INTRODUCCION AL CONTROL EN REGIMEN DINAMICODE UN MOTOR...

If you can't read please download the document
Transcript of INTRODUCCION AL CONTROL EN REGIMEN DINAMICODE UN MOTOR...
-
IINNTTRROODDUUCCCCIIOONN AALL CCOONNTTRROOLL EENNRREEGGIIMMEENN DDIINNAAMMIICCOODDEE
UUNN MMOOTTOORR DDEE IINNDDUUCCCCIIOONN
G. CASARAVILLAR. CHAERI.I.E 1992
-
Control en rgimen dinmico de la M.I E.P.
INDICE
1 INTRODUCCION Pg. 1
2 MODELO DINAMICO DE UN MOTOR DE INDUCCION Pg. 2
Campo magntico generado por una bobina. Pg. 2Campo en el entrehierro generado por tres bobinas. Pg. 4Vector espacial. Pasaje de dos a tres coordenadas. Pg. 5 Magnetizante en el entrehierro. Pg. 5 Mutua entre dos bobinas, cuyos ejes forman un ngulo . Pg. 6Mutua entre dos grupos de bobinas girados un ngulo . Pg. 8Matriz de mutuas de una Mquina de Induccin. Pg. 9Par elctrico en un sistema electromecnico. Pg.10Par de la Mquina de Induccin. Pg.12Ecuaciones electromagnticas de la Mquina de Induccin. Pg.14Ecuaciones Dinmicas de la Mquina de Induccin. Pg.15Modelo de la Mquina de Induccin en Coordenadas de Campo. Pg.15Pasaje de dos a tres coordenadas. Pg.18
3 BIBLIOGRAFIA Pg.18
4 APENDICES Pg.19
Apndice 1 : Clculos intermedios. Pg.19
-
Control en rgimen dinmico de la M.I E.P.
Pg. 1
1 INTRODUCCION
-
Control en rgimen dinmico de la M.I E.P.
Pg. 2
2 MODELO DINAMICO DE UN MOTOR DE INDUCCION
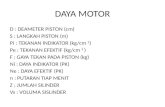
2.1 Campo magntico generado por una bobina
Se supone la mquina con entrehierro uniforme con longitud radial h como se muestra enla figura 1.
e1 es el eje de la bobina y ser el eje desde elcual se medirn los ngulos. Los conductores de labobina tienen simetra axial respecto a e1.
Los conductores de la bobinas estarndistribuidos en las ranuras, pero a los efectos desimplificar el anlisis, supondremos que la distribucin de espiras es n(), queriendo indicar con ello que en la posicin y con el ngulo barrido pord hay n() d barras de espiras.
Se asumir que n() es sinusoidal, en tal casose dice que la bobina tiene distribucin sinusoidal deespiras
Fig. 1. Corte de la M.I.
Sea N el numero total de espiras de la bobina, se deber cumplir:
N = n( ) d n( ) = N
2 e ( )
=0
. s n [1]
Para calcular el campo H en la posicin a, supondremos que la permeabilidad delhierro es lo suficientemente alta como para afirmar que H = 0 en el cuerpo del estator y delrotor. Adems como en el aire B y H son colineales y B es perpendicular a la superficie de hierro, supondremos que B es radial y lo consideraremos positivo cuando es saliente delrotor.
h
rotor
estator
entrehierro
e1
.
-
Control en rgimen dinmico de la M.I E.P.
Pg. 3
Supondremos adems que B() = - B( + ) esto se cumple dado que la bobina presenta simetra respecto del plano perpendicular a su eje que pasa por el centro del rotor, o de manera equivalente n() = n( - ).
Como h es pequeo comparado con el radio del rotor podemos suponer que el campomagntico es constante al atravesar el entrehierro en forma radial, quedando determinado suvalor por la posicin angular del entrehierro.
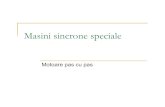
Con todas estas suposiciones y eligiendo el camino de integracin que se muestra en lafigura 2 para el clculo de H() tenemos:
H.dp = 2 h H( ) = n( ) I sig (sen ) d=
= +
[2]
Siendo I la corriente por la bobina, positivaen el sentido que el flujo generado sobre el eje tiene la misma direccin que la orientacindada al eje.
I sig( sen ) es la corriente por un conductor que se encuentra en la posicin = , con el signo adecuado para calcular los ampare-espiras encerrados por el camino de integracin.
Evaluando la integral obtenemos:
H( ) = N
2 hI cos [3]
Fig. 2. Campo de una bobina
Este resultado nos permite representar a la corriente magnetizante como un vector demagnitud N I segn el eje de la bobina. Si e1 es el eje de la bobina, diremos que N I e1 es el "vector de corriente magnetizante" de la bobina.
h
rotor
estator
entrehierro
e1
.
camino de integracion
-
Control en rgimen dinmico de la M.I E.P.
Pg. 4
Con esta definicin,
H(u) = N I
2 h e .u1 [4]
es decir, el campo H segn la direccin del versor u es el producto escalar entre el vector decorriente magnetizante de la bobina con el versor, dividido por el doble del espesor delentrehierro.
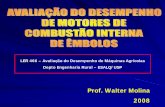
2.2 Campo en el entrehierro generado por tres bobinas.
Supongamos tres bobinas cuyos ejes se encuentran separados 120o espacial-elctricoscomo se muestra en la figura 3.
Estas bobinas son las que corresponden a una mquina de un par de polos por lo que losgrados espacial-elctricos coinciden con los mecnicos.
El campo H segn la direccin de un versor u ser
( )H(u) = 12 h
N I e + N I e + N I e .u1 1 2 2 3 3 [5]
Observar que el campo es el que resultara de una bobina con vector de corriente magnetizante igual a la suma de los vectores magnetizantes de las tres bobinas.
De lo anterior se desprende que el campo en el entrehierro es indentificable con un vector de dos coordenadas, seguidamente introduciremos una notacin con nmeros complejos como manera de representar vectores de dimensin dos, notacin que facilitara enormemente las deducciones del modelo del motor deinduccin.
Fig. 3. Sistema trifsico de bobinas
e3
e1
e2
120
-
Control en rgimen dinmico de la M.I E.P.
Pg. 5
2.3 Vector espacial. Pasaje de dos a tres coordenadas
Sean I1 I2 I3 tres magnitudes reales.
Definiremos a = e j ; = 2 / 3
i = I1 + a I2 + a2 I3
Con estas definiciones diremos que i es el vector espacial asociado con las variablesreales I1 I2 I3.
Dicho vector espacial ser representable en el plano complejo por lo que llamamos a latransformacin pasaje de tres a dos coordenadas.
[ ]X = 1 a a I =I
I
I
i = X I21
2
3
[6]
El vector espacial asociado a las tres variables reales que lo determinan no es un fasorcomo usualmente se entiende.
2.4 Magnetizante en el entrehierro
Tomando la ecuacin [5]
( )H(u) = 12 h
N I e + N I e + N I e .u1 1 2 2 3 3 [7]
con la notacin introducida, los ejes de las tres bobinas son identificables con lossiguientes vectores espaciales:
e1 = 1 e2 = a e3 = a2
por estar las bobinas como muestra la figura 3.
Cuando hacemos la transformacin al plano complejo, el eje real de dicho plano coincidecon e1.
-
Control en rgimen dinmico de la M.I E.P.
Pg. 6
Luego u = e j por lo que
( )H(u) = N2 h
XI e = N
2 h i e j j. . [8]
El producto escalar de dos complejos verifica la forma
Re( )
Im( ).
Re( )
Im( )
z
z
w
w Re{z w } = Re{z w}* *
= [9]
por lo tanto
H( ) = 1
2h N Re { i e }-j [10]
2.5 Mutua entre dos bobinas, cuyos ejes forman un ngulo
Supongamos que la bobina 1, de N1 espiras esta recorrida por una corriente I1 .
La bobina 2 de N2 espiras es atravesada por las lneas del campo generado por labobina1.
El eje de la bobina 2 se encuentra girado un ngulo q en sentido antihorario deleje de la bobina 1.(ver figura 4).
Por lo tanto si e1 = 1,tomaremos e2 = e
j -
-
-
e2
e1
-
Control en rgimen dinmico de la M.I E.P.
Pg. 7
Fig. 4. Mutua entre dos bobinasEl campo generado en el entrehierro por la bobina 1 es:
B = o H B( ) = o
2h N Re { I e }1 1 -j
[11]
El flujo de dicho campo enlazado por la espira 1 de la bobina 2 que tiene una de las barras enla posicin ( - ) y la otra en ( + ) se calcula como:
= B . n dsS [12]
r y l son el radio y largo del entrehierro
( ) = B( )lrd = N I
lr
2hRe(e )d
-
+
o1 1
-
+-j
}
( ) = N I
lr
2hRe{ e d =
N I lr
2hRe{je - je }o
1 1
-
+-j
o1 1 -j( + ) -j( - )
( ) = N Ilr
2hRe{je (e - e )} =
N I lr
hRe{e sen }o
1 1 -j -j jo
1 1 -j
( ) = N Ilr
h sen Re{e }o
1 1 -j [16]
para calcular el flujo total enlazado por la bobina 2 realizamos una integracin sobre la variable e a los efectos de tener en cuenta todas las espiras, para lo cual supondremos que labobina 2 tambin tiene distribucin sinusoidal de espiras.
2=0
2N = n( ) d n( ) = N2
sin( )
.
1 Se hace notar que dada la simetra de el planteo, tomamos como una espira dos conductores que no coincidencon un vuelta real, la cual sera de paso diametral.
-
Control en rgimen dinmico de la M.I E.P.
Pg. 8
por lo tanto
12=0
=2
o1 2 1 -j
=0
=2 = ( ) N
2 sen d = N N I
lr
2h Re{e } sen d
= N N Ilr
4h Re{e }12 o
1 2 1 -j
12 1 o1 2 = M ( ) I con M =
N N lr
4h
cos [20]
Entonces la mutua entre las dos bobinas se puede expresar como
M( ) = M Re{e e }1*
2 [21]
en donde e1 y e2 son los ejes de las bobinas, es el ngulo que forman dichos ejes y M esuna constante que depende del numero de vueltas de las bobinas, de la longitud del rotor l,del radio r del rotor y del espesor del entrehierro h.
Por otra parte si tenemos en cuenta que el sistema real no tendr acoplamiento perfecto,se define el factor de acoplamiento global o tal que:
M( ) = M Re{e e }o 1*
2 [22]
2.6 Mutua entre dos grupos de bobinas girados un ngulo .
Sean, el grupo que llamaremos S, constituido por las tres bobinas estatricas de lamquina de ejes ( 1 ), ( a ) y ( a2 ) y el grupo que llamaremos R formado por las tres bobinasrotricas cuyos ejes son ( e j ), ( e j a ) y ( e j a2 ).
Las bobinas de S son de Ns espiras mientras que las de R son de Nr espiras.
Buscaremos la matriz de mutuas de este sistema, que se ajusta a la siguiente ecuacin:
s sr r = M I [23]
-
Control en rgimen dinmico de la M.I E.P.
Pg. 9
es decir que en la fila 1 de dicha matriz estarn las mutuas entre la bobina 1 del grupo S ycada una de las del grupo R que tendrn factor de acoplamiento ho que por simetra supondremosconstante para todas las fases.
[ ]{ } { }fila 1 = M Re 1 e ,e a,e a = M Re 1 X eo * j j j 2 o * j [24]anlogamente para las filas 2 y 3 tenemos:
{ } { }fila 2 = M Re a X e y fila 3 = M Re a X eo * j o 2* j [25]
{ } M = M Re X X e = L K( )sr o t* j o . [26]
habiendo definido:
{ }o o t* jL = 32 M y K( ) = 2
3 Re X X e [27]
K =
( ) ( + ) ( + 2 )
( + 2 ) ( ) ( + )
( + ) ( + 2 ) ( )
( )
cos cos cos
cos cos cos
cos cos cos
2
3
[28]
2.7 Matriz de mutuas de una Mquina de Induccin.
Si definimos
I I
I M( ) =
M M
M Ms
r
s
r
ss sr
rs rr
=
=
[29]
tendremos que = M( ) I [30]
generalizando el resultado de la seccin anterior
-
Control en rgimen dinmico de la M.I E.P.
Pg. 10
M( ) = K(0) L K( ) LK(- ) L K(0) L
s o
o r
[31]
Para deducir la segunda fila de M() se tom las bobinas estatricas como ( e j ), ( e j a )y ( e j a2 ) y las rotricas como ( 1 ), ( a ) y ( a2 ) lo cual justifica usar la misma definicin deK().
Por otra parte se tomaron factores de acoplamiento global s y r que son mayores2 a o,pudiendo definir en estas condiciones (tomaremos para simplificar N1 = N2)
( ) ( )s s o r r oL = 1 + L L = 1 + L [32]
donde ss y sr se definen como factores de fugas de estator y rotor respectivamente.
Luego se define el factor global de fugas como:
( )( ) = 1-
1
1 + 1 +s r[33]
2.8 Par elctrico en un sistema electromecnico
Si suponemos que el sistema es conservativo, (con lo cual estamos despreciando la histrisis del material magntico), la energa almacenada en el campo magntico se puedeexpresar en funcin de las variables (I, ), donde I es el vector de corrientes I1 , I2 , ... In de los circuitos que forman el sistema y e es una coordenada que identifica la posicin angular dela parte giratoria del sistema.
Supondremos los circuitos con resistencia nula, y por lo tanto, toda la energa queingresa en forma elctrica, se transforma parte en la energa del campo y parte en aumentar laenerga cintica de la parte mvil.
2 El factor de acoplamiento de una bobina es mximo con sigo mismo, respecto al que tiene con otras bobinasdel circuito
-
Control en rgimen dinmico de la M.I E.P.
Pg. 11
Para calcular la energa del campo, correspondiente al punto ( I , ), procederemos aintegrar la potencia que ingresa en forma elctrica, manteniendo e constante.
Si M(), es la matriz de mutuas del sistema, tendremos que la potencia elctrica es:
[ ]e t tW = I d
dt = I
d
dtM( )I
[34]
como = cte.
d
dtM( ) = 0 y W = I M( )
d
dtIe
t
[35]
Tomando un camino de integracin P(t) = tI con t en el intervalo [0, 1]
ct=0
t=1
et=0
t=1t tU (I, ) = W dt = I M( )Itdt =
1
2I M( )I
[36]
ctU (I, ) =
1
2I M( )I [37]
U es la "Energa del campo Magntico".
Para calcular el par, realizamos un desplazamiento virtual en el que variamos e en de,manteniendo I constante ( dI = 0 ).
e c mec
c ct
mec e
W = U W
U = U I = I M( ) I
W = C
+
( , ) . .
.
1
2[38]
luego
[ ] [ ] [ ]e t tW = Id
dtM( )I = I M( )I +
IM( )I I
[39]
-
Control en rgimen dinmico de la M.I E.P.
Pg. 12
teniendo en cuenta que
e eW = W t = t I = I t
[40]
[ ] [ ]e t tW = I M( )I = I M( )I
[41]
despejando Ce
etC =
1
2 I M( )I
[42]
Siendo Ce el par elctrico ejercido sobre la parte mvil.De la ecuacin se desprende que las corrientes en las bobinas y la posicin relativa de
stas, determinan el valor del par elctrico.
2.9 Par de la Mquina de Induccin
Como se determin en el punto 2.6, la matriz de mutuas para la MI es:
M( ) = K(0) L K( ) LK(- ) L K(0) L
s o
o r
[43]
aplicando la formula deducida para el par, tenemos:
[ ]e ts tr sr
C = 1
2 I , I M( )
I
I. .
[44]
eo t
s rt
r sC = L2
I K( ) I + I K(- ) I
[45]
-
Control en rgimen dinmico de la M.I E.P.
Pg. 13
utilizando las igualdades 3 y 5 del Apndice 1
( )e o ts r o ts t *j rC = L I K( ) I = 23 L I Im X e X I
[46]
( )e o ts t *j rC = 23 L Im I X e X I
[47]
( ) ( ) ( )e o ts *j r o s *j rC = 23 L Im X I e X I = 2
3L Im i e i
[48]
( )e o s *r jC = 23 L Im i i e
[49]
En esta ltima expresin del par motor elctrico en la mquina de induccin, los vectoresespaciales de la corriente de estator y de la corriente de rotor estn referidos a sus respectivossistemas de coordenadas.
Dichos sistemas de coordenadas complejas estn desfasados un ngulo como de ve en lafigura 5.
coordenadas estatoricas
coordenadas rotoricas
s
r
.
w
Fig. 5. Sistemas de coordenadas
-
Control en rgimen dinmico de la M.I E.P.
Pg. 14
2.10 Ecuaciones electromagnticas de la Mquina de Induccin.
Las ecuaciones elctricas de el estator y rotor son:
s s s s
r r r r
U = R I + d
dt
U = R I + d
dt
[50]
Las ecuaciones magnticas son:
s ss s sr r
r rs s rr r
= M I + M I
= M I + M I
[51]
Aplicando X a estas ecuaciones
s s s s
r r r r
u = R i + d
dt
u = R i + d
dt
[52]
s s s oj
r
r o-j
s r r
= L i + L e i
= L e i + L i
[53]
2.11 Ecuaciones Dinmicas de la Mquina de Induccin
-
Control en rgimen dinmico de la M.I E.P.
Pg. 15
Tomando la expresiones vistas, agregando las ecuaciones mecnicas y trabajando con unamquina con p pares de polos tenemos:
( )
( )
s s s s s oj
r
r r r o-j
s r r
u = R i + Ld
dti + L
d
dte i
u = R i + Ld
dte i + L
d
dti
[54]
( )e o s *r j
e L
C = p 2
3L Im i i e
d
dt = p
J d
dt = C - C ( , , t)
.
.
[55]
2.11 Modelo de la Mquina de Induccin en Coordenadas de Campo
Hasta aqu hemos llegado con las ecuaciones dinmicas de la mquina en funcin devectores espaciales en coordenadas de estator y en coordenadas de rotor.
Trataremos de expresar dichas ecuaciones en un sistema de coordenadas que sea solidariocon el vector de flujo rotrico.
De las ecuaciones dinmicas
= L e i + L i = L i + L
Li e er o
-js r r o s
r
or
j -j
[56]
-
Control en rgimen dinmico de la M.I E.P.
Pg. 16
con lo que podemos poner
r o mr-j
mr sr
or
j
= L i e
i = i + L
Li e
[57]
Se define imr como el vector de corriente magnetizante rorrica, expresado encoordenadas de estator.
El vector de flujo rotorico, en coordenadas de estator es:
rs rj = e [58]
por lo que
rs o mr = L i [59]
Luego se puede expresar
mr mrji = I e [60]
El ngulo nos da la informacin necesaria para ubicar el vector de corrientemagnetizante imr y por tanto la de el flujo rotrico.
Al sistema de coordenadas solidario con el vector de campo lo llamaremos "sistema decoordenadas de campo" o " sistema dq" (de directa y cuadratura) el cual vemos representado enla figura 6 en donde se definen:
d
dt =
d
dt =
d
dt = 1 mr
[61]
Si queremos la expresin de imr y de is en las coordenadas dq tenemos que
s dq s-j
sd sq
mr dq mr-j
mr
i = i e = I + j I
i = i e = I
[62]
-
Control en rgimen dinmico de la M.I E.P.
Pg. 17
s
r
dq
-
-
w
wmr
Fig. 6. Sistemas de coordenadas s r y dq
Habiendo definido Isd la componente directa e Isq la componente en cuadratura de lacorriente estatrica en el referencial dq.
Teniendo en cuenta que ur = 0, sustituimos ir en dicha ecuacin, separamos en parte reale imaginaria y obtenemos:
mr r mr sd
sq
r mr
I + d
dtI = I
d
dt =
I
I +
[63]
Luego, haciendo el cambio a coordenadas dq, la expresin del par queda:
e
2o
rsq mrC =
2
3 L
L I I [64]
-
Control en rgimen dinmico de la M.I E.P.
Pg. 18
y por ltimo, mediante operaciones similares, la ecuacin que determina la tensin estatricaqueda:
( )
( )
s sd sdsd
ss mr sq s mr
s sq sqsq
ss mr sd s mr mr
d
dtI + I =
u
R + I - 1 -
d
dtI
d
dtI + I =
u
R - I - 1 - I
[65]
2.13 Pasaje de dos a tres coordenadas
Se puede demostrar, que si I1 + I2 + I3 = 0, el cambio de coordenadas es reversible y lascomponentes reales que determinan el vector espacial de una terna se calcula como:
I = 2
3 Re { X i }t* [66]
3 BIBLIOGRAFIA
1.- W. Leonhard. "Control of Electrical Drives". 1985
-
Control en rgimen dinmico de la M.I E.P.
Pg. 19
4 APENDICES
Apndice 1 : Clculos intermedios
X X = 0t [1]
X X = 3t* [2]
tK ( ) = K(- ) [3]
{ }K( ) = 23
Re e X X j t* [4]
{ } ( ) K( ) = 23
Re j e X X = 2
3 Im X X e j t* t
*j
[5]
X K( ) = e Xj. . [6]
X K ( ) = e Xt -j. . [7]

![Part6.2 Electrical Motor [Kompatibilitätsmodus] · Source: International Electrotechnical Commission (IEC) and motor suppliers data. ... Rating factors for motor power: Nameplate](https://static.fdocument.org/doc/165x107/5b7d4b587f8b9a9d078d0e60/part62-electrical-motor-kompatibilitaetsmodus-source-international-electrotechnical.jpg)