it2gy1 - vili.pmmf.huvili.pmmf.hu/~fuzi/Iranyitastechnika2/it2gy1.pdf · Az id ıállandó nem...
10
1. Gyakorlat: Egytárolós rendszerek modellje és szabályozásuk jellemzése a) Hevítési folyamat modellezése idıtartományban Egy m [kg] tömegő, c [J/kgK] fajhıvel és h [W/K] felületi hıátadási együtthatóval rendelkezı tárgyat állandó ϑ k [K] hımérséklető környezetben ϑ 0 [K] kezdeti hımérsékletrıl hevítünk állandó P [W] teljesítménnyel. A folyamatot leíró differenciál-egyenlet: ( 29 k h P t mc ϑ ϑ ϑ - - = d d , és a kezdeti feltétel: ( 0 0 ϑ ϑ = . Rendezve: mc h P mc h t k ϑ ϑ ϑ + = + d d A megoldás a homogén (gerjesztés nélküli) egyenlet általános megoldásából és az inhomogén egyenlet egy sajátos megoldásából tevıdik össze: ( ( ( t t t i h ϑ ϑ ϑ + = A homogén egyenlet: 0 d d = + ϑ ϑ mc h t általános megoldása: (29 ℜ ∈ = + - = - = - C Ce t K t mc h t mc h t mc h h ; ln d d ϑ ϑ ϑ ϑ Az inhomogén egyenlet egy megoldását úgy határozzuk meg, hogy a homogén egyenlet tetszıleges együtthatóját idıfüggınek tekintjük: (29 (29 t mc h i e t C t - = ϑ majd behelyettesítjük az inhomogén egyenletbe: (29 t mc h k t mc h k k t mc h t mc h t mc h e h P t e mc h P t C mc h P Ce mc h Ce mc h e t C + = + = + = + - ∫ - - - ϑ ϑ ϑ d d d
Transcript of it2gy1 - vili.pmmf.huvili.pmmf.hu/~fuzi/Iranyitastechnika2/it2gy1.pdf · Az id ıállandó nem...

1. Gyakorlat: Egytárolós rendszerek modellje és szabályozásuk jellemzése a) Hevítési folyamat modellezése idıtartományban Egy m [kg] tömegő, c [J/kgK] fajhıvel és h [W/K] felületi hıátadási együtthatóval rendelkezı tárgyat állandó ϑk [K] hımérséklető környezetben ϑ0 [K] kezdeti hımérsékletrıl hevítünk állandó P [W] teljesítménnyel. A folyamatot leíró differenciál-egyenlet:
( )khPt
mc ϑϑϑ −−=d
d ,
és a kezdeti feltétel:
( ) 00 ϑϑ = .
Rendezve:
mc
hP
mc
h
tkϑϑϑ +
=+d
d
A megoldás a homogén (gerjesztés nélküli) egyenlet általános megoldásából és az inhomogén egyenlet egy sajátos megoldásából tevıdik össze:
( ) ( ) ( )ttt ih ϑϑϑ +=
A homogén egyenlet:
0d
d =+ ϑϑmc
h
t
általános megoldása:
( ) ℜ∈=
+−=
−=
−CCet
Ktmc
h
tmc
h
tmc
h
h ;
ln
dd
ϑ
ϑ
ϑϑ
Az inhomogén egyenlet egy megoldását úgy határozzuk meg, hogy a homogén egyenlet tetszıleges együtthatóját idıfüggınek tekintjük:
( ) ( ) tmc
h
i etCt−
=ϑ
majd behelyettesítjük az inhomogén egyenletbe:
( ) tmc
h
k
tmc
hk
kt
mc
ht
mc
ht
mc
h
eh
Pte
mc
hPtC
mc
hPCe
mc
hCe
mc
he
t
C
+=+
=
+=+−
∫
−−−
ϑϑ
ϑ
d
d
d

Az inhomogén egyenlet megoldása:
( ) ki h
Pt ϑϑ += .
A differenciálegyenlet megoldása:
( ) ℜ∈++=−
Ch
PCet k
tmc
h
;ϑϑ .
A kezdıérték-feltételbıl azonosítható az együttható:
( ) kk h
PC
h
PC ϑϑϑϑϑ −−=⇒=++= 000 .
A differenciálegyenlet és kezdıérték-feltétel általános megoldása tehát:
( ) k
tmc
h
k h
Pe
h
Pt ϑϑϑϑ ++
−−=−
0
Az itt vázolt módszer alkalmazása magasabbrendő, vagy több egyenletbıl álló rendszer esetén igen bonyolulttá válik. Ezekben az esetekben a differenciálegyenleteket algebrai egyenletté alakító Laplace-transzformáció alkalmazása javallott.
A hımérséklet értéke állandósult állapotban:
( ) kt h
Pt ϑϑϑ +== ∞∞→
lim
A célfüggvény idı szerinti deriváltja:
( ) tmc
h
k eh
P
mc
ht
t
−
−+= 0d
d ϑϑϑ.
Ennek kezdeti értéke a függvény grafikus képéhez a kezdıpontban húzott érintı meredeksége:
( ) ( )000d
d ϑϑϑϑϑ −=
−+= ∞mc
h
h
P
mc
h
t k .
Ez az érintı az állandósult állapoti értéket az idıállandó abszcisszájú pontban éri el:
( )0d
d0 t
Tϑϑϑ =−∞ ,
a modellezett folyamat idıállandója tehát:
h
mcT = .
A bevezetett jelölésekkel:
( ) ( ) T
t
et−
∞∞ −+= ϑϑϑϑ 0

Az idıállandó nem függ a teljesítménytıl (gerjesztés), hanem csak a hı-tehetetlenségtıl (tömeg és fajhı szorzata), valamint a környezettel való hıcserélıdési együtthatótól (rendszer-paraméterek).
A lehőlési folyamatot ugyanaz a függvény írja le, csak ezúttal a hevítési teljesítmény nulla:
( ) ( ) k
tmc
h
k et ϑϑϑϑ +−=−
0
Ebben az esetben az állandósult állapoti érték a környezeti hımérséklettel egyenlı.
A számításokban alkalmazott egyszerősítı feltételek: • az alapjel idıben állandó (értéktartó szabályozás); • a környezet hımérséklete állandó (a környezet hı-tehetetlensége végtelen); • a környezettel kicserélt hı-teljesítmény arányos a hımérséklet-különbséggel (ez
vezetési, valamint konvektív hıáramlásnál igaz, hısugárzásra nem); • a fajlagos hıkapacitás (fajhı) értékét állandónak – a hımérséklettıl függetlennek –
tekintettük.
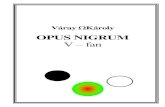
Az 1. ábra az alábbi adatokkal készült:
m = 10 kg; Számított értékek:
c = 450 J/kgK; T = 500 s;
h = 9 W/K; ϑ∞ = 1300 K;
ϑk = 300 K
ϑ0 = 400 K
P = 9000 W;
1.ábra. Hımérséklet az idı függvényében egy hevítési folyamat során

b) Hevítési folyamat modellezése Laplace-transzformáció segítségével Alkalmazzuk a Laplace-transzformációt:
( ){ } ( )st Θϑ =L
( ) 0d
d ϑΘϑ −=
sst
L
Figyelem: a kezdeti értéket tartalmazza a célfüggvény deriváltjának transzformáltja.
A differenciálegyenlet Laplace-operátor tartományban algebrai egyenletté alakul:
0ϑϑΘ ++
=
+smc
hP
mc
hs k .
Ennek megoldása:
( )
+
++
=
mc
hss
mc
hPs
s
kϑϑΘ
0
.
Elemi törtekre bontva:
( )
kk h
PB
h
PA
mc
hs
B
s
As
ϑϑϑ
Θ
−−=+=
++=
0;
.
A célfüggvény operátor-tartományban:
( )mc
hs
h
P
sh
P
skk
+
−−+
+=
ϑϑϑΘ
0
.
Visszatranszformálva idıtartományba megkapjuk a folyamatot leíró függvényt:
( ) tmc
h
kk eh
P
h
Pt
−
−−++= ϑϑϑϑ 0 .
A kezdeti érték, állandósult érték és idıállandó:
( ) ( )h
mcT
h
Pt k
t=+=== ∞∞→
;lim;0 0 ϑϑϑϑϑ
jelölések használatával:
( ) ( ) T
t
et−
∞∞ −+= ϑϑϑϑ 0

c) Hevítési folyamat irányítása állásos szabályozóval Az állásos szabályozó egy felsı hımérséklet-határ elérése esetén kikapcsolja, egy alsó határ elérésekor pedig bekapcsolja a főtıteljesítményt. A megállapított képletek érvényesek, csak az idı kezdıpontját kell mindig eltolni az aktuális szakasz kapcsolási pillanatába.
Hevítési szakaszban:
( ) maxmin ; ϑϑϑϑϑϑ ≤++
−−=−
k
tmc
h
k h
Pe
h
Pt .
Lehőlési szakaszban:
( ) ( ) minmax ; ϑϑϑϑϑϑ ≥+−=−
k
tmc
h
k et
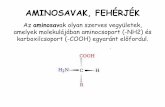
Természetesen az elsı hevítési szakasz ϑ0 hımérsékleten indul. A 2. ábra az alábbi adatokkal készült:
m = 10 kg; Számított értékek:
c = 450 J/kgK; T = 500 s;
h = 9 W/K; ϑ∞ = 1300 K;
ϑk = 350 K
ϑ0 = 400 K
ϑmin = 800 K
ϑmax = 1100 K
P = 9000 W;
2.ábra. Hımérséklet az idı függvényében egy állásos szabályozóval
irányított hevítési folyamat során

d) Hevítési folyamat irányítása arányos szabályozóval Az arányos szabályozó a hımérséklet aktuális értéke (ϑ) és az elıírt alapjel (ϑa) közötti különbséggel (hibajel) arányos hevítési teljesítményt biztosít (hőtést nem):
( ) ( )( ) ( )( )
≤>−
=t
ttAtP
a
aaP
ϑϑϑϑϑϑ
ha 0
ha ,
ahol AP az arányos erısítés. A szabályozott folyamatot leíró differenciál-egyenlet:
kaPP
mc
h
mc
A
mc
Ah
tϑϑϑϑ +=++
d
d ,
a kezdeti feltétel pedig: ( ) 00 ϑϑ = .
A differenciálegyenlet Laplace-transzformációval algebrai egyenletté alakul:
0ϑϑϑΘ ++
=
++
smc
hA
mc
Ahs kaPP .
Ennek megoldása:
( )
++
++
=
mc
Ahss
mc
hAs
sP
kaP ϑϑϑΘ
0
.
Elemi törtekre bontva:
( )P
kaP
P
kaP
P Ah
hAB
Ah
hAA
mc
Ahs
B
s
As
++
−=+
+=
++
+=ϑϑϑϑϑΘ 0;; .
Bevezetve a ( ) ( )PP
kaP
t Ah
mcT
hA
hAt
+=
++
=== ∞∞→;lim;0 0
ϑϑϑϑϑϑ jelöléseket (kezdeti érték,
állandósult érték és idıállandó), a célfüggvény alakja operátor-tartományban:
( )T
sssY
10
+
−+= ∞∞ ϑϑϑ
.
Visszatranszformálva idıtartományba megkapjuk a folyamatot leíró függvényt:
( ) ( ) T
t
et−
∞∞ −+= ϑϑϑϑ 0
Látható, hogy amennyiben az alapjel nagyobb mind a kezdıértéknél, mind a környezeti hımérsékletnél, a hevített tárgy hımérséklete mindig az alapjelnél kisebb marad, tehát a hevítési folyamat teljes idıtartamában a teljesítménynek pozitív értéke van. Az állandósult érték is kisebb az alapjelnél. Az eltérés mértéke annál kisebb, minél nagyobb az AP / h arány. Általában igaz, hogy arányos szabályozással nem lehet nulla hibajel-értéket biztosítani. Elıny viszont a strukturális stabilitás: bármekkora erısítés esetén a rendszer stabil marad.

e) Egytárolós szakasz irányítása integrál-szabályozóval Az integrál-szabályozó a szabályozott jellemzı aktuális értéke (ϑ) és az elıírt alapjel (ϑa) közötti különbség (hibajel) idıbeli integráljával arányos módosított jellemzıt (hevítési példa esetében főtési/hőtési teljesítményt) biztosít. Hevítési folyamatok esetén elıfordul, hogy a hőtés nem biztosított, csak a főtés. Ebben az esetben – lengı jelleg mellett – a feladat már nem írható le egyetlen lineáris differenciálegyenlettel, hanem az állásos szabályozással történı hevítési esethez hasonló módon a lehőlési folyamatok nulla teljesítmény mellett zajlanak.
Főtı/hőtı integrál-szabályozó a hımérséklet aktuális értéke (ϑ) és az elıírt alapjel (ϑa) közötti különbség (hibajel) idıbeli integráljával arányos hevítési teljesítményt biztosít:
( ) ( )( )∫ −=t
aIT
ktP
0
dττϑϑ ,
ahol k [W/K] az erısítés (teljesítmény-együttható), TI [s] az integrálási idıállandó. A szá-mításokban végig a k / TI [W/Ks] arány szerepel. Idıben állandó alapjellel számolva:
( ) ( )∫−=t
II
a
T
kt
T
ktP
0
dττϑϑ .
A szabályozott folyamatot leíró differenciál-egyenlet:
( ) kI
at
I mc
ht
mcT
k
mcT
k
mc
h
tϑϑττϑϑϑ +=++ ∫
0
dd
d ,
a kezdeti feltétel pedig:
( ) 00 ϑϑ = .
A differenciálegyenlet Laplace-transzformációval algebrai egyenletté alakul:
02ϑϑϑΘ ++=
++
smc
h
mcTs
k
smcT
k
mc
hs k
I
a
I
,
ahol alkalmaztuk a
( ) ( )ss
dt
Θττϑ 1
0
=
∫L
összefüggést.
Az algebrai egyenlet megoldása:
( )
++
++=
I
I
ak
mcT
k
mc
hsss
mcT
k
mc
hss
s2
02 ϑϑϑ
Θ .

Ennek a függvénynek két negatív valós pólusa van, ha a nevezıben szereplı másodfokú függvény diszkriminánsa pozitív, azaz:
2
4
h
kmcTI > vagy
mc
h
T
k
I 4
2
< .
Ebben az esetben a célfüggvény elemi törtekre bontva:
( )21 ps
C
ps
B
s
As
−+
−+=Θ , ahol a
I
a
pp
mcT
k
A ϑ
ϑ
==21
Idıtartományba transzformálva (aperiodikus üzemmód):
( ) tptpa CeBet 21 ++= ϑϑ .
Állandósult állapotban (az exponenciális összetevık lecsengése után) a szabályozott jellemzı egyenlı az alapjellel, vagyis az integrál-szabályozó nulla hibát biztosít.
Határesetben a nevezı diszkriminánsa nulla, mc
h
T
k
I 4
2
= , a célfüggvény operátor-tartomány-
ban ( )( ) mc
hq
qss
qsqs
mc
hss
mcT
k
mc
hss
s akI
ak
2;
2
2
2
20
2
2
02
=+
++=
+
++=
ϑϑϑϑϑϑ
Θ alakú.
Elemi törtekre bontva:
( )( )
( )aka
a
qBA
qs
B
qs
A
ss
ϑϑϑϑϑ
ϑΘ
−−=−=+
++
+=
00
2
2;
,
végül idıtartományba transzformálva:
( ) ( )[ ] qtakaa etqt −−−+−+= ϑϑϑϑϑϑϑ 00 2
Nagyobb erısítés/integrálási állandó arányt választva a célfüggvény pólusai negatív valós résző konjugált komplex számok lesznek. Ennek következtében az idıfüggvénynek az alapjellel egyenlı állandó mellett csillapított lengı összetevıi lesznek. A túllendülés mértéke az erısítéstıl függ. Nagyobb erısítés gyorsabb szabályozást, de egyúttal nagyobb túllendülést is jelent.
A csillapított lengı választ eredményezı függvényalak operátor-tartományban:
( ) ( )( ) 2222
02
22
ωϑ
ϑϑϑΘ
+++++=
−+
+
++=
qs
CqsB
s
mc
h
mcT
k
mc
hss
mcT
k
mc
hss
s a
I
I
ak
,

ahol
mchCB
mc
h
mcT
k
mc
hq ak
aI 2
2;;
2;
20
0
22 ϑϑϑϑϑω −−
=−=
−== .
Ezzel:
( ) ( )( ) ( ) 220
220 2
2
ωω
ωϑϑϑ
ωϑϑϑΘ
++−−+
+++−+=
qsmch
qs
qs
ss ak
aa
Az utolsó két tört inverz Laplace transzformációja a következı összefüggésekkel történik:
( )te
qs
qs qt ωω
cos22
1 −− =
+++
L
( )te
qsqt ω
ωω
sin22
1 −− =
++L ,
mivel:
( ) ( )( )( ) ( )( ) teee
j
jqsjqs
j
jqsjqsqs
qttjqtjq ωωω
ωωω
ωω
ωω sin2
11
21
1
221
−+−−−−
−−
=−=
−+−
++=
=
−−++=
++
L
LL
( ) ( )( )( ) ( )( ) teee
jqsjqs
jqsjqs
qs
qs
qs
qttjqtjq ωωω
ωωω
ωω cos2
111
2
11
1
221
−+−−−−
−−
=+=
−++
++=
=
−++++=
+++
L
LL
és (Euler-képlet):
ααα sincos je j += . Idıtartományba transzformálva:
( ) ( ) teqtet qtakqtaa ω
ωϑϑϑωϑϑϑϑ sin
2cos 0
0−− −−
+−+= ,
ahol
2;2
qmcT
k
mc
hq
I
−== ω .

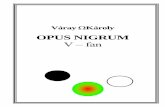
A 3. ábra az alábbi adatokkal készült:
m = 10 kg; Számított értékek:
c = 450 J/kgK; q = 0.001 Hz;
h = 9 W/K;
ϑk = 300 K;
ϑ0 = 400 K;
ϑa = 900 K;
a b c
k/ TI [W/Ks] 0.45 0.045 0.0045
ω [rad/s] 0.01 0.003 aperiodikus