
LOCAL RIGIDITY OF HYPERBOLIC MANIFOLDS WITH GEODESIC BOUNDARY

Graph Rigidity for Near-Coplanar Structure from Motion2Queensland University of Technology, Australia1CSIRO ICT Centre, Australia
Jack Valmadre1,2 Simon Lucey1,2Sridha Sridharan2
10−3
10−2
10−1
10−1
100
101
102
103
104
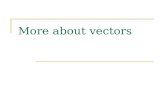
σ (Magnitude of Gaussian noise)
Coplanar Tetrahedron
Ave
rag
e le
ng
th e
rro
r (%
)
Factorisation
Quartic
Graph rigidity
10−3
10−2
10−1
10−1
100
101
102
103
104
σ (Magnitude of Gaussian noise)
Tetrahedron
Ave
rag
e le
ng
th e
rro
r (%
)
Factorisation
Quartic
Graph rigidity
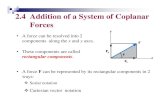
Inpu
t im
age
Fact
oris
atio
nG
raph
rigi
dity
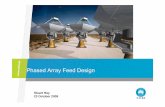
Inpu
t im
age
Pose
like
lihoo
d
�ij
1
stqtij zti
ztjimageplane
A four-point rigid torso can be used to estimate human pose [1]. However, since it is almost coplanar, factorisation using the SVD will not give an a�ne reconstruction.
Weak perspective projection and Pythagoras’ theorem provide a system of equations.
Non-convex objective.
Introducing a relaxation and using the nuclear norm heursitic to minimise rank [2], a convex objective can be obtained. Results in situations with a small number of coplanar points are more accurate.
Rigid pose estimate critically a�ects bone length estimates through scale.
Pose likelihood learned from motion capture to reduce remaining ambiguity.
[1] X. Wei and J. Chai, Modelling 3D human poses from uncalibrated monocular images. ICCV, 2009.
[2] M. Fazel, Matrix rank minimization with applications. PhD thesis, Stanford University, 2002.







![W -RIGIDITY FOR THE VON NEUMANN ALGEBRAS OF …arXiv:1508.04678v1 [math.OA] 19 Aug 2015 W∗-RIGIDITY FOR THE VON NEUMANN ALGEBRAS OF PRODUCTS OF HYPERBOLIC GROUPS IONUT CHIFAN, ROLANDO](https://static.fdocument.org/doc/165x107/5e7c706ad134df2adf54aa06/w-rigidity-for-the-von-neumann-algebras-of-arxiv150804678v1-mathoa-19-aug.jpg)






![RIGIDITY OF GROUP ACTIONS [12pt] I. Introduction to Super-Rigidity](https://static.fdocument.org/doc/165x107/613d4e5f736caf36b75bc34e/rigidity-of-group-actions-12pt-i-introduction-to-super-rigidity.jpg)