Modellbasierte und komponentenorientierte HS Augsburg · PDF file · 2017-03-21DH...
39
Modellbasierte und komponentenorientierte Softwareentwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 1 HS Augsburg Fak. Informatik CIM & Robotik Prof. G. Stark 1. Vorstellung Labor für CIM & Robotik 2. Zielkriterien für die Softwareentwicklung 3. Programmierparadigmen und Entwicklungsprozess 4. Modellbasierte Entwicklung 5. Komponentenorientierte Entwicklung 6. Anwendungsbeispiele 7. Ausblick auf neue Verfahren und Technologien Modellbasierte und komponentenorientierte Softwareentwicklung für Eingebettete Systeme Hochschule Augsburg, Labor für CIM & Robotik, Prof. Georg Stark Email: [email protected]
Transcript of Modellbasierte und komponentenorientierte HS Augsburg · PDF file · 2017-03-21DH...

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 1
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
1. Vorstellung Labor für CIM & Robotik
2. Zielkriterien für die Softwareentwicklung
3. Programmierparadigmen und Entwicklungsprozess
4. Modellbasierte Entwicklung
5. Komponentenorientierte Entwicklung
6. Anwendungsbeispiele
7. Ausblick auf neue Verfahren und Technologien
Modellbasierte und komponentenorientierteSoftwareentwicklung für Eingebettete Systeme
Hochschule Augsburg, Labor für CIM & Robotik, Prof. Georg StarkEmail: [email protected]

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 2
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Vorstellung Labor CIM & Robotik

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 3
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Schwerpunkte F & E
� Praktische Robotik- Neue Programmierverfahren- Weiterentwicklung eigene Software MRobot- Sensorbasierte Steuerungsfunktionen- Kooperierende Systeme
� Angewandte Robotik- Mobile Roboter- Assistenzroboter für die Fertigung
� 3D-Bildverarbeitung- ATOS-Kamerasystem, Fa. GOM

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 4
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Programmierung mit 3D -Bilddaten

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 5
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Automatischer Test von Bedieneinrichtungen

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 6
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Vermessung mit 3D -Bilddaten

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 7
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Fräsen von Zahnkronen

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 8
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
3D-Bildverarbeitung: Olympia-Kajak

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 9
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Messepräsentation mit Mathworks

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 10
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Forschungsprojekt ECHORD -KANMAN
� Greiferkamera mit eigener Software MRobotAndocken und Objekterkennung
� Kanban-FertigungsprozessUnterstützung durch mobile Robotersysteme
Greiferkamera

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 11
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Allgemeine Zielkriterien für Softwareentwicklung
� Gute Wartbarkeit der Software
- Fehlerbeseitigung
- Erweiterungen
� Optimaler Informationsfluss zwischen allen beteiligten Personengruppen
� Kosteneffizienz
� Hohe Funktionalität der Software

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 12
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Besonderheit bei Eingebetteten Systemen
� Enge Kopplung zum technischen Prozess
� Verteilte Systeme mit hoher Dynamik
� Hohe Zuverlässigkeit gefordert
� Wartungsfreundlichkeit und Portierbarkeit der Software
Was sind Eingebettete Systeme?
Rechnersysteme, fest integriertin einen technischen Kontext

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 13
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Wichtige Anwendungsgebiete
MechatronikRobotik
KonsumVerkehr Automation Medizin ...

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 14
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Anwendung - Mechatronische Systeme
Abstands-/Kraft-Regelung
Stromnetz
3D-Lageerfassung
Datenfluss
Antrieb Mechanik Effektor Werkstück
Energiefluss Materialfluss
Sensor - Lage - Kraft
Regelung/Steuerung
Bahnsteuerung
Anwendungsprogramm
Schnittstelle Bedienung Rechnernetz
Bediengerät

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 15
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Darstellung des Programmwissens in der Entwurfsebene
Produktidee Formales Modell
abstrakt
Architektur Teilstrukturen
Entwurf - Konkretisierung
Analyse - Formalisierung
formal
•
•
Binärcode
Komponente
•
• konkret
nichtformal
•
• Klasse/Funktion
Paradigmen

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 16
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Alternative Ansätze bei Programmier-Paradigmen
� Primäre Darstellung- prozedural- deklarativ
� Unterstützung der Wissensdomäne- Struktur des Wissens- Inhaltliche Darstellung des Wissens
� Abstraktionsebene (Semantische Lücke)

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 17
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Vergleich der Paradigmen
hochInhaltdeklarativModellbasiert
hochInhaltdeklarativDatenfluss-
orientiert
hochStrukturdeklarativKomponenten-
orientiert
mittelStrukturdeklarativObjektorientiert
niedrigProzess (parallel,
sequentiell)
prozeduralImperativ
Abstraktions-ebene (Semantik)
WissensdomänePrimäre Darstellung
Paradigma

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 18
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Modellbasierte Entwicklung
� Formale, abstrakte Darstellung der Wissensinhalte- keine Realisierungsdetails- weitgehende Plattformunabhängigkeit
� Unterschiedliche Modellbegriffe
- Reale Systeme / Prozesse- Datenstrukturen
� Domänenspezifische Sprache
- einfach und prägnant
- Benutzung ohne umfangreiche Programmierkenntnisse
� Simulation und Codegenerierung
Was ist die Besonderheit ?

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 19
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Domänensprachen Text/Grafik
% Transformation P2 nach KR
xk=u1-mk; xk=xk/norm(xk);
yk=cross(zk, xk);
KR=[xk yk zk mk; 0 0 0 1];
P2_KR=inv(KR) * P2;
phi=atan2(P2_KR(2,4),P2_KR(1,4));
Matlab-Skript Labview - Grafik

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 20
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Beispiel - Zustandsmodell Bewegung
Bahnsatz
Modellzustand: Bewegungszustand
Modellparameter: - Geschwindigkeitsprofile
Modellfunktionen: - Zustandsübergang, Raum-/Zeit-Interpolation Achssollwerte
Trajektorie
Roboter - Bahnsteuerung

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 21
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
alpha = atan2(hy1,hx1);
beta = acos( (oa^2 - ua^2 + l^2)/(2 * l * oa) );
gamma= acos( (oa^2 + ua^2 - l^2)/(2 * oa * ua) );
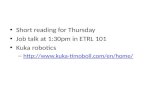
Roboter - Kinematikmodell
DH0,1(θ1)
{K2}
{K1}
{K0}
θθθθ2
A1
y0
A4
A2
A3
θθθθ1
α1 a1
d1
x0
z0
dhp = [ 0 0.4 0 -pi/2;
0 0 0.2 0;-pi/2 0 0 -pi/2;
0 0.3 0 -pi/2;
0 0 0 pi/2;0 0.1 0 0 ];

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 22
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Modell Abstandsregelung
Regler
dqkorr
Pumgebung
Pist q
- Roboter ΣΣΣΣ qkorr +
SensorPist
-
SensorPsoll J-1
FlanschdPkorr SensordP
BasisTSensor
SensordPkorr
Pprog
Kinematikmodell
P: kartesische Werte, q: achsbezogene Werte
Abstandssensor

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 23
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Komponentenorientierte ProgrammierungLeitgedanken
� Softwarekomponenten sind ausführbare Softwareteile, die über standardisierte Schnittstellen benutzt werden.
� Mit Hilfe von Komponenten kann eine Framework-Plugin-Architektur realisiert werden.
� Softwarekomponenten können mit beliebigen Programmiersprachen implementiert werden.
� Softwarekomponenten können dynamisch erzeugt werden.
� Beispiele für standardisierte Schnittstellen:- COM von Microsoft- CORBA von der OMG (www.omg.org),- JavaBeans- TCP/IP, UDP (allg. Netzwerkprotokolle)

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 24
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Komponentenstrktur MRobot / SunSim
CAN-Bus
Weitere ...
COM
Anwendungs-programmierung
Bahnsteuerung (Matlab-Skript)
Echtzeitkern
(C++)
3D-Grafik
(C++)
Roboter
COM
UDP

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 25
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Anwendungsbeispiele
Synchrone Robotersteuerung und Simulation

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 26
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Sensorsteuerung

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 27
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Schreiben – ELECTRONICA 2012

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 28
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Objektlokalisierung mit Greiferkamera

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 29
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Nullraum -Steuerung KUKA youBot

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 30
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Simulationskomponente für KUKASunrise Workbench

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 31
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Simulation KUKA omniRob

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 32
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Neue Verfahren und Technologien
� Modellierung von realen Systemen, Prozessen- Matlab/Simulink, Realtime Workshop- Modelica- Labview- ASCET SD- SCADE
� Datenmodelle
- Eclipse, Modelling Framework (EMF)- Visual Studio, Modellierungs-SDK

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 33
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Beispiel - Prozessmodell

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 34
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Matlab/Simulink - Signalfluss

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 35
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Modelica – Modellierung phys. Systeme

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 36
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Datenmodell in EMF

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 37
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Zusammenfassung
� Die Programmierung von Eingebetteten Systemen erfordert Wissen über das - umgebende System,- die auszuführenden Prozesse.
� Die modellbasierte Programmierung unterstützt die - formale Darstellung ohne Realisierungsdetails,- weitgehende Plattformunabhängigkeit.
� Die dargestellten Modelle können sofort simuliert und zur Codegenerierung benutzt werden.
� Die Aufteilung der Software auf binäre Komponenten erleichtert Installation und Wartung.
� Das Ergebnis ist kosteneffiziente Software mit guter Wartbarkeit und hoher Qualität
Quintessenz ?

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 38
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Modellbasierte Prog: Robotik mit Matlab

Modellbasierte und komponentenorientierte Softwaree ntwicklung von Eingebetteten Systemen 1. Juli 2014 Folie 39
HS Augsburg Fak. Informatik
CIM & RobotikProf. G. Stark
Vielen Dank für ihre
Aufmerksamkeit!