Notes on the Boltzmann Equation
28
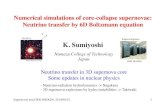
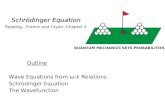
Notes on the Boltzmann Equation Alberto Bressan - Dept. of Mathematics, Penn State University (Lecture notes for a summer course given at S.I.S.S.A., Trieste, 2005) We wish to describe the motion of a rarefied gas, consisting of a very large number of identical particles, moving in a three-dimensional space. For (t,x,ξ ) ∈ [0, ∞[ ×IR 3 × IR 3 , we consider a function f (t,x,ξ ) describing the density of particles at time t, at the point x, having speed ξ . In alternative, we may also think of f (t,x,ξ ) as the probability of finding a particle with speed ξ near the point x, at time t. If no collisions occur, the speed ξ of each particle will remain constant in time. A particle with speed ξ and located at the point x at the initial time t = 0 will move to x + τξ at a later time τ . Therefore f (τ,x,ξ )= f (0,x − τξ, ξ ). In this case, f provides a solution to the linear transport equation ∂ t f + ξ ·∇ x f =0. (0.1) The presence of collisions accounts for an additional quadratic term on the right hand side: ∂ t f + ξ ·∇ x f = Q(f ). (0.2) The equation (0.2) is the famous Boltzmann equation. A specific form of the collision kernel Q will be derived in the next section. 1 - The collision kernel. In the following, the particles of the gas will be modelled as hard spheres, all with the same radius, that hit each other with perfectly elastic collisions. We first observe that if two particles move along the same straight line and hit each other with a perfectly elastic collision, their velocities will be exchanged after the impact (fig. 1). figure 1 1
Transcript of Notes on the Boltzmann Equation

Notes on the Boltzmann Equation
Alberto Bressan - Dept. of Mathematics, Penn State University
(Lecture notes for a summer course given at S.I.S.S.A. , Trieste, 2005)
We wish to describe the motion of a rarefied gas, consisting of a very large number of identicalparticles, moving in a three-dimensional space. For (t, x, ξ) ∈ [0,∞[×IR3 × IR3, we consider afunction f(t, x, ξ) describing the density of particles at time t, at the point x, having speed ξ.In alternative, we may also think of f(t, x, ξ) as the probability of finding a particle with speed ξnear the point x, at time t.
If no collisions occur, the speed ξ of each particle will remain constant in time. A particle withspeed ξ and located at the point x at the initial time t = 0 will move to x+ τξ at a later time τ .Therefore f(τ, x, ξ) = f(0, x − τξ, ξ). In this case, f provides a solution to the linear transportequation
∂tf + ξ · ∇xf = 0. (0.1)
The presence of collisions accounts for an additional quadratic term on the right hand side:
∂tf + ξ · ∇xf = Q(f). (0.2)
The equation (0.2) is the famous Boltzmann equation. A specific form of the collision kernel Qwill be derived in the next section.
1 - The collision kernel.
In the following, the particles of the gas will be modelled as hard spheres, all with the sameradius, that hit each other with perfectly elastic collisions.
We first observe that if two particles move along the same straight line and hit each otherwith a perfectly elastic collision, their velocities will be exchanged after the impact (fig. 1).
figure 1
1

More generally, if two spherical particles move in IR3, by their angle of collision we mean theunit vector n parallel to the segment joining the centers of the spheres at the instant of collision.
If the particles hit each other at an angle n, then the components of their velocities along nwill be exchanged, while the components perpendicular to n will remain the same (fig. 2). Callingξ and ξ∗ the velocities of the particles before the collision, and ξ′, ξ′∗ their respective velocities afterthe collision, we thus have
ξ′ = ξ −(n · (ξ − ξ∗)
)n,
ξ′∗ = ξ∗ +(n · (ξ − ξ∗)
)n.
(1.1)
The exchange in the normal velocities is reflected by the identities
ξ′ · n = ξ∗ · n , ξ′∗ · n = ξ · n .
n
ξ ξ∗
ξ’∗
ξ’
figure 2
Notice that a change in the sign of n does not affect the linear transformation (1.1). Setting
V.= ξ − ξ∗ , ξ0
.=ξ + ξ∗
2, ρ
.=
|ξ − ξ∗|2
, (1.2)
an alternative construction of the incoming and outgoing speeds is illustrated in fig. 3. Considerthe sphere
Sξξ∗.=ξ′ ∈ IR3 ; |ξ′ − ξ0| = ρ
2

ξ0
−n
n
ξ*
ξ
ξ*’
’ξ
figure 3
i.e. the surface of the ball B(ξ0, ρ) having the segment ξξ∗ as a diameter. If the collision occurs at
an angle n, the speeds ξ′, ξ′∗ of the two outgoing particles are obtained as the intersections of thesphere Sξξ∗ with the lines through ξ, ξ∗, parallel to n.
Let now S2 .=n ∈ IR3 ; |n| = 1
be the surface of the unit ball. To find the probability
that the collision occurs at an angle n ∈ S2, it is convenient to take a frame of reference in whichone particle is at rest, say ξ∗ = 0, while the other has speed V = ξ − ξ∗. Instead of thinking oftwo rigid spheres both with radius r > 0, we can equivalently think of a point particle hitting asphere with radius 2r. In this case (fig. 4), we see that the rate of collisions at an angle n is givenby |n · V | dn, where dn denotes the surface element on the unit sphere S2.
V=
ξξ∗
n
dn
ξ − ξ ∗
figure 4
Following the probabilistic interpretation, we see that the collision kernel has the effect ofreplacing the two particles with speeds ξ, ξ∗ with a cloud of particles whose speeds are distributedover the sphere Sξξ∗ having the segment ξξ∗ as diameter. Actually, an elementary computationshows that the speed of the outgoing particles is uniformly distributed over the sphere Sξξ∗ . To seethis, referring to fig. 5 we let (θ, ϕ) ∈ [0, π] × [0, 2π] be the spherical coordinates of the angle at
3

which the collision takes place, and let (θ′, ϕ′) be the spherical coordinates of the outgoing velocityξ′ on the sphere Sξξ∗ . Choosing a oordinate frame so that the x-axis is parallel to the vector ξ∗−ξ,we thus have
n = (cos θ , sin θ cosϕ , sin θ sinϕ),
ξ′ − ξ0 = ρ (cos θ′ , sin θ′ cosϕ′ , sin θ′ sinϕ′).
Notice that (1.1) yieldsθ′ = 2θ , ϕ′ = ϕ .
We observe that the probability that the collision angle n lies in the infinitesimal region describedby dA = [θ, θ + dθ]× [ϕ, ϕ+ dϕ] is
Prob.(dA) = cos θ dn = cos θ sin θ dθdϕ ,
where dn is the area of the infinitesimal region. Hence, the area covered by the correspondingspeed ξ′ is
meas(dA′) = ρ2dθ′ sin θ′dϕ′ = ρ2 2θdθ · 2 sin θ cos θ dϕ = 4ρ2Prob.(dA) . (1.3)
According to (1.3), the area of any portion dA′ of the spherical surface Sξξ∗ is proportional to theprobability Prob.ξ′ ∈ dA′. This proves the uniform distribution of the outgoing velocities.
We remark that, as the intensity of collisions grows as |ξ − ξ∗| and the surface of the sphereis 4πρ2 = π |ξ − ξ∗|2, it is clear that the above probability density per unit area decreases as ρ−1.
θθ*
ξ’
ρn
θ’
2S
S ξξ∗
ξ ξ
figure 5
We now consider one particular speed ξ ∈ IR3. The rate at which particles with speed ξ willhit other particles and thus change their speed is
Q−(f)(ξ) = α
∫
IR3
∫
S2
∣∣n · (ξ − ξ∗)∣∣ f(ξ)f(ξ∗) dn dξ∗
= 2πα
∫
IR3
|ξ − ξ∗| f(ξ)f(ξ∗) dξ∗ ,(1.4)
where α is some constant factor and dn denotes the surface element on the unit sphere. This is aloss term, responsible for the decrease in the number of particles with speed ξ.
4

Remark 1. As shown in fig. 4, the integral in (1.4) should actually range only over values of n inthe half sphere
S−.=n ∈ S2 ; n · (ξ − ξ∗) < 0
.
However, extending the integral over the whole sphere S we obtain exactly the same result, multi-plied by two. It is thus convenient to integrate over S, and incorporate the factor 1/2 within theconstant of proportionality α.
Next, we observe that new particles with speed ξ may emerge from interactions. Indeed, sincethe collision dynamics is perfectly reversible, a new particle with speed ξ will be produced by theinteraction of two particles with speeds ξ′, ξ′∗ as in (1.1), at an angle n. Indeed, such collisionwould exchange once again the components along n of the two speeds, thus yielding the originaltwo particles with speeds ξ, ξ∗. Notice that, for any given ξ∗ ∈ IR3 and any fixed angle n ∈ S2, theequations (1.1) uniquely determine the speeds of two particles whose collision yields the desiredresult. The rate at which such collisions occur, between particles of speeds ξ′, ξ′∗, is proportionalto ∣∣n · (ξ′ − ξ′∗)
∣∣ f(ξ′)f(ξ′∗) =∣∣n · (ξ − ξ∗)
∣∣ f(ξ′)f(ξ′∗). (1.5)
The above identity is an immediate consequence of (1.1). Integrating over all vectors ξ∗ ∈ IR3 andall angles n ∈ S2, we find that new particles with speed ξ are created at the rate
Q+(f)(ξ) = α
∫
IR3
∫
S2
∣∣n · (ξ − ξ∗)∣∣ f(ξ′)f(ξ′∗) dn dξ∗ . (1.6)
This is a gain term, responsible for the increase in the density of particles with speed ξ.
By a coordinate rescaling, we can assume that the proportionality constant in (1.4) and (1.6)is α = 1. The Boltzmann equation in (0.2) thus takes the form
∂tf + ξ · ∇xf =
∫
IR3
∫
S2
(f ′f ′∗ − ff∗)
∣∣n · (ξ − ξ∗)∣∣ dn dξ∗ . (1.7)
It is here understood that
f = f(t, x, ξ),
f∗ = f(t, x, ξ∗),
f ′ = f(t, x, ξ′),
f ′∗ = f(t, x, ξ′∗),
(1.8)
with ξ′, ξ′∗ given at (1.1) in terms of ξ, ξ∗ and n.
2 - Collision Invariants.
In this section we consider the homogeneous Boltzmann equation
∂t f = Q(f).=
∫
IR3
∫
S2
(f ′f ′∗ − ff∗)
∣∣n · (ξ − ξ∗)∣∣ dn dξ∗ (2.1)
where f = f(t, ξ) is independent of x. We seek functionals of the form
Φ(f).=
∫
IR3
φ(ξ) f(ξ) dξ (2.2)
5

which remain constant in time, along every solution of (2.1). Of course, this holds provided that∫
IR3
φ(ξ)Q(f) dξ = 0 (2.3)
for every velocity distribution f . Observing that the collision kernel Q replaces two particles withspeed ξ, ξ∗ with a cloud of particles uniformly distributed on the sphere Sξξ∗ , we see that (2.3)holds for every f ∈ C∞
c if and only if
φ(ξ) + φ(ξ∗) =
∫
Sξξ∗
φ(ξ′) dσ (2.4)
where dσ denotes the normalized surface area on the sphere Sξξ∗ . From (2.4) we deduce
φ(ξ) + φ(ξ∗) = φ(ξ′) + φ(ξ′∗) (2.5)
whenever the segments ξξ∗ and ξ′ξ′∗ are diameters of the same sphere, i.e. whenever (1.1) holds.
Lemma 2.1. Let φ : IR3 7→ IR be a C2 function that satisfies (2.5). Then
φ(ξ) = a+ b · ξ + c|ξ|2 (2.6)
for suitable constants a, c ∈ IR and b ∈ IR3.
Proof. Set
a.= φ(0) , b
.= ∇φ(0) , c
.=
1
6∆φ(0) .
We need to show thatψ(ξ) = φ(ξ)− a− b · ξ − c |ξ|2 ≡ 0 .
Notice that ψ is a collision invariant and satisfies
ψ(0) = 0 , ∇ψ(0) = 0 , ∆ψ(0) = 0 .
Consider any ξ∗ and let n be any unit vector perpendicular to ξξ∗ (see fig. 6a). Using (2.5) withξ = sn, ξ′ = 0 and ξ′∗ = ξ∗ + sn, for every s we obtain
ψ(sn) + ψ(ξ∗) = ψ(0) + ψ(ξ∗ + sn) .
Letting s→ 0+ we compute the directional derivative ∇ψ(ξ∗) ·n = 0. This implies that ψ = ψ(|ξ|)
must be a radially symmetric function. Its Taylor expansion at the origin vanishes up to secondorder.
Next, fix any unit vector n, set ξ = sn, ξ∗ = rn, and choose ξ′, ξ′∗ so that the segment ξ′ξ′∗ isperpendicular to ξξ∗ (see fig. 6b). For 0 < s < r we obtain
ψ(r) + ψ(s) = 2ψ(ρ(r, s)
), (2.7)
where
ρ(r, s) =
√(r − s
2
)2
+
(r + s
2
)2
=
√r2 + s2
2.
We now keep r fixed and let s vary. Differentiating (2.7) twice w.r.t. s, at s = 0 we find
∂
∂sψ(ρ(r, s)
)= ψ′(ρ)
1
2√
r2+s2
2
· s ,
∂2
∂s2ψ(ρ(r, s)
)∣∣∣∣s=0
= ψ′
(r√2
)· 1√
2 r= 0
The computation of the radial derivative thus yields ψ′(r/√2) ≡ 0, hence ψ ≡ 0, as claimed.
6

ns
n
ξ*
*’
nr0
ξ
ξ
ξs *
*’
ξ’
ξ ξ
0
figure 6a figure 6b
If now φ is a collision invariant, then the functional Φ in (2.2) is constant in time. Theseinvariants have a clear physical meaning:
1. Taking φ(ξ) ≡ 1 one obtains the conservation of
∫
IR3
f(ξ) dξ (mass) (2.11)
2. Taking φ(ξ).= ei · ξ, i = 1, 2, 3 (with e1, e2, e3 the standard basis in IR3), we obtain the
conservation of the vector ∫
IR3
ξ f(ξ) dξ (momentum) (2.12)
3. The choice φ(ξ).= |ξ|2/2 yields the conservation of
∫
IR3
|ξ|22f(ξ) dξ (energy) (2.13)
3 - Maxwellian distributions
We investigate here the existence of velocity distributions f = f(ξ) which yield a vanishingcollision integral:
Q(f)(ξ).=
∫
IR3
∫
S2
(f ′f ′∗ − ff∗)
∣∣n · (ξ − ξ∗)∣∣ dn dξ∗ = 0 ξ ∈ IR3 . (3.1)
7

Toward this goal, using the identity (2.8) with f = g and φ(ξ).= log f(ξ), we obtain the
Boltzmann inequality
∫
IR3
Q(f) log f dξ =1
2
∫
IR3
∫
IR3
∫
S2
(f ′f ′∗ − ff∗)
(log f + log f∗ − log f ′ − log f ′
∗
)|n · V | dn dξ∗ dξ
=1
2
∫
IR3
∫
IR3
∫
S2
(f ′f ′∗ − ff∗) log(ff∗/f
′f ′∗) |n · V | dn dξ∗ dξ
≤ 0(3.2)
because of the elementary inequality
(z − y) log(y/z) ≤ 0 for all y, z > 0 . (3.3)
Notice that the equality holds in (3.3) if and only if y = z. As a consequence, the left hand side of(3.2) is zero if and only if
ff∗ = f ′f ′∗ . (3.4)
Taking the logarithms of both sides, we see that (3.4) holds if and only if φ.= log f satisfies
(2.9). The set of functions f that yield a vanishing collision integral are thus the Maxwelliandistributions, having the form
f(ξ) = expa+ b · ξ + c|ξ2|
= A exp− β|ξ − v|2
(3.5)
for some A,β > 0, v ∈ IR3. These represent velocity distributions which are in statistical equilib-rium.
Returning to the original Boltzmann equation
∂tf + ξ · ∇xf = Q(f), (3.6)
multiplying both sides by log f and integrating w.r.t. ξ we obtain
d
dt
∫f ln f dξ =
∫[ft ln f + ft] dξ
=
∫Q(f) (lnf + 1) dξ −
∫(ξ · ∇xf) (ln f + 1) dξ
=
∫Q(f) ln f dξ −
∫∇x ·
(ξ f ln f) dξ .
(3.7)
This yields the macroscopic balance equation
∂tH(t, x) +∇x · I(t, x) = S(t, x) , (3.8)
where
H .=
∫
IR3
f ln f dξ , I .=
∫
IR3
ξ f ln f dξ , S .=
∫
IR3
Q(f) ln f dξ .
By (3.2), S ≤ 0. Hence, assuming suitable decay at |x| → ∞, we obtain
d
dt
∫
IR3
H(t, x) dx ≤ 0 .
8

In the homogeneous case where f is independent of x, (3.8) simply yields
d
dtH(t) ≤ 0 .
This is Boltzmann’s ”H-Theorem”.
4 - Symmetries
We consider here various transformations that leave invariant the family of solutions to theBoltzmann equation
∂t f + ξ · ∇xf =
∫
IR3
∫
S2
(f ′f ′∗ − ff∗)
∣∣n · (ξ − ξ∗)∣∣ dn dξ∗ . (4.1)
Let f = f(t, x, ξ) be a solution of (4.1). Then, for every t ∈ IR, the function
f(t, x, ξ).= f(t− t, x, ξ) (translation in time) (4.2)
provides another solution. The same is true of
f(t, x, ξ).= f(t, x− x, ξ) (translation in space) (4.3)
for every x ∈ IR3. Moreover, for every unitary 3× 3 matrix U , the function
f(t, x, ξ).= f(t, Ux, Uξ) (rotation in space) (4.4)
provides still another solution.
Next, consider a dilation of the form
f = λαf, t = λβt, x = λγx, ξ = λδξ,
so thatf(t, x, ξ)
.= λαf(λ−β t, λ−γ x, λ−δ ξ), (4.5)
with λ > 0. A direct computation yields
∂t f = λα−β ∂t f ,
ξ · ∇xf = λδ−γ+α ξ · ∇xf ,
Q(f) =
∫
IR3
∫
S2
(f ′f ′∗ − f f∗)
∣∣n · (ξ − ξ∗)∣∣ dn dξ∗ = λ2α+4δ Q(f) .
Therefore, if f = f(t, x, ξ) is a solution, the function
f(t, x, ξ) = λα f(λ−βt, λ−γx, λ−δξ)
will be another solution of the Boltzmann equation (4.1) provided that
−β = δ − γ = α+ 4δ . (4.6)
We thus have a 2-parameter family of dilations, leaving invariant the solution set of (4.1). Inparticular, taking α = 1, β = γ = −1, δ = 0 we find the new solutions
f(t, x, ξ) = λf(λt, λx, ξ). (4.7)
Moreover, taking α = 4, β = 0, γ = δ = −1 we find
f(t, x, ξ) = λ4f(t, λx, λξ). (4.8)
9

5 - The macroscopic balance equations
From the function f = f(t, x, ξ), one can obtain a macroscopic description of the gas, byintegration w.r.t. the variable ξ. We thus define the density of mass of the gas as
ρ(t, x).=
∫f(t, x, ξ) dξ , (5.1)
the density of momentum q = (q1, q2, q3),
qi(t, x).=
∫ξi f(t, x, ξ) dξ , (5.2)
and the energy density
w(t, x).=
1
2
∫|ξ|2 f(t, x, ξ) dξ . (5.3)
Moreover, we define the macroscopic velocity v = (v1, v2, v3) as
vi.=qiρ
=
∫ξi f dξ∫f dξ
, (5.4)
the momentum flow m = mij
mi,j.=
∫ξiξj f dξ (i, j = 1, 2, 3) , (5.5)
and the energy flow r = (r1, r2, r3)
ri.=
∫|ξ|2ξi f dξ . (5.6)
The microscopic velocity ξ of a particle can now be expressed as a sum
ξ = v + c ,
where c.= ξ−v represents the random deviation of the velocity of a single particle from the average
velocity v. Of course ∫c f dξ = 0 .
It is convenient to split the momentum flow as
mij = ρvivj + pij (5.7)
with
pij =
∫cicjf dξ . (5.8)
One can write the energy density as a sum of a kinetic energy and an internal energy
w =1
2ρ|v|2 + ρe . (5.9)
10

Here e is the internal energy per unit mass, defined by
ρe.=
1
2
∫|c|2f dξ . (5.10)
Similarly, the energy flow can be written as
ri = ρvi
(12|v|2 + e
)+ χi +
3∑
j=1
vjpij , (5.11)
where χ = (χ1, χ2, χ3) is the heat-flow
χi.=
1
2
∫|c|2ci f dξ . (5.12)
The evolution of the macroscopic quantities ρ, q, w can be derived from the Boltzmann equation
∂tf + ξ · ∇xf = Q(f), (5.13)
multiplying both sides by the collision invariants
φ0(ξ) ≡ 1 , φi(ξ) = ei · ξi (i = 1, 2, 3), φ4(ξ) =|ξ|22.
Observing that ∫φj(ξ)Q(f) dξ = 0 j = 0, 1, 2, 3, 4,
from (5.13) we obtain
∂
∂t
∫φj f dξ +
3∑
i=1
∂
∂xi
∫ξiφj f dξ = 0 .
In the cases j = 0, j = 1, 2, 3 and j = 4 respectively, one obtains
• conservation of mass:∂
∂tρ+
3∑
i=1
∂
∂xi(ρvi) = 0 , (5.14)
• conservation of momentum:
∂
∂t(ρvj) +
3∑
i=1
∂
∂xi(ρvivj + pij) = 0 j = 1, 2, 3, (5.15)
• conservation of energy:
∂
∂t
(ρ|v|22
+ ρe)+
3∑
i=1
∂
∂xi
ρvi
( |v|22
+ e)+ χi +
3∑
j=1
vjpij
= 0 . (5.16)
11

The above equations are in conservation form, showing that the integral of mass, momentumor energy over a given set Ω can change in time only because of a flux across the boundary ∂Ω. Inparticular, if this flux vanishes, then the total mass
M .=
∫
Ω
ρ dx ,
the total momentum
Q .=
∫
Ω
ρv dx ,
and the total energy
E .=
∫
Ω
(ρ|v|22
+ ρe)dx
inside Ω remain constant in time.
The equations (5.14)-(5.16) represent a system of 5 scalar conservation laws, which howeveris not closed. Indeed, the flux functions involve the additional quantities pij and χi which dependon higher moments of the distribution f(t, x, ·), according to (5.8), (5.12). In order to obtain ahyperbolic system of conservation laws, one can formally proceed as follows. Consider the equation
∂tfǫ + ξ · ∇xf
ǫ =1
ǫQ(f ǫ, f ǫ). (5.17)
When the relaxation parameter ǫ > 0 is very small, we expect that the function f ǫ will convergepointwise to an equilibrium distribution f such that Q(f , f) = 0. According to our previousanalysis, this must be a Maxwellian distribution
f(t, x, ξ) = A exp− β|ξ − v|2
.
For each (t, x), the coefficients A = A(t, x), β = β(t, x) and v = v(t, x) can be uniquely determinedby the condition that the densities of mass, momentum and energy in f(t, x, ·) should be the sameas for f(t, x, ·), namely ∫
IR3
f(t, x, ·) dξ =∫
IR3
f(t, x, ·) dξ ,∫
IR3
ξi f(t, x, ·) dξ =∫
IR3
ξi f(t, x, ·) dξ i = 1, 2, 3 ,
∫
IR3
|ξ|22f(t, x, ·) dξ =
∫
IR3
|ξ|22f(t, x, ·) dξ .
A direct computation yields
β =3
4e, A = ρ
(4
3πe
)−3/2
,
while v is given by (5.4). For the Maxwellian distribution f , the stress tensor is diagonal
pij =
23ρe if i = j,0 if i 6= j,
(5.18)
12

while the heat flow vector vanishes:
χi = 0 i = 1, 2, 3. (5.19)
Using (5.18) and (5.19) we can close the system of equations (5.14)-(5.16) and obtain
∂
∂tρ+
3∑
i=1
∂
∂xi(ρvi) = 0 , (5.20)
∂
∂t(ρvj) +
3∑
i=1
∂
∂xi
(ρvivj +
2
3ρe)= 0 j = 1, 2, 3, (5.21)
∂
∂t
(ρ|v|22
+ ρe)+
3∑
i=1
∂
∂xi
[ρvi
( |v|22
+5
3e)]
= 0 . (5.22)
The equations (5.20)–(5.22) represent a hyperbolic system of five conservation laws in three spacedimensions. For this system, an outstanding open problem is to prove the global existence ofentropy admissible weak solutions. One conjectures that these solutions can be obtained fromsolutions to the Boltzmann equation (5.17), letting the relaxation parameter ǫ tend to zero. Thiswould provide a rigorous justification to the formal arguments outlined in this section.
6 - The spatially homogeneous case
In this section we look at the space homogeneous case, where the velocity distribution f doesnot depend on x. The Cauchy problem thus takes the simpler form
∂tf = Q(f) , (6.1)
f(0, ξ) = f0(ξ) . (6.2)
We will show that the above problem can be reformulated as a continuous differential equation ina suitable Banach space. Global existence and uniqueness of solutions will thus follow from generalO.D.E. theory.
It will convenient to work in a space a weighted integrable functions, with norm
‖f‖1,s .=
∫(1 + ξ2)s/2
∣∣f(ξ)∣∣dξ . (6.3)
For s ≥ 2 we thus define the space of velocity distributions having moments up to order s:
L1s.=f : IR3 7→ IR , ‖f‖1,s <∞
.
Here and in the sequel, with slight abuse of notation we write ξ2.= |ξ|2. For future use, we record
the interpolation inequality
‖h‖1,3 ≤√
‖h‖1,4 · ‖h‖1,2 . (6.4)
13

To prove (6.4), we can assume h ≥ 0 and consider the absolutely continuous measure such thatdµ = h(ξ)dξ. Using Cauchy’s inequality one obtains
‖h‖1,3 =
∫(1 + ξ2)2/3 h(ξ) dξ =
∫(1 + ξ2) · (1 + ξ2)1/2 dµ
≤ ‖1 + ξ2‖L2(µ) ·∥∥(1 + ξ2)1/2
∥∥L2(µ)
=
(∫(1 + ξ2)2 h(ξ) dξ
)1/2
·(∫
(1 + ξ2)h(ξ) dξ
)1/2
= ‖h‖1/21,4 · ‖h‖1/21,2 .
Theorem 6.1. Assume that f0 ∈ L14 and f0(ξ) ≥ 0 for a.e. ξ. Then the Cauchy problem (6.1)-
(6.2) has a unique solution, defined for all t ≥ 0. The map t 7→ f(t) is continuously differentiableas a map with values in L1
2. Moreover, for every t ≥ 0 there holds
∫f(t, ξ) dξ =
∫f0(ξ) dξ ,
∫ (1 + ξ2
)f(t, ξ) dξ =
∫ (1 + ξ2
)f0(ξ) dξ . (6.5)
Toward a proof we observe that, by a possible rescaling of the time variable, it is not restrictiveto assume the normalization ∫
f(ξ) dξ = 1 . (6.6)
On the space L12 we consider a closed convex subset Ω of the form
Ω =
f ∈ L1
2 ; f(ξ) ≥ 0 for a.e. ξ ,
∫f(ξ) dξ = 1 ,
∫ (1 + |ξ|2
)f(ξ) dξ ≤ κ2 ,
∫ (1 + |ξ|2
)2f(ξ) dξ ≤ κ4
(6.7)
for some constants κ2, κ4 In order to apply a general theorem on O.D.E’s in Banach spaces, weneed to show that the collision operator f 7→ Q(f), as a map from Ω into L1
2, satisfies the following::
• Holder continuity.
• One-sided Lipschitz condition.
• Tangency condition.
We begin by proving some estimates on the collision kernel, in the norms ‖ · ‖1,s.
Lemma 6.2. The map f 7→ Q(f) is uniformly Holder continuous on L12, when restricted to the
domain Ω.
Proof. We shall consider the loss term Q− and the gain term Q+ separately. Let f, g ∈ Ω.Observing that
∣∣n · (ξ − ξ∗)∣∣ ≤ |ξ − ξ∗| ≤ |ξ|+ |ξ∗| =
(|ξ|2 + |ξ∗|2 + 2|ξ||ξ∗|
)1/2 ≤ (1 + ξ2)1/2(1 + ξ2∗)1/2, (6.8)
14

and using the interpolation inequality (6.4) we compute
∥∥Q−(f)−Q−(g, g)∥∥1,2
=
∫
IR3
(1 + ξ2
) ∫
IR3
∫
S2
∣∣n · (ξ − ξ∗)∣∣ |ff∗ − gg∗| dn dξ∗ dξ
≤ 2π
∫ ∫(1 + ξ2)3/2(1 + ξ2∗)
1/2 ·(∣∣f(ξ)− g(ξ)
∣∣ f(ξ∗) + g(ξ)∣∣f(ξ∗)− g(ξ∗)
∣∣)dξdξ∗
= 2π(∥∥f − g
∥∥1,3
‖f‖1,2 +∥∥f − g
∥∥1,2
‖g‖1,3)
≤ 2π(∥∥f − g
∥∥1/21,4
∥∥f − g‖1/21,2 ‖f‖1,2 +∥∥f − g
∥∥1,2
‖g‖1,3)
≤ 2π((2κ2)
1/2κ2 · ‖f − g‖1/21,2 + κ1/24 κ
1/22 · ‖f − g‖1,2
).
(6.9)
The estimate for the gain terms is entirely similar:
∥∥Q+(f)−Q+(g, g)∥∥1,2
=
∫
IR3
(1 + ξ2
) ∫
IR3
∫
S2
∣∣n · (ξ − ξ∗)∣∣ |f ′f ′
∗ − g′g′∗| dn dξ∗ dξ
≤∫
IR3
∫
IR3
∫
S2
[(1 + ξ′
2) + (1 + ξ′∗
2)] ∣∣n · (ξ′ − ξ′∗)
∣∣ |f ′f ′∗ − g′g′∗| dn dξ′∗ dξ′
≤ 2
∫ ∫ ∫ (1 + ξ2
)∣∣n · (ξ − ξ∗)∣∣ |ff∗ − gg∗| dn dξ∗ dξ
≤ 4π((2κ2)
1/2κ2 · ‖f − g‖1/21,2 + κ1/24 κ
1/22 · ‖f − g‖1,2
).
(6.10)
We have here used the symmetry of the collision kernel Q+ w.r.t. the variables ξ, ξ∗ . Together,(6.9) and (6.10) establish the lemma.
We remark that, taking g = 0, the above computations yield
∥∥Q(f)∥∥1,2
≤ 6π ‖f‖1,3 ‖f‖1,2 ≤ 6π κ1/24 κ
3/22 . (6.11)
Next, we show that the collision operator Q satisfies a one-sided Lipschitz estimate. Considerthe following semi-inner product on the space L1
2 :
〈f,w〉1,2 .= ‖f‖1,2 · [f,w]1,2 ,
where
[f,w]1,2.=
∫(1 + ξ2) signf(ξ) · w(ξ) dξ .
We recall that the collision operator Q replaces two particles with speeds ξ, ξ∗ with a cloud ofparticles with speeds ξ′, ξ′∗ uniformly distributed on the sphere having ξξ∗ as diameter. In thefollowing computation we use the symmetry of the integral expressing Q(f) w.r.t. the variables ξ
and ξ∗. Moreover, we use and the identity ξ2 + ξ2∗ = ξ′2+ ξ′∗
2and the upper bound (6.8) for the
15

distance |ξ − ξ∗|. This yields[f − g , Q(f)−Q(g)
]1,2
≤∫
IR3
∫
IR3
∫
S2
∣∣n · (ξ − ξ∗)∣∣ ·(
(1 + ξ′2) + (1 + ξ′∗
2))·∣∣f(ξ)f(ξ∗)− g(ξ)g(ξ∗)
∣∣
−[(1 + ξ2) sign
(f(ξ)− g(ξ)
)+ (1 + ξ2∗) sign
(f(ξ∗)− g(ξ∗)
)] (f(ξ)f(ξ∗)− g(ξ)g(ξ∗)
)dn dξ dξ∗
= 2π
∫ ∫|ξ − ξ∗| ·
((1 + ξ2) + (1 + ξ2∗)
)· 12
∣∣∣(f + g)(ξ)(f − g)(ξ∗) + (f + g)(ξ∗)(f − g)(ξ)∣∣∣
−[(1 + ξ2) sign
(f(ξ)− g(ξ)
)+ (1 + ξ2∗) sign
(f(ξ∗)− g(ξ∗)
)]
· 12
[(f + g)(ξ)(f − g)(ξ∗) + (f + g)(ξ∗)(f − g)(ξ)
]dξ dξ∗
= 2π
∫ ∫|ξ − ξ∗| ·
(1 + ξ2) ·
∣∣∣(f + g)(ξ)(f − g)(ξ∗) + (f + g)(ξ∗)(f − g)(ξ)∣∣∣
− (1 + ξ2) sign(f(ξ)− g(ξ)
)·[(f + g)(ξ)(f − g)(ξ∗) + (f + g)(ξ∗)(f − g)(ξ)
]dξ dξ∗
≤ 2π
∫ ∫|ξ − ξ∗| · (1 + ξ2) ·
[(f + g)(ξ)|f − g|(ξ∗) + (f + g)(ξ∗)|f − g|(ξ)
]
+[(f + g)(ξ)|f − g|(ξ∗)− (f + g)(ξ∗)|f − g|(ξ)
]dξ dξ∗
≤ 4π
∫ ∫(1 + ξ2)1/2(1 + ξ2∗)
1/2 · (1 + ξ2) · (f + g)(ξ)(f − g)(ξ∗) dξ dξ∗
= 4π ‖f + g‖1,3 · ‖f − g‖1,2≤ 8πκ4 · ‖f − g‖1,2 .
(6.12)
We now consider the tangency condition. Since the collision operator preserves total mass andenergy, for every f ∈ Ω and h > 0 we have∫ (
f(ξ)+hQ(f)(ξ))dξ = 1 ,
∫(1+ξ2) ·
(f(ξ)+hQ(f)(ξ)
)dξ =
∫(1+ξ2) ·f(ξ) dξ ≤ κ2 .
(6.13)Moreover, the vector Q(f) is tangent to the positive cone Γ+
.=f ∈ L1
2 ; f(ξ) ≥ 0
simplybecause Q(f)(ξ) ≥ 0 whenever f(ξ) = 0.
The forthcoming analysis will establish the a priori bound ‖f‖1,4 ≤ κ4, provided that theconstant κ4 is suitably large. This will require further estimates on the collision kernel.
Lemma 6.3 (Povzner). For every f ∈ L1s with f ≥ 0 and s ≥ 2, one has the estimate
∫ (1 + |ξ|2
)s/2Q(f) dξ ≤ Cs · ‖f‖1,s‖f‖1,2 (6.14)
for some constant Cs, with Cs → 0 as s→ 2.
Proof. We first observe that, for any p ≥ 1 there exists a constant C ′p such that
ap + bp ≤ (a+ b)p ≤ ap + bp + C ′p(a
1/2bp−(1/2) + ap−(1/2)b1/2) (6.15)
16

for any numbers a, b ≥ 0. Moreover, C ′p → 0 as p→ 1.
If now ξ, ξ∗, ξ′, ξ′∗ are related as in (1.1), then by (6.15)
(1+ξ′2)s/2 + (1 + ξ′∗2)s/2 ≤
[1 + ξ′2 + 1 + ξ′∗
2]s/2
=[1 + ξ2 + 1 + ξ2∗
]s/2
≤ (1 + ξ2)s/2 + (1 + ξ2∗)s/2 + C ′
s/2 ·((1 + ξ2)1/2(1 + ξ2∗)
(s−1)/2 + (1 + ξ2)(s−1)/2(1 + ξ2∗)1/2)
(6.16)By the action of the collision kernel Q, a couple of particles with speeds ξ, ξ∗ is replaced by
particles whose speeds are uniformly distributed on the sphere Sξξ∗ . Using (6.8) and then (6.16)to cancel the leading order terms, we thus obtain∫ (
1 + |ξ|2)s/2
Q(f) dξ ≤∫ ∫ ∫ ∣∣n · (ξ − ξ∗)
∣∣ f(ξ)f(ξ∗)
·∣∣∣(1 + ξ′2)s/2 + (1 + ξ′∗
2)s/2 − (1 + ξ2)s/2 − (1 + ξ2∗)s/2∣∣∣ dn dξ∗dξ
≤ π
∫ ∫(1 + ξ2)1/2(1 + ξ2∗)
1/2 f(ξ)f(ξ∗)
· C ′s/2
[(1 + ξ2)1/2(1 + ξ2∗)
(s−1)/2 + (1 + ξ2)(s−1)/2(1 + ξ2∗)1/2]dξ∗dξ
≤ Cs · ‖f‖1,s‖f‖1,2 ,with Cs = 2π C ′
s/2.
The estimate (6.14) provides an a-priori bound on the L1s norm of a solution. Namely, by
mass and energy conservation there holds∥∥f(t)
∥∥L1
=∥∥f0∥∥L1
∥∥f(t)∥∥1,2
=∥∥f0∥∥1,2
(6.17)
for all t ≥ 0. In turn, (6.14) implies
d
dt
∥∥f(t)∥∥1,s
≤ Cs‖f0‖1,2 ·∥∥f(t)
∥∥1,s,
∥∥f(t)∥∥1,s
≤ expCs‖f0‖1,2 · t
· ‖f0‖1,s . (6.18)
A sharper estimate is now given. First, consider the case of a particle with speed 0 collidingwith a particle with speed ξ (each particle having unit mass). The result is a cloud of particles(with total mass = 2) uniformly distributed along the sphere S0ξ , having a diameter joining thepoints 0 with ξ, and radius R = |ξ|/2. Setting
r(θ) = 2R cos θ , x(θ) = R (1 + cos 2θ) ,
we now compute the momentum of order s of this cloud of particles (fig. 7)
Is.=
2
4πR2
∫
S0ξ
|ξ′|s dσ
=1
2πR2
∫ π/2
0
[r(θ)
]s · 2πR∣∣dx(θ)
∣∣
=1
2πR2
∫ π/2
0
(2R cos θ)s · 2πR · 2R sin 2θ dθ
= (2R)s∫ π/2
0
(4 cos θ)s+1 sin θ dθ
= |ξ|s · 4
s+ 2.
(6.19)
17

ξR x (θ)
r (θ)
02θθ
figure 7
Notice that when s = 2 we have Is = |ξ|s. Otherwise
Is < |ξ|s s > 2 .
This reflects the fact that collisions conserve the energy norm, but dissipate higher norms L1s with
s > 2. By a simple rescaling argument we obtain
Lemma 6.4. For each s > 2 and any λ ∈]4/(s+2) , 1
[, one can find a constant α large enough
so that the following holds. If |ξ| ≥ α(1 + |ξ∗|
), then
2
π |ξ − ξ∗|2∫
Sξξ∗
(1 + |ξ′|2)s/2 dσ ≤ λ[(1 + ξ2)s/2 + (1 + ξ2∗)
s/2], (6.20)
where dσ denotes the surface area on Sξξ∗ .
Proof. If the conclusion of the lemma fails, then there exists a sequence of couples ξν , ξν∗ with
|ξν∗ | ≥ 1 ,|ξν ||ξν∗ |
→ ∞ ,
such that (6.20) fails for every ν. Set
ζν.=
2ξν
|ξν | , ζν∗.=
2ξν∗|ξν | .
As ν → ∞, by possibly taking a subsequence we can assume that ζν converges to some vector ζ.Clearly ζν∗ → 0. Hence the sphere whose diameter is the segment joining ζν∗ with ζν approaches
18

a sphere with unit radius, whose diameter is the segment with endpoints 0, ζ. Using (6.9) withR = 1 we thus find
limν→∞
1(1 + |ξν |2)s/2 · 2
π |ξν − ξν∗ |2∫
Sξνξν∗
(1 + |ξ′|2
)s/2dσ
=1
|ζ|s · 2
π |ζ|2∫
S0ζ
|ζ ′|s dσ =4
s+ 2> λ .
This contradiction establishes the lemma.
Lemma 6.5. Let t 7→ f(t) be a solution of the homogeneous Boltzmann equation (6.1), with∥∥f(t)∥∥1,2
≤ κ2 and∥∥f(t)
∥∥1,s
locally bounded, for some s > 2. Then there exist a constant κsdepending only on s and κ2 such that
d
dt
∥∥f(t)∥∥1,s
≤ 0 whenever ‖f(t)‖1,s ≥ κs . (6.21)
0 *ξ
ξ
figure 8
The situation is illustrated in fig. 8. If the norm ‖f‖1,2 is small, most particles have smallspeed, contained in a neighborhood V of the origin. However, if the norm ‖f‖1,s is very large,there must be a few particles having very large speed. By the interactions between these highspeed particles and other slow particles, the L1
s norm is dissipated, as shown in Lemma 6.4.
Proof of Lemma 6.5. If t 7→ f(t) is a solution, its L12 norm is clearly constant in time. Assume
‖f‖1,2 ≤ κ2. For a given s > 2, choose constants λ < 1 and α according to Lemma 6.4. Define theradius
ρ.=
√2κ2 .
Recalling the normalization∫f(ξ)dξ = 1, this implies
∫
|ξ∗|≤ρ
f(ξ∗) dξ∗ >1
2.
19

In the integral expression for Q(f), we now split the domain IR3 × IR3 = Γ ∪ Γ′, setting
Γ′ .=(ξ, ξ∗) ; ξ∗ ≤ ρ , ξ ≥ α(1 + ρ)
, Γ
.= IR3 × IR3 \ Γ′ .
Using the two previous lemmas we find
d
dt
∥∥f(t)‖1,s =∫ ∫
Γ∪Γ′
∫
S2
∣∣n · (ξ − ξ∗)∣∣ f(ξ)f(ξ∗)
·[(1 + ξ′2)s/2 + (1 + ξ′∗
2)s/2 − (1 + ξ2)s/2 − (1 + ξ2∗)s/2]dn dξ∗dξ
≤ Cs ·∥∥f(t)
∥∥1.2
∥∥f(t)∥∥1,s
− (1− λ)
∫ ∫
Γ′
|ξ − ξ∗|(1 + ξ2)s/2f(ξ)f(ξ∗) dξdξ∗
≤ Cs ·∥∥f(t)
∥∥1.2
∥∥f(t)∥∥1,s
− 1− λ
2
∫
|ξ|≥α(1+ρ)
(1 + ξ2)1/2
2(1 + ξ2)s/2f(ξ) dξ .
(6.22)
We now apply Jensen’s inequality
Ψ
(∫
X
udµ
)≤∫
X
Ψ(u) dµ
to the convex function Ψ(y) = y(s+1)/s and to the probability measure dµ = f(ξ)dξ, with u(ξ) =(1 + ξ2)s/2. This yields
(∫(1 + ξ2)s/2f(ξ) dξ
)(s+1)/s
≤∫
(1 + ξ2)(s+1)/2f(ξ) dξ
≤∫
|ξ|≥α(1+ρ)
(1 + ξ2)(s+1)/2f(ξ) dξ +(1 + α2(1 + ρ)2
)(s+1)/2.
(6.23)Using (6.23) to provide a lower bound on the negative term on the right hand side of (6.22), weobtain
d
dt‖f‖1,s ≤ Cs · ‖f‖1,2‖f‖1,s −
1− λ
4‖f‖(s+1)/s
1,s +1− λ
4
(1 + 2α2(1 + ρ2)
)(s+1)/2. (6.24)
The left hand side of (6.24) is ≤ 0 provided that ‖f‖1,s is large enough.
Recalling that λ < 1 and s > 2, the equation (6.24) can be compared with the O.D.E.
z = −a z(s+1)/s + bz + c (6.25)
with
a =1− λ
4, b = Cs ‖f‖1,2 , c =
(1 + 2α2(1 +
√2κ2)
2)(s+1)/2
.
For z large, the right hand side of (6.25) is < −(a/2)z(s+1)/s. By a comparison with the O.D.E.
z = −a2z(s+1)/s,
we conclude that every solution will satisfy
∥∥f(t)∥∥1,s
≤ K · (1 + t−s) s > 2 , t > 0 , (6.26)
20

where the constant K = K(s, ‖f0‖1,2
)depends only on s and on the L1
2 norm of the initial data.
Corollary 6.6. For any given κ2, there exists a constant κ4 such that the following holds. If
‖f‖1,2 ≤ κ2 , ‖f‖1,4 ≥ κ4 ,
then ∫(1 + ξ2)2Q(f)(ξ) dξ ≤ 0 . (6.27)
Thanks to the above estimates, we can now establish Theorem 2 by applying a general existencetheorem for O.D.E’s in a Banach space. Indeed, we have shown that the map f 7→ Q(f) is uniformlybounded and Holder continuous on the closed convex set Ω ⊂ L1
2. Moreover, it satisfies the one-sided Lipschitz condition
⟨f − g , Q(f)−Q(g)
⟩1,2
.= ‖f − g‖1,2 ·
[f − g , Q(f)−Q(g)
]1,2
≤ 8πκ4 · ‖f − g‖21,2 ,
together with the tangency condition
limh→0+
1
hdist.
(f + hQ(f) ; Ω
)= 0 f ∈ Ω .
By applying Theorem A1 in the Appendix, we now obtain the global existence of a unique solutionto the Cauchy problem (6.1)-(6.2).
7 - Pointwise bounds
In this chapter we consider the case of bounded initial data. Our goal is to establish uniformL∞ bounds valid for all times. We always assume that the density is normalized as in (6.6).
Theorem 7.1. In the same setting as Theorem 6.1, assume that the initial data is bounded andhas finite entropy, so that
‖f0‖L∞ <∞ , H0.=
∫f0(ξ) ln f0(ξ) dξ <∞ . (7.1)
Moreover, assume that
supE
∫
E
f(ξ) dξ <∞ ,
the supremum being taken over all two-dimensional planes E ⊂ IR3. Then the solution remainsuniformly bounded, i.e.
∥∥f(t, ·)∥∥L∞ ≤ C for all t ≥ 0.
Proof. We proceed in several steps.
1. We claim that there exists a constant c0 > 0 depending only on the entropy H0, such that
∫|ξ∗ − ξ| f(ξ∗) dξ∗ ≥ c0 (7.2)
21

for all ξ ∈ IR3, t ≥ 0. Indeed, we can find r1 > 0 sufficiently small such that r ∈ [0, r1] and
∫
|ξ∗−ξ|≤r
f(ξ∗) dξ∗ ≥ 1
2
together imply ∫
|ξ∗−ξ|≤r, ,f(ξ∗)>r−1
f(ξ∗) dξ∗ ≥ 1
4. (7.3)
If (7.3) holds, then
H0 ≥∫f(ξ∗) ln f(ξ∗) dξ∗ ≥
∫
|ξ∗−ξ|≤r, f(ξ∗)>r−1
f(ξ∗) | ln r| dξ∗ ≥ | ln r|4
.
Therefore, setting r0.= min
r1 , e
−4H0
, for every ξ ∈ IR3 the above estimates yield
∫
|ξ∗−ξ|≤r0
f(ξ∗) dξ∗ ≤ 1
2,
∫|ξ∗ − ξ| f(ξ∗) dξ∗ ≥
∫
|ξ∗−ξ|>r0
|ξ∗ − ξ| f(ξ∗) dξ∗ ≥ r02,
proving (7.2).
’ξξE
ξ
’∗ξ
’ξ
figure 9
2. We shall need an alternative expression for the gain term (fig. 9). In order to produce a particlewith speed ξ, one can first choose a particle with arbitrary speed ξ′. This has to interact withsome other particle whose speed ξ′∗ lies in the plane Eξξ′ through ξ perpendicular to ξ′ − ξ. Thismotivates the formula
Q+(f)(ξ) =
∫1
|ξ′ − ξ|
(∫
Eξξ′
f(ξ′∗) dξ′∗
)f(ξ′) dξ′ . (7.4)
22

The factor |ξ′ − ξ|−1 comes from (1.6) through a change of variables. A rigorous justification of(7.4) requires some care, because one cannot regard ξ′ ∈ IR3 and ξ′∗ ∈ IR2 as independent variables.Indeed, the range of ξ′∗ ∈ Eξξ′ itself depends on ξ
′.To establish (7.4) we thus proceed as follows. Fix ξ† ∈ IR3 and let ξ′∗ range in the fixed
plane Eξξ† passing through ξ and perpendicular to ξ† − ξ (see fig. 10a). For each triple (s,n, ξ) ∈IR+ × S2 ×Eξξ† we consider the two speeds
ξ′.= sn , ξ′∗ = πE ξ , (7.5)
where πE denotes the perpendicular projection on the plane Eξξ′ . When ξ′ = ξ†, the determinant
of the map (s,n, ξ) 7→ (ξ′, ξ′∗) defined at (7.5) is computed as (see fig. 10b)
det
(∂(ξ′, ξ′∗))
∂(s, n, ξ)
)= det
(∂(sn , πE ξ)
∂(s, n, ξ)
)= det
(∂(sn)
∂(s, n)
)= s2 .
Therefore, from (1.6) (with α = 1) it follows
Q+(f)(ξ) =
∫
IR3
∫
Eξξ′
s · f(ξ′∗) f(ξ′) ·1
s2dξ′∗ dξ
′,
proving (7.4).
ξ*’
’= sn
dn10 s
dξ’
Eξξ
~
ξ
ξ
ξ
figure 10a figure 10b
We now consider the quantities
J(ξ).=
∫
|ξ′ − ξ| f(ξ′) dξ′, I(E)
.=
∫
E
f(ξ) dξ .
From (7.4) it followsQ+(f)(ξ) ≤ J(ξ) · sup
EI(E) , (7.6)
23

where the supremum is taken over all planes E ⊂ IR3.
3. For any plane E and δ > 0, denote by Eδ the set of points whose distance from E is ≤ δ. Asusual, Sξξ∗ is the sphere having the segment ξξ∗ as diameter. Using (7.2) we compute
d
dtI(E) =
∫
E
[Q+(f)(ξ)−Q−(f)(ξ)
]dξ
≤∫ ∫
f(ξ)f(ξ∗)
|ξ − ξ∗|
[limδ→0
1
2δ·meas
(Sξξ∗ ∩Eδ
)]dξdξ∗ − 2π
∫
E
f(ξ)
∫|ξ∗ − ξ| f(ξ∗) dξ∗dξ
≤ π
∫ ∫f(ξ)f(ξ∗) dξdξ∗ − 2πc0
∫
E
f(ξ)dξ
≤ π(1− 2c0I(E)).
(7.7)Indeed, the area of the portion of the sphere Sξξ∗ which is contained inside Eδ satisfies
meas(Sξξ∗ ∩Eδ
)≤ 2δ · 2πR , R
.=
|ξ − ξ∗|2
.
4. Setting ξ0.= (ξ1 + ξ2)/2 and writing dσ for the element of area on the sphere Sξ1ξ2 , recalling
(7.2) we compute
d
dtJ(ξ) =
∫Q+(f)(ξ
′)−Q−(f)(ξ′)
|ξ′ − ξ| dξ′
≤∫ ∫
1
|ξ1 − ξ2|
(∫
Sξ1ξ2
1
|ξ′ − ξ| dσ(ξ′)
)f(ξ1)f(ξ2) dξ1dξ2
− 2π
∫f(ξ′)
|ξ′ − ξ| dξ′ ·∫
|ξ∗ − ξ| f(ξ∗)dξ∗
≤∫ ∫
1
|ξ1 − ξ2|
(∫
Sξ1ξ2
1
|ξ′ − ξ0|dσ(ξ′)
)f(ξ1)f(ξ2) dξ1dξ2 − 2π J(ξ) c0
= 4π − 2πc0J(ξ) .
(7.8)
5. By (7.7) and (7.8), the quantities
J.= sup
ξJ(ξ) , I
.= sup
EI(E) ,
remain uniformly bounded for all times t ≥ 0. By (7.6) and (7.2) we have
d
dtf(t, ξ) = Q+(f)(ξ)−Q−(f)(ξ) ≤ J I − 2πc0f(t, ξ) . (7.9)
This differential inequality implies
f(t, ξ) ≤ max
J I
2πc0, ‖f0‖L∞
for evry t ≥ 0 and a.e. ξ ∈ IR3.
24

Appendix: O.D.E. theory in Banach spaces
We review here some existence and uniqueness results for abstract O.D.E’s, which were usedin Section 6.
Let E be a Banach space with norm ‖ · ‖, and let g : E 7→ E be a Lipschitz continuousmapping, so that ∥∥g(u)− g(v)
∥∥ ≤ L ‖u− v‖ u, v ∈ E . (A.1)
It is well known that in this case the Cauchy problem
u = g(u) , u(0) = u0 (A.2)
has a unique solution, which can be obtained as the fixed point of the Picard integral operatoru 7→ Pu, with
Pu(t) = u0 +
∫ t
0
g(u(s)
)ds . (A.3)
Moreover, solutions depend continuously on the initial data. Indeed
d
dt
∥∥u(t)− v(t)∥∥ ≤
∥∥∥g(u(t)
)− g(v(t)
)∥∥∥ ≤ L ·∥∥u(t)− v(t)
∥∥ . (A.4)
Hence, by Gronwall’s lemma,
∥∥u(t)− v(t)∥∥ ≤ eLt‖u0 − v0‖ t ≥ 0 . (A.5)
In order to achieve (A.5), the assumption of Lipschitz continuity can be greatly relaxed. Forexample, if E is a Hilbert space with inner product 〈·, ·〉, assume that g is a continuous mappingsuch that ⟨
u− v , g(u)− g(v)⟩≤ L ‖u− v‖2 u, v ∈ E . (A.6)
Then the computations at (A.4) can be replaced by
d
dt
∥∥u(t)− v(t)∥∥2 ≤ 2
⟨u(t)− v(t) , g
(u(t)
)− g(v(t)
)⟩≤ 2L ·
∥∥u(t)− v(t)∥∥2 . (A.7)
Hence, for t ≥ 0, ∥∥u(t)− v(t)∥∥2 ≤ e2Lt‖u0 − v0‖2
and (A.5) still holds.
We now examine how the one-sided Lipschitz estimate (A.6) can be reformulated in the contextof a general Banach space. Observe that, still in a Hilbert space,
〈u,w〉‖u‖ = lim
s→0
〈u+ sw , u+ sw〉1/2 − 〈u, u〉1/2s
= lims→0
‖u+ sw‖ − ‖u‖s
. (A.8)
Notice that the right hand side of (A.8) is well defined also in an arbitrary Banach space. Indeed,for every fixed u,w ∈ E, the map s 7→ ‖u + sw‖ is convex, being the composition of a linearfunction with a convex one. Moreover, it is globally Lipschitz continuous because
‖u− sw‖ − ‖u− s′w‖ ≤ |s− s′‖ · ‖w‖ .
25

Therefore, there exists the (possibly distinct) limits
[u,w]−.= lim
s→0−
‖u+ sw‖ − ‖u‖s
≤ lims→0+
‖u+ sw‖ − ‖u‖s
.= [u,w]+ . (A.9)
Motivated by (A.8), for u,w ∈ E we thus define the upper and lower semi-inner products
〈u,w〉+ .= ‖u‖ · [u,w]+ , 〈u,w〉− .
= ‖u‖ · [u,w]− .
In a Hilbert space the norm is smooth and we clearly have 〈u,w〉+ = 〈u,w〉− = 〈u,w〉. In a generalBanach space there holds
−‖u‖ ‖w‖ ≤ 〈u,w〉− ≤ 〈u,w〉+ ≤ ‖u‖ ‖w‖ .
We are now ready to formulate a general result on the well-posedness of the Cauchy problemfor an O.D.E. in a Banach space. In the following, the distance of a point v from the set Ω is ofcourse defined as
dist. (v; Ω).= inf
ω∈Ω‖v − ω‖ .
Theorem A1 (Global existence and uniqueness of solutions). Consider:
• A Banach space E, with norm ‖ · ‖ and lower semi-inner product 〈·, ·〉.
• A closed, convex subset Ω ⊂ E.
• A bounded, continuous mapping g : Ω 7→ E satisfying the one-sided Lipschitz condition
⟨u− v , g(u)− g(v)
⟩−
≤ L ‖u− v‖2 u, v ∈ Ω (A.10)
and the tangency condition
lim infh→0+
1
hdist.
(u+ hg(u) ; Ω
)= 0 u ∈ Ω . (A.11)
In the above setting, for every initial data u0 ∈ Ω, the Cauchy problem
d
dtu = g(u) , u(0) = u0 (A.12)
has a unique solution t 7→ u(t) ∈ Ω, defined for all t ≥ 0.
Proof. Fix an arbitrarily large time interval [0, T ]. Following [M], the solution will be constructedas a limit of polygonal approximations.
1. By the boundedness assumption, there exists a constant M such that
∥∥g(u)∥∥ ≤M u ∈ Ω . (A.13)
26

u
g
u0
u(t )2
u(t )1
u(t )
u(t )
α
β
u(T)Ω
u’ u
u+hg(u)figure 11
Let ε > 0 be given. For any u ∈ Ω, by the continuity of g and the tangency condition (A.11), wecan find u′ ∈ Ω and h > 0 such that
∥∥u′ − u− h g(u)∥∥
h≤ ε
2,
∥∥g(u)− g(v)∥∥ ≤ ε
2if ‖u− v‖ ≤ (M + 1)h .
As a consequence, the linear map
s 7→ v(s) = u+ s(u′ − u) s ∈ [0, h]
satisfiesu(s) ∈ Ω ,
∥∥∥u(s)− g(u(s)
)∥∥∥ ≤ ε (A.14)
for s ∈ [0, h].2. Given ε > 0, we construct an ε-approximate solution u : [0, τ ] 7→ Ω by transfinite induction(fig. 11). Namely, by Step 1 there exists t1 > 0 and affine map u : [0, t1] 7→ Ω such that (A.14)holds for t ∈ [0, t1].
Next, assume that a piecewise affine map u : [0, τ [ 7→ Ω has been constructed, and satisfies(A.14) for a.e. t < τ . Here τ = supα≺β tα. Since g is bounded, the map u is Lipschitz continuous,hence the value u(τ) = limt→τ− u(t) is certainly well defined. If τ = T we are done. Otherwise,we have two cases:
(i) If β is a limit ordinal, we simply define
tβ = supα≺β
tα , u(tβ) = limt→tβ−
u(t) .
27

(ii) If β is a successor ordinal, then we apply step 1 with u = u(tβ−1).
This allows us to extend the ε-approximate solution to a larger interval [0, tβ ]. Since tα+1 > tαfor every α, we must have tα∗ ≥ T for some countable ordinal α∗.
3. Finally, consider a sequence of approximate solutions uε, with ε → 0. We claim that thissequence is Cauchy. Indeed, let uε, vε be two ε-approximate solutions. By our previous constructionwe can find a decomposition of the form
[0, T ] =
(⋃
α
Iα
)∪N ,
where the Iα are countably many open intervals where uε and vε are both affine, andN has measurezero. The distance function t 7→
∥∥uε(t)− vε(t)∥∥ is Lipschitz continuous. Moreover, recalling (A.9),
the dissipativity assumption (A.10) implies
d
dt
∥∥uε(t)− vε(t)∥∥ =
[uε(t)− vε(t) , uε(t)− vε(t)
]−
≤[uε(t)− vε(t) , g
(uε(t)
)− g(vε(t)
)]−+ 2ε
≤ L∥∥uε(t)− vε(t)
∥∥+ 2ε .
for a.e. t ∈ [0, T ]. In turn, this implies
∥∥uε(t)− vε(t)∥∥ ≤ 2ε
eLt
L.
As ε→ 0, we thus have the convergence uε → u uniformly on [0, T ]. The function u(·) is clearly asolution to the Cauchy problem, because of the continuity of g.
Remark. As usual, the boundedness assumption on g can be replaced by the assumption ofsub-linear growth ∥∥g(u)
∥∥ ≤ C(1 + ‖u‖
).
Basic References
[C] C. Cercignani, The Boltzmann Equation and its Applications, Springer, New York, 1988.
[CIP] C. Cercignani, R. Illner and M. Pulvirenti, The Mathematical Theory of Dilute Gases, Springer-Verlag, 1994.
[M] R. Martin Jr., Functional Analysis and Differential Equations in Banach Spaces, Wiley Inter-science, 1975.
[V] C. Villani, A review of mathematical topics in collisional kinetic theory, in Handbook of Math-ematical Fluid Mechanics, S. Friedlander and D. Serre Eds., Elsevier Science, 2002.
28