Performance and Robustness of the Smith Predictor Controller
16
Performance and Robustness of the Smith Predictor Controller By Helene Paulsen Supervisor: Sigurd Skogestad Co-supervisor: Vinicius De Oliveira
description
Performance and Robustness of the Smith Predictor Controller. By Helene Paulsen Supervisor: Sigurd Skogestad Co-supervisor: Vinicius De Oliveira. Motivation. Performance and robustness of processes with time delays Time delay compensation Compare SP with PI - PowerPoint PPT Presentation
Transcript of Performance and Robustness of the Smith Predictor Controller

Performance and Robustness of the Smith
Predictor Controller
By Helene Paulsen
Supervisor: Sigurd SkogestadCo-supervisor: Vinicius De Oliveira

Motivation
• Performance and robustness of processes with time delays
• Time delay compensation• Compare SP with PI
• Variation in the real time delay

Process flow sheet

Verification of example from article• FOPTD process with θ0 = 1
• P-controller with τ=1 and Kc=4 discontinuous stability domain
Time Delay Stable/Unstable
0 - 0.3462 Stable
0.3462 – 0.5668 Unstable
0.5668 – 1.4425 Stable
1.4425 – 1.8206 Unstable
1.8206 – 2.5320 Stable
2.5320 Unstable

PI as primary controller in SP
• Same tunings as before continuous stability domain
Time delay Stable/unstable
0 – 2.68 Stable
2.68 Unstable

Robust tuning of SP
• Robust tuning rules• Set-point change and disturbance• Increasing controller gain• Integral squared error (ISE) was used to
compare the performances

Robust tuning
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 13500
4000
4500
5000Set-point tracking
Delay error
ISE
PI SIMCRobust SP

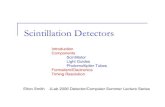
Tight control of SP
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 13500
4000
4500
5000Set-point tracking
Delay error
ISE
PI SIMCRobust SP

-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 10
100
200
300
400
500
600
700Disturbance rejection
Delay error
ISE
PI SIMCRobust SP

Optimization• Trade-off between performance and
robustness• Performance in terms of integral absolute
error (IAE) values• Robustness in terms of the Ms value• Optimal tuning parameters • Optimization of two processes

1 1.5 2 2.5 3
0.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
Robustness, M s
Performance,J
(c)
g = exp(-s)/(s+1)
SPPI

1 1.5 2 2.5 3
0.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
Robustness, M s
Performance,J
(c)
g = exp(-s)/(8s+1)
SPPI

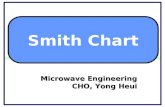
Verification of optimization
• Simulink was used to verify the optimization• Optimal tuning from optimization was used• IAE values were plotted against the time delay
error

Case 1
-1 -0.5 0 0.5 1 1.5 20
100
200
300
400
500
600
700
Delay error
IAE
PISP

Case 2
-1 -0.5 0 0.5 1 1.5 20
100
200
300
400
500
600
700
Delay error
IAE
PISP

Thank you for your attention!