Kinematics of Rigid Bodies :: Rotating Axes Notes/ME101-Lecture33-KD.pdf · Kinematics of Rigid...
15
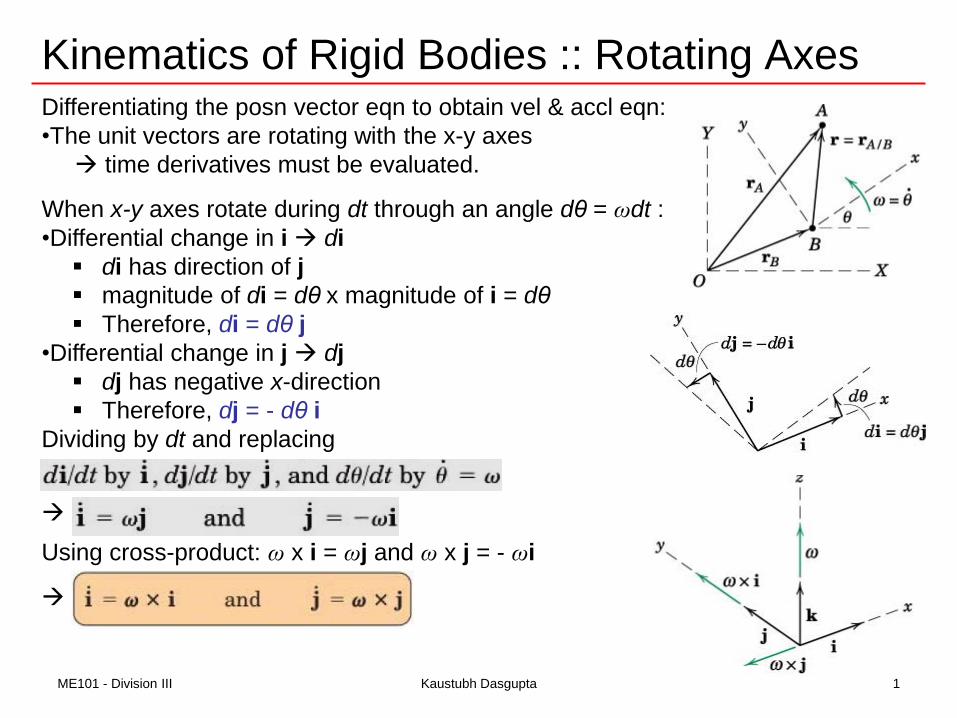
Kinematics of Rigid Bodies :: Rotating Axes Differentiating the posn vector eqn to obtain vel & accl eqn: •The unit vectors are rotating with the x-y axes time derivatives must be evaluated. When x-y axes rotate during dt through an angle dθ = ωdt : •Differential change in i di di has direction of j magnitude of di = dθ x magnitude of i = dθ Therefore, di = dθ j •Differential change in j dj dj has negative x-direction Therefore, dj = - dθ i Dividing by dt and replacing Using cross-product: ω x i = ωj and ω x j = - ωi 1 ME101 - Division III Kaustubh Dasgupta
Transcript of Kinematics of Rigid Bodies :: Rotating Axes Notes/ME101-Lecture33-KD.pdf · Kinematics of Rigid...
Kinematics of Rigid Bodies :: Rotating AxesDifferentiating the posn vector eqn to obtain vel & accl eqn:
•The unit vectors are rotating with the x-y axes
time derivatives must be evaluated.
When x-y axes rotate during dt through an angle dθ = ωdt :
•Differential change in i di
di has direction of j
magnitude of di = dθ x magnitude of i = dθ
Therefore, di = dθ j
•Differential change in j dj
dj has negative x-direction
Therefore, dj = - dθ i
Dividing by dt and replacing
Using cross-product: ω x i = ωj and ω x j = - ωi
1ME101 - Division III Kaustubh Dasgupta
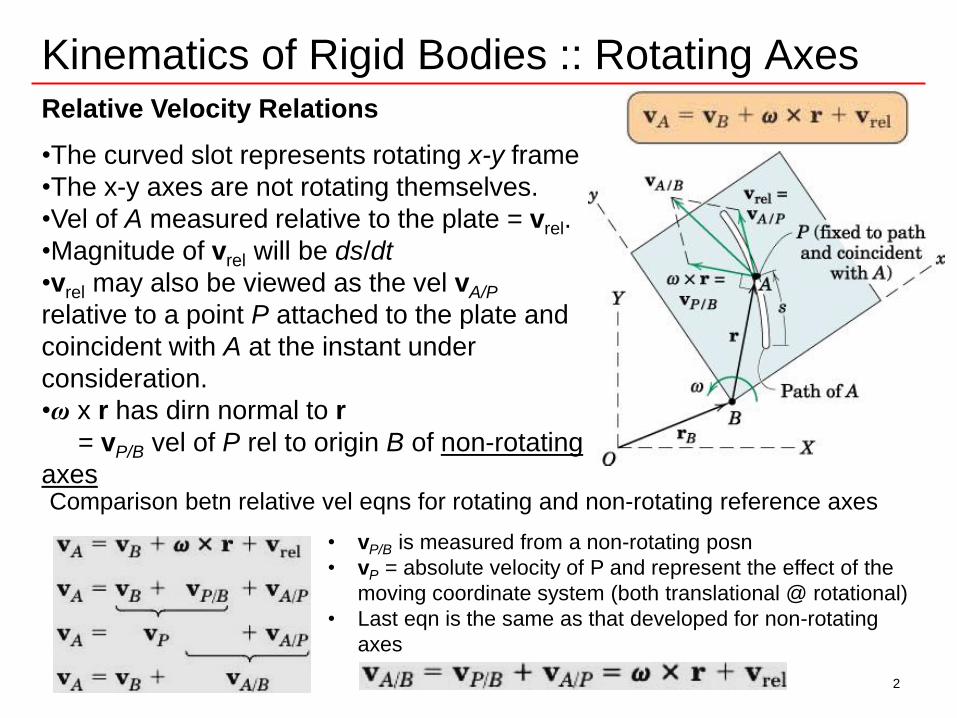
Kinematics of Rigid Bodies :: Rotating AxesRelative Velocity Relations
•The curved slot represents rotating x-y frame
•The x-y axes are not rotating themselves.
•Vel of A measured relative to the plate = vrel.
•Magnitude of vrel will be ds/dt
•vrel may also be viewed as the vel vA/P
relative to a point P attached to the plate and
coincident with A at the instant under
consideration.
•ω x r has dirn normal to r
= vP/B vel of P rel to origin B of non-rotating
axesComparison betn relative vel eqns for rotating and non-rotating reference axes
• vP/B is measured from a non-rotating posn
• vP = absolute velocity of P and represent the effect of the
moving coordinate system (both translational @ rotational)
• Last eqn is the same as that developed for non-rotating
axes
2
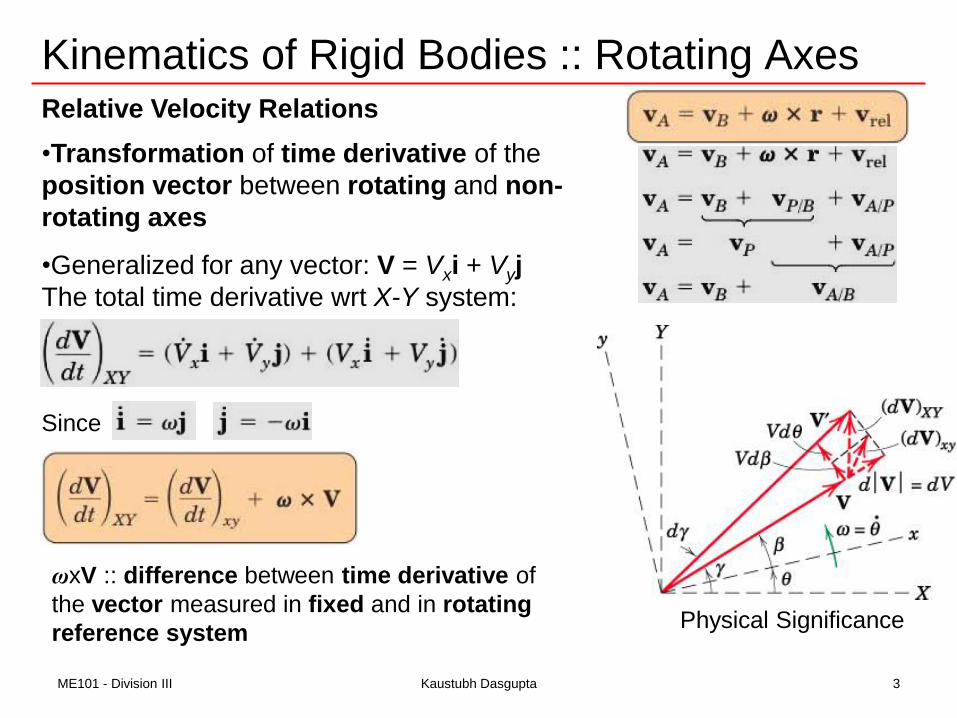
Kinematics of Rigid Bodies :: Rotating AxesRelative Velocity Relations
•Transformation of time derivative of the
position vector between rotating and non-
rotating axes
•Generalized for any vector: V = Vxi + Vyj
The total time derivative wrt X-Y system:
Since
ωxV :: difference between time derivative of
the vector measured in fixed and in rotating
reference systemPhysical Significance
3ME101 - Division III Kaustubh Dasgupta
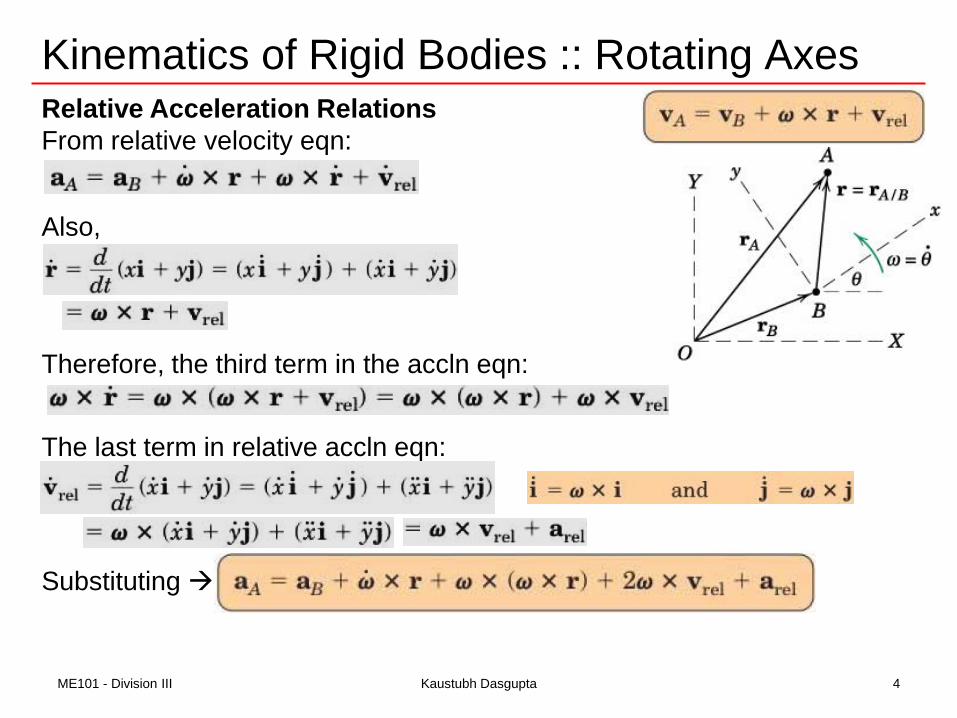
Kinematics of Rigid Bodies :: Rotating AxesRelative Acceleration Relations
From relative velocity eqn:
Also,
Therefore, the third term in the accln eqn:
The last term in relative accln eqn:
Substituting
4ME101 - Division III Kaustubh Dasgupta
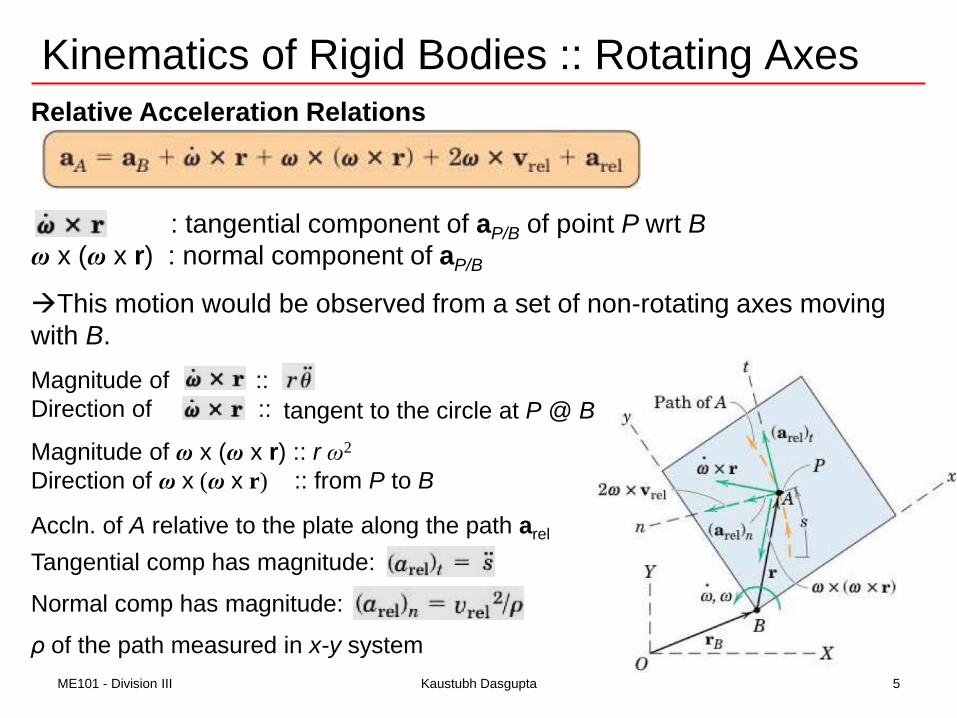
Kinematics of Rigid Bodies :: Rotating Axes
Relative Acceleration Relations
: tangential component of aP/B of point P wrt B
ω x (ω x r) : normal component of aP/B
This motion would be observed from a set of non-rotating axes moving
with B.
Magnitude of ::
Direction of ::
Magnitude of ω x (ω x r) :: r ω2
Direction of ω x (ω x r) :: from P to B
Accln. of A relative to the plate along the path arel
Tangential comp has magnitude:
Normal comp has magnitude:
ρ of the path measured in x-y system
5ME101 - Division III Kaustubh Dasgupta
tangent to the circle at P @ B
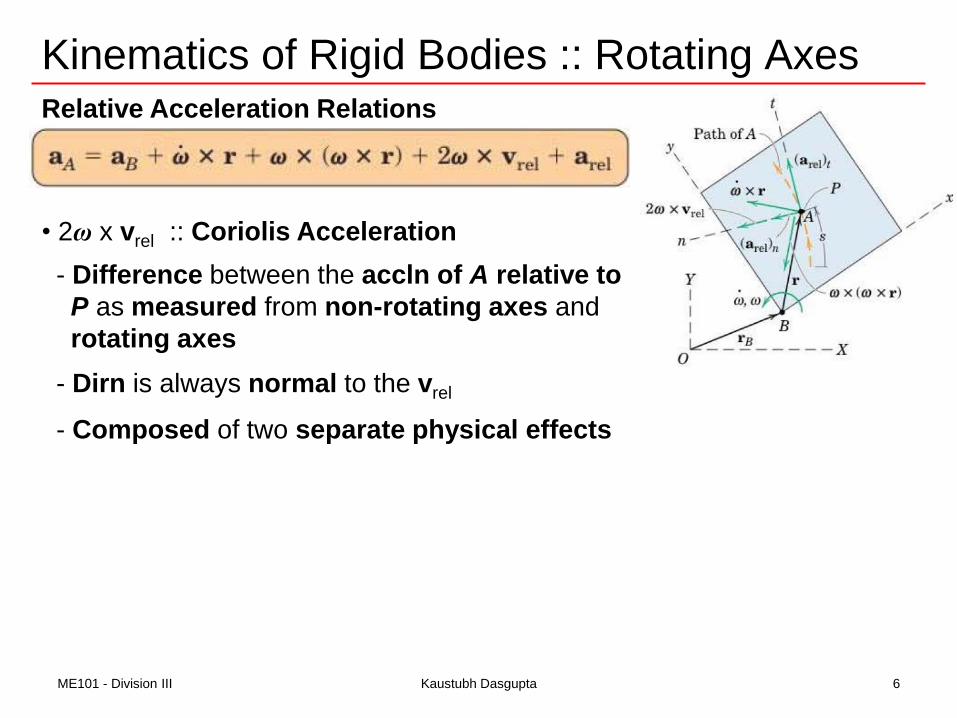
Kinematics of Rigid Bodies :: Rotating AxesRelative Acceleration Relations
• 2ω x vrel :: Coriolis Acceleration
- Difference between the accln of A relative to
P as measured from non-rotating axes and
rotating axes
- Dirn is always normal to the vrel
- Composed of two separate physical effects
6ME101 - Division III Kaustubh Dasgupta
Kinematics of Rigid Bodies :: Rotating Axes
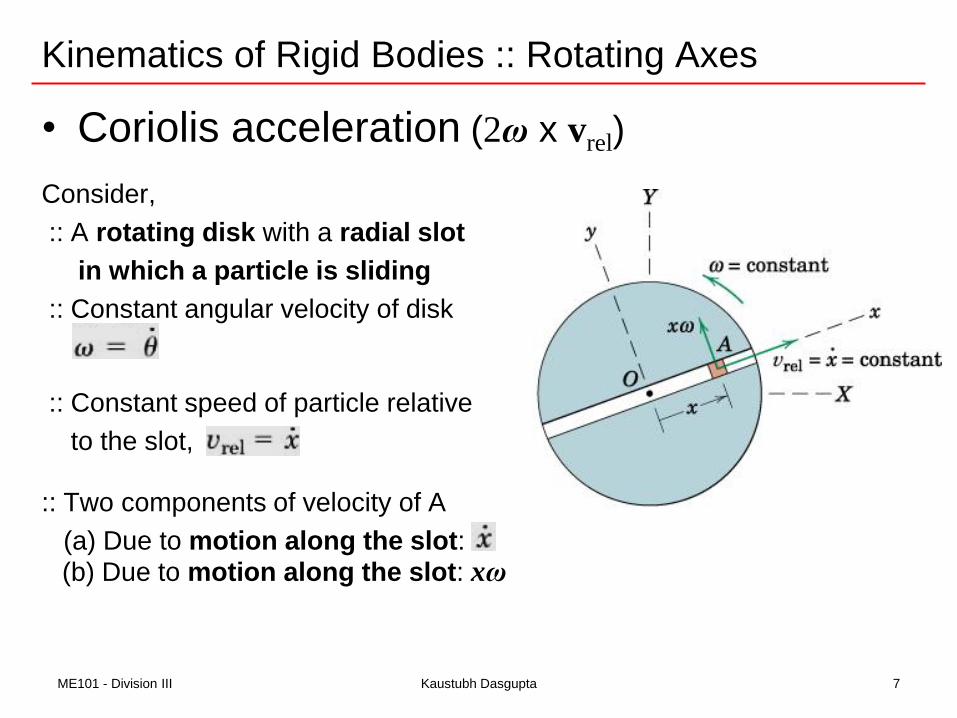
• Coriolis acceleration (2ω x vrel)
Consider,
:: A rotating disk with a radial slot
in which a particle is sliding
:: Constant angular velocity of disk
:: Constant speed of particle relative
to the slot,
:: Two components of velocity of A
(a) Due to motion along the slot:
(b) Due to motion along the slot: xω
7ME101 - Division III Kaustubh Dasgupta
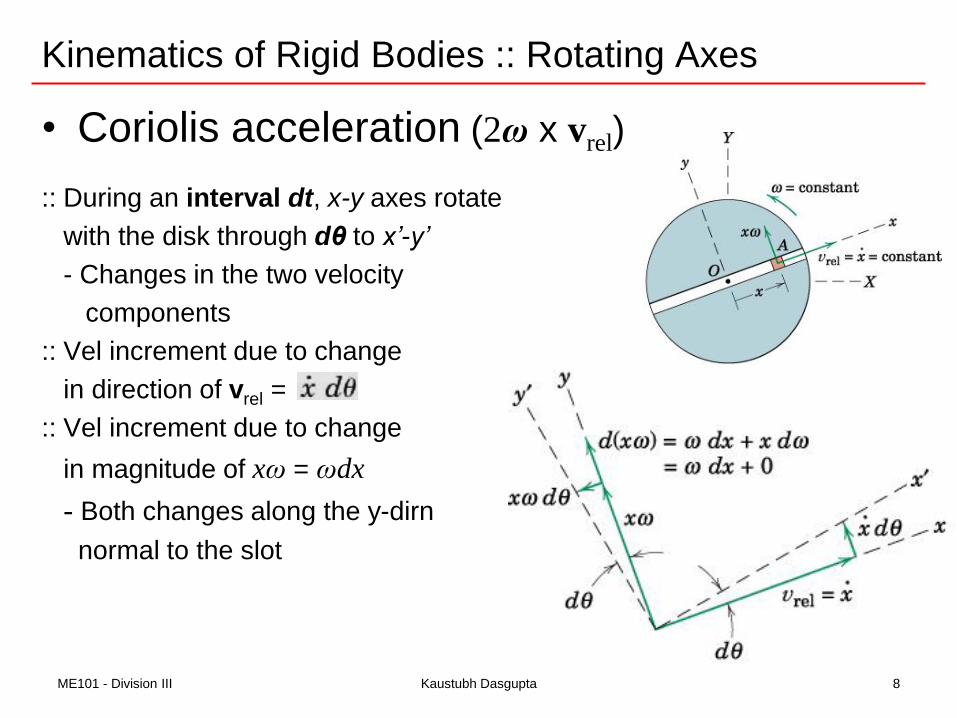
Kinematics of Rigid Bodies :: Rotating Axes
• Coriolis acceleration (2ω x vrel)
:: During an interval dt, x-y axes rotate
with the disk through dθ to x’-y’
- Changes in the two velocity
components
:: Vel increment due to change
in direction of vrel =
:: Vel increment due to change
in magnitude of xω = ωdx
- Both changes along the y-dirn
normal to the slot
8ME101 - Division III Kaustubh Dasgupta
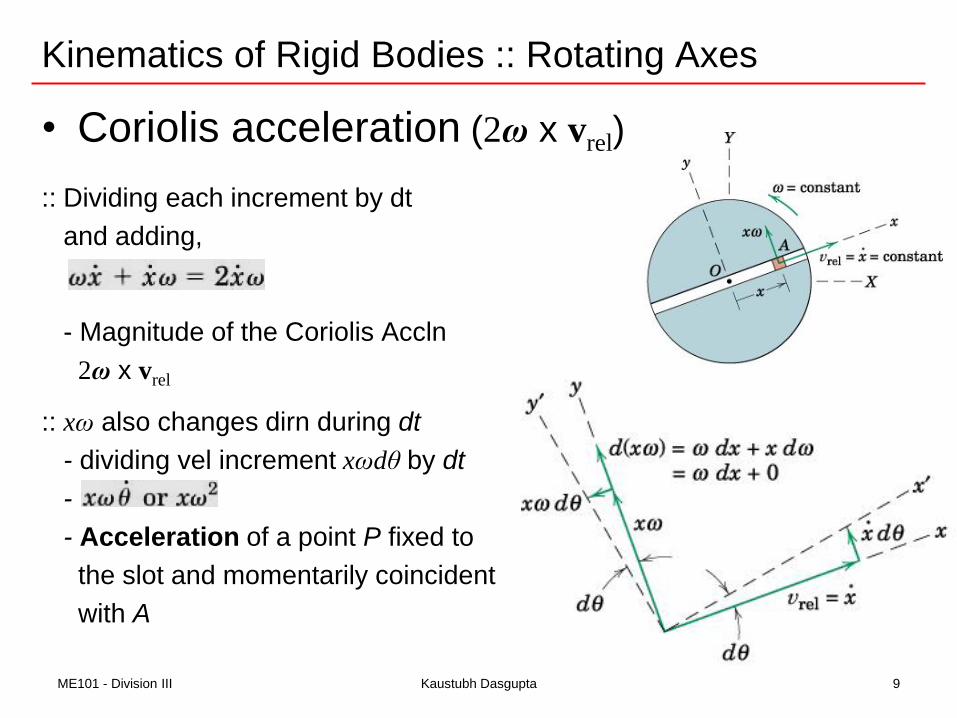
Kinematics of Rigid Bodies :: Rotating Axes
• Coriolis acceleration (2ω x vrel)
:: Dividing each increment by dt
and adding,
- Magnitude of the Coriolis Accln
2ω x vrel
:: xω also changes dirn during dt
- dividing vel increment xωdθ by dt
-
- Acceleration of a point P fixed to
the slot and momentarily coincident
with A
9ME101 - Division III Kaustubh Dasgupta
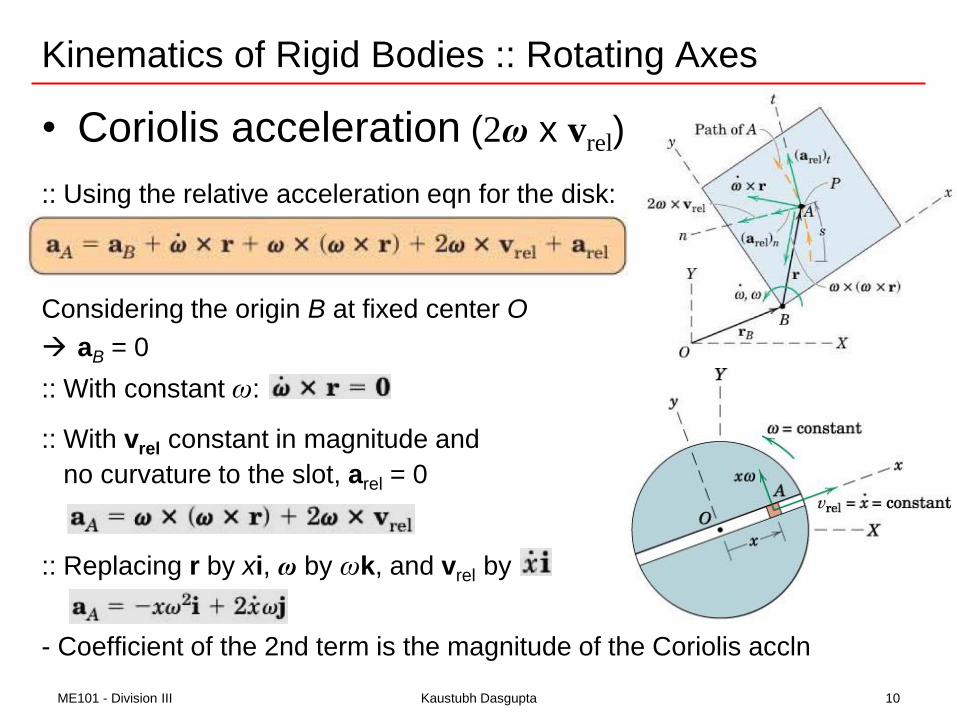
Kinematics of Rigid Bodies :: Rotating Axes
• Coriolis acceleration (2ω x vrel)
:: Using the relative acceleration eqn for the disk:
Considering the origin B at fixed center O
aB = 0
:: With constant ω:
:: With vrel constant in magnitude and
no curvature to the slot, arel = 0
:: Replacing r by xi, ω by ωk, and vrel by
- Coefficient of the 2nd term is the magnitude of the Coriolis accln
10ME101 - Division III Kaustubh Dasgupta
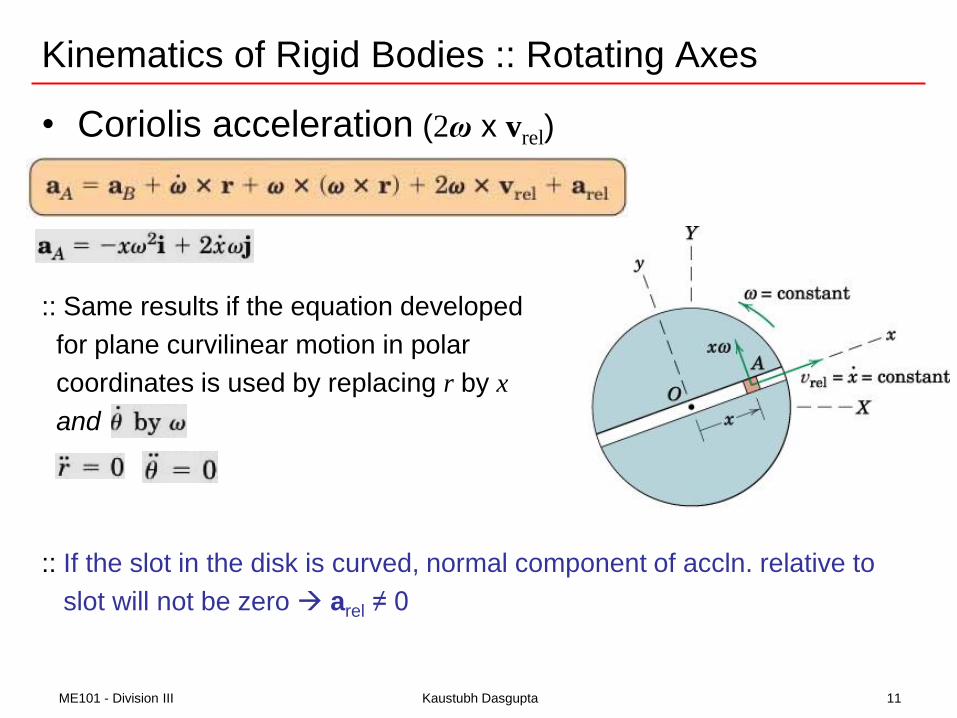
Kinematics of Rigid Bodies :: Rotating Axes
• Coriolis acceleration (2ω x vrel)
:: Same results if the equation developed
for plane curvilinear motion in polar
coordinates is used by replacing r by x
and
:: If the slot in the disk is curved, normal component of accln. relative to
slot will not be zero arel ≠ 0
11ME101 - Division III Kaustubh Dasgupta
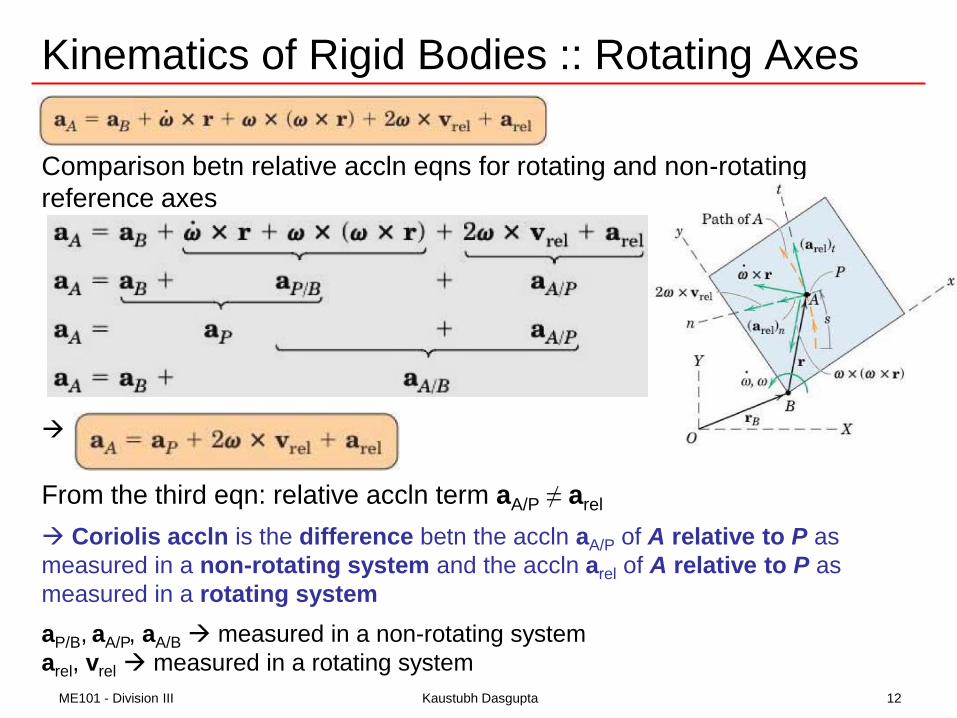
Comparison betn relative accln eqns for rotating and non-rotating
reference axes
From the third eqn: relative accln term aA/P ≠ arel
Coriolis accln is the difference betn the accln aA/P of A relative to P as
measured in a non-rotating system and the accln arel of A relative to P as
measured in a rotating system
aP/B, aA/P, aA/B measured in a non-rotating system
arel, vrel measured in a rotating system
Kinematics of Rigid Bodies :: Rotating Axes
12ME101 - Division III Kaustubh Dasgupta
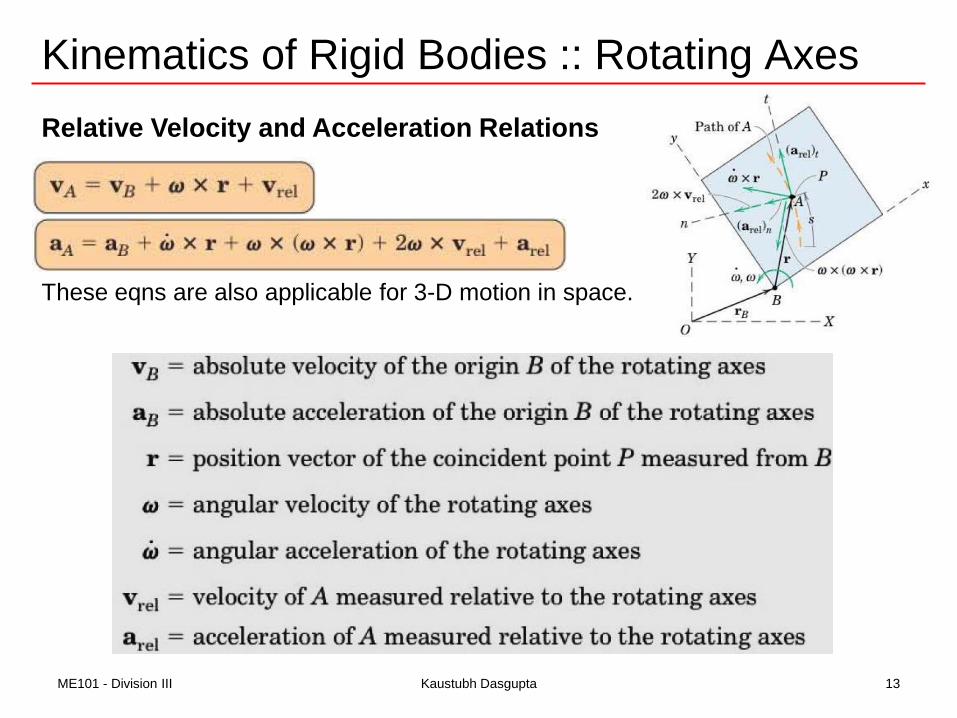
Relative Velocity and Acceleration Relations
These eqns are also applicable for 3-D motion in space.
Kinematics of Rigid Bodies :: Rotating Axes
13ME101 - Division III Kaustubh Dasgupta
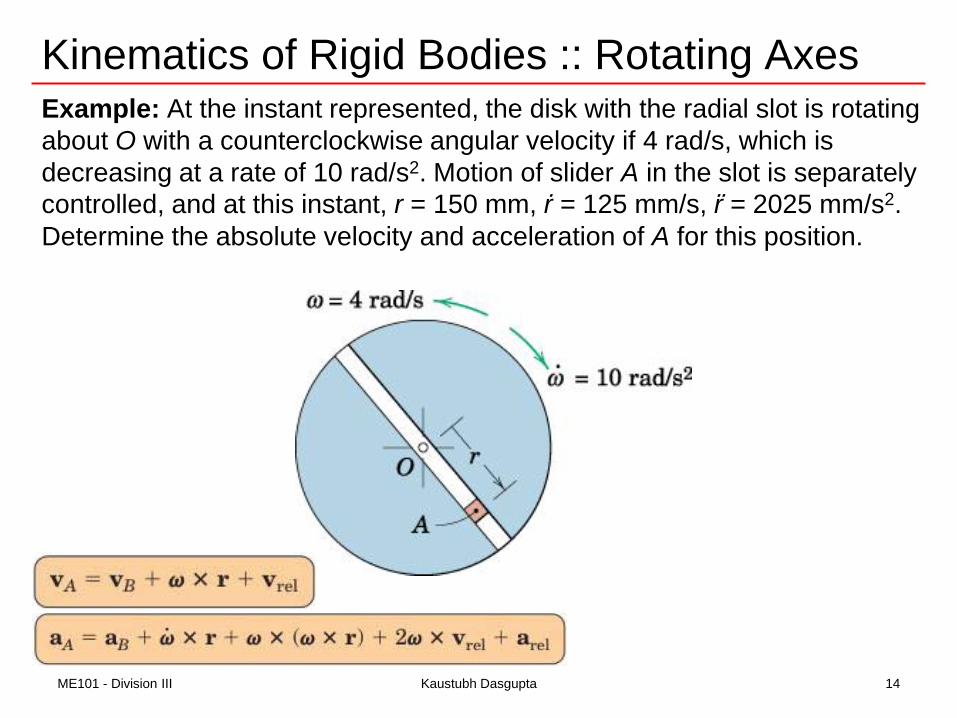
Example: At the instant represented, the disk with the radial slot is rotating
about O with a counterclockwise angular velocity if 4 rad/s, which is
decreasing at a rate of 10 rad/s2. Motion of slider A in the slot is separately
controlled, and at this instant, r = 150 mm, r ̇ = 125 mm/s, r ̈ = 2025 mm/s2.
Determine the absolute velocity and acceleration of A for this position.
Kinematics of Rigid Bodies :: Rotating Axes
14ME101 - Division III Kaustubh Dasgupta
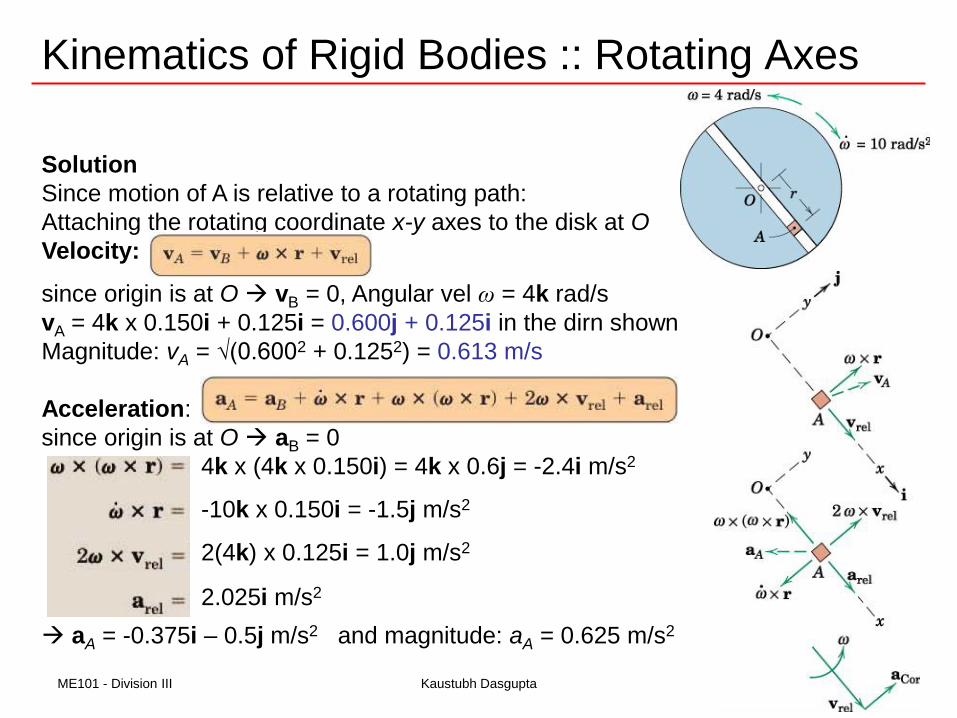
Solution
Since motion of A is relative to a rotating path:
Attaching the rotating coordinate x-y axes to the disk at O
Velocity:
since origin is at O vB = 0, Angular vel ω = 4k rad/s
vA = 4k x 0.150i + 0.125i = 0.600j + 0.125i in the dirn shown
Magnitude: vA = √(0.6002 + 0.1252) = 0.613 m/s
Acceleration:
since origin is at O aB = 0
4k x (4k x 0.150i) = 4k x 0.6j = -2.4i m/s2
-10k x 0.150i = -1.5j m/s2
2(4k) x 0.125i = 1.0j m/s2
2.025i m/s2
aA = -0.375i – 0.5j m/s2 and magnitude: aA = 0.625 m/s2
Kinematics of Rigid Bodies :: Rotating Axes
ME101 - Division III Kaustubh Dasgupta