Oversampled A/D Conversion · B. A. Wooley – 7 – EE315 Spring 2002 • Integrator accumulates...
48
B. A. Wooley – 1 – HANDOUT #31 EE315 Spring 2002 Oversampled A/D Conversion Basic concept: Exchange resolution in time for that in amplitude through the used of oversampling, feedback and digital filtering. Oversampling Modulators Predictive • ∆ Modulation • DPCM (Differential PCM) Noise-Shaping • Σ∆ Modulation • Cascaded (Multistage) Σ∆ Modulation • Multilevel Σ∆ Modulation • Interpolation Oversampling Modulator Digital Lowpass Filter f N w(kMT) x(kT) f S x(t) y(kT) f S = 1/T = sampling rate f N = 1/MT = Nyquist rate M = oversampling ratio
Transcript of Oversampled A/D Conversion · B. A. Wooley – 7 – EE315 Spring 2002 • Integrator accumulates...

B. A. Wooley – 1 – HANDOUT #31EE315
Spring 2002
Oversampled A/D Conversion
Basic concept:
Exchange resolution in time for that in amplitude through the used of oversampling, feedback and digital filtering.
Oversampling Modulators
Predictive
•
∆
Modulation
• DPCM (Differential PCM)
Noise-Shaping
•
Σ∆
Modulation
• Cascaded (Multistage)
Σ∆
Modulation
• Multilevel
Σ∆
Modulation
• Interpolation
OversamplingModulator
DigitalLowpass
Filter
fNw(kMT)x(kT)
fSx(t) y(kT)
fS = 1/T = sampling ratefN = 1/MT = Nyquist rateM = oversampling ratio

B. A. Wooley – 2 – EE315Spring 2002
Benefits of oversampling:
• Relaxed transition band requirements for analog antialiasing (and reconstruction) filters
• Reduced baseband quantization noise power
Antialiasing
fBf
fS 2fS
fBf
x̃ f( )
x f( )
fS = fS(minimum) = 2fB
Input must be band limited priorto sampling
Nyquist Sampling
fB
ffsfs/2
x f( )Antialiasing
Filter
Oversampling
fS > 2fB
Input

B. A. Wooley – 3 – EE315Spring 2002
Baseband Noise
For an active discrete-time quantizer with step size
∆
and sampling rate f
S
(which is not in overload), the quantization noise power is distributed uniformly across the Nyquist bandwidth.
The power spectral density of the quantization error, e, is
and all of the quantization noise is aliased into the Nyquist band, –f
S
/2 to f
S
/2.
When f
B
= f
S
/2, then the baseband (–f
B
< f < f
B
) quantization noise power is
Ne(f)
fB–fB fS/2–fS / 2
NB
f
Ne f( ) e2
fS------
∆2
12------
1fS-----= =
SB0 Ne f( ) fd
fB–
fB
∫ ∆2
12------= =

B. A. Wooley – 4 – EE315Spring 2002
When f
B
< f
S
/2, the baseband quantization noise power is
where
= OVERSAMPLING RATIO
2
×
increase in M
⇒
3dB reduction in S
B
⇒
1/2 bit increase in resolution
A much greater improvement in resolution with increasing M can be obtained by embedding the quantizer in a feedback loop.
FEEDBACK can be use for PREDICTION (
∆
modulation) or NOISE SHAPING (
Σ∆
modulation)
In general, noise shaping modulators are more robust and easier to implement than predictive modulators
SB Ne f( ) fd
fB–
fB
∫ ∆2
12------
1fS-----
Ne f( ) fd
fB–
fB
∫= =
SB0
2fB
fS---------
=SB0
M----------=
MfS
2fB---------≡

B. A. Wooley – 5 – EE315Spring 2002
Delta Modulation
• Quantizes the difference between the input x, and the quantization signal, q
• q is generated by accumulating the quantized differences
• Typically a 1-bit quantizer with a small step size; step size can be adapted to accommodate “slope overload” (signal changing too fast).
• Fundamental practical problem is the accumulation of D/A mismatch error in the demodulator
D/A
Σ–
+x
Quantizer
Integrator
q
y vD/A
MODULATOR DEMODULATOR
∫
∫
1-bitcode

B. A. Wooley – 6 – EE315Spring 2002
Noise Shaping Modulators
• Sample and coarsely quantize the input at a rate well above the Nyquist rate
• Shape the spectrum of the quantization noise so as to push most of its energy outside the signal baseband
• Out-of-band noise, including quantization noise, is suppressed by a subsequent digital lowpass filter (DECIMATION FILTER)
• Output of the digital filter can be resampled at a lower sampling rate if the filter provides adequate antialiasing, as well as noise suppression
Σ∆ Modulation
Simplest noise-shaping modulator is a first-order Σ∆ (or ∆Σ) modulator with 1-bit quantization
D/A
–
+
QuantizerIntegrator
x(kT)
q(kT)
y(kT) v(kT)
Modulator Demodulator
1-bitcode
∫u(kT)
D/Aw(kT)
–

B. A. Wooley – 7 – EE315Spring 2002
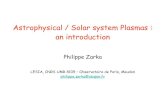
• Integrator accumulates the difference between the input, x(kT), and the quantization signal, q(kT)
• Feedback keeps the integrator output, w(kT), near zero, thus minimizing the low-frequency difference between x and q
• For 1-bit quantization:
– No D/A nonlinearity
– Quantizer just a comparator
– 2-level D/A converter can be an analog switch network toggling between + and – full scale
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0 50 100 150 200 250
Mo
du
lato
r In
pu
t, Q
uan
tize
r O
utp
ut
Time (t/T)
Σ∆ Modulator Response

B. A. Wooley – 8 – EE315Spring 2002
Linearized Discrete-Time Model:
In this representation of a “first-order” Σ∆ modulator, the quantization error is modeled as an additive error sequence, e(kT), with the z-transform E(z).
It is not strictly valid to assume the error sequence is random and uncorrelated with the input, especially when a 2-level quantizer is used. For a 2-level quantizer, the quantization error is highly correlated with the modulator input. Nonetheless, the model does illustrate the shaping of the quantization noise spectrum. It does not account for the appearance of strong discrete noise tones in that spectrum.
A(z) as specified above is simply a delaying discrete-time integrator that can be implemented as:
X(z) Y(z)+
–A(z) +–
E(z)
where A z( ) z 1–
1 z 1––
-----------------=
z–1+
Delay

B. A. Wooley – 9 – EE315Spring 2002
From the above model it follows that
∴
∴
where
(first-order difference)
Thus, in the output Y(z), the quantization error is filtered by the first-order difference HE(z)
In the frequency domain
where
T = 1/fS
Y z( ) A z( ) X z( ) Y z( )–[ ] E z( )+=
Y z( ) A z( )1 A z( )+---------------------- X z( ) 1
1 A z( )+---------------------- E z( )+=
1 A z( )+ 1 z 1–
1 z 1––
-----------------+ 1
1 z 1––
-----------------= =
A z( )1 A z( )+----------------------
z 1–
1 z 1––
-----------------
1 z 1––( ) z 1–
= =
Y z( ) z 1– X z( ) HE z( )E z( )+=
HE z( ) 1 z 1––=
HE jω( ) 1 e jωT––( ) 2e jωT 2⁄– ejωT 2⁄ e j– ωT 2⁄
–2
------------------------------------------- = =
2e jωT 2⁄– j ωT 2⁄( )sin[ ]=
2e jωT 2⁄–( ) e jπ 2⁄–( ) ωT 2⁄( )sin[ ]=
2 ωT 2⁄( )sin[ ] e j ωT π–( ) 2⁄–=

B. A. Wooley – 10 – EE315Spring 2002
Thus,
If Ne(f) is the power spectral density of the quantization error e(kT), the spectral power density of the quantization noise in the modulator output is:
HE f( ) 2 ωT2
-------- sin 2 2πfT
2-------------
sin= =
2 πfT( )sin= 2 πf fS⁄( )sin=
Ny f( ) HE f( ) 2Ne f( )=
First-Order Noise Shaping
Ideal DigitalLowpass Filter
FrequencyfB fN fS/2
No
ise
Sh
apin
g F
un
ctio
n
Noise Shaping

B. A. Wooley – 11 – EE315Spring 2002
If it is assumed that the spectrum of the quantization error is white, which is not actually the case, and if SQ denotes the quantization error power,
then
and the baseband quantization noise power in the modulator output is
If f << fS = 1/T, then
and
SQ e2≡ ∆2
12------=
Ne f( )SQ
fS-------
∆2
12------
1fS-----= =
SB NY f( ) fd
fB–
fB
∫ HE f( ) 2Ne f( ) fd
fB–
fB
∫= =
SQ
fS------- 2 πfT( )sin[ ] 2 fd
fB–
fB
∫=
πfT( ) πfT≅sin π f fS⁄( )=
SB 4SQ
fS-------
π ffS-----
2fd
fB–
fB
∫≅ 4π2 SQ
fS3
------- f3
3----
fB–
fB
=
4π2 SQ
fS3
------- 2fB
3
3---------
=π2
3------
2fB
fS---------
3SQ=

B. A. Wooley – 12 – EE315Spring 2002
∴
Since a full-scale sinusoid has an amplitude of at most ∆/2, the maximum dynamic range of the modulator is
Each 2× increase in M results in a 9dB in dynamic range, which corresponds to 1.5 bits of resolution
Because of the spectral tones that result from the correlation of the quantization error with the input, the dynamic range of a first-order Σ∆ modulator with 1-bit quantization is not as large as this result indicates
SBπ2
3------ 1
M-----
3SQ≅ π2
3------ 1
M-----
3 ∆2
12------
=
DR 10 ∆ 2⁄( )2 2⁄SB
--------------------------log=
10 ∆2 8⁄
π2
3------ 1
M-----
3 ∆2
12------
---------------------------------log= 10 9
2π2---------M3log=
10 9
2π2--------- 30 M( )log+log=

B. A. Wooley – 13 – EE315Spring 2002
Error Compensation Model of a Σ∆ Modulator
Configuration of original patent on Σ∆ modulation (Cutler, U.S. Patent 2,927,962, 3/8/60); referred to as a transmitting terminal using error compensation
∴
Thus, this topology provides first-order noise shaping. However, it is difficult to implement.
The error compensation topology can be rearranged as follows to obtain the conventional first-order Σ∆ modulator.
Predictor
Quantizer
+xn
DELAY
+
εn
yn+
qn
yn xn qn– εn+=
qn εn 1–=
yn xn εn εn 1––+=
Y z( ) X z( ) 1 z 1––( )E z( )+=

B. A. Wooley – 14 – EE315Spring 2002
First, the delay is moved in to the forward path:
This configuration implements the noise-differencing relationship with a delay of the input:
Next, simply rearrange the paths at the input and output of the quantizer to obtain the conventional first-order Σ∆ modulator
+xn
+
εn
yn+
qn
DELAY
yn xn 1– εn εn 1––+=
Y z( ) z 1– X z( ) 1 z 1––( )E z( )+=
+xn
εn
yn+
qn
DELAY+
IntegratorQuantizer

B. A. Wooley – 15 – EE315Spring 2002
Oversampling A/D Conversion
Combine an oversampling noise-shaping modulator with a low-pass digital filter that removes the out-of-band quantization noise. The digital filter also provides the antialiasing need to allow resampling at a lower sampling rate (“decimation”).
Higher-Order Σ∆ Modulators
• Single quantizer
Multi-loop noise differencing
Single-loop with multi-order filter
• Cascaded (multistage)
ANALOGIN
DIGITALOUT
OVERSAMPLINGMODULATOR
DECIMATIONFILTER
f /Msfs
f = Sampling Rate
M = Oversampling Ratio
s

B. A. Wooley – 16 – EE315Spring 2002
Single-Quantizer Modulator
X(z) Y(z)+
–A(z) +–
F(z)
E(z)
Y z( ) HX z( )X z( ) HE z( )E z( )+=
HX z( ) A z( )1 A z( )F z( )+----------------------------------=
HE z( ) 11 A z( )F z( )+----------------------------------=
A z( )HX z( )HE z( )---------------=
F z( )1 HE z( )–
HX z( )-------------------------=

B. A. Wooley – 17 – EE315Spring 2002
Noise Differencing Modulators
Class of modulators for which
That is
and
Noise differencing modulators can be implemented with a single quantizer and L nested loops. However, limit cycle instability occurs for L > 2.
For an Lth order noise differencing modulator
The quantization noise is thus shaped as
Y z( ) z n– X z( ) 1 z 1––( )
LE z( )+=
HX z( ) z n–= HE z( ) 1 z 1–
–( )L
=
HE z( ) 1 z 1––( )
L=
HE f( ) 2 πf fS⁄( )sin L=
Ny f( ) HE f( ) 2Ne f( ) 2 πf fS⁄( )sin[ ] 2LNe f( )= =
L=3
L=2
L=1
Ideal DigitalLowpass Filter
FrequencyfB fN fS/2
No
ise
Sh
apin
g F
un
ctio
n, |
HE(f
)|

B. A. Wooley – 18 – EE315Spring 2002
Baseband Quantization Noise
As in the case of the first-order modulator, if it is assumed that the quantization noise is white with a uniform spectral density SQ/fS, then the quantization noise remaining in the baseband of the output is
If f << fS = 1/T, then
and
Thus, for an Lth order modulator, every doubling of M results in an increase in dynamic range of 6L+3 dB (L+0.5 bits)
SB NY f( ) fd
fB–
fB
∫ HE f( ) 2Ne f( ) fd
fB–
fB
∫= =
SQ
fS------- 2 πfT( )sin[ ] 2L fd
fB–
fB
∫=
πfT( ) πfT≅sin π f fS⁄( )=
SB 22L SQ
fS-------
π ffS-----
2Lfd
fB–
fB
∫ 22Lπ2L SQ
fS2L 1+
--------------- f2L 1+
2L 1+-----------------
fB–
fB
= =
22Lπ2L SQ
fS2L 1+
--------------- 2fB
2L 1+
2L 1+-------------------
=π2L
2L 1+-----------------
2fB
fS---------
2L 1+
SQ=
π2L
2L 1+-----------------
1M-----
2L 1+SQ=

B. A. Wooley – 19 – EE315Spring 2002
Noise differencing modulators can be implemented with a single quantizer and L nested loops. However, limit cycle instability occurs for L > 2. Thus, we consider the case where a single quantizer is used with L = 1 and L = 2:
For HX(z) = 1
L = 1: HE(z) = (1– z–1) ⇒
L = 2: HE(z) = (1– z–1)2 ⇒
≠ 1
0
20
40
60
80
100
120
Dyn
amic
Ran
ge
(dB
)
4 8 16 32 64 128 256 5120
Oversampling Ratio, M
L=1
L=2
L=3
Res
olu
tio
n (
Bit
s)
4
8
16
12
20
A z( ) z 1–
1 z 1––
-----------------=
F z( ) 1=
A z( ) z 1–
1 z 1––( )
2-------------------------=
F z( ) 2 z 1––=

B. A. Wooley – 20 – EE315Spring 2002
A canonical realization of a 2nd-order noise-differencing modulator is thus:
which can be rearranged as
X Y+
––
F(z)
z–1+
z–1
+
z–1
A(z)
+
+
–+
–
E
X Y+
–– z–1+
z–1
+
z–1
+
+ –+
–
+
––
z–1
E

B. A. Wooley – 21 – EE315Spring 2002
The above topology reduces to
Thus, the classical topology for a 2nd-order Σ∆ modulator is
The first integrator in this configuration is nondelaying. Such an integrator can be realized using a delaying integrator identical to that used in the second stage with the following configuration.
X Y+
–– z–1+
z–1
+ ++
––
E
Σ–
+
(nT)x (nT)yA/D
D/A
QUANTIZER
Σ+
+
DELAY
Σ–
+INTEGRATOR 1
Σ+
+DELAY
INTEGRATOR 2
q(nT)
Y(z) = z–1 X(z) + (1 –z–1)2
E(z)

B. A. Wooley – 22 – EE315Spring 2002
which can be rearranged as:
To eliminate the multiply by 2:
(nT)x (nT)yA/D
D/A
QUANTIZER
DELAY
INTEGRATOR 2
DELAY+
INTEGRATOR 1
Σ+
q(nT)
+Σ
–
+Σ
+
+Σ
–
+Σ
+
(nT)x (nT)yA/D
D/A
QUANTIZER
DELAY
INTEGRATOR 1
DELAY
INTEGRATOR 2
2
q(nT)
+Σ
–
+Σ
+Σ
–
+Σ
+
+
(nT)x (nT)y
D/A
DELAY 212
INTEGRATOR 1
Σ+
+DELAY
INTEGRATOR 2
q(nT)
A/D
QUANTIZER
+Σ
–Σ
+
+Σ
–

B. A. Wooley – 23 – EE315Spring 2002
The gain of 2 preceding the second integrator stage results in the need for a large dynamic range at the output of this stage, in turn requiring a signal swing at the input that is well below the supply voltage.
However, if a 2-level quantizer is used, then the “gain” preceding the second stage can be adjusted arbitrarily. In that case, the second stage can be implemented using the same topology as the first stage.
Second-Order Σ∆ Modulator (w/ 2-level quantizer)
Integrator Dynamic Range
(nT)x (nT)yA/D
D/A
QUANTIZER
DELAY12
INTEGRATOR 1
DELAY
INTEGRATOR 2
12
q(nT)
+Σ
–
+Σ
+
+Σ
–
+Σ
+
-1 -0.5 0 0.5 1
Den
sity
Integrator 1 Output/∆
Traditional Modulator
Modified Modulator
-2 -1 0 1 2
Den
sity
Integrator 2 Output/∆

B. A. Wooley – 24 – EE315Spring 2002
Integrator Gain
Integrator model:
Sensitivity of baseband noise to integrator gain:
go
Po
+ z–1 y(kT)x(kT)
DelayClippingGain
Leak
Integrator Gain, g0
-2
-1
0
1
2
3
4
5
0.3 0.4 0.5 0.6 0.7 0.8
Rel
ativ
e B
aseb
and
Err
or
(dB
)
Input Power = – 40 dB

B. A. Wooley – 25 – EE315Spring 2002
Integrator leak
Integrator “leak” refers to the finite dc gain of a practical integrator
+Σ
+H (z) =
1–P0
z -1z -1
P
DELAY
0
AM
PL
ITU
DE
(d
B)
H ⇔
LOG FREQUENCY
0
-1
0
1
2
3
4
5
0 0.5 1 1.5 2
Rel
ativ
e B
aseb
and
Err
or
(dB
)
Analytical Result
Simulation (Input Power = –20 dB)
M/H0

B. A. Wooley – 26 – EE315Spring 2002
Integrator Linearity
with nonlinearity
v(kT + T) = u(kT) + α1[u(kT)]2 + α2[u(kT)]3 + . . .
+ v(kT) + β1[v(kT)]2 + β2[v(kT)]3 + . . .
DELAY+
Ideal Integrator
u(kT) v(kT)
v(kT + T) = u(kT) + v(kT)
70
75
80
85
90
95
100
105
-30 -25 -20 -15 -10 -5 0
TS
NR
(d
B)
Input Level (dB)
Ideal ModulatorSimulationAnalytical Result
σ1 = β1 = 0.01, 0.02, 0.05, 0.1%

B. A. Wooley – 27 – EE315Spring 2002
70
75
80
85
90
95
100
105
-30 -25 -20 -15 -10 -5 0
TS
NR
[d
B]
Input Level [dB]
σ2 = β
2 = 0.05, 0.2, 1.0%
Ideal ModulatorSimulationAnalytical Result

B. A. Wooley – 28 – EE315Spring 2002
Integrator Slewing
Integrator Slewing
u(kT)
kT
v(kT)
DELAY
STEP RESPONSE
v(kT)
v(kT)
kT
STEP RESPONSE
C2
u(kT)
C1
-v(kT)
-5
0
5
10
15
20
25
30
35
0.9 0.95 1 1.05 1.1 1.15 1.2
Rel
ativ
e B
aseb
and
Err
or
(dB
)
Slew Rate (∆/T)
Noise + Distortion
Noise
Input Power = – 5 dB

B. A. Wooley – 29 – EE315Spring 2002
Comparator Hysteresis
1-bit A/D vu
u
v
Hysteresis, h∆
-5
0
5
10
15
20
Rel
ativ
e B
aseb
and
Err
or
(dB
) Simulation (Input Power = –20 dB)
Analytical Result
Hysteresis, h10-2 10-1 100

B. A. Wooley – 30 – EE315Spring 2002
Analog Integration
Two basic circuit approaches to realizing analog integrators in a CMOS technology are CONTINUOUS TIME and SAMPLED-DATA
Continuous Time Integration
• gm-C
• MOSFET-C
Sampled-Data Integration
• Switched-Current
• Switched-Capacitor
Continuous-Time Integrators
Limitations
• Integrator output is sensitive to timing jitter
• Sensitive to waveform asymmetry
e.g. response to ...011000... differs from response to ...010100...
• Waveform asymmetry can enhance spurious noise tones
• Frequency response of loop governed by capacitors and MOS transconductance or resistance
• Poor linearity
−
+
CI
Vi VoA
Vtune
MR
−
+
Vi Vogm
Vtune
CI
MOSFET - C gm - C

B. A. Wooley – 31 – EE315Spring 2002
Switched-Current Integrator
Limitations
• Current sources must be cascode to reduce output conductance ==> high supply voltage
• Large Vgs – VT needed to reduce sensitivity to VT mismatch ==> high power dissipation
• Sensitive to switch parasitics and charge injection
2I kI
VDD
Iin
Iout
Φ1 Φ1 Φ2
M1 M2 M3 = k × M2
Cgs2Cgs1 Cgs3
Iout
Iin--------- kz 1–
1 z 1––
-----------------=

B. A. Wooley – 32 – EE315Spring 2002
Switched-Capacitor Integrator
Fully-differential switched-C integrator
• Common-mode input and output levels can beset independently
−
+
CI
CSΦ1 Φ2
Φ1Φ2Vout
Vin
Vout
Vin-----------
CS
CI------- z 1–
1 z 1––
-----------------
=
CICS
Vcmi Vout
+
−
Φ1
Φ1
Φ1
Φ1
Φ2
+
− +
−
CIΦ2CS
Vcm,in
Φ2
Φ2
Vin
+
−
Vcmo

B. A. Wooley – 33 – EE315Spring 2002
CMOS Implementation of a 2nd-Order Σ∆ Modulator
Timing Diagram
UT
1
1 4
1
1
N
C
C
C
C
V ref
+
V ref
–
V ref
+
V ref
–
Vre
f+
Vre
f–
Vre
f+
Vre
f–
1
t
t
t
thase 1 Phase 2

B. A. Wooley – 34 – EE315Spring 2002
Phase 1
OUT
S1
S1
S1
S1
S3
S3S4
S4
IN
C1
C1
C2
C2
• Sample inputs
• Compare outputs
S3
S3
S4
S4
C1
C1
C2
C2
OUT
S1
S1
S1
S1
S3
S3
S4
S4
IN
C1
C1
C2
C2
• S3 opens before S1
S3
S4
S4
C1
C1
C2
C2
S3

B. A. Wooley – 35 – EE315Spring 2002
Phase 2
UT
S
S
S
S
S2
4
C
C
C C
Vre
f+
Vre
f–
Vre
f+
Vre
f–
Vre
f+
Vre
f–
Vre
f+
Vre
f–
C
• Enable feedback• Integrate• Reset comparator
UT
2S2
2
Vre
f+
Vre
f–
Vre
f+
Vre
f–
V ref
+
V ref
–
V ref
+
V ref
–
S4 opens before S2

B. A. Wooley – 36 – EE315Spring 2002
Operational Amplifier Requirements
• Linear settling ⇒ high slew rate
• High speed ⇒ single-stage amplifier
• Low distortion ⇒ gain > 60dB
• Wide dynamic range ⇒ low noise and large output swing
• Differential architecture
Class AB Op Amp
I bias I bias
VDD
MC2
MC4
VOUT–
Bias 2
Bias 4
MC1
MC3
VOUT+
Bias 1
Bias 3
VIN –VIN+
I1 I2

B. A. Wooley – 37 – EE315Spring 2002
Common-mode biasing:
Comparator
V D
MO
MPLIFIER CORE
MOUT–OUT+
7 5
3 1 Mbias1
Mbias2
2
2
2
6 C8
2 C4Mbias1
Mbias2
B2
φ φ
φ φ
φ φ
φ φ
φ φ
φ φ
OUT
OUT
φ
+
–
VI1
VI2
M9 M3 M4 M10
M5 M6
M7 M1 M2 M8

B. A. Wooley – 38 – EE315Spring 2002
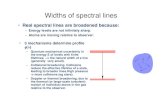
Summary of Measured Performance
Dynamic Range 98 dB (16 bits)
Peak SNDR 94 dB (0.002% THD)
Nyquist rate 50 kHz
Sampling rate 12.8 MHz
Oversampling Ratio 256
Differential input range 4 V
Supply voltage 5 V
Supply rejection 60 dB
Power dissipation 13.8 mW
Active Area 0.39 mm2
Technology 1-µm CMOS
Measured SNDR
0
10
20
30
40
50
60
70
80
90
100
-100 -90 -80 -70 -60 -50 -40 -30 -20 -10 0
SN
DR
(d
B)
Input Level (dB)
Signal Freq. = 2.8 kHzClock Freq. = 12.8 MHzM = 2560 dB = 4V
p-p

B. A. Wooley – 39 – EE315Spring 2002
Baseband Spectrum
Subcircuit Performance
Operational Amplifier
DC gain 67 dB
Unity-gain frequency 50 MHz
Slew rate 350 V/µsec
Linear output range 6 V
Sampling rate 12.8 MHz
Integrator
Settling time constant 7.25 nsec
Comparator
Offset 13 mV
-180
-160
-140
-120
-100
-80
-60
-40
-20
0
0 2 4 6 8 10 12 14 16 18 20 22 24
Po
wer
Sp
ectr
al D
ensi
ty (
dB
)
Frequency (kHz)
–5 dB, 2.8 kHz Input
Measured
Ideal

B. A. Wooley – 40 – EE315Spring 2002
Integrator Step Response
Attributes of 2nd-order Σ∆ modulator:
• Simple architecture
• Very tolerant of component mismatch
• Stable operation
• High linearity
• Small area, low power
-0.5
0
0.5
1
1.5
2
2.5
0 10 20 30 40 50
Dif
fere
nti
al O
utp
ut
Vo
ltag
e (V
)
Time (nS)
Measured
Simulated

B. A. Wooley – 41 – EE315Spring 2002
Quantization Noise Spectra of Σ∆ Modulators
Owing to the correlation of the quantization error with the input in oversampling modulator employing a single quantizer, discrete noise peaks (tones) appear in the output spectrum for certain inputs.
The following simple example illustrates the origin of the noise tones:
(kT):
(kT):
• x(kT) = (0.001) ∆/2
• x(kT) = 0 (Midrange Input)
⇒ No Low Frequency Component
⇒ Frequency Component in Baseband
000 T
• • •
• • •

B. A. Wooley – 42 – EE315Spring 2002
For a single-quantizer modulator, the quantizer error is defined as the difference between the analog input and output of the quantizer:
System analysis (R. Gray, “Spectral Analysis of Sigma-Delta Quantization Noise) of an ideal first-order Σ∆ modulator indicates that the spectrum of the quantizer noise is not white. For a dc input, xdc, the spectrum consists solely of impulses with power
at frequencies
where k is a nonzero integer and represents the fractional part of w.
The strongest tones occur for small values of k because of the reciprocal dependence in the expression for Se(k).
The power in the quantization noise tone in the output of the modulator that corresponds to Se(k) is
+Σ FILTER A/D
D/A
QUANTIZER
–
q(kT)
u(kT)y(kT)x(kT)
e(kT) = q(kT) – u(kT)
Se k( ) ∆2
2πk( )2------------------=
fk kxdc
∆--------- 1
2---+
⟨ ⟩ fS=
w⟨ ⟩
Sy k( )∆2 πfkT( )sin[ ] 2
πk( )2-----------------------------------------=

B. A. Wooley – 43 – EE315Spring 2002
Quantization noise spectrum for a first-order modulator:
Discrete tone in a 2nd-order modulator spectrum:
0
0.1
0.2
0.3
0.4
0.5
0 0.1 0.2 0.3 0.4 0.5
-26-24-22-20-18-16-14-12
0 0.1 0.2 0.3 0.4 0.5DC Input Level x/∆
MS
E (
dB
)F
req
uen
cy f
k/f s
-140
-120
-100
-80
-60
-40
-20
0
0 2 4 6 8 10 12 14 16 18 20 22 24
Po
wer
Sp
ectr
al D
ensi
ty (
dB
)
Frequency (kHz)

B. A. Wooley – 44 – EE315Spring 2002
Quantization noise spectra for M = 256:
Noise spectrum of 2nd-order modulator:
Max
imu
m P
eak
(dB
)
-0.05 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
-120
-110
-100-90
-80-70
-60
-50
k: 2 5 3 4 5 1
First-Order Σ∆ Modulator
-80
-90
-100
-110
-120
Second-Order Σ∆ Modulator
DC Input Level (∆)
Max
imu
m P
eak
(dB
)
-80
-90
-100
-110
-120
-0.05 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5DC Input (∆)
-80
-90
-100
-110
-120
-3 dB Input
Measured
Simulated

B. A. Wooley – 45 – EE315Spring 2002
Tones near midrange in 2nd-order modulator:
Worst tone a 2nd-order modulator:
-120
-115
-110
-105
-100
-95
-90
-0.016 -0.012 -0.008 -0.004 0 0.004 0.008 0.012 0.016
-120
-115
-110
-105
-100
-95
-90
-0.016 -0.012 -0.008 -0.004 0 0.004 0.008 0.012 0.016DC Input (∆)
Max
imu
m N
ois
e P
eak
(dB
) Measured
Simulated
-140
-130
-120
-110
-100
-90
0 5 10 15 20 25
Measured
-140
-130
-120
-110
-100
-90
0 5 10 15 20 25Frequency (kHz)
Simulated
Po
wer
Sp
ectr
al D
ensi
ty (
dB
)

B. A. Wooley – 46 – EE315Spring 2002
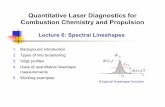
Composite spectra for several DC inputs:
Worst-tones as a function of oversampling ratio:
-140
-130
-120
-110
-100
-90
0 5 10 15 20 25
Po
wer
Sp
ectr
al D
ensi
ty (
dB
)
Frequency (kHz)
E
E
E
E
E
E
E
E
E
E
E
E
D
D
D
D
D
DI
I
I
I
I
I
-120
-110
-100
-90
-80
-70
-60
-50
-40
-30
-20
Wo
rst-
Cas
e T
on
e (d
B)
E Simulated
D Equation (5.4)
I Measured
Oversampling Ratio
8 16 32 64 128 256 512 1024
1st-order Σ∆
2nd-order Σ∆

B. A. Wooley – 47 – EE315Spring 2002
Spectra for a sinusoidal input:
Spectral tones in a single-quantizer, 4th-order Σ∆ modulator:
-140
-120
-100
-80
-60
-40
-20
0
0 10 20 30 40 50
Po
wer
Sp
ectr
al D
ensi
ty (
dB
)
Frequency (kHz)
Second-Order Noise Shaping
-200
-180
-160
-140
-120
-100
-80
0 5 10 15 20 25
Sp
ectr
al P
ow
er (
dB
)
Frequency (kHz)

B. A. Wooley – 48 – EE315Spring 2002
Approaches to “whitening” the error spectrum
• Cascaded sigma-delta modulation
• Multibit quantizers
• Dither
Simulation Requirements
The design of oversampling data converters requires a behavioral simulation capability because of the need to simulate long data traces.
The results presented here were obtained using the program MIDAS, a functional simulator for mixed digital and analog sampled data systems.
MIDAS
• System described by netlist
• Simulate in discrete time
• Includes tools for performance analyses such as spectral analysis, distortion and statistical functions
• Flexible I/O, including interface to test environment
• Written in C++
• User extensible with C-like code
• Not an “expert” tool for novice designers; intended for use by designers who understand what models should be used or constructed