Dynamical instabilities in rapidly rotating neutron …...UNIVERSITA DEGLI STUDI DI PARMA`...
85
UNIVERSIT ` A DEGLI STUDI DI PARMA DIPARTIMENTO DI FISICA Dynamical instabilities in rapidly rotating neutron star models Gian Mario Manca Thesis submitted for the award of the degree of Ph.D. in Physics Dottorato di Ricerca in Fisica Supervisor: Roberto Depietri XIX CICLO –GENNAIO 2007
Transcript of Dynamical instabilities in rapidly rotating neutron …...UNIVERSITA DEGLI STUDI DI PARMA`...

UNIVERSITA DEGLI STUDI DI PARMA
DIPARTIMENTO DI FISICA
Dynamical instabilities in rapidly rotatingneutron star models
Gian Mario Manca
Thesis submitted for the award of the degree ofPh.D. in Physics
Dottorato di Ricerca in Fisica
Supervisor: Roberto Depietri
XIX CICLO – GENNAIO 2007

This document was typeset by the author using the LATEX2ε software.The file in Portable Document Format was generated with pdfTEX version 14h.
c© Copyright 2007 by Gian Mario Manca. All Rights Reserved.
AUTHOR’S ADDRESS
Gian Mario MancaDipartimento di FisicaUniversita degli Studi di ParmaParco Area delle Scienze 7/A, I-43100 Parma, ItalyE-MAIL: [email protected]

Abstract
We present accurate simulations of the dynamical barmode instability in fullGeneral Relativity focussing on two aspects which have not been investigatedin detail in the past. Namely, on the persistence of the bar deformation oncethe instability has reached its saturation and on the precise determination of thethreshold for the onset of the instability in terms of the parameter β = T/|W |.We find that generic nonlinear mode-coupling effects appear during the devel-opment of the instability and these can severely limit the persistence of the bardeformation and eventually suppress the instability. In addition, we observethe dynamics of the instability to be strongly influenced by the value β and onits separation from the critical value βc marking the onset of the instability. Wediscuss the impact these results have on the detection of gravitational wavesfrom this process and provide evidence that the classical perturbative analy-sis of the barmode instability for Newtonian and incompressible Maclaurinspheroids remains qualitatively valid and accurate also in full General Relativ-ity.


Contents
1 Introduction 1
2 Evolution of Fields and Matter 52.1 Evolution of Einstein equations . . . . . . . . . . . . . . . . . . . . . . . . 52.2 Evolution of the hydrodynamics equations . . . . . . . . . . . . . . . . . . 7
3 Initial Data and Methodology 113.1 Initial Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.2 Methodology of the Analysis . . . . . . . . . . . . . . . . . . . . . . . . . 14
4 Evolution of the instability 174.1 General features of the dynamics . . . . . . . . . . . . . . . . . . . . . . . 17
4.1.1 The tests on stable models . . . . . . . . . . . . . . . . . . . . . . 174.1.2 Common feature of unstable models . . . . . . . . . . . . . . . . . 17
4.2 Detailed features of the dynamics . . . . . . . . . . . . . . . . . . . . . . . 204.2.1 Dependence on β . . . . . . . . . . . . . . . . . . . . . . . . . . . 204.2.2 The role of symmetries . . . . . . . . . . . . . . . . . . . . . . . . 214.2.3 The role of the initial perturbation . . . . . . . . . . . . . . . . . . 234.2.4 The role of the EOS . . . . . . . . . . . . . . . . . . . . . . . . . 244.2.5 The role of grid spacing and size . . . . . . . . . . . . . . . . . . . 24
4.3 Comparison with previous studies . . . . . . . . . . . . . . . . . . . . . . 25
5 Determination of the threshold 375.1 First method: dynamical evaluation . . . . . . . . . . . . . . . . . . . . . 375.2 Second method: critical fit . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6 Gravitational-Wave emission and detection of the unstable models 43
7 Extension to higher compactness 497.1 Initial data and numerical evolution method . . . . . . . . . . . . . . . . . 497.2 Methodology of the analysis . . . . . . . . . . . . . . . . . . . . . . . . . 527.3 Effects of the compactness . . . . . . . . . . . . . . . . . . . . . . . . . . 54
7.3.1 Threshold of the m=2 instability . . . . . . . . . . . . . . . . . . 547.3.2 Persistence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 577.3.3 Unstable deformation with m > 2 . . . . . . . . . . . . . . . . . . 57
iii

CONTENTS iv
8 Conclusions 65

List of Figures
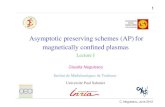
2.1 Position on the (M/R, β) plane of the stellar models considered. Indicatedrespectively with stars and filled circles are the stable and unstable modelsbelonging to a sequence of constant rest mass M0 ' 1.51 M. Opencircles refer instead to models which do not belong to the sequence, arealso unstable and were first investigated in ref. [1]. Finally, the inset showsa magnification of the region where the threshold of the instability has beenlocated for the sequence of models investigated. . . . . . . . . . . . . . . . 8
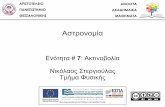
2.2 Initial profiles of the rest-mass density ρ (left panel) and of the angularvelocity Ω (right panel) for models S8, S7, S2, U1, U3, U11 and U13.Indicated with a dot-dashed line is the profile for the first unstable model(U1) with β = 0.255. Note that this is not the first model having an off-centered maximum of the rest-mass density. . . . . . . . . . . . . . . . . . 9
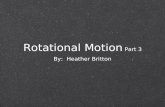
3.1 Mode-phases (solid line for the m=2 mode, dashed for the m=4 mode anddot-dashed for the m=1-mode) at different values of $ overlapped withisocontours of the rest-mass density for model U11 at 25.7ms. . . . . . . . 16
4.1 Snapshots of the evolution of models U3, U11 and U13 at various times.The different columns refer to the three models and show isodensity con-tours for ρ = 0.9, 0.8, 0.7, 0.6, 0.5−2j × ρmax, where j = 1, . . . , 6 and ρmax
is the maximum value of ρ in each panel. The above model were evolvedon a 193×193×68 grid with grid coordinate resolution of 0.5 M (0.74km)and imposing equatorial symmetry. The time evolution of some quantitiescharacterising these models is reported in Figs. 4.2, 4.3 and 4.4. . . . . . . 27
4.2 Time evolution of the instability for model U3. The top panel shows thebehaviour of the quadrupole distortion parameter η+ [cf. eq. (3.15)], themiddle panel reports the behaviour of the power in the Fourier modes m=1,2, 3 and 4, while the bottom panel displays the phase of the m=2 mode. . . 28
4.3 The same as Fig. 4.2 but for model U11. . . . . . . . . . . . . . . . . . . . 28
4.4 The same as Fig. 4.2 but for model U13. . . . . . . . . . . . . . . . . . . . 29
v

LIST OF FIGURES vi
4.5 Schematic evolution of the collective modes (Eq. 7.10) of the rest-massdensity ρ. In this diagram the instability is distinguished in four represen-tative stages: (a) exponential growth of the m=2 mode and m=3 mode; (b)saturation of the instability, development of spiral arms and progressive at-tenuation of the bar deformation; (c) crossing of m=3 mode and m=4 modeand consequent attenuation of the bar, emergence of the m=1-mode as thedominant one; (d) suppression of the bar deformation and emergence of analmost axisymmetric configuration. . . . . . . . . . . . . . . . . . . . . . . 29
4.6 The role of the π-symmetry on the dynamics for model U3. Shown fromthe top are the deformation parameter η, the power in the m=2 mode and inthe m=1-mode (dashed line), the evolution of the position of the “centre ofmass” (the horizontal dashed lines mark the edges of the central cell) andthat of the rest mass. The dotted and continuous lines refer to simulationswithout and with π-symmetry, respectively. . . . . . . . . . . . . . . . . . 30
4.7 The same as in Fig. 4.6 but for model U13. . . . . . . . . . . . . . . . . . 31
4.8 Dynamics of the rotational kinetic energy T [cf. eq. (3.8)] and of the inter-nal energy Eint [cf. eq. (3.6)] for models U3, U11 and U13, when normal-ized to their initial values. . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.9 Effect of an initial m=2 mode perturbation on the dynamics of the defor-mation parameter η(t) (top sub-panels) and of the modes P2(t) and P1(t)(bottom sub-panels) for model U3 (left) and U13 (right), respectively. Thecontinuous lines represent the evolution of the perturbed model after a suit-able phase and time shifts. . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.10 Effect of an initial perturbation on the dynamics of the deformation param-eter η (top panels) and of the mode powers P2(t), P1(t) for model U11.The left panel shows the effects of an initial m=2 mode perturbation, whilethe right one those of an m=1-mode perturbation. . . . . . . . . . . . . . . 33
4.11 Effects on the evolution of the deformation parameter η (top panels) and themodes P2(t) and P1(t) (bottom panels) of model U11 caused by: (left) theuse of the adiabatic polytropic EOS; (right) the use of a larger simulationgrid, where the distance of the outer boundary from the center is increasedfrom 48 M to 66 M on the (x, y)-plane and from 32 M to 47 M alongthe z direction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.12 The same as in Fig. 4.6 but for model D2. In addition, the bottom panelshows the evolution of the phase for the m =2-mode. . . . . . . . . . . . . 35
5.1 Dynamics of the instability near the threshold. The two panels summarisetwo long-term evolutions for model S1 (continuous line) and U1 (dashedline) and show the distortion parameter and the power in the m=2 and m=4modes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38

LIST OF FIGURES vii
5.2 Left panel: critical diagram as constructed with the frequencies and growthtimes relative to the unperturbed models of Table 5.2 (triangles) and to theperturbed models of Table 5.1 (squares). The continuous lines representthe two fitted curves for Ω(β) and τ(β), while the dotted lines the corre-sponding extrapolations below the threshold. Right panel: same data as inthe left panel but magnified around the critical threshold and expressed interms of 1/τ 2 to highlight the very good fit. . . . . . . . . . . . . . . . . . 41
6.1 Gravitational-wave signals along the z-axis for the “cross” polarizationas computed in the Newtonian quadrupole approximation for models U3,U11, U13 and D2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
6.2 Comparison between |h(f)|f 1/2 for models U3 and U13 at 10kpc and thesquare-root of the power spectrum of the noise of Virgo (dashed line),LIGO (dotted line), Advanced LIGO (dotted-line) and the planned reso-nant detector Dual (dot-dashed line). Note the significant difference in thepower spectrum of the two signals, with the one relative to model U3 hav-ing a larger and narrower peak at about 600 Hz, produced by the morepersistent bar deformation. . . . . . . . . . . . . . . . . . . . . . . . . . . 47
7.1 Position on the (M/R, β) plane of the considered stellar models. Indicatedrespectively with stars and filled circles are the m = 2-stable and m = 2-unstable models belonging to the four sequences of constant rest mass.Triangles refer instead to models where the m=3 deformation is the fastestgrowing one. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
7.2 Critical diagram as constructed with the frequencies and growth times rel-ative to the unperturbed models of 7.8 (error bars only). The continuouslines represent the two fitted curves for Ω(β) and τ(β), while the dottedlines the corresponding extrapolations below the threshold. We report alsothe unperturbed models of 7.8 not used for the fit (triangles), the perturbedmodels of 7.7 (squares) and the models dominated by the m=3 deforma-tion (open circles). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
7.3 Left panel: Extrapolation of the critical value of the parameter βc for theonset of the m = 2 instability from the least-square fit of β vs. 1/τ 2 forthe four series of models at constant baryonic mass reported in 7.8. Thenumerical results of these four fits are reported in 7.5. Right panel: Linearextrapolation of the critical β to the limit of zero rest mass. . . . . . . . . . 61

LIST OF FIGURES viii
7.4 Left panel: Evolution of the quadrupole modulus (7.8) in some selectedm=2-unstable models of the sequence with M0 = 2.5M reported in 7.8.In this case models Ud15, Ud10, Ud4 are evolved imposing π-symmetry,models Ud1 and Ud2 without imposing π-symmetry. Right panel: Com-parison of the evolutions of the distortion parameters η (??) for the twom=2-unstable models Ub4 and Ud2 evolved imposing π-symmetry. Theyhave a similar distance from the threshold for the development of the m=2instability but have different masses: 1.5M (dotted line) and 2.5M (dot-dashed line). More compact stars have less persistent deformations alsowithout odd and even modes coupling. . . . . . . . . . . . . . . . . . . . . 61
7.5 Left panel: Matter isodensity lines for the simulation Sd4 with β = 0.245and M0 = 2.5M. Starting from the center the continuos lines representrespectively: the 80%, 70%, 60% and 50% of the maximum density. Dottedlines are 1/2n times the maximum density, with n > 1. The snapshot wastaken at t=20.8 ms. Rigth panel: Evolution of the global modes (7.10) forthe same simulation. The vertical line is exactly at t=20.8 ms. . . . . . . . . 63

List of Tables
3.1 Main properties of the stellar models used in the simulations. Starting fromthe left the different columns report: the central rest-mass density ρc, theratio between the polar and the equatorial coordinate radii rp/re, the properequatorial radius Re, the rest mass M0, the gravitational mass M , the com-pactness M/Re, the total angular momentum J , the rotational periods atthe axis Pa and at the equator Pe, the rotational energy T and the bindingenergy W , and their ratio β (instability parameter). . . . . . . . . . . . . . 13
4.1 Main properties of the initial part of the instability for the stellar modelsused in the simulations. Starting from the left the different columns report:the grid spacing ∆x/M, the amplitudes of the initial perturbations in them=1 and m=2 modes δ1,2, the EOS, the symmetry and the grid size used,the time shift ∆t [cf. eq. (4.1)], the times t1 and t2 between which thegrowth-times τ
Band the frequencies f
Bare computed, the maximum value
of the distortion parameter η, and the duration of the bar deformation τD
. . . 26
5.1 The Table reports for some models near the instability threshold: the ratioβ of the rotational kinetic energy to the gravitational binding energy; theinitial m=2-mode perturbation δ2; the bounds t1 and t2 of the consideredtime interval; the maximum distortion η; the growth rate τ
Band the fre-
quency fB
of the barmode during the initial part of the instability. For thesemodels, ∆x/M = 0.5 and π-symmetry is not used. The growth rate τ
B
and the frequency fB
of the barmode are obtained making a least-square fitof η+(t) (eq.3.16) between t1 and t2. The ∗ indicates that η did not reach amaximum before the simulation was stopped. . . . . . . . . . . . . . . . . 39
5.2 Same quantities as in Table 5.1, but referring to the models evolved with agrid size of ∆x/M = 0.625, with π-symmetry and no perturbation. Thegrowth rate τ
Band the frequency f
Bof the barmode are obtained making a
least-square fit of η+(t) (eq.3.16) between t1 and t2. The interval [t1, t2] ishere determined, differently from the previous tables, as the one in whichη(t) is between 5% and the 25% of its first maximum. These models wereused to determine the threshold. . . . . . . . . . . . . . . . . . . . . . . . 40
ix

LIST OF TABLES x
6.1 List of the representative gravitational-wave quantities computed in theNewtonian quadrupole approximation for models U3, U11, U13 and D2.From the left the different columns report: the fractional amounts of the en-ergy and angular momentum carried by the gravitational radiation (∆M/Mand ∆J/J , respectively), the root-sum-square of h+ for a source at 10 kpc,and the SNRs for Virgo, LIGO, Advanced LIGO and Dual. . . . . . . . . . 44
7.1 Main properties of the stellar models of the sequence with M0 = 1M.Starting from the left: the name of the simulation, the compactness M/Re,the instability parameter β, the central rest-mass density ρc, the ratio be-tween the polar and the equatorial coordinate radii rp/re, the proper equa-torial radius Re, the gravitational mass M , the total angular momentum Jdivided by the square of the gravitational mass, the rotational periods at theaxis Pa and at the equator Pe. . . . . . . . . . . . . . . . . . . . . . . . . 51
7.2 Same quantities as in 7.1 for the sequence of models with M0 = 1.51M. . 527.3 Same quantities as in 7.1 for the sequence of models with M0 = 2M. . . . 537.4 Same quantities as in 7.1 for the sequence of models with M0 = 2.5M. . . 547.5 Least-square fit of the value of β at the threshold for the development of
the barmode instability for the four series of models reported in 7.8. Thecritical value for the onset of the instability βc is the value of β for 1/τ 2 = 0(τ is measured in ms). The graphical representation of the fits is shown in7.3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
7.6 Least-square fit of the value of the frequency fB (in Hz) of the barmode(7.7) at the threshold for the onset of the barmode instability as a functionof θ ≡ (β−βc)/βc for the four series of models at constant baryonic mass.The value of the frequency fB at the threshold is the value for θ = 0. . . . . 56
7.7 Frequency fB
of the barmode deformation and the frequency f3 growthtime τ3 of the m = 3 deformation for model below the threshold for theonset of the m=2 barmode instability. Are also reported: the name of thesimulation; the ratio β of the rotational kinetic energy to the gravitationalbinding energy; the grid resolution used; the amount δ2 (if any) of the initialm=2-mode perturbation. All the values reported here refers to models thatare evolved without imposing the π-symmetry condition. . . . . . . . . . . 58
7.8 Growth rate τB
and frequency fB
of the barmode instability. The models areevolved using grid resolution ∆x/M = 0.625 with no perturbation in theinitial state. In all the models except model Ub1 and Ud1 were imposed theπ-symmetry. The values τ
Band f
Bhave been determined by a least-square
fit of 7.7 using the xy component of the quadrupole (Ixy(t)) in the timeinterval where it is between the 5% and the 35% of its maximum value. . . 62

Acknowledgements
The results presented here have benefitted from discussions with several friendsand colleagues. We are particularly grateful to Nils Andersson, Harald Dim-melmeier, Ian Hawke, Kostas Kokkotas, Ewald Muller, Alessandro Nagar,Christian Ott, Motoyuki Saijo, Bernard Schutz, David Shoemaker, Masaru Shi-bata, Nikolaos Stergioulas, Joel Tohline and Burkhard Zink. Support for thisresearch comes also through the SFB-TR7 of the German DFG and throughthe OG51 of the Italian INFN. All the computations were performed on thecluster for numerical relativity “Albert” at the University of Parma.


Chapter 1
Introduction
It is well known that rotating neutron stars are subject to non-axisymmetric instabilitiesfor non-radial axial modes with azimuthal dependence eimφ (with m = 1, 2, . . .) when theinstability parameter β ≡ T/|W | (i.e. the ratio between the rotational kinetic energy T andthe gravitational binding energy W ) exceeds a critical value βc.
An exact and perturbative treatment of these instabilities exists only for incompress-ible self-gravitating fluids in Newtonian gravity (see refs. [2, 3]) and this predicts thata dynamical instability should arise for the “bar-mode” (i.e. the one with m=2) whenβ ≥ βc = 0.2738. On the other hand, the accurate study of the dynamical barmode insta-bility, of its nonlinear evolution and of the determination of the threshold for the instability,demand the use of numerical simulations with the solution in three spatial dimensions (3D)of the fully nonlinear hydrodynamical equations coupled to the Einstein field equations.
Despite these requirements, much of the literature on this process has so far been limitedto a Newtonian or post-Newtonian (PN) description. While this represents an approxima-tion, these studies have provided important information on several aspects of the instabilitythat could not have been investigated with perturbative techniques. In particular, these nu-merical studies have shown that βc depends very weakly on the stiffness of the equation ofstate (EOS) and that, once a bar has developed, the formation of spiral arms is importantfor the redistribution of the angular momentum (see refs. [4, 5, 6, 7, 8, 9, 10, 11, 12]). Morerecently, instead, it was shown that the threshold for the onset of the dynamical instabilitycan be smaller for stars with a high degree of differential rotation and a weak dependenceon the EOS was confirmed in refs. [13, 14, 15, 16, 17]. Finally, these Newtonian analy-ses have also provided the first evidence an m=1-mode dynamical instability may play animportant role for smaller values of the critical parameter. This is also referred to as the“low-β” instability [18, 19] and it will not be considered here.
Only very recently it has become possible to perform simulations of the dynamical barinstability for old neutron stars in full General Relativity [1]. These studies have shown thatwithin a fully general-relativistic framework the critical value for the onset of the instabilityis smaller than the Newtonian one (i.e. βc ' 0.24−0.25) and this behaviour was confirmedby PN calculations [20, 21] which also suggested that βc varies with the compactness M/Rof the star.
The barmode instability may take place in young neutron stars, either as the result of theaccretion-induced collapse of a white dwarf [?] or in the collapse of a massive stellar core.
1

CHAPTER 1. Introduction 2
Indeed, recent simulations investigating axisymmetric stellar-core collapse in full GeneralRelativity [22] have pointed out that for sufficiently differentially rotating progenitors, it is,at least in principle, possible to obtain toroidal protoneutron-star cores with masses between1.2 and 3 M which are unstable against barmode deformations (It should be mentionedthat it still unclear how likely these high rotation-rates and strongly differential-rotationprofiles actually are in nature.). Besides pointing out this alternative interesting scenario,the work in ref. [22] has also suggested that more realistic EOS and neutrino cooling couldenhance the process. This scenario has also been considered in the Post Newtonian approx-imation in ref. [23]. Interestingly, an important common feature in all these investigationsis that the development of the barmode instability was obtained introducing very strong adhoc m=2-mode perturbations.
The recent general-relativistic studies, together with their Newtonian and post-Newtoniancounterparts, have been very helpful in highlighting the main features of the instability.However, several fundamental questions remain unanswered. Most notably: i) What is therole of the initial perturbation? ii) What is the effect of the symmetry conditions often usedin numerical calculations? iii) How are the dynamics influenced by the value of the param-eter β, especially when this is largely overcritical? Finally and most importantly: iv) Howlong does a bar survive, once fully developed?
Clearly, the last question has important implications for the possible observational rele-vance of the gravitational-wave signal emitted through the barmode instability as the signal-to-noise ratio (SNR) can increase considerably in the case of a long-lived bar since the SNRgrows as the square root of the number of the effective cycles of the signal available fordetection. Earlier work on this subject basically suggested that once a bar was formed itwould tend to be persistent on the radiation-reaction timescale. Indications and evidencesin this direction were presented in a Newtonian framework in ref. [6] as well as in a PN onein ref. [21]. In contrast, fully general-relativistic results, either using suitable symmetryboundary conditions (i.e. the so called π-symmetry boundary conditions) [1] or not [22],show a non-persistent bar.
In this work we try to find answers to these important open questions by exploring,in a systematic way, the barmode instability for a large number of initial stellar models.In doing this, we intend to go beyond the standard phenomenological discussion of thenonlinear dynamics of the instability often encountered in the literature.
The main results of our analysis can be summarised as follows: i) The initial perturba-tion (either in the form of an m=1-mode or of an m=2 mode) can play a role in determiningthe duration of the barmode deformation, but not in determining the growth time of the in-stability; ii) For moderately overcritical models (i.e. with β u βc), the use of a π-symmetrycan radically change the dynamics and extend considerably the persistence of the bar; thisceases to be true for largely overcritical models (i.e. with β βc), for which even theartificial symmetries are not sufficient to provide a long-lived bar; iii) The persistence ofthe bar is strongly dependent on the degree of overcriticality and is generically of the or-der of the dynamical timescale; iv) Generic nonlinear mode-coupling effects (especiallybetween the m=1 and the m=2 mode) appear during the development of the instability andthese can severely limit the persistence of the bar deformation and eventually suppress thebar deformation; v) The dynamics of largely overcritical models are fully determined bythe excess of rotational energy and the bar deformation is very rapidly suppressed through

CHAPTER 1. Introduction 3
the conversion of kinetic energy into internal one. In addition, we have also assessed theaccuracy of the classical Newtonian stability analysis of Maclaurin spheroids for incom-pressible self-gravitating fluids [2]. Overall, and despite having applied it to differentiallyrotating and relativistic models, we have found it to be surprisingly accurate in determin-ing both the threshold for the instability and the complex eigenfrequencies for the unstablemodels.
The paper is organized as follows. In Sec. II we give details on the evolution methodsused, while in Sec. III we discuss the initial models and their properties. In Sec. IV weintroduce the methodology used to analyse the numerical results of the simulations, whichare then discussed in Sec. V in terms of the general dynamics of the instability and of thegeneral properties. In Sec. VI, we present the features of the instability that are specific todifferent treatments of the initial conditions, while in Sec. VII we illustrate two differentmethods for the determination of βc. Finally, in Sec. VIII we discuss the impact of ourresults on the emission of gravitational waves from the unstable models and present inSec. IX our conclusions and the prospects of future research.
We have used a space like signature (−, +, +, +), with Greek indices running from0 to 3, Latin indices from 1 to 3 and the standard convention for the summation overrepeated indices. Furthermore, we indicate as (x,y,z) the Cartesian coordinates and wedefine r =
√x2 + y2 + z2, $ =
√x2 + y2, θ = arctan($/z), φ = arctan(y/x) for the
axial and spherical coordinates. Unless explicitly stated, all the quantities are expressed inthe system of adimensional units in which c = G = M = 1.

CHAPTER 1. Introduction 4

Chapter 2
Evolution of Fields and Matter
The code and the evolution method are the same as the ones used in Baiotti et al. [24, 25]and therein described. For convenience we report here the main properties and characteris-tics of the employed simulation method. We have used the general-relativistic hydrodynam-ics code Whisky, in which the hydrodynamics equations are written as finite differenceson a Cartesian grid and solved using high-resolution shock-capturing (HRSC) schemes (afirst description of the code was given in [25]).
2.1 Evolution of Einstein equations
The original ADM formulation casts the Einstein equations into a first-order (in time) quasi-linear [26] system of equations. The dependent variables are the three-metric γij and theextrinsic curvature Kij , with first-order evolution equations given by
∂tγij = −2αKij +∇iβj +∇jβi, (2.1)
∂tKij = −∇i∇jα + α
[Rij + K Kij − 2KimKm
j
−8π
(Sij −
1
2γijS
)− 4πρ
ADMγij
]+βm∇mKij + Kim∇jβ
m + Kmj∇iβm.
(2.2)
Here, α is the lapse function, βi is the shift vector,∇i denotes the covariant derivative withrespect to the three-metric γij , Rij is the Ricci curvature of the three-metric, K ≡ γijKij
is the trace of the extrinsic curvature, Sij is the projection of the stress-energy tensor ontothe space-like hypersurfaces and S ≡ γijSij (for a more detailed discussion, see [27]).In addition to the evolution equations, the Einstein equations also provide four constraintequations to be satisfied on each space-like hypersurface. These are the Hamiltonian con-straint equation
(3)R + K2 −KijKij − 16πρ
ADM= 0 , (2.3)
5

2.1 Evolution of Einstein equations 6
and the momentum constraint equations
∇jKij − γij∇jK − 8πji = 0 . (2.4)
In equations (2.1)–(2.4), ρADM
and ji are the energy density and the momentum density asmeasured by an observer moving orthogonally to the space-like hypersurfaces.
In particular, we use a conformal traceless reformulation of the above system of evolu-tion equations, as first suggested by Nakamura, Oohara and Kojima [28] (NOK formula-tion), in which the evolved variables are the conformal factor (φ), the trace of the extrinsiccurvature (K), the conformal 3-metric (γij), the conformal traceless extrinsic curvature(Aij) and the conformal connection functions (Γi), defined as
φ =1
4log( 3
√γ) , (2.5)
K = γijKij , (2.6)γij = e−4φγij , (2.7)Aij = e−4φ(Kij − γijK) , (2.8)Γi = γij
,j . (2.9)
The code used for evolving these quantities is the one developed within the Cactuscomputational toolkit [29] and is designed to handle arbitrary shift and lapse conditions. Inparticular, we have used hyperbolic K-driver slicing conditions of the form
∂tα = −f(α) α2(K −K0), (2.10)
with f(α) > 0 and K0 ≡ K(t = 0). This is a generalization of many well known slic-ing conditions. For example, setting f = 1 we recover the “harmonic” slicing condition,while, by setting f = q/α, with q an integer, we recover the generalized “1+log” slicingcondition [30]. In particular, all the simulations discussed in this paper are done usingcondition (2.10) with f = 2/α. This choice has been made mostly because of its com-putational efficiency, but we are aware that “gauge pathologies” could develop with the“1+log” slicings [31, 32].
As for the spatial gauge, we use one of the “Gamma-driver” shift conditions proposedin [33], that essentially acts so as to drive the Γi to be constant. In this respect, the “Gamma-driver” shift conditions are similar to the “Gamma-freezing” condition ∂tΓ
k = 0, which, inturn, is closely related to the well-known minimal distortion shift condition [34].
In particular, all the results reported here have been obtained using the hyperbolicGamma-driver condition,
∂2t β
i = F ∂tΓi − η ∂tβ
i, (2.11)
where F and η are, in general, positive functions of space and time. For the hyperbolicGamma-driver conditions it is crucial to add a dissipation term with coefficient η to avoidstrong oscillations in the shift. Experience has shown that by tuning the value of thisdissipation coefficient it is possible to almost freeze the evolution of the system at latetimes. We typically choose F = 3
4α and η = 2 and do not vary them in time.

2.2 Evolution of the hydrodynamics equations 7
2.2 Evolution of the hydrodynamics equationsThe stellar models are here treated in terms of a perfect fluid with stress-energy tensor
T µν = ρhuµuν + pgµν , (2.12)
h = 1 + ε +p
ρ, (2.13)
where h is the specific enthalpy, ε the specific internal energy and ρ the rest-mass density,so that e = ρ(1+ε) is the energy density in the rest-frame of the fluid. The equations of rel-ativistic hydrodynamics are then given by the conservation laws for the energy, momentumand baryon number
∇µTµν = 0 ,
∇µ(ρuµ) = 0 ,(2.14)
once supplemented with an EOS of type p = p(ρ, ε). While the code has been writtento use any EOS, all the simulations presented here have been performed using either anisentropic “polytropic” EOS
p = KρΓ , (2.15)
where K is the polytropic constant and Γ the adiabatic exponent, or a non-isentropic “ideal-fluid” (Γ-law) EOS
p = (Γ− 1)ρ ε . (2.16)
Note that, with the exception of the polytropic EOS (2.15), the entropy is not constant andthus the evolution equation for ε needs to be solved.
An important feature of the Whisky code is the implementation of a conservativeformulation of the hydrodynamics equations in which the set of equations (2.14) is writtenin a hyperbolic, first-order and flux-conservative form of the type
∂tq + ∂if(i)(q) = s(q) , (2.17)
where f (i)(q) and s(q) are the flux-vectors and source terms, respectively (see ref. [35] foran explicit form of the equations). Note that the right-hand side (the source terms) dependsonly on the metric, and its first derivatives, and on the stress-energy tensor. In order towrite system (2.14) in the form of system (2.17), the primitive hydrodynamical variables(i.e. the rest-mass density ρ and the pressure p (measured in the rest-frame of the fluid), thefluid three-velocity vi (measured by a local zero–angular-momentum observer), the specificinternal energy ε and the Lorentz factor W = αu0) are mapped to the so called conservedvariables q ≡ (D, Si, τ) via the relations
D ≡ √γWρ ,
Si ≡ √γρhW 2vi , (2.18)
τ ≡ √γ
(ρhW 2 − p
)−D .
As previously noted, in the case of the polytropic EOS (2.15), one of the evolution equa-tions (namely the one for τ ) does not need to be solved as the internal energy density canbe readily computed by inverting the relation (2.16). Additional details of the formulationwe use for the hydrodynamics equations can be found in [35].

2.2 Evolution of the hydrodynamics equations 8
Figure 2.1: Position on the (M/R, β) plane of the stellar models considered. Indicatedrespectively with stars and filled circles are the stable and unstable models belonging to asequence of constant rest mass M0 ' 1.51 M. Open circles refer instead to models whichdo not belong to the sequence, are also unstable and were first investigated in ref. [1].Finally, the inset shows a magnification of the region where the threshold of the instabilityhas been located for the sequence of models investigated.

2.2 Evolution of the hydrodynamics equations 9
Figure 2.2: Initial profiles of the rest-mass density ρ (left panel) and of the angular velocityΩ (right panel) for models S8, S7, S2, U1, U3, U11 and U13. Indicated with a dot-dashedline is the profile for the first unstable model (U1) with β = 0.255. Note that this is not thefirst model having an off-centered maximum of the rest-mass density.

2.2 Evolution of the hydrodynamics equations 10

Chapter 3
Initial Data and Methodology
3.1 Initial Data
The initial data for our simulations are computed as stationary equilibrium solutions foraxisymmetric and rapidly rotating relativistic stars in polar coordinates [36]. In generat-ing these equilibrium models we assumed that the metric describing an axisymmetric andstationary relativistic star has the form
ds2 = −eµ+νdt2 + eµ−νr2 sin2 θ(dφ− ωdt)2
+e2ξ(dr2 + r2dθ2)(3.1)
where µ, ν, ω and ξ are space-dependent metric functions. Similarly, we assumed thematter to be characterized by a non-uniform angular velocity distribution of the form
Ωc − Ω =r2e
A2
[(Ω− ω)r2 sin2 θe−2ν
1− (Ω− ω)2r2 sin2 θe−2ν
], (3.2)
where re is the coordinate equatorial stellar radius and the coefficient A is a measure ofthe degree of differential rotation, which we set to A = 1 in analogy with other worksin the literature. Once imported onto the Cartesian grid and throughout the evolution, wecompute the angular velocity Ω (and the period P ) on the (x, y) plane as
Ω =uφ
u0=
uy cos φ− ux sin φ
u0√
x2 + y2, P =
2π
Ω(3.3)
and other characteristic quantities of the system, such as the baryonic mass M0, the gravi-tational mass M , the angular momentum J , the rotational kinetic energy T and the gravi-
11

3.1 Initial Data 12
tational binding energy W as
M ≡∫
d3x(−2T 0
0 + T µµ
)α√
γ , (3.4)
M0 ≡∫
d3x D , (3.5)
Eint ≡∫
d3x Dε , (3.6)
J ≡∫
d3x T 0φα√
γ , (3.7)
T ≡ 1
2
∫d3x ΩT 0
φα√
γ , (3.8)
W ≡ T + Eint + M0 −M , (3.9)
where α√
γ is the square root of the four-dimensional metric determinant. We recall thatthe definitions of quantities such as J , T , W and β are meaningful only in the case ofstationary axisymmetric configurations and should therefore be treated with care once therotational symmetry is lost.
All the equilibrium models considered here have been calculated using the relativisticpolytropic EOS (2.15) with K = 100 and Γ = 2 and are members of a sequence havinga constant amount of differential rotation with A = 1 and a constant rest mass of M0 '1.51 M (a part of this sequence has also been considered in refs. [37] and [38] as modelsA8 − A10). These are collected in Fig. 7.1 in a compactness/instability-parameter plot,where we have indicated with stars the stable models (S1–S8) and with filled circles theunstable ones (U1–U11). In addition, in order to compare with previous results, we havealso considered three other models (D2, D3, D7), first investigated in ref. [1], which havelarger masses and compactnesses. These models are unstable and are marked by circlesin Fig. 7.1. Finally, the inset shows a magnification of the region where the threshold(indicated with a dashed line) of the instability has been located for the members of thesequence.
The main properties of all the considered models are reported in Table 3.1, while weshow in Fig. 2.2 the rest-mass density ρ (left panel) and the rotational angular velocity Ω(right panel) profiles of some of the models in the constant–rest-mass sequence. Note thatthe position of the maximum of the rest-mass density coincides with the center of the staronly for models with low β; for those with a larger β, the maximum of the rest-mass densityresides, instead, on a circle on the equatorial plane. Finally, indicated with a dot-dashedline in Fig. 2.2 is the profile for the first unstable model (U1) with β = 0.255. Note thatthis is not the first model having an off-centered maximum of the rest-mass density.
As mentioned in the Introduction, numerical simulations of the dynamical barmode in-stability have traditionally been sped up by introducing sometimes very large initial m=2deformations. The rationale behind this is simple since a seed perturbation has the effectof reducing the time needed for the instability to develop and thus the computational costs.However, as we will discuss in detail in Chapter 4.2.3, the introduction of any perturba-tion (especially when this is not a small one) may lead to spurious effects and erroneousinterpretations. Although in almost all of our simulation we have evolved purely equilib-rium models and simply used the truncation errors to trigger the instability, we have also

3.1 Initial Data 13
Model ρc rp/re Re M0 M M/Re J Pa Pe T W β(10−4) (ms) (ms) (10−2) (10−2)
U13 0.5990 0.20010 24.31 1.505 1.462 0.0601 3.747 1.723 3.910 2.183 7.764 0.2812U12 0.9940 0.24150 23.52 1.508 1.462 0.0622 3.591 1.599 3.654 2.272 8.228 0.2761U11 1.0920 0.25010 23.31 1.507 1.460 0.0627 3.541 1.572 3.597 2.284 8.327 0.2743U10 1.1960 0.25860 23.08 1.508 1.460 0.0633 3.496 1.542 3.536 2.302 8.461 0.2721U9 1.2840 0.26550 22.88 1.508 1.460 0.0638 3.457 1.517 3.486 2.316 8.575 0.2701U8 1.3470 0.27030 22.73 1.508 1.460 0.0642 3.428 1.500 3.450 2.325 8.659 0.2686U7 1.4060 0.27470 22.59 1.509 1.460 0.0647 3.402 1.484 3.417 2.334 8.741 0.2671U6 1.4810 0.28030 22.40 1.508 1.459 0.0651 3.363 1.465 3.377 2.341 8.832 0.2651U5 1.5530 0.28560 22.22 1.508 1.458 0.0656 3.326 1.446 3.339 2.346 8.920 0.2631U4 1.5880 0.28810 22.13 1.508 1.458 0.0659 3.310 1.437 3.321 2.351 8.970 0.2621U3 1.6720 0.29430 21.92 1.506 1.456 0.0664 3.261 1.417 3.279 2.352 9.061 0.2596U2 1.7230 0.29780 21.78 1.508 1.457 0.0669 3.241 1.404 3.251 2.360 9.146 0.2581U1 1.8120 0.30500 21.54 1.499 1.448 0.0672 3.164 1.386 3.214 2.336 9.167 0.2549S1 1.8600 0.30700 21.42 1.512 1.460 0.0682 3.191 1.368 3.180 2.384 9.388 0.2540S2 1.8850 0.30900 21.35 1.510 1.458 0.0683 3.170 1.364 3.170 2.378 9.396 0.2531S3 1.9160 0.31100 21.27 1.512 1.459 0.0686 3.160 1.356 3.153 2.385 9.458 0.2522S4 1.9620 0.31500 21.14 1.504 1.452 0.0687 3.111 1.348 3.137 2.363 9.439 0.2503S5 2.1280 0.32600 20.70 1.510 1.456 0.0703 3.050 1.308 3.057 2.386 9.736 0.2451S6 2.2610 0.33600 20.32 1.505 1.449 0.0713 2.965 1.282 3.002 2.369 9.859 0.2403S7 2.7540 0.37040 19.03 1.506 1.447 0.0760 2.741 1.189 2.812 2.360 10.56 0.2234S8 3.8150 0.44370 16.70 1.506 1.439 0.0862 2.322 1.048 2.531 2.255 11.96 0.1886D2 3.1540 0.27500 18.29 2.771 2.587 0.1414 7.620 0.735 2.051 9.256 35.28 0.2624D3 3.7250 0.30000 17.85 2.640 2.466 0.1382 6.827 0.731 2.026 8.450 33.11 0.2544D7 2.7960 0.30000 19.56 2.188 2.075 0.1061 5.386 0.959 2.442 5.390 21.06 0.2561
Table 3.1: Main properties of the stellar models used in the simulations. Starting from theleft the different columns report: the central rest-mass density ρc, the ratio between thepolar and the equatorial coordinate radii rp/re, the proper equatorial radius Re, the restmass M0, the gravitational mass M , the compactness M/Re, the total angular momentumJ , the rotational periods at the axis Pa and at the equator Pe, the rotational energy T andthe binding energy W , and their ratio β (instability parameter).

3.2 Methodology of the Analysis 14
considered models which are initially perturbed so as to determine the effect of these pertur-bations on the evolution of the instability. In these cases, we have modified the equilibriumrest-mass density ρ0 with a perturbation of the type
δρ2(x, y, z) = δ2
(x2 − y2
r2e
)ρ0 , (3.10)
where δ2 is the magnitude of the m=2 perturbation (which we usually set to be δ2 '0.01−0.3). This perturbation has then the effect of superimposing on the axially symmetricinitial model a barmode deformation that is much larger than the (unavoidable) m=4-modeperturbation introduced by the Cartesian grid discretization. In addition to a barmode de-formation and in order to test the effect of a pre-existing m=1-mode perturbation we alsoused in some cases (cf. Chapter 4.2.3) an m=1-mode density perturbation of the type
δρ1(x, y, z) = δ1 sin
(φ +
2π$
re
)ρ0 , (3.11)
with δ1 = 0.01. Finally, after the addition of a perturbation of the type (7.5) or (3.11), wehave re-solved the Hamiltonian and momentum constraint equations, in order to enforcethat the initial constraint violation is at the truncation-error level.
3.2 Methodology of the AnalysisA number of different quantities are calculated during the evolution to monitor the dynam-ics of the instability. Among them is the quadrupole moment of the matter distribution,which we compute in terms of the conserved density D rather than of the rest-mass densityρ or of the T00 component of the stress energy momentum tensor
Ijk =
∫d3x D xjxk . (3.12)
Of course, the use of D in place of ρ or of T00 is arbitrary and all the three expressionshave the same Newtonian limit. However, we prefer the form (7.6) because D is a quantitywhose conservation is guaranteed by the form chosen for the hydrodynamics equations(2.17). The time variation of (7.6) (or, rahter, suitable combinations of its second timederivatives) will then be used in Chapter 6 to characterize the gravitational-wave emissionfrom the instability.
Once the quadrupole moment distribution is known, the presence of a bar and its sizemay be usefully quantified in terms of the distortion parameters [21]
η+ =Ixx − Iyy
Ixx + Iyy, (3.13)
η× =2 Ixy
Ixx + Iyy, (3.14)
η =√
η2+ + η2
× . (3.15)
In addition, the quantity (3.13) can be conveniently used to quantify both the growth timeτ
Bof the instability and the oscillation frequency f
Bof the unstable bar once the instability

3.2 Methodology of the Analysis 15
is fully developed. In practice, we perform a nonlinear least-square fit of the computeddistortion η+(t) with the trial function
η+(t) = η0 et/τB cos(2π f
Bt + φ0) . (3.16)
Note that all quantities (3.13)–(3.15) are expressed in terms of the coordinate time t anddo not represent therefore invariant measurements at spatial infinity. However, for thesimulations reported here, the lengthscale of variation of the lapse function at any giventime is always larger than twice the stellar radius at that time, ensuring that the events onthe same timeslice are also close in proper time.
Unless stated differently, we generally do not impose any boundary condition enforcingcertain symmetries. As a result, during the evolution the compact star is not constrainedto be centered at the origin of the coordinate system and in order to monitor the relativemotion of the rest-mass density distribution with respect to coordinate system we computethe first momentum of the rest-mass density distribution
X icm =
1
M
∫d3x ρ(xi) xi , (3.17)
where M ≡∫
d3x ρ(xi). These quantities are reminiscent of the Newtonian definition of thecentre of mass of the star but, because they are not gauge-invariant quantities, they are notexpected to be constant during the evolution. However, since in a Newtonian frameworka time-variation of one of the X i
cm would signal a nonzero momentum in that direction,we monitor these quantities as a measure of the overall accuracy of the simulations. Notealso that, since the concept of the centre of mass is well defined in a Newtonian contextonly, equivalent definitions to (3.17) could be made in terms of D or of T00. We haveverified that in our simulations no significant quantitative differences are present amongthe possible alternative definitions.
In addition, as a fundamental tool to describe and understand the nonlinear propertiesof the development and saturation of the instability, we decompose the rest-mass densityinto its Fourier modes so that the “power” of the m-th mode is defined as
Pm ≡∫
d3x ρ eimφ (3.18)
and the “phase” of the m-th mode is defined as
φm ≡ arg(Pm) . (3.19)
The phase φm essentially provides the instantaneous orientation of the m-th mode whenthis has a nonzero power and is expected to have a harmonic time dependence when thecorresponding mode has a fully developed mode-component.
An important clarification to make is that, despite their denomination, the Fouriermodes (7.10) do not represent proper eigenmodes of oscillation of the star. While, in fact,the latter are well defined only within a perturbative regime, the former simply representa tool to quantify, within a fully nonlinear regime, what are the main components of therest-mass distribution. Stated differently, we do not expect that quasi-normal modes of

3.2 Methodology of the Analysis 16
Figure 3.1: Mode-phases (solid line for the m=2 mode, dashed for the m=4 mode anddot-dashed for the m=1-mode) at different values of $ overlapped with isocontours of therest-mass density for model U11 at 25.7ms.
oscillations are present but in the initial and final stages of the instability, for which a per-turbative description is adequate.
Note also that the diagnostic quantities (7.10) are closely related to the “dipole diagnos-tic” D = P1/M and “quadrupole diagnostic” Q = P2/M of ref. [18]. For some selectedmodels we have restricted the integration domain in eqs. (7.10) and (3.19) to the equatorial[i.e. (x, y)] plane and performed an integration in the azimuthal angle φ only. In this waythe corresponding quantities
Pm($) ≡∫
z=0
dφ ρ($ cos(φ), $ sin(φ))eimφ , (3.20)
φm($) ≡ arg(Pm($)) , (3.21)
have an explicit dependence on the cylindrical radial coordinate $ only. The quantities(3.21) have the advantage that they can be used to check the “coherence of the mode” sinceφm($) should be independent of $ when the m-th mode is a global property of the matterdistribution. As an example we show in Fig. 3.1 the phases for the m=1, 2 and m=4 modesfor model U11 when the bar is still fully developed, just before the bar loses its coherence.Note the m=1 mode shows a spiral-like pattern inside the star, while both φ2 and φ4 acquirea radial dependence in the outer parts of the star, where the bar deformation is absent. Asimilar behaviour for the φm($) has been observed in all the performed simulations.

Chapter 4
Evolution of the instability
4.1 General features of the dynamics
4.1.1 The tests on stable modelsBefore investigating the nonlinear dynamics of unstable stellar models, we have carriedout a systematic investigation of the ability of our code to perform long-term stable andaccurate evolutions of stable stellar models. In particular, we have considered the timeevolution of two of the differentially rotating models discussed in ref. [37, 38], namelymodels S7 and S8 and have followed their dynamics for 24 and 35 axial rotation periods,respectively. In both cases the stellar models remain stable and the density and velocityfluctuations in the stellar interior are smaller than 2% during the whole simulation. This is arather remarkable result in fully 3D simulations and it is worth stressing that the simulationsreported in ref. [39] were not able to go beyond 3 orbital periods for similar values of thegrid size and spacing (we recall that in [39] a second-order TVD method with the MClimiter was used in place of the third-order PPM method used here).
In addition, for a more quantitative check of the accuracy of our simulations, we havecomputed the frequency of the f -mode using the normalized power spectrum (Lomb’smethod [40]) of the coordinate time evolution of the central rest-mass density. The calcu-lated values of 791 Hz for model S8 (A9) and of 674 Hz for model S7 (A10) are in verygood agreement, with the values of 809 Hz and 685 Hz reported in ref. [38] and com-puted using a 2D grid in spherical coordinates but in the conformally flat approximation ofGeneral Relativity.
4.1.2 Common feature of unstable modelsIn this section, we discuss some of the general features of the dynamics of unstable models,postponing to the following chapters the discussion of more detailed aspects of the insta-bility. Here we will focus in particular on the dynamics of three representative unstablemodels, namely U3, U11 and U13, which have been selected so that their increasing valuesfor the β parameter cover the whole range of interest. For these simulations, we have used aspatial resolution ∆x = 0.5 M and a grid of 193×193×68 cells and imposed a reflectionsymmetry with respect the (x, y) plane. As a result, between 80 and 90 gridpoints cover
17

4.1.2 Common feature of unstable models 18
the stars along the x and y axes at time t = 0. Note that all the simulations reported heremake use of a uniform grid with the location of the outer boundary being rather close to thestellar surface; this makes the extraction of gravitational waves difficult and accounts for avery small but nonzero loss of mass and angular momentum (because of matter escapingthe computational box).
In Fig. 4.1 we show some representative snapshots of the rest-mass density at four dif-ferent times for three different unstable models (one column for each model). In particular,each row refers to one of the four representative stages in which the dynamics of the bar canbe divided. These are: (a) exponential growth of the m=2 mode and m=3 mode (first row);(b) saturation of the instability, development of spiral arms and progressive attenuation ofthe bar deformation (second row); (c) crossing of m=3 mode and m=4 mode and conse-quent attenuation of the bar, emergence of the m=1-mode as the dominant one (third row);(d) suppression of the bar deformation and emergence of an almost axisymmetric config-uration (fourth row). Note that while these stages are present in all these three models,the coordinate times at which they take place (indicated in the upper part of each panel),as well as the amplitude of the deformation, depend on the parameters defining the initialmodels, most notably β and M0.
Understanding the occurrence of these four stages during the onset, development andsuppression of the bar deformation represents our effort to go beyond the standard phe-nomenological discussion of the nonlinear dynamics of the instability often encounteredin the literature. An important tool in this discussion will be offered by the time evolu-tion of the Fourier mode-decomposition (7.10) discussed in Sec. 7.2. As we will showbelow, relating the evolution of these quantities to the evolution of the mode phases φm andto the changes in the deformation of the star η+, η× will allow us to provide a consistentdescription of the four stages of the instability.
We start our discussion by reporting in Figs. 4.2, 4.3 and 4.4 the history of the instabil-ity for models U3, U11 and U13. Starting from the upper panels, these figures show: thetime evolution of the distortion parameter η+ (a very similar behaviour can be shown for theother distortion parameter η×), the power Pm in the first four m-modes and the evolution ofthe phase of the m=2 mode. Note that at the beginning of the simulation, as a result of theCartesian discretization, the m=4 mode has the largest power. While this can be reducedby increasing the resolution, the m=4 deformation plays no major role in the developmentof instability, which is soon dominated by the lower-order modes.
The initial phase of the instability [stage (a) in the previous classification] is clearlycharacterized by the exponential growth of the m=2 mode and m=3 mode, the latter onehaving a smaller growth rate. A first interesting mode coupling takes place when the ex-ponentially growing m=3 mode reaches the same power amplitude of the m=4 mode, atwhich point the two modes exchange their dynamics, with the m=4 mode growing ex-ponentially and the m=3 mode reaching saturation. At approximately the same time, them=1-mode also starts to grow exponentially but with a growth rate which is smaller thanthat of the other modes. Note that this “mode-amplitude crossing” between the m=3 modeand m=4 modes also signals the time when collective phenomena start to be fully visible(Note that this mode-amplitude crossing is distinct from the “avoided-crossing” observedwhen studying mode eigenfrequencies along sequences of stellar models.). This is shownwith the first vertical dotted line in Figs. 4.2, 4.3 and 4.4, marking the time when the dis-

4.1.2 Common feature of unstable models 19
tortion parameter starts being appreciably different from zero (upper panel) and the m=2phase assumes a harmonic time dependence (lower panel). This stage continues until them=2 mode reaches its maximum power and the bar has reached its largest extension. Dur-ing the following phase [stage (b)] the bar instability has reached a nonlinear saturation,accompanied by the development of spiral arms which are responsible for ejecting a smallamount of matter and for a progressive attenuation of the bar extension (see discussion inSec. 4.2.1). Furthermore, when the exponentially growing m=1 mode reaches the samepower amplitude of the m=3 mode, the latter, whose growth had slowed down for a while,returns to grow exponentially.
The following phase of the instability [stage (c)] sees modes m=1, 3 and 4 reach com-parable powers and this marks the time when the bar deformation has a sudden decrease.As a result of this crossing among the three modes, only the m=1-mode will continue togrow, while m=3 mode and m=4 mode are progressively damped. Finally, stage (d) startswhen the growing m=1-mode reaches power amplitudes comparable with those of the m=4mode and the final mode-amplitude crossing takes place. This marks a distinct loss of thebar deformation and the emergence of an almost axisymmetric rapidly rotating star. Thisis shown with the second vertical dotted line in Figs. 4.3 and 4.4, highlighting when thedistortion parameter is significantly reduced (upper panel) and the m=2 mode phase losesits harmonic time dependence (lower panel). A schematic and qualitative diagram summa-rizing the evolution of the power in the first four m-modes as discussed above is shownin Fig. 4.5 and can be used as an aid for the interpretation of the quantities computed inFigs. 4.2, 4.3 and 4.4.
We note that the lack of a perturbative study of this process beyond the linear regimeleaves the origins of this interaction between modes still unclear. Furthermore, since thegrowth of the m=1-mode is not clearly exponential, especially for slightly overcritical mod-els (cf. Fig. 4.2 for model U3), we have referred to this process as “mode coupling” ratherthan considering it as the evidence of an m=1 instability. Additional perturbative work inthis respect will help clarify this aspect.
The general and common features of the dynamics of the barmode instability as de-duced from the numerical simulations can be summarized as follows:
• the bar deformation is, in general, not a persistent phenomenon but is suppressedrather rapidly and over a timescale which is of the order of the dynamical one (seealso the following Chapter for an additional discussion on this);
• nonlinear mode couplings take place during the evolution and these allow for thegrowth of other modes besides the fastest-growing m=2 mode;
• the growth of other modes has the overall impact of progressively attenuating them=2 mode and, consequently, the bar deformation, after the instability has saturated;
• for slightly supercritical models (e.g. U3), when the power amplitude of the m=1-mode has become comparable with the one in the m=2 mode, the bar deformation issuppressed and the star evolves towards an almost axisymmetric configuration;
• for largely supercritical models (e.g. U13), the dynamics of the instability are so

4.2 Detailed features of the dynamics 20
violent and the stellar model so far from equilibrium that the strong bar deformationis lost even in the absence of mode-coupling effects (see discussion in Sec. 7.3.2).
4.2 Detailed features of the dynamicsIn this Chapter we discuss some detailed aspects of the instability, concentrating our atten-tion on the impact that different values of β, different boundary conditions, different valuesof the initial perturbations, different EOSs and different grid resolutions or boundary lo-cations have on the onset and development of the instability. We note that while many ofthese different prescriptions do not induce qualitative changes, some of them do changethe initial relative amplitude of the different modes [and hence the simulation time neededfor the instability to develop and the orientation of the bar in the (x, y) plane at a giventime during the instability]. In these cases, in order to make meaningful comparisons, weremove these offsets by choosing a suitable shift in time ∆t and in phase ∆φ in such a waythat the distortion parameters of the reference model ηR
+ and of the new one η+ have themaximal overlap and are related as
η(R)+ (t) ' αη+(t + ∆t) + βη×(t + ∆t) , (4.1)
where α = cos(∆φ), β = sin(∆φ).
4.2.1 Dependence on β
The parameter β plays a very important role in determining the properties of the nonlineardynamics of the instability both with regard to the growth rate τ
Band to the duration τ
D
of the saturation stage [stage (b) of Fig. 4.5]. While the relation between β and τB
willbe discussed in more detail in Sec. 7.3.1, we here concentrate on how the dynamics of thebar, once formed, depend on the degree of overcriticality, i.e. on β − βc, where βc marksthe separation between stable and unstable models. To illustrate this we will consider twomodels which are representative of the whole set considered in Table 3.1 and which havevery different values of β and consequently very distinct behaviours: the largely overcriticalmodel U13 and the slightly overcritical model U3.
Model U13 has β = 0.2812 and is the most unstable of the studied models, since equi-librium models with larger β cannot be produced along the constant–rest-mass sequencechosen here. The most apparent feature shown in Fig. 4.4 for this model is its very rapidgrowth rate (almost three times larger than the one for U3 as reported in Tab. 4.1), but alsoits very effective suppression of the bar deformation. Indeed, the evolution is so rapid thatit is very little affected either by initial perturbations or by the imposition of additionalsymmetries (see next sections). In this case, in fact, the crossing between the m=2 modeand m=1-mode is less evident and the bar deformation goes through large variations, asshown by the large oscillations in P2 after t ' 16 ms, during which time the bar seems todisappear and then form again soon after. At about t ' 20 ms the bar deformation startsdisappearing in coincidence with the mode-amplitude crossing. Again as a result of thevery violent dynamics, the saturation stage is rather short and the bar is essentially lostafter about 8 ms.

4.2.2 The role of symmetries 21
Models U3, on the other hand, has β = 0.2596 and shows dynamics which are in manyrespects the opposite of the one discussed for model U13. As shown in Fig. 4.2, the modeevolution is very smooth and, once formed, the bar persists without significant losses inpower. The growth rate is clearly smaller and the stage of saturation is much longer (about30 ms) and the growth of the m=1-mode plays a major role in the damping of the m=2mode. The transition that leads to the disappearance of the bar is smooth and it requiresmany rotation periods. Differently from model U13, in this case, the properties of the bardynamics in the first stage are sensitive to the use of perturbations or to the imposition ofadditional symmetries (see next sections).
Overall, it is reasonable to expect that the persistence of the bar is strictly related tothe degree of overcriticality, with the duration of the saturation τ
Dtending to the radiation-
reaction timescale for a model with β = βc and to zero for a model with β βc, forwhich the excess of kinetic rotational energy may well produce a rapid disruption of thestar (see Fig. 4.8). The numerical values for τ
Dhave been estimated through a nonlinear fit
to the evolution of P2 with 3 separated single exponential functions in the three intervals[2, ta], [ta, tb] and [tb, tc], where ta and tb are two free parameters and tc marks the end ofthe simulation. The estimates for τ
Dreported in Table 4.1 are still too sparse to be able to
delineate its dependence, beyond the evidence that τD∝ |β − βc|−n, where n is a positive
number. Furthermore, the reported values have an error of about 1 ms, as a result of theused fitting procedure.
4.2.2 The role of symmetriesAs mentioned in the Introduction, the issue of the persistence of the bar deformation hasbeen rather controversial over the years.
While previous calculations carried out in Newtonian physics and in the absence ofsymmetries have highlighted that the bar deformation can be rapidly suppressed as a resultof the growth of an m=1-mode deformation [9], subsequent studies have attributed thegrowth of the odd mode to inaccurate numerical methods and supported the idea that thebar should be persistent over a radiation-reaction timescale and that the use of suitablesymmetry conditions that remove the growth of the odd mode provides a more realisticdescription of the bar dynamics [10]. In addition, it has been argued that once an m=2mode perturbation has developed, only couplings with even modes should be expectedand that the growth of any odd mode should therefore be considered a spurious numericalartifact.
We believe the above argument not to be valid, except in a linear regime and in the veryidealized case in which it is possible to inject exclusively an m=2 perturbation. In practice,however, any initial perturbation, either introduced ad hoc or by the truncation error, willexcite both even and odd modes and all of these will couple once a nonlinear regime isreached.
Having said this, it is nevertheless important to verify that the growth of the m=1-modedetected in our simulations is not a numerical artifact (this is further discussed in Sec. VI.E)and that the argument made about the non-persistence of the bar deformation continues tohold also when boundary conditions with symmetries are introduced. For this reason, weevolved the models discussed in the previous Chapters also with the use of the so-called

4.2.2 The role of symmetries 22
π-symmetry, ensuring that f($, φ, z) = f($, φ + π, z) for any variable f(xi). Clearly, thepresence of any odd mode is in this way impossible by construction. We report in Figs. 4.6-4.7 the results of the simulations for models U3 and U13 using this symmetry. The firsttwo panels from the top show the deformation parameter η(t) and the power in the m=2mode (solid line when the π-symmetry is enforced and dotted line otherwise) and in them=1-mode (dashed line).
Fig. 4.6 clearly shows that the bar deformation is essentially persistent in model U3when the symmetry boundary conditions are applied, its power amplitude being just slowlyattenuated, mostly because of the entropy production via the non-isentropic EOS (2.16)and a possible small contribution due to the use of an tenuous atmosphere outside thestar. However, it is important to note that, besides being convergent and stable, the solutionwithout π-symmetry is also accurate, as well as the one without π-symmetry. This is shownby the second panel from the bottom in Fig. 4.6, reporting the evolution of the positionof the “centre of mass” as defined in eq. (3.17) in the absence of π-symmetry. The twohorizontal dashed lines in that panel mark the edges of the central cell and indicate that upto t ' 50 ms the position of the centre of mass does not leave the central cell of the gridand that the exponential growth of the m=1-mode (which becomes significant from t ' 15ms) cannot be related to a spurious numerical effect. After t ' 50 ms the centre of massstarts to move away from the centre of the grid and also in this case the motion is not dueto numerical accuracy but rather to the fact that a small amount of matter (about 2% ofthe initial one) is being lost from the grid as a result of the development of extended spiralarms. This is shown in the lower panel of Fig. 4.6, which reports the evolution of the restmass when normalized to the initial value and which clearly shows that the motion of thecentre of mass is related to the loss of rest mass through the grid and thus consistent withthe conservation of linear momentum. As we will further discuss in Sec. 4.2.5, the massloss and the consequent motion of the centre of mass can be reduced considerably whenmoving the outer boundary to larger positions. As mass leaves the grid, so does angularmomentum, with losses that vary according to the model considered and ranging from∼ 3% for model U3 up to ∼ 20% for the more violent model U13. Note, however, thatmuch smaller angular-momentum losses (i.e. less than 1% for all models) are in generalmeasured before the mass is shed across the computational boundaries; as a result, angularmomentum can be conserved to reasonable accuracy by using mesh refinements and moredistant outer boundaries (both of these improvements have been tried and a discussion onthe changes introduced is presented in Sec. 4.2.5).
Interestingly, the use of a π-symmetry does not produce a significant change in the caseof model U13. This is true for the dynamics of the bar (cf. the solid and dotted lines inFig. 4.7) but also the values τ
Band f
B. We believe this is because the dynamics of this
largely overcritical model are not dominated by the mode coupling, but rather by efficientconversion of rotational kinetic energy into internal energy. As shown in Fig. 4.8, whichreports the time evolution of the internal and rotational kinetic energies when normalizedto their initial values, model U13 experiences a dramatic and rapid increase in the internalenergy at the expense of the kinetic one. This conversion of energy is the largest among thesimulated models and so effective that mode-coupling effects do not have time to develop.This explains why the use of symmetry conditions slightly reduces the attenuation of thebar, but cannot prevent its rapid disappearance.

4.2.3 The role of the initial perturbation 23
As a final remark we note that the use of a π-symmetry produces only small changesin the values of the bar-pattern frequency f
Bor of the growth time τ
Bwhen compared with
the corresponding values computed in the absence of symmetries (cf. Table 4.1). This isessentially because these boundary conditions do not alter the dynamics of the stage ofexponential growth of the bar and can therefore be used to reduce the computational costsand pursue the systematic search for the threshold of the instability discussed in Sec. 5.2.
4.2.3 The role of the initial perturbationAnother common feature of previous works on the barmode instability has been the intro-duction of a sizeable m=2 mode perturbation of the type shown in eq. (7.5) with the goalof triggering the instability [1, 20, 21, 16, 17, 22]. This approach clearly reduces the com-putational costs but it is fully justified only when the triggered mode is the only unstableone. However, if other unstable modes exist, their development may be altered or evensuppressed in the presence of a strong m=2 mode perturbation. This is particularly rele-vant for the analysis carried out in this work, which has pointed out that nonlinear modecouplings may trigger the growth of other modes and significantly modify the dynamics ofthe instability.
We have therefore considered with care how the introduction of an m=2 mode perturba-tion influences the onset and the development of the instability. More specifically, we haveadded an m=2 mode perturbation of the type shown in eq. (7.5) with δ2 = 0.01, solvedagain the constraint equations and observed that the impact this has on the development ofthe instability depends on the degree of overcriticality. In particular, for models near thethreshold, such as U3, the perturbation does not induce changes in the saturation phase norin the persistence of the bar, but it does have the effect of slightly altering the first part ofthe evolution, with an increase in the maximum distortion (which at saturation is ∼ 10%larger) as well as with an increase in the growth rate (the growth time τ
Bis reduced of
∼ 10 %); see the left panel of Fig. 4.9 and Table 4.1 for a quantitative comparison.On the other hand, for models that are largely overcritical, such as U13, and in analogy
with what discussed in the previous Chapter for the use of symmetric boundary conditions,the introduction of a perturbation does not have a significant effect and the dynamics areessentially unaltered (see the right panel of Fig. 4.9). Finally, for models which are overcrit-ical but not close to the threshold, such as U11, the initial perturbation has a much smallerimpact on both the growth rate and on the maximum distortion (cf. Table 4.1), but it doesincrease the duration of the bar. This is due to the fact that the growth of the m=1-modeis closely related to the one in the m=2 mode and its growth can be delayed and reducedif the latter has initially a non-negligible power. Because of this, the time at which the twomodes have comparable power will be different and in particular will be postponed in theperturbed case (see the left panel of Fig. 4.10). Of course, the converse is also true andmodified dynamics for this model are observed also when an m=1-mode perturbation ofthe type shown in eq. (7.5) is introduced with δ1 = 0.05. This is summarised in the rightpanel of Fig. 4.10, which shows that in this case the perturbation reduces the duration ofthe saturation stage.
In summary, while the introduction of a seed perturbation (either in the form of an m=1-mode or an m=2 mode) does not produce significant qualitative changes in the dynamics

4.2.4 The role of the EOS 24
of the instability, it can result into quantitative changes, most notably in the growth rate,in the maximum distortion and in the persistence of the bar. The persistence of the bar, inparticular, is enhanced when an m=2 mode perturbation is present. The relevance of theseresults will need to be evaluated for those astrophysical scenarios in which long-lasting barswere simulated, but which were triggered through the introduction of a perturbation [22,16].
4.2.4 The role of the EOS
Besides nonlinear mode coupling, another process that could in principle limit the persis-tence of the bar is the formation of shocks (either macroscopical or on smaller scales) thatwould convert the excess kinetic energy into internal one. In order to assess the importanceof this process we have compared the evolution of the relevant unstable models when theseare evolved using the non-isentropic EOS (2.16) and when using the (isentropic) polytropicEOS (2.15) with K = 100 and Γ = 2.
The results of this comparison are summarised for model U11 in Fig. 4.11 and indicatethat the non-isentropic changes are indeed very small and that these do not produce anysignificant variations on the development of the instability and on the growth of the m=2mode. Larger differences are seen in the growth of the m=1-mode, but also these are verysmall and do not produce a qualitative change. Quantitative assessment of the changes pro-duced by a different EOS are reported in Table 4.1, but these are, overall, comparable withthe error bar for the determination of τ
Band f
B. Finally, all the considerations made here
for model U11 apply also to models U13 and U3, with model U3 being slightly more sen-sitive to the change in EOS (cf. Table 4.1). These results indicate therefore that the effectsof shock heating are likely to be unimportant at least for the development and evolution ofthe bar in isolated and old neutron stars.
4.2.5 The role of grid spacing and size
We finally report on the influence of the grid spacing and of the grid size on the developmentof the instability. To assess this we have performed several simulations of the intermediatemodel U11 differing either in grid resolution or in the location of the outer boundaries.In particular, we have considered grid resolutions ∆x/M = 0.375, ∆x/M = 0.5 and∆x/M = 0.625 and found the code to be second-order convergent, with the coarsestresolution being just on the limit of the convergence regime (the results with ∆x/M =0.75 are in fact not convergent at the expected rate).
As summarized in Table 4.1 we have found that the computed values of the instabilityparameters τ
Band f
Bdo not vary significantly across the range of resolutions considered,
with differences that are at most of about 3%. The same Table also contains informationon the results obtained when comparing simulations performed with ∆x/M = 0.625but with a larger computational domain, namely going from a computational box, at thisresolution, with extents [157 × 157 × 56] to one with extents [211 × 211 × 80]. Also inthis case the changes in the dynamics are very small (see also the right panel of Fig. 4.11)and essentially amount to a smaller loss of mass and angular momentum as some of the

4.3 Comparison with previous studies 25
the matter in the spiral arms is thrown out of the computational grid (see also discussion inSec. 7.3.2).
4.3 Comparison with previous studiesTo conclude this Chapter describing the dynamics of the instability, we comment on theimportant validation of the accuracy of our simulations that comes from a comparison withresults previously published in the literature. We have focused, in particular, on the fullygeneral-relativistic simulations published in ref. [1] and repeated those relative to the mod-els D2, D3 and D7 discussed there. These stars have instability parameters β rather closethe critical one, but are also more massive, with gravitational masses between 2 and 2.6M, and have larger compactnesses (cf. Table 3.1). The development of the instability forone of these models (D2) is summarised in Fig. 4.12 and the computed distortion parameteris qualitatively very similar to the one presented in ref. [1] and shows that in this compactstar the bar [i.e. stage (b) of the classification made in Sec. 4.1.2] is very rapidly attenuatedas a result of the development of spiral arms, which are also responsible for a small loss ofmass.
The frequencies and the growth times found for these models are also in good agree-ment with those reported in ref. [1], but are not identical; differences are of about 10%(see Table 4.1 for a close comparison). While there are several differences in the numer-ical codes used, it should be noted that the simulations reported in ref. [1] made use of asubstantial perturbation in the m=2 mode, with an equivalent δ2 = 0.3. Although we werenot able to reproduce exactly the dynamics of these models (no convergent solution of theconstraint equations was found once such a large perturbation was introduced), we recallthat large perturbations for models near the threshold do induce a change in the growthrates and effectively reduce the growth times (see discussion in Sec. 4.2.3).
We believe therefore that the use of a smaller or zero perturbation is the largest sourceof the difference with the corresponding simulations in ref. [1], which we can neverthelessreproduce to very good precision.

4.3 Comparison with previous studies 26
Model ∆x/M δ1 δ2 EOS π-sym grid size ∆t t1 t2 τB
fB
η τD
(ms) (ms) (ms) (ms) (Hz) (max) (ms)U3 0.500 0.0 0.0 polytropic no medium 0.76 21 26 2.79 552 0.48 13.8U3 0.500 0.0 0.0 ideal fluid no medium 0 21 26 2.69 547 0.47 12.9U3 0.500 0.0 0.01 ideal fluid no medium -15.94 21 26 2.42 548 0.53 13.0U3 0.625 0.0 0.0 ideal fluid yes medium -1.00 21 26 2.82 543 0.43 24.4U3 0.625 0.0 0.01 ideal fluid yes medium -16.28 21 26 2.52 547 0.54 24.5U11 0.500 0.0 0.0 polytropic no medium 5.35 11 14 1.12 497 0.78 8.6U11 0.500 0.0 0.0 ideal fluid no medium 0 11 14 1.15 494 0.78 9.4U11 0.500 0.0 0.01 ideal fluid no medium -8.55 11 14 1.11 494 0.79 9.9U11 0.375 0.0 0.0 ideal fluid no medium 1.64 11 14 1.11 492 0.79 10.5U11 0.625 0.0 0.0 ideal fluid no medium 1.79 11 14 1.15 492 0.78 9.0U11 0.625 0.0 0.0 ideal fluid no large 2.54 11 14 1.15 492 0.78 9.8U11 0.625 0.0 0.0 ideal fluid yes medium 1.39 11 14 1.12 494 0.77 13.8U11 0.750 0.0 0.0 ideal fluid no medium 3.79 11 14 1.17 493 0.76 10.8U11 0.625 0.05 0.0 ideal fluid no medium 6.20 11 14 1.14 495 0.78 6.6U13 0.500 0.0 0.0 polytropic no medium 1.69 10 13 0.94 457 0.86 5.7U13 0.500 0.0 0.0 ideal fluid no medium 0 10 13 0.95 454 0.85 6.2U13 0.500 0.0 0.01 ideal fluid no medium -8.55 10 13 0.93 454 0.86 6.3U13 0.625 0.0 0.0 ideal fluid yes medium -0.16 10 13 0.96 453 0.86 6.5U13 0.625 0.0 0.01 ideal fluid yes medium -8.71 10 13 0.94 454 0.86 6.2D2 0.500 0.0 0.0 ideal fluid no medium 0 9 10.5 0.90 1053 0.59 –D2 0.500 0.0 0.01 ideal fluid no medium -6.54 9 10.5 0.78 1052 0.67 –D2 0.500 0.0 0.04 ideal fluid no medium -7.57 9 10.5 0.77 1056 0.67 –D3 0.500 0.0 0.0 ideal fluid no medium 0 9 12 1.54 1086 0.38 –D7 0.500 0.0 0.0 ideal fluid no medium 0 11 14 1.74 821 0.48 –
Table 4.1: Main properties of the initial part of the instability for the stellar models usedin the simulations. Starting from the left the different columns report: the grid spacing∆x/M, the amplitudes of the initial perturbations in the m=1 and m=2 modes δ1,2, theEOS, the symmetry and the grid size used, the time shift ∆t [cf. eq. (4.1)], the times t1 andt2 between which the growth-times τ
Band the frequencies f
Bare computed, the maximum
value of the distortion parameter η, and the duration of the bar deformation τD
.

4.3 Comparison with previous studies 27
-40 -20 0 20 40
-40
-20
0
20
40
Iteration 25000, t=23.09 msec
U3
-40 -20 0 20 40
-40
-20
0
20
40
Iteration 14000, t=12.93 msec
U11
-40 -20 0 20 40
-40
-20
0
20
40
Iteration 13000, t=12.01 msec
U13
-40 -20 0 20 40
-40
-20
0
20
40
Iteration 32500, t=30.01 msec
U3
-40 -20 0 20 40
-40
-20
0
20
40
Iteration 18700, t=17.27 msec
U11
-40 -20 0 20 40
-40
-20
0
20
40
Iteration 18000, t=16.62 msec
U13
-40 -20 0 20 40
-40
-20
0
20
40
Iteration 40500, t=37.4 msec
U3
-40 -20 0 20 40
-40
-20
0
20
40
Iteration 27800, t=25.67 msec
U11
-40 -20 0 20 40
-40
-20
0
20
40
Iteration 23600, t=21.8 msec
U13
-40 -20 0 20 40
-40
-20
0
20
40
Iteration 70000, t=64.65 msec
U3
-40 -20 0 20 40
-40
-20
0
20
40
Iteration 57000, t=52.64 msec
U11
-40 -20 0 20 40
-40
-20
0
20
40
Iteration 57000, t=52.64 msec
U13
Figure 4.1: Snapshots of the evolution of models U3, U11 and U13 at various times.The different columns refer to the three models and show isodensity contours for ρ =0.9, 0.8, 0.7, 0.6, 0.5−2j × ρmax, where j = 1, . . . , 6 and ρmax is the maximum value of ρ ineach panel. The above model were evolved on a 193× 193× 68 grid with grid coordinateresolution of 0.5 M (0.74km) and imposing equatorial symmetry. The time evolution ofsome quantities characterising these models is reported in Figs. 4.2, 4.3 and 4.4.

4.3 Comparison with previous studies 28
Figure 4.2: Time evolution of the instability for model U3. The top panel shows the be-haviour of the quadrupole distortion parameter η+ [cf. eq. (3.15)], the middle panel reportsthe behaviour of the power in the Fourier modes m=1, 2, 3 and 4, while the bottom paneldisplays the phase of the m=2 mode.
Figure 4.3: The same as Fig. 4.2 but for model U11.

4.3 Comparison with previous studies 29
Figure 4.4: The same as Fig. 4.2 but for model U13.
m=2
time
ln(|P
|) m
(c)(a) (b) (d)
m=3
m=1
m=4
Figure 4.5: Schematic evolution of the collective modes (Eq. 7.10) of the rest-mass densityρ. In this diagram the instability is distinguished in four representative stages: (a) exponen-tial growth of the m=2 mode and m=3 mode; (b) saturation of the instability, developmentof spiral arms and progressive attenuation of the bar deformation; (c) crossing of m=3mode and m=4 mode and consequent attenuation of the bar, emergence of the m=1-modeas the dominant one; (d) suppression of the bar deformation and emergence of an almostaxisymmetric configuration.

4.3 Comparison with previous studies 30
Figure 4.6: The role of the π-symmetry on the dynamics for model U3. Shown from thetop are the deformation parameter η, the power in the m=2 mode and in the m=1-mode(dashed line), the evolution of the position of the “centre of mass” (the horizontal dashedlines mark the edges of the central cell) and that of the rest mass. The dotted and continuouslines refer to simulations without and with π-symmetry, respectively.

4.3 Comparison with previous studies 31
Figure 4.7: The same as in Fig. 4.6 but for model U13.
Figure 4.8: Dynamics of the rotational kinetic energy T [cf. eq. (3.8)] and of the internalenergy Eint [cf. eq. (3.6)] for models U3, U11 and U13, when normalized to their initialvalues.

4.3 Comparison with previous studies 32
Figure 4.9: Effect of an initial m=2 mode perturbation on the dynamics of the deformationparameter η(t) (top sub-panels) and of the modes P2(t) and P1(t) (bottom sub-panels) formodel U3 (left) and U13 (right), respectively. The continuous lines represent the evolutionof the perturbed model after a suitable phase and time shifts.

4.3 Comparison with previous studies 33
Figure 4.10: Effect of an initial perturbation on the dynamics of the deformation parameterη (top panels) and of the mode powers P2(t), P1(t) for model U11. The left panel showsthe effects of an initial m=2 mode perturbation, while the right one those of an m=1-modeperturbation.

4.3 Comparison with previous studies 34
Figure 4.11: Effects on the evolution of the deformation parameter η (top panels) and themodes P2(t) and P1(t) (bottom panels) of model U11 caused by: (left) the use of theadiabatic polytropic EOS; (right) the use of a larger simulation grid, where the distance ofthe outer boundary from the center is increased from 48 M to 66 M on the (x, y)-planeand from 32 M to 47 M along the z direction.

4.3 Comparison with previous studies 35
Figure 4.12: The same as in Fig. 4.6 but for model D2. In addition, the bottom panel showsthe evolution of the phase for the m =2-mode.

4.3 Comparison with previous studies 36

Chapter 5
Determination of the threshold
An important consequence of the high accuracy of our simulations it that it has allowed for arather precise determination of the stability threshold for the sequence of models consideredhere. Of course, the determination of the threshold to the third significant figure has littlebut academic interest, as it is expected not to be universal, but rather to depend (althoughweakly) on properties such as the degree of differential rotation, the compactness, the EOS,etc.. Nevertheless, this is a useful exercise for at least two different reasons. Firstly, it helpsin characterizing the dynamics of slightly supercritical models and, secondly, it allowsfor a direct comparison with perturbative studies, highlighting when the latter cease to beaccurate and how they can be improved.
In what follows we discuss two different methods we have used to this aim. The firstone simply selects the initial model with the lowest value of β for which an exponen-tial growth in the distortion parameter is seen. The second one, on the other hand, usesthe classical Newtonian stability analysis of Maclaurin spheroids for incompressible self-gravitating fluids in equilibrium [2] to extrapolate the position of the threshold also in afully general-relativistic regime. Interestingly, the results of the two approaches agree tohigh precision.
5.1 First method: dynamical evaluation
The approach followed here is straightforward and consists of performing a number ofsimulations for models with decreasing values of the instability parameter β and determinethe critical value βc as the smallest one for which an exponential growth of the distortionparameter η is observed. More specifically, we have performed a set of 10 ms simulations ofmodels characterized by values of β between β = 0.24 and β = 0.255, interval in which theinstability was reported to develop [1, 20, 21]. In order to remove a possible contaminationby the Cartesian discretization through the power in the m=4 mode, all the models had avery small m=2-mode perturbation with δ2 = 0.04, making this the largest mode powerinitially. Furthermore, since this kind of initial m=2-mode perturbation always generates,at least temporarily, a growth of the distortion, we classified as unstable those models forwhich an exponentially growing bar deformation was observed during the simulated 10 ms.
As a result of this set of simulations and of additional refinements of the bracketing
37

5.2 Second method: critical fit 38
Figure 5.1: Dynamics of the instability near the threshold. The two panels summarise twolong-term evolutions for model S1 (continuous line) and U1 (dashed line) and show thedistortion parameter and the power in the m=2 and m=4 modes.
interval for the instability, we have concluded that the threshold had to be found betweenmodels U2 and S2, although it was not yet obvious whether any or all of these models wereunstable. A more precise determination of the nature of these models has therefore requiredmuch longer simulations to be performed and that no initial perturbation was introduced. Asummary of these long-term simulations is reported in Fig. 5.1, which shows the evolutionfor models U1 and S1. The upper panel, in particular, shows the amplitude of the distortionparameter η× for model S1 (continuous line) and U1 (dotted line), respectively, while thelower panel shows the evolution of the power in the m=2 mode; indicated also with adashed line is the average value of the m=4-mode power for model S1, which does notshow an appreciable growth.
While it is evident that model U1 develops an instability over the timescale of the sim-ulation, S1 does not, implying that the threshold for the onset of the dynamical barmodeinstability for the sequence under investigation is βc ' 0.255. We are aware it may beargued that model S1 is also unstable but with a much smaller growth rate; assessing inpractice this would require simulations which are prohibitive with the present computa-tional facilities. However, confidence that the result obtained is correct is also provided bycritical-fit analysis, which will be discussed in the following Chapter.
5.2 Second method: critical fitThe classical Newtonian study of the barmode instability is based on the stability analysisof Maclaurin spheroids for an incompressible and self-gravitating fluid in equilibrium [2].We recall that by considering the linearized form of the second-order virial equation, whichgoverns the small oscillations around the equilibrium configuration, it is possible to show

5.2 Second method: critical fit 39
Model β δ2 t1 t2 η τB
fB
(ms) (ms) (max) (ms) (Hz)S6 0.240 0.04 3 9 0.02 – 740+145
−64
S5 0.245 0.04 3 9 0.02 – 705+123−64
S4 0.250 0.04 3 9 0.03 – 656+71−65
S3 0.252 0.04 3 9 0.04 – 611+43−30
S2 0.253 0.04 3 9 0.05 – 588+25−12
S1 0.254 0.04 3 9 ∗ 9.71 578+15−21
U1 0.255 0.04 3 9 ∗ 5.26 567+6−4
S1 0.254 0.0 45 63 0.02 – 599+209−209
U1 0.255 0.0 45 63 ∗ 22.1 588+56−96
Table 5.1: The Table reports for some models near the instability threshold: the ratio βof the rotational kinetic energy to the gravitational binding energy; the initial m=2-modeperturbation δ2; the bounds t1 and t2 of the considered time interval; the maximum distor-tion η; the growth rate τ
Band the frequency f
Bof the barmode during the initial part of
the instability. For these models, ∆x/M = 0.5 and π-symmetry is not used. The growthrate τ
Band the frequency f
Bof the barmode are obtained making a least-square fit of η+(t)
(eq.3.16) between t1 and t2. The ∗ indicates that η did not reach a maximum before thesimulation was stopped.
that the toroidal m=2 perturbations have complex eigenvalues given by (we here use Chan-drasekhar’s notation of ref. [2])
σ = Ω(e)±√
4B11(e)− Ω2(e) , (5.1)
where e is the eccentricity of the Maclaurin spheroids relative to an incompressible New-tonian star (e = 1 for a spherical star) and
B11 =3 e− 5 e3 + 2 e5 +
√1− e2 (4 e2 − 3) arcsin(e)
4 e5,
Ω2 =6 (e2 − 1)
e2+
2 (3− 2 e2)√
1− e2 arcsin(e)
e3.
(5.2)
As customary in perturbative studies, the real part of the eigenfrequency σ represents thecharacteristic frequency of the small perturbation, while its imaginary part measures theexponential growth time of the m=2 mode and is nonzero if 4B11(e) − Ω2(e) < 0, withthe threshold for the instability being marked by the value of the eccentricity for which4B11(e) − Ω2(e) = 0. In the case of an incompressible Newtonian star, the eccentricity eand the instability parameter β are related as
β(e) = −1 +3
2e2− 3
√1− e2
2e arcsin(e). (5.3)
Equation (5.1) is most conveniently rewritten in terms of the instability parameter β as
σ = Ω(β)± i
τ(β), (5.4)

5.2 Second method: critical fit 40
Model β t1 t2 η τB
fB
(ms) (ms) (max) (ms) (Hz)U2 0.2581 16.9 22.4 0.3734 3.438+2.39
−1.26 552+72−30
U3 0.2595 19.9 24.2 0.4241 2.678+1.33−1.23 544+86
−39
U4 0.2621 15.3 18.3 0.5496 1.854+0.13−0.17 540+14
−12
U5 0.2631 16.2 19.0 0.5788 1.748+0.12−0.10 538+6
−13
U6 0.2651 14.5 17.1 0.6305 1.574+0.05−0.04 528+6
−3
U7 0.2671 14.2 16.4 0.6694 1.408+0.06−0.06 522+8
−15
U8 0.2686 12.2 14.3 0.7027 1.319+0.06−0.03 518+3
−6
U9 0.2701 13.2 15.2 0.7223 1.269+0.05−0.04 512+3
−1
U10 0.2721 13.7 15.6 0.7482 1.184+0.05−0.03 503+18
−7
U11 0.2743 12.9 14.7 0.7749 1.116+0.04−0.01 493+4
−11
U12 0.2761 12.0 13.7 0.7999 1.066+0.03−0.03 486+5
−6
U13 0.2812 11.2 12.7 0.8551 0.952+0.02−0.02 453+5
−7
Table 5.2: Same quantities as in Table 5.1, but referring to the models evolved with a gridsize of ∆x/M = 0.625, with π-symmetry and no perturbation. The growth rate τ
Band
the frequency fB
of the barmode are obtained making a least-square fit of η+(t) (eq.3.16)between t1 and t2. The interval [t1, t2] is here determined, differently from the previoustables, as the one in which η(t) is between 5% and the 25% of its first maximum. Thesemodels were used to determine the threshold.
where1/τ 2 ≡ −4B11(β) + Ω2(β) . (5.5)
With this in mind it is natural to ask how accurate is the Newtonian description of anincompressible Maclaurin spheroid in describing the nonlinear dynamics of a relativisticdifferentially rotating star. Of course also in full General Relativity the transition betweenstable and dynamical unstable barmodes will be described by a change from real to imag-inary of the m=2-mode eigenfrequency and it is therefore reasonable to expect that thefrequencies and the growth times depend on β as
Ω(β)
2π≈ fc + f (1)
c (β − βc) + f (2)c (β − βc)
2 , (5.6)
1
τ 2≈ 1
k2(β − βc) . (5.7)
Using this ansatz, we have performed a series of simulations for models U2–U13 using a π-symmetry and a grid resolution of ∆x/M = 0.625, through which we have computed thevalues for f
Band τ
Bby means of a nonlinear least-square fit to the trial form of eq. (3.16).
Making use of these results, which are collected in Table 5.2, we have then again used aleast-square fit of the values f
Band τ
Bto the expected β dependence of eqs. (7.12) and
(7.13) to obtain the unknown coefficients fc, f(1)c , f
(2)c , k and βc:
fc = 554 Hz , f (1)c = −1668 Hz , f (2)
c = −85635 Hz ,
βc = 0.2554 , k = 0.153 ms .

5.2 Second method: critical fit 41
0.24 0.26 0.280
200
400
600
800
1000
1200
1400
Figure 5.2: Left panel: critical diagram as constructed with the frequencies and growthtimes relative to the unperturbed models of Table 5.2 (triangles) and to the perturbed mod-els of Table 5.1 (squares). The continuous lines represent the two fitted curves for Ω(β) andτ(β), while the dotted lines the corresponding extrapolations below the threshold. Rightpanel: same data as in the left panel but magnified around the critical threshold and ex-pressed in terms of 1/τ 2 to highlight the very good fit.
In the left panel of Fig. 7.2 we summarize the results of this fit for the models U2–U13 and show the corresponding error bars. In particular, we denote with triangles theunperturbed models reported in Table 5.2, while with squares the perturbed models in Table5.1. In addition, the continuous lines represent the two fitted curves for Ω(β) and τ(β),while the dotted line refers to the corresponding extrapolations below the threshold. Wenote that the error bars in Fig. 7.2 are computed in different ways for the growth rates andthe frequencies. In the first case they are computed as the difference between the minimumand maximum values of d log(η(t))/dt in the time intervals between t1 and t2 reported inTable 5.2. In the second case, instead, the error bars are determined using the minimumand maximum values over the time intervals between t1 and t2 reported in Tables 5.1 and5.2 of the pattern speeds extracted from the collective phase φ2(t) of eq. (3.19).
A number of comments are worth making. Firstly, it is apparent that the Newtonian de-scription of the instability in terms of incompressible Maclaurin spheroids is surprisinglyaccurate also in full General Relativity and for differentially rotating stars. This is espe-cially so for models which are far from the instability threshold, for which the error barsare very small and below 5%. Secondly, as the models approach the critical threshold fromabove (i.e, unstable models), the growth times become increasingly large and the numeri-cal errors increasingly more important for the resolutions we could use. Yet, even in thisregime the perturbative predictions are accurate to better than 15%. Finally, as the modelsapproach the critical threshold from below (i.e, stable models), the frequencies of the os-cillations triggered by the use of an initial perturbation are similar to the spin frequencies,making the determination of the eigenfrequencies increasingly difficult and hence inaccu-

5.2 Second method: critical fit 42
rate (cf. the large error bars for models denoted by squares in the left panel of Fig. 7.2).Finally we note that the independent determination of the threshold for the instability
provided by the fit to eq. (7.13) (i.e. βc = 0.2554) is in surprisingly good agreement withthe one obtained in the previous Chapter, i.e. βc ' 0.255, confirming the accuracy of thedynamical determination and suggesting that model S1 is indeed stable. The very good fitof the data is shown in the right panel of Fig. 7.2, which reports the same data as in the leftpanel but magnified around the critical threshold and shown in terms of 1/τ 2 to highlightthe functional dependence as expressed by eq. (7.13).

Chapter 6
Gravitational-Wave emission anddetection of the unstable models
Among the goals of this study is to assess whether a dynamical barmode instability trig-gered in a neutron-star model could be a good source of gravitational radiation for thedetectors presently collecting data (LIGO, GEO), in the final stages of construction (Virgo)or in the planning phase (Dual) [41]. The use of uniform grids in these calculations hasprevented us from placing the outer boundaries at distances sufficiently large so that agauge-invariant extraction of the gravitational waves is possible [42, 43, 44]. However,a reasonable measure of the amplitude of the expected gravitational radiation and of theconsequent SNR is still possible by making use of the standard quadrupole formula [45].A number of comparative tests have been carried out among the various ways in which thegravitational-wave amplitudes can be estimated (see, for instance, refs. [46, 22, 47]) andwe expect the error in this case to be O(M/R) [48] and thus of a few percent only.
In this approximation, the observed waveform and amplitude for the two polarizationsmeasured by an observer situated at infinity along the z-axis are
h+ =Ixx(t′)− Iyy(t′)
r,
h× = 2Ixy(t′)
r,
(6.1)
where t′ = t− r is the retarded time. The total gravitational wave luminosity is then givenby
E =1
5
⟨...I
ij ...I ij
⟩, (6.2)
while the angular momentum loss is
Ji =2
5
⟨εijkI
jl...I lk
⟩. (6.3)
We note that the definition of the quadrupole tensor is not unique as ρ and D coincide ina Newtonian approximation and either of them could be used. Following ref. [1], we adoptthe definition expressed in eq. (7.6), as this allows us to exploit the conservation equation
43

CHAPTER 6. Gravitational-Wave emission and detection of the unstable models 44
Model ∆M/M ∆J/J hrss SNR SNR SNR SNR(10−5) (10−3) (10−20) V L AL Dual
U3 7.75 3.82 1.39 117 82.5 1590 19U11 9.48 4.84 1.74 155 119 2040 23U13 6.23 3.18 1.51 138 114 1780 30D2 52.6 10.2 2.50 136 79.8 2270 892
Table 6.1: List of the representative gravitational-wave quantities computed in the New-tonian quadrupole approximation for models U3, U11, U13 and D2. From the left thedifferent columns report: the fractional amounts of the energy and angular momentum car-ried by the gravitational radiation (∆M/M and ∆J/J , respectively), the root-sum-squareof h+ for a source at 10 kpc, and the SNRs for Virgo, LIGO, Advanced LIGO and Dual.
for D to perform analytically the first time derivative of the quadrupole tensor and obtainthat
I ij =
∫d3x D
[xi(αvj + βj) + xj(αvi + βi)
], (6.4)
from which we compute the second I ij and third...I
ij time-derivatives using first-order finitedifferencing. This approach not only is simpler, but it is indeed the only possible one, sinceour second-order–accurate scheme would not allow for an accurate direct calculation of...I
ij (see discussion in Appendix A of ref. [44]).In Fig. 6.1 the we show the waveforms for the “cross” polarization computed in this
way, as measured along the z-axis for models U3, U11, U13 and D2 (We recall that the“cross” and “plus” waveforms for a stationary and rotating bar differ only by a phase, sincethe emission is circularly polarized). Clearly, the gravitational-wave signal mimics (moduloa factor of 2 in the frequency) the dynamical behaviour of the bar deformation, with signalsthat are longer for models near the stability threshold (i.e. model U3), and with amplitudeswhich increase for the more compact model D2.
A convenient measure of the strength of the signal can be given in terms of the root-sum-square amplitude of, say, the plus polarization
hrss =
[∫ +∞
−∞dt h2
+(t)
]1/2
, (6.5)
since hrss has the same units as the strain-noise amplitude of the detectors and it is there-fore possible to obtain a rough estimate of the SNR simply dividing it by the strain-noiseamplitude at the frequency where the signal is the strongest. In Table 6.1 we report thevalues of hrss for a signal coming from a source at 10 kpc, together with the SNR computedassuming the optimal use of match-filtering techniques and given by
S
N= 2
√∫ +∞
0
d log f|h+(f)|2f
Sn(f), (6.6)
where h+(f) is the Fourier transform of h+(t) and Sn(f) is the designed sensitivity of eitherVirgo (V), LIGO (L), Advanced LIGO (AL) or of the planned resonant detector Dual. Of

CHAPTER 6. Gravitational-Wave emission and detection of the unstable models 45
course, the SNR is inversely proportional to the distance from the source and the valuesreported in Table 6.1 indicate that, while an instability developing in a rapidly rotatingstar in our Galaxy would yield an extremely strong signal, the SNR is still expected to beO(1) also for a source as far as about 10 Mpc if measured by Advanced LIGO. A differentrepresentation of the results summarised in Table 6.1 is offered Fig. 6.2, which shows aspectral comparison between the designed sensitivity hrms(f) ≡
√Sn(f) of Virgo, LIGO
and Advanced LIGO and the power spectrum |h+(f)|f 12 of the expected signals for models
U3 and U13.It is interesting to note the significant differences in the power spectrum of the two
signals, with the one relative to model U3 having a larger and narrower peak as a resultof a more persistent bar. Yet, the SNR for model U3 is significantly smaller that the onefor both models U11 and U13 and a number of different factors are behind this somewhatsurprising result. Firstly, while the bar is indeed more persistent for U3, the amplitudeof the bar distortion is larger for models U11 and U13, thus larger is the correspondinggravitational-wave signal. Secondly, the frequency of the power-spectrum maximum issmaller for models U11 and U13 and thus better fitting the sensitivities of the detectors.Finally, the idealised assumption that match-filtering techniques can be used at all frequen-cies implies that all of the power spectrum contributes to the final SNR and the large wingsof the spectra of models U11 and U13 can significantly increase the SNR. Indeed, whenevaluating eq. (6.6) in a narrow window of 100 Hz around the peak, the SNR among thedifferent models is comparable.
Of course, a strong SNR is just a necessary condition for the detection and the possibil-ity of measuring the gravitational-wave signal from this process will depend significantlyon its event rate, which is still largely uncertain. In the case in which the instability devel-ops in a hot protoneutron star resulting from the collapse of a stellar core, the event rate isstrictly related to the supernova event rate, which is of 1 or 2 supernova per century and pergalaxy. About 60% of the remnants of the explosion should be neutron stars, but the re-quirement of rapid rotation in the progenitor makes the event rate of dynamical instabilitiesconsiderably lower [49], although such prospect may be better now [?]. On the other hand,in the case the bar is produced as a result of a binary merger of neutron stars, the most opti-mistic scenarios suggest that such mergers may occur approximately once per year withina distance of about 50 Mpc [50]. Finally, the event rate of the classical scenario in whichthe instability is triggered in an old neutron star spun up by accretion in a binary system,still remains difficult to quantify.

CHAPTER 6. Gravitational-Wave emission and detection of the unstable models 46
Figure 6.1: Gravitational-wave signals along the z-axis for the “cross” polarization as com-puted in the Newtonian quadrupole approximation for models U3, U11, U13 and D2.

CHAPTER 6. Gravitational-Wave emission and detection of the unstable models 47
Figure 6.2: Comparison between |h(f)|f 1/2 for models U3 and U13 at 10kpc and thesquare-root of the power spectrum of the noise of Virgo (dashed line), LIGO (dotted line),Advanced LIGO (dotted-line) and the planned resonant detector Dual (dot-dashed line).Note the significant difference in the power spectrum of the two signals, with the onerelative to model U3 having a larger and narrower peak at about 600 Hz, produced by themore persistent bar deformation.

CHAPTER 6. Gravitational-Wave emission and detection of the unstable models 48

Chapter 7
Extension to higher compactness
7.1 Initial data and numerical evolution methodIn this work we deal with the full 3D evolution of the Einstein equation coupled to perfectfluid matter:
Gµν = 8πTµν , where T µν = ρ
(1 + ε +
p
ρ
)uµuν + pgµν (7.1)
and uµ is the fluid 4-velocity, p is the fluid pressure, ε the specific internal energy and ρ therest-mass density, so that e = ρ(1 + ε) is the energy density in the rest frame of the fluid.The evolution of the spacetime must be supplemented by the evolution of the relativistichydrodynamics equations: the conservation laws for the energy, momentum (∇µT
µν = 0)and baryon number (∇µ(ρuµ) = 0), supplemented with an equation of state (EOS) of typep = p(ρ, ε).
The initial data for our simulations are computed as stationary equilibrium solutions foraxisymmetric and rapidly rotating relativistic stars in polar coordinates [36]. In generatingthese equilibrium models the metric describing an axisymmetric relativistic star is assumedto have the form
ds2 = −eµ+νdt2 + eµ−νr2 sin2 θ(dφ− ωdt)2 + e2ξ(dr2 + r2dθ2) (7.2)
where µ, ν, ω and ξ are space-dependent metric functions. As in [51], we assume the matterto be characterized by a non-uniform angular velocity distribution of the form
Ωc − Ω =r2e
A2
[(Ω− ω)r2 sin2 θe−2ν
1− (Ω− ω)2r2 sin2 θe−2ν
], (7.3)
where re is the coordinate equatorial stellar radius and the coefficient A is a measure ofthe degree of differential rotation, which we set to A = 1. All the equilibrium modelsconsidered here have been calculated using the relativistic polytropic EOS (p = KρΓ) withK = 100 and Γ = 2 and are members of four sequences having a constant amount ofdifferential rotation with A = 1 and a constant rest mass M0 equal to 1.0 M, 1.51 M,2 M and 2.5 M, respectively. The main properties of all the four sequences of considered
49

7.1 Initial data and numerical evolution method 50
Figure 7.1: Position on the (M/R, β) plane of the considered stellar models. Indicatedrespectively with stars and filled circles are the m = 2-stable and m = 2-unstable modelsbelonging to the four sequences of constant rest mass. Triangles refer instead to modelswhere the m=3 deformation is the fastest growing one.
models are reported, respectively, in 7.1, 7.2, 7.3 and 7.4. The reported quantities, such asthe baryonic mass M0, the gravitational mass M , the angular momentum J , the rotationalkinetic energy T, the gravitational binding energy W and the instability parameter β =T/W are computed using the following definitions:
M0 ≡∫
d3x√
γwρ , M ≡∫
d3x(−2T 0
0 + T µµ
)α√
γ ,
Eint ≡∫
d3x√
γwρε , J ≡∫
d3x T 0φα√
γ ,
T ≡ 1
2
∫d3x ΩT 0
φα√
γ , W ≡ T + Eint + M0 −M ,
(7.4)
where α is the lapse function,√
γ is the square root of the three-dimensional metric deter-minant and w = αu0 is the fluid Lorentz factor. We recall that the definitions of quantitiessuch as J , T, W and β are meaningful only in the case of stationary axisymmetric config-urations and should therefore be treated with care once the rotational symmetry is lost.
Traditionally, numerical simulations of the dynamical barmode instability have beensometimes sped up by introducing very large initial m=2 deformations in the initial con-

7.1 Initial data and numerical evolution method 51
Table 7.1: Main properties of the stellar models of the sequence with M0 = 1M. Startingfrom the left: the name of the simulation, the compactness M/Re, the instability parameterβ, the central rest-mass density ρc, the ratio between the polar and the equatorial coordinateradii rp/re, the proper equatorial radius Re, the gravitational mass M , the total angularmomentum J divided by the square of the gravitational mass, the rotational periods at theaxis Pa and at the equator Pe.
Mod M/Re β ρc rp/re Re M J/M2 Pa Pe
(10−4) (ms) (ms)
Ua1 0.0408 0.2671 0.9107 0.27684 23.95 0.978 1.960 2.017 4.402Ua2 0.0406 0.2690 0.8668 0.27149 24.11 0.979 1.979 2.040 4.449Ua3 0.0403 0.2711 0.8168 0.26550 24.29 0.978 2.001 2.068 4.506Ua4 0.0401 0.2730 0.7672 0.25918 24.45 0.980 2.021 2.094 4.559Ua5 0.0398 0.2750 0.7087 0.25173 24.63 0.979 2.044 2.127 4.626Ua6 0.0394 0.2771 0.6429 0.24288 24.83 0.979 2.070 2.164 4.702Ua7 0.0391 0.2790 0.5662 0.23177 25.04 0.980 2.098 2.207 4.791Ua8 0.0387 0.2814 0.4369 0.21044 25.37 0.982 2.142 2.283 4.945
dition. As discussed in [51], the introduction of any perturbation (especially when this isnot a small one) may lead to spurious effects and erroneous interpretations. Being awareof this, we used, only in some selected simulations below the threshold, initial densityperturbations of the type
δρ2(x, y, z) = δ2
(x2 − y2
r2e
)ρ , (7.5)
where δ2 is the magnitude of the m=2 perturbation (which we set to be δ2 ' 0.01− 0.04).This perturbation has then the effect of superimposing on the axially symmetric initialmodel a barmode deformation that is larger than the (unavoidable) m=4-mode perturbationintroduced by the Cartesian grid discretization. The introduction of such perturbation al-lowed us to estimate the frequency of the m=2 mode below the threshold for the onset ofthe instability.
We solve the Einstein equations 7.1 formulated as a first-order (in time) quasi-linear [26]system of equations, where the independent variables are the three-metric γij and the extrin-sic curvature Kij . In particular, we use the conformal traceless reformulation of the ADMsystem of evolution equations, as first suggested by Nakamura, Oohara and Kojima [28](NOK formulation), in which the evolved variables are the conformal factor (φ), the traceof the extrinsic curvature (K), the conformal 3-metric (γij), the conformal traceless ex-trinsic curvature (Aij) and the conformal connection functions (Γi). The resolution of thehydrodynamics equation is performed using the general-relativistic hydrodynamics codeWhisky, in which the hydrodynamics equations are written as finite differences on a Carte-sian grid and solved using high-resolution shock-capturing (HRSC) schemes, as describedin Baiotti et al. [24, 25]. During the evolution we use the “ideal-fluid” (p = (Γ − 1)ρε)EOS. Full details of the numerical scheme and the gauge conditions used are reported in

7.2 Methodology of the analysis 52
Table 7.2: Same quantities as in 7.1 for the sequence of models with M0 = 1.51M.
Mod M/Re β ρc rp/re Re M J/M2 Pa Pe
(10−4) (ms) (ms)
Sb6 0.0713 0.2403 2.2610 0.33600 20.32 1.449 1.411 1.282 3.002Sb5 0.0703 0.2451 2.1280 0.32600 20.70 1.456 1.439 1.308 3.057Sb4 0.0687 0.2503 1.9620 0.31500 21.14 1.452 1.476 1.348 3.137Sb3 0.0684 0.2520 1.9155 0.31134 21.27 1.456 1.485 1.357 3.156Sb2 0.0682 0.2530 1.8845 0.30915 21.35 1.456 1.492 1.364 3.171Sb1 0.0682 0.2541 1.8600 0.30691 21.42 1.461 1.497 1.368 3.179Ub1 0.0674 0.2551 1.8120 0.30450 21.54 1.452 1.509 1.384 3.210Ub2 0.0669 0.2581 1.7233 0.29779 21.78 1.457 1.527 1.403 3.251Ub3 0.0664 0.2595 1.6730 0.29433 21.91 1.456 1.539 1.416 3.278Ub4 0.0659 0.2621 1.5879 0.28813 22.13 1.458 1.557 1.437 3.321Ub5 0.0656 0.2631 1.5534 0.28560 22.22 1.459 1.564 1.446 3.339Ub6 0.0651 0.2651 1.4812 0.28033 22.40 1.459 1.579 1.465 3.377Ub7 0.0646 0.2671 1.4055 0.27474 22.59 1.459 1.596 1.485 3.418Ub8 0.0642 0.2686 1.3465 0.27028 22.73 1.460 1.608 1.500 3.451Ub9 0.0638 0.2701 1.2844 0.26554 22.88 1.460 1.621 1.517 3.486Ub10 0.0633 0.2721 1.1960 0.25858 23.08 1.461 1.639 1.542 3.536Ub11 0.0626 0.2743 1.0920 0.25012 23.31 1.460 1.660 1.572 3.598Ub12 0.0622 0.2761 0.9938 0.24151 23.52 1.462 1.679 1.599 3.655Ub13 0.0601 0.2812 0.5990 0.20012 24.31 1.462 1.753 1.723 3.910
[51].
7.2 Methodology of the analysisA number of different quantities are calculated during the evolution to monitor the dynam-ics of the instability. Among them is the quadrupole moment of the matter distribution,which we compute in terms of the conserved density D rather than of the rest-mass densityρ or of the T00 component of the stress energy momentum tensor
Ijk =
∫d3x
√γWρ xjxk . (7.6)
Of course, the use of√
γWρ in place of ρ or of T00 is arbitrary and all the three expressionswould have the same Newtonian limit. However, we priviledge the form (7.6) because√
γWρ is a quantity whose conservation is guaranteed by the form chosen for the hydrody-namics equations. The quantity (7.6) can be conveniently used to quantify both the growthtime τ
Bof the instability and the oscillation frequency f
Bof the unstable barmode once
the instability is fully developed. In practice, we perform a nonlinear least-square fit ofthe computed quadrupole Ijk(t) and we generally use the xy component, with the trial

7.2 Methodology of the analysis 53
Table 7.3: Same quantities as in 7.1 for the sequence of models with M0 = 2M.
Mod M/Re β ρc rp/re Re M J/M2 Pa Pe
(10−4) (ms) (ms)
Sc1 0.0980 0.2480 2.9091 0.31987 19.42 1.902 1.263 1.007 2.514Uc1 0.0931 0.2595 2.3176 0.29240 20.48 1.907 1.333 1.088 2.682Uc2 0.0917 0.2631 2.1264 0.28298 20.82 1.908 1.356 1.116 2.741Uc3 0.0900 0.2670 1.8982 0.27117 21.23 1.911 1.384 1.152 2.815Uc4 0.0880 0.2716 1.6079 0.25516 21.74 1.913 1.420 1.200 2.916Uc5 0.0858 0.2761 1.2663 0.23377 22.32 1.916 1.460 1.260 3.042Uc6 0.0841 0.2790 0.9669 0.21142 22.82 1.920 1.495 1.317 3.161
functionsIjk(t) = Ijk
0 et/τB cos(2π f
Bt + φ0). (7.7)
We defined the envelop I(t) of the quadrupole and the distortion parameter η(t) as:
I ≡ 1
2
√(2Ixy)2 + (Ixx − Iyy)2 , η ≡ I
2(Ixx + Iyy)−1 . (7.8)
The instantaneous orientation of the bar is given by:
φQ? = arctan(2Ixy/(Ixx − Iyy)). (7.9)
In addition, as a useful tool to describe the nonlinear properties of the development andsaturation of the instability, the rest-mass density is decomposed into its Fourier modesPm(t). These modes and their phases φm are defined as:
Pm ≡∫
d3x ρ eimφ , φm ≡ arg(Pm) . (7.10)
The phase φm essentially provides the instantaneous orientation of the m-th mode whenthe corresponding mode has a nonzero power. One should keep in mind that, despite theirdenomination, the Fourier modes (7.10) do not represent proper eigenmodes of oscillationof the star. While, in fact, the latter are well defined only within a perturbative regime, theformer simply represent a tool to quantify, within the fully nonlinear regime, what are themain components of the rest-mass distribution. Stated differently, we do not expect thatquasi-normal modes of oscillations to be present but in the initial and final stages of theinstability, for which a perturbative description is adequate.
Note that all quantities (7.6-3.19) are expressed in terms of the coordinate time t anddo not represent therefore invariant measurements at spatial infinity. However, for thesimulations reported here, the lengthscale of variation of the lapse function at any giventime is always larger than twice the stellar radius at that time, ensuring that the events onthe same timeslice are also close in proper time.

7.3 Effects of the compactness 54
Table 7.4: Same quantities as in 7.1 for the sequence of models with M0 = 2.5M.
Mod M/Re β ρc rp/re Re M J/M2 Pa Pe
(10−4) (ms) (ms)
Sd6 0.1412 0.2350 5.0710 0.34714 16.49 2.329 1.056 0.678 1.897Sd5 0.1376 0.2400 4.6380 0.33596 16.95 2.333 1.081 0.706 1.955Sd4 0.1341 0.2450 4.2188 0.32450 17.42 2.337 1.106 0.735 2.016Sd3 0.1329 0.2470 4.0607 0.31991 17.61 2.340 1.116 0.746 2.040Sd2 0.1321 0.2480 3.9735 0.31745 17.71 2.340 1.122 0.753 2.054Sd1 0.1314 0.2491 3.8899 0.31503 17.81 2.341 1.127 0.760 2.068Ud1 0.1302 0.2510 3.7335 0.31027 18.00 2.343 1.138 0.772 2.094Ud2 0.1254 0.2580 3.1583 0.29210 18.74 2.349 1.178 0.821 2.198Ud3 0.1220 0.2631 2.7402 0.27760 19.29 2.353 1.208 0.861 2.282Ud4 0.1207 0.2650 2.5698 0.27128 19.52 2.356 1.221 0.878 2.318Ud5 0.1196 0.2666 2.4336 0.26609 19.71 2.357 1.231 0.892 2.348Ud6 0.1189 0.2675 2.3534 0.26291 19.82 2.358 1.238 0.901 2.366Ud7 0.1186 0.2680 2.3022 0.26083 19.89 2.359 1.241 0.906 2.377Ud8 0.1171 0.2701 2.1102 0.25286 20.16 2.360 1.256 0.927 2.423Ud9 0.1164 0.2710 2.0153 0.24868 20.29 2.362 1.264 0.938 2.445Ud10 0.1156 0.2721 1.9104 0.24399 20.44 2.362 1.272 0.950 2.471Ud11 0.1149 0.2730 1.8103 0.23925 20.58 2.364 1.280 0.962 2.496Ud12 0.1140 0.2740 1.6961 0.23372 20.74 2.364 1.289 0.976 2.526Ud13 0.1132 0.2750 1.5826 0.22785 20.90 2.366 1.298 0.990 2.555Ud14 0.1124 0.2760 1.4608 0.22121 21.07 2.368 1.307 1.005 2.588Ud15 0.1113 0.2771 1.3117 0.21259 21.29 2.369 1.320 1.025 2.630
7.3 Effects of the compactness
7.3.1 Threshold of the m=2 instabilityTo reconstruct the dependence on β of the frequencies and the growth times of the m = 2barmode instability in the region near the threshold we used the extrapolation techniquealready described in [51]. That technique is bases on an ansatz made in analogy withthe classical Newtonian study of the barmode instability on Maclaurin spheroids for anincompressible and self-gravitating Newtonian fluid in equilibrium [2]. In this classicalscenario the eigenfrequency of the m=2-mode
σ = Ω(β)± i√τ 2(β)
(7.11)
can be represented by means of two real differentiable functions of β: Ω and 1/τ 2. Themode becomes unstable when the function 1/τ 2 changes sign, at the threshold for the devel-opment of the instability, and its square root goes from imaginary to real. In our notation,above the threshold, Ω/4π and τ represent the pattern speed and the growth time of the

7.3.1 Threshold of the m=2 instability 55
Table 7.5: Least-square fit of the value of β at the threshold for the development of thebarmode instability for the four series of models reported in 7.8. The critical value forthe onset of the instability βc is the value of β for 1/τ 2 = 0 (τ is measured in ms). Thegraphical representation of the fits is shown in 7.3.
1M β = 0.2598(8) +0.0379(19) (1/τ 2)1.5M β = 0.2558(5) +0.0236(8) (1/τ 2)
2M β = 0.2528(15) +0.0161(13) (1/τ 2)2.5M β = 0.2494(14) +0.0116(8) (1/τ 2)
unstable barmode deformation of the star, respectively. The main assumption we made isthat the two function Ω and 1/τ 2 are regular also in full General Relativity and that it ispossible to parametrize them, with good accuracy, in the neighborhood of the thresholdusing just five parameters: fc,f
(1)c ,f (2)
c ,k,βc:
Ω(β)
2π≈ fc + f (1)
c ((β − βc)/βc) + f (2)c ((β − βc)/βc)
2 , (7.12)
1
τ 2≈ 1
k2(β − βc) . (7.13)
We found that this expectation is fulfilled and the five parameters can be determined byfitting the pattern speeds and the growth times obtained in the largely overcritical models.For these models the developement of the m = 2 barmode deformation is very rapid, theextraction of the instability parameter is robust and can be safely simulated at a lowerresolution and in a shorter evolution time than models that are close to the threshold for theonset of the instability [51].
We simulated four series of initial models characterized by a constant conserved bary-onic mass. For the extrapolation we used, as [51], a grid resolution of ∆x/M = 0.625and we imposed the symmetries bitant (z → −z) and π-symmetry (180o rotation aroundthe z-axis) in order to reduce the size of the computational domain of a factor 4. We havecomputed the values for f
Band τ
Bby means of a nonlinear least-square fit to the trial form
of 7.7. Making use of these results, which are collected in 7.8, we have then again used aleast-square fit of the values f
Band τ
Bto the expected β dependence of equations (7.12)
and (7.13) to obtain the unknown coefficients fc, f(1)c , f
(2)c , k and βc. The results of these
fits are reported in 7.5 and 7.6.Once obtained βc for the four different series of models, it is possible to notice (see
7.3) that, with a good approximation in the analysed range of compactness, it has a lineardependence on the conserved baryonic mass M0 and so that it is possible to extrapolate itsNewtonian value:
βc(M0) = 0.266(1)− 0.0070(3) M0/M. (7.14)
The extrapolation of the value of βc for zero conserved baryonic mass is in very good agree-ment with the value of βc obtained in [15] in the Newtonian approximation by means of alinear stability analysis for a sequence of equilibrium models with the the same polytropic

7.3.1 Threshold of the m=2 instability 56
Table 7.6: Least-square fit of the value of the frequency fB (in Hz) of the barmode (7.7) atthe threshold for the onset of the barmode instability as a function of θ ≡ (β − βc)/βc forthe four series of models at constant baryonic mass. The value of the frequency fB at thethreshold is the value for θ = 0.
1M fB = 384(7) −82(256)θ −5979(2288)θ2
1.5M fB = 551(8) −393(277)θ −6138(2261)θ2
2M fB = 738(32) −728(1096)θ −6300(8282)θ2
2.5M fB = 991(10) −1030(283)θ −8719(1844)θ2
index and degree of differential rotation that we used in this work. This agreement repre-sents a very good confirmation of the accuracy of our extrapolation method in determiningthe position of the threshold. Our results represent the first quantitative determination of thedependence of the critical β on the compactness of the star for the selected profile of dif-ferential rotation and EOS. A previous work on this subject [21] used the post-Newtonianapproximation and strong ad-hoc initial m=2 perturbations with δ2=0.1 to study the effectsof General Relativity on the barmode instability. In this way it was possible to obtain a firstqualitative evidence that threshold is smaller for higher compactness.
The reconstructed dependence on the compactness of the threshold is reported for com-pleteness on the (M/R, β) plain of 7.1. The band in 7.1 represents the estimated error onthe position of the threshold obtained by our standard least-square fitting procedures. Itis worth noticing that our precise determination of the threshold without the use of initialm=2 perturbations is interesting also for characterizing the dynamics of slightly supercrit-ical models,f ro which it will allow direct comparisons with perturbative studies - if theywill be developed - highlighting when the latter cease to be accurate and how they can beimproved.
In the last part of this subsection we give some details on the figures and the tablesrelated the m=2 instability and the way we computed the quantities there reported.
In 7.2 we give a graphical representation of the obtained values for the frequency andthe growth times of the m=2 deformations of our models with their error bars. In particularwe denote with bare error bars the umperturbed unstable models reported in 7.8 and usedfor the fits; with triangles we denote the unperturbed models of 7.8, not used for the fitsbecause of the big error in determining their evolution parameters; with squares we denotethe stable perturbed models of 7.7 and with open circles the models dominated by them = 3 instability in the same table. It is worth noticing that for these last models thefrequency of the m = 2 mode is completely altered by the growing m = 3 deformation,which rapidly dominates the small m=2 perturbation we imposed in the initial conditionsof the simulation.
In addition, the continuous lines represent the two fitted curves for Ω(β) and τ(β),while the dotted lines refer to the corresponding extrapolations below the threshold. Wenote that the error bars in 7.8 are computed in different ways for the growth rates and thefrequencies. In the first case they are computed as the difference between the minimum andmaximum values of d log(I(t))/dt in the time intervals where the quadrupole is between

7.3.2 Persistence 57
the 5% and the 35% of its maximum amplitude. In the second case, instead, the errorbars are determined using the minimum and maximum values over the same interval of thepattern speeds extracted from the collective phase φQ(t) of ??.
The frequencies and the error bars for the stable models reported in 7.7 and 7.2 are in-stead computed using the Lomb’s power spectrum analysis [40]. We reported the frequencyagt which the modulus of the Fourier transform of the imaginary part of the collective modePm(t) of 7.10 is at its maximum value and the interval of frequencies where the amplitudeof the modulus is above one half of its maximum value.
7.3.2 PersistenceWhether the compactness affects the persistence of the barmode deformations is an openquestion. To obtain a clear answer we decided to extend the simulation time of someselected models with M0 > 1.5M. In 7.4 we summarize the result we obtained. In par-ticular we found that at higher compactness the saturation stage (see [51] for a definition)is suppressed: the m = 2 deformation decreases immediatly after it reaches its maximumamplitude. In [51] we found for slightly supercritical models with M0 = 1.5M a short butclear stage of the evolution of the barmode where the amplitude of the m=2 deformationcan oscillate near its maximum value. That stage ends because of the mode-coupling. Forour models at M0 = 2.5M istead, the m = 1 deformation plays a minor role in dumpingthe m = 2 deformation. To clarify this point some comments on 7.4 are necessary. In theleft panel, referring to the m=2 deformation, we report the evolution of the quadrupole forsome selected models which span the studied interval of β’s: for the high supercritical mod-els we evolved the initial condition imposing π-symmetry and for the two models closerto the threshold we report the evolution without imposing π-symmetry. To understand ourchoice remember that mode coupling plays a role only near the threshold [51]. In the rightpanel instead, we report the evolution of the distortion parameter imposing π-symmetryfor two model with different masses, but a similar distance from the threshold. The π-symmetry excludes the the effect of mode coupling so the different behaviour of the twobarmodes can be attribuited to the different compactness. The model with M0 = 1.5M,as expected [51], has a saturation stage; in the model with M0 = 2.5M instead, the am-plitude decrease rapidly in spite of the imposed artificial symmetry. A small effect of them = 1 deformation can be seen anyway, by comparing the evolution of model Ud2 with(7.4: right panel) and without (7.4: left panel) π-symmetry. Without π-symmetry, the smallsecond maximum of the amplitude of the barmode deformation is suppressed and a slightlym=1-deformed star is the final outcome of the evolution.
It is interesting to note that J/M2 increases with the compactness. With the selectedprofile of rotation and EOS, at higher compactness it is possible to obtain unstable initialmodels with the parameter J/M2 near one. This parameter could play a role in understand-ing the different behaviours at different compactness.
7.3.3 Unstable deformation with m > 2
Studying the region of βs near the threshold for the developement of the barmode instabilityfor stars at M0 >= 2M we found in our stellar models the developement of dynamical

7.3.3 Unstable deformation with m > 2 58
Table 7.7: Frequency fB
of the barmode deformation and the frequency f3 growth time τ3
of the m=3 deformation for model below the threshold for the onset of the m=2 barmodeinstability. Are also reported: the name of the simulation; the ratio β of the rotationalkinetic energy to the gravitational binding energy; the grid resolution used; the amount δ2
(if any) of the initial m=2-mode perturbation. All the values reported here refers to modelsthat are evolved without imposing the π-symmetry condition.
Model β ∆x/M δ2 fB
f3 τ3
(Hz) (Hz) (ms)Sb6 0.240 0.5 0.04 736+46
−46 * *Sb5 0.245 0.5 0.04 694+48
−50 * *Sb4 0.250 0.5 0.04 636+50
−54 * *Sb3 0.252 0.5 0.04 604+56
−56 * *Sb2 0.253 0.5 0.04 588+56
−56 * *Sb1 0.254 0.5 0.04 576+58
−56 * *Ub1 0.255 0.5 0.04 564+60
−58 * *Sb1 0.254 0.5 0.0 606+8
−21 1302−12+12 3.8
Ub1 0.255 0.5 0.0 586+14−12 1284−12
+16 10.0Sd6 0.235 0.625 0.01 1400+44
−24 2454+52−58 2.7
Sd5 0.240 0.625 0.01 1304+62−58 2312+122
−100 1.4Sd4 0.245 0.625 0.01 1262+30
−26 2248+66−76 2.9
Sd3 0.247 0.625 0.01 1098+26−20 2200+62
−54 2.5Sd1 0.249 0.625 0.01 1048+32
−30 2136+74−50 3.5
Sd6 0.235 0.625 0.0 ? 2474+18−20 2.7
Sd5 0.240 0.625 0.0 ? 2372+20−18 2.7
Sd4 0.245 0.625 0.0 ? 2296+16−16 2.2
Sd2 0.248 0.625 0.0 ? 2228+22−20 2.5
Sd1 0.249 0.625 0.0 1446+32−26 2174+28
−28 2.2Ud1 0.251 0.625 0.0 1022+32
−56 2158+12−16 2.9
Sc1 0.248 0.625 0.0 ? 1746+12−14 4.0
∗ Dynamical m=3 deformation instability can not be detected.? The frequency of the m=2 barmode can not be measured.

7.3.3 Unstable deformation with m > 2 59
instabilities with m=3 without introducing any ad-hoc perturbation in the initial condition.In 7.5 we report in the left panel the matter isodensity lines in the equatorial plane, and inthe right panel the evolution of the global modes [7.10] for model Sd4. The m=3 unstabledeformation is the fastest growing one. That is the first time that similar instabilities areseen in stellar models with stiff EOS and a moderate degree of differential rotation. It isimportant to note that in the full General Relativity contest the parameters β and A are notthe only parameters that can determine which is the fastest growing unstable deformation.
In a recent Newtonian work [52], a developement of azimuthal deformations with m >2 were found also for stellar models with low β and and a stronger differential rotation.In that work models with an initial m = 2 perturbation were studied and this could alterthe global dynamics of the models, because of the competing unstable deformation [51],and could make less clear what is the effect of a pure instability and what is the effect ofmode-coupling. In any case it is interesting to notice that in all the showed simulationsthe m = 1 deformation becomes the dominant one in the final stages of the evolution.This supports the idea that the dumping of the m > 1 deformations in a dynamical timescale could be a general property of the dynamical instabilities, not confined to the highβ region, at least in the typical scenario studied in the literature. The first attempts ofinterpretation of these m 6= 2 instabilities were made in [52, 53, 54], but further workwill be needed to completely clarify the role of β, of the differential rotation, of the EOSand of the compactness in determining the growth times, the maximum amplitudes and thepersistences of these unstable deformation.
Our results on the frequencies and the growth times of the m = 3 instability are col-lected in 7.7. The frequency of the m = 3 instability is obtained using the Lomb powerspectrum analysis [40] of the imaginary part of the collective phase P3(t) of 7.10. To givean estimation of the errors we reported the interval of frequencies where the amplitude ofthe modulus of the Fourier transform of the same quantity is above one half of its maxi-mum value. The growth times of the m = 3 instability, also reported in 7.7, are estimatedby fitting the modulus of the collective modes P3 of 7.10.

7.3.3 Unstable deformation with m > 2 60
0.24 0.26 0.280
200
400
600
800
1000
1200
1400
Figure 7.2: Critical diagram as constructed with the frequencies and growth times relativeto the unperturbed models of 7.8 (error bars only). The continuous lines represent the twofitted curves for Ω(β) and τ(β), while the dotted lines the corresponding extrapolationsbelow the threshold. We report also the unperturbed models of 7.8 not used for the fit(triangles), the perturbed models of 7.7 (squares) and the models dominated by the m = 3deformation (open circles).

7.3.3 Unstable deformation with m > 2 61
Figure 7.3: Left panel: Extrapolation of the critical value of the parameter βc for the onsetof the m=2 instability from the least-square fit of β vs. 1/τ 2 for the four series of models atconstant baryonic mass reported in 7.8. The numerical results of these four fits are reportedin 7.5. Right panel: Linear extrapolation of the critical β to the limit of zero rest mass.
Figure 7.4: Left panel: Evolution of the quadrupole modulus (7.8) in some selected m=2-unstable models of the sequence with M0 = 2.5M reported in 7.8. In this case modelsUd15, Ud10, Ud4 are evolved imposing π-symmetry, models Ud1 and Ud2 without impos-ing π-symmetry. Right panel: Comparison of the evolutions of the distortion parameters η(??) for the two m=2-unstable models Ub4 and Ud2 evolved imposing π-symmetry. Theyhave a similar distance from the threshold for the development of the m=2 instability buthave different masses: 1.5M (dotted line) and 2.5M (dot-dashed line). More compactstars have less persistent deformations also without odd and even modes coupling.

7.3.3 Unstable deformation with m > 2 62
Table 7.8: Growth rate τB
and frequency fB
of the barmode instability. The models areevolved using grid resolution ∆x/M = 0.625 with no perturbation in the initial state.In all the models except model Ub1 and Ud1 were imposed the π-symmetry. The valuesτ
Band f
Bhave been determined by a least-square fit of 7.7 using the xy component of
the quadrupole (Ixy(t)) in the time interval where it is between the 5% and the 35% of itsmaximum value.
Model β τB
fB
Model β τB
fB
(ms) (Hz) (ms) (Hz)Ua1 0.2671 2.235+0.16
−0.09 377+7−4 Uc1 0.2596 1.564+0.07
−0.17 717+10−6
Ua2 0.2690 2.019+0.14−0.13 373+3
−1 Uc2 0.2631 1.277+0.07−0.12 694+18
−6
Ua3 0.2711 1.838+0.11−0.14 368+4
−3 Uc3 0.2670 1.055+0.08−0.10 679+7
−7
Ua4 0.2730 1.702+0.10−0.06 364+1
−3 Uc4 0.2716 0.915+0.08−0.02 650+2
−5
Ua5 0.2750 1.600+0.10−0.06 359+2
−4 Uc5 0.2761 0.829+0.07−0.02 621+1
−8
Ua6 0.2771 1.482+0.11−0.02 352+1
−4 Uc6 0.2790 0.795+0.06−0.03 593+4
−6
Ua7 0.2790 1.405+0.11−0.04 345+4
−2 Ud1 0.2510 ≈ 4.2 1009+48−96
Ua8 0.2814 1.313+0.10−0.04 335+2
−2 Ud2 0.2580 1.193+0.25−0.11 945+24
−14
Ub1 0.2551 ? 586+14−12 Ud3 0.2631 0.938+0.05
−0.02 907+6−6
Ub2 0.2581 3.215+2.62−0.61 552+40
−11 Ud4 0.2650 0.846+0.06−0.03 891+4
−4
Ub3 0.2595 2.758+1.32−1.17 544+37
−17 Ud5 0.2666 0.800+0.07−0.05 881+5
−7
Ub4 0.2621 1.920+0.17−0.25 540+3
−5 Ud6 0.2675 0.813+0.05−0.06 871+13
−6
Ub5 0.2631 1.803+0.07−0.15 535+4
−3 Ud7 0.2680 0.774+0.07−0.03 865+7
−4
Ub6 0.2651 1.591+0.08−0.04 527+4
−2 Ud8 0.2701 0.735+0.05−0.05 847+7
−13
Ub7 0.2671 1.441+0.10−0.09 520+4
−1 Ud9 0.2710 0.724+0.05−0.02 832+6
−3
Ub8 0.2686 1.335+0.10−0.03 516+2
−3 Ud10 0.2721 0.716+0.05−0.02 826+2
−7
Ub9 0.2701 1.290+0.07−0.05 509+5
−3 Ud11 0.2730 0.697+0.06−0.02 816+3
−9
Ub10 0.2721 1.214+0.08−0.05 502+3
−4 Ud12 0.2741 0.690+0.05−0.03 804+1
−6
Ub11 0.2743 1.126+0.09−0.02 492+2
−5 Ud13 0.2750 0.679+0.05−0.02 793+4
−11
Ub12 0.2761 1.087+0.08−0.03 483+4
−3 Ud14 0.2760 0.660+0.06−0.01 782+1
−8
Ub13 0.2812 0.959+0.10−0.01 450+4
−3 Ud15 0.2771 0.654+0.05−0.02 767+2
−8? The grow rate of the m=2 barmode can not reliably measured for this model.

7.3.3 Unstable deformation with m > 2 63
Figure 7.5: Left panel: Matter isodensity lines for the simulation Sd4 with β = 0.245 andM0 = 2.5M. Starting from the center the continuos lines represent respectively: the 80%,70%, 60% and 50% of the maximum density. Dotted lines are 1/2n times the maximumdensity, with n > 1. The snapshot was taken at t=20.8 ms. Rigth panel: Evolution of theglobal modes (7.10) for the same simulation. The vertical line is exactly at t=20.8 ms.

7.3.3 Unstable deformation with m > 2 64

Chapter 8
Conclusions
We have presented accurate simulations of the dynamical barmode instability in full Gen-eral Relativity. An important motivation behind this work is the need to go beyond thestandard phenomenological discussion of the instability and to find answers to importantopen questions about its nonlinear dynamics. Among such open problems there are, forinstance, the determination of the role of the initial perturbation or of the symmetry con-ditions, or the influence on the dynamics of the value of the parameter β, or, most impor-tantly, the determination of the timescale of the persistence of the bar deformation once thisis fully developed. Clearly, this latter question is a very pressing one in gravitational-waveastronomy, as it bears important consequences on the detectability of the whole process.
In order to provide answers to these questions we have explored the onset and develop-ment of the instability for a large number of initial stellar models. These have been calcu-lated as stationary equilibrium solutions for axisymmetric and rapidly rotating relativisticstars in polar coordinates. More specifically, the evolved models represent relativistic poly-tropes with adiabatic index Γ = 2 and are members of a sequence having a constant amountof differential rotation with A = 1 and a constant rest mass of M0 ' 1.51 M.
The simulations have been carried out with the general-relativistic hydrodynamics codeWhisky, in which the hydrodynamics equations are written as finite differences on a Carte-sian grid and solved using HSRC schemes [24, 25]. The Einstein, equations, on the otherhand, have been solved within the conformal traceless formulation implemented within theCactus computational toolkit [29].
The main results of our analysis can be summarised as follows: i) An initial m=1 orm=2-mode perturbation can play a role in determining the duration of the barmode defor-mation, but not the growth time of the instability; ii) For moderately overcritical models theuse of a π-symmetry can radically change the dynamics and extend considerably the per-sistence of the bar; this ceases to be true for largely overcritical models; iii) The persistenceof the bar is strongly dependent on the degree of overcriticality and is generically of theorder of the dynamical timescale; iv) Generic nonlinear mode-coupling effects (especiallybetween the m=1 and the m=2 mode) appear during the development of the instability andthese can severely limit the persistence of the bar deformation and eventually suppress thebar deformation; v) The dynamics of largely overcritical models (i.e. with β βc), arefully determined by the excess of rotational energy and the bar deformation is very rapidlysuppressed through the conversion of kinetic energy into internal one. Interestingly, a sim-
65

CHAPTER 8. Conclusions 66
ilar dynamics for the odd and even modes has been observed also in the case of the low-βinstability in recent Newtonian simulations [?]. In this case, however, the growth rate ofthe m=1-mode is much smaller and hence the persistence of the bar longer.
Finally, we have considered whether the classical Newtonian stability analysis of Maclau-rin spheroids for incompressible self-gravitating fluids is accurate also for differentiallyrotating and relativistic stars. Overall, we have found the perturbative predictions to besurprisingly accurate in determining the threshold for the instability as well as the complexeigenfrequencies for the unstable models.
While the features of the barmode instability discussed here are expected to be rathergeneric, they have been deduced from the analysis of a small region of the space of param-eters. Work is now in progress to extend the present analysis by considering stellar modelswith different and larger compactnesses and that are regulated by more realistic EOSs.

Bibliography
[1] M. Shibata, T. W. Baumgarte, and S. L. Shapiro, “The bar-mode instability indifferentially rotating neutron stars: Simulations in full general relativity,” Astrophys.J. 542 (2000) 453–463, astro-ph/0005378.
[2] S. Chandrasekhar, Ellipsoidal Figures of Equilibrium. Yale Univ. Press, New Haven,1969.
[3] S. L. Shapiro and S. A. Teukolsky, Black Holes, White Dwarfs, and Neutron Stars.John Wiley & Sons, New York, 1983.
[4] J. E. Tohline, R. H. Durisen, and M. McCollough, “The linear and nonlineardynamic stability of rotating N = 3/2 polytropes,” APJ 298 (1985) 220–234.
[5] R. H. Durisen, R. A. Gingold, J. E. Tohline, and A. P. Boss, “Dynamic fissioninstabilities in rapidly rotating N = 3/2 polytropes - A comparison of results fromfinite-difference and smoothed particle hydrodynamics codes,” APJ 305 (1986)281–308.
[6] J. D. Brown, “Gravitational waves from the dynamical bar instability in a rapidlyrotating star,” Phys. Rev. D62 (2000) 084024.
[7] J. L. Houser, J. M. Centrella, and S. C. Smith, “Gravitational radiation fromnonaxisymmetric instability in a rotating star,” Phys. Rev. Lett. 72 (1994) 1314–1317.
[8] J. L. Houser and J. M. Centrella, “Gravitational radiation from rotational instabilitesin compact stellar cores with stiff equations of state,” Phys. Rev. 54 (1996), no. 206,7278–7297.
[9] S. C. Smith, J. L. Houser, and J. M. Centrella, “Simulations of NonaxisymmetricInstability in a Rotating Star: A Comparison between Eulerian and Smooth ParticleHydrodynamics,” APJ 458 (1996) 236.
[10] K. C. B. New, J. M. Centrella, and J. E. Tohline, “Gravitational waves fromlong-duration simulations of the dynamical bar instability,” Phy. Rev. D62 (2000)064019.
[11] K. C. B. New and S. L. Shapiro, “Evolution of Differentially Rotating SupermassiveStars to the Onset of Bar Instability,” APJ 548 (2001) 439–446.
67

BIBLIOGRAPHY 68
[12] Y. T. Liu, “Dynamical instability of new-born neutron stars as sources ofgravitational radiation,” Phys. Rev. D65 (2002), no. 12, 124003.
[13] B. K. Pickett, R. H. Durisen, and G. A. Davis, “The Dynamic Stability of RotatingProtostars and Protostellar Disks. I. The Effects of the Angular MomentumDistribution,” APJ 458 (1996) 714.
[14] J. E. Tohline and I. Hachisu, “The breakup of self-gravitating rings, tori, and thickaccretion disks,” APJ 361 (1990) 394–407.
[15] S. Karino and Y. Eriguchi, “Linear Stability Analysis of Differentially RotatingPolytropes: New Results for the m=2 f-Mode Dynamical Instability,” APJ 592(2003), no. 2, 1119–1123.
[16] M. Shibata, S. Karino, and Y. Eriguchi, “Dynamical instability of differentiallyrotating stars,” Mon. Not. R. Astron. Soc. 334 (2002) L27–L31.
[17] M. Shibata, S. Karino, and Y. Eriguchi, “Dynamical bar-mode instability ofdifferentially rotating stars: effects of equations of state and velocity profiles,” Mon.Not. R. Astron. Soc. 342 (2003) 619–626.
[18] M. Saijo, T. W. Baumgarte, and S. Shapiro, “One-Armed Spiral Instability inDifferentially Rotating Stars,” Astrophys. J. 595 (2003) 352–364.
[19] C. D. Ott, S. Ou, J. E. Tohline, and A. Burrows, “One-armed Spiral Instability in aLow T/—W— Postbounce Supernova Core,” Astrophys. J. 625 (2005) L119–L122.
[20] M. Saijo, M. Shibata, T. W. Baumgarte, and S. L. Shapiro, “Dynamical BarInstability in Relativistic Rotating Stars,” in 20th Texas Symposium on relativisticastrophysics, J. C. Wheeler and H. Martel, eds., vol. 586 of AIP Conf. Proc., p. 766.2001.
[21] M. Saijo, M. Shibata, T. W. Baumgarte, and S. L. Shapiro, “Dynamical BarInstability in Rotating Stars: Effect of General Relativity,” Astrophys. J. 548 (2001)919–931.
[22] M. Shibata and Y.-i. Sekiguchi, “Three-dimensional simulations of stellar corecollapse in full general relativity: Nonaxisymmetric dynamical instabilities,” PhysRev. D71 (2005) 024014.
[23] M. Saijo, “Dynamical bar instability in a relativistic rotational core collapse,” Phys.Rev. D71 (2005), no. 10, 104038.
[24] L. Baiotti, I. Hawke, P. Montero, and L. Rezzolla, “A new three-dimensionalgeneral-relativistic hydrodynamics code,” in Computational Astrophysics in Italy:Methods and Tools, R. Capuzzo-Dolcetta, ed., vol. 1, p. 327. Mem. Soc. Astron. It.Suppl., Trieste, 2003.

BIBLIOGRAPHY 69
[25] L. Baiotti, I. Hawke, P. J. Montero, F. Loffler, L. Rezzolla, N. Stergioulas, J. A. Font,and E. Seidel, “Three-dimensional relativistic simulations of rotating neutron starcollapse to a Kerr black hole,” Phys. Rev. D71 (2005) 024035.
[26] R. D. Richtmyer and K. Morton, Difference Methods for Initial Value Problems.Interscience Publishers, New York, 1967.
[27] J. W. York, Jr., “Kinematics and Dynamics of General Relativity,” in Sources ofGravitational Radiation, L. L. Smarr, ed., p. 83. Cambridge University Press,Cambridge, UK, 1979.
[28] T. Nakamura, K. Oohara, and Y. Kojima Prog. Theor. Phys. Suppl. 90 (1987) 1.
[29] “www.cactuscode.org.”
[30] C. Bona, J. Masso, E. Seidel, and J. Stela, “New Formalism for NumericalRelativity,” Phys. Rev. Lett. 75 (1995) 600–603.
[31] M. Alcubierre, “The appearance of coordinate shocks in hyperbolic formulations ofGeneral Relativity,” Phys. Rev. D55 (1997) 5981–5991.
[32] M. Alcubierre and J. Masso, “Pathologies of hyperbolic gauges in general relativityand other field theories,” Phys. Rev. D57 (1998), no. 8, 4511–4515.
[33] M. Alcubierre, B. Brugmann, D. Pollney, E. Seidel, and R. Takahashi, “Black holeexcision for dynamic black holes,” Phys. Rev. D64 (2001) 61501 (R).
[34] L. Smarr and J. York, “Kinematical conditions in the construction of spacetime,”Phys. Rev. D17 (1978) 2529.
[35] J. A. Font, “Numerical hydrodynamics in general relativity,” Living Rev. Relativity 6(2003) 4.
[36] N. Stergioulas and J. L. Friedman, “Comparing Models of Rapidly RotatingRelativistic Stars Constructed by Two Numerical Methods,” Astrophys. J. 444(1995) 306.
[37] N. Stergioulas, T. A. Apostolatos, and J. A. Font, “Non-linear pulsations indifferentially rotating neutron stars: mass-shedding-induced damping and splitting ofthe fundamental mode,” Mon. Not. R. Astron. Soc. 352 (2004) 1089–1101.
[38] H. Dimmelmeier, N. Stergioulas, and J. A. Font, “Non-linear axisymmetricpulsations of rotating relativistic stars in the conformal flatness approximation,”Mon. Not. R. Astron. Soc. 368 (2006) 1609.
[39] J. A. Font, T. Goodale, S. Iyer, M. Miller, L. Rezzolla, E. Seidel, N. Stergioulas,W. M. Suen, and M. Tobias, “Three-dimensional general relativistic hydrodynamics.II. Long-ter m dynamics of single relativistic stars,” Phys. Rev. D65 (2002) 084024.

BIBLIOGRAPHY 70
[40] N. R. Lomb, “Least-squares frequency analysis of unequally spaced data,” Astr.Space Sci. 39 (1976) 447–462.
[41] M. Bonaldi, M. Cerdonio, L. Conti, M. Pinard, G. Prodi, L. Taffarello, and J. ZendriPhys. Rev. D68 (2003) 102004.
[42] A. M. Abrahams, L. Rezzolla, M. E. Rupright, A. Anderson, P. Anninos, T. W.Baumgarte, N. T. Bishop, S. R. Brandt, J. C. Browne, K. Camarda, M. W. Choptuik,G. B. Cook, R. R. Correll, C. R. Evans, L. S. Finn, G. C. Fox, R. Gomez, T. Haupt,M. F. Huq, L. E. Kidder, S. A. Klasky, P. Laguna, W. Landry, L. Lehner, J. Lenaghan,R. L. Marsa, J. Masso, R. A. Matzner, S. Mitra, P. Papadopoulos, M. Parashar,F. Saied, P. E. Saylor, M. A. Scheel, E. Seidel, S. L. Shapiro, D. Shoemaker,L. Smarr, B. Szilagyi, S. A. Teukolsky, M. H. P. M. van Putten, P. Walker,J. Winicour, and J. W. Y. Jr, “Gravitational wave extraction and outer boundaryconditions by perturbative matching,” Phys. Rev. Lett. 80 (1998) 1812–1815.
[43] M. E. Rupright, A. M. Abrahams, and L. Rezzolla, “Cauchy-perturbative matchingand outer boundary conditions I: Methods and tests,” Phys. Rev. D58 (1998) 044005.
[44] L. Rezzolla, A. M. Abrahams, R. A. Matzner, M. Rupright, and S. Shapiro,“Cauchy-perturbative matching and outer boundary conditions: computationalstudies,” Phys. Rev. D59 (1999) 064001.
[45] C. W. Misner, K. S. Thorne, and J. A. Wheeler, Gravitation. W. H. Freeman, SanFrancisco, 1973.
[46] T. Tanaka, M. Shibata, M. Sasaki, H. Tagoshi, and T. Nakamura, “GravitationalWave Induced by a Particle Orbiting around a Schwarzschild Black Hole,” Prog.Theor. Phys. 90 (1993) 65.
[47] A. Nagar, J. A. Font, O. Zanotti, and R. De Pietri, “Gravitational waves fromoscillating accretion tori: Comparison between different approaches,” Phys. Rev.D72 (2005) 024007.
[48] M. Shibata and Y. Sekiguchi, “Gravitational waves from axisymmetric oscillatingneutron stars in general relativistic simulation,” Phys. Rev. D68 (2003) 104020.
[49] K. D. Kokkotas and N. Stergioulas, “Gravitational Waves from Compact Sources,”in Proceedings of the 5th International Workshop ”New Worlds in AstroparticlePhysics”. 2005.
[50] V. Kalogera et al., “The Cosmic Coalescence Rates for Double Neutron StarBinaries,” Astrophys. J. 601 (2004) L179–L182.
[51] L. Baiotti, R. De Pietri, G. M. Manca, and L. Rezzolla, “Accurate simulations of thedynamical barmode instability in full General Relativity,” astro-ph/0609473.
[52] S. Ou and J. E. Tohline, “Unexpected Dynamical Instabilities in DifferentiallyRotating Neutron Stars,” APJ 651 (Nov., 2006) 1068–1078, astro-ph/0604099.

BIBLIOGRAPHY 71
[53] A. L. Watts, N. Andersson, and D. I. Jones, “The nature of low T/—W— dynamicalinstabilities in differentially rotating stars,” Astrophys. J. 618 (2005) L37,astro-ph/0309554.
[54] M. Saijo and S. Yoshida, “Low T/—W— dynamical instability in differentiallyrotating stars: diagnosis with canonical angular momentum,” Mon. Not. Roy. Astron.Soc. 368 (May, 2006) 1429–1442.