Semi-active H control for reducing responses of high-speed...
8
Click here to load reader
Transcript of Semi-active H control for reducing responses of high-speed...

Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014 Porto, Portugal, 30 June - 2 July 2014
A. Cunha, E. Caetano, P. Ribeiro, G. Müller (eds.) ISSN: 2311-9020; ISBN: 978-972-752-165-4
1671
ABSTRACT: To reduce resonant response of high-speed railway bridges, a combination of a tuned mass damper system and a magnetorheological damper (MR-STMD) is proposed in this paper. An H∞ control algorithm for uncertain models with norm-bounded parameters is derived to drive magnetorheological damping forces. The results of the optimal control problem are obtained based on the approach of linear matrix inequalities (LMIs). Besides, adaptive neuro-fuzzy inference system technology (ANFIS) is also used to build the inverse model of MR dampers and enhance the tracking ability of MR dampers. It can lead to quite exact command voltage predictions. Finally, the effectiveness of the MR-STMD controlled by the proposed scheme is evaluated and compared with traditional tuned mass dampers through some numerical simulations. The results show that the MR-STMD controlled by the proposed algorithm can significantly reduce the resonant response of beams when compared with tuned mass dampers. Especially, it can improve the drawbacks of passive TMDs due to the de-tuning effect in manufacturing.
KEY WORDS: High-speed railway bridge, Tuned mass damper, Magnetorheological damper, H∞ control, Uncertain model, Linear matrix inequalities, ANFIS inverse model.
1 INTRODUCTION One of the common characteristics of civil structures is that the inherent structural damping to suppress vibrations is very small, and as a result, disturbances applied to these structures may induce long lasting and sometimes severe structural vibrations. Therefore, many kinds of energy dissipation systems such as tuned mass dampers (TMD), active tuned mass dampers (ATMD), fluid viscous dampers (FVD), piezo actuators and so on for vibration mitigation of civil and large scale mechanical structures have been investigated and developed.
It is well-known that the tuned mass damper is a simple, inexpensive and reliable damping device. It has been successfully implemented in real structures to reduce their dynamic responses due to environmental loadings such as wind and earthquakes. However, as a passive damper, the performance of TMD is limited. The very narrow band of suppression frequency, the ineffective reduction of non-stationary vibration, and the sensitivity problem due to detuning effect in manufacturing are the drawbacks of the TMD.
To overcome these problems, some previous studies [1,2] developed the traditional TMD model by using semi-active TMD systems with tunable damping and stiffness elements. The mechanical structures, in which their geometry parameters can be controlled by actuators, were suggested to adjust the damping and stiffness elements of TMD in these studies. However, it can be seen that they make TMD systems become very complicated and not easy to apply them in practice. More simply and applicably, some other researchers [3,4] replaced the damping elements in TMD systems with magnetorheological dampers. For MR dampers, they are known as a semi-active device with a very small energy required when compared with an active damper. Hence, it provides an extremely promising alternative to passive and active tuned mass dampers. To control MR dampers, the displacement based on-off groundhook (on-off DBG) control
was employed in these studies. The effectiveness of this solution was also proved. However, it should be noted that the on-off DBG algorithm can make the tracking ability of MR damper follow the desired control forces not exactly because its output commands only have the “on” or “off” state.
To improve the problems mentioned above and make MR-STMD dampers more effective, the semi-active H∞ control algorithm for uncertain models and the ANFIS technology to control MR-STMD dampers are proposed in this paper. The optimization algorithm with linear matrix inequalities (LMIs) is also used to get feasible solution to the problem. The numerical simulations and comparison with the traditional TMD dampers are presented to evaluate the effectiveness of MR-STMD dampers controlled by the proposed algorithm.
2 MODELING OF STRUCTURE AND DAMPER
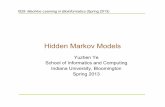
2.1 Train and structural system The high speed load model A8 (HSLM-A8), one of high speed passenger trains in accordance with the requirements of the European Technical Specification [5], is used as a prototype of a moving train in what follows. The train has sixteen cars and the full length of each car is D = 25 m. The rated distance between the two bogies of a car measures d = 2.5 m. All required properties of the train are given in table 1 and figure 1. The train loads are applied at the centerline of single-track bridges with straight decks, and they move along the longitudinal direction at a constant speed.
Then, the equations of motion can be derived by using standard techniques:
( ) ( ) ( )
( ), , ,
, 0
IVB B B B B B v d
s s s s
EI Z x t m Z x t c Z x t F Fm z x t U F
⎧ + + = −⎪⎨ + + =⎪⎩
&& &
&& (1)
where ZB and cB are the vertical displacement and the viscous damping per unit length of the beam, respectively; Fv is the total vertical force of the train applied to the beam and Fd is the total force generated by the damper STMD-MR. Fv is determined by
Semi-active H∞ control for reducing responses of high-speed railway bridges retrofitted by tuned mass damper system with magnetorheological damper
M. Luu1, V. Zabel1, C. Könke1
1Institute of Structural Mechanics, Bauhaus-University Weimar, D-99423 Weimar email: [email protected], [email protected], [email protected]

Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014
1672
[ ]1
( ) H( )vN
v k k kk
F F x vt a t tδ=
= − − −∑ (2)
where Nv is the total number of axles; Fk is the gravity force of the kth wheel-axle set; v is the speed of the train; ak is the longitudinal distance from the ith wheel-axle set to the first wheel-axle set; tk is the time when the kth wheel-axle reaches the bridge; Lb is the total length of the bridge; δ(x − a) and H(t − tk) = H0(t − tk) − H0(t − tk − v/Lb) are the Dirac delta and Heaviside functions.
3 11 3 3.525 dD
31133.525DN xD
d
B
s
Bs
V
kU Z
dL Z
Z
F F
s
A B
sm
s s
Figure 1. Train–bridge system with STMD-MR.
Fd is determined as following:
[ ]( )( ) ( ) ( )d s s s s s s Bs sF x d F U x d k z Z Uδ δ= − + = − − + (3) where ds is the distance from the left end of the beam (x=0) to the TMD; Us is the force of the MR damper and ks is the spring stiffness of TMD obtained by using Den Hartog’s formulae [6] as following
2
;1⎛ ⎞
= =⎜ ⎟+⎝ ⎠Bi s
s s sisi Bi
mk mm
ω μμ
(4)
where ms is the mass of TMD; μsi is the mass ratio; ωBi and mBi are the frequency and the generalized mass associated with the ith mode of the beam.
Table 1. Properties of the HSLM-A8 high-speed train [5]
Universal train
Number of coaches
Coach length
Bogie axle spacing
Point force
N D (m) d (m) F (kN) A8 12 25 2.5 190
2.2 Dynamic modeling of MR damper Several widely used models of MR dampers are briefly introduced, and their abilities to reproduce the hysteresis behavior of MR dampers are compared [7]. One well-known model that is numerically tractable and has been used extensively for modeling hysteretic systems is the Bouc-Wen model. The schematic of this model is shown in figure 2.
Bouc-Wen
0c
0k
x
Us
Figure 2. Bouc-Wen model [7].
The Bouc-Wen model is based on a phenomenological model, which is described by the following nonlinear differential equations (5) - (6) 0 0 0( )sU c x k x x zα= + − +& (5) where z is a hidden variable governed by
1n nz x z z x z Axγ β−= − − +& & && (5a) in which c0 is viscous damping; k0 is stiffness; and x0 is initial displacement. By tuning the parameters γ, β, α and A, this model is able to simulate a variety of hysteretic material of MR dampers.
For the large-scale damper used in this paper, the optimal identified equations for α and c0 as functions of the input voltages u are written as 0 0 0( ) ; ( )a b a bu u c u c c uα α α= + = + (6) and the identified parameters are given in table 2.
Table 2. Model parameters identified for the large-scale damper.
Parameter Value Unit Parameter Value Unit A 6 cm-1 n 2 γ 30 cm-1 x0 18.6 cm β 30 cm-1 k0 10 N/cm
c0a 0.08 Ns/cm c0b 300 Ns/cm αa 2.1 kN/cm αb 34 kN/cm
Inverse model of MR damper for control force: An inverse model of MR dampers as one part of a damping force control scheme is a model that predicts a control input voltage signal for a given displacement, velocity and force. The predicted input voltage, which is the input to MR dampers, is used to produce the desired force. In this section, the adaptive neuro-fuzzy inference system technology (ANFIS), a part of Fuzzy Logic Toolbox in MATLAB® [9], to build the inverse model is used.
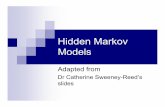
A flowchart to calculate the input voltage signals u(t) is suggested in figure 3. The predicting voltage signal is based on the voltage and previous history of measured velocity v(t), v(t−1), desirable control force Us(t), Us (t−1) and the previous input voltage signal u(t − 1).

Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014
1673
U (t)s
v(t-1)
v(t)
u(t-1)
Adaptive neuro fuzzyinference system
u(t)
U (t-1)s
Figure 3. Flowchart of the inverse model of MR damper by
using ANFIS.
To ensure creation of a valid model, the data used for training must thoroughly cover the spectrum of operation in which the dampers will function. For this reason, the training data contains displacements that range from -40 mm to 40 mm and whose frequency content ranges from approximately 0 to 6 Hz. Signals used for training are produced using band-limited and Gaussian white-noise. A sample rate of 1000 per second is used to produce a total of 40000 sets of data for a simulation time of 40 seconds. Similarly, ranges of the voltage signal and frequency are 0 − 15 V and 0 − 6 Hz, respectively. Signals used for training are also produced using band-limited and Gaussian white-noise.
Of the 40000 original data sets, 14000 are used as training data while the remaining data is used as checking data. After several trials, best results can be found as shown in figures 4. It shows that the behavior of the ANFIS model matches very well with that of the mathematical model (the target model).
Figure 4. Input voltage for validation between the ANFIS model and mathematical model (the target model) and its
tracking error.
3 MODAL SPACE CONTROL
3.1 Equation of motion in modal state space In the equations of motion (1), the displacements of the main beam, ZB(x, t) can be expressed in a series as
T
1( , ) ( ) ( ) ( ) ( )
BN
B Bi Bi B Bi
Z x t x q t x tφ=
= =∑ Φ q (7)
and T
1( ) ( ) ( ) ( )
BN
Bs Bi s Bi B s Bi
Z d q t d tφ=
= =∑ Φ q (8)
where
{ } { }TT1 2 1 2( ) ... ; ( ) ...= =Φ q
B BB B B BN B B B BNx t q q qφ φ φand NB is the number of modes to be considered for the main beam; qBi is the generalized coordinate of the main beam corresponding to the ith mode.
By using the orthogonality properties of the normal modes to simplify the equations of motion of the MDOF system, then equation (1) can be written as
22 ; 1,...,( ) 0
Bi Bi Bi Bi Bi Bi vi si si B
s s s s Bs s
q q q F F U i Nm z k z Z U
ζ ω ω⎧ + + = + + =⎨
+ − + =⎩
&& &
&&(9)
where ζBi , ωBi are the damping ratio and frequency of the main beam for the ith mode, respectively.
The ith modal external force Fvi(x, t) can be determined as
[ ]10
1
1( ) ( ) H( ) ( )d
1 H( ) ( )
v
v
L N
vi k k k BikBi
N
k k Bi kkBi
F t F x vt a t t x tm
F t t vt am
δ φ
φ
=
=
= − − −
= − −
∑∫
∑(10)
and the MR force is
( ) ( )( ) ; ( )= = =Bi s Bi ssi s mBi s s mBi s
Bi Bi
d dU U d U dm m
φ φφ φ (11)
The purpose of the presented method is to predict the
optimal parameters of the control force by minimizing the structural transfer function in the resonant frequency band. It may be known that the structural transfer function at the ith resonant frequency is approximately equal to the ith modal transfer function at its resonant frequency. Therefore, for the ith resonant mode, the spring force of TMD can be expressed approximately as
( )( ) ( ) ; ( )Bi ssi s s Bi s Bi Bs Bi s Bi
Bi
dF k z d q Z d qm
φ φ φ≈ − ≈⎡ ⎤⎣ ⎦ (12)
Then, the equations of motion for the ith mode can be rewritten as following:
[ ]
22
(13)
( ) ( )2
( ) 0( )
Bi Bi
Bi
s sBi Bi Bi Bi Bi s Bi vi si s s
Bi Bi
Bis s s s Bi s Bi si
s
d dq q k q F U k z
m m
mm z k z d q Ud
φ φζ ω ω
φφ
⎧ ⎡ ⎤+ + + = + +⎪ ⎢ ⎥
⎪ ⎢ ⎥⎣ ⎦⎨⎪ + − + =⎪⎩
&& &
&&
In general, the modal active control force Usi makes the
above equations coupled because it depends on all the modal coordinates. However, if each modal control force is designed to depend on the modal state vector T{ }i Bi s Bi sq z q z=v & & alone [10] as 1 2 3 4si i Bi i s i Bi i s i iU G q G z G q G z= + + + =G v& & (14)
where the ith modal control gains 1 2 3 4{ }i i i i iG G G G=G

Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014
1674
and the ith modal state vector T{ }i Bi s Bi sq z q z=v & & . Then, equations (10) become mutually independent. More
commonly, this design procedure is called independent modal space control (IMSC) [10].
It is convenient to rearrange each modal equation system, given in equation (13), in the modal state-space form as following i i i di si wi viU F= + +v A v B B& (15) where
0 0 0
2 2
0 0 1 00 0 0 1
; ;0
( ) 0 0
⎧ ⎫ ⎡ ⎤⎪ ⎪ ⎢ ⎥⎪ ⎪ ⎢ ⎥= =⎨ ⎬ ⎢ ⎥⎪ ⎪ ⎢ ⎥⎪ ⎪ −⎩ ⎭ ⎣ ⎦
v A
Bi
si i
Bi i si i
s Bi s s s
qzq K K Cz dφ ω ω&
&
20 2
0 00 0 ( ); ; ;1 1
0
Bi sdi wi i i s
i
si
dK Km
φω
μ
⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪ ⎡ ⎤⎪ ⎪ ⎪ ⎪= = = − +⎨ ⎬ ⎨ ⎬ ⎢ ⎥
⎣ ⎦⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪− ⎩ ⎭⎩ ⎭
B B
0 0( ) ; 2 and( )
= = − =i s isi s i i i si
i s i s
d mK K Cm m d
φ ζ ω μφ
3.2 H∞ controller design Every vibration mode is individually controlled in the independent modal space control. The selection of the modal control gains Gi must ensure suitable disturbance attenuation ability for the controlled mode. For this purpose, the H∞ controller design is adopted here.
In the H∞ based control system design, a controller is selected to internally stabilize the system in such a way that the H∞ norm of a transfer matrix, which describes certain design objectives, is minimized or becomes smaller than a specified value γi.
System of theith mode
yi
Usi
G i
ziFvi
H controllerh
Figure 5. Framework of the static state feedback control
system in modal state space.
A controlled output considered as a design objective in the H∞ control is formulated here. To satisfy the limit acceleration requirement of the main beam in [5], the controlled output is defined as i i i i wi vi di siz q D F H U= = + +C v&& (16) where
0 0 0 0 ; 1; 1i i si i wi diK K C D H⎡ ⎤= = =⎣ ⎦C
From equations (15) and (16), the mathematical model of the control system can be rewritten as
i i i di si wi vi
i i i di si wi vi
i i
si i i
U FH U D F
U
⎧⎪⎪⎨⎪⎪⎩
v = A v + B + Bz = C v + +
y = v= G v
&
(17)
Then, by taking the Laplace transform for equations (17) the
ith modal system transfer function Ti(s) from the disturbance Fvi to zi as figure 5 is given by
{ } { }=T ( ) ; j=i i viz s F s ωL L where
( )( ) 1T ( )i i di i i di i wi wis H s D−= + − + +C G I A B G B (20)
The problem now is to design a static state feedback control law Usi = Givi such that:
- The resulting closed-loop system is asymptotically stable, and
- The H∞ norm of the closed-loop transfer function Ti(s) denoted by T ( )
∞i s is bounded by a constant γi > 0.
They can be rewritten in a mathematical expression as following min T ( ; )
∞∈<
GGG
i ii i is γ
S (18)
with { }{ }| Re [T ( ; )] 0i i i isσ <G G GS ,
where σ represents the singular values of Ti(s). The solution of inequality (18) can be found through Robust
Control Toolbox in MATLAB®.
For the uncertain model, equations (17) can be rewritten as following:
( ) ( )i i i i di i wi vi
i i i di si wi vi
i i
si i i
FH U D F
U
⎧ +Δ +Δ⎪⎪⎨⎪⎪⎩
v = A A v + B B + Bz = C v + +
y = v= G v
&
where iΔA and iΔB are real matrix functions representing
time-varying parameter uncertainties; 1( ) ;i tΔ =A LF E
1 2( ) ; ( ) ; ( ) 1i it t tΔ = Δ = ≤A LF E B LF E F ; L, E1 and E2 are known real constant matrices which characterize how the uncertain parameters in F(t) enter the normal matrices Ai and Bi.
A powerful tool for approaching the solution of the above control problem is linear matrix inequalities (LMIs) [11]. By choosing a Lyapunov function ( ) ( ) ( )= PT
i iV t v t v t , in
which T 0=P P f , after some algebraic manipulations by using the standard techniques in [11], then the above optimization problem can be rewritten as

Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014
1675
γ2
i subject tominX,Y
(20)
−
⎡ ⎤⎢ ⎥μ =⎢ ⎥⎢ ⎥⎣ ⎦
11 and0 0
M G UG - I 0 X PU 0 J
p fc u wTuTu w
(20a)
where
( ) ( )( )
( )
= +μ
=
⎡ ⎤= +⎣ ⎦⎡ ⎤−γ
= ⎢ ⎥−⎣ ⎦
T T1
T1 2
T T T
2 T
M AX+B Y + AX+B Y LL
G E X+E Y
U B XC Y H
I DJD I
c i di i di
u
w wi i di
i ww
w
where Y is a matrix with appropriate dimensions, μ1 is a positive constant and I is an identity matrix.
Then, the control gain vector is obtained by using 1
i−=G YX .
In practice, there is an upper limit of the force that MR damper can produce, which depends on the motion of the piston and the input voltage. Therefore, the actuator saturation nonlinearity needs to be implemented in the optimization problem (20) as following
max≤si siU U (21)
Equation (21) can be rewritten in LMI form as
T max
000; siUρρ
ρ⎡ ⎤−
=⎢ ⎥−⎣ ⎦
X YY I
p (22)
where 0ρ is a positive upper bound; ρ is a positive real constant to be chosen.
To this end, the semi-active H∞ control system can be depicted in figure 6.
hBeamFv
Fd
SensorResponse ANFIS
MR damper
Hcontroller
Command voltage
Modal state spacePhysical space
STMD
Figure 6. Structure of the semi-active controller for reducing
vibration of beams with STMD-MR damper.
4 SIMULATION RESULTS In this section, the performance of the semi-active static output feedback H∞ controller applied to the simply supported beam under the high-speed train HSLM-A8 is evaluated. The physical properties of the beams are listed in table 3.
Table 3. Properties of the main beam
LB (m) mB (kg/m) ζB (%) ω1 ω2 ω3
30 2.5 × 104 1.0 20.0 80.5 183.8 Note: LB is the length of each span; mB and ζB are the mass per unit length and damping ratio of the beam, respectively; ω (rad/s) is the ith natural frequency of the beam.
In simply supported bridges experiencing resonant
situations, the maximum response will most likely be associated to the contribution of the fundamental mode [12]. Under this circumstance, the response of modes different from the resonant mode is practically negligible in the optimization process.
The design objective of the H∞ controller is to find the control gain G1. By setting the mass ratio μs1=2%, then the spring stiffness ks, obtained by equations (4), is 2.91×106 N/m and ρ0=0.01 in inequality (22). After more than 50 iterations of the optimization process for LMIs (20) and (22) for the certain model, the control gain is G1 = [-19.231 0.081 -0.266 0.125] and the upper bound γ1 = 5.629. These results are also presented in figure 7.
Figure 7. Magnitude of closed-loop transfer functions T1
versus frequency.
In figure 7, it may be seen that the control gain vector determined above can lead to the minimum response of the main system in a large frequency range.
By using the control gain obtained above, the response of the main beam under the train is analyzed in figure 8. It can be found that the actual damping force generated by the MR damper can track the desired control force quite well except some deterioration ranges because of the limitation constrains of the MR damper in which its force is only produced in the first and third quadrants of the hysteretic force-velocity plane meanwhile the desired force can be produced in any of the four quadrants. The upper and lower limits of the MR force are also its constrains. Besides, figures 8 also prove that the phenomenon of the control spillover is not evident in this case.

Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014
1676
Figure 8. Response in time domain: (a) acceleration of the
main beam without STMD-MR damper and with STMD-MR damper versus time; (b) comparison of the actual STMD-MR force and the desire control force; (c) input commend voltage
to STMD-MR damper.
Figure 9. Acceleration of the main beam versus speed of the
train.
Considering the frequency or speed domain, the accelerations at midspan of the main beam are presented in figure 9. The maximum accelerations at midspan of the main beam with the passive damper, the STMD-MR damper and the active damper decrease about 67.3 %, 73.8% and 80.3%, respectively, if compared to the case without any damper. These results demonstrate the effectiveness of the active and semi-active dampers controlled by the proposed algorithm.
Detuning effect: It is well-known that optimal control gains used to generate the desired control force are significantly affected by the controlled structure frequencies. Therefore, knowledge of the controlled primary structure is required in order to accurately calculate control forces. However, structural property estimation and fabrication errors, the time-variant characteristics of the combined system may also make
primary frequencies be tuned. This is called the detuning effect. Thus, the combination of TMD and MR with the uncertain model proposed above to optimize control forces is expected to be a solution to reduce the detuning effect, and is more reliable and applicable for vibration control. To clarify the effectiveness of the proposed model, a numerical simulation for the above beam system is presented here. Firstly, uncertain parameters in equation (19) are set as follows: L, E1 and E2 are the 4 × 1, 1 × 4 and 4 × 1 matrices, respectively. Their elements are defined as following:
( ) ( ) 2 21 0 1 21 1
0
0, 2,40, 3
; ( 1) , 1 ; 01, 3
2( 1) , 3Bi i
B Bi
ii
k i Ei
k iωζ ω
=⎧ ⎫≠⎧ ⎫ ⎪ ⎪= = − − = =⎨ ⎬ ⎨ ⎬=⎩ ⎭ ⎪ ⎪− − =⎩ ⎭
L E
where the factor k0 =1.1. The control gains obtained by solving the optimization
problem (20) are G1 = [47.15 0.27 0.43 0.16]. Then, the maximum response of the main beam with STMD-MR damper versus detuned primary frequencies is shown in figure 10. It shows that when the original frequency of the main beam (ωB) is detuned by increasing ωB to (ωB+Δω), where 0 10%ω≤ Δ ≤ , the maximum acceleration of the main beam with the passive damper increases significantly. This is equivalent to the attenuation of the effectiveness of the traditional tuned mass damper. Meanwhile, the semi-active damper controlled by the proposed algorithm shows very little influence. This can confirm that the presented STMD-MR damper model is much more stable than the passive damper if the detuning effect happens.
Figure 10. Maximum acceleration of the main beam versus
the detuned frequencies on the uncertain model.
5 CONCLUSION Semi-active vibration control of railway bridges under the high-speed train has been investigated. The static output feedback H∞ controller combined with the ANFIS inverse model of MR dampers model proposed in this work can achieve compatible performance. It can be seen that the proper selection of the input data for the ANFIS model in this paper can lead to the quite exact command voltage predictions and this also makes the control voltage diagram versus time become smoother and avoids changing the MR forces

Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014
1677
suddenly. Moreover, the proposed control scheme, validated by the numerical simulations, shows that the band of suppression frequency is extended. This can show that the main drawback of the traditional TMD systems is significantly improved.
REFERENCES [1] S. Nagarajaiah and Sonmez. Structures with semiactive variable
stiffness single/multiple tuned mass dampers. Journal of Structural Engineer, 67-77, 2007.
[2] F. Weber and M. Maslanka. Frequency and damping adaptation of a TMD with controlled MR damper. Journal of Smart Materials and Structures, 21, 2012.
[3] J. H. Koo, M. Ahmadian and M. Setareh. Experimental evaluation of magnetorheological dampers for semi-active tuned vibration absorbers. Journal of Smart Materials and Structures, 2003.
[4] J. Kang, H. S. Kim and D. G. Lee. Mitigation of wind response of a tall building using semi-active tuned mass dampers. Struct. Design Tall Spec. Build. 20 552–65, 2011.
[5] Final PT Draft EN 1990prAnnex A2 European Committee for Standardisation. Basis of Structural Design. Annex A2: Application for bridges. 2002.
[6] J. P Den Hartog, Mechanical vibration, McGraw-Hill, New York, UK, 4th edition, 1956.
[7] B. F. Spencer Jr., S. J. Dyke, M. K. Sain and J. D. Carlson. Phenomenological model for magnetorheological dampers. Journal of Engineering Mechanics, 123, 1997.
[8] X. Long-He and L. Zhong-Xian. Semi-active predictive control strategy for seismically excited structures using MRF-04K dampers. Journal of Central South University, 19:2496–2501, 2012.
[9] The MathWorks. Fuzzy Logic Toolbox 2 - User’s Guide. Matlab, 3 Apple Hill Drive - Natick, MA 01760-2098, 2010.
[10] T T Soong. Active Structural Control: Theory and Practice. Longman Scientific and Technical, 1990.
[11] S. Boyd, L. El Ghaoui, E. Feron, and V. Balakrishnan. Linear Matrix Inequalities in Systems and Control Theory. SIAM, Philadelphia, 1994.
[12] P. Museros, E. Moliner, M.D. Martinez-Rodrigo, Free vibrations of simply-supported beam bridges under moving loads: Maximum resonance, cancellation and resonant vertical acceleration, Journal of Sound and Vibration 332 (2013) 326-345.

![Symmetry, Integrability and Geometry: Methods and Applications … · 2019. 11. 12. · Many of them appear in order reduction procedures as hidden symmetries [1,2,4,5,6,29,40]. During](https://static.fdocument.org/doc/165x107/5fdf03158545604f77619310/symmetry-integrability-and-geometry-methods-and-applications-2019-11-12-many.jpg)