Numeriˇcka stabilnost LVM - nasport.pmf.ni.ac.rsnasport.pmf.ni.ac.rs/materijali/267/Numericka...
28
Numeriˇ cka stabilnost LVM Linearni viˇ sekoraˇ cni metod oblika (1) k j =0 α j y n+j = h k j =0 β j f n+j ,α k =1, za reˇ savanje KP (2) y ′ = f (x,y ),y (x 0 )= y 0 , na segmentu x ∈ [x 0 ,X ]. Neka je ϕ(x) taˇ cno reˇ senje KP. Postoje dva osnovna problema stabilnosti NM koja su se u praksi pokazala kao fundamen- talna za primenu odgovaraju´ ceg metoda: (1) Ako je X>x 0 fiksirano, da li pribliˇ zne vrednosti y n ostaju ograniˇ cene kada h → 0? (2) Ako je h> 0 fiksirano, da li pribliˇ zne vrednosti y n ostaju ograniˇ cene kada X →∞? Prvi problem reˇ sen je uvodjenjem pojma 0−stabilnosti, dok se drugi problem reˇ sava uvod- jenjem pojma apsolutne stabilnosti: numeriˇ cki metod je apsolutno stabilan u odnosu na odredjeni KP i korak h ako numeriˇ cko reˇ senje ostaje ograniˇ ceno kada X →∞. Preciznije, ako postoji konstanta C> 0 koja zavisi samo od poˇ cetne vrednosti y 0 tako da ||y n,h || <C za svako n ≥ 1 . Primer 1. Primeni´ cemo eksplicitni Ojlerov metod (EO) y n+1 = y n + hf (x n ,y n ), n =0, 1, 2,...,N i implicitni Ojlerov metod (IO) y n+1 = y n + hf (x n+1 ,y n+1 ), n =0, 1, 2,...,N na reˇ savanje KP (3) y ′ = μ(y − sin x) + cos x, y π 4 = √ 2 2 , π 4 ≤ x ≤ 9π 4 −→ taˇ cno reˇ senje: y (x) = sin x 1
Transcript of Numeriˇcka stabilnost LVM - nasport.pmf.ni.ac.rsnasport.pmf.ni.ac.rs/materijali/267/Numericka...

Numericka stabilnost LVM
Linearni visekoracni metod oblika
(1)
k∑
j=0
αjyn+j = h
k∑
j=0
βjfn+j, αk = 1,
za resavanje KP
(2) y′ = f(x, y), y(x0) = y0,
na segmentu x ∈ [x0, X ]. Neka je ϕ(x) tacno resenje KP.Postoje dva osnovna problema stabilnosti NM koja su se u praksi pokazala kao fundamen-
talna za primenu odgovarajuceg metoda:
(1) Ako je X > x0 fiksirano, da li priblizne vrednosti yn ostaju ogranicene kada h→ 0?
(2) Ako je h > 0 fiksirano, da li priblizne vrednosti yn ostaju ogranicene kada X → ∞?
Prvi problem resen je uvodjenjem pojma 0−stabilnosti, dok se drugi problem resava uvod-jenjem pojma apsolutne stabilnosti: numericki metod je apsolutno stabilan u odnosu naodredjeni KP i korak h ako numericko resenje ostaje ograniceno kada X → ∞. Preciznije, akopostoji konstanta C > 0 koja zavisi samo od pocetne vrednosti y0 tako da
||yn,h|| < C za svako n ≥ 1 .
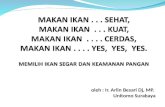
Primer 1. Primenicemo eksplicitni Ojlerov metod
(EO) yn+1 = yn + h f(xn, yn), n = 0, 1, 2, . . . , N
i implicitni Ojlerov metod
(IO) yn+1 = yn + h f(xn+1, yn+1), n = 0, 1, 2, . . . , N
na resavanje KP
(3) y′ = µ(y− sin x)+cosx, y(π4
)=
√2
2,π
4≤ x ≤ 9π
4−→ tacno resenje: y(x) = sin x
1
2 3 4 5 6 7
-2
-1
1
2
2 3 4 5 6 7
-2
-1
1
2
Slika 1: Implicitni Ojlerov metod za µ = −0.2 na [π/4, 9π/4] za korake h = π/10 i h = π/20
2 3 4 5 6 7
-2
-1
1
2
2 3 4 5 6 7
-2
-1
1
2
Slika 2: Eksplicitni Ojlerov metod za µ = −0.2 na [π/4, 9π/4] za korake h = π/10 i h = π/20
2 3 4 5 6 7
-2
-1
1
2
2 3 4 5 6 7
-2
-1
1
2
Slika 3: Implicitni Ojlerov metod za µ = −10 na [π/4, 9π/4] za korake h = π/10 i h = π/20
2 3 4 5 6 7
-3
-2
-1
1
2
3
2 3 4 5 6 7
-3
-2
-1
1
2
3
NUMERICKA NESTABILNOST !!
Slika 4: Eksplicitni Ojlerov metod za µ = −10 na [π/4, 9π/4] za korake h = π/10, h = π/20
2
Mozemo primetiti da konvergencija eksplicitnog Ojlerovog metoda ne garantuje da ce metoddelovati adekvatno u praksi. Dakle, bez obzira kako visok red konvergencije NM teorija pred-vidja, analiza apsolutne stabilnosti metode je cesto presudan faktor u primeni.
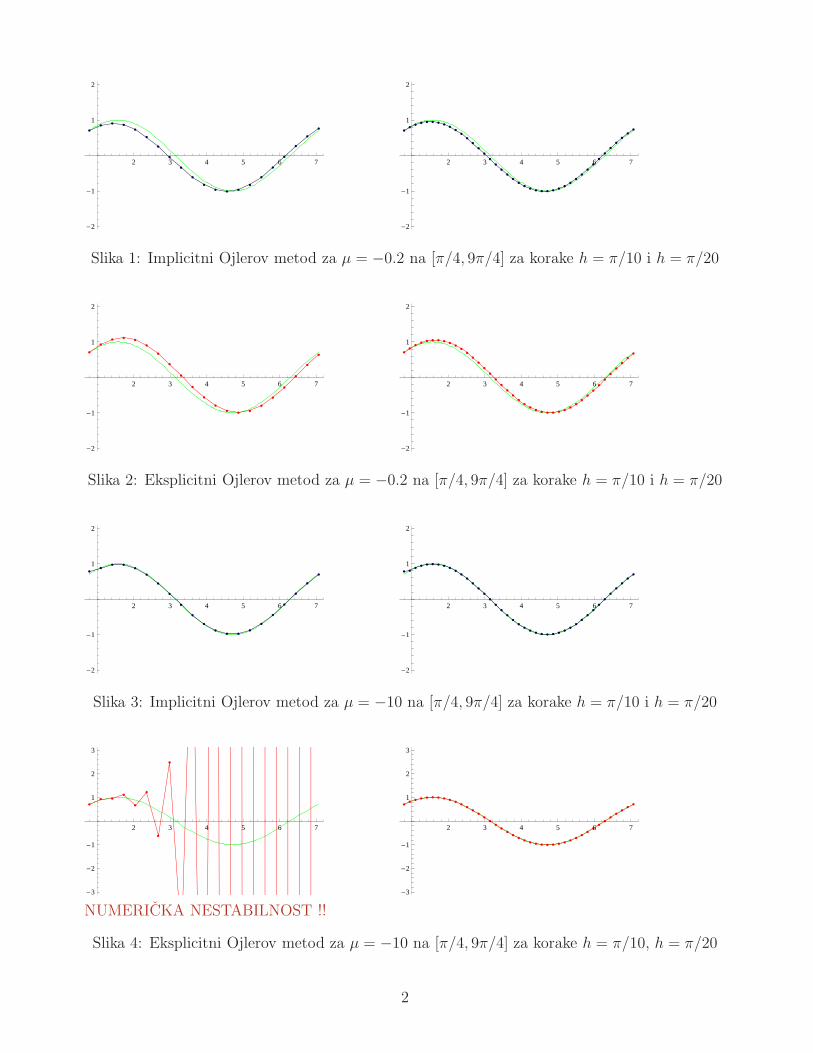
Primer 2. Primenimo metod srednje tacke
(MST ) yn+2 = yn + 2hfn+1
za resavanje KP
(4) y′ = −3y, y(0) = 1, x ∈ [0, X ] −→ y(x) = e−3x tacno resenje
sa korakom h = 0.01. Red tacnosti metode je p = 2, a kako je karakteristicni polinom ρ(z) =z2 − 1 sa nulama z1 = 1, z2 = −1 na jedinicnoj kruznici metod je 0−stabilan. Prema tome,metod je konvergentan.
0.5 1.0 1.5 2.0
0.2
0.4
0.6
0.8
1.0
50 100 150 200
0.0002
0.0004
0.0006
0.0008
Slika 5: Metod srednje tacke za KP (4) na [0, 2] sa startnim vrednostima y0 = 1 i y1 = e−3h
Primenicemo najpre metod uzevsi za drugu potrebnu startnu vrednost tacnu vrednost tj.y1 = y(x1) = y(h) = e−3h. Ako primimo metod na [0, 2] grafik numerickog resenja se gotovo nerazlikuje od tacnog resenja Slika 5 - levo. Tacna vrednost na kraju segmenta je y(2) = e−6 =0.00247875, a dobijena priblizna y200 = 0.00336032 sa greskom e200 = 0.000881571.
Medjutim, ako metod primenimo na [0, 6] (Slika 6 - levo) primecujemo da metod dajezadovoljavajuca resenje do trenutka x ≈ 2, kada se pojavljuju oscilacije u pribliznom resenjukoje eksponencijalno rastu, kao i greska (Slika 6 - desno). Tacna vrednost na kraju segmentaje y(6) = e−18 = 1.523× 10−8, a dobijena priblizna y600 = 142.86 sa greskom e600 = 142.86.
1 2 3 4 5 6
0.02
0.04
0.06
0.08
0.10
100 200 300 400 500 600
5
10
15
NUMERICKA NESTABILNOST !!
Slika 6: Metod srednje tacke za KP (4) na [0, 6] sa startnim vrednostima y0 = 1 i y1 = e−3h
3

Ako metod primenimo na [0, 2] i [0, 3], ali startovanjem sa eksplicitnim Ojlerovim metodom,tj. ako za drugu potrebnu startnu vrednost uzmemo y1 = y0 + hf0 = y0 − 3h y0, numerickanestabilnost je uocljiva gotovo odmah na pocetku izracunavanja. Dobijena priblizna vrednostje 0.0931091 = y200 ≈ y(2) = e−6 = 0.00247875 sa greskom e200 = 0.0906304 i 1.81963 = y300 ≈y(3) = e−9 = 0.00012341 sa greskom e300 = 1.81951.
0.5 1.0 1.5 2.0
0.2
0.4
0.6
0.8
1.0
0.5 1.0 1.5 2.0 2.5 3.0
0.1
0.2
0.3
0.4
0.5
NUMERICKA NESTABILNOST !!
Slika 7: Metod srednje tacke za KP (4) na [0, 2] i [0, 3] sa startnim vrednostima y0 = 1 iy1 = y0 + hf0
Apsolutna stabilnost
Apsolutna stabilnost LVM je blisko povezana sa pojmom stabilnosti normalnog sistema DJ
(5) x′ = f(t, x)
Definicija 1 Resenje x = ϕ(t), ϕ(t0) = ϕ0, sistema DJ (5) je stabilno po Ljapunovu kadt→ ∞, ako za svako ε > 0 postoji δ = δ(ε) > 0, tako da za svako resenje x = x(t), x(t0) = x0ovog sistema, iz ||x0 − ϕ0|| < δ sledi
||x(t)− ϕ(t)|| < ε, t ∈ [t0,∞).
Prema tome, stabilnost resenja po Ljapunovu znaci da bliskost pocetnih uslova uslovljavabliskost resenja za svako t ≥ t0.
Definicija 2 Resenje x = ϕ(t), ϕ(t0) = ϕ0, sistema DJ (5) je asimptotski stabilno po Ljapunovukad t → ∞, ako je stabilno i ako postoji σ > 0, tako da za svako resenje x = x(t), x(t0) = x0ovog sistema, iz ||x0 − ϕ0|| < σ sledi
limt→∞
||x(t)− ϕ(t)|| = 0.
Da bismo bolje razumjeli pojavu (ne)stabilnosti primenimo LVM (1) sa fiksiranim korakomh > 0 na linearan model problem:
MS(λ) : y′ = λ y, y(0) = 1, 0 ≤ x ≤ X
gde je λ ∈ C.
4

Matematicka stabilnost: Tacno resenje problema y(x) = eλx je:
(1) stabilno ako je Re(λ) ≤ 0, tj. |y(x)| ≤ K ⇐⇒ Re(λ) ≤ 0 ;(2) asimptotski stabilno ako je Re(λ) < 0, tj. y(x) → 0, x→ ∞ akko je Re(λ) < 0;(3) nestabilno ako je Re(λ) > 0.
PITANJE: Kada NM ima isto svojstvo? Da li Re(λ) ≤ 0 povlaci numericku stabilnost?
Definicija 3 Oblast apsolutne (linearne) stabilnosti D numericke metode je skup
svih vrednosti hλ ∈ C tako da |yn,h| ≤ K.
Ako primenimo LVM (1) na model-problem MS(λ), dobija se linearna diferencna jednacinasa konstantnim koeficijentima
(6)
k∑
j=0
αjyn+j − h
k∑
j=0
βjyn+j = 0 =⇒k∑
j=0
(αj − hβj
)yn+j = 0,
gde je h = λ h. Uvodjenjem pojma polinoma stabilnosti
π(z, h) = ρ(z)− hσ(z) =k∑
j=0
(αj − hβj
)zm
opste resenje diferencne jednacine (6) zavisi od nula polinoma stabilnosti. Ako su z1, z2, . . . , zs,s ≤ m nule polinoma stabilnosti visestrukosti r1, r2, . . . , rs,
∑si=1 ri = k, tada je opste resenje
diferencne jednacine (6)
(7) yn =s∑
i=1
(ri−1∑
j=0
ci,jnj
)zni ,
pri cemu su konstante ci,j jedinstveno odredjene pocetnim vrednostima y0, y1, . . . , yk−1.Analizom kao i u kod 0−stabilnosti, zakljucujemo da se nestabilnost javlja ako diferencna
jednacina (6) ima neko partikularno resenje yn = Zn, |Z| > 1 sa eksponencijalnim rastom, tkz.”parazitska resenja”.
LVM (1) je apsolutno stabilan u odnosu na MS(λ), za dato h, ako susva resenja {yn} diferencne jednacine (6) ogranicena kada n→ ∞
Definicija 4 LVM je apsolutno stabilan u odnosu na MS(λ) za dato h ako polinom sta-bilnosti nema nula sa modulom vecim od jedinice i ako su sve nule sa modulom jedan proste.
Definicija 5 Ako je LVM apsolutno stabilan za svako h ∈ (h1, h2), interval (h1, h2) naziva seinterval apsolutne stabilnosti LVM.
Uobicajeno je da se zapravo koristi oblast apsolutne stabilnosti ili krace oblast stabilnostikao oblasti u kompleksnoj z−ravni, dopustajuci da je λ ∈ C. Zapravo da vrednosti λ mogu bitikompleksne potice od resavanja sistema DJ y′ = Ay, gde je λ zapravo neka sopstvena vrednost(koja moze biti realna ili kompleksna) konstantne realne matrice A.
5

Definicija 6 Oblast apsolutne stabilnosti D linearne visekoracne metode je skup svihvrednosti h ∈ C za koje je metod apsolutno stabilan.
Za realne vrednosti h imamo interval apsolutne stabilnosti cije su krajnje tacke zapravotacke u kojima rub ∂D oblasti apsolutne stabilnosti sece realnu-osu.
Definicija 7 Numericki metod je A-stabilan ako oblast apsolutne stabilnosti D te metodesadrzi C− tj. ako je
C− = {z ∈ C : Re(z) ≤ 0} ⊂ D .
Ako je linearan KP MS(λ) stabilan , onda ce A-stabilan numericki metod zadrzati stabil-nost i kod pribliznog (numerickog) resenja, odnosno zadrzati isto asimptotsko svojstvo tacnogresenja.
Ono sto sustinski razlikuje pojam 0−stabilnosti i apsolutne stabilnosti je da kod apsolutnestabilnosti sve zavisi od h, odnosno i od konkretnog problema. LVM je za neke vrednosti hapsolutno stabilan, dok je za neke vrednosti h nestabilan. Takodje, pojam 0−stabilnosti jepridruzen model-problemu y′ = 0 tj. problemu MS(λ) za λ = 0, sto terminoloski objasnjavapojam nula-stabilnosti i povezuje ga sa pojmom apsolutne stabilnosti. Mozemo reci da je LVM0−stabilan akko je apsolutno stabilan u odnosu na MS(0).
Kako je π(z, 0) = ρ(z), zakljucujemo da se za h = 0, nule polinoma stabilnosti poklapajusa nulama prvog karakteristicnog polinoma, koje zbog 0−stabinosti leze na jedinicnoj kruzniciili unutar jedinicnog kruga. Zbog konzistentnosti metode w1 = 1 je prosta nula prvog karak-teristicnog polinoma. Neka je z1(h) nula polinoma stabilnosti koja tezi ka w1 kada h → 0, tj.z1(h) → w1, h→ 0.
Lema 1 Ako je p red tacnosti LVM, onda polinom stabilnosti π(z, h) ima nulu z1(h) za kojuvazi
(8) z1(h) = eh +O(hp+1), h→ 0 .
Dokaz: Dokazali smo da je LVM tacnosti reda p akko
(9) π(eh, h) = ρ(eh)− hσ
(eh)= Cp+1h
p+1+O
(hp+2)= O
(hp+1), h→ 0 .
Ako su zi(h), i = 1, 2, . . . , k nule polinoma stabilnosti imamo da je
(10) π(z, h) = (z − z1(h))(z − z2(h)) . . . (z − zk(h)) .
Iz (9) i (10) dobijamo
(11)(eh − z1(h)
)(eh − z2(h)
). . .(eh − zk(h)
)= O
(hp+1), h→ 0 .
Kada h → 0, eh → 1 = w1 i zi(h) → wi, h → 0, i = 1, 2, . . . , k. Zbog 0−stabilnosti w1 = 1 jeprosta nula polinoma ρ(w), tako da jedino prvi cinilac na levoj strani jednakosti (11) tezi nuli.Dakle, vazi (8). ⊠
Prema prethodnoj Lemi, za dovoljno malo pozitivno h, z1(h) > 1, sto znaci da je svakikonzistentan 0−stabilan (konvergentan) metod apsolutno nestabilan za male pozitivne vred-nosti h.
Lema 2 Svaki konzistentan 0−stabilan (konvergentan) metod je apsolutno nestabilan za malepozitivne vrednosti h.
6

Relativna stabilnost
Nula z1(h) polinoma stabilnosti za koju vazi (8) naziva se glavna nula, dok se ostale nulenazivaju parazitske ili sporedne nule polinoma stabilnosti. Glavna nula polinoma stabilnosti jeona koja ce u numerickom resenju reprezentovati tacno resenje
y(x) = eλx → y(xn) = eλ xn = eλnh = enh
model-problema MS(λ), jer glavnoj nuli u opstem resenju diferencne jednacine (6) odgovaraclan
z1(h)n = ehn +O
(hp+1)≈ eλxn
Sporedne nule nemaju nikakve veza sa tacnim resenjem, ali ipak uticu na numericko resenje.Ako za neki koren zi, i = 2, 3, . . . , k polinoma stabilnosti vazi |zi| > |z1|, clan u opstem resenjuzni ce postati dominantan u pribliznom resenju. Kako ta nula nije povezana sa tacnim resenjem,numericko resenje vise nece adekvatno predstavljati tacno resenje, sto dovodi do numerickenestabilnosti. Zato se uvodi jos jedan koncept numericke stabilnosti, po kome se zapravokontrolise relativna greska.
Definicija 8 LVM je relativno stabilan u odnosu na MS(λ) za dato h ako sve nule poli-noma stabilnosti zadovoljavaju uslov |z1| > |zi|, i = 2, 3, . . . , k. Ako je LVM relativno stabilanza svako h ∈ (h1, h2), interval (h1, h2) naziva se interval relativne stabilnosti LVM.
Uslov relativne stabilnosti zapravo znaci da clanovi u opstem resenju odgovarajuci parazi-tiskim korenima opadaju ekponencijalno, ali znatno sporije od resenja koje odgovara glavnojnuli (koje najbrze opada), cime se umanjuje uticaj parazitskih resenja u pribliznom resenju.
S druge strane, ukupna disretizaciona greska zadovoljava diferencnu jednacinu
(12)k∑
j=0
(αj − λ hβn+j)en+j = En+k
cije je opste resenje
(13) en =
s∑
i=1
(ri−1∑
j=0
ci,jnj
)zni − En+k
hσ(1),
gde su zi nule polina stabilnosti π(z, h). Ako je metod relativno stabilan, tj. |z1| > |zi|,i = 2, 3, . . . , k na osnovu (7) i (13) zakljucujemo da greska en i tacno resenje na isti nacinopadaju (ekponencijalno) kada se broj izracunavanja n povecava tj. kada X → ∞. Drugimrecima, relativna greska ostaje ogranicena kada n raste.
Dakle, dok koncept apsolutne stabilnost kontrolise da se greska en ne povecava kada n raste,koncept relativne stabilnosti kontrolise da se yn/en ne povecava kada n raste.
Apsolutna stabilnost LVM ne povlaci relativnu stabilnost, tj. za nule polinoma stabilnostimoze vaziti |zi| ≤ 1, i = 1, 2, . . . , k, ali |z1| < |zi| ≤ 1, i = 2, 3, . . . , k.
Primer 3. Simposonovo pravilo koje je optimalan implicitni dvokoracni metod reda p = 4
yn+2 − yn =h
3(fn+2 + 4fn+1 + fn)
7

je metod koji je relativno stabilan, ali nije apsolutno stabilan. Polinom stabilnosti je
π(z, h) = z2 − 1− h
3(z2 + 4z + 1) =
(1− h
3
)z2 − 4
3h z −
(1 +
h
3
)
Nule prvog karakteristicnog polina ρ(w) = w2 − 1 su w = ±1. Tada je prema (8)
z1(h) = 1 + h+O(h2),
a kako z2(h) → w2 = −1, h→ 0, mora biti
z2(h) = −1 + γh+O(h2)
i kako je π(z2(h), h) = 0 imamo
(1− h
3
)(−1 + γh
)2 − 4
3h(−1 + γh
)−(1 +
h
3
)= O
(h2)
(1− h
3
)(1− 2γh) +
4
3h −
(1 +
h
3
)= O
(h2).
Dakle,
1− 2γh ≈1− h
1− h/3≈ (1− h)
(1 +
h
3+O
(h2))
odakle se dobija da je γ = 1/3. Dakle, za dovoljno malo h je
z1(h) ≈ 1 + h, z2(h) ≈ −1 +h
3
• za h = 0 obe nule su na jedinicnoj kruznici• za h > 0 glavna nula z1(h) je izvan jedinicne kruznice, a sporedna nula z2(h) unutar• za h < 0 glavna nula z1(h) je unutar jedinicne kruznice, a sporedna nula z2(h) izvanDakle, metod nije apsolutno stabilan, ali kako je
∣∣z1(h)∣∣ >
∣∣z2(h)∣∣ za svako h > 0, interval
relativne stabilnosti metode je [0,∞).
Odredjivanje intervala apsolutne stabilnosti
Raus-Hurvicov kriterijum: S obzirom da se transformacijom z = w+11−w
krug|z| < 1 iz z−ravni preslikava na oblast Rew < 0 u w−ravni, problem odredjivanja intervalaapsolutne stabilnosti LVM se moze svesti na ispitivanje da li je polinom
(14) Q(w) = (1− w)k(ρ
(w + 1
1− w
)− hσ
(w + 1
1− w
))= a0w
n + a1wn−1 + . . .+ an−1w + an
Hurwitzov polinom.
8

Lema 3 (Lema Raus–Hurvica) Svi koreni polinoma Q(w) definisanog sa (14) imaju nega-tivan realni deo ako i samo ako su pozitivni svi glavni dijagonalni minori matrice Hurvica
a1 a0 0 0 0 0 . . . 0a3 a2 a1 a0 0 0 0a5 a4 a3 a2 a1 a0 0...0 0 0 0 0 0 an
.
Potreban i dovoljan uslov da nule polinoma (14) leze u levoj poluravni tj. da je Re(w) < 0,odnosno da koreni polinoma stabilnosti π(z, h) leze unutar jedinicne kruznice |z| < 1 je da sviglavni dijagonalni minori
∆1 = a1, ∆2 =
∣∣∣∣a1 a0a3 a2
∣∣∣∣ , ∆3 =
∣∣∣∣∣∣
a1 a0 0a3 a2 a1a5 a4 a3
∣∣∣∣∣∣, . . .
budu pozitivni. Kako je ∆n = an∆n−1, uslov ∆n > 0 moze biti zamenjen uslovom an > 0.Dakle,
n = 2 : a0 > 0, a1 > 0, a2 > 0
n = 3 : a0 > 0, a1 > 0, a2 > 0, a3 > 0, a1a2 − a3a0 > 0
Primer 4. Odredimo interval apsolutne stabilnosti metoda
yn+2 − yn =h
2(fn+1 + 3fn) .
Polinom stabilnosti je
π(z, h) = z2 − h
2z −
(1 +
3h
2
)
i uvodjenjem transformacije z = w+11−w
dobija se polinom
Q(w) = (1− w)2
[(w + 1
1− w
)2
− h
2
w + 1
1− w−(1 +
3h
2
)]= a0w
2 + a1w + a2,
gde jea0 = −h, a1 = 4 + 3h, a2 = −2h .
Raus-Hurvisov kriterijum je zadovoljen akko h ∈(−4
3, 0
)= I.
9

Oblasti apsolutne stabilnosti osnovnih LVM
Odredimo oblasti apsolutne stabilnosti osnovnih visekoracnih metoda:
(I) Eksplicitni Ojlerov metod: polinom stabilnosti je
π(z, h) = z − 1− h = z − (1 + h) = 0 ⇔ z = 1 + h
(15) IEOM = (−2, 0)
(16) DEOM = {z ∈ C : |z + 1| < 1} (Slika 8-(a))
Kod primene eksplicitnog Ojlerovog metoda, h mora biti sto manje ne da bi dobili sto manjuukupnu disretizacionu gresku, vec da bi metod bio apsolutno stabilan!!
(a) Eksplicitni Ojlerov metod (b) Implicitni Ojlerovog metod
Slika 8: Oblast apsolutne stabilnosti eksplicitnog i implicitnog Ojlerovog metoda
(II) Implicitni Ojlerov metod: polinom stabilnosti je
π(z, h) = z − 1− h z = (1− h)z − 1 = 0 ⇔ z =(1− h
)−1
−1 ≤ 1
1− h≤ 1 ⇔ h ≤ 0 ∨ h ≥ 2
IIOM = (−∞, 0), DIOM = {z ∈ C : |z − 1| > 1} (Slika 8-(b))
(III) Trapezna formula: polinom stabilnosti je
π(z, h) = z − 1− h
2(z + 1) =
(1− h
2
)z −
(1 +
h
2
)= 0 ⇔ z =
h+ 2
2− h
Kako je ∣∣∣∣h+ 2
2− h
∣∣∣∣ ≤ 1 ⇒∣∣h− (−2)
∣∣ ≤∣∣h− 2
∣∣
10

D je skup svih tacaka z u kompleksnoj ravni koje su blize −2 nego do 2, tj. za koje je Re(z) ≤ 0(leva poluravan - videti Sliku 9-(a)):
DTF = {z ∈ C : Re(z) ≤ 0} . (Slika 9-(a))
Zapravo, kako je
−1 ≤ h+ 2
2− h≤ 1 ⇔ h ≤ 0
interval apsolutne stabilnosti jeITF = (−∞, 0) .
Dakle, trapezna formula ne zahteva ma kakvo ogranicenje u izboru koraka h da bi se izbeglanestabilnost metode. Ovo naravno ne znaci da se moze uzeti bilo koje h. Neophodno je izabratih > 0 dovoljno malo da bi dobili zadovoljavajucu lokalnu i ukupnu gresku diskretizacije. Drugimrecima, za trapezno pravilo h mora biti sto manje da bi dobili sto manju ukupnu disretizacionugresku, a ne da bi obezbedili stabilnost metode !!
(a) Trapezna formula (b) Metod srednje tacke
Slika 9: Oblast apsolutne stabilnosti trapeznog pravila i metoda srednje tacke
(IV) Metod srednje tacke: polinom stabilnosti je
(17) π(z, h) = z2 − 1− hz = 0 ⇔ z± = h±√h2+ 1 .
Prema tome, za h > 0 je z+ > 1 i −1 < z− < 0, dok za h < 0 je 0 < z+ < 1 i z− < −1.Ako je h = 0, imamo z± = ±1. Dakle IMST = ∅. Za apsolutnu stabilnost moramo imati|z+| = |z−| = 1 , tj. obe nule polinoma stabilnosti moraju biti na jedinicnoj kruznici, stoce vaziti akko h ∈ [−i, i]. Pri tome, h 6= ±i, jer u suprotnom bi imali polinom stabilnostiπ(z, h) = (z ± i)2 cije su nule z+ = z− = ±i, tj. imali bi visestruku nulu na jedinicnom krugu.Dakle, oblast apsolutne stabilnosti je
DMST = {z ∈ C : z = bi,−1 < b < 1} (Slika 9-(b))
ZAKLJUCAK: Implicitni Ojlerov metod i trapezna formula suA-stabilne metode, dok eksplicitni Ojlerov metod i metod srednjetacke nisu A-stabilni metodi.
11
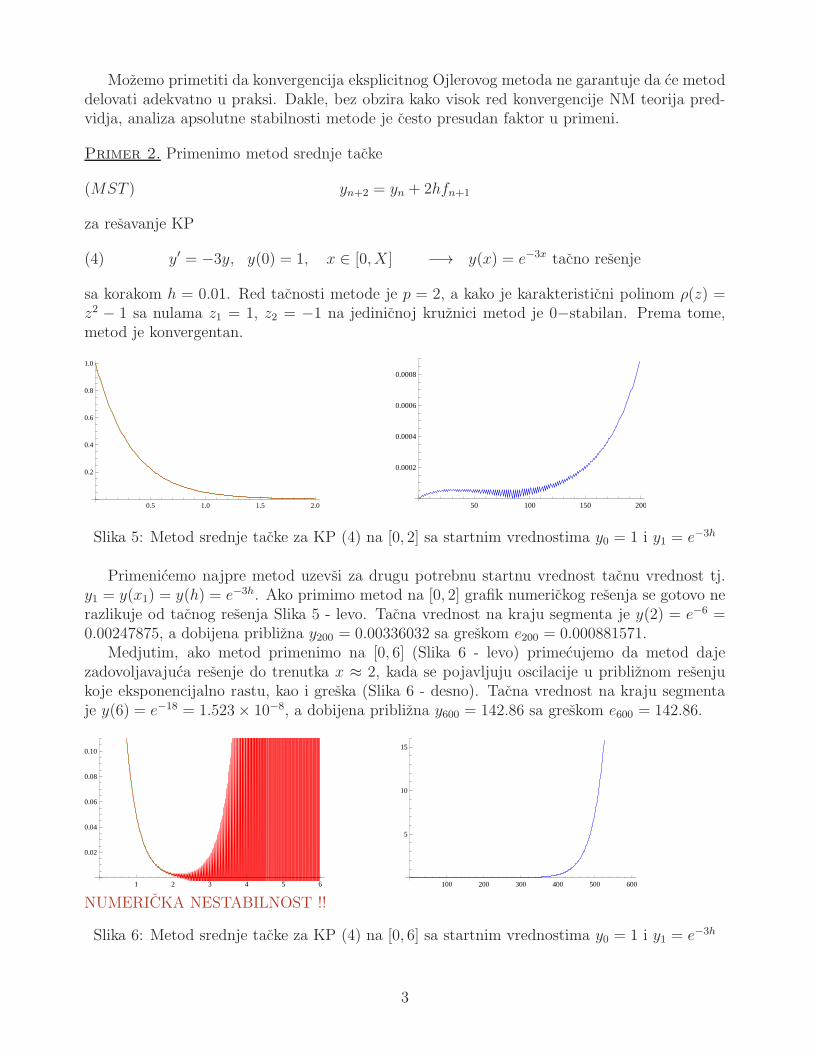
Drugim recima, kod A-stabilnog LVM korak h mozemo izabrati SAMO u zavisnosti odcinjenice koliku tacnost pribliznih resenja zelimo, ne vodeci racuna o ogranicenjima stabilnosti.
Apsolutna stabilnost eksplicitnog Ojlerovog metoda
Da bi ilustrovali apsolutnu stabilnost EO-metoda primenimo ga na model-problem MS(λ)na [0, 1] sa korakom h = 1/8 za vrednosti λ = −2l, l = 0, 1, 2, 3, 4. Priblizna resenja prikazanasu na Slici 10. Tacno resenje je y(x) = eλx.
0.2 0.4 0.6 0.8 1.0
-1.0
0.0
0.5
1.0
Slika 10: Eksplicitni Ojlerov metod na linearnom model-problemuMS(λ) za h = 1/8 i λ = −2l, l = 0, 1, 2, 3, 4
EO-metod na model-problemu MS(λ) je oblika
(18) yn+1 = yn + h · λ yn = (1 + h)yn, n = 0, 1, 2, . . . h = hλ
⇓yn =
(1 + h
)ny0 =
(1 + h
)n
Kako je tacno resenje model-problema y(x) = eλx, dobija se
(19) y(xn+1) = y(xn)eλh .
Iz (18) i (19) imamo za ukupnu diskretizacionu gresku
yn+1 = (1 + λ h)yn = (1 + λ h)(y(xn) + en)
⇓en+1 = yn+1 − y(xn+1) = (1 + λ h)y(xn) + (1 + λ h)en − y(xn)e
λh
⇓
(20) en+1 = (1 + λ h− eλh)y(xn) + (1 + λ h)en = O(h2)y(xn) + (1 + λ h)en
Kako je e0 = 0, e1 = O(h2)y(x1) = O(h2)eλh 6= 0, bice
en+1 ≈ (1 + λ h)ne1
12

Prvi sabirak na desnoj strani (20) daje lokalnu gresku odsecanja EO, dok drugi sabirak pred-stavlja gresku koja se akumulira u toku izracunavanja i objasnjava ekponencijalni rast greskeu procesu izracunavanja. Ako je |1 + λ h| > 1, imacemo da en → ∞, n → ∞, odnosno greskasa kojom cemo uci u izracunavanje u nekom koraku m uvecace se za faktor (1+ λ h)n−m nakonjos n koraka izracunavanja. Greska u procesu izracunavanja se nece povecavati, odnosno EOmetod je apsolutno stabilan za |1+hλ| < 1, sto predstavlja jedinicni krug sa centrom u (−1, 0)u hλ−kompleksnoj ravni.
Analizirajmo neke konkretne primer:
(A) Ako bi npr. uzeli λ = −2100 i h = 10−3, primenili EOM na model-problemu MS(λ)na segmentu [0, 1], dobili bi za y(1) ≈ 2.46993 × 1041 sa greskom e1000 = 2.46993 × 1041 -tacna vrednosti je y(1) = 9.58490920236× 10−913. Kako je 1 + hλ = −1.1, prema (20) trebaocekivati da ce se nakon N = 1/h = 1000 koraka lokalna greska odsecanja iz prvog korakaizracunavanja uvecati do kraja izracunavanja do faktora (−1.1)1000 = 2.46993 × 1041, sto jeupravo u saglasnosti sa dobijenim rezultatima. Da bi postigli apsolutnu stabilnost u ovomprimeru korak h moramo izabrati da bude 1 + hλ > −1 ⇔ h < 0.000952381. Za razlicitevrednosti koraka h vrednosti greske na kraju izracunavanja date su u sledecoj tabeli:
h priblizno resenje tacno resenje greska EOM
h = 0.001 2.46993× 1041 9.5849092× 10−912 2.46993× 1041
h = 0.00096 −1.50089× 107 3.6751899× 10−912 −1.50089× 107
h = 0.000955 −311.912 1.22030986× 10−912 −311.912h = 0.000954 35.0633 1.4835× 10−912 35.0633h = 0.000952 0.431565 2.2202167× 10−912 0.431565h = 0.00095 0.00512721 3.37908448× 10−912 0.00512721h = 0.0008 4.32654× 10−210 9.5849092× 10−913 4.32654× 10−210
(B) U primeni kod model-problema MS(λ) za vrednosti λ ∈ {−1,−2,−4,−8} tj. h = λ h ∈{−1/8,−1/4,−1/2,−1} EOM daje odgovarajuce priblizno resenje. Medjutim za λ = −16, tj.h = hλ = −2 je yn = (1 + h
)ny0 = (−1)n, pa priblizno resenje oscilira, sto se vidi sa Slike 10.
Za λ < 0 tacno resenje y(x) = y0eλx tezi nuli kada x → ∞. Numericko resenje dobijeno EOM
ce imati isto asimptotsko ponasanje ako je
|1 + hλ| < 1 ⇔ −2 < hλ < 0 ⇔ h <2
|λ|sto potvrdjuje da je interval apsolutne stablinosti eksplicitnog Ojlerovog metoda odredjen sa(15), kao i pojavu nestabilnosti na Slici 10 za λ = −24, jer je
h =1
8=
2
|λ| =1
23⇒ h =
1
8/∈ IEOM .
(C) Vratimo se sada na Primer 1. Tacno resenje KP (3) je yP (x) = sin x, dok je resenjeodgovarajuce homogene DJ yH(t) = eµ x, a resenje koje prolazi kroz proizvoljnu tacku (x0, y0)je y(x) = eµ(x−x0)(y0 − sin x0) + sin x. Kako razlika (δu)(t) = y(x) − yP (x) zadovoljava lin-earnu DJ sa konstantnim koeficijntima (δu)′(t) = µ(δu)(t), analiza stabilnosti resenja linearnenehomogene DJ (3) nas vraca na analizu linearnog model-problema MS(µ).
Za koeficijent µ = −10, resenje odgovarajuce homogene DJ yH(t) ima dominantan uticajna integralne krive DJ koje prolaze kroz proizvoljne pocetne tacke (Slika 11). Naime, sve
13

Slika 11: Ponasanje integralnih krivih KP: y′ = µ(y − sin x) + cosx, y(x0) = y0 i Kosijevoresenje yP (x) = sin x za y(π/4) =
√2/2
integralne krive se vrlo brzo (u vremenskom periodu od ≈ 0.1) spustaju ka krivoj y(x) = sin x.Ovo predstavlja jednu od osnovnih obelezja krutih problema: kada se resenja KP brzo menjajuiako se to ne desava sa resenjem koje priblizno trazimo.
EOM u Primeru 1. za µ = −10 ce biti apsolutno stabilan za izbor koraka 0 < h < − 2µ= 0.2,
tj. h ∈ I = (0, 0.2). Dakle, h1 = π/10 ≈ 0.314159 6∈ I, h2 = π/20 ≈ 0.15708 ∈ I, stoobjasnjava pojavu nestabilnosti na Slici 4.
PITANJE: Kako je eksplicitni Ojlerov metod konvergentan, da li uoceni eksponencijalni rastgreske kontraprimer Fundamentalne teoreme numericke analize (0−stabilnost + konzistentnost= konvergencija)?
ODGOVOR: NE!! EOM je konvergentan kada h → 0 - samo korak moramo izbrati jakomalo da bi postigli konvergenciju. Naime, u dokazu konvergencije smo dobili ocenu ukupnediskretizacione greske
||en,h|| ≤c
L[f ]
[(eL[f ](X−x0) − 1
], n = 0, 1, 2, . . . , [(X − x0)/h].
koja dopusta mogucnost ekponencijalnog rasta greske sa povecanjem X ≫ x0 odnosno sapovecanjem n.
Apsolutna stabilnost pravila srednje tacke
Metod srednje tacke na model-problemu MS(λ) je oblika
(21) yn+1 = yn−1 + 2h yn, n = 1, 2, . . . h = hλ .
Opste resenje ove linearne diferencne jednacine je yn = c1zn+ + c2z
n−, gde su z± = h±
√h2+ 1
koreni polinoma stabilnosti. Kako je
(22) z+ = h+
√h2+ 1 = 1+h+
h2
2+O
(h4)= eh− h
3
6+O
(h4)= eh+O
(h3)
⇒ z+ ≈ eh
i z+z− = −1 bice z− ≈ −e−h. Primetimo, da je (22) u saglasnosti sa (8), jer je metod srednjetacke reda tacnosti p = 2. Dobijamo da je priblizno resenje
yn ≈ c1enh + c2(−1)ne−nh = c1e
λxn + c2(−1)ne−λxn .
14
Prvi sabirak odgovara tacnom resenju, dok ce drugi sabirak kada je λ < 0, za velike vrednostin dovesti do ekponencijalnog rasta i oscilovanja niza pribliznih resenja. Za λ < 0 kada jetacno resenje eksponencijalna opadajuca funkcija, metod srednje tacke primenjen na linearnommodel-problemu je nestabilan bez obzira kako malo h uzeli dok god je c2 6= 0. Kako je kodmodel-problema 1 = y0 = c1 + c2 i y1 = c1z+ + c2z− imamo da je
c2 =y1 − z+z− − z+
6= 0 za y1 6= z+ .
Naime, ako startnu vrednost y1 odredimo npr. EO-metodom imamo
y0 = c1 + c2 (1 + h)y0 = y1 = c1z+ + c2z−
⇓
(1 + h)c1 + (1 + h)c2 = c1
(h+
√h2+ 1
)+ c2
(h−
√h2+ 1
)
Ako bi c2 = 0, imali bi da je 1 =
√h2+ 1, sto vazi samo ako je h = 0. Prema tome, ako
startnu vrednost y1 odredimo npr. EO-metodom mora biti c2 6= 0, sto dovodi do numerickenestabilnosti metoda srednje tacke.
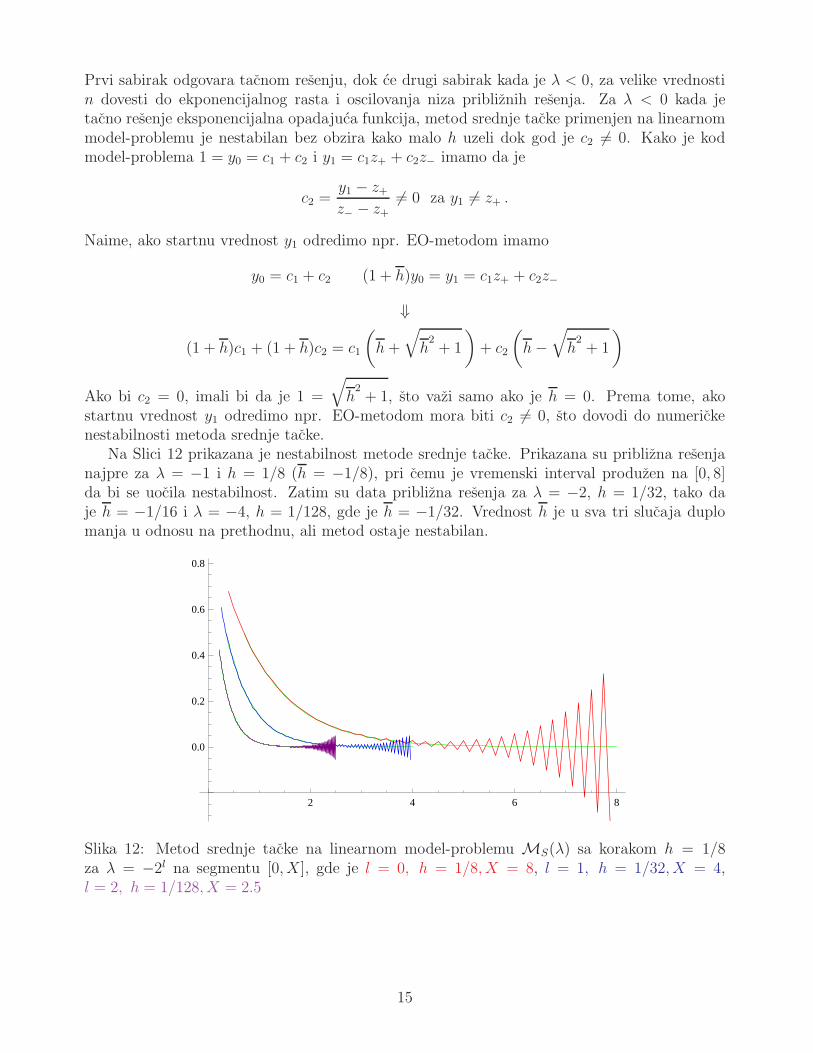
Na Slici 12 prikazana je nestabilnost metode srednje tacke. Prikazana su priblizna resenjanajpre za λ = −1 i h = 1/8 (h = −1/8), pri cemu je vremenski interval produzen na [0, 8]da bi se uocila nestabilnost. Zatim su data priblizna resenja za λ = −2, h = 1/32, tako daje h = −1/16 i λ = −4, h = 1/128, gde je h = −1/32. Vrednost h je u sva tri slucaja duplomanja u odnosu na prethodnu, ali metod ostaje nestabilan.
2 4 6 8
0.0
0.2
0.4
0.6
0.8
Slika 12: Metod srednje tacke na linearnom model-problemu MS(λ) sa korakom h = 1/8za λ = −2l na segmentu [0, X ], gde je l = 0, h = 1/8, X = 8, l = 1, h = 1/32, X = 4,l = 2, h = 1/128, X = 2.5
15
Apsolutna stabilnost trapezne formule
Trapezna formula na model-problemu MS(λ) je oblika
yn+1 = yn +h
2(λyn+1 + λyn) .
⇓(1− h
2
)yn+1 =
(1 +
h
2
)yn ⇒ yn+1 =
1 + h2
1− h2
yn
⇓
yn =
(1 + h
2
1− h2
)n
y0 =
(2 + h
2− h
)n
y0
⇓
DTF =
{z ∈ C :
∣∣∣∣2 + h
2− h
∣∣∣∣ < 1
}= {z ∈ C : Re(z) ≤ 0}
Trapezna formula je kao sto smo vec pokazali A-stabilan LVM.
0.2 0.4 0.6 0.8 1.0-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
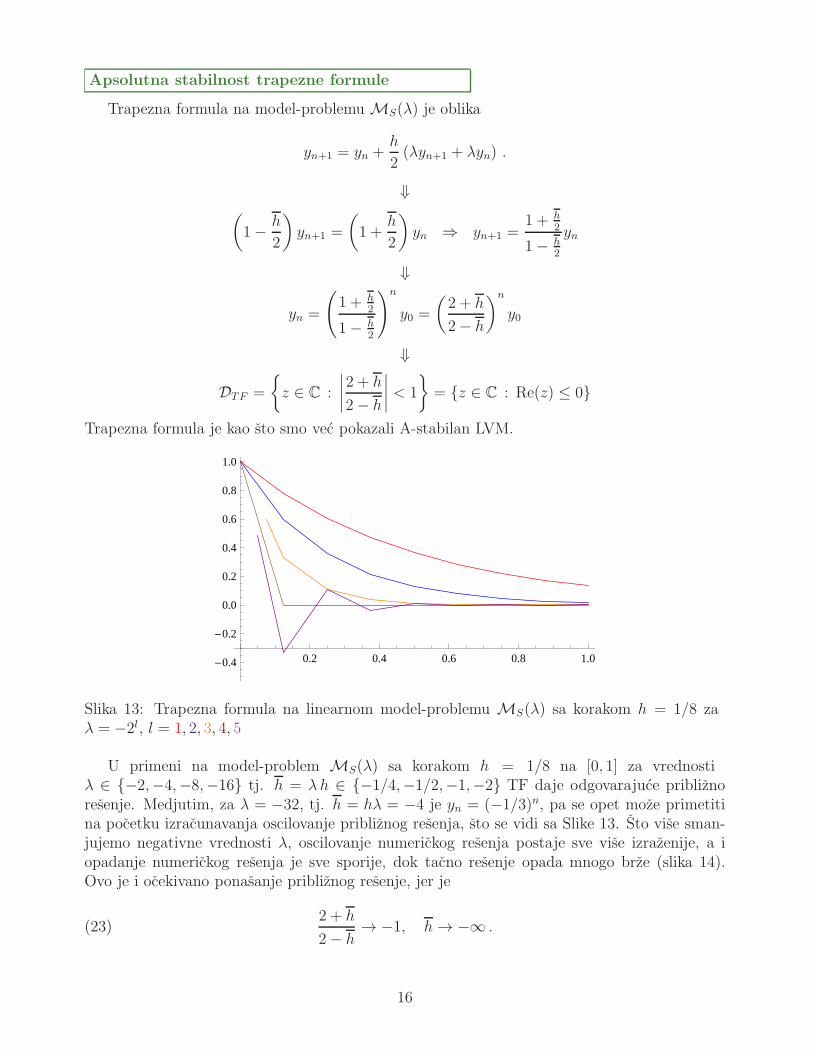
Slika 13: Trapezna formula na linearnom model-problemu MS(λ) sa korakom h = 1/8 zaλ = −2l, l = 1, 2, 3, 4, 5
U primeni na model-problem MS(λ) sa korakom h = 1/8 na [0, 1] za vrednostiλ ∈ {−2,−4,−8,−16} tj. h = λ h ∈ {−1/4,−1/2,−1,−2} TF daje odgovarajuce pribliznoresenje. Medjutim, za λ = −32, tj. h = hλ = −4 je yn = (−1/3)n, pa se opet moze primetitina pocetku izracunavanja oscilovanje pribliznog resenja, sto se vidi sa Slike 13. Sto vise sman-jujemo negativne vrednosti λ, oscilovanje numerickog resenja postaje sve vise izrazenije, a iopadanje numerickog resenja je sve sporije, dok tacno resenje opada mnogo brze (slika 14).Ovo je i ocekivano ponasanje pribliznog resenje, jer je
(23)2 + h
2− h→ −1, h→ −∞ .
16
1 2 3 4
-1.0
-0.5
0.5
1.0
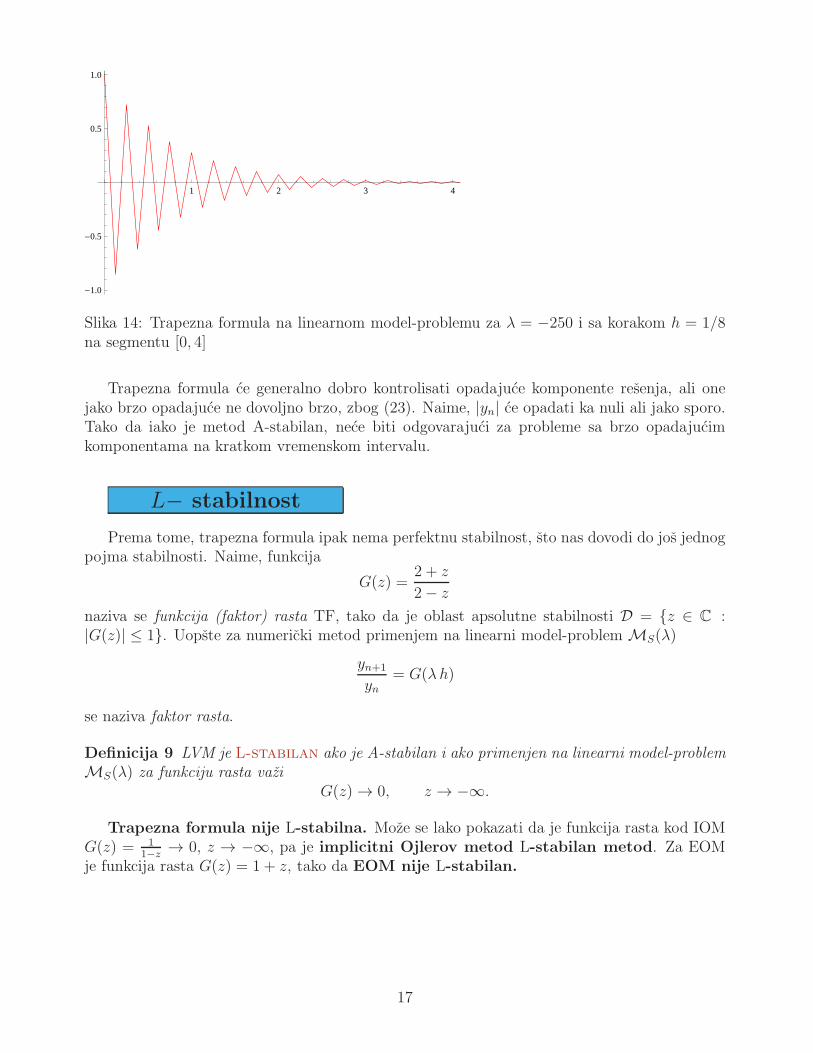
Slika 14: Trapezna formula na linearnom model-problemu za λ = −250 i sa korakom h = 1/8na segmentu [0, 4]
Trapezna formula ce generalno dobro kontrolisati opadajuce komponente resenja, ali onejako brzo opadajuce ne dovoljno brzo, zbog (23). Naime, |yn| ce opadati ka nuli ali jako sporo.Tako da iako je metod A-stabilan, nece biti odgovarajuci za probleme sa brzo opadajucimkomponentama na kratkom vremenskom intervalu.
L− stabilnost
Prema tome, trapezna formula ipak nema perfektnu stabilnost, sto nas dovodi do jos jednogpojma stabilnosti. Naime, funkcija
G(z) =2 + z
2− z
naziva se funkcija (faktor) rasta TF, tako da je oblast apsolutne stabilnosti D = {z ∈ C :|G(z)| ≤ 1}. Uopste za numericki metod primenjem na linearni model-problem MS(λ)
yn+1
yn= G(λ h)
se naziva faktor rasta.
Definicija 9 LVM je L-stabilan ako je A-stabilan i ako primenjen na linearni model-problemMS(λ) za funkciju rasta vazi
G(z) → 0, z → −∞.
Trapezna formula nije L-stabilna. Moze se lako pokazati da je funkcija rasta kod IOMG(z) = 1
1−z→ 0, z → −∞, pa je implicitni Ojlerov metod L-stabilan metod. Za EOM
je funkcija rasta G(z) = 1 + z, tako da EOM nije L-stabilan.
17

Problem krutosti
Kao sto prethodni primeri pokazuju, bez obzira kako neki NM imao visok red tacnosti,u primeni na odredjene KP korak h se mora izabrati dovoljno malim da bi zadovoljili uslovapsolutne stabilnosti metode. Upravo, ako nam uslov apsolutne stabilnosti diktira izbor korakah, a ne red tacnosti koju zelimo da postignemo za problem kazemo da je krut. KP (3), (4) suprimeri krutih diferencijalnih jednacina.
Problem krutosti se ne moze precizno matematicki definisati, ali ga sledece tri pojave na-jbolje opisuju:
(1) do krutosti dolazi kada jedna komponenta resenja opada daleko brze od ostalih
(2) fenomen krutosti se javlja kada je korak h odredjen uslovom stabilnosti, a ne redomkonvergencije i tacnosti metode: ako je vrednost koraka ht potrebna da bi dobili pribliznoresenje odgovarajuce tacnosti mnogo veca od vrednosti koraka hs koja je potreba da bi sprecilinekontrolisani rast greske u izracunavanju. Za uspesno izracunavanje moramo izabrati korakhs ≪ ht.
(3) fenomen krutosti se javlja kada eksplicitni metodi ”ne rade”: Kako eksplicitni LVMuvek imaju ogranicene oblasti stabilnosti, resavanje krutih problema ovim metodama zahtevakoriscenje jako malih vrednosti koraka h. Za bolje rezultate koriste se implicitne LVM saneogranicenim oblastima stabilnosti.
Kruti sistemi DJ koji se vrlo cesto javljaju u primenama (u hemijskoj kinetici - grani fizicke-hemije koja se bavi vremenskim aspektom hemijskih procesa, mehanici cvrstih tela, vremenskojprognozi, control theory, elektronici itd.) Jedan od klasicnih predstavnika krutih sistem DJ jeRobertsonov model hemijske reakcije:
x′ = −0.04x+ 104 y z x(0) = 1
y′ = 0.04x− 104 y z − 3 · 107y2 y(0) = 0
z′ = 3 · 107y2 z(0) = 0
Da bi resili krute probleme potrebne su nam NM sa sto vecom oblasti apsolutne stabilnosti.Vazno je naglasiti da ne postoji NM koji je univerzalno bolji od ostalih i da izbor efikasne NMzavisi od pazljivog razmatranja Kosijevog problema koji se resava, tacnosti pribliznih resenjakoja nam je potrebna.
Kruti sistemi DJ
Problem krutosti je najuocljiviji u resavanju KP sistema DJ (odnosno DJ viseg reda), kojise najcesce javljaju u primenama.
Primer 5. Primenimo eksplicitni Ojlerov metod na resavanje sistema DJ
y′ = Ay, y(0) = y0 =
(y1y2
), A =
[−100 10 −1/10
].
Odredimo najpre tacno resenje. Sopstevene vrednosti matrice A su λ1 = −100, λ2 = −1/10 saodgovarajucim sopstvenim vektorima v1 = (1, 0), v2 = (10/999, 1). Tada je A = TJT−1 gde je
T =
[1 10
999
0 1
], J =
[−100 00 −1/10
]i eJ t =
[e−100t 00 e−t/10
],
18

pa je Kosijevo resenje sistema
y(t) = TeJtT−1y0 =
[e−100ty1 +
10999
(e−t/10 − e−100t
)y2
e−t/10 y2
]
odnosno postoje konstantni vektori γ1, γ2 koji zavise od y0 tako da
y(t) = e−100tγ1 + e−t/10γ2 .
Funkcija g1(t) = e−100t opada jako brzo:
g1(1/10) ≈ 4.54× 10−5, g1(1) ≈ 3.72× 10−44
dok je funkcija g2(t) = e−t/10 opadajuca, ali daleko sporije. Zato, cak i za malo t > 0, uticaj γ1je beznacajan, tako da y(t) ≈ e−t/10γ2.
Primenom EOM dobija se
y1 = y0 + hAy0 = (I + hA)y0
y2 = y1 + hAy1 = (I + hA)y1 = (I + hA)2y0
...
yn = (I + hA)ny0, n = 0, 1, 2, · · ·⇓ A = TJT−1 ⇒ Ak = TJkT−1
yn = T (I + hJ)nT−1y0, n = 0, 1, 2, · · ·
i kako je
(I + hJ)n =
((1− 100h)n 0
0 (1− 110h)n
)
⇓
(24) yn = (1− 100h)nγ1 +(1− 1
10h)nγ2, n = 0, 1, 2, · · ·
Ako je h > 1/50, tada je 1 − h/10 < 499500
< 1, ali je 1 − 100h < −1, tako da iz (24), zadovoljno veliko n i za γ1 6= 0, duz pravca γ1 niz {yn} je rastuci geometrijski niz. U tom slucaju,NM je zapravo generisala ”parazitska” resenja cije je ponasanje ocigledno u suprotnosti saasimptotskim ponasanjem tacnog resenja koje je opadajuca funkcija ka nuli.
Posmatrajmo linearni sistem DJ
(25) y′(t) = Ay(t) + g(t), y(t0) = y0
u kojem d × d konstanta matrica A ima proste sopstvene vrednosti λ1, λ2, . . . , λd sa odgo-varajucim sopstvenim vektorima v1, v2, . . . , vd. Opste resenje sistema DJ (25) je
y(t) =
d∑
i=1
cieλi tvi + ψ(t) .
y(t) → ψ(t) kada t → ∞ ako su Re(λi) < 0 za svako i = 1, 2, . . . , d. Brzina opadanja resenjaeλi t u smeru sopstvenog vektora vi zavisi od vrednosti Re(λi). Ako je neki Re(λi) < 0 blize
19

nuli, trebace veliko t > 0 dok ta komponenta ne bude dovoljno mala. Ako zelimo numerickidobiti polozaj ravnoteze, onda NM moramo primeniti na [t0, T ] za dovoljno veliko T dok sesvi sabirci eλi t u opstem resenju ne priblize nuli. Brzina najsporije opadajuce komponente jeodredjena sa m = mini
∣∣Re(λi)∣∣ - sto je taj broj manji (tj. sto je neka sopstvena vrednost
bliza imaginarnoj osi) to ce vremenski interval [t0, T ] na kome primenjujemo NM biti sve veci,odnosno bice potrebno vise koraka metode n = 0, 1, . . . , N , N = T−t0
h. S druge strane, sto je
broj M = maxi∣∣Re(λi)
∣∣ veci, trebace nam manji korak h, da bi vrednost h = hM bila u oblastiapsolutne stabilnosti NM. Sve zajedno, u najgoroj situaciji smo ako moramo numericki resitisistem DJ na velikom intervalu sa jako malim korakom !!
Linearni sistem DJ (25) je krut ako su sve sopstvene vrednosti λi, i = 1, 2, . . . , d u levojpoluravni (Re(λi) < 0) i ako je
Sr =M
m=
maxi∣∣Re(λi)
∣∣mini
∣∣Re(λi)∣∣ ≫ 1
Broj Sr naziva se kolicnik krutosti.Linearni sistem DJ (25) je krut na segmentu [t0, T ] ako su sve sopstvene vrednosti λi,
i = 1, 2, . . . , d u levoj poluravni (Re(λi) < 0) i ako je
M(T − t0) ≫ 1 .
Naime, vrlo cesto se duzina intervala ne uzima u obzir, mada postoje primeri kada male vred-nosti M dovode do krutosti sistema jer je vremenski interval veliki. S druge strane, postojeprimeri da obrnuto ne vazi, tj. u dinamici fluida ili za vodeni cekic u nuklearnim reaktorima(koji sluzi za hladjenje reaktora) pojavljuju se sistemi DJ sa jako velikim M , koji se medju-tim resavaju bez problema eksplicitnim metodama na vremenskim intervalima koji se meri umilisekundama − dakle nisu kruti.
Sistemi DJ koji se srecu u primenama su vrlo cesto sa jako velikim kolicnikom krutosti - uhemijskim reakcijama je npr. Sr ≈ 1017, a najveci kolicnik krutosti cak Sr ≈ 1031 se pojavljujeu kosmoligiju u jednacinama koje opisuju Veliki prasak.
Za uspesnu primenu NM u resavanju krutih sistema, korak h se mora izabrati dovoljno maloda sve sopstvene vrednosti λj matrice A vrednosti hj = hλj leze u oblasti apsolutne stabilnostimetode. Ako je metod A-stabilan, u primeni na krute sisteme, bez obzira kako je veliko M ,korak h se moze birati samo u zavisnosti od potrebne tacnosti pribliznog resenja i bez bilokakvog ogranicenja stabilnosti.
20
Oblasti stabilnosti karakteristicnih LVM
Primer 6. Primenicemo Adamas-Bashforthov metod drugog reda (AB2)
(AB2) yn+2 = yn+1 + h
(3
2fn+1 −
1
2fn
),
i BDF-2 metod
(BDF2) yn+2 =4
3yn+1 −
1
3yn +
2h
3fn+2,
na resavanje KP
(26) y′ = −100(y − cosx)− sin x, y(0) = 1, x ∈ [0, 1] −→ tacno resenje: y(x) = cosx
U tabeli su date priblizne vrednosti za y(1) = cos(1) ∼ 0.540302306 odredjene ovim metodama:
h h AB2 greska BDF2 greska
h = 0.2 h = 20 14.4033 13.863 0.540401 0.0000989983
h = 0.1 h = 10 -56956.9 56957.4 0.540329 0.0000263986
h = 0.05 h = 5 −1.90885× 109 1.90885× 109 0.540309 6.78901× 10−6
h = 0.02 h = 2 −5.76929× 1010 5.76929× 1010 0.540303 1.10352× 10−6
h = 0.01 h = 1 0.540302 3.47489× 10−7 0.540303 2.7728× 10−7
h = 0.005 h = 1/2 0.540302 8.69089× 10−8 0.540302 6.94933× 10−8
Mozemo primetiti da se BDF2-metod ponasa korektno, kvadratno konvergira. Medjutim AB2-metod za vrednosti koraka h > 0.01 daje potpuno pogresna priblizna resenja sa ogromnomgreskom. Tek kada h postane dovoljno malo tj. h ≤ 0.01 AB2-metod pocenje da se ponasakorektno. Dakle, AB2-metod je neupotrebljiv za resavanje ovog KP za h > 0.01. Naravnopostavlja se pitanje, sta ako je dovoljno postici tacnost do na drugu ili trecu decimalu? SaAB2-metodom takav zahtev nece biti zadovoljen, jer h mora biti jako malo da bi obezbedilistabilnost metode, sto automatski dovodi do tacnosti minimalno do na sedmu decimalu !!
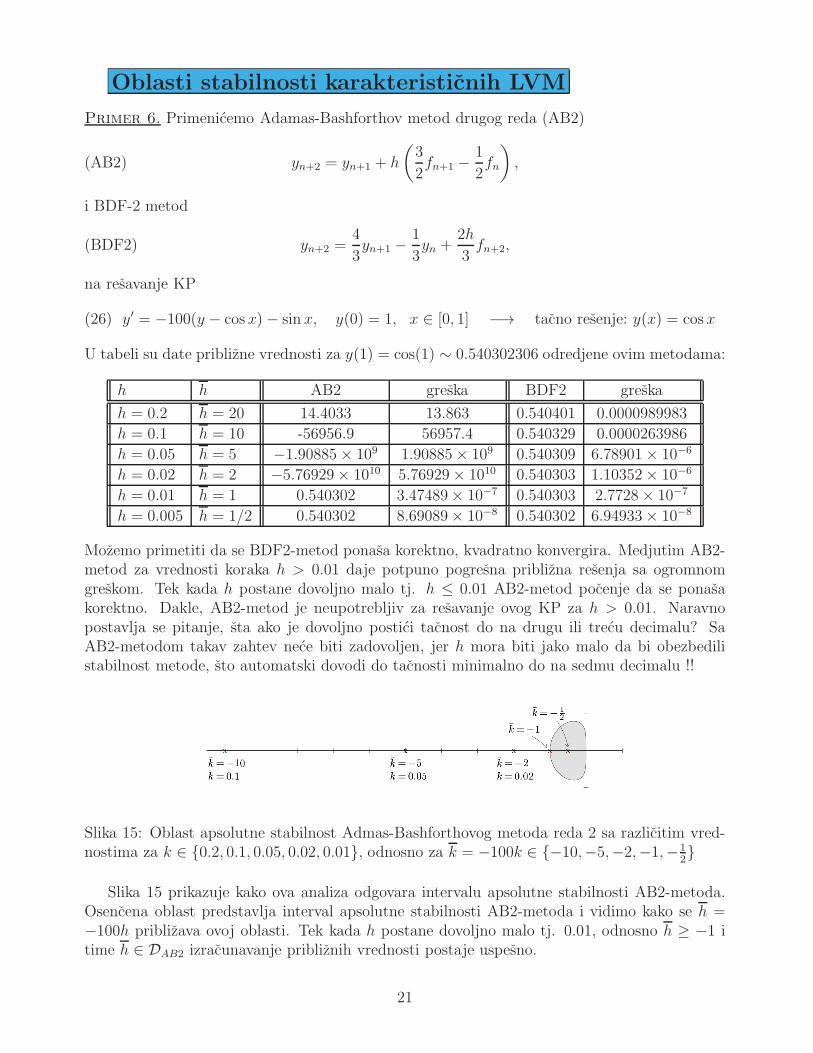
Slika 15: Oblast apsolutne stabilnost Admas-Bashforthovog metoda reda 2 sa razlicitim vred-nostima za k ∈ {0.2, 0.1, 0.05, 0.02, 0.01}, odnosno za k = −100k ∈ {−10,−5,−2,−1,−1
2}
Slika 15 prikazuje kako ova analiza odgovara intervalu apsolutne stabilnosti AB2-metoda.Osencena oblast predstavlja interval apsolutne stabilnosti AB2-metoda i vidimo kako se h =−100h priblizava ovoj oblasti. Tek kada h postane dovoljno malo tj. 0.01, odnosno h ≥ −1 itime h ∈ DAB2 izracunavanje pribliznih vrednosti postaje uspesno.
21

Crtanje oblasti apsolutne stabilnosti se najcesce vrsi odredjivanjem geometrijskogmesta tacaka rubne krive. Naime, kako su nule polinom stabilnosti π(z, h) neprekidne funkcijeod h, h pripada granici oblasti stabilnosti, ako sve nule polinoma stabilnosti leze na jedinicnojkruznici. Nule su oblika wj(h) = eiθ za neko θ ∈ [0, 2π], pa vazi
(27) ρ(eiθ)− hσ(eiθ) = 0 ⇒ h =ρ(eiθ)
σ(eiθ).
Kako je svako h ∈ D oblika (27) za neko θ ∈ [0, 2π], kriva parametarski zadata sa
G(θ) = ρ(eiθ)
σ(eiθ), 0 ≤ θ ≤ 2π
je geometrijsko mesto tacaka koje su potencijalno na rubu oblasti stabilnosti D.
Primer 7. Odredimo oblast apsolutne stabilnosti metoda
yn+2 − yn =h
2(fn+1 + 3fn)
Kako je ρ(w) = w2 − 1, σ(w) = w+32, imamo
G(θ) = ρ(eiθ)
σ(eiθ)= 2
e2iθ − 1
eiθ + 3=
3(cos 2θ − 1) + i(3 sin 2θ + 2 sin θ)
5 + 3 cos θ, 0 ≤ θ ≤ 2π
-0.5 0.5 1.0
-0.6
-0.4
-0.2
0.2
0.4
0.6
Slika 16: Kriva ruba ∂D oblasti apsolutne stabilnosti LVM yn+2 − yn = h2(fn+1 + 3fn)
Kriva parameatrski zadata sa
x =3(cos 2θ − 1)
5 + 3 cos θ
y =3 sin 2θ + 2 sin θ
5 + 3 cos θ
, θ ∈ [0, 2π]
prikazana je na Slici 16.Ova kriva sece realnu osu u tackama za koje je 3 sin 2θ + 2 sin θ = 0, tj. sin θ = 0 ili
cos θ = −2/3, odnosno θ1 = 0, θ2,3 = π ± arccos(−2/3). Kako je h(θ1) = 0 i h(θ2,3) = −43,
interval apsolutne stabilnosti ove metode je I = (−4/3, 0), sto smo dobili i u Primeru 3.
Oblasti stabilnosti razlicitih Adams-Moultonovih i Adams-Bashfortovih metoda prikazanisu na Slici 17 i 18, a razlicitih BDF-metoda na Slici 19.
22
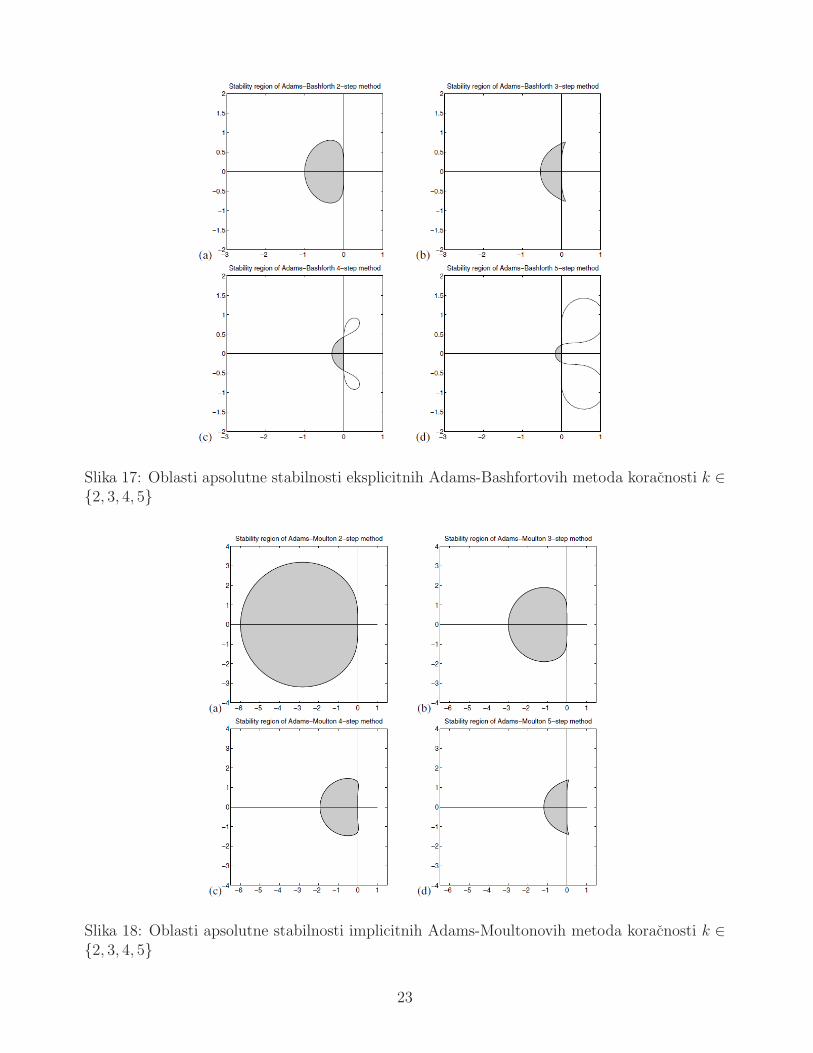
Slika 17: Oblasti apsolutne stabilnosti eksplicitnih Adams-Bashfortovih metoda koracnosti k ∈{2, 3, 4, 5}
Slika 18: Oblasti apsolutne stabilnosti implicitnih Adams-Moultonovih metoda koracnosti k ∈{2, 3, 4, 5}
23
∗ Oblasti stabilnosti Adamsovih metoda su ogranicene;
∗ Oblasti stabilnosti Adamsovih metoda se smanjuju sa povecanjem reda tacnosti p;
∗ Oblasti stabilnosti implicitnih Adamsovih metoda (Adams-Moultonovih) su mnogo veciod oblasti stabilnosti eksplicitnih Adamsovih metoda (Adams-Bashfortovih);
∗ Adamsove metode nisu A-stabilne (sto je i razlog za uvodjenje BDF-metoda)
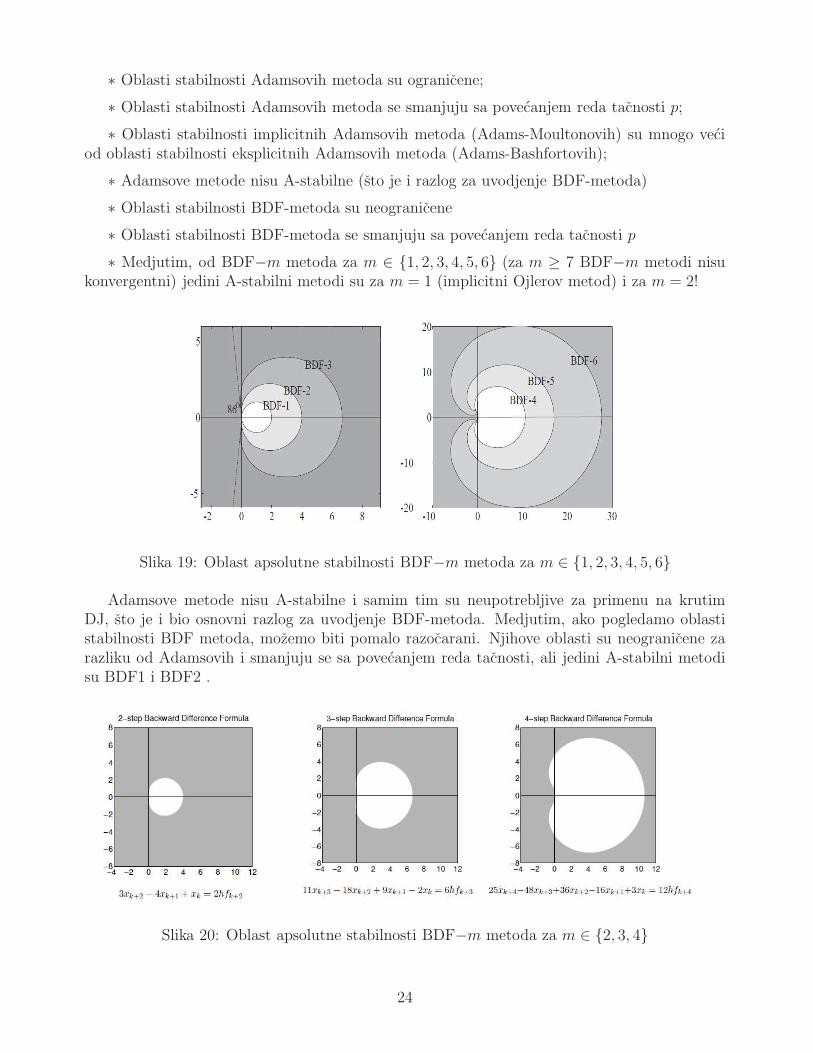
∗ Oblasti stabilnosti BDF-metoda su neogranicene
∗ Oblasti stabilnosti BDF-metoda se smanjuju sa povecanjem reda tacnosti p
∗ Medjutim, od BDF−m metoda za m ∈ {1, 2, 3, 4, 5, 6} (za m ≥ 7 BDF−m metodi nisukonvergentni) jedini A-stabilni metodi su za m = 1 (implicitni Ojlerov metod) i za m = 2!
Slika 19: Oblast apsolutne stabilnosti BDF−m metoda za m ∈ {1, 2, 3, 4, 5, 6}
Adamsove metode nisu A-stabilne i samim tim su neupotrebljive za primenu na krutimDJ, sto je i bio osnovni razlog za uvodjenje BDF-metoda. Medjutim, ako pogledamo oblastistabilnosti BDF metoda, mozemo biti pomalo razocarani. Njihove oblasti su neogranicene zarazliku od Adamsovih i smanjuju se sa povecanjem reda tacnosti, ali jedini A-stabilni metodisu BDF1 i BDF2 .
Slika 20: Oblast apsolutne stabilnosti BDF−m metoda za m ∈ {2, 3, 4}
24
Ovaj zakljucak koji se namece sa Slika 19 i 20 da BDF−m metodi za m ≥ 3 nisu A-stabilnije zapravo teorijski potvrdjen rezultat:
Druga Dahlquistova barijera stabilnosti:
A-stabilna implicitna linearna visekoracna metoda moze biti reda najvise p = 2.Eksplicitni LVM ne moze biti A-stabilan.
Iz tvrdjenja druge Dahlquistove barijere stabilnosti nazalost zakljucujemo da vrlo mali brojLVM moze biti A-stabilan, odnosno da je A-stabilnost LVM prilicno jak uslov numericke sta-bilnosti. Medjutim, ovaj rezultat ne znaci da metode koje nisu A-stabilne ne treba uopste pri-menjivati kod resavanja krutih problema, vec da kod njihove primene treba biti JAKO pazljiv.Upravo iz razloga sto je A-stabilnost vrlo jak pojam stabilnosti, uvode se jos neki ”oslabljeni”pojmovi stabilnosti.
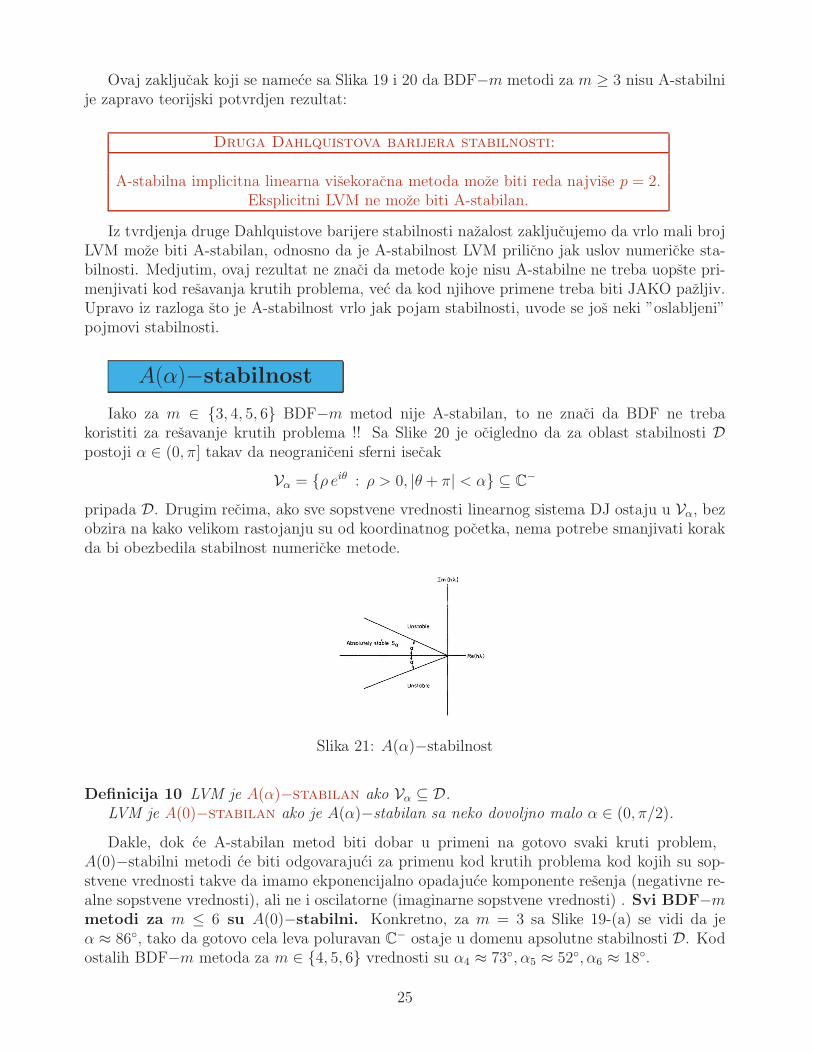
A(α)−stabilnost
Iako za m ∈ {3, 4, 5, 6} BDF−m metod nije A-stabilan, to ne znaci da BDF ne trebakoristiti za resavanje krutih problema !! Sa Slike 20 je ocigledno da za oblast stabilnosti Dpostoji α ∈ (0, π] takav da neograniceni sferni isecak
Vα = {ρ eiθ : ρ > 0, |θ + π| < α} ⊆ C−
pripada D. Drugim recima, ako sve sopstvene vrednosti linearnog sistema DJ ostaju u Vα, bezobzira na kako velikom rastojanju su od koordinatnog pocetka, nema potrebe smanjivati korakda bi obezbedila stabilnost numericke metode.
Slika 21: A(α)−stabilnost
Definicija 10 LVM je A(α)−stabilan ako Vα ⊆ D.LVM je A(0)−stabilan ako je A(α)−stabilan sa neko dovoljno malo α ∈ (0, π/2).
Dakle, dok ce A-stabilan metod biti dobar u primeni na gotovo svaki kruti problem,A(0)−stabilni metodi ce biti odgovarajuci za primenu kod krutih problema kod kojih su sop-stvene vrednosti takve da imamo ekponencijalno opadajuce komponente resenja (negativne re-alne sopstvene vrednosti), ali ne i oscilatorne (imaginarne sopstvene vrednosti) . Svi BDF−mmetodi za m ≤ 6 su A(0)−stabilni. Konkretno, za m = 3 sa Slike 19-(a) se vidi da jeα ≈ 86◦, tako da gotovo cela leva poluravan C− ostaje u domenu apsolutne stabilnosti D. Kodostalih BDF−m metoda za m ∈ {4, 5, 6} vrednosti su α4 ≈ 73◦, α5 ≈ 52◦, α6 ≈ 18◦.
25

Teorema 1 (i) Eksplicitni LVM ne moze biti A(0)−stabilan.(ii) Postoji samo jedan A(0)−stabilan k−koracni metod ciji je red tacnosti ≥ k + 1 - to je
trapezno pravilo.(iii) Za svako α ∈ (0, π/2), postoji A(α)−stabilan k−koracni metod reda tacnosti p za koji
je k = p = 3 ili k = p = 4.
L-stabilnost =⇒ A-stabilnost =⇒ A(0)−stabilnost
Relevantnost linearnog model-problema
Kod resavanje nelinearnog normalnog sistema DJ
y′ = f(t, y)
mozemo u izvesnim slucajevima analizu stabilnosti NM izvrsiti sledecim postupkom svod-jenja na linearan sistem sa konstantnim keoficijentima. Iako tkz. linearizovani sistem pred-stavlja samo aproksimaciju nelinearnog sistema, ponasanje resenja nelinarnog sistema u okolinipolozaja ravnoteze je u vecini slucajeva isti kao i ponasanje linearizovanog sistema. Naravno,da je generalno resavanje nelinarnih sistema znatno komplikovanije i cesto zahteva posebnu idetaljniju analizu.
Neka je dat sistem od m DJ prvog reda:
(28) y′ = f(t, y)
↓ linearizacija
(29) y′ = J(t)y
↓ fiksiranje koeficijenata t = t⋆ → J(t⋆) = A
y′ = Ay
↓ dijagonalizacija
y′ = J y
Linearizacija: Ako je y∗(t) partikularno resenje sistema (28) koje trazimo i y(t) proizvoljnopartikularno resenje, tada ce stabilnost i krutost sistema zavisiti od ponasanja
(δy)(t) = y(t)− y∗(t) .
Ako je f diferencijabilna po y, imamo
f(y, t) = f(y∗, t) + J(t)(δy)(t) + o(||δy||2)
gde je
[J(t)]ij =
[∂f (i)
∂y(j)(y∗(t), t)
]
ij
1 ≤ i, j ≤ m
26
Dakle, δy zadovoljava linearni sistem DJ
(δy)′(t) = J(t)(δy)(t) + o(||δy||2) .
Sistem (29) moze se smatrati dobrom aproksimacijom nelinearnog sistema (28) sto je δy manje.Fiksiranje koeficijenata: Kako je problem stabilnosti, kao i problem krutosti zapravo
vremenski termin, odnosno desava se u nekom vremenskom trenutku t∗, moze se uzeti
A = J(t∗) .
Za uspesno izracunavanje y∗(t) za t ≈ t∗ nekom NM, korak h se mora izabrati dovoljno maloda za sve sopstvene vrednosti λi matrice J(t∗) vrednosti hi = hλi, i = 1, 2, . . . , N leze u oblastiapsolutne stabilnosti metode. Krutost sistema se karakterise kada vremenska skala potrebna dase odredi promena partikularnog y⋆(t) za t ≈ t⋆ je mnogo sporija nego vremenska skala kojomse opisuje neka mala promena tog resenja δy(t) za t ≈ t⋆.
2 4 6 8 10
-2
-1
1
2
0 10 20 30 40 500.00
0.02
0.04
0.06
0.08
0.10
Slika 22: Eksplicitni Ojlerov metod za KP y′(t) = −2ty(t), y(0) = 1 sa korakom h = 0.2 na[0, 10] i greska en, 0 ≤ n ≤ 50
2 4 6 8 10 12 14
-2
-1
1
2
0 20 40 60 800.00
0.02
0.04
0.06
0.08
0.10
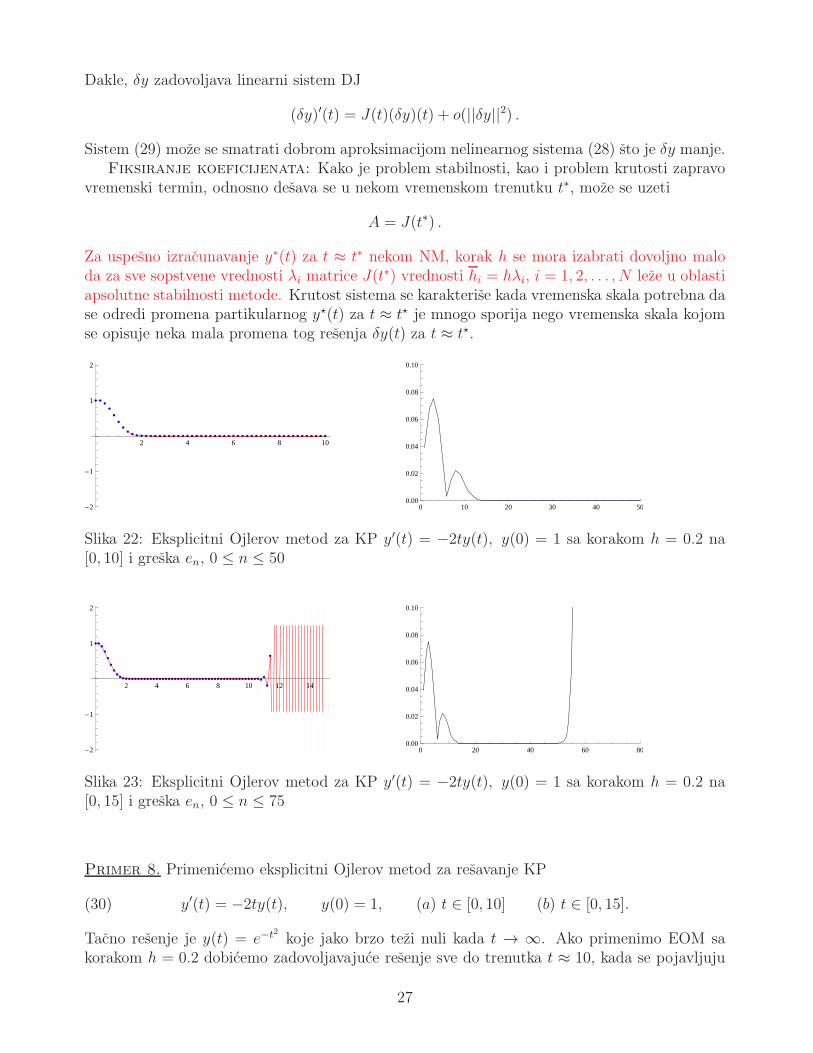
Slika 23: Eksplicitni Ojlerov metod za KP y′(t) = −2ty(t), y(0) = 1 sa korakom h = 0.2 na[0, 15] i greska en, 0 ≤ n ≤ 75
Primer 8. Primenicemo eksplicitni Ojlerov metod za resavanje KP
(30) y′(t) = −2ty(t), y(0) = 1, (a) t ∈ [0, 10] (b) t ∈ [0, 15].
Tacno resenje je y(t) = e−t2 koje jako brzo tezi nuli kada t → ∞. Ako primenimo EOM sakorakom h = 0.2 dobicemo zadovoljavajuce resenje sve do trenutka t ≈ 10, kada se pojavljuju
27
oscilacije u pribliznom resenju. Nestabilnost eksplicitnog Ojlerov metoda pojavila se za velikavremena t.
Za KP (30) λ nije konstantno, vec imamo
yn+1 = yn + h · (−2tn yn) = (1 + h)yn, n = 0, 1, 2, . . . h = −2htn
tj. λ = −2tn. Primenimo li formalno uslov stabilnosti, dobijamo −2 < −2htn < 0. Sakorakom h = 0.2, uslov stabilnosti je narusen za tn > 5. Mozemo zakljuciti da ova analiza dajekvalitativno dobro objasnjenje pojave nestabilnosti uocene na Slici 23.
28

![wFL :« Õö ù« - cgtsa.com · rO d « sL d « tK « r :.dJ « ʬdI « w v UF tK « ‰U ÓÊË Ôd????? Ô ÚQ?Ó ”U?]MK? ÚX? Ó d?????Ú Ô√ ÌW????? ] Ô√ Ód ...](https://static.fdocument.org/doc/165x107/5c01b81409d3f22b088d115a/wfl-ooe-u-cgtsa-ro-d-sl-d-tk-r-dj-edi-w-v-uf.jpg)







![wFL :« Õö ù« - islam chat · rO d « sL d « tK « r :.dJ « ʬdI « w v UF tK « ‰U ÓÊË Ôd????? Ô ÚQ?Ó ”U?]MK? ÚX? Ó d?????Ú Ô√ ÌW????? ] Ô√ Ód ...](https://static.fdocument.org/doc/165x107/5c01b81409d3f22b088d1166/wfl-ooe-u-islam-chat-ro-d-sl-d-tk-r-dj-edi-w-v.jpg)