 1 2 1 2
X = LCos (θ + ω) + X Y = Lsen (θ + ω) + Y P = (-2.6, -3.3)3 2 3 2 3
X = LCos (θ + 2ω) + X Y = LSen (θ + 2ω) + Y P = (1.3, -3)4 3 4 3 4
P2
P1
P3P4
θ = 185º ω = 90º L = 4 cm. P = (1,1)1
Cuadrado
Figuras Geométricas IIIFiguras Geométricas III
4040

Rectángulo
X = L Cos θ + X Y = L Sen θ + Y P = (3.5, 0)2 1 1 2 1 1 2
X = L Cos (θ + ω) + X Y = L Sen (θ + ω) + Y P = (0, 6.1)3 2 2 3 2 2 3
X = L Cos (θ + 2ω) + X3 Y = L Sen (θ + 2ω) +Y P = (-3.5, 4.1)4 1 4 1 3 4
P2
L2
L1
P1
P4
P3
θ = 30º ω = 90º L = 7 cm. P = (0,2)1 L = 4 cm. 1 2
θ = 55º ω = 132º L = 6 cm. P = (-2,-7)1
Rectángulo
Rombo
Rombo
X = LCos θ + X Y = LSen θ + Y P = (1.4, -2.1)2 1 2 1 2
X = LCos (θ + ω) + X Y = LSen (θ + ω) + Y P = (-4.5, -2.8)3 2 3 2 3
X = LCos (θ + ω + ω’) + X Y = LSen (θ + ω + ω’) + Y P = (-7.9, -7.7)4 3 4 3 4
P2
P1
P4
P3
Figuras Geométricas IIIFiguras Geométricas III
4141

P2
P1
P4
P3
Romboide
Trapecio isósceles
θ = 122º ω = 40º L = 7 cm. P = (4,3)1 L = 4 cm. 1 2
θ = 80º ω = 75º L = 6.5 cm. P = (0,1)1 L = cm. 1 2
Trapecio isósceles
X = L Cos θ + X Y = L Sen θ + Y P = (1.1, 7.4)2 1 1 2 1 1 2
X = L Cos (θ + ω) + X Y = L Sen (θ + ω) + Y P = (-3.4, 9.5)3 2 2 3 2 2 3
X = L Cos (θ + ω’) + X Y = L Sen (θ + ω’) + Y P = (-5, 0.6)4 2 1 4 2 1 4
P2
P1P4
P3
Romboide
X = L Cos θ+ X Y = L Sen θ + Y P = (0.3, 8.9)2 1 1 2 1 1 2
X = L Cos (θ+ ω) + X Y = L Sen (θ + ω) + Y P = (-3.5, 10.2)3 2 2 3 2 2 3
X = L Cos (θ+ ω+ ω’) + X Y = L Sen (θ + ω+ ω’) +Y P = (0.2, 4.2)4 1 3 4 1 3 4
Figuras Geométricas IIIFiguras Geométricas III
4242

P2
P1
P4
P3
θ = 340º ω = 90º L = 5 cm. L = 6 cm. L = 7 cm. P = (-2,0)1 2 3 1
Trapecio rectángulo
Trapecio rectángulo
X = L Co θ + X Y = L Sen θ + Y P = (2.7, -1.7)2 1 1 2 1 1 2
X = L Cos (θ + ω) + X Y = L Sen (θ + ω) + Y P = (4.7, 3.9)3 2 2 3 2 2 3
X = L Cos (θ + ω+ ω’) + X Y = L Sen (θ + ω + ω’) +Y P = (-1.8, 6.3)4 3 3 4 1 3 4
s
Figuras Geométricas IIIFiguras Geométricas III
4343


CAPÍTULO 4
FIGURAS GEOMÉTRICAS IV
’P 3
P3 P 2
’
P2
P 1
’
P1
P 5
’
P5
P4
P 4
’

4.1 ESTRELLAS Y OTROS
Las figuras como las estrellas de n-puntas, el teorema de Pitágoras, el
tangram entre otras, hacen parte del método Dabeja. Las cuales son
construidas a través de puntos coordenados y ordenados de forma
semejante a otras figuras anteriormente vistas, los datos iniciales son
dados por usted, así que siempre se hallará un punto menos de los que
conforman las figuras.
4.2 Fórmulas
ESTRELLAS DE N-PUNTAS
Toda estrella poligonal regular de n-puntas tiene puntos coordenados y
ordenados, con L Є R,
0º q 360° respecto a la horizontal K = n-2, J = n-1, w = (360/i), i = al
número de lados. La construcción de estrellas poligonales de n-puntas,
se basa en la combinación de las fórmulas:
< <
P = (X ,Y )1 1 1
P = (X ,Y )1
’ ’
n- n-1 n-1
P = (X ,Y ),2 2 2’P = (X ,Y ),n
’ ’
n n
P = (X ,Y ),3 3 3
’P = (X ,Y )1
’ ’
1 1
P = (X ,Y )n n n
’P = (X ,Y ),2
’ ’
2 2’P = (X ,Y ),3
’ ’
3 3
X = LCOS(q + Kw) + Xn n-1
Y = LSEN(q + Kw) + Yn n-1
’X = LCOS(q + Jw + 240°) + Xn n+1
Y = LSEN(q + w + ’ J 240°) + Yn n+1
Puntos del polígono regular
Puntos externos
La construcción de estrellas relaciona la fórmula general de los
polígonos regulares y la de los puntos externos a ellos que generan
triángulos equiláteros al trazar segmentos, encontrando un polígono
regular.
Figuras Geométricas IVFiguras Geométricas IV
4646

’P 3
P3 P 2
’
P2
P 1
’
P1
P 5
’
P5
P4
P 4
’
θ = 45º ω = 72º L = 4 cm. P = (0,0)1
Estrella pentagonal
TEOREMA PITÁGORAS
El teorema de Pitágoras basado en los cuadrados de los lados de un
triángulo rectángulo, se puede construir gráficamente a través del
método Dabeja con los puntos coordenados en el plano cartesiano.
Con los datos propuestos, encuentran los puntos restantes:
X = L COS(q + 270°) + X Y = L SEN(q + 270°) + Y2 1 1 2 1 2
X = L COS(q + 90°) + X Y = L SEN(q + 90°) + Y4 1 3 4 1 3
X = L COS(q + 90°) + X Y = L SEN(q + 90°) + Y6 2 5 6 2 5
X = L COS(q + 180°) + X Y = L SEN(q + 180°) + Y7 2 6 7 2 6
X = L COS(q + a + 90°) + X Y = L SEN( ) + Y8 3 7 8 3 7q + a + 90°
X = L COS(q + a + 180°) + X Y = L SEN( ) + Y9 3 8 9 3 8q + a + 180°
X = L COS(q) + X Y = L SEN(q) + Y3 1 2 3 1 2
X = L COS(q) + X Y = L SEN(q) + Y5 2 4 5 2 4
2 2 -1P1 = (X , Y ), 0º q 360° L = a cm. L = b cm. L = (L ) + (L ) a = COS 1 2 3 1 21 1< < L1
L2
Figuras Geométricas IVFiguras Geométricas IV
4747

P6
P3
P1
P9
P7
P5
P4
P2
P8
-1θ = 0º = Cos (4/3) L = 4 cm. L = 3 cm. P = (2,2)1 2 1
Teorema de Pitágoras
L =1
a
2 2L =3
a
2
TANGRAM
Los rompecabezas mecánicos o manuales como el Tangram chino, popular desde 1800, emplea siete piezas de forma geométrica, cortadas a partir de un cuadrado, para formar un sinfín de posibilidades de siluetas muy sugerentes de personas, animales y cosas. El método Dabeja permite construirlo con puntos coordenados y ordenados relacionando el lado del cuadrado con sus proporciones de las figuras internas que lo componen, sí L = a1
entonces y , P = (X , Y ), 0 < q < 360°1 1 1
Con los datos propuestos, encuentran los puntos restantes:
X = L COS(q) + X Y = L SEN(q) + Y2 1 1 2 1 2
X = L COS(q + 225°) + X Y = L SEN(q + 225°) + Y4 2 3 4 1 3
X = L COS(q + 225°) + X Y = L SEN(q + 225°) + Y6 2 5 6 2 5
X = L COS(q + 90°) + X Y = L SEN(q + 90°) + Y7 4 6 7 2 6
X = L COS(q + 45°) + X Y = L SEN( ) + Y8 3 7 8 3 7q + 45°
X = L COS(q + 180°) + X Y = L SEN( ) + Y9 3 8 9 3 8q + 180°
X = L COS(q + 270°) + X Y = L SEN( ) + Y10 3 9 10 3 9q + 270°
X = L COS( ) + X Y = L SEN( ) + Y3 1 2 3 1 2q + 90° q + 90°
X = L COS(q ) + X Y = L SEN(q ) + Y5 2 4 5 2 4+ 225° + 225°
Figuras Geométricas IVFiguras Geométricas IV
4848

P8P9
P7
P10
P1
P2
P4
P5
P6
P3
Se solicita al lector que visualice punto a punto el movimiento que se
tiene según la fórmula del mismo, por ejemplo del punto dos al punto tres
se adiciona un ángulo de 90º el cual indica el movimiento de un punto a
otro, estas secuencias de rotación interna permiten encontrar relaciones
de cada figura.
Figuras Geométricas IVFiguras Geométricas IV
4949


CAPÍTULO 5
FIGURAS GEOMÉTRICAS V
P 1’
P 2’
P2
P1
P3
P 3’

5.1 Aplicaciones
Las aplicaciones son de movimientos y transformaciones en el plano,
la traslación, la rotación, simetrías y homotecias, estas se hacen también
a través de las figuras y los puntos de rotación o traslación de la misma,
las homotecias de la figura se transforma, aumenta o disminuye el
tamaño de la figura desde los puntos coordenados y ordenados dando
mayor visualización de los movimientos que las figuras en el plano
pueden hacer.
5.2 Movimientos
Traslación, de vector, es una transformación geométrica que hace
corresponder a cada punto P otro punto P’. Las traslaciones son
movimientos directos, es decir, mantienen la forma y el tamaño de las
figuras, a las cuales deslizan según el vector.
Con el método DABEJA las traslaciones de las figuras son muy
sencillas de realizar sólo se necesita saber la magnitud de la traslación y
su dirección, ya que los datos iniciales se mantienen como es el valor de
los lados y su ángulo de rotación, entonces si se desea trasladar un
triángulo, con sus puntos iniciales P = (X , Y ) son reemplazados por el 1
’nuevo punto inicial por otro P = (X , Y ) los nuevos puntos son 1 1 1
encontrados por la fórmula para cada figura.
’Ejemplo: trasladar al punto P = (2, 0) un triángulo equilátero de 8 cm. 1
de lado con una rotación de 105° con P = (2, 4).1
Para el triángulo se tiene, L = 8 cm. q = 105° w = 120° P = (-2, 4).1
1 1
X = L Cos q + X2 1 1
X = L Cos (q + w) + X3 2 2
X = 8Cos (105 - 2) = -4.0705522
X = 8Cos (105 + 120) -4.07 = -9.723
Y = L Sen q + Y2 1 1
Y = L Sen (q + w) + Y3 2 2
Y = 8Sen (105) + 4 = 11.7274062
Y = 8Sen (105 + 120) + 11.72 = 6.723
P = (-4.07,11.72)2
P = (-9.72, 6.72)3
Figuras Geométricas VFiguras Geométricas V
5252

Para el triángulo que se desea trasladar se tiene, L = 8 cm. q = 105° w = 120° P’ = (2,0)1
X = L Cos q + X2 1 1
X = L Cos (q + w) + X2 2 2
X = 8Cos (105) + 2 = -0.0705522
X = 8Cos (105 + 120) -0.07 = -5.723
Y = L Sen q + Y2 1 1
Y = L Sen (q + w) + Y3 2 2
Y = 8Sen (105) + 0 = 7.7274062
Y = 8Sen (105 + 120) + 7.72 = 2.723
P’ = (-0.07, 7.72)2
P’ = (-5.72, 2.72)3
Puntos iniciales
P = (2,4)1 P’ = 1 (2,0)
P = 2 (4.07, 11.72) P’ = 2 (0.07, 7.72)
P = 3 (9.72, 6.72) P’ = 3 (5.72, 2.07)
Puntos imágenes
Se muestra la tabla con los puntos iniciales y los puntos imágenes del
triángulo trasladado y la gráfica en el plano cartesiano. A través del
cálculo de distancia se encuentra que la figura se trasladó 32 cm., los
demás datos se pueden calcular empleando las fórmulas básicas o por
inspección
P 1’
P 2’
P2
P1
P3
P’3
Triángulo trasladado de P a P’1 1
Figuras Geométricas VFiguras Geométricas V
5353

Rotación
Las figuras se rotan a través de un ángulo, cuya función es mover la
figura teniendo en cuenta el movimiento rotacional de los puntos
iniciales de la figura a otros nuevos llamados puntos rotados, estos
identifican a su vez movimientos circulares si ésta se rota
indefinidamente generan círculos inscritos y circunscritos, con el
método DABEJA, se pueden rotar desde un punto cualquier figura ya
que se tiene el mismo valor de los lados de la figura, su ángulo
suplementario y su primera rotación respecto de la horizontal.
La figura muestra la rotación a 10º de cuadrados de L =10 cm. de ladodesde un mismo punto
La tabla nos muestra como se va rotando la figura sobre un mismo
punto inicial, recordando que estos puntos se originan con las fórmulas
del método DABEJA según la figura que se desee construir. Se rotará un
pentágono regular con los siguientes datos iniciales L = 4 cm. ω = 72º
P = (1,1) teniendo en cuenta que la fórmula del pentágono regular 1
siempre tendrá el mismo punto inicial P1 por tanto sólo aparecerán los
cuatro puntos restantes y el ángulo de rotación de la figura para
diferenciarlos unos de otros, por conveniencia se escribirá una cifra
decimal la cual será la aproximada de los datos con valores reales que son
empleados en cada punto coordenado.
Figuras Geométricas VFiguras Geométricas V
5454

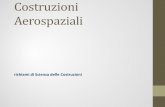
q = 15° q = 30° q = 55° q = 80° q = 100°
P = (-3, 7.9)2
P = (-4.3, -4.5)5
P = (-10.8, 6.3)3
P = (-11.7, -1.7)4
P = (-0.4, 8.9)2
P = (-6.2, -2.8)5
P = (-8.3, 10)3
P = (-11.8, 2.8)4
P = (2.4, 8.9)2P = (5.6, 7.5)2P = (7.9, 5)2P = (8.7, 3.1)2
P = (-6.9, -0.1)5P = (-6.6, 3.3)5P = (-4.9, 6.3)5P = (-3.4, 7.7)5
P = (-4.7, 12.6)3P = (0.8, 13.9)3P = (6.3, 12.8)3P = (9.1, 11.1)3
P = (-10.4, 7.1)4P = (-6.8, 11.3)4P = (-1.7, 13.7)4P = (1.7, 13.9)4
q = 120°
P2
P2
P2
P2P2
P2
P3
P3
P3
P3
P3
P3
P4P4
P4
P4
P4
P4
P5
P5
P5
P5
P5
P5
P1
Pentágonos rotados desde θ =15º, 30º, 55º, 80º, 100º y 120ºcon P = (0,0) con L = 8 cm.1
Homotecias
Una homotecia es una trasformación geométrica que, a partir de un
punto fijo, multiplica todas las distancias por un mismo factor. Es una
amplificación. Su definición rigurosa es vectorial “Sea E un espacio
vectorial sobre un cuerpo K. Sea Ω un elemento (visto como un punto) de
E, y kεK un escalar
WM ’ = KWM
Al abordar la fórmula de cualquier figura del método DABEJA, en
esta sección se espera que el docente o estudiante ya esté familiarizado
con las fórmulas , y los cálculos numéricos la relación que se encuentra
Figuras Geométricas VFiguras Geométricas V
5555

es que la figura siempre va aumentar o a disminuir según el valor del
lado que se le dé a la figura, puede conservar el mismo punto inicial y si
ángulo de rotación inicial rotación, para poder darle una inversión se
debe aumentarle al ángulo de rotación 180º (θ + 180º). Se recomienda al
lector que practique inicialmente con figuras de pocos lados para
efectuar los cálculos numéricos fácilmente e ir experimentando poco a
poco con las demás figuras. y
x
Las homotecias de un triángulo equilátero inicialmente con L = 6 cm. θ = 180º
Sea un trapecio con las siguientes mediadasL = 6 cm. L = 4.4 cm. θ = 70º ω = 60º aumentar 5/2 1y3 2y4
Para construir este trapecio vamos a emplear un caso especial con las
fórmulas del Rectángulo cuando en ellas se utilizan el ángulo
suplementario con un valor diferente al de 90º por ejemplo “ω = 60º”
Los puntos del trapecio son
Rectángulo
X = L Cos θ + X Y = L sen θ + Y P = (3.05, 7.6)2 1 1 2 1 1 2
X = L Cos (θ + ω) + X Y = L sen (θ + ω) + Y P = (0.22, 11)3 2 2 3 2 2 3
X = L Cos (θ + 2ω) + X Y = L sen (θ + 2ω) + Y P = (-5.7, 10)4 1 3 4 1 3 4
Entonces la homotecia a 5/2 es igual
X = 5/2(L Cos θ) + X Y = 5/2(L Sen θ) + Y P = (6.1, 16 1)2 1 1 2 1 1 2
X = 5/2(L Cos (θ + ω)) + X Y = 5/2(L Sen (θ+ ω)) + Y P3= (-0.9, 24.5)3 2 2 3 2 2
X = 5/2(L Cos (θ + 2ω)) + X Y = 5/2(L Sen (θ+ 2ω))+Y P = (-15.7, 21.9)4 1 3 4 1 3 4
Figuras Geométricas VFiguras Geométricas V
5656

L = 6 cm. L = 4.4 cm. θ = 70º ω = 60º y homotecia a 5/21y3 2y4
El cambio de fórmulas para encontrar un trapecio se debe al
movimiento interno de los puntos, transformándose en semejante ya que
es un cuadrilátero, recordando que el ángulo interno debe ser diferente a
90º este cambio no garantiza el saber con exactitud que tipo de trapecio
se construirá, por eso se recomienda realizar este ejercicio con las
fórmulas de los trapecios. Los movimientos en el plano pueden ser
profundizados por parte del lector con sus demostraciones, aplicando
además las propiedades de las isometrías.
P3
P2
P2
P1
P4
P4
Figuras Geométricas VFiguras Geométricas V
5757


CAPÍTULO 6
FIGURAS GEOMÉTRICAS VI

6.1 Cuerpos geométricos
Las construcciones de los cuerpos geométricos se realizan a través de
las figuras hechas en el plano de manera que el docente con los puntos
coordenados y ordenados traza, dobla y recorta la figura para luego
pegarla formando así la figura tridimensional deseada. Aunque son
demasiados los cuerpos geométricos veremos la construcción de las más
representativas como el cubo, la pirámide de base triangular y
pentagonal, el octaedro y el icosaedro entre otros.
6.2 Fórmulas y Construcciones
POLIEDROS REGULARES
Un poliedro es regular si todas sus caras son polígonos regulares iguales.
En los poliedros regulares se cumple una curiosa relación:
Número de caras + número de vértices = número de aristas + 2
Solo hay cinco poliedros regulares, que son: el tetraedro, el hexaedro o
cubo, el octaedro, el dodecaedro y el icosaedro.
El tetraedro tiene 4 caras, que son triángulos equiláteros.
El cubo tiene 6 caras, que son cuadrados.
El octaedro tiene 8 caras, que son triángulos equiláteros.
El dodecaedro tiene 12 caras, que son pentágonos regulares.
El icosaedro tiene 20 caras, que son triángulos equiláteros.
Una caja de zapatos, un dado y muchos otros objetos con superficies
planas que ves a tu alrededor, tienen forma poliédrica. Se llaman
poliedros a los cuerpos geométricos cuyas caras son polígonos.
Los poliedros se clasifican en prismas y en pirámides.
PRISMAS
Los prismas tienen dos caras (sus bases) que son iguales y paralelas
Figuras Geométricas VIFiguras Geométricas VI
6060

entre sí. Sus caras laterales son paralelogramos.
Los elementos de un prisma son los siguientes:
Las bases: son la cara en la que se apoya el prisma y su opuesta.
Las caras laterales: son las caras que comparten dos de sus lados con las
bases. La suma de sus áreas es la superficie lateral del prisma.
Las aristas: son los lados de las bases y de las caras laterales.
Los vértices: son los puntos en donde se encuentran cada par de aristas.
Las diagonales: son segmentos que unen dos vértices no consecutivos
del prisma. Se pueden trazar las diagonales de una cara o entre dos caras.
Los prismas se nombran según sea el polígono de sus bases: prisma
triangular, cuadrangular, pentagonal, hexagonal…
PIRÁMIDES
Una tienda de campaña o las pirámides de Egipto son ejemplos de este
tipo de poliedros. Poliedros limitados por una base, que es un polígono
cualquiera, y varias caras laterales, que son triángulos con un vértice
común llamado vértice de la pirámide. La altura de la pirámide es la
distancia del vértice a la base. Una pirámide se llama triangular,
cuadrangular, pentagonal… según que su base sea un triángulo, un
cuadrilátero, un pentágono…Una pirámide es regular si su base es un
polígono regular y el vértice se proyecta (cae perpendicularmente) sobre
el centro de la base. En una pirámide regular las caras laterales son
triángulos isósceles cuyas alturas se llaman apotemas de la pirámide.
Los elementos de una pirámide son:La base: es la cara en la que se apoya la pirámide. Las caras laterales: son las caras que comparten uno de sus lados con la
base. La suma de sus áreas es la superficie lateral de la pirámide. Las aristas: son los lados de las bases y de las caras laterales. Los vértices: son los puntos en donde se encuentran cada par de aristas. Las apotemas: son las alturas de las caras laterales de la pirámide.
Con el método DABEJA es posible construir los poliedros regulares,
prismas y pirámides teniendo en cuenta su base poligonal, los puntos
Figuras Geométricas VIFiguras Geométricas VI
6161

coordenados y ordenados y los datos iniciales que usted desee. A
continuación presentaremos algunas de las construcciones de pirámides
de diversas bases poligonales.
Tetraedro o Pirámide de base triangular
El tetraedro tiene 4 caras, que son triángulos equiláteros. Su base y
caras triangulares componen su forma las cuales con sus seis puntos
coordenados y ordenados identifican características propias de los
triángulos, los dobleces de la figura que según el material que se utilice
para su construcción y las pestañas para pegarla que pueden estar a un
centímetro del lado, son las consideraciones especiales para la
construcción de los cuerpos geométricos. Sus puntos se encuentran
teniendo en cuenta los siguientes datos iniciales
P = (X , Y ) punto inicial de la figura, 0 θ 360º ángulo de rotación, 1 1 1
+L = a cm. Lados del polígono con L Є R , ω = 120º
< <
Con los datos propuestos, encuentran los puntos restantes:
X = L COS(q) + X Y = L SEN(q) + Y2 1 1 2 1 2
X = LCOS(q + w) + X Y = LSEN(q + ) + Y4 3 4 3w
X = LCOS(q + ) + X Y = LSEN(q + 2 ) + Y6 5 6 5w w
X = LCOS( ) + X Y = LSEN( ) + Y3 2 3 2q q
X = LCOS(q ) + X Y = LSEN(q ) + Y5 4 5 4+ w + w
P5
P4
P3
P2P1
P6
Tetraedro con pestañas
Figuras Geométricas VIFiguras Geométricas VI
6262

Pirámide de base pentagonal
Su base es un pentágono y caras triangulares compuesto por diez
puntos coordenados y ordenados los cuales se encuentran teniendo en
cuenta los siguientes datos iniciales
P = (X , Y ) punto inicial de la figura º º ángulo de rotación, 1
+L = A cm. Lados del polígono con L Є R , ω = 72º.
, 0 θ 3601 1 < <
Con los datos propuestos, encuentran los puntos restantes:
P5
P4
P3
P2P1
P6P7
P8
P9
P10
Pirámide de base pentagonal con pestañas
Figuras Geométricas VIFiguras Geométricas VI
6363
( ) ( ) 2212 YLSENYXLCOSX +=+= qq
( ) ( ) 2323 44 YLSENYXLCOSX ++=++= wqwq
( ) ( ) 3434 364º364 YLSENYXLCOSX +++=+++= wqwq
22
46
5
46
5
YYY
XXX
+=
+=
( ) ( ) 7676 YLSENYXLCOSX +=+= qq
8787 22YLSENYXLCOSX +÷
øö
çèæ +=+÷
øö
çèæ += wqwq
( ) ( ) 2828 YLSENYXLCOSX ++=++= wqwq( ) ( ) 8989 22 YLSENYXLCOSX ++=++= wqwq
( ) ( ) 910910 33 YLSENYXLCOSX ++=++= wqwq

Reconociendo sus propiedades, se pueden deducir los demás datos
que en cualquier clase se deben manejar, como el área de la base, la
altura, y demás que el docente estime necesario según el planteamiento
de la clase.
Octaedro
Poliedro de ocho caras, que son triángulos equiláteros. Se suele designar
genéricamente así al octaedro regular, poliedro formado por ocho
triángulos equiláteros idénticos, compuesto por diez puntos coordenados y
ordenados. P1 = (X , Y ) punto inicial de la figura, 0º θ 360º ángulo de 1 1
+rotación, L=a cm. Lados del polígono con L Є R , ω = 72º
< <
Con los datos propuestos, encuentran los puntos restantes:
X = LCOS(q) + X Y = LSEN(q) + Y2 1 2 2
X = LCOS(q + ) + X Y = LSEN(q + ) + Y4 3 4 3w + w’ w’
X = LCOS(q + ) + X Y = L SEN(q + ) + Y6 5 6 2 5w’ w’
X = LCOS(q + ) + X Y = LSEN(q + ) + Y7 6 7 6w + w’ w + w’
X = LCOS(q + ) + X Y = LSEN( ) + Y8 7 8 7w q + w
X = LCOS(q + 2 ) + X Y = L SEN( ) + Y9 8 9 3 8w q + 2w
X = LCOS(q + ) + X Y = L SEN( ) + Y10 9 10 3 9w + w’ q + w + w’
X = LCOS( ) + X Y = LSEN( ) + Y3 2 3 2q + 2w + w’ q + 2w + w’
X = LCOS(q) + X Y = LSEN(q) + Y5 4 5 4
Figuras Geométricas VIFiguras Geométricas VI
6464

P5
P7 P6P9
P4 P5
P3
P2
P1
P10
Octaedro con puntos coordenados
Hexaedro o Cubo
Poliedro de seis caras, que son cuadrados, compuesto por catorce
puntos coordenados y ordenados. P1 = (X , Y ) punto inicial de la 1 1
figura, 0º θ 360º ángulo de rotación, L = A cm. Lados del polígono +con L Є R , ω = 90º
< <
Con los datos propuestos, encuentran los puntos restantes:
X = LCOS(q) + X Y = LSEN(q) + Y2 1 2 2
X = LCOS(q) + X Y = LSEN(q) + Y4 3 4 3
X = LCOS( ) + X Y = LSEN( ) + Y6 5 6 5q + 2w q + 2wX = LCOS( ) + X Y = LSEN( ) + Y7 6 7 6q + 3w q + 3wX = LCOS( ) + X Y = LSEN( ) + Y8 7 8 7q + 3w q + 3wX = LCOS( ) + X Y = LSEN( ) + Y9 8 9 8q + 2w q + 2wX = LCOS( ) + X Y = LSEN( ) + Y10 9 10 9q + w q + wX = LCOS( ) + X Y = LSEN( ) + Y11 10 11 10q + w q + w
X = LCOS( ) + X Y = LSEN( ) + Y12 11 12 11q + 2w q + 2wX = LCOS( ) + X Y = LSEN( ) + Y13 12 13 12q + w q + w
X = LCOS( ) + X Y = LSEN( ) + Y14 13 14 13q q
X = LCOS( ) + X Y = LSEN( ) + Y3 2 3 2q + 3w q + 3w
X = LCOS( ) + X Y = LSEN( ) + Y5 4 5 4q + 3w q + 3w
Figuras Geométricas VIFiguras Geométricas VI
6565

P1
P14P13
P12 P11
P2
P3
P6 P5
P7
P8
P10
P9
P4
Hexaedro con puntos y relleno de color
El icosaedro Poliedro de veinte caras, que son triángulos equiláteros,
compuesto por veintidós puntos coordenados y ordenados. P1= (X , Y ) 1 1
punto inicial de la figura, 0º θ 360º ángulo de rotación, L = a cm. +Lados del polígono con L Є R , ω = 90º
< <
Con los datos propuestos, encuentran los puntos restantes:
X = LCOS(q + 2w + w’) + X Y = LSEN(q + ) + Y2 1 2 12w + w’
X = LCOS(q + ) + X Y = LSEN(q ) + Y4 3 4 32w + w’ + 2w + w’
X = LCOS( ) + X Y = LSEN( ) + Y6 5 6 5q + 2w + w’ q + + 2w + w’
X = LCOS( ) + X Y = LSEN( ) + Y7 6 7 6q + w’ q + w’
X = LCOS( ) + X Y = LSEN( ) + Y8 7 8 7q + 2w + w’ q + 2w + w’
X = LCOS( ) + X Y = LSEN( ) + Y9 8 9 8q + w’ q + w’
X = LCOS( ) + X Y = LSEN( ) + Y3 2 3 2q + w’ q + w’
X = LCOS( ) + X Y = LSEN( ) + Y5 4 5 4q + w’ q + w’
Figuras Geométricas VIFiguras Geométricas VI
6666

Icosaedro con puntos
P17P19P21
P20P22 P18 P16
P15
P14 P12
P11
P10
P9P7
P5P3P1
P2P4 P6 P8
X = LCOS( ) + X Y = LSEN( ) + Y14 13 14 13q + 2w q + 2w
X = LCOS( ) + X Y = LSEN( ) + Y16 15 16 15q + 2w q + 2w
X = LCOS( ) + X Y = LSEN( ) + Y20 19 20 19q + 2w q + 2w
X = LCOS( ) + X Y = LSEN( ) + Y22 21 22 21q + 2w q + 2w
X = LCOS( ) + X Y = LSEN( ) + Y18 17 18 17q + 2w q + 2w
X = LCOS( ) + X Y = LSEN( ) + Y10 9 10 9q + 2w + w’ q + 2w + w’
X = LCOS( ) + X Y = LSEN( ) + Y11 10 11 10q + w’ q + w’
X = LCOS( ) + X Y = LSEN( ) + Y12 11 12 11q + w’ q + w’
X = LCOS( ) + X Y = LSEN( ) + Y13 12 13 12q + w q + w
X = LCOS( ) + X Y = LSEN( ) + Y17 16 17 16q + w q + w
X = LCOS( ) + X Y = LSEN( ) + Y19 18 19 18q + w q + w
X = LCOS( ) + X Y = LSEN( ) + Y21 20 21 20q + w q + w
X = LCOS( ) + X Y = LSEN( ) + Y15 14 15 14q + w q + w
Figuras Geométricas VIFiguras Geométricas VI
6767

Aunque no aparecen todos los poliedros regulares se debe tener en
cuenta que sus fórmulas hacen parte del método DABEJA y la invitación
para el lector es a continuar su estudio de la figura con la que desee
experimentar, pues en estos momentos debe haber aplicado y
comprendido la esencia del método con criterios propios.
El método DABEJA presenta el siguiente impacto para quien lo
estudie y aplique reconociendo las diversas propiedades de los
movimientos en las figuras, interna y externamente aportando a la
visualización de las mismas desde la bi-dimensionalidad puntos
coordenados y ordenados.
v Aplicar un método diferente para construir polígonos regulares y
figuras planas sin emplear el compás.
v Sintetizar el lenguaje representacional de la geometría a través de
expresiones algebraicas. Identificar características específicas de
los polígonos regulares y figuras planas apoyados con
demostraciones y generalizaciones.
v Relacionar movimientos de traslación, rotación y reflexión con el
método DABEJA.
v Uso y control de las variables para construir las figuras en el plano
cartesiano.
v Relacionar estudios de las funciones con movimientos
ondulatorios.
v Relacionar movimientos de traslación, rotación y reflexión con el
método DABEJA.
v Potencializar al docente en el manejo de procesos matemáticos que
involucran a la geometría, los números reales, la destreza de medir
y la resolución de variables matemáticas

REFERENCIAS BIBLIOGRÁFICAS
APOSTOL. Cálculo 2ª ed. Editorial Reverte, 1980.
LEITHOLD, Louis. Cálculo México: Oxford, 1999. Mx. 7ª edición.
GIL PÉREZ, Daniel. La enseñanza de las ciencias y la matemática,
Ozamiz. Ed. Popular España, 2001.
JOHNSON/LENDSEY/SLESNICK. Matemática Moderna Algebra,
FEI S.A. Buenos Aires. 1972.
LINEAMIENTOS CURRICULARES. “Matemáticas”. M.E.N. ed.
Magisterio, Colombia, 1998.
LINEAMIENTOS CURRICULARES “Nuevas tecnologías y currículo
de matemáticas” M.E.N. ed. Magisterio Bogotá D.C. 1998
MAZA GÓMEZ, Carlos. Matemáticas en la antigüedad. Sevilla, España
2002. www.personal.us.es/cmaza/portada.html.
MEDINA GALLEGO, Carlos. La enseñanza problémica. Rodríguez
Auto editores, España, 1999.
PEÑA, Miguel. Historia de la geometría Euclidiana. Los orígenes de la
geometría, Revista Candidus, Año 1, No. 10 junio/julio, 2000.
P L A N O C A R T E S I A N O , Á L G E B R A 5 . T I N T A S .
www.edilatex.com/index-archivos/algebra5tintas.pdf.
RAHT GEO ALG Traslaciones, rotaciones y reflexiones, 07-2000.
w w w . c a m p u s - v i r t u a l . u p r r p . e d u / c a m p u s -
virtual2/cursos/Geovectplana/PDFS/Avgo7.pdf
SOLER MARTÍ, Miquel Albert. Didáctica multisensorial de las
ciencias. Paidós, Barcelona, 1999.
SEMINARIO DE HISTORIA DE LA MATEMÁTICA. El trabajo de
Gauss sobre la teoría de las paralelas. Víctor S. Albis González y René
Álvarez, Universidad Nacional de Colombia, Universidad de Sucre.
1975. Josep Rochera. Gaga, Taller de talentos Matemáticos. Zaragoza,
marzo, 2006. www.unizar.es/ttm/2005-06/constrgeoml.pdf


paraISBN: 978-958-44-2589-8
DEPARTAMENTO DEL METASECRETARÍA DE EDUCACIÓN
Top Related