TEMA 2 MODELOS DE ATMOSFERA Y DE AVI´ ON´aero.us.es/sesteban/MV/Files/MV_Tema2.pdf · donde M es...
12
TEMA 2 MODELOS DE ATM ´ OSFERA Y DE AVI ´ ON En este tema se van a modelar las fuerzas aerodin´ amica y propulsiva, as´ ı como el consumo de combustible del avi´ on, esto es, se van a definir las funciones L = L(h,V,α), D = D(h,V,α), T = T (h,V,π)y c = c(h,V,π) para el caso de vuelo sim´ etrico. Estas funciones dependen de la altitud a trav´ es de la densidad, la temperatura y la presi´ on del aire, por lo que resulta necesario disponer tambi´ en de un modelo de atm´ osfera que defina dicha dependencia. 2.1 Modelo de atm´osfera El modelo de atm´ osfera proporciona la temperatura, la presi´ on y la densidad del aire en funci´ on de la altitud. En este curso se considera el modelo de atm´ osfera est´ andar internacional, modelo ISA (Internacional Standard Atmosphere), ya estudiado en otros cursos. Se resumen a continuaci´ on las funciones mencionadas, basadas en la hip´ otesis de considerar el aire como un gas perfecto. 1) En la troposfera, esto es, para 0 <h<h 11 , siendo h 11 =11000 m la altitud de la tropopausa, se tiene Θ = Θ 0 - α T h p = p 0 ( 1 - α T h Θ 0 ) g Raα T ρ = ρ 0 ( 1 - α T h Θ 0 ) g R a α T −1 (2.1) donde los valores al nivel del mar son Θ 0 =288.15 K, p 0 =1.01325 10 5 N/m 2 y ρ 0 =1.225 kg/m 3 , α T =6.5 10 −3 K/m y R a =287.05 J/(kgK) es la constante del aire. Adem´ as g =9.80665 m/s 2 . 2) En la estratosfera (en la parte baja de la misma), para h>h 11 , se tiene Θ = Θ 11 p = p 11 exp ( - g(h - h 11 ) R a Θ 11 ) ρ = ρ 11 exp ( - g(h - h 11 ) R a Θ 11 ) (2.2) donde los valores en la tropopausa son Θ 11 =216.65 K, p 11 =0.22632 10 5 N/m 2 y ρ 11 =0.3639 kg/m 3 . 2.2 Modelo aerodin´ amico Los coeficientes de sustentaci´ on (C L ) y de resistencia (C D ) se definen a partir de las expresiones L = 1 2 ρ(h)V 2 SC L D = 1 2 ρ(h)V 2 SC D (2.3) siendo S la superficie alar del avi´ on. Mediante an´ alisis dimensional se obtiene la siguiente dependencia funcional C L = C L (α, M, Re) C D = C D (α, M, Re) (2.4) 19
Transcript of TEMA 2 MODELOS DE ATMOSFERA Y DE AVI´ ON´aero.us.es/sesteban/MV/Files/MV_Tema2.pdf · donde M es...

TEMA 2 MODELOS DE ATMOSFERA Y DE AVION
En este tema se van a modelar las fuerzas aerodinamica y propulsiva, ası como el consumo decombustible del avion, esto es, se van a definir las funciones L = L(h, V, α), D = D(h, V, α), T =T (h, V, π) y c = c(h, V, π) para el caso de vuelo simetrico. Estas funciones dependen de la altituda traves de la densidad, la temperatura y la presion del aire, por lo que resulta necesario disponertambien de un modelo de atmosfera que defina dicha dependencia.
2.1 Modelo de atmosfera
El modelo de atmosfera proporciona la temperatura, la presion y la densidad del aire en funcionde la altitud. En este curso se considera el modelo de atmosfera estandar internacional, modelo ISA(Internacional Standard Atmosphere), ya estudiado en otros cursos. Se resumen a continuacion lasfunciones mencionadas, basadas en la hipotesis de considerar el aire como un gas perfecto.
1) En la troposfera, esto es, para 0 < h < h11, siendo h11=11000 m la altitud de la tropopausa, setiene
Θ = Θ0 − αT h
p = p0
(1 − αT h
Θ0
) g
RaαT
ρ = ρ0
(1 − αT h
Θ0
) g
RaαT−1
(2.1)
donde los valores al nivel del mar son Θ0=288.15 K, p0=1.01325 105 N/m2 y ρ0=1.225 kg/m3,αT =6.5 10−3 K/m y Ra=287.05 J/(kgK) es la constante del aire. Ademas g =9.80665 m/s2.
2) En la estratosfera (en la parte baja de la misma), para h > h11, se tiene
Θ = Θ11
p = p11 exp(−g(h − h11)
RaΘ11
)ρ = ρ11 exp
(−g(h − h11)
RaΘ11
) (2.2)
donde los valores en la tropopausa son Θ11=216.65 K, p11=0.22632 105 N/m2 y ρ11=0.3639 kg/m3.
2.2 Modelo aerodinamico
Los coeficientes de sustentacion (CL) y de resistencia (CD) se definen a partir de las expresiones
L =12ρ(h)V 2SCL
D =12ρ(h)V 2SCD
(2.3)
siendo S la superficie alar del avion.Mediante analisis dimensional se obtiene la siguiente dependencia funcional
CL = CL(α,M,Re)
CD = CD(α,M,Re)(2.4)
19
donde M es el numero de Mach y Re el numero de Reynolds. Estos coeficientes se suponen funcionesconocidas, obtenidas en general mediante ensayos en tunel y ensayos en vuelo.
El numero de Mach es M = V/a, siendo a =√
κRaΘ(h) la velocidad del sonido (con κ=1.4 parael aire), que depende de la temperatura del aire, por lo que depende del modelo de atmosfera. Ladependencia con el numero de Mach puede despreciarse a bajas velocidades (M <0.6), mientras quees importante a altas velocidades, cuando son importantes los efectos de compresibilidad.
Para M y Re fijos, la variacion de CL con α es lineal para valores pequenos de α, y tiene un valormaximo CLmax
que corresponde al angulo de ataque de entrada en perdida (stall) αmax. En general elvuelo esta restringido a α < αmax, y en consecuencia CL < CLmax
.
A bajas velocidades CLmaxes constante (independiente de M) mientras que a altas velocidades, en
regimen subsonico alto (para aviones comerciales), disminuye al aumentar M , y disminuye drastica-mente al acercarse a M = 1. Mas alla de la entrada en perdida CL depende fuertemente de Re. CLmax
influye de forma muy importante en la definicion de la envolvente de vuelo (flight envelope) del avion.
El coeficiente de resistencia puede descomponerse en dos partes CD = CD0 + CDisiendo CD0 el
coeficiente de resistencia parasita (con sustentacion nula) y CDiel de resistencia inducida (inducida
por la sustentacion). En general, la dependencia de CDicon Re es despreciable, mientras que la de
CD0 no es despreciable, ya que el coeficiente de friccion en la superficie del avion depende del numerode Reynolds.
En este curso, por simplicidad, no se considera la dependencia con el numero de Reynolds.
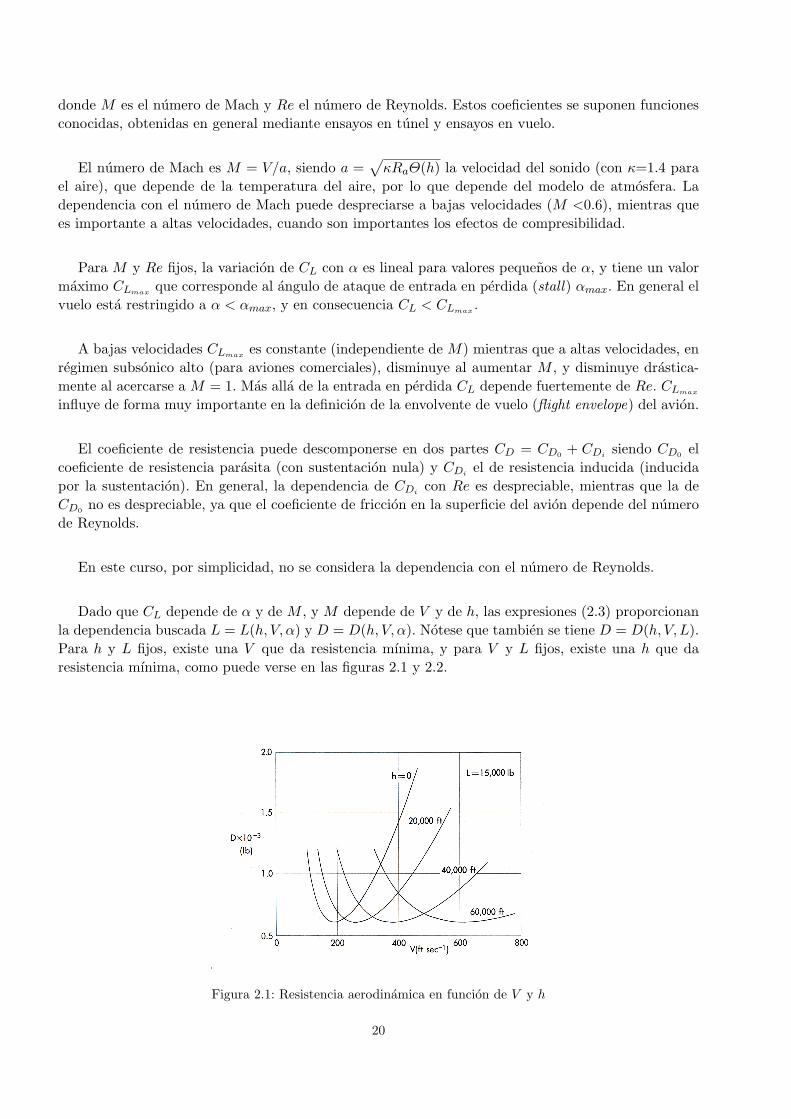
Dado que CL depende de α y de M , y M depende de V y de h, las expresiones (2.3) proporcionanla dependencia buscada L = L(h, V, α) y D = D(h, V, α). Notese que tambien se tiene D = D(h, V, L).Para h y L fijos, existe una V que da resistencia mınima, y para V y L fijos, existe una h que daresistencia mınima, como puede verse en las figuras 2.1 y 2.2.
Figura 2.1: Resistencia aerodinamica en funcion de V y h
20

Figura 2.2: Resistencia aerodinamica en funcion de V y h (cont.)
2.2.1 Polar
Una vez despreciada la dependencia con el numero de Reynolds, a partir de las expresiones (2.4)se tiene CD = CD(CL,M), expresion que recibe el nombre de polar del avion, ver figura 2.3.
Figura 2.3: Polar del avion
Una buena aproximacion a la polar real de un avion es la polar parabolica,
CD = CD0(M) + CD1(M)CL + CD2(M)C2L (2.5)
cuya validez se muestra en la figura 2.4; CD0 es el coeficiente de resistencia parasita y el resto el deresistencia inducida. Un modelo mas sencillo es el de polar parabolica simetrica
CD = CD0(M) + k(M)C2L (2.6)
En el caso de vuelo a bajas velocidades (M <0.6) los coeficientes de la polar CD0 , CD1 , CD2 o bienCD0 , k son constantes (independientes del numero de Mach). A altas velocidades, en regimen subsonico
21
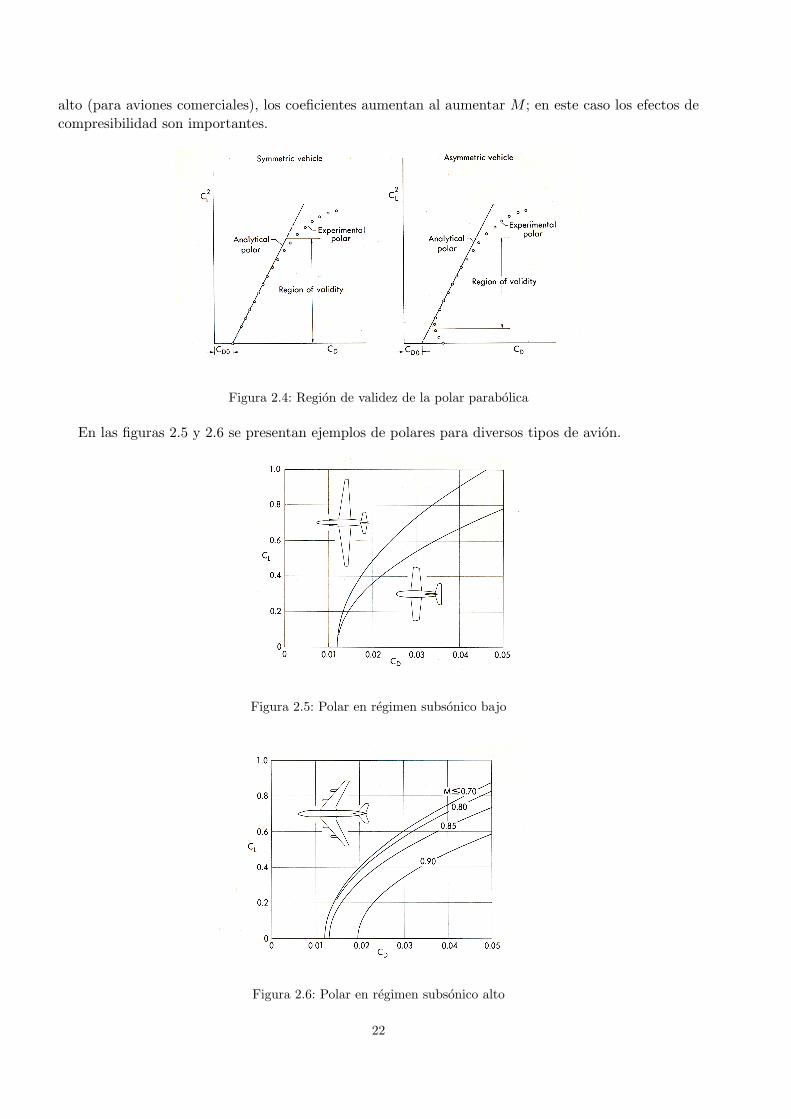
alto (para aviones comerciales), los coeficientes aumentan al aumentar M ; en este caso los efectos decompresibilidad son importantes.
Figura 2.4: Region de validez de la polar parabolica
En las figuras 2.5 y 2.6 se presentan ejemplos de polares para diversos tipos de avion.
Figura 2.5: Polar en regimen subsonico bajo
Figura 2.6: Polar en regimen subsonico alto
22
2.2.2 Eficiencia aerodinamica
La eficiencia aerodinamica se define como el cociente entre la sustentacion y la resistencia aero-dinamica
E =L
D=
CL
CD(2.7)
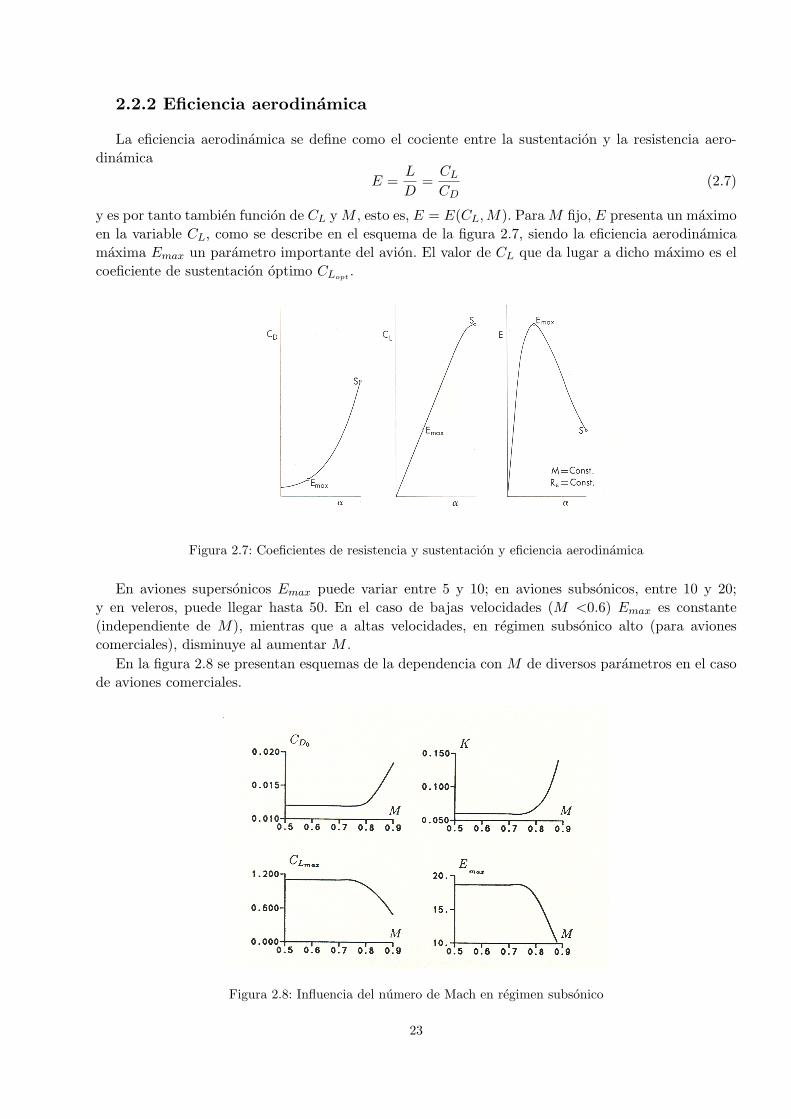
y es por tanto tambien funcion de CL y M , esto es, E = E(CL,M). Para M fijo, E presenta un maximoen la variable CL, como se describe en el esquema de la figura 2.7, siendo la eficiencia aerodinamicamaxima Emax un parametro importante del avion. El valor de CL que da lugar a dicho maximo es elcoeficiente de sustentacion optimo CLopt
.
Figura 2.7: Coeficientes de resistencia y sustentacion y eficiencia aerodinamica
En aviones supersonicos Emax puede variar entre 5 y 10; en aviones subsonicos, entre 10 y 20;y en veleros, puede llegar hasta 50. En el caso de bajas velocidades (M <0.6) Emax es constante(independiente de M), mientras que a altas velocidades, en regimen subsonico alto (para avionescomerciales), disminuye al aumentar M .
En la figura 2.8 se presentan esquemas de la dependencia con M de diversos parametros en el casode aviones comerciales.
Figura 2.8: Influencia del numero de Mach en regimen subsonico
23

2.2.3 Velocidad de entrada en perdida
La velocidad de entrada en perdida Vs es la velocidad de vuelo que corresponde a CLmax. Si se
define el factor de carga n = L/W siendo W el peso del avion, se tiene
nW =12ρ(h)V 2
s SCLmax(2.8)
de donde se obtiene
Vs =
√2nW
ρ(h)SCLmax
(2.9)
Para n y ρ dados, Vs es la mınima velocidad de vuelo; esta velocidad limita la envolvente de vuelo delavion a bajas velocidades.
Dado que CLmaxdepende de la configuracion aerodinamica del avion (despegue, aterrizaje, confi-
guracion limpia), tambien Vs depende de dicha configuracion. Ademas depende del factor de carga,del peso del avion y de la altitud de vuelo; Vs aumenta al aumentar estos tres factores.
2.2.4 Velocidad equivalente
La velocidad equivalente se define como
Ve = V
√ρ
ρ0(2.10)
donde ρ0 es la densidad ISA al nivel del mar. Ası pues, se verifica
12ρV 2 =
12ρ0V
2e (2.11)
de manera que si la presion dinamica (q =12ρV 2) se mantiene constante durante el vuelo, entonces la
velocidad equivalente es constante independientemente de la altitud. En el calculo de actuaciones delavion, si se considera la velocidad equivalente, se elimina el efecto de la altitud.
Por tanto, se verifica12ρ0V
2e SCL = nW (2.12)
y, entonces, la velocidad equivalente de entrada en perdida viene dada por
Ves=
√2nW
ρ0SCLmax
(2.13)
que es independiente de la altitud. Ası, para una maniobra determinada (n conocido) Veses funcion
solo del peso del avion, de manera que, para un peso dado, el avion siempre entra en perdida a lamisma velocidad equivalente.
2.3 Modelo propulsivo
En esta seccion se van a obtener las funciones T = T (h, V, π) y c = c(h, V, π) para el empujedisponible y el consumo de combustible.
Para modelar el consumo de combustible, se define el consumo especıfico mediante la relacion
cE =gc
T(2.14)
24
de modo que tiene dimensiones de 1/tiempo. Se tiene pues cE = cE(h, V, π).Se definen a continuacion los coeficientes adimensionales de empuje (KT ) y de consumo especıfico
(Kc)
KT =T
pSR
Kc =cEa2
11
ga=
cEa11
g
√Θ11
Θ
(2.15)
siendo SR el area de referencia del motor (el area frontal maxima).Si se toma como variable de control del motor las revoluciones del rotor, es decir π ≡ N , y si se
define el parametro adimensional (parametro de vueltas corregido)
Nc =N
Nmax
a11
a=
N
Nmax
√Θ11
Θ(2.16)
siendo Nmax las revoluciones maximas permitidas del rotor, entonces mediante analisis dimensional seobtiene la siguiente dependencia funcional (despreciando los efectos del numero de Reynolds)
KT = KT (M,Nc)
Kc = Kc(M,Nc)(2.17)
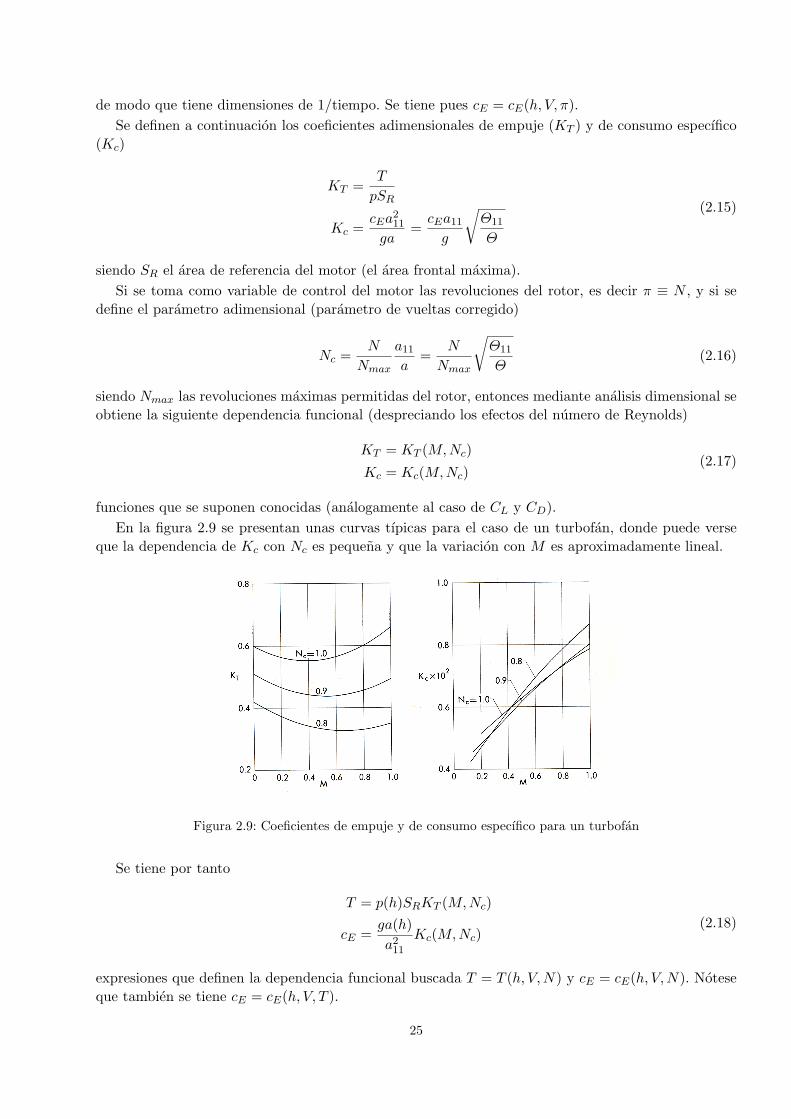
funciones que se suponen conocidas (analogamente al caso de CL y CD).En la figura 2.9 se presentan unas curvas tıpicas para el caso de un turbofan, donde puede verse
que la dependencia de Kc con Nc es pequena y que la variacion con M es aproximadamente lineal.
Figura 2.9: Coeficientes de empuje y de consumo especıfico para un turbofan
Se tiene por tanto
T = p(h)SRKT (M,Nc)
cE =ga(h)a2
11
Kc(M,Nc)(2.18)
expresiones que definen la dependencia funcional buscada T = T (h, V,N) y cE = cE(h, V,N). Noteseque tambien se tiene cE = cE(h, V, T ).
25

La obtencion de las funciones KT y Kc es compleja, por lo que se suele utilizar la siguiente apro-ximacion
T = T11(V, π)(
ρ
ρ11
)x
cE = cE11(V, π)(
ρ
ρ11
)y (2.19)
donde los valores x e y se obtienen mediante un ajuste de los datos proporcionados por el fabricante,y en general satisfacen las siguientes relaciones
en la troposfera ⇒{
0.5 < x < 10 < y < 0.2
(2.20)
en la estratosfera ⇒{
x = 1y = 0
(2.21)
Notese que tambien se verifica
T = T0(V, π)(
ρ
ρ0
)x
cE = cE0(V, π)(
ρ
ρ0
)y (2.22)
2.4 Modelo ISJ
En este curso, con objeto de obtener soluciones de forma sencilla a los distintos problemas deactuaciones, se va a considerar un modelo de avion simplificado, llamado modelo ISJ (Ideal SubsonicJet).
2.4.1 Modelo aerodinamico
El modelo aerodinamico esta definido por una dependencia lineal de CL con α y por una polarparabolica simetrica de coeficientes constantes
CD = CD0 + kC2L (2.23)
Ası pues, la eficiencia aerodinamica es funcion solo de CL
E =CL
CD0 + kC2L
(2.24)
La ecuaciondE
dCL= 0 define el valor de CL que da lugar a eficiencia aerodinamica maxima, esto
es, el coeficiente de sustentacion optimo
CLopt=
√CD0
k(2.25)
siendo la eficiencia aerodinamica maxima
Emax =1
2√
kCD0
(2.26)
26

El coeficiente de resistencia que corresponde a CLoptes
CD(CLopt) = 2CD0 (2.27)
La resistencia aerodinamica es por tanto
D =12ρ(h)V 2SCD0 + k
2n2W 2
ρ(h)V 2S(2.28)
Para n, W y h fijos, la velocidad que corresponde a Emax esta definida por la relacion
nW =12ρ(V |Emax
)2SCLopt(2.29)
y su valor es
V |Emax=
√2nW
ρS
(k
CD0
)1/4
(2.30)
Para n, W y h fijos, la resistencia aerodinamica tiene un mınimo a la velocidad
V |Dmin=
√2nW
ρS
(k
CD0
)1/4
= V |Emax(2.31)
y para n, W y V fijos, tiene un mınimo a la altitud dada por
ρ|Dmin=
2nW
V 2S
√k
CD0
(2.32)
En ambos casos se tiene el mismo valor de la resistencia aerodinamica
Dmin =nW
Emax(2.33)
que es independiente de h y de V . La eficiencia aerodinamica que corresponde a resistencia mınima es
E|Dmin=
L
Dmin= Emax (2.34)
Si se considera la velocidad equivalente (ρ0V2e = ρV 2), la resistencia aerodinamica viene dada por
D =12ρ0V
2e SCD0 + k
2n2W 2
ρ0V 2e S
(2.35)
Para n y W fijos, D tiene un mınimo a la velocidad equivalente
Ve|Dmin=
√2nW
ρ0S
(k
CD0
)1/4
(2.36)
estando Dmin definida por la ecuacion (2.33).
2.4.2 Modelo propulsivo
El modelo propulsivo ISJ es un modelo simplificado en el que se supone que el empuje disponiblees independiente de la velocidad y el consumo especıfico independiente de la velocidad y de la posicionde palanca. Ası pues, se tienen las siguientes expresiones
T = T11(π)(
ρ
ρ11
)x
cE = cE11
(ρ
ρ11
)y (2.37)
27

siendo cE11 constante, y donde x e y toman los siguientes valores
en la troposfera ⇒{
x = 0.7y = 0.2
(2.38)
en la estratosfera ⇒{
x = 1y = 0
(2.39)
Para una altitud dada, el empuje maximo disponible viene dado por
Tmax = T11(πmax)(
ρ
ρ11
)x
(2.40)
siendo πmax el valor maximo del parametro de control del motor (maxima posicion de palanca).
2.5 Medida de la velocidad
En navegacion es necesario disponer a bordo de una medida de la velocidad del avion. En estaseccion se describe como se mide la velocidad.
La medida de la velocidad aerodinamica, esto es, la velocidad del avion con respecto al aire (airs-peed) esta basada en la ecuacion de Bernoulli, que para flujo compresible viene dada por
κ
κ − 1p
ρ+
12ρV 2 =
κ
κ − 1pt
ρt(2.41)
que presupone que el aire es llevado a las condiciones de remanso de forma isentropica, por lo quetambien se verifica
ρt
ρ=
(pt
p
)1/κ
(2.42)
De ambas ecuaciones se obtiene
V 2 =2κ
κ − 1p
ρ
[(pt
p
)κ−1/κ
− 1
](2.43)
A bordo del avion la toma de Pitot-estatica mide la diferencia ∆p = pt − p, por lo que en funcionde esta diferencia de presiones se tiene
V 2 =2κ
κ − 1p
ρ
[(∆p
p+ 1
)κ−1/κ
− 1
](2.44)
Ası pues, la medida de la velocidad aerodinamica requiere medir ademas de ∆p la presion y ladensidad del aire. La velocidad aerodinamica tambien se llama velocidad verdadera o TAS (TrueAirSpeed).
Notese que la ecuacion (2.44) tambien puede escribirse en la forma
V 2 =2a2
κ − 1
[(∆p
p+ 1
)κ−1/κ
− 1
](2.45)
es decir, se tiene
M2 =2
κ − 1
[(∆p
p+ 1
)κ−1/κ
− 1
](2.46)
expresion que permite medir el numero de Mach de vuelo a partir de las medidas de ∆p y p.
28

2.5.1 Velocidad calibrada (CAS)
Sin embargo, a bordo del avion el anemometro indica una velocidad obtenida con la unica medidade la diferencia de presiones ∆p. Se trata de la velocidad calibrada o CAS (Calibrated AirSpeed)definida como sigue
CAS2 =2κ
κ − 1p0
ρ0
[(∆p
p0+ 1
)κ−1/κ
− 1
](2.47)
siendo p0 y ρ0 la presion y la densidad ISA al nivel del mar. En realidad el anemometro indica lavelocidad que se conoce como velocidad indicada o IAS (Indicated AirSpeed), que coincide con la CASsalvo por los errores del instrumento. En este curso se supone que no existen tales errores, por lo queIAS y CAS coinciden.
En la practica las operaciones de vuelo se definen en funcion de la CAS.Notese que para un valor de CAS dado, la ecuacion (2.47) define ∆p y la ecuacion (2.44) el valor
correspondiente de V , dado por
V 2 =2κ
κ − 1p
ρ
(1 +
p0
p
[(1 +
κ − 12κ
ρ0
p0CAS2
)κ/(κ−1)
− 1
])κ−1/κ
− 1
(2.48)
Por tanto, la condicion CAS = const define una ley de velocidades V = VC(h), pudiendo comprobarseque V aumenta al aumentar la altitud. Analogamente, la condicion M = const define una ley develocidades V = VM (h).
Si se desprecian los efectos de compresibilidad, la ecuacion de Bernoulli para flujo incompresible es
p +12ρV 2 = pt (2.49)
de donde se obtieneV 2 =
2∆p
ρ(2.50)
En tal caso, la velocidad calibrada se define como sigue
CAS2 =2∆p
ρ0(2.51)
(tambien se tiene esta expresion como aproximacion de la funcion dada por las ecuaciones (2.46) y(2.47) para M2 ¿ 1), por lo que se obtiene
V =√
ρ0
ρCAS (2.52)
donde se ve claramente que para vuelo a CAS = const la velocidad aumenta al aumentar la altitud.La expresion anterior tambien indica que en vuelo a bajas velocidades, en regimen incompresible,
la velocidad calibrada coincide con la velocidad equivalente.
29
Pagina en blanco
30






![PC-to-Mac Transfer Kitcache-1].pdf · Common file types: .mpeg, .mov, .avi Desktop Files – This option includes any file formats located in this folder on your PC . Common file](https://static.fdocument.org/doc/165x107/5f4e305cb8f54b47894e5020/pc-to-mac-transfer-kitcache-1pdf-common-file-types-mpeg-mov-avi-desktop.jpg)





![PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI1].pdf · ΨTeman-teman Paduan Suara Fakultas Angel’s Voice angkatan tua. Noy, Sella, Anton, Damar, Siska, Krisna, Avi, Kak Chika, Mba’](https://static.fdocument.org/doc/165x107/5d199b0c88c993495f8d0c68/plagiat-merupakan-tindakan-tidak-terpuji-1pdf-teman-teman-paduan-suara-fakultas.jpg)