Punzonamento secondo l’Eurocodice 2 Aspetti teorici e ... · Punzonamento secondo l’Eurocodice...
12
Punzonamento secondo l’Eurocodice 2 Aspetti teorici e implementazione nel foglio di calcolo Bartolomeo Ravera 5 marzo 2015 Sommario Il presente articolo espone le modalit`a di calcolo del coefficiente β per le verifiche a punzonamento svolte con l’Eurocodice 1 , presentando le problematiche riscontrate nelle espressioni per il calcolo del coefficiente beta (e conseguentemente del valore di progetto del taglio) e definendo l’algoritmo di calcolo implementato nel software scritto dall’autore, reperibile all’indirizzo: www.bartolomeoravera.it/calcolo/punzonamento.html. Indice 1 Normativa utilizzata 2 2 Coefficiente β 2 2.1 Espressioni presenti nell’Eurocodice ......................... 2 2.2 Problematiche riscontrate .............................. 3 2.3 Estensione ai casi non esplicitamente contemplati nell’Eurocodice ........ 3 2.3.1 Premessa ................................... 3 2.3.2 Convenzioni e simbologia .......................... 4 2.3.3 Espressione generale per il coefficiente β .................. 4 2.3.4 Pilastro d’angolo ............................... 4 3 Coefficiente W 6 3.1 Definizione ...................................... 6 3.2 Cenni teorici sugli integrali di linea ......................... 6 3.3 Espressione generale per W ............................. 6 3.3.1 Caso 1 → W ? ................................ 7 3.3.2 Caso 2 → W ?? ............................... 8 3.4 Pilastro rettangolare di bordo ............................ 9 3.5 Pilastro rettangolare d’angolo ............................ 11 3.6 Pilastro circolare di bordo .............................. 12 3.7 Pilastro circolare d’angolo .............................. 12 1 UNI EN 1992-1-1:2005, considerando le Errata Corrige EC 1-2006, EC 2-2008, EC 3-2012 e l’Appendice Nazionale Italiana (G.U. 27 marzo 2013). 1
Transcript of Punzonamento secondo l’Eurocodice 2 Aspetti teorici e ... · Punzonamento secondo l’Eurocodice...

Punzonamento secondo l’Eurocodice 2
Aspetti teorici e implementazione nel foglio di calcolo
Bartolomeo Ravera
5 marzo 2015
Sommario
Il presente articolo espone le modalita di calcolo del coefficiente β per le verifiche apunzonamento svolte con l’Eurocodice1, presentando le problematiche riscontrate nelleespressioni per il calcolo del coefficiente beta (e conseguentemente del valore di progettodel taglio) e definendo l’algoritmo di calcolo implementato nel software scritto dall’autore,reperibile all’indirizzo: www.bartolomeoravera.it/calcolo/punzonamento.html.
Indice
1 Normativa utilizzata 2
2 Coefficiente β 22.1 Espressioni presenti nell’Eurocodice . . . . . . . . . . . . . . . . . . . . . . . . . 22.2 Problematiche riscontrate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.3 Estensione ai casi non esplicitamente contemplati nell’Eurocodice . . . . . . . . 3
2.3.1 Premessa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.3.2 Convenzioni e simbologia . . . . . . . . . . . . . . . . . . . . . . . . . . 42.3.3 Espressione generale per il coefficiente β . . . . . . . . . . . . . . . . . . 42.3.4 Pilastro d’angolo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
3 Coefficiente W 63.1 Definizione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63.2 Cenni teorici sugli integrali di linea . . . . . . . . . . . . . . . . . . . . . . . . . 63.3 Espressione generale per W . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.3.1 Caso 1 → W ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.3.2 Caso 2 → W ?? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.4 Pilastro rettangolare di bordo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.5 Pilastro rettangolare d’angolo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.6 Pilastro circolare di bordo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123.7 Pilastro circolare d’angolo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1UNI EN 1992-1-1:2005, considerando le Errata Corrige EC 1-2006, EC 2-2008, EC 3-2012 e l’AppendiceNazionale Italiana (G.U. 27 marzo 2013).
1

1 Normativa utilizzata
UNI EN 1992-1-1:2005, considerando le Errata Corrige EC 1-2006, EC 2-2008, EC 3-2012 el’Appendice Nazionale Italiana (G.U. 27 marzo 2013).
2 Coefficiente β
2.1 Espressioni presenti nell’Eurocodice
L’espressione piu generale presente nel § 6.4.3 dell’Eurocodice 2 per il calcolo del coefficienteβ e data da:
β = 1 + kMEd
VEd· u1W1
(6.39)
dove:
� u1 e la lunghezza del perimetri di verifica di base;
� k e un coefficiente che dipende dal rapporto tra le dimensioni del pilastro c1 e c2, tabellatonel prospetto 6.1;
� W1 e funzione del perimetro di verifica di base u1:
Wi =
∫ ui
0|e| dl (6.40)
Vengono poi fornite alcune espressioni, relative ai seguenti casi particolari:
1. pilastro circolare interno soggetto a pressoflessione deviata:
β = 1 + 0.6 πe
D + 4 d(6.42)
2. pilastro rettangolare interno soggetto a pressoflessione deviata:
β = 1 + 1.8
√(e1b2
)2
+
(e2b1
)2
(6.43)
3. pilastro di bordo con eccentricita perpendicolare al bordo verso l’interno e assenza dieccentricita parallela al bordo (e1 > 0, epar = e2 = 0):
β =u1u∗1
(§ 6.4.3, p.to (4))
4. pilastro di bordo con eccentricita perpendicolare al bordo verso l’interno e presenza dieccentricita parallela al bordo (e1 > 0, epar = e2 6= 0):
β =u1u∗1
+ ku1W1
epar (6.44)
2

5. pilastro d’angolo con eccentricita verso l’interno (e1 ≥ 0, e2 ≥ 0):
β =u1u∗1
(6.46)
6. pilastri per i quali e applicabile il § 6.4.3, punto (6): “Per strutture la cui stabilitatrasversale non dipende dal funzionamento a telaio del complesso piastra-pilastri, e se leluci adiacenti non differiscono in lunghezza piu del 25%, per β si possono adottare valoriapprossimati”. Tali valori sono riportati nella figura 6.21N:
� β = 1.15 per un pilastro interno;
� β = 1.40 per un pilastro di bordo;
� β = 1.50 per un pilastro d’angolo;
2.2 Problematiche riscontrate
La valutazione del coefficiente β secondo quanto descritto nel paragrafo precedente presentale seguenti problematiche, che influenzano l’individuazione e la definizione di un algorimo dicalcolo completo:
1. non e esplicitata una formula di validita generale;
2. non e contemplato il caso di pilastro di bordo con eccentricita verso l’esterno;
3. non e contemplato il caso di pilastro d’angolo con eccentricita verso l’esterno;
4. sono presenti alcune imprecisioni nelle formule per il calcolo di β e di W .
2.3 Estensione ai casi non esplicitamente contemplati nell’Eurocodice
2.3.1 Premessa
Nell’analisi del comportamento di una struttura reale la piastra di calcestruzzo e sollecitatain modo vario; e di fondamentale importanza quindi disporre di un procedimento di verificacompleto estendendo la casistica presente nell’Eurocodice.
In mancanza di indicazioni piu accurate, l’algoritmo utilizzato nel foglio di calcolo dame realizzato2 e basato sulle ipotesi e sulle considerazioni espresse di seguito, che ritengoingegneristicamente accettabili e ragionevolmente a favore di sicurezza.
E importante che l’utilizzatore del software sia a conoscenza delle espressioni utilizzate eche ne condivida l’accettabilita3.
Osservazioni e suggerimenti sono ben accetti e possono essere inviati al seguente indirizzoemail: [email protected]
2Reperibile all’indirizzo www.bartolomeoravera.it/calcolo/punzonamento.html. Il foglio di calcolo e messoa disposizione gratuitamente ed e utilizzabile liberamente anche per scopi professionali.
3L’autore si manleva completamente per eventuali errori di qualsivoglia genere inerenti il foglio di calcolo. Eresponsabilita dell’utilizzatore verificare la correttezza dei risultati ottenuti.
3

2.3.2 Convenzioni e simbologia
Si utilizzano le seguenti convenzioni e simbologia:
� gli assi giacenti nel piano della piastra sono denominati “asse 1” e “asse 2”;
� nel caso di una pilastro di bordo, l’asse 1 e diretto verso l’interno della piastra;
� nel caso di pilastro d’angolo, entrambi gli assi sono diretti verso l’interno della piastra;
� le grandezze calcolate con riferimento ad una delle direzioni assiali sono contraddistinteda indici omonimi (ad esempio: W1 rappresenta il valore di W riferito alla direzionedell’asse 1);
� il perimetro di verifica – che in una determinata verifica e identico per entrambe ledirezioni – viene denominato sempre ui (evitando cosı eventuali confusioni);
� l’eccentricita del carico applicato e definita come e = MEd/NEd;
� k1 e riferito a un momento non equilibrato MEd,1 ed e definito nel prospetto 6.1;
� k2 e riferito a un momento non equilibrato MEd,2 ed e definito nel prospetto 6.1, avendocura di sostituire c1/c2 con c2/c1 (oppure, nel caso di pilastro di bordo con eccentricitaparallela al bordo4, con c2/(2 c1) ).
2.3.3 Espressione generale per il coefficiente β
L’espressione (6.39), riferibile al caso di eccentricita presente solo in direzione 1, puo esserecosı generalizzata:
β = 1 +
(k1 |e1|
uiW1
)+
(k2 |e2|
uiW2
)(*.1)
2.3.4 Pilastro d’angolo
Nel caso di pilastri di pilastri d’angolo con eccentricita verso l’interno (cioe e1 ≥ 0 e e2 ≥ 0)l’espressione (6.46) dell’Eurocodice fa riferimento a un perimetro di verifica ridotto u∗1, lungoil quale la forza di punzonamento puo considerarsi uniformemente distribuita.
A questo riguardo si possono tuttavia fare due osservazioni:
1. il rapporto ui/u∗i rimane costante, indipendentemente dal momento non equilibrato
agente, sottostimando β nel caso di eccentricita elevate;
2. eccentricita anche modeste dirette verso l’esterno comportano l’applicazione dell’espres-sione (6.39) invece della (6.46), con salti notevoli del valore del coefficiente β.
4A questo riguardo, l’espressione riportata nell’eurocodice dopo la (6.44) e ambigua: innanzi tutto non echiaro se a denominatore vada posto “2” o “2 c2”, inoltre dovrebbero essere presumibilmente scambiati gliindici. A mio parere l’espressione corretta e c2/(2 c1).
4

Per tali motivi, operando a favore di sicurezza, si e scelto di utilizzare nelle formulecorrispondenti il valore massimo delle seguenti espressioni:
max
ui/u∗i
1 + k |e| · uiW
Per un pilastro d’angolo con e1 ≥ 0 e e2 ≥ 0 (entrambe le eccentricita dirette verso l’internoo nulle) le espressioni si particolarizzano nel seguente modo:
β =
1 se e1 = e2 = 0;
max
(uiu∗i
, 1 + k1 |e1|uiW1
)+ k2 |e2|
uiW2
se e1 ≥ e2;
max
(uiu∗i
, 1 + k2 |e2|uiW2
)+ k1 |e1|
uiW1
se e1 < e2;
Nel caso di eccentricita diretta verso l’esterno (e1 < 0 oppure e2 < 0) si utilizza invecel’espressione generale (*) indicata in precedenza.
5

3 Coefficiente W
3.1 Definizione
Il valore di W e funzione del perimetro di verifica di base ui:
W =
∫ ui
0|e| dl (6.40)
dove:
� dl e la lunghezza infinitesima del perimetro (differenziale);
� e e la distanza di dl dall’asse intorno al quale agisce il momento MEd5.
In pratica, si tratta di risolvere un integrale di linea di prima specie6 lungo il perimetro diverifica ui, costituito da rette e archi di circonferenza.
3.2 Cenni teorici sugli integrali di linea
Semplificando molto le cose – non me ne vogliano troppo i lettori – il problema puo essereinquadrato nel seguente modo.
Data una funzione f(x, y) definita su una curva parametrizzata C espressa da una funzioneC(t) = ((x(t), y(t)), l’integrale curvilineo (o di linea) di prima specie di f lungo la curva C edato da: ∫
Cf(x, y) dl =
∫ b
af ((x(t), y(t))
√x′(t)2 + y′(t)2 dt (�)
Tenendo conto che un arco di circonferenza di raggio R e parametrizzabile (a meno ditraslazioni degli assi) con la curva
C(t) =
{x(t) = R sin t
y(t) = R cos t
si possono pertanto ricavare le espressioni (6.41) e (6.45) indicate nell’Eurocodice7, nonche leespressioni generali di W presentate nel paragrafo seguente.
3.3 Espressione generale per W
Si ricava un’espressione generale di W per una porzione “standard” del perimetro di verifica,avente forma ricorrente nelle diverse configurazione dei pilastri; sostituendo adeguatamente iparametri δ1, δ2, δ3, δ4, e δ5 – ed eventualmente sommando varie porzioni per ricostrutire laforma totale del perimetro di verifica – e possibile determinare rapidamente W per pilastriinterni, di bordo e d’angolo, aventi forma rettangolare o circolare.
5Si noti un’infelice scelta della simbologia: in tutte le altre espressioni presenti nel § 6.4.3, il parametro “e”rappresenta l’eccentricita del carico applicato: e = MEd/NEd.
6Per una definizione teorica si veda ad esempio il documento reperibile su internet “Integrali di linea diprima specie” del Prof. Federico Lastaria, docente del Politecnico di Milano.
7Si segnala che l’espressione (6.45) e in realta riferita alla direzione parallela al bordo della piastra: sarebbestato piu chiaro se si fosse usato il simbolo W2 nell’espressione (6.45), scrivendo l’espressione (6.44) nel seguentemodo: β = ui
u∗i
+ k2uiW2
e2.
6

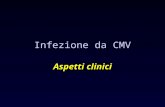
Figura 1: Porzione “standard” del perimetro di verifica (curva AD). Nel “caso 2” l’asseintorno al quale agisce il momento (asse x) interseca l’arco di circonferenza in corrispondenzadell’angolo θ0 = arcsin(δ2/R).
3.3.1 Caso 1 → W ?
[0, δ1]C1−→ R2 C1(t) =
{x(t) = δ5
y(t) = t
[0, δ2]C2−→ R2 C2(t) =
{x(t) = δ5
y(t) = t
[0, π/2]C3−→ R2 C3(t) =
{x(t) = R cos t
y(t) = R sin t+ δ2
[0, δ4]C4−→ R2 C4(t) =
{x(t) = t
y(t) = δ2 + δ3
W =
∫C|e| dl
=
∫C1
|e| dl +
∫C2
|e| dl +
∫C3
|e| dl +
∫C4
|e| dl
=
∫ δ1
0t dt+
∫ δ2
0t dt+
∫ π/2
0(R sin t+ δ2)R dt+
∫ δ4
0(δ2+δ3) dt
=t2
2
∣∣∣∣δ10
+t2
2
∣∣∣∣δ20
+(Rδ2 t−R2 cos t
) ∣∣∣∣π/20
+ (δ2+δ3) t
∣∣∣∣δ40
7

Riordinando, l’espressione generale di W per il caso 1 diventa:
W ? =1
2
(δ1
2 + δ22 + πR δ2
)+R2 + δ2δ4 + δ3δ4 (?)
3.3.2 Caso 2 → W ??
[0, δ1]C1−→ R2 C1(t) =
{x(t) = δ5
y(t) = δ2 + t
[0, θ0]C2−→ R2 C2(t) =
{x(t) = R cos t
y(t) = δ2 −R sin t
[θ0, π/2]C3−→ R2 C3(t) =
{x(t) = R cos t
y(t) = R sin t− δ2
[0, δ4]C4−→ R2 C4(t) =
{x(t) = t
y(t) = δ3
W =
∫C|e| dl
=
∫C1
|e| dl +
∫C2
|e| dl +
∫C3
|e| dl +
∫C4
|e| dl
=
∫ δ1
0(δ2 + t) dt+
∫ θ0
0(δ2 −R sin t)R dt+
∫ π/2
θ0
(R sin t− δ2)R dt+
∫ δ4
0δ3 dt
=
(δ2 t +
t2
2
) ∣∣∣∣δ10
+(Rδ2 t+R2 cos t
) ∣∣∣∣θ00
−(Rδ2 t+R2 cos t
) ∣∣∣∣π/2θ0
+ δ3 t
∣∣∣∣δ40
=
(δ1δ2 +
δ12
2
)+(Rδ2 θ0 +R2 cos θ0 −R2
)−(Rδ2
π
2−Rδ2 θ0 −R2 cos θ0
)+ δ3δ4
Riordinando, l’espressione generale di W per il caso 2 diventa:
W ?? =δ1
2
2+ δ1δ2 +R
(2θ0 −
π
2
)δ2 +R2(2 cos θ0 − 1) + δ3δ4 (??)
8
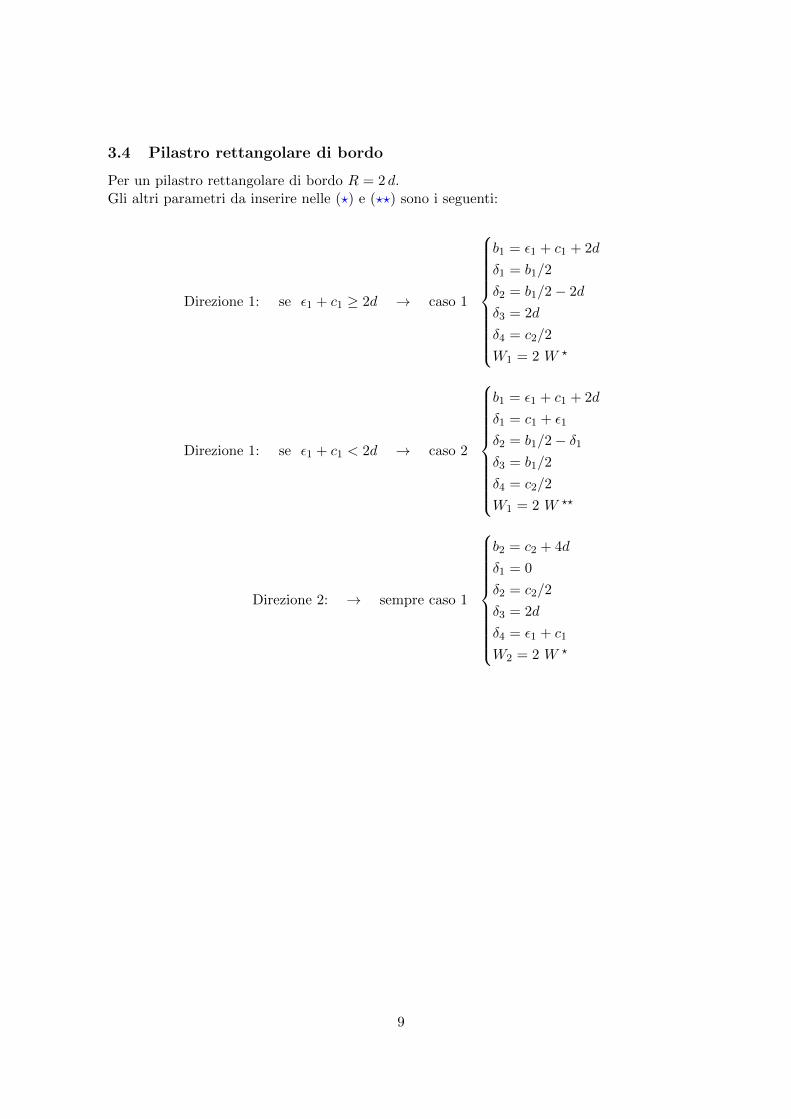
3.4 Pilastro rettangolare di bordo
Per un pilastro rettangolare di bordo R = 2 d.Gli altri parametri da inserire nelle (?) e (??) sono i seguenti:
Direzione 1: se ε1 + c1 ≥ 2d → caso 1
b1 = ε1 + c1 + 2d
δ1 = b1/2
δ2 = b1/2− 2d
δ3 = 2d
δ4 = c2/2
W1 = 2 W ?
Direzione 1: se ε1 + c1 < 2d → caso 2
b1 = ε1 + c1 + 2d
δ1 = c1 + ε1
δ2 = b1/2− δ1δ3 = b1/2
δ4 = c2/2
W1 = 2 W ??
Direzione 2: → sempre caso 1
b2 = c2 + 4d
δ1 = 0
δ2 = c2/2
δ3 = 2d
δ4 = ε1 + c1
W2 = 2 W ?
9
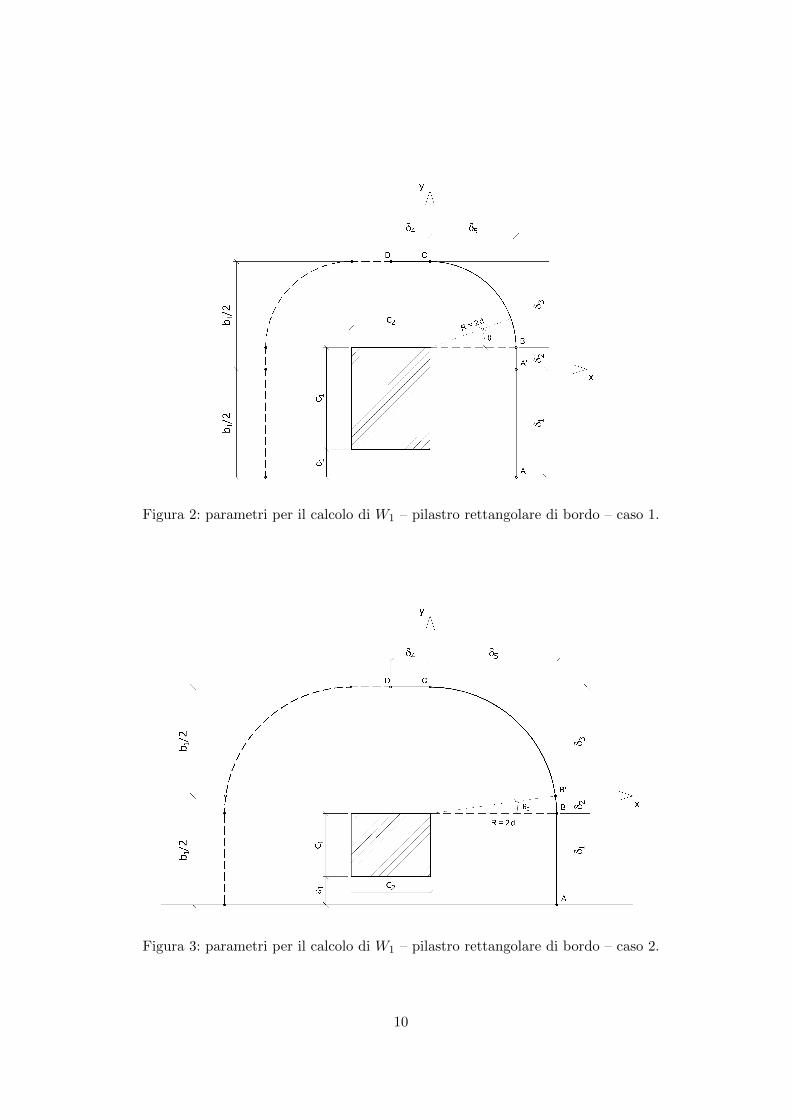
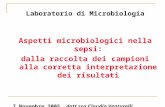
Figura 2: parametri per il calcolo di W1 – pilastro rettangolare di bordo – caso 1.
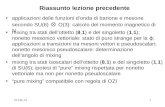
Figura 3: parametri per il calcolo di W1 – pilastro rettangolare di bordo – caso 2.
10
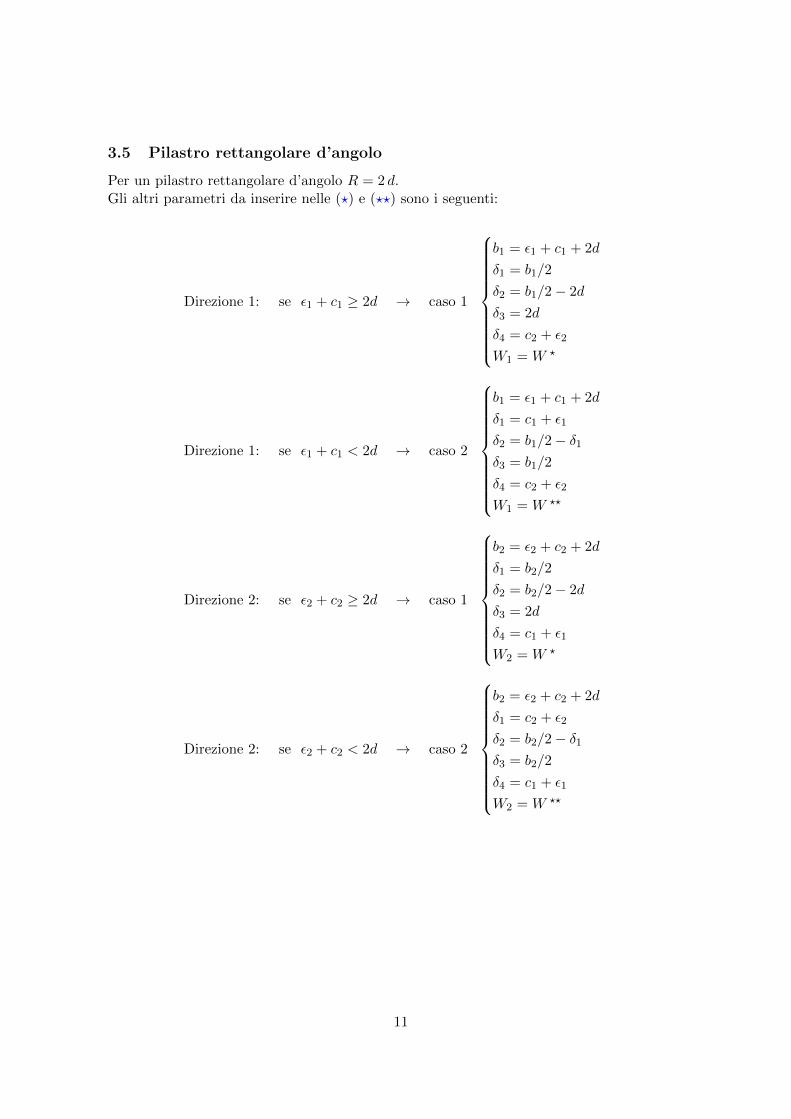
3.5 Pilastro rettangolare d’angolo
Per un pilastro rettangolare d’angolo R = 2 d.Gli altri parametri da inserire nelle (?) e (??) sono i seguenti:
Direzione 1: se ε1 + c1 ≥ 2d → caso 1
b1 = ε1 + c1 + 2d
δ1 = b1/2
δ2 = b1/2− 2d
δ3 = 2d
δ4 = c2 + ε2
W1 = W ?
Direzione 1: se ε1 + c1 < 2d → caso 2
b1 = ε1 + c1 + 2d
δ1 = c1 + ε1
δ2 = b1/2− δ1δ3 = b1/2
δ4 = c2 + ε2
W1 = W ??
Direzione 2: se ε2 + c2 ≥ 2d → caso 1
b2 = ε2 + c2 + 2d
δ1 = b2/2
δ2 = b2/2− 2d
δ3 = 2d
δ4 = c1 + ε1
W2 = W ?
Direzione 2: se ε2 + c2 < 2d → caso 2
b2 = ε2 + c2 + 2d
δ1 = c2 + ε2
δ2 = b2/2− δ1δ3 = b2/2
δ4 = c1 + ε1
W2 = W ??
11
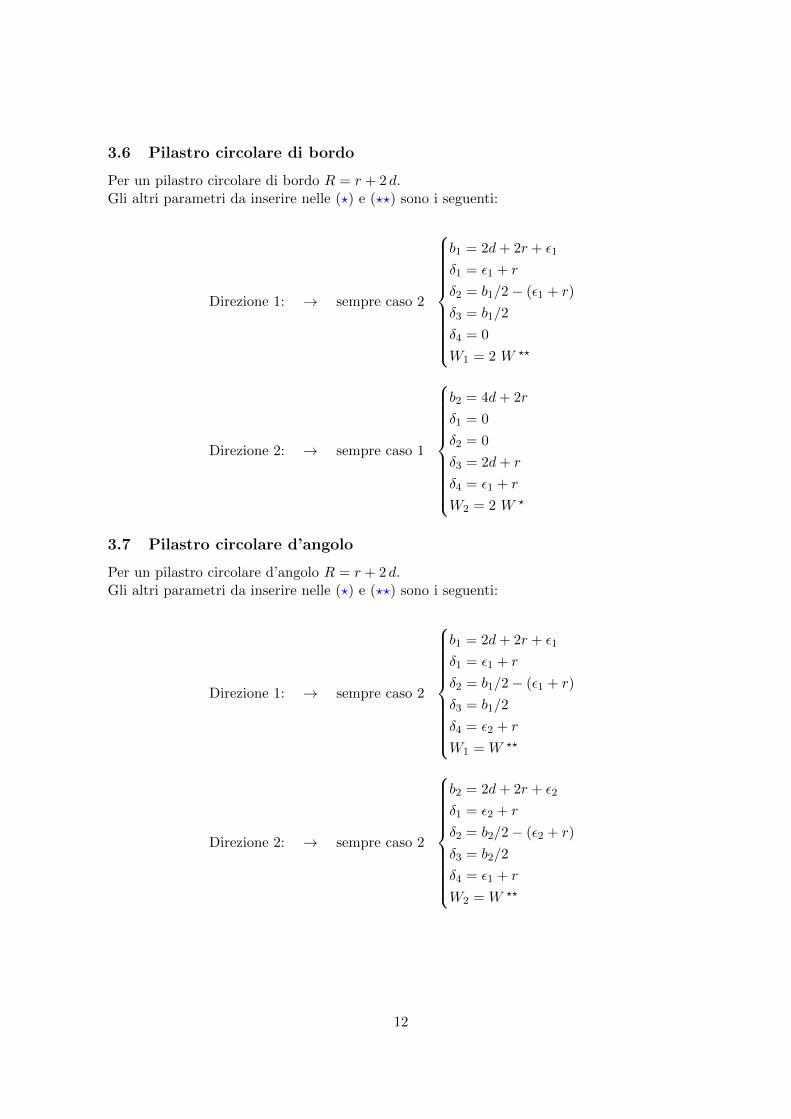
3.6 Pilastro circolare di bordo
Per un pilastro circolare di bordo R = r + 2 d.Gli altri parametri da inserire nelle (?) e (??) sono i seguenti:
Direzione 1: → sempre caso 2
b1 = 2d+ 2r + ε1
δ1 = ε1 + r
δ2 = b1/2− (ε1 + r)
δ3 = b1/2
δ4 = 0
W1 = 2 W ??
Direzione 2: → sempre caso 1
b2 = 4d+ 2r
δ1 = 0
δ2 = 0
δ3 = 2d+ r
δ4 = ε1 + r
W2 = 2 W ?
3.7 Pilastro circolare d’angolo
Per un pilastro circolare d’angolo R = r + 2 d.Gli altri parametri da inserire nelle (?) e (??) sono i seguenti:
Direzione 1: → sempre caso 2
b1 = 2d+ 2r + ε1
δ1 = ε1 + r
δ2 = b1/2− (ε1 + r)
δ3 = b1/2
δ4 = ε2 + r
W1 = W ??
Direzione 2: → sempre caso 2
b2 = 2d+ 2r + ε2
δ1 = ε2 + r
δ2 = b2/2− (ε2 + r)
δ3 = b2/2
δ4 = ε1 + r
W2 = W ??
12