KINEMATIKA ÉS DINAMIKA - glink.huglink.hu/hallgatoi_segedletek/files/35d1535125d2d21b237d... · 1...
4
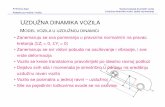
1 / 4 BME, M szaki Mechanikai Tanszék KINEMATIKA ÉS DINAMIKA Merev test kinematikája (térbeli mozgás) Segédlet a 2. HF-hoz 1. Példa Jelölje ϖ 21 a 2-es test 1-hez viszonyított szögsebességét, és így ( mivel az OD tengely a (2)-es test pillanatnyi forgástengelye, 2 párhuzamos vele): 1.) a.) ϖ 2 = ϖ 1 + ϖ 21 | ϖ 21 | = | ϖ 1 | = 6 s rad A vázolt helyzetben: ϖ 1 = - s rad 6 0 0 , ϖ 21 = ϖ 2 = - ≈ - = - + - s rad 9 0 196 , 5 9 0 3 3 1 0 3 3 6 0 0 , vagy: | ϖ 2 | = ϖ 2 = 2 ϖ 1 2 3 = 6 3 s rad ≈ 10,39 s rad ϖ 2 = ϖ 2 - ≈ - s rad 9 0 196 , 5 3 0 1 2 1 , vagy: v B = v D + ϖ 2 x r DB = 0 + ϖ 2 x r DB , ahol: ϖ 2 = z y x 2 2 2 ϖ ϖ ϖ , r DB = 3 0 1 2 1 R v B = ϖ 2 x r DB = - - = y x z y z y x R R R 2 2 2 2 2 2 2 3 3 2 1 2 3 0 2 1 k j i ϖ ϖ ϖ ϖ ϖ ϖ ϖ Mivel a (2)-es test tengelyének mozgását az (1) jel kar biztosítja, így a tengely B pontjának sebességét az (1)-es test szögsebességével is számíthatjuk: H B B v B r HB x y i j D A r BA 60 o 60 o 2R 2 B H r HB z x i k 1 r DB r CD C (2) ϖ 1 A x z (1) (0) ϖ 2 ϖ 21 C O D B 30 o ϖ 1 ϖ 2 30 o 60 o ϖ 21 ϖ 21x ϖ 21y 21 sin 60 3 6 0 0 2 cos 60 1 o o rad s ϖ = - -
Transcript of KINEMATIKA ÉS DINAMIKA - glink.huglink.hu/hallgatoi_segedletek/files/35d1535125d2d21b237d... · 1...

1 / 4
BME, Mőszaki
Mechanikai Tanszék
KINEMATIKA ÉS DINAMIKA
Merev test kinematikája (térbeli mozgás)
Segédlet
a 2. HF-hoz
1. Példa
Jelölje ωωωω21 a 2-es test 1-hez viszonyított szögsebességét, és így ( mivel az OD tengely a (2)-es test pillanatnyi forgástengelye, ω 2 párhuzamos vele): 1.) a.) ωωωω2 = ωωωω1 + ωωωω21
| ωωωω21| = | ωωωω1| = 6
s
rad
A vázolt helyzetben:
ωωωω1 =
−s
rad
6
0
0
, ωωωω21 =
ωωωω2 =
−≈
−=
−+
−s
rad
9
0
196,5
9
0
33
1
0
3
3
6
0
0
,
vagy:
| ωωωω2| = ω2 = 2 ω12
3 = 6 3
s
rad ≈ 10,39
s
rad
ωωωω2 = ω2
−≈
−s
rad
9
0
196,5
3
0
1
2
1,
vagy:
vB = vD + ωωωω2 x r DB = 0 + ωωωω2 x rDB , ahol: ωωωω2 =
z
y
x
2
2
2
ωωω
, rDB =
3
0
1
2
1R
vB = ωωωω2 x rDB =
−−=
y
xz
y
zyx R
RR 2
22
2
222 3
3
2
1
2
30
2
1
kji
ωωω
ωωωω
Mivel a (2)-es test tengelyének mozgását az (1) jel
ő kar
biztosítja, így a tengely B pontjának sebességét az (1)-es test szögsebességével is számíthatjuk:
H B
ρB
vB
r HB
x
y
i
j
D
A
rBA
60o
60o
2R
ω 2
B H rHB
z
xi
k ω 1
r DB
rCD
C
(2)
ωωωω1
A
x
z
(1) (0)
ωωωω2 ωωωω21
C
O
D
B
30o
ωωωω1 ωωωω2
30o 60o ωωωω21
ωωωω21x
ωωωω21y
21
sin 60 36
0 02
cos60 1
o
o
rad
sω
= − −

2 / 4
BME, Mőszaki
Mechanikai Tanszék
KINEMATIKA ÉS DINAMIKA
Merev test kinematikája (térbeli mozgás)
Segédlet
a 2. HF-hoz
vB = vC + ωωωω1 x r CB = 0 + ωωωω1 x rCB, ahol: rCB =
3
0
3
2
1R ,
egyszer
őbben:
vB = vH + ω 1 x rHB = 0 + ω 1 x r HB , ahol: rHB =
0
0
1
2
3R
vB =
−=
−=
−s
mRr HB
0
5,4
0
0
1
0
2
3
0
1
0
11 ωω
Vagyis a kétféle számítási mód összevetésébı l:
−=
−−
s
mR
y
xz
y
0
5,4
0
3
3
2
1
2
22
2
ωωω
ω
így: x: 02 =yω
y:
−=−s
mR xz 5,4)3(
2
122 ωω , innen:
−=−s
radxz 183 22 ωω
z: ( 02 =yω ), geometriából: z
x
2
2
ωω
− = tg 30o = 3
1, tehát
−=s
radz 92ω , így
≈
=−=s
rad
s
radzx 196,533
3
322 ωω
azaz: ω 2 =
−≈
−s
rad
s
rad
9
0
196,5
9
0
33
1.) b.) |ωωωω2| = állandó, de ωωωω2 iránya változik, ugyanis a 2-es test
mozgása során annak szögsebességvektora ωωωω1 szögsebességgel elfordul (forog) a függı leges tengely körül, így:
ωωωω1 ωωωω2
ωωωω21
x
z ωωωω2x
ωωωω2z
p │p
│= 1

3 / 4
BME, Mőszaki
Mechanikai Tanszék
KINEMATIKA ÉS DINAMIKA
Merev test kinematikája (térbeli mozgás)
Segédlet
a 2. HF-hoz
εεεε2 = ωωωω1 x ωωωω2 = ωωωω1 x ωωωω2x = ω1ω2x
−≈
−=
−2
0
177,31
0
0
1
0
318
0
1
0
s
rad,
ugyanis ha ωωωω2 = ω2p , akkor
εεεε2 = dt
d ωωωω2 = dt
d ω2 p +
ω2
dt
dp = 0 +
ω2(ωωωω1 x p) = ωωωω1 x ω2p = ωωωω1 x ωωωω2
2.) A 2-es test D pontba redukált kinematikai vektorkettı se a vázolt helyzetben:
[ ω 2 ; vD]D = [ω 2 ; 0]D , vagyis , tehát a 2-es test mozgása elemi forgó mozgás.
3.) a.) vA = vD + ω 2 x rDA = 0 + ω 2 x rDA = ω 2 x (2 rDB) = 2 ω 2 x rDB = 2 vB =
−s
m
0
9
0
vagy: vA = vE + ω 2 x rEA = 0 + ω 2 x rEA
vA =
−=
−=
−s
mRr EA
0
9
0
0
1
0
23
2
0
1
0
22 ωω ,
A 2-es test A pontba redukált kinematikai vektorkettı se a vázolt helyzetben:
[ ω 2 ; vA]A =
−
−s
m
s
rad
0
9
0
;
9
0
33
, vagyis ,
tehát a 2-es test mozgása elemi forgó mozgás.
3.) b.) aA = aB + ε 2 x r BA + ω 2 x (ω 2 x rBA) = aB + ε 2 x rBA + ω 2 x vB
aB = aH + ε 1 x rHB + ω 1 x (ω 1 x rHB) = - ω
12rHB =
−
2
0
0
27
s
m
ahol: aH = 0 , ε 1 = 0 , mivel ω 1 = állandó,
E
D
A
rEA
r DA
60o
60o x
z
2R
ω 2
ω 2 vD = 0
ω 2 vA = 0

4 / 4
BME, Mőszaki
Mechanikai Tanszék
KINEMATIKA ÉS DINAMIKA
Merev test kinematikája (térbeli mozgás)
Segédlet
a 2. HF-hoz
vagy: A „B” pont ρB = | rHB| = R
23
sugarú köríven (körpályán) mozog állandó nagyságú
vB sebességgel, így: aB = aBt + aBn = aBn = aBnn = -aBn i
aBn =
=
==22
21
2
273643
s
m
s
mvB
B
B ωρρ
ε 2 x rBA =
−≈
−=
−=−
2222
794,7
0
5,13
3
0
3
29
1
0
3
21
2
30
2
100
kji
s
m
s
mR
RR
εε
ω 2 x vB =
−
−≈
−−
2
383,23
0
5,40
05,40
9033
kji
s
m
aA ≈
−
−≈
−
−+
−+
−
2
589,15
0
81
383,23
0
5,40
94,7
0
5,13
0
0
27
s
m
Számítsuk ki, hogy mekkora a pillanatnyi nyugalomban levı D pont gyorsulása! aD = aB + ε 2 x r BD + ω 2 x (ω 2 x rBD) = aB + ε 2 x (-rBA) + ω 2 x (-vB) =
= aB - ε 2 x r BA - ω 2 x vB ≈
≈
−
−−
−−
−
2
589,15
0
27
383,23
0
5,40
94,7
0
5,13
0
0
27
s
m