ÜDVÖZLI ÖNÖKET A Budapesti Műszaki és Gazdaságtudományi Egyetem Általános és...
22
ÜDVÖZLI ÖNÖKET A Budapesti Műszaki és Gazdaságtudományi Egyetem Általános és Felsőgeodézia Tanszéke
-
Upload
marvin-goodman -
Category
Documents
-
view
223 -
download
0
Transcript of ÜDVÖZLI ÖNÖKET A Budapesti Műszaki és Gazdaságtudományi Egyetem Általános és...

ÜDVÖZLI ÖNÖKET
A Budapesti Műszaki és Gazdaságtudományi EgyetemÁltalános és Felsőgeodézia Tanszéke

BUDAPEST



yY
X Y
Z r
R
e.ρ
R= r - e.ρ

PRECISION AND ACCURACY
• PRECISION OF GPS•ACCURACY OF GPS

ρ = c .τΔρ = c . Δτ
Δρ = 3.108 m/s . 10 -12 s
Δρ = 0.3 mm
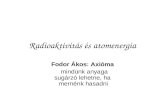
PRECISION OF THE GPS SYSTEM

6om
Tipical satellite path without S/A
0 11:54
U
U= User equivalent range error

SPS USER EQUIVALENT ERROR [m]
ACCURACY OF THE GPS SYSTEM
SA AS C/A RT MAX
YESNOYESNO
YESYESNONO
100(150)40(60)
100(150)24(36)
300(450)120(180)300(450)
40(60)

1oom
Tipical satellite path with S/A
0 11:54
U= User equivalent range error
U

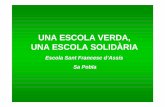
1min 10min 1hour 12hours 1day
100
300
Pos. error
Obs. time
1m
3m
Postioning accuracy vs Observation time

3min
0
PRC
RRC
RTCMRTCMSC 104SC 104Ver 2.0Ver 2.0

S T A N D A R D P O S I T I O N I N G S E R V I C EG L O B A L R A N G E ( 1 0 - 1 0 0 ) k m
O b s e r v a t i o nt e c h n i q u e
A b s o l u t er e a l t i m e
A b s o l u t e1 h o u r
A b s o l u t e1 d a y
R e l a t i v er e a l t i m e
R e l a t i v e> 1 m i n
R e l a t i v e> 1 h o u r P P
R e l a t i v e 1 d a y
C a r r ie r p h a s e H 1 0 0 m 9 5 %V 1 5 0 m 9 5 %
3 0 1 5 m4 5 1 5 m
1 m 1 . 5 m
< 0 . 3 m < 0 . 1 m < 0 . 0 3 m < 0 . 0 0 0 3 mL 1 + L 2
C a r r ie r s m o o t h e dC / A c o d e
H 1 0 0 m 9 5 %V 1 5 0 m 9 5 %
3 0 1 5 m4 5 1 5 m
1 m 1 . 5 m
< 1 m < 0 . 5 m < 0 . 3 m < 0 . 3 m
C / A c o d e H 1 0 0 m 9 5 %V 1 5 0 m 9 5 %
3 0 1 5 m4 5 1 5 m
3 m 5 m
< 5 m < 3 m < 3 m < 3 m
R e a lt im e = 1 - 1 0 H z

DGPS Corrections I.C/A code
PRCi = ρ’i -| r - R |i RRCi = PRCi - PRCi-1
ρi = | r - R |i + PRCi
ρi = ρi-1 + RRCi-1
RTCM v2.0
True range
PRC : Pseudorange correctionRRC: Range rate correction
r : satellite positionR : reference position
ρ’ : pseudorangeρ : corrected range
BASE
REC

DGPS Corrections II.Carrier phase
CFCi = Φ’i - FRAC( ρi /(N*λ))N = INT (ρi / λ)
DFCi = CFCi - CFCi-1
Φi = Φ’i + CFCi
Φi = Φi -1 + RFCi -1
RTCM v2.1
True phase
CFC : Carrier Phase CorrectionRPC: Rate of Phase Correction
N : resolved ambiguityΦ’ : raw phase
ρ : corrected rangeΦ : correct phase
BASE
REC

DIFFERENTIAL CORRECTIONSDIFFERENTIAL CORRECTIONS forfor
REALTIME PRECISE NAVIGATIONREALTIME PRECISE NAVIGATION
Geostationary satellite Terrestrial radioGeostationary satellite Terrestrial radio
•Wide area coverage Contry to continentalWide area coverage Contry to continental•Availabilty in high seas Availabilty in high seas Availabilty in urbanareas Availabilty in urbanareas•Accuracy 5 - 10 m Accuracy submeterAccuracy 5 - 10 m Accuracy submeter•Latency Latency 6 sec Latency 6 sec Latency 0.1 sec 0.1 sec•Low elevation Topographic warmholesLow elevation Topographic warmholes•Expensive antenna Inexpensive antennaExpensive antenna Inexpensive antenna•Sophisticated receiver Simple pager receiverSophisticated receiver Simple pager receiver

COSTCOST
ACCURACY ACCURACY 1σ1σ
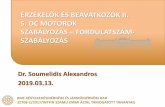
100m 10m 1m 10cm 1cm 1mm 0.3mm
POSITONING COST vs ACCURACYPOSITONING COST vs ACCURACY

DemandDemand
ACCURACY ACCURACY 1σ1σ
100m 10m 1m 10cm 1cm 1mm 0.3mm
POSITONING COST vs ACCURACYPOSITONING COST vs ACCURACY
DGPSDGPS RTKRTK POSTPROCESSINGPOSTPROCESSING

75
50
0 19 57 76
Deviation (%)
Frequency (KHz)

1999 CEI Workshop,Trieste Prof. Dr. GRACZKA Gyula
FM BROADCASTING SITES

NAVSAT
VEHICLE
CONSIGNMENT
SENSOR
TELECOM
MAP
DISPATCHERACC. PANIC
NET
INTELLIGENT TRANSPORT SECURITY SYSTEM