Transformarea z - Infoelectronica · transformata sa bilaterala exista in tot planul, cu exceptia...
21
1 Transformarea z {} [] [] [] 0 2 2 0 0 0 0 0 Raspunsul unui sistem discret liniar si invariant in timp la exponentiala complexa discreta de modul neunitar ; ; si ; j j n n n n nk n k k z x jy re x,y R z r x y arg z z r e yn hn z hk z z h Ω ∞ Ω − =−∞ =−∞ = + = ∈ = = + Ω= = ⋅ = ∗ = ⋅ = ⋅ ∑ [] () [] [] ( ) [] [] ( ) 0 0 0 ; k k n k n n k k k k k k k k z H z hk z yn z H z xn cz yn cH z z. ∞ − ∞ − =−∞ ⋅ = ⋅ = ⋅ = ⇒ = ∑ ∑ ∑ ∑ Transformarea z bilaterala [] { } () () [] [] { } () [] ( ) [] { } ( ) [] { } ( ) [] { } ( ) () [] [] [] 1 0 0 1 n j n n j n n n j n j n n n n n xn z X z xn z z re r . xn z xn r e r xn r . z r , xn e xn . X z r xn e r xn r xn l. ∞ − Ω =−∞ ∞ − −Ω − =−∞ Ω ∞ ∞ − −Ω − =−∞ =−∞ − = = ⋅ = ⋅ ≥ = ⋅ ⋅ = ⋅ Ω ≥ = = = Ω ≤ ⋅ = <∞ ∈ ∑ ∑ ∑ ∑ Z ; , Z F ; Z F
Transcript of Transformarea z - Infoelectronica · transformata sa bilaterala exista in tot planul, cu exceptia...
-
1
Transformarea z
{ }
[ ] [ ] [ ]0
2 2
0 0 0 0 0
Raspunsul unui sistem discret liniar si invariant in timp la exponentiala complexa discreta de modul neunitar
; ; si
;
j
j nn n n n k n
k k
z x jy re x, y R z r x y arg z
z r e y n h n z h k z z h
Ω
∞Ω −
=−∞ =−∞
= + = ∈ = = + Ω =
= ⋅ = ∗ = ⋅ = ⋅ ∑ [ ]
( ) [ ] [ ] ( )
[ ] [ ] ( )
0
0 0 ;
k
k n
kn n
k k k k kk k
k z
H z h k z y n z H z
x n c z y n c H z z .
∞−
∞−
=−∞
⋅
= ⋅ = ⋅
= ⇒ =
∑
∑
∑ ∑
Transformarea z bilaterala
[ ]{ }( ) ( ) [ ]
[ ]{ }( ) [ ]( ) [ ]{ }( )[ ]{ }( ) [ ]{ }( )
( ) [ ] [ ]
[ ] 1
0
0
1
n j
n
n j n n
nj
n j n n
n nn
x n z X z x n z z r e r .
x n z x n r e r x n r .
z r , x n e x n .
X z r x n e r x n
r x n l .
∞− Ω
=−∞∞
− − Ω −
=−∞Ω
∞ ∞− − Ω −
=−∞ =−∞−
= = ⋅ = ⋅ ≥
= ⋅ ⋅ = ⋅ Ω ≥
= = = Ω
≤ ⋅ = < ∞
∈
∑
∑
∑ ∑
Z ; ,
Z F ;
Z F
-
2
Exemple
[ ] [ ]
( ) ( )( )
( )
1
0 0
11
1 1
111
11
n
nn n
n n
j
. x n a n a .
X z a z az
az X z z a .az
X .ae
∞ ∞− −
= =
−−
− Ω
= σ <
= +
< ⇒ = >−
Ω =−
∑ ∑
,
Daca ,
[ ] [ ]
( ) ( )
( )
1 11
11
1 10
1 11
1
2 1
1
1 1
1 1111
11
n
nnn n
n n nn
n
. x n a n
X z a z azaz
az a z
X za z az
az
; a .az
− − ∞− −
−=−∞ =−∞ =
∞
− −=
− −−
−
= − σ − −
⎛ ⎞= − = − = − =⎜ ⎟⎝ ⎠
⎛ ⎞= − ⎜ ⎟⋅⎝ ⎠
< = − =⎛ ⎞−⎜ ⎟⎝ ⎠
= <−
∑ ∑ ∑
∑
Daca atunci
z
-
3
Proprietatile domeniului de convergenta al transformarii z
bilaterale
[ ] ( )
[ ]
a.convergent de domeniuldin sunt infinit, la de punctului a eventual exceptiacu zplan din punctele toateatunci ,bilaterale z
atei transformal aconvergent de domeniuldin este cercul daca si dreapta spre infinita intinderecu semnalun este Daca 3
si/sau 0punctelor a evenual exceptiacu planul,in tot exista bilaterala sa tatransforma
finita, durata de suportulcu semnalun este Daca 2.acesteia. al polun nici contine
poatenu bilateralezateitransformalaconvergent de Domeniul 1.
0
0
,r
rznx.
.zz
,zXnx
>
=
∞==
[ ]
[ ]
.rz
rznx
,rz,rz
nx
0
0
0
0
cercul include ce circulara coroana o este acesta atunci,bilaterale z teitransforma
al aconvergent de domeniulin inclus este cercul daca si dreapta la sicat stanga laatat infinita intinderecu semnalun este Daca 5.
a.convergent de domeniuldin sunt originedin punctului a eventual exceptiacu plan din punctele toateatunci bilaterale z
atei transformal aconvergent de domeniulin inclus este cercul daca si stanga spre infinita intinderecu semnalun este Daca 4.
=
=
≤
=
-
4
Exemplu[ ] [ ] [ ][ ] [ ] [ ] [ ] [ ]
[ ]
[ ] [ ]
( ).
aza
azaz
za
aa
.a
zz
a
na
na
.azaz
na
.nxnxnxnanxnanxaanx.
n
nn
n
n
nn
1 ; 1
1
1 , 11
1
111
; 1
1 , 1
, , 10 , 3
2
1
1
212
1
−
→σ
+=−−σ=σ=
-
5
Definirea transformatei z bilaterale prin constelatia de poli
si zerouri( )
( )( )( )
( )
( ).kz
zX.k
zXzz
.DCzzz
zzkzX
zX
k
pk
N
kpk
M
kk
constanta si determina poate se DC,din punctanumit un -intr valoareasi plus
in cunoaste se Daca constantei exceptiacu cunoaste apentru zerourilor
a si polilor acunoastere suficienta Este
;
:rationala fractie o este Daca
0
0
0
1
10
∈−
−=
∏
∏
=
=
Exemplu
( ) [ ]
[ ]
( )
( )
( ) ( ) ( ) ;
radianiin cerc de arcului lungimea unghiul laplasat unitar, cercul pe deA punctul Fie
5011
50:discret in timpFourier
ata transformsi are semnalul DC interiorulin esteunitar
cercul Deoarece 50 dedefinit este DC atunci cauzal
este semnalul Daca 501
150
1Pentru
50si0cu figuradin zerouri si poli deaconstelati Fie
1
0
.XargAP
OAX
.
e,,eeΩX
nx
.,zz
nx.z,,z
zzX:k
.,zz
____
____
jj
j
p
p
ϕ−ψ=Ω=ΩΦ=Ω
Ω−
=−
=
=>−
=−
==
==
Ω−Ω
Ω
−
-
6
( ) ( )
ric.trigonometcel fiind sensul A, punctulin pana si 0 xsemiaxa
cu acestuia aintersecti la deunitar, cercul pe radiani,in masurat cerc de arcului lungimea reprezinta Frecventa
;
:atunci ,orizontala axacu si vectoriiformeaza le care pe unghiurile si cu si
zerourilesipoliicu sicu notand general,cazulIn
1 1
1
10
0
0
>
Ω
ϕ−ψ+=ΩΦ=
ϕψ
∑ ∑
∏
∏
= =
=
= M
k
N
kkkN
k
______
pk
M
k
______
k
k
pkkk
kpk
.kargAz
AzkzX
AzAz
zz
Transformata z unilaterala
[ ]{ }( ) ( ) [ ]
nule.initialeconditiiau nu careconstanti icoeficientcu si liniare finite diferentecu ecuatii de atecaracteriz
cauzale sistemelor studiulpentru indicata este aunilateral z taTransforma origine.in centrulcu disc unui exteriorul fie
planul tot fie este eunilateral atei transformal aconvergent de domeniul aceea De cauzal. semnal unui a bilaterala z
ata transformsi ca privita fi poate aunilateral z taTransforma0
.znxzXznxZ nn
uu−∞
=∑==
-
7
Proprietatile transformarii z
[ ] ( ) [ ] ( ) [ ] ( ) [ ] ( )
[ ] [ ] ( ) ( )[ ] [ ] ( ) ( )
[ ] ( )
[ ]{ } [ ] ( ) [ ]
[ ]{ } [ ] [ ] [ ] [ ]
[ ] ( ) [ ] ⎟⎠⎞⎜
⎝⎛ −↔−
⎟⎠⎞⎜
⎝⎛ +==−=−
>∞=
==−=−
∈↔−
+↔+
∈+↔+
↔∈↔↔∈↔
∑
∑ ∑∑∑
∑ ∑∑
−
−=
−−
∞
=
−
−=
−−−−−∞
−=
∞
=
=−−
−∞
−∞=
∞
−∞=
−+−=−∞
−∞=
−
−
1
0
0
1
000
0
00
00
0
0
0
0
00
0
0
000
0
,
0pentru e,unilateral arii transformcazulIn DC.din elimina se , 0 dacaiar DCdin elimina se 0z 0 Daca
:D
, in timp Translatia 2.
putin cel , ; eLiniaritat 1
; , ; ,
:Notatii
nn
nu
n
m nm
mmnnm
nmn
mnnn
u
m
m m
nnmmnn
n
n
n
uu
yx
u
Z
y
Z
u
Z
x
Z
znxzXznnx
zmxzmxzzzmxznnxnnxZ
:nzn,n
zmxzzznnxnnxZ
.DCzzXznnx
zbYzaXnbynaxDCDCzzbYzaXnbynax
..zYnyDCzzYnyzXnxDCzzXnx
uu
∩
[ ] ( )[ ]{ } [ ] [ ]( ) [ ] ( )
[ ] [ ]
[ ] ( )
[ ]{ } [ ] [ ]
[ ] [ ] ( ) ( )[ ] [ ] ( ) ( ) [ ].xzXznxnx
DCzzXznxnxn
.z
Xz
mxznxnxZ
.DCz
zXnx
.zzXnxz
zz
zzXnxz
.zeXnxe,zenxznxenxeZ
.DCzzeXnxe
u
n m
mnmn
unn
ju
njnj
n
n
n
njnj
jnj
111; ; 11
domeniulin reaDiferentie 5.
11 D.
1 ,
semnalului aReflectare 4.
DC;
:general Mai
D.
, in timp Modularea 3.
1
1
1
00
000
00000
00
−−−↔−−∈−↔−−
⎟⎠⎞
⎜⎝⎛=⎟
⎠⎞
⎜⎝⎛=−=−
∈↔−
⎟⎟⎠
⎞⎜⎜⎝
⎛↔∈⎟⎟
⎠
⎞⎜⎜⎝
⎛↔
↔==
∈↔
−
−
∞
−∞=
∞
−∞=
−−=−
−
Ω−Ω−Ω−∞
−∞=
−∞
−∞=
ΩΩ
Ω−Ω
∑ ∑
∑∑
-
8
[ ] ( ) ( ) { }[ ] [ ] [ ] [ ] [ ] ( ) ( ) ( )
( ) ( )
[ ]( ) [ ]
[ ] [ ] [ ] ( ) ( ) ( ) [ ] [ ] [ ]
[ ] ( )
[ ] ( ).dz
zdXznnx
zdz
zdXznnx
z
.kxy,yzYzzXnynynx
.zz
kxzXkx
.zXz
zY
;zYzzXnynynxkxny
.zzzzXz
zzzXkx
n
u
ku
kun
k
m
k
n
k
−↔
∈−↔
=−−−−=↔−−=
>−
+↔
−=
−=↔−−=⇒=
>=∈−
=−
↔
∑
∑∑
∑
∑
−
−∞=
−
−
−
−∞=
−∞=
−
−
−∞=
−−∞=
DC. ;
domeniulin reaDiferentie 7.
1 111 D.
1 ; 1
11
11 Fie D.
1DC ;DCDC ; 11
domeniulin Insumarea 6.
11
1
1
1
1
**1 ∩
[ ] ( )[ ] ( )
[ ]{ } [ ] [ ]( )( ) ( )
[ ] [ ][ ] [ ] ( ) ( )[ ] [ ] ( ) ( )
[ ] [ ]{ } [ ] [ ]( ) [ ] [ ] ( )
[ ] [ ] ( ) ( )
[ ] [ ] ( )
{ } { }
{ }[ ] [ ] ( ) DC. ,
21
DC inmultirePrin
si DC ; DC
DC. , 21
timpdomeniulin semnalelor produsului Teorema 10.
D.
putin. cel DCDC
timpdomeniulin iconvolutie Teorema 9.
; D.
DC. , 8.
∈Γ⎟⎠⎞
⎜⎝⎛
π↔
⋅
-
9
[ ] [ ]{ } [ ] [ ] ( ) [ ]
( ) [ ] ( )
[ ] [ ] [ ] [ ] ( )
[ ] ( )
[ ] ( ) ( )
( ) ( ) ΩΩπ
=Ωπ
=
=Ωπ
=
Ω==⇒=
⎟⎠
⎞⎜⎝
⎛π
=⇒
⇒⎟⎠
⎞⎜⎝
⎛π
↔⇒=∈
⎟⎠⎞
⎜⎝⎛
π=⎥
⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛
π=
=⎟⎠
⎞⎜⎝
⎛π
==
∫∫
∫∑
∫∑
∫
∫∑∫
∑ ∫∑
∞
∞−
∞
∞−
Ω
Ω
ΩΩπ
π−
Ω∞
∞=
ΩΩ−Ω
Γ−∞
−∞=
Γ
Γ
−∞
−∞=Γ
−∞
−∞=
−Γ
−∞
−∞=
dXdeX
edejeXeX
jnx
djedueueu
.udu
uzXuX
jznx
udu
uzXuX
jnxnxny.lnx
.udu
uzYuX
judu
uznyuX
j
znyduuuXj
znynxnynxZ
j
j
jj*j
jj*j
*
**n
n
*
***
n
n
n
n
nn
n
22
2
-n
2
22
1
21
21
21
si si Daca
21
21
izari.Particular
21
21
21 D.
[ ] ( ) ( )
( ) ( ) [ ] [ ] [ ]
[ ] ( ) ( ) ( ) ( )
[ ] [ ]( ) [ ] ( ) [ ] ( ) ( )
[ ] [ ]( ) ( ) ( ) ( ) [ ]
[ ] [ ]( ) ( ) ( ) [ ][ ] [ ] ( ) ( ) [ ] [ ] ( ) ( ).zXzxxzXzxx
,xzXzznxnx
z
.zxzXzzXxzmxz
zXzmxzXznxznxnx
.zXzzXzx
...xz
xznxzXzX
.zXzXx
uzuz
uz
n
nz
uum
m
um
mmn
n nu
nn
zuz
n
nu
zuz
1lim 01lim0 :sau
01lim1lim
:obtine se 1pentru limita la Trecand
010
11 D.
1lim1limcauzaldiscret semnal unui a finale valoriiTeorema 12.
enunt.din relatia obtine se limita la Trecand
110 D.
limlim0cauzaldiscret semnalaunuiinitiale valoriiTeorema 11.
11
101
0
1
11
0 0
11
0
−=∞⇔−−=−∞
−−=−+
→
−−=−−=
=−=−+=−+
−=−=∞
++===
==
→→
→
−∞
=→
−∞
=
∞
=
−−=+∞
=
∞
=
−−
→→
−∞
=
∞→∞→
∑
∑
∑∑ ∑
∑
-
10
Relatia dintre transformata z si transformata Laplace
( ) ( ) ( ) ( ) ( )
( ){ } ( ) ( ){ } ( )
( ) [ ] [ ]{ } [ ] ( )
( ) ( ){ } [ ]{ }( ) ( ){ } [ ]{ }.nxZttx
.nxZttx
znTxznxnxZnxnTx
.enTxnTtnTxtx̂
nTtnTxtx̂sXtx
duzeTa
dzeTa
n
nea
n
ndddea
n
snTeae
nea
neeaaa
esTe
esTe
e
=δ
=δ
==⇒=
=−δ=⇒
⇒−δ=↔
=
=
−∞
−∞=
−∞
−∞=
∞
−∞=
−∞
−∞=
∞
−∞=
∑∑
∑∑
∑
uL
L
LL
obtine se eesantionar Prin
Studiul sistemelor discrete liniaresi invariante in timp prin
intermediul transformarii z
Forma simpla a teoremei convolutiei semnalelordiscrete face din transformata Z un instrument util pentru studiul sistemelor discrete LIT. Daca sistemul studiat este cauzal si nu are conditii initiale nule, este utila transformareaZ unilaterala.
-
11
Functia de sistem a unui sistemdiscret, liniar si invariant in timp
Functia H(z), numita "functia (de) sistem" sau"functia de transfer a sistemului" caracterizeazacomplet comportarea sa în planul complex z, dupa cum raspunsul la impuls h[n] caracterizacomplet comportarea sistemelor in timp.
Daca sistemul discret este stabil, exista si transformataFourier in timp discret a lui h[n] si prin urmare cerculunitar este in domeniul de convergenta al functiei de sistem ce caracterizeaza un sistem stabil.
Daca sistemul este cauzal: Hu(z) = H(z), atunci domeniulde convergenta al functiei este exteriorul unui disc.
Daca sistemul este stabil si cauzal, cercul unitar este in DC. Toti polii functiei sistem a unui sistem stabil si cauzal au modulul subunitar ceea ce este ehivalent cufaptul ca sunt cuprinsi în interiorul discului unitar.
-
12
Determinarea raspunsului unuisistem discret liniar si invariant întimp, utilizand transformarea Z
Daca x[n] este dat si se specifica h[n] ↔H(z) atuncise aplica semnalului de intrare transformareadirecta rezultand X(z). Raspunsul in complex este Y(z)=H(z)X(z).
Aplicand transformarea Z inversa, rezulta semnalulraspuns, y[n]. Daca se lucreaza cu sisteme si semnale cauzale în conditii initiale nenule, se va utiliza numai transformarea Z unilaterala.
Calculul transformarii z inverse
Sunt aplicabile trei metode:1. Calculul direct al integralei,2. Transformarea functiei Y(z) intr-o suma
de fractii simple,3. Metoda dezvoltarii functiei Y(z) in serie
de puteri.
-
13
2. Transformarea functiei Y(z)intr-o suma de fractii simple
Metoda se aplica in cazurile in care Y(z) este o functie rationala. Functia Y(z) poate fi un raport de polinoame în z-1 sau z. Recomandam sa se lucreze în z-1, notand
pentru comoditate z-1 = x, deoarece in majoritatea cazurilor tabelele sunt date înfunctie de puterile lui z-1.
( ) ( ) ( )( ) ( )( )( )
( ) [ ]( )( ) ( )
( ) ( )( )
( ) ( )( )( ) .xDxRxx
dxd
!isb
xDxRxxa
.xx
bxx
axDxR
knczcxcxI
.xDxRxI
xDxNzYxY
kk
k
k
m
k
xxs
kis
is
kki
xxmm
m k
s
i ik
ki
m
m
k kk
kk
k
kk
=−
−
=
=
−
−
⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡ −−
=
⎥⎦
⎤⎢⎣
⎡ −=
−+
−=
−δ↔==
+===
∑ ∑ ∑
∑ ∑∑
1
1
1
;
Se aplica transformarea inversa fiecarui termen din suma, dupa ce se revine mai intai la z-1 = x, utilizand tabelele de transformate si tabelele de proprietati ale transformarii.
-
14
Exemple( ) ( )( ) ( ) { }
( ) ( )( ) ( )( )( )
[ ] ( ) ( )[ ] [ ]( ) { }
[ ] ( ) ( )[ ] [ ]( ) { }
[ ] ( ) [ ] ( ) [ ].n,n,ny,z,zzY
.n,,ny
,zzzY.n,,ny
.z,z,zz
zY
xxxxx
zzzzY
.zzzY.z.z
zzY
nn
nn
nn
u
σ−−−σ−=
-
15
( ) ( ) { }( ) ( ) [ ] ( )
[ ] ( )
[ ] ( ) [ ]
( )
: lui ale negative puteriledecat continenu cauzal semnalului ata transformdeoarece in catului forma urmarind impartirea efectueaza Se
, 1
1 d)
11
consecintain si 01lim0 da initiale valorii teoremacauzal, fiind Semnalul
1 ; 11
DC , 1 c)
1
1
1
1
1
1
1
zz
.azaz
zY
.nan
ny
azlny
.nn
anyzn
azY
.azzazlnzY
nn
z
nnn
n
nn
−
−
−
∞→
+−∞
=
+
−
>−
=
−σ−=
=+=
≥−=↔−=
>=+=
∑
[ ] [ ].nany nσ= :deci obtine Se
( )
( ) :forma sub impartirea efectueaza se si scrie
se aceea De . lui ale pozitive puterile numai contine sa taTransforma .anticauzal
estetor corespunza semnalul ,pentru definita este 1
1 Daca 1
azzzY
z
azaz
zY
−=
<−
= −
( ) ( )[ ] [ ].nany
zazazYn
m n
nnmnm
1 este
semnalului forma consecintain si :ca Rezulta1
11
−−σ−=
−=−= ∑ ∑∞
=
−
−∞=
−−=
−
-
16
Sisteme discrete liniare si invariante in timp, caracterizate
prin ecuatii cu diferente finiteliniare si cu coeficienti constanti
[ ] [ ]
( ) ( ) ( ) ( )( ) ( )
( ) ( )
[ ] ( ) ( )( )i.numitorulu graduldecat egalsau mic mai fie sa trebuieluinumaratoru gradul
limlim0 :initiale valorii teoremeiconform caz,acest In unitar. cercului
interiorulin gasesc se sai polii toticauzal si stabil este sistemul Daca .sistemului polii numesc se 0 ecuatiei radacinile ,sistemului zerourile numesc se 0 ecuatiei Radacinile
sau in rationala fractie o este ,
:rezulta bilaterala z ata transformegalitatii Aplicand 0 ,
1
0
0
00
0 00
⇒==
==
===
≠−=−
∞→∞→
−
=
−=
−
=
−
=
−
= =
∑
∑∑∑
∑ ∑
zDzNzHh
zDzN
.zzzH.zDzN
za
zbzHzXzbzYza
aknxbknya
zz
M
k
kk
N
k
kkM
k
kk
N
k
kk
N
k
M
kkk
Contributia polilor unui sistemdiscret cauzal in raspunsul la
impuls al acestuia
( )
[ ]
( )
[ ]( )
oscilator.-limita la eStabilitat ).excitatiei disparitia dupa si(chiar fixa eamplitudin de oscilatie ,
:forma de este lalor aContributi unitar, cercul pe situati simpli poli :aparte Cazinstabil.-sistem l,exponentia creste raspunsul ,1 Daca
.sistemului ateinstabilit conferanu poli de perechea a,amortizeaz se raspunsul 1 Daca
forma de este in lor acontributiiar 11
:sunt simple fractiiin lui readescompunein toricorespunza Termenii si conjugati;complex simpli poli de Perechi 1.
identic. modin se-tratanducazuri celelalte dubli,sisimplipolilor cazul numai considera Vom
11
pp
p
p
np
jp
*
jp
jp
*p
jpp
nsinAnh
r
,r.nsinA
nh...zer
azer
a...
zHerzerz
pp
pp
Φ+Ω
>
<
Φ+Ω
+−
+−
+
==
−Ω−−Ω
Ω−Ω
-
17
( ) ( )
( ) ( )[ ] [ ]
instabil. sistem-in timp creste raspunsul ,1 Daca
stabil. sistem-amortizat este raspunsul ,1 Daca
:forma de este impuls la raspunsulin lor aContributi1111
...
:forma de este transfer de functia lalor aContributi
dublii, polisunt si conjugati,complex dublii Poli 2.
21
21
221
21
11
1
>
<
σΦ+Ω+Φ+Ω
+−
+−
+−
+−
+
==
−Ω−−Ω−Ω−−Ω
Ω−Ω
p
p
ppnppp
np
jp
*
jp
jp
*
jp
jp
*p
jpp
r
r.nnsinnrAnsinrA
...zer
a
zer
azer
azer
a
erzerz
pppp
pp
Calculul raspunsului unui SLIT discret caracterizat printr-o
ecuatie cu diferente finite
[ ] [ ]
[ ]{ } [ ]{ }
( ) [ ][ ] ( ) [ ][ ][ ]
( ) [ ][ ] ( )[ ]( ) ( ) [ ].nyzYzX
.zXzbznyzYza
nx
.znxzXzbznyzYza
knxZbknyZa
Z
,aknxbknya
uu
M
ku
kk
N
k
k
n
nu
kk
M
k
k
n
nu
kk
N
k
k
n
nu
kk
M
kuk
N
kuk
u
M
kk
N
kk
apoi si determina se initiale, conditiile si Cunoscand
:devine ecuatia si 0,npentru 0 cauzal, este intrare de semnalul Daca
:tetransforma
acesteiilor proprietat baza pe sau,
:obtine se , a,unilateral Zata transformmembri ambiiin Aplicand
nenule. initiale conditiicu 0 ,
:finitediferentecu ecuatiadeat caracteriznecauzal, SLIT considera Se
00 1
0 10 1
00
000
∑∑ ∑
∑ ∑∑ ∑
∑∑
∑∑
=
−
= =
−
= =
−
= =
−
==
==
=−+
>=−
−+=−+
−=−
≠−=−
-
18
[ ] [ ] [ ] [ ] [ ] [ ]( ) ( ) [ ]( )
( ) ( )( )[ ]
[ ]
[ ] [ ]( )
[ ] .zanea
keea
kayany
.az
ayazea
kazeea
keaz
ayazze
kzY
.zze
kzyzYazzY
,ynkenxnxnayny
j
nj
j
nn
jjj
j
ju
juu
nj
1 , 1 ; 1
11
11
11
11
11
1 ; 1
1
01 , , 1Exemplu
0
0
0
000
0
0
0
0
111
111
111
11
>−
=−+−
≠−σ==−−
Ω
+Ω
Ω
++
−−Ω−ΩΩ
Ω
−−−Ω
−Ω−
Ω
Sisteme de ordinul I[ ] [ ] [ ] ( ) DC. ;
11 1 ∈−
=−
=⇒=−− − zazkz
azkzHnkxnayny
[ ] [ ] ( ) ( ) ( )
sus. cefiltru tre pentru rezulta maximul ,01 Dacajos. cefiltru tre 0 minim,
pentru frecventain iraspunsulu maximul 10 Daca
1
,a,
PA,a
.ePA
ePA
OAH.nkanh
____
j____
j____
____
n
π=Ω
-
19
Sisteme de ordinul doi[ ] [ ] [ ] [ ] ( )
.aaa
z
azazkz
zazakzHnkxnyanyany
,p 24
polii si originein 2 ordinul de zeroun Avem
1 21
2211
21
212
2
22
11
21
−+−=
++=
++=⇒=−+−+ −−
.aaaaaa
.aaaaa-
aaa
aaaaaa
aa
aa
.ezaa jp ,
1 ; 1 ; 04:rezulta iinegalitat de sistemul Rezolvand
04 ; 242
:realisunt polii dacasau 4
, 1
4 ; 124
ea.stabilitat obtine apentru si iicoeficientscaindeplinea le sa trebuiecare pe conditiile
cauta se si cauzal sistemul considera Se reali.sunt polii 4 Daca
conjugaticomplex sunt poli doi cei 4 Daca
1212221
2212
211
21
22
2212
212
21
21
221
221 21
−>−−>≥−
≥−
-
20
Functia de sistem echivalenta unorsisteme discrete conectate in serie
si in paralel
[ ] [ ] [ ]( ) ( ) ( ).zHzHzH
nhnhnh
e
e
21
21 ; +=
+=[ ] [ ] [ ]( ) ( ) ( ).zHzHzH
nhnhnh
e
e
21
21 ; =
∗=
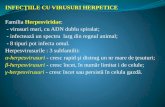
Forme de implementare ale filtrelor numerice utilizand
transformarea Z
Forma specifica de reprezentare a implementarii in forma directa I. S-a considerat a0 = 1.
-
21
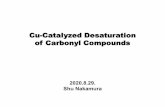
Forma specifica de reprezentare a implementarii in forma directa II. S-a considerat a0 = 1 .
Forma laticiala a unui filtru avandnumai poli
/ColorImageDict > /JPEG2000ColorACSImageDict > /JPEG2000ColorImageDict > /AntiAliasGrayImages false /DownsampleGrayImages true /GrayImageDownsampleType /Bicubic /GrayImageResolution 300 /GrayImageDepth -1 /GrayImageDownsampleThreshold 1.50000 /EncodeGrayImages true /GrayImageFilter /DCTEncode /AutoFilterGrayImages true /GrayImageAutoFilterStrategy /JPEG /GrayACSImageDict > /GrayImageDict > /JPEG2000GrayACSImageDict > /JPEG2000GrayImageDict > /AntiAliasMonoImages false /DownsampleMonoImages true /MonoImageDownsampleType /Bicubic /MonoImageResolution 1200 /MonoImageDepth -1 /MonoImageDownsampleThreshold 1.50000 /EncodeMonoImages true /MonoImageFilter /CCITTFaxEncode /MonoImageDict > /AllowPSXObjects false /PDFX1aCheck false /PDFX3Check false /PDFXCompliantPDFOnly false /PDFXNoTrimBoxError true /PDFXTrimBoxToMediaBoxOffset [ 0.00000 0.00000 0.00000 0.00000 ] /PDFXSetBleedBoxToMediaBox true /PDFXBleedBoxToTrimBoxOffset [ 0.00000 0.00000 0.00000 0.00000 ] /PDFXOutputIntentProfile () /PDFXOutputCondition () /PDFXRegistryName (http://www.color.org) /PDFXTrapped /Unknown
/Description >>> setdistillerparams> setpagedevice