Faire le point sur l’estimation de la vitesse dans le cadre du … · REDRESSEUR MLI TRANSFORMEE...
19
Objectif Faire le point sur l’estimation de la vitesse dans le cadre du contrôle basse vitesse d’une machine asynchrone Jeudi 12 Mai 2005 – p. 1/20
Transcript of Faire le point sur l’estimation de la vitesse dans le cadre du … · REDRESSEUR MLI TRANSFORMEE...

Objectif
Faire le point sur l’estimation de la vitessedans le cadre du contrôle basse vitessed’une machine asynchrone
Jeudi 12 Mai 2005
– p. 1/20

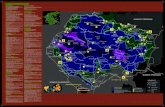
Contexte
HACHEUR DE
RECUPERATION
ONDULEUR ET
ESTIMATEURS /
OBSERVATEURS
v∗
saisbisa v∗
sb v∗
sc
TrRs
Ψ Ω
Θg
ASYNCHRONEMACHINE
REGULATEURS
REDRESSEUR
MLI
TRANSFORMEE DE PARK
INVERSETRANSFORMEE DE PARK
FLUX, VITESSE, COURANTS
Ω
isd isqv∗
sqv∗
sd
Θg
isbisa
vsb
vsc
v∗
sb
vsa
v∗
sa v∗
sc
Θ ou Ω
MAS
Ψ∗
Ω∗
FILTRAGE
TrRsΨ
Θg
RE
SE
AU
ED
F
U0
Supposeesidentiques
MESURES courant
– p. 2/20

Modèle diphasé
MODELE A 5 PARAMETRES
Lm
(Lr − Lm)(Ls − Lm)
jωgψ′
s
Rr
j(ωg − ω)ψ′
r
i′
r
dψ′
r
dt
dψ′
s
dt
Rs
u′
s
i′
s
Ls − LM
Rs
u′
s
i′
s
jωgψ′
s
i′
R
RR
LM
dψ′
s
dt
dψ′
R
dtj(ωg − ω)ψ
′
R
Lσ
MODELE A 4 PARAMETRES
u′
s = Rsi′
s + jωgψ′
s+ d
dtψ
′
su
′
s = Rsi′
s + jωgψ′
s+ d
dtψ
′
s
ψ′
s= Lsi
′
s + Lmi′
r ψ′
s= (Lσ + LM)i
′
s + LM i′
R
ψ′
r= Lri
′
r + Lmi′
s ψ′
r= LM(i
′
r + i′
s)
Rri′
r + j(ωg − ω)ψ′
r+ d
dtψ
′
r= 0 RRi
′
R − jωψ′
R+ jωgψ
′
R+
d
dtψ
′
R︸ ︷︷ ︸
ef
= 0
x′
s = c(xa + axb + a2xc
)e−jθg avec c = 2
3ou
√23
x′
r = c(xA + axB + a2xC
)e−j(θg−θ) avec a = ej 2π
3
– p. 3/20

FONCTIONNEMENT
Orientation du repère tournant sur le flux rotorique R.F.O.C.
ωg = ωs, ψ′
R= ψRd
+ j0 = ψR,
ωr=RRisq
ψR
= ωs − ω,dψR
dt= −
1
τR
ψR + RRisd
⇒ tem =3
2PψRisq
.
pδ = −
3
2Re(ef i∗R) =
3
2
(1
RR
(dψ
′2R
dt) +
ψ2Rω2
s
RR
ωr
ωs
)pm = tem
ω
P=
3
2
ψ2Rω2
s
RR
(ωr
ωs
−
ω2r
ω2s
)
QUADRANTS Fonctionnement générateur siωr
ωs
< 0
Fonctionnement moteur si 0 <ωr
ωs
< 1 Freinage siωr
ωs
> 1
– p. 4/20

Estimation du flux et de la vitesse
is
ψ′
Rdψ
′
R
dt = us − Rsis − Lσdisdt
Exprime dans le repere statorique
Voltage model
us
ωr =RRisq
ψR= ωs − ω ⇒ ω =
(ωs −
RRisq
ψR
)
ωs = dθs
dtavec θs = arctan
ψrβ
ψrα
Takahashi et Noguchi (1986) Depenbrock (1988) en D.T.C.Xu et Novotny (1991) S.F.O.C. Othani (1992)
Shin (2000) Harnefors (2003)– p. 5/20

Modèle de référence adaptatif
Modèle de référence adaptatif, MRAS (Schauder88)
2
2
2
2
+
-
Modele adaptatif
Modele de r eference
Moteur
Us
Is
Is
Loi
ω
d’adaptation d’erreur
Terme
e
ψ′
Rref
ψ′
R
ǫ
– p. 6/20

Equations
Modèle de référence :d
dtψ
′
Rref= us − Rsis − Lσs
d
dtis
Modèle adaptatif :d
dtψ
′
R= (−
1
Tr
+ jω)ψ′
R+ RRis
Terme d’erreur
ǫ = Im(ψ′
Rrefψ
′∗
R)
Loi d’adaptation issue du critère d’hyperstabilité depopov
ω = −Kpǫ(t) − Ki
∫ǫ(t) dt
– p. 7/20

extension M.R.A.S.
Tamai (1987) avait montré la stabilité en prenant en compteles filtres. Cet estimateur est stable en basse vitesse àcondition que les paramètres soient connus avec précision.Nitayotan et Sangwongwanich (2001) utilisent les travauxde TamaiPeng et Fukao (1994) utilisent la variable qf = 3
2Im(ef i∗s)
qfref=
3
2Im
((us − Lσ
disdt
− jωgLσis)i∗
s
)
qf =3
2Im
((−1
τR
+ jω)ψRi∗s
)
Le terme d’erreur est ǫ = qf − qfref
– p. 8/20

Observateur adaptatif(kubota93)
2
-
+
Moteur asynchrone
Observateur adaptatif
Us
B C
A
∫
G
+
+ +
Is
Is
Is
ψ′
R
ei
Ψ′
R
ei
Mecanisme d’adaptation
Loi d’adaptationTerme d’erreur
ǫ
ω
– p. 9/20

Fonction de Lyapounov
d
dtX = AX + BUs + G(Is − Is)
Is = CX
avec X =
[Is
Ψ′
R
]et G : matrice de gain d’observation.
Estimation : ω = ω + ∆ω
Fonction de Lyapunov (kubota93): V = eTi ei +
∆ω2
λ
– p. 10/20

Condition de stabilité
d
dtV < 0
Le calcul de la dérivée donne
d
dtV = 2eT (A + GC)e + 2k∆ωImeiψ
′∗
R + 2
∆ω
λ
d
dt(ω)
− 2∆ωImψ′
Rψ
′∗
R
Deux conditions pour assurer la stabilité :Condition 1 ⇒ eT (A + GC)e < 0 ⇒ calcul de la matrice GCondition 2 ⇒
2k∆ωImeiψ′∗
R + 2
∆ω
λ
d
dt(ω) − 2∆ωImψ
′
Rψ
′∗
R = 0
– p. 11/20

Loi d’adaptation
à partir de la condition 2
d
dtω = λ[Imψ
′
Rψ
′∗
R − kImeiψ
′∗
R]
Choix kubota93
Condition 1 ⇒ G = (k1 − 1)Rs
k1 + 1
k1 −τ
′
s
τ′
r
+ jτ′
sω
avec k1 = 0 soit G = 0
Condition 2 ⇒ le terme Imψ′
Rψ
′∗
R est négligé : ψ
′
R→ ψ
′
R
– p. 12/20

Loi d’adaptation
ω = −Ki
∫ǫ dt
Terme d’erreur
ǫ = Im(is − is)ψ′∗
R
Remarque : résultat similaire par hyperstabilité (Yang93)
– p. 13/20

Solutions récentes
⇒ instable en basse vitesse Tajima (2002) Suwankawin(2002)les solutions proposées : Kubota (2002)
k1 =
1
2
ωs
ω(1 +
τ′
s
τ′
r
) si ωωs
< 0
1 sinon
Hinkkanen (Décembre 2004)
ǫ = Im(is − is)ψ′∗
Re−jφ
Stabilise tous les deux à basse vitesse pour desparamètres connus.Rashed et Vas (2003) la stabilité doit aussi tenir compte deRs : estimations simultanées.
– p. 14/20

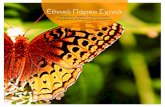
Banc expérimental du L.A.I.I.
– p. 15/20

Historique
Banc ClassiqueCommande linéarisante
dans le cadre d’une Thèse soutenue en 2001Performance H2/H∞
Commande vectorielleRotoriqueStatorique,
D.E.A. sur le problème de la S.F.O.C. en basse vitesse
– p. 16/20

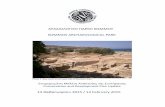
Carte F.P.G.A.
– p. 17/20

Capteurs
– p. 18/20

Capteurs
– p. 19/20