Single phase induction motor
25
SINGLE PHASE INDUCTION MOTOR 1
-
Upload
gowtham-packiaraj -
Category
Engineering
-
view
226 -
download
3
Transcript of Single phase induction motor

1
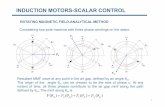
SINGLE PHASE INDUCTION MOTOR

2
DOUBLE FIELD REVOLVING THEORY
• AC current flows through the Stator two fields are generated
1.φf- forward rotating field2.φb-backward rotating field• Pulsating field- due to various magnitudes of
field at diff time

3
Resultant flux φr = 2 x =

4

5
Why 1 phase induction motor is not self starting
• Rotor = squirrel cage type rotor
• Alternating flux – not required to produce rmf

6
Split phase induction motor
• Two winding• Main winding & auxiliary
winding• 90 degree phase angle• Main winding – low
resistance and high reactance
• Aux winding- high resistance and low reactance
• Switch = motor pickup its 75 % of its rated speed.

7
Working….
• Is lags by V because low reactance and high resistance
• Im lags V by very large angle due to high reactance
• Starting torque proportional to sin α
• Disconnect switch after reach its 75 % of rated speed

8
Capacitor induction motor
1. Capacitor start motor2. Permanent capacitor motor3. Capacitor start capacitor run motor

9
Capacitor start motor
• Electrolytic capacitor • 90degree phase angle• Im and Is • Im lags V due to high
reactance of main winding
• Due to capacitor Is lead V• Im and Is angle 90 • High starting torque • Apps: Lathes, drilling
machiine,fan etc

10
Capacitor start, capacitor run motor

11
Synchronous motor
• Machine which converts electrical energy into mechanical energy that rotates at a constant speed equal to synchronous speed
• Alternator can runs as a synchronous motor if
AC -> armature winding DC-> field winding

12
Synchronous motor
Parts of 3 phase synchronous motor1. Laminated stator core
with 3 phase armature winding
2. Rotating field structure complete with damper winding and slip rings
3. Two end shields to house the bearings that support the rotor shaft

13
Principle of operation

14
Starting of synchronous motor
1. Dc motor method2. Pony motor method3. Damper winding method4. Starting as a slip ring induction motor

15
Dc motor method
• Attaching an external motor to it to bring syn. Machine up to full speed
• Then syn. Machine be paralleled with its power system as a generator
• Now starting motor can be detached from machine shaft, then its slow down
• machine change its mode to be motor• Once paralleling completed syn. Motor can be
loaded down in an ordinary fashion

16
Pony motor method
• Since starting motor should overcome inertia of syn. machine without a load & starting motor can have much smaller rating
• since most syn. motors have brushless excitation systems mounted on their shaft, often these exciters can be used as starting motors
• For many medium-size to large syn. motors, an external starting motor or starting by using exciter may be the only possible solution , because the connected power system source may not be able to feed the required starting current for amortisseur winding

17
Damper winding method
• most popular method is to employ amortisseur or damper winding
• armortisseur windings are special bars laid into notches carved in face of a syn. motor’s rotor & then shorted out on each end by a large shorting ring
• pole face shown in next slide• To understand what a set of amortisseur windings
does in a syn. motor, examine salient 2 pole rotor shown next

18

19
Starting as a slip ring induction motor
• Damper winding method of starting doesn’t provide high starting torque
• To get high starting torque instead of shorting the damper winding – designed a three phase star winding , end brought to slip ring
• External rheostat connected in series with rotor circuit.

20
Effect of change in excitation of synchronous motor

V Curves• Plot armature current as a function of field current or
armature current as a function of excitation voltage.

22

23

24

25
Applications • Synchronous motors are particularly attractive for low speeds (< 300r.p.m.) because the power factor can always be adjusted to unity and efficiency is high.• Overexcited synchronous motors can be used to improve the power
factorof a plant while carrying their rated loads.• They are used to improve the voltage regulation of transmission lines.• High-power electronic converters generating very low frequencies enableus to run synchronous motors at ultra-low speeds. Thus huge motors in the• 10 MW range drive crushers, rotary kilns and variable-speed ball mills.