Stabilnost pri vožnji v ovinek -...
12
Univerza v Ljubljani Fakulteta za strojništvo VOZILA VSŠ 2019/2020 Vp. št Ime in priimek Datum Stabilnost vozila pri vožnji v ovinek Definicija naloge Na modelu vozila v merilu 1 : 10 z električnim pogonom (slika 1) ugotovite njegovo stabilnost pri vožnji v ovinek s pomočjo preizkusa na način zavijanja s konstantnim krmilnim kotom δ f po izdelanem načrtu preizkušanja, ki bo izdelan na pripravljalni vaji. Podatki o zgradbi vozila in nekateri geometrijski podatki so na voljo v priloženi datoteki Tamiya_TT02D.pdf. 1. Opišite uporabljeno opremo in potek preizkušanja. 2. Preverite krmiljenje vozila pri majhni hitrosti in njegovo izpolnjevanje Ackermannovega pogoja. 3. Opišite, kako se je vozilo med posamezno meritvijo obnašalo glede krmiljenja. Narišite krivuljo odvisnosti ukrivljenosti trajektorije vozila 1/R od bočnega pospeška vozila a y in določite koeficiente podkrmiljenja K us za dano konfiguracijo vozila pri različnih hitrostih vožnje oziroma položajih "plina". 4. Ugotovite in opišite spremembo v obnašanju vozila pri spremembi parametrov (zamenjava pnevmatik, obremenitev osi, pogon). 5. Izračune in ugotovitve predstavite v obliki tehničnega poročila v predpisani obliki. Svoje ugotovitve in komentarje navedite v sklepu. Slika 1: Vozilo uporabljeno v preizkusu Napotki za izdelavo naloge Izvedba preizkusa Preizkus na način zavijanja s konstantnim krmilnim kotom smo izvedli pri različnih položajih "plina", ki je stopenjsko nastavljiv na oddajniku RV naprave. Med preizkusom smo neposredno zajemali naslednje podatke: 1. časovni potek pospeškov v bližini težišča vozila v treh koordinantnih smereh koordinatnega sistema vozila s prenosnim pospeškomerom GCDC X6-2 (slika 2 levo, podatki v priloženi datoteki GCDC_X6-2.pdf),
Transcript of Stabilnost pri vožnji v ovinek -...

Univerza v Ljubljani Fakulteta za strojništvo
VOZILA VSŠ 2019/2020
Vp. št Ime in priimek Datum
Stabilnost vozila pri vožnji v ovinek
Definicija naloge Na modelu vozila v merilu 1 : 10 z električnim pogonom (slika 1) ugotovite njegovo stabilnost pri vožnji v ovinek s pomočjo preizkusa na način zavijanja s konstantnim krmilnim kotom δf po izdelanem načrtu preizkušanja, ki bo izdelan na pripravljalni vaji. Podatki o zgradbi vozila in nekateri geometrijski podatki so na voljo v priloženi datoteki Tamiya_TT02D.pdf.
1. Opišite uporabljeno opremo in potek preizkušanja.
2. Preverite krmiljenje vozila pri majhni hitrosti in njegovo izpolnjevanje Ackermannovega pogoja.
3. Opišite, kako se je vozilo med posamezno meritvijo obnašalo glede krmiljenja. Narišite krivuljo odvisnosti ukrivljenosti trajektorije vozila 1/R od bočnega pospeška vozila ay in določite koeficiente podkrmiljenja Kus za dano konfiguracijo vozila pri različnih hitrostih vožnje oziroma položajih "plina".
4. Ugotovite in opišite spremembo v obnašanju vozila pri spremembi parametrov (zamenjava pnevmatik, obremenitev osi, pogon).
5. Izračune in ugotovitve predstavite v obliki tehničnega poročila v predpisani obliki. Svoje ugotovitve in komentarje navedite v sklepu.
Slika 1: Vozilo uporabljeno v preizkusu
Napotki za izdelavo naloge
Izvedba preizkusa
Preizkus na način zavijanja s konstantnim krmilnim kotom smo izvedli pri različnih položajih "plina", ki je stopenjsko nastavljiv na oddajniku RV naprave.
Med preizkusom smo neposredno zajemali naslednje podatke:
1. časovni potek pospeškov v bližini težišča vozila v treh koordinantnih smereh koordinatnega sistema vozila s prenosnim pospeškomerom GCDC X6-2 (slika 2 levo, podatki v priloženi datoteki GCDC_X6-2.pdf),

Univerza v Ljubljani Fakulteta za strojništvo
VOZILA VSŠ 2019/2020
Vp. št Ime in priimek Datum
2. videoposnetek vozila z videokamero visoke ločljivosti GoPro HERO (slika 2 desno),
3. čas z ročno štoparico.
Med preizkusom smo ročno na merilni list beležili tudi naslednje podatke:
1. položaj plina v odvisnosti od časa (sporoča voznik),
2. lastna opažanja o gibanju vozila v odvisnosti od časa (spremembe radija, zdrsi itd.).
Slika 2: pospeškomer GCDC X6-2 in kamera GoPro HERO
Zajem izmerkov
Po preizkusu iz datotek z izmerjenimi pospeški za eno izmed meritev (v skladu z dogovorom na uvodni vaji), narišite graf časovnega poteka pospeškov v vseh treh smereh koordinatnega sistem vozila.
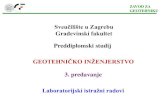
Iz grafa s pomočjo drsečega povprečja določite povprečne bočne pospeške (ay) pri ustaljenem gibanju vozila v vsakem od položajev "plina" (na sliki 3 so označeni s P1 do P7). Pri določanju časovnih mej intervalov si pomagajte z videoposnetkom in z zabeleženimi časi z merilnega lista.
Slika 3: primer izmerjenega časovnega poteka bočnega pospeška vozila

Univerza v Ljubljani Fakulteta za strojništvo
VOZILA VSŠ 2019/2020
Vp. št Ime in priimek Datum
Iz videoposnetka za isto meritev določite polmere trajektorij vozila, ko se le-to pri posameznih položajih "plina" ustali na konstantnem polmeru. Pri oceni si pomagajte z mrežo talnih ploščic. Pri tem upoštevajte, da so le-te kvadrati s stranico 370 mm. Za analizo uporabite program Tracker in sledite navodilom v naslednjih podtočkah.
Uvoz videoposnetka za analizo
To izvedemo s klikom na File → Import → Video (Slika 4).
Slika 4: Uvoz videoposnetka

Univerza v Ljubljani Fakulteta za strojništvo
VOZILA VSŠ 2019/2020
Vp. št Ime in priimek Datum
Filter za korekcijo radialnega izkrivljanja
Aktiviramo ga prek Video → Filters → New → Radial Distortion. V oknu pod Input Image izberemo tip projekcije Fisheye in vnesemo diagonalno vidno polje (127 °). Pod Fixed Pixels izberemo premer fiksnih slikovnih točk 68 %. Filter zapremo s klikom na Close.
Tip projekcije in vrednosti veljajo le za uporabljeno kamero GoPro Hero 3. V primeru uporabe druge kamere je potrebno vnesti druge parametre.
Slika 5: Radialno izkrivljanje

Univerza v Ljubljani Fakulteta za strojništvo
VOZILA VSŠ 2019/2020
Vp. št Ime in priimek Datum
Filter za korekcijo zajema slike pod kotom
Filter zaženemo po naslednji poti:
a) Video → Filters → New → Perspective
b) V drugem koraku postavimo oglišča štirikotnika tako, da je v vodoravni smeri zajetih 16 plošč (tla v prostoru), v navpični smeri pa 9 plošč.
c) Pri tem pazimo, da so oglišča postavljena čim bolj točno na presečiščih (beli robovi med ploščami), saj to vpliva na kakovostno izvedeno korekcijo zajema slike pod kotom (pomagamo si lahko s povečavo na mestu oglišča: tipka CTRL + vrtljiv gumb na miški).
d) Zadnji korak je klik na zavihek Output, pri čemer pazimo, da je pri obliki izbran pravokotnik (angl. Rectangle). Filter zapremo s klikom na Close.
Vrednosti parametrov veljajo le za uporabljeno kamero GoPro Hero 3. V primeru uporabe druge kamere je potrebno vnesti druge parametre.
Slika 6: Zajem slike pod kotom

Univerza v Ljubljani Fakulteta za strojništvo
VOZILA VSŠ 2019/2020
Vp. št Ime in priimek Datum
Kalibracija in koordinatni sistem
Kalibracija videoposnetka poteka tako, da vnesemo merilo v navpični in vodoravni stranici na eno izmed kvadratnih plošč na tleh v prostoru. Plošče so kvadratne oblike s stranico 370 mm. Merilo aktiviramo s klikom na:
a) New → Calibration Stick (Slika 7)
b) Ko postavimo merilo, z dvoklikom na vrednost spremenimo še to in nato želeno vrednost potrdimo s tipko Enter.
Slika 7: Kalibracija

Univerza v Ljubljani Fakulteta za strojništvo
VOZILA VSŠ 2019/2020
Vp. št Ime in priimek Datum
Koordinatni sistem aktiviramo s klikom na ikono Show or hide the coordinate axes (Slika 8) in ga poljubno lociramo v ravnino (ugodno je, da ga postavimo tako, da so vrednosti točk trajektorije ves čas vožnje pozitivne).
Slika 8: Aktivacija koordinatnega sistema

Univerza v Ljubljani Fakulteta za strojništvo
VOZILA VSŠ 2019/2020
Vp. št Ime in priimek Datum
Masna točka
Masno točko ustvarimo s klikom na ikono Create → Point Mass (Slika 9).
Slika 9: Masna točka
Nastavitev začetka in konca videoposnetka
Za sinhronizacijo časa in podatkov s pospeškomerom uporabimo določevanje začetka in konca uvoženega videoposnetka. Začetek videoposnetka je takrat, ko avtomobil spustimo na tla; takrat pride do velikega pospeška v smeri Z, kar opazimo na grafu pospeškov. Za nastavitev začetka a) in konca b) videoposnetka uporabimo črna trikotnika v spodnjem delu (območje za upravljanje predvajanja posnetka) (Slika 10). Na želeni poziciji uporabimo desni klik in izberemo Set start/end frame to slider.
Slika 10: Začetek in konec obravnave videoposnetka

Univerza v Ljubljani Fakulteta za strojništvo
VOZILA VSŠ 2019/2020
Vp. št Ime in priimek Datum
Priprava in zagon modula avtomatskega sledenja
Modul za zagon avtomatskega sledenja poženemo s klikom na ikono Mass A → Autotracker (Slika 11).
Slika 11: Zagon modula Autotracker
Ko se modul zažene, uporabimo vrtljiv miškin gumb, da se približamo objektu, ki mu želimo slediti (v našem primeru je to luč na modelu vozila) in uporabimo kombinacijo tipk CTRL + SHIFT + klik na objekt (Slika 12). S premikanjem točke a) spreminjamo velikost vzorca za sledenje, s premikanjem točke b) pa spreminjamo velikost območja iskanja. Avtomatsko sledenje nato poženemo s klikom na c) Search. Preden poženemo program, je potrebno v modulu izbrati še prikaz merjenih količin (Slika 13 a) s klikom na ikono Table. V našem primeru so to čas, x in y lokacija ter hitrost (Slika 13 b).
Slika 12: Pričetek avtomatskega sledenja

Univerza v Ljubljani Fakulteta za strojništvo
VOZILA VSŠ 2019/2020
Vp. št Ime in priimek Datum
Slika 13: Izbor beleženja veličin
V kolikor želimo spremeniti način prikaza lokacij in/ali trajektorije objekta, uporabimo označene ikone v orodni vrstici (Slika 14). Če želimo nastaviti npr. prikaz celotne trajektorije, uporabimo ikono a) in izberemo No trails, nato z ikono b) skrijemo zaporedno številko lokacije, s klikom na ikono c) vklopimo prikaz trajektorije in nazadnje s klikom na ikono d) izklopimo prikaz vseh zaznanih lokacij. S temi koraki dobimo zgolj prikaz trajektorije skozi celotno meritev, iz njene oblike oz. poteka pa lahko razberemo obnašanje modela vozila med vožnjo.
Slika 14: Prikaz trajektorije/lokacije
Priprava podatkov za uvoz v Excel
Označimo celotno tabelo z izmerjenimi podatki, nato pa z desnim klikom na podatke odpremo meni, kjer izberemo Copy Selected Cells → As Formatted.
Kopirane podatke uredimo npr. v programu Notepad, pri čemer ustrezno uredimo zapis decimalnega ločila. Podatki so tako pripravljeni na uvoz v Excel.

Univerza v Ljubljani Fakulteta za strojništvo
VOZILA VSŠ 2019/2020
Vp. št Ime in priimek Datum
Analiza rezultatov Točke s koordinatami (ay/g, 1/R) za posamezne položaje "plina" narišite na graf in jih povežite s krivuljo 1/R(ay/g). Za posamezne položaje "plina" ugotovite koeficiente podkrmiljenja Kus, ki so določeni, kot prikazuje slika 4. Pri določanju odvodov uporabite analitično metodo izračuna naklona krivulj med posameznimi pari točk.
Radij ukrivljenosti parametrične krivulje določite po naslednji enačbi
Odvode koordinat po času določite z izračunom diferenčnega količnika med sosednjima izmerkoma.
Na koncu narišite še graf odvisnosti koeficienta podkrmiljenja od hitrosti vozila Kus(v) in komentirajte njegovo obliko.
Datoteke z izmerki s pospeškomera so poimenovane MeritevX.CSV, kjer je X številka meritve (1, 2, 3, 4, 5). Datoteke z videoposnetki bomo prenesli na računalnike neposredno po meritvah.
Slika 15: primer oblike krivulje 1/R(ay) in definicija koeficienta podkrmiljenja
Izdelano poročilo oddajte na spletni strani za oddajo vaj do 3. 1. 2019 do 19:00.
Pripravila Miha Ambrož in Primož Dornik, 2. 12. 2019
𝑑(1 𝑅⁄ )
𝑑 𝑎𝑦 𝑔⁄= −
𝐾𝑢𝑠𝑙𝑊𝐵

Univerza v Ljubljani Fakulteta za strojništvo
VOZILA VSŠ 2019/2020
Vp. št Ime in priimek Datum
Stabilnost vozila pri vožnji v ovinek - merilni list
Datum in čas meritve: .......................................................................................................................... Skupina:
položaj plina vrednost čas začetka čas konca opomba
P0
P1
P2
P3
P4
P5
P6
P7
P8
P9
P10
P11
P12
P13
P14
Nastavitev krmilnega kota na RV napravi δf = .............................° Medosna razdalja vozila lWB = ............................. mm
Obremenitev sprednje osi vozila G1 = .............................. N Obremenitev zadnje osi vozila G2 = .............................. N
Koeficient vprijemanja pnevmatik spredaj µ1 = ……..…...... Koeficient vprijemanja pnevmatik spredaj µ2 = ……..…......
Pogon (ustrezno obkrožite): spredaj zadaj obe osi
Opombe:
..................................................................................................................................................................................................................................
..................................................................................................................................................................................................................................
..................................................................................................................................................................................................................................
..................................................................................................................................................................................................................................