EXAMEN PARCIAL -2014I - Welcome to GMSM -...
6
UNIVERSIDAD NACIONAL DE INGENIER ´ IA - FIM MT 227 Control Moderno y ´ Optimo EXAMEN PARCIAL - 2014I Problema 1: Un tanque vacio con masa m o es posicionado sobre un resorte lineal con rigidez k. El tanque es estable en y o = 0 y solo se puede mover verticalmente. La fuerza del resorte es definida tal que F k (y o ) = 0. La densidad del agua bombeada al tanque es ρ, con flujo volum´ etrico variable ˙ V i (t)= ˙ V max - Cy(t). La electr´ onica de la bomba puede cambiar apropiada- mente el flujo volum´ etrico que ingresa al tanque de- pendiendo de la posici´on y(t) medida por el sensor. La masa de las tuberias unidas al tanque adem´ as de la propia masa del tanque est´an consideradas en m o . Una v´alvula a la salida del tanque puede ser ajus- tada y es considerada como la entrada u(t)= ˙ V out (t) del sistema. k ˙ V out g y(t) y 0 ˙ V in Sensor P ump Fig.(1) Tanque llenandose de agua. 1. (2 ptos) Calcular las ecuaciones diferenciales que describen el movimiento vertical del tanque. Usar z 1 = y(t), z 2 =˙ y(t)y z 3 = m tanque (t) como estados. La entrada al sistema es u(t)= ˙ V out (t) y la salida (se˜ nal medida) es w(t)= y(t). Escribir las ecuaciones en la forma espacio de estados, incluyendo ecuaci´ on de salida. Ayuda: Recordar la ley de conservaci´ on de masa: ˙ m(t)= ˙ m in (t) - ˙ m out (t), y que m(t)= ρV (t). 2. (1 pto) El tanque tiene que mantenerse en equilibrio a la distancia y e , tal que la masa total permanezca en m e . ¿Qu´ e valor de se˜ nal de entrada u es requerida para este prop´ osito. 3. (2 ptos) Linealizar las ecuciones diferenciales con respecto al punto de equilibrio anterior. Representar las ecuaciones en la forma espacio de estados est´andar con matrices del sistema {A,B,C,D}. Problema 2: Considerar un sistema de potencia el´ ectrica con componentes v´alvula-turbina-generador, la entrada de control es el ingreso de combustible u(t) y salida controlada es la velocidad angular del generador ω G (t). El proceso f´ ısico es definido por un modelo normalizado en tiempo continuo como sigue: J ˙ ω G + Dω G = P T - P L τ u ˙ P T = -P T + K t u , donde J, D, τ u son el momento de inercia del generador, coeficiente de amortiguamiento del generador, y constante de tiempo de la turbina. Las variables de estado son ω G y P T , y corresponden a la frecuencia del generador y potencia de la turbina. P L representa la potencia consumida por la carga y K t es el coeficiente de la posici´on de la v´alvula. Sean J = 1, D =0.05, τ u =0.1y K t =0.5. 1. (2 ptos) Calcular las ganancias K y k r de la ley de control u(t)= -K ω G (t) P T (t) + k r ω ref G (t) que permite regular la frecuencia del generador en un valor constante. Asumir que todos los estados son medidos. Ubicar los polos del sistema controlado en s = {-3, -4}. 2. (2 ptos) Siendo que la ley de control anterior es muy dependiente del modelo usado, calcular la din´ amica del controlador considerando efecto integral y presentar el diagrama de bloques de la implementaci´ on. Asumir realimentaci´ on de estados. Ubicar el polo adicional en s = {-5}.
Transcript of EXAMEN PARCIAL -2014I - Welcome to GMSM -...

UNIVERSIDAD NACIONAL DE INGENIERIA - FIM
MT 227 Control Moderno y Optimo
EXAMEN PARCIAL - 2014I
Problema 1:
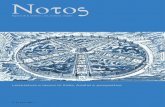
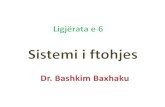
Un tanque vacio con masa mo es posicionado sobreun resorte lineal con rigidez k. El tanque es estableen yo = 0 y solo se puede mover verticalmente. Lafuerza del resorte es definida tal que Fk(yo) = 0.La densidad del agua bombeada al tanque es ρ, conflujo volumetrico variable Vi(t) = Vmax−Cy(t). Laelectronica de la bomba puede cambiar apropiada-mente el flujo volumetrico que ingresa al tanque de-pendiendo de la posicion y(t) medida por el sensor.La masa de las tuberias unidas al tanque ademasde la propia masa del tanque estan consideradas enmo.Una valvula a la salida del tanque puede ser ajus-tada y es considerada como la entrada u(t) = Vout(t)del sistema.
k
Vout
g
y(t)
y0
Vin
Sensor
Pump
Fig.(1) Tanque llenandose de agua.
1. (2 ptos) Calcular las ecuaciones diferenciales que describen el movimiento vertical del tanque.Usar z1 = y(t), z2 = y(t) y z3 = mtanque(t) como estados. La entrada al sistema es u(t) = Vout(t)y la salida (senal medida) es w(t) = y(t). Escribir las ecuaciones en la forma espacio de estados,incluyendo ecuacion de salida.
Ayuda: Recordar la ley de conservacion de masa: m(t) = min(t)− mout(t), y que m(t) = ρV (t).
2. (1 pto) El tanque tiene que mantenerse en equilibrio a la distancia ye, tal que la masa totalpermanezca en me. ¿Que valor de senal de entrada u es requerida para este proposito.
3. (2 ptos) Linealizar las ecuciones diferenciales con respecto al punto de equilibrio anterior.Representar las ecuaciones en la forma espacio de estados estandar con matrices del sistema{A,B,C,D}.
Problema 2:
Considerar un sistema de potencia electrica con componentes valvula-turbina-generador, la entradade control es el ingreso de combustible u(t) y salida controlada es la velocidad angular del generadorωG(t). El proceso fısico es definido por un modelo normalizado en tiempo continuo como sigue:
JωG +DωG = PT − PL
τuPT = −PT +Ktu,
donde J,D, τu son el momento de inercia del generador, coeficiente de amortiguamiento del generador, yconstante de tiempo de la turbina. Las variables de estado son ωG y PT , y corresponden a la frecuenciadel generador y potencia de la turbina. PL representa la potencia consumida por la carga y Kt es elcoeficiente de la posicion de la valvula. Sean J = 1, D = 0.05, τu = 0.1 y Kt = 0.5.
1. (2 ptos) Calcular las ganancias K y kr de la ley de control u(t) = −K
[ωG(t)PT (t)
]
+krωrefG (t) que
permite regular la frecuencia del generador en un valor constante. Asumir que todos los estadosson medidos. Ubicar los polos del sistema controlado en s = {−3,−4}.
2. (2 ptos) Siendo que la ley de control anterior es muy dependiente del modelo usado, calcular ladinamica del controlador considerando efecto integral y presentar el diagrama de bloques de laimplementacion. Asumir realimentacion de estados. Ubicar el polo adicional en s = {−5}.

UniversidaFacultad deDAIA 3. (1 pto) integral. Problem
Sea el sisLa dinámecuacione
s22
21
x
xx
Se deseaángulo x1
pasos: 1. (1pto)
Espaci
Con x2. (1pto)3. (2ptos
dobles4. (2ptos
estima5. (1pto)
determcon en
6. (1ptoconsta
7. (2ptos=2, ilazo ceecuaciretroaldirecta
ad Nacional dee Ingeniería M
Presentar la
ma 3
stema de pénmica del es diferenci
cin 21 ux
a diseñar u1 del péndul
) Linealice aio Estado:
= [x1,x2]T. S
) ¿Es estables) Demuestrs en -1. Detes) Demuestración A-LC) ¿El principminar el comntrada y y sa) Determine
ante. s) Solo paramplemente errado deteión del comlimentacióna. Considere
e Ingeniería Mecánica
implementa
ndulo-carrosubsistema
iales.
,cos 1 x
un compenlo, para lo
alrededor de
Cxy
Axx
Se mide el áe el subsistere que es poermine la gare que es po. Calcule lapio de separmpensador? alida u. e la gananci
a esta pregunla ecuación
erminando empensador Gn y Gur(s) ene una entrad
ción en Matl
o como se m"péndulo"
0
nsador que cual se deb
e {x1,x2}={0
Bu
ángulo x1 y uema en Lazoosible posicianancia de R
osible posicia ganancia Lración en esJustifique u
ia de alimen
nta considern del Sistemen la Fig. 3
Guy(s) en la n la alimentda constante
lab/Simulink
muestra en la" está dad
permita cbe seguir lo
0,0}(punto
u es una fueo abierto? ionar el sistRetroalimenionar los va
L. ste caso da rusando los v
ntación dire
rar ma en
la
tación e r(t) .
k del sistema
a Fig. 2 da por las
controlar els siguientes
de equilibri
erza externa
tema de lazontación K.alores propio
resultados svalores prop
ecta kr o Nb
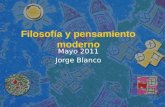
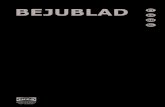
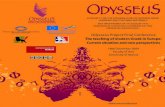
Fig 3
P.A
de control in
s
l s
io) y encuen
a.
o cerrado co
os en -1 de
atisfactoriopios de la m
ar para segu
3 Modelo del S
A. 2014-1 15/03/14
ncluyendo ef
ntre la form
on valores p
la matriz de
os en el disematriz del co
uir una refe
La
Fig 2
Sistema de Con
fecto
ma de
propios
el error de
ño al ompensador
erencia
as Profesoras
2 péndulo-car
ntrol del Péndu
r
s
rro
ulo

UniversidaFacultad deDAIA Problema
ad Nacional dee Ingeniería M
a 1
e Ingeniería Mecánica
P.A
A. 2014-1 15/03/14

UniversidaFacultad deDAIA Problem
ad Nacional dee Ingeniería M
ma 2
e Ingeniería Mecánica
P.A
A. 2014-1 15/03/14

UniversidaFacultad deDAIA
Problema
a) A
b) Lode
c) Po
C
de
K
d) o
ob
L
L
e)Ma
ad Nacional dee Ingeniería M
3
0
102
A
os polos del erecho.
olinomio des
02
Co
el retro-alime
]10[ CoK
10
01b
bservador de
1
2
0[
2L
KL T
atriz del Com
e Ingeniería Mecánica
B=
2
0
sistema en la
seado; ( sdes
1
2 Ran
entador de es
1 )(Ao des
Rango(ob)
e estados com
]1 1Ob d
mpensador A
C= 01
azo abierto e
2) 2 sss
ngo(Co) =2
stados compl
0]10[
=2
mpletos
0[)(ATT
es
Ac=A-BK-LC
es: s=± es
1
co
leto
2
2
01
10
completam
10
01]10
C
inestable, pr
ompletament
22
2
2
1
mente observ
2
1
1
0 2
P.A
resenta un po
te Controlabl
2
1
1
2
vable, si es po
2
1
22
2
A. 2014-1 15/03/14
olo en el sem
le, si es posib
2
2 21
osible el dise
12 2T
mi plano
ble el diseño
2
2
eño del
o

UniversidaFacultad deDAIA
A
Po2s
2sCoesse
1s
f)
g)
ad Nacional dee Ingeniería M
0
102cA
olinomio car
(4 22
s
42 somo 0 , stable, por loerá satisfacto
422,1
Kr=-1/2
) 2s
Guy
e Ingeniería Mecánica
02
racterístico:
5)1(0
2
0
siempre va ao que el diseñorio.
4
104
5 441
s
s
1
2
2
0
a ser asintóticño del compe
y 22
sGur
222
camente ensador
10449
21
s
s
011
22
P.A
(
222
A. 2014-1 15/03/14
1)1
12
2