LS-DYNA Theory Manual Material · PDF fileLS-DYNA Theory Manual Material Models 19.17 Figure...
5
LS-DYNA Theory Manual Material Models 19.15 21 31 11 22 33 12 32 11 22 33 13 23 1 11 22 33 12 23 31 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 0 0 1 0 0 0 0 0 1 0 0 0 0 0 l E E E E E E E E E C G G G υ υ υ υ υ υ − − − − − − − = (19.2.4) where the subscripts denote the material axes, i.e., and i j i i j xx ii x E E υ υ ′ ′ ′ = = (19.2.5) Since l C is symmetric 12 21 11 22 , etc. E E υ υ = (19.2.6) The vector of Green-St. Venant strain components is 11 22 33 12 23 31 , , , , , , t E E E E E E E = (19.2.7) After computing ij S , we use Equation (18.32) to obtain the Cauchy stress. This model will predict realistic behavior for finite displacement and rotations as long as the strains are small. Material Model 3: Elastic Plastic with Kinematic Hardening Isotropic, kinematic, or a combination of isotropic and kinematic hardening may be obtained by varying a parameter, called β between 0 and 1. For β equal to 0 and 1, respectively, kinematic and isotropic hardening are obtained as shown in Figure 19.3.1. Krieg and Key [1976] formulated this model and the implementation is based on their paper. In isotropic hardening, the center of the yield surface is fixed but the radius is a function of the plastic strain. In kinematic hardening, the radius of the yield surface is fixed but the center translates in the direction of the plastic strain. Thus the yield condition is 2 1 0 2 3 y ij ij σ φ ξξ = − = (19.3.1)
-
Upload
hoangkhanh -
Category
Documents
-
view
214 -
download
0
Transcript of LS-DYNA Theory Manual Material · PDF fileLS-DYNA Theory Manual Material Models 19.17 Figure...

LS-DYNA Theory Manual Material Models
19.15
21 31
11 22 33
12 32
11 22 33
13 23
1 11 22 33
12
23
31
10 0 0
10 0 0
10 0 0
10 0 0 0 0
10 0 0 0 0
10 0 0 0 0
l
E E E
E E E
E E EC
G
G
G
υ υ
υ υ
υ υ−
− −
− −
− −= (19.2.4)
where the subscripts denote the material axes, i.e.,
andi j ii j x x ii xE Eυ υ ′ ′ ′= = (19.2.5)
Since lC is symmetric
12 21
11 22
, etc.E E
υ υ= (19.2.6)
The vector of Green-St. Venant strain components is
11 22 33 12 23 31, , , , , ,tE E E E E E E= (19.2.7)
After computing ijS , we use Equation (18.32) to obtain the Cauchy stress. This model will
predict realistic behavior for finite displacement and rotations as long as the strains are small.
Material Model 3: Elastic Plastic with Kinematic Hardening Isotropic, kinematic, or a combination of isotropic and kinematic hardening may be
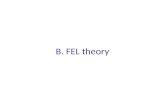
obtained by varying a parameter, called β between 0 and 1. For β equal to 0 and 1, respectively, kinematic and isotropic hardening are obtained as shown in Figure 19.3.1. Krieg and Key [1976] formulated this model and the implementation is based on their paper. In isotropic hardening, the center of the yield surface is fixed but the radius is a function of the plastic strain. In kinematic hardening, the radius of the yield surface is fixed but the center translates in the direction of the plastic strain. Thus the yield condition is
21
02 3
yij ij
σφ ξ ξ= − = (19.3.1)

Material Models LS-DYNA Theory Manual
19.16
where
ij ij ijsξ α= − (19.3.2)
0p
y p effEσ σ β ε= + (19.3.3)
The co-rotational rate of ijα is
( ) 21
3p
ij p ijEα β ε∇ = − (19.3.4)
Hence,
( )11 1 12
2 2 21n
n n nn n n nij ij ij ik kj jk ki tα α α α Ω α Ω
+ + + ++ ∇= + + + Δ . (19.3.5)
Strain rate is accounted for using the Cowper-Symonds [Jones 1983] model which scales the yield stress by a strain rate dependent factor
( )1
01p
py p effE
C
εσ σ β ε= + + (19.3.6)
where p and C are user defined input constants and ε is the strain rate defined as:
ij ijε ε ε= (19.3.7)
The current radius of the yield surface, yσ , is the sum of the initial yield strength, 0σ , plus the
growth ,pp effEβ ε where pE is the plastic hardening modulus
tp
t
E EE
E E=
− (19.3.8)
and peffε is the effective plastic strain
12
0
2
3
tp p p
eff ij ij dtε ε ε= (19.3.9)

LS-DYNA Theory Manual Material Models
19.17
Figure 19.3.1. Elastic-plastic behavior with isotropic and kinematic hardening where l0 and l are the undeformed and deformed length of uniaxial tension specimen, respectively.
The plastic strain rate is the difference between the total and elastic (right superscript e)strain rates:
p eij ij ijε ε ε= − (19.3.10)
In the implementation of this material model, the deviatoric stresses are updated elastically, as described for model 1, but repeated here for the sake of clarity:
* nij ij ijkl klCσ σ ε= + Δ (19.3.11)
where
*ijσ is the trial stress tensor, nijσ is the stress tensor from the previous time step,
ijklC is the elastic tangent modulus matrix,
klεΔ is the incremental strain tensor.

Material Models LS-DYNA Theory Manual
19.18
and, if the yield function is satisfied, nothing else is done. If, however, the yield function is violated, an increment in plastic strain is computed, the stresses are scaled back to the yield surface, and the yield surface center is updated. Let *
ijs represent the trial elastic deviatoric stress state at n+1
* * *13ij ij kks σ σ= − (19.3.12)
and* *ij ij ijsξ α= − . (19.3.13)
Define the yield function,
2 2 2 0 elastic or neutral loading3
0 plastic harding2 ij ij y y
for
forφ ξ ξ σ Λ σ∗ ∗ ≤
= − = −>
(19.3.14)
For plastic hardening then
1
3
n n nyp p p peff eff eff eff
pG E
Λ σε ε ε ε
+ −= + = + Δ
+(19.3.15)
scale back the stress deviators
1 3 peffn
ij ij ij
G εσ σ ξ
Λ+ ∗ ∗Δ
= − (19.3.16)
and update the center:
( )1 1 pp effn n
ij ij ij
Eβ εα α ξ
Λ+ ∗− Δ
= + (19.3.17)
Plane Stress Plasticity The plane stress plasticity options apply to beams, shells, and thick shells. Since the stresses and strain increments are transformed to the lamina coordinate system for the constitutive evaluation, the stress and strain tensors are in the local coordinate system. The application of the Jaumann rate to update the stress tensor allows for the possibility that the normal stress, 33σ , will not be zero. The first step in updating the stress tensor is to
compute a trial plane stress update assuming that the incremental strains are elastic. In the above, the normal strain increment 33εΔ is replaced by the elastic strain increment
( )33 11 2233 2
σ λ ε εε
λ μ+ Δ + Δ
Δ = −+
(19.3.18)

LS-DYNA Theory Manual Material Models
19.19
where λ and μ are Lamé’s constants. When the trial stress is within the yield surface, the strain increment is elastic and the stress update is completed. Otherwise, for the plastic plane stress case, secant iteration is used to solve Equation (19.3.16)for the normal strain increment ( 33εΔ ) required to produce a zero
normal stress:
33*33 33
3ip
effi G ε ξσ σ
ΛΔ
= − (19.3.19)
Here, the superscript i indicates the iteration number. The secant iteration formula for 33εΔ (the superscript p is dropped for clarity) is
11 1 133 33
33 33 33133 33
i ii i i
i i
ε εε ε σσ σ
−+ − −
−
Δ − ΔΔ = Δ −−
(19.3.20)
where the two starting values are obtained from the initial elastic estimate and by assuming a purely plastic increment, i.e.,
( )133 11 22ε ε εΔ = − Δ − Δ (19.3.21)
These starting values should bound the actual values of the normal strain increment. The iteration procedure uses the updated normal stain increment to update first the deviatoric stress and then the other quantities needed to compute the next estimate of the normal stress in Equation (19.3.19). The iterations proceed until the normal stress 33
iσ is sufficiently
small. The convergence criterion requires convergence of the normal strains:
133 33 4
133
10i i
i
ε εε
−−
+
Δ − Δ<
Δ (19.3.22)
After convergence, the stress update is completed using the relationships given in Equations (19.3.16) and (19.3.17)
Material Model 4: Thermo-Elastic-Plastic This model was adapted from the NIKE2D [Hallquist 1979] code. A more complete
description of its formulation is given in the NIKE2D user’s manual. Letting T represent the temperature, we compute the elastic co-rotational stress rate as
( )Tij ijkl kl kl ijC dTσ ε ε θ∇ = − + (19.4.1)
where