Enhancing a Simple MODIS Cloud Mask Algorithm for the Landsat Data Continuity Mission
9
IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 51, NO. 2, FEBRUARY 2013 723 Enhancing a Simple MODIS Cloud Mask Algorithm for the Landsat Data Continuity Mission Michael J. Wilson and Lazaros Oreopoulos Abstract—The upcoming Landsat Data Continuity Mission (LDCM) will include new channels centered around 1.38 μm and 12 μm. This work studies the potential impact of these new chan- nels on LDCM’s cloud detection capabilities by using MODerate resolution Imaging Spectroradiometer (MODIS) data as a proxy. Thresholds for the 1.38 μm band and the so-called “split window” technique (using the brightness temperature difference of bands centered at 11 μm and 12 μm) are derived using atmospheric profiles from the ECMWF ERA-40 reanalysis and a MODIS-band radiance simulator. The thresholds are incorporated into a pre- viously published cloud mask scheme and applied on low- and mid-latitude (60 ◦ S to 60 ◦ N) MODIS radiance data from two different days, six months apart. While the previous scheme yields agreement rates to the MODIS cloud mask just below 80%, the addition of the 1.38 μm and split window tests increases the agree- ment by 7–9%. The earlier scheme is still appropriate for cloud masking of historical Landsat images and for carrying consistent cloud detection into the future. The enhanced scheme of this paper, on the other hand, with its improved masking of primarily high thin clouds, can be either used independently or combined with other masking techniques for generating reliable LDCM cloud mask products that can potentially include confidence indicators based on the degree of agreement between multiple cloud masks. Index Terms—Atmospheric modeling, clouds, Earth observing system, infrared image sensors, land surface, remote sensing. I. I NTRODUCTION C LOUDS in Landsat imagery frequently obscure land fea- tures, the mission’s prime target of interest. To date, only rudimentary information about clouds in Landsat-7 scenes has been provided in the form of cloud “scores” (cloud fractions) for the entire scene and each of its four quadrants. These cloud scores come from the Automated Cloud Cover Assessment (ACCA) algorithm [1]. The ACCA cloud scores help users screen for scenes with low degree of overall cloud obscuration and are used in the long-term acquisition plan algorithm of the mission to help determine whether a scene outside the contigu- ous USA should be acquired at the next available opportunity [2]. ACCA has the capability to provide a pixel-level cloud Manuscript received September 22, 2011; revised January 17, 2012; accepted June 3, 2012. Date of publication July 24, 2012; date of current version January 17, 2013. This work was supported by the U.S. Geological Survey under Contract 06CRCN0022. M. J. Wilson was with Joint Center for Earth Systems Technology, University of Maryland Baltimore County, Baltimore, MD 21250, USA and was also with Climate and Radiation Laboratory, NASA Goddard Space Flight Center, Green- belt, MD 20771 USA. He is currently with I.M. Systems Group, Rockville, MD 20852 USA (e-mail: [email protected]). L. Oreopoulos is with Climate and Radiation Laboratory, NASA God- dard Space Flight Center, Greenbelt, MD 20771 USA (e-mail: Lazaros. [email protected]). Digital Object Identifier 10.1109/TGRS.2012.2203823 mask (e.g., Oreopoulos et al. [3]), but has not been routinely used in this capacity. The upcoming Landsat Data Continuity Mission (LDCM, http://ldcm.usgs.gov), on the other hand, seeks to develop a pixel-level cloud mask product. The combination of two instru- ments aboard LDCM, the Operational Land Imager (OLI) and the Thermal InfraRed Sensor (TIRS), will include not only the channels currently on the Landsat-5 and Landsat-7 satellites, but will also provide additional channels centered at 0.443 μm (OLI), 1.38 μm (OLI), and 12 μm (TIRS). The 1.38 μm band and two thermal bands at 11 and 12 μm are expected to enhance LDCM’s ability to detect high clouds [4], [5]. This paper presents a cloud masking scheme that improves upon a previous scheme designed for historical Landsat data by taking advantage of the new channels of the LDCM. The cloud detection scheme that is enhanced is a modification of the scheme first introduced by Luo et al. [6] (hereafter the “origi- nal” LTK scheme) as described in Oreopoulos et al. [3] (here- after the “modified” LTK scheme). The original LTK scheme is a decision-tree algorithm that uses only visible and shortwave near-infrared bands and was developed to operate on mid- latitude MODIS observations over land. With similar bands being present on the Thematic Mapper (TM) of Landsat-5 and Enhanced TM Plus (ETM+) of Landsat-7, Oreopoulos et al. [3] demonstrated that a slightly modified version of the algorithm exhibited significant skill in pixel classification (clear versus cloudy) for a collection of manually-masked Landsat scenes. The work in this paper seeks to incorporate the 1.38 μm and thermal channels into the modified LTK scheme to produce an “enhanced” LTK scheme. Since no Landsat data with these new bands are currently available for algorithm evaluation, we use MODerate resolution Imaging Spectroradiometer (MODIS) data as a proxy. Moreover, in the absence of a MODIS manual cloud mask, we use the official MODIS cloud mask (MOD35 product) as the cloud “truth.” The sections that follow describe the development of the enhanced algorithm, including the meth- ods used to determine thresholds for the new spectral tests, and provide metrics that demonstrate its improved performance when applied to MODIS data. II. BACKGROUND ON ALGORITHMS The original LTK scheme suggested by Luo et al. [6] takes advantage of known spectral variations of certain surface types to classify pixels using MODIS Bands 1, 2, 3, and 6 (620–670 nm, 841–876 nm, 459–479 nm, and 1628–1652 nm, respectively; see Table I). The scheme applies a series of thresh- old tests to identify pixels as non-vegetated land, snow/ice, water bodies, or cloud. Any pixels that do not pass the 0196-2892/$31.00 © 2012 IEEE
Transcript of Enhancing a Simple MODIS Cloud Mask Algorithm for the Landsat Data Continuity Mission

IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 51, NO. 2, FEBRUARY 2013 723
Enhancing a Simple MODIS Cloud Mask Algorithmfor the Landsat Data Continuity Mission
Michael J. Wilson and Lazaros Oreopoulos
Abstract—The upcoming Landsat Data Continuity Mission(LDCM) will include new channels centered around 1.38 μm and12 μm. This work studies the potential impact of these new chan-nels on LDCM’s cloud detection capabilities by using MODerateresolution Imaging Spectroradiometer (MODIS) data as a proxy.Thresholds for the 1.38 μm band and the so-called “split window”technique (using the brightness temperature difference of bandscentered at 11 μm and 12 μm) are derived using atmosphericprofiles from the ECMWF ERA-40 reanalysis and a MODIS-bandradiance simulator. The thresholds are incorporated into a pre-viously published cloud mask scheme and applied on low- andmid-latitude (60◦ S to 60◦ N) MODIS radiance data from twodifferent days, six months apart. While the previous scheme yieldsagreement rates to the MODIS cloud mask just below 80%, theaddition of the 1.38 μm and split window tests increases the agree-ment by 7–9%. The earlier scheme is still appropriate for cloudmasking of historical Landsat images and for carrying consistentcloud detection into the future. The enhanced scheme of this paper,on the other hand, with its improved masking of primarily highthin clouds, can be either used independently or combined withother masking techniques for generating reliable LDCM cloudmask products that can potentially include confidence indicatorsbased on the degree of agreement between multiple cloud masks.
Index Terms—Atmospheric modeling, clouds, Earth observingsystem, infrared image sensors, land surface, remote sensing.
I. INTRODUCTION
C LOUDS in Landsat imagery frequently obscure land fea-tures, the mission’s prime target of interest. To date, only
rudimentary information about clouds in Landsat-7 scenes hasbeen provided in the form of cloud “scores” (cloud fractions)for the entire scene and each of its four quadrants. These cloudscores come from the Automated Cloud Cover Assessment(ACCA) algorithm [1]. The ACCA cloud scores help usersscreen for scenes with low degree of overall cloud obscurationand are used in the long-term acquisition plan algorithm of themission to help determine whether a scene outside the contigu-ous USA should be acquired at the next available opportunity[2]. ACCA has the capability to provide a pixel-level cloud
Manuscript received September 22, 2011; revised January 17, 2012; acceptedJune 3, 2012. Date of publication July 24, 2012; date of current versionJanuary 17, 2013. This work was supported by the U.S. Geological Surveyunder Contract 06CRCN0022.
M. J. Wilson was with Joint Center for Earth Systems Technology, Universityof Maryland Baltimore County, Baltimore, MD 21250, USA and was also withClimate and Radiation Laboratory, NASA Goddard Space Flight Center, Green-belt, MD 20771 USA. He is currently with I.M. Systems Group, Rockville, MD20852 USA (e-mail: [email protected]).
L. Oreopoulos is with Climate and Radiation Laboratory, NASA God-dard Space Flight Center, Greenbelt, MD 20771 USA (e-mail: [email protected]).
Digital Object Identifier 10.1109/TGRS.2012.2203823
mask (e.g., Oreopoulos et al. [3]), but has not been routinelyused in this capacity.
The upcoming Landsat Data Continuity Mission (LDCM,http://ldcm.usgs.gov), on the other hand, seeks to develop apixel-level cloud mask product. The combination of two instru-ments aboard LDCM, the Operational Land Imager (OLI) andthe Thermal InfraRed Sensor (TIRS), will include not only thechannels currently on the Landsat-5 and Landsat-7 satellites,but will also provide additional channels centered at 0.443 μm(OLI), 1.38 μm (OLI), and 12 μm (TIRS). The 1.38 μm bandand two thermal bands at 11 and 12 μm are expected to enhanceLDCM’s ability to detect high clouds [4], [5].
This paper presents a cloud masking scheme that improvesupon a previous scheme designed for historical Landsat databy taking advantage of the new channels of the LDCM. Thecloud detection scheme that is enhanced is a modification of thescheme first introduced by Luo et al. [6] (hereafter the “origi-nal” LTK scheme) as described in Oreopoulos et al. [3] (here-after the “modified” LTK scheme). The original LTK scheme isa decision-tree algorithm that uses only visible and shortwavenear-infrared bands and was developed to operate on mid-latitude MODIS observations over land. With similar bandsbeing present on the Thematic Mapper (TM) of Landsat-5 andEnhanced TM Plus (ETM+) of Landsat-7, Oreopoulos et al. [3]demonstrated that a slightly modified version of the algorithmexhibited significant skill in pixel classification (clear versuscloudy) for a collection of manually-masked Landsat scenes.
The work in this paper seeks to incorporate the 1.38 μmand thermal channels into the modified LTK scheme to producean “enhanced” LTK scheme. Since no Landsat data with thesenew bands are currently available for algorithm evaluation, weuse MODerate resolution Imaging Spectroradiometer (MODIS)data as a proxy. Moreover, in the absence of a MODIS manualcloud mask, we use the official MODIS cloud mask (MOD35product) as the cloud “truth.” The sections that follow describethe development of the enhanced algorithm, including the meth-ods used to determine thresholds for the new spectral tests,and provide metrics that demonstrate its improved performancewhen applied to MODIS data.
II. BACKGROUND ON ALGORITHMS
The original LTK scheme suggested by Luo et al. [6]takes advantage of known spectral variations of certain surfacetypes to classify pixels using MODIS Bands 1, 2, 3, and 6(620–670 nm, 841–876 nm, 459–479 nm, and 1628–1652 nm,respectively; see Table I). The scheme applies a series of thresh-old tests to identify pixels as non-vegetated land, snow/ice,water bodies, or cloud. Any pixels that do not pass the
0196-2892/$31.00 © 2012 IEEE

724 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 51, NO. 2, FEBRUARY 2013
TABLE ICORRESPONDENCE BETWEEN MODIS, LANDSAT-7 ETM+, AND LDCM OLI/TIRS BANDS
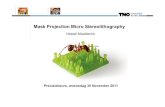
Fig. 1. Flow chart of the LTK pixel classification scheme. The unshaded region shows the LTK algorithm as modified by Oreopoulos et al. [3]. The shadedregion shows the inclusion of additional spectral tests for the enhanced LTK version.
tests for these categories are classified as vegetated land.Oreopoulos et al. [3] recognized that similar bands are avail-able in the Landsat missions and applied the algorithm to acollection of 156 manually masked Landsat-7 scenes (a subsetof 212 scenes used by Irish et al. [1]). They found that byemploying three minor modifications, the algorithm’s perfor-mance improved so that clear and cloudy pixels were correctlydistinguished ∼93% of the time. Such a level of agreementcompares favorably to ACCA which includes thermal infraredtests in addition to tests on various combinations of ETM+solar reflectances. The modified LTK algorithm is shown in theunshaded part of Fig. 1 using LDCM OLI band designations;Table I shows the correspondence between MODIS, Landsat-7ETM+, and LDCM OLI/TIRS bands.
With the additional bands of LDCM, further improvementscan be introduced to the LTK scheme, particularly for thincloud detection, a weakness of the scheme identified byOreopoulos et al. [3]. The 1.38 μm band was designed forthe detection of high clouds such as cirrus [4], [7]. Becauseof the strong water vapor absorption at this wavelength, high
clouds, for which the above-cloud two-way water vapor pathis small, appear relatively bright in 1.38 μm imagery. Brightsurfaces in very dry environments (e.g., polar regions) can alsobe frequently distinguished and can therefore be misidentifiedas clouds, but in general, low clouds and surfaces in mostenvironments appear dark (i.e., they contribute near zero to thetop of the atmosphere 1.38 μm reflectance). Later, in this paper,we will describe our own method of determination of a singleglobal threshold for distinguishing between clear and high thincloud pixels with the 1.38 μm band. In addition to this band,LDCM allows the implementation of another technique that iseffective in thin cloud and cloud edge detection, the so-called“split window” technique [5], [8]. Ice clouds of low to moderateoptical thickness absorb and scatter less at 11 μm than at 12 μm,so their transmittances are higher at 11 μm; this yields higherbrightness temperatures at 11 μm (T11) than at 12 μm (T12),with the amount of the T11–T12 difference (“split”) also depen-dent on the amount of column water vapor. In this paper, splitwindow differences are assigned thresholds that depend on the11 μm brightness temperature.

WILSON AND OREOPOULOS: ENHANCING A SIMPLE MODIS CLOUD MASK ALGORITHM 725
The additional 1.38 μm and split window thresholds are usedhere to improve upon the modified LTK scheme by reclassi-fying as cloudy a subset of the pixels originally classified asclear. Throughout the paper, we refer to the new algorithm asthe “enhanced” LTK scheme.
III. DERIVATION OF MODIS/LDCM BAND
THRESHOLDS FROM SIMULATIONS
The specific thresholds for the 1.38 μm and split win-dow tests of the enhanced LTK were determined with theaid of a special version of the discrete ordinates radiativetransfer (DISORT) code described by Ham et al. [9] andSohn et al. [10] applied on atmospheric profiles obtainedfrom European Centre for Medium-Range Weather Forecasts(ECMWF) ERA-40 reanalysis data. The RT code was designedto simulate MODIS radiances via incorporation of a packagethat calculates molecular absorption optical depths accordingto the correlated-k distribution implementation of Kratz [11]. Asingle “snapshot” of ECMWF ERA-40 reanalysis data at 2.5◦
resolution contains over 10 000 profiles that encompass a widevariety of horizontal and vertical water vapor and temperaturevariations over the earth’s climate zones. We arbitrarily chosethe data for January 15, 2002 at 1200 Z. This data includedatmospheric temperature, pressure, moisture, and geometricalheight for 23 vertical levels. Because in an equal-angle gridhigh latitude grid boxes get a weighting disproportional tothe area they occupy, a spatial interpolation filter akin to thatused by the International Satellite Cloud Climatology Project(ISCCP, http://isccp.giss.nasa.gov/docs/mapgridinfo.html) wasapplied to create 6454 (280 km)2 equal-area grid boxes. The6454 profiles were then used to generate clear-sky simulationsof reflectances for MODIS bands 1, 2, 3, 6, and 26 (LDCMbands 4, 5, 2, 6, and 9, respectively; see Table I) and brightnesstemperatures for MODIS bands 31 and 32 (LDCM bands 10and 11, respectively).
Cloudy-sky profiles were also constructed for a variety ofice particle sizes and concentrations at different levels in theatmosphere. Clouds were placed in atmospheric layers with toppressures of 100 hPa, 150 hPa, 200 hPa, 250 hPa, 300 hPa,and 400 hPa, corresponding to discrete levels in the ECMWFERA-40 reanalysis data. The pressure thickness of the cloudswas the same as the thickness of the atmospheric layer itbelonged to. For pressure tops between 100 hPa and 250 hPa,clouds occupied layers 50 hPa thick. For pressure tops at300 hPa or 400 hPa, clouds occupied layers 100 hPa thick.The clouds were assigned optical depths of 0.1, 0.3, 0.5, 0.75,1, 2, 3, and 4, and particles with effective ice diameters of40, 70, and 100 μm. All cloud top pressure, optical depth,and effective ice diameter combinations were generated foreach of the 6454 profiles, with only one cloud layer presentat a time. The resulting profiles were then inserted into themodified DISORT algorithm [9], [10]. For the 1.38 μm band,the solar zenith angle was fixed at 30◦ (tests showed that inmost cases the reflectance sensitivity was small for the typical30◦–60◦ range of LDCM), and the surface albedo was fixed at0.25, a value close to that expected for a wide range of non-ice land surfaces. For the thermal band simulations, the surface
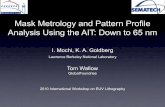
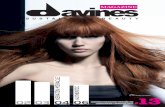
Fig. 2. Curve indicating the brightness temperature difference T11–T12 thatseparates clear from cloudy pixels as a function of 11 μm brightness tempera-ture T11. Values above the curve indicate cloudy pixels, while values below thecurve indicate clear pixels. The cluster of gray points represents the values of(T11, T11–T12) pairs for all 6454 clear-sky gridpoints in our radiative transfersimulations.
emissivity was set to 1 for both the 11 and 12 μm bands. Thephase functions for the assumed particle size distributions wereprovided internally by the RT simulation tool.
Extensive testing showed that to determine an appropriate1.38 μm threshold, it was best to use the simulated reflectancesfor cloud optical thicknesses of 1, 2, 3, and 4. The desiredthreshold was identified by finding the reflectance correspond-ing to the lowest 1% of simulated cloudy-sky reflectances.The threshold reflectance derived this way corresponds to avalue of 0.0113. By design, when using this threshold, only1% of our cloudy simulations are misclassified as clear. Whenthe threshold was applied to our separate subset of clear-skysimulations, approximately 93.7% of the clear simulations werebelow the threshold and therefore classified correctly. Had weincluded the simulations with optical depths less than 1, alower threshold value would have captured 99% of the cloudyprofiles. This would have resulted in more incorrectly classifiedclear profiles. To keep the number of correctly classified clearprofiles above 90%, we would then have had to relax therequirement of only 1% cloud misclassifications. Also, note thatover oceans, where the surface reflectance is lower than 0.25,the threshold determined with the above method would misssome high thin clouds.
To determine the threshold of the split window technique,only clear-sky simulations of 11 and 12 μm brightness temper-ature were used. The values of the (T11, T11–T12) pairs forour clear-sky simulations are shown as gray points in Fig. 2.Cloudy simulations generally exhibit larger values of T11–T12for the same T11, so the T11-dependent threshold of T11–T12can be determined by finding the upper envelope of the clusterof gray points. In practice, the upper envelope was foundas follows: The T11 brightness temperatures were sorted into1 K bins. The largest T11–T12 difference within each T11 binwas assigned as the bin T11–T12 threshold. If this threshold fellbelow 0.05 K, then the threshold was set to 0.05. In addition,the curve was smoothed such that each T11 bin’s T11–T12

726 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 51, NO. 2, FEBRUARY 2013
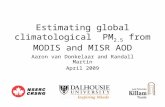
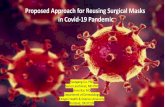
Fig. 3. Cloud fraction on January 15, 2002 from the MOD35 cloud masking algorithm (top) versus cloud fraction from the enhanced LTK scheme (bottom).Both maps are gridded at a resolution of 1◦ latitude by 1◦ longitude. Only pixels between 60◦ N and 60◦ S are included in these images. However, the land/watermask is provided in the polar regions for reference.
threshold was always equal or greater than the threshold ofthe preceding bin. This resulted in a monotonically increasingcurve beginning at 0.05 K and rising to a maximum near 2.8 K,as shown in Fig. 2. Any pair (T11, T11–T12) below this curveis considered clear, and any pair above the curve is considered
cloudy. The thresholds represented by this curve capture ∼99%of our clear-sky simulations correctly. When applied to thecloudy simulations, ∼94% of profiles with clouds of opticalthicknesses equal to 0.5 or greater were also classified correctly.The percentage of correctly classified profiles increases as

WILSON AND OREOPOULOS: ENHANCING A SIMPLE MODIS CLOUD MASK ALGORITHM 727
clouds get thicker: for an optical depth of 3, 99.4% of cloudsare correctly classified, as opposed to only 80% of clouds beingcorrectly classified for an optical depth of 0.5. The skill of thedetection with the above thresholds also improves as the cloudtop pressure decreases (i.e., higher clouds). A similar curve isused for the split-window test of the operational MODIS maskalgorithm [12], but our tests showed that our own curve worksbetter within the confines of the enhanced LTK algorithm.Finally, we found that when the above threshold selectionmethodology was applied to the ensemble of atmospheric pro-files from a different date (July 15) of the ECMWF ERA-40reanalysis data, the resulting thresholds were very close to thosefound from the January profiles.
IV. DERIVATION AND TESTING OF THE
ENHANCED LTK SCHEME
A. Derivation of Scheme From MODIS Data
The thresholds determined through radiative simulations onthe ECMWF ERA-40 reanalysis data were applied to theMODIS MOD021KM product, which contains radiances at1-km resolution that can be converted to reflectances andbrightness temperatures. The study used only MODIS-Terradata since the morning orbit of Terra closely corresponds to thatof the current and future Landsat missions. The study was alsoconfined to data points equatorward of 60◦ to avoid most of theareas of snow/ice cover where the LTK scheme is not expectedto perform as well, and non-illuminated areas of the winter(northern) hemisphere where the scheme cannot be applied.For the more challenging cloud detection locations at latitudeshigher than 60◦, alternative cloud masking techniques shouldbe applied. In total, 108 granules during January 15th, 2002contained daylight pixels with data points equatorward of 60◦.
The enhancement of the LTK scheme with the aid of theadditional LDCM bands was established as follows. The mod-ified LTK algorithm was used to classify the MODIS pixelsinto non-vegetated land, snow/ice, water bodies, vegetated land,or clouds, as usual. Each pixel was then retested using thesplit window and 1.38 μm thresholds. Clear LTK pixels werechanged to cloudy according to the following two tests: 1) bothsplit window and 1.38 μm thresholds designated the pixelcloudy, and 2) either the split window or the 1.38 μm thresholddesignated the pixel cloudy. Similarly, LTK cloudy pixels werechanged to clear when both thresholds indicated clear or wheneither threshold indicated clear. The results of the above LTKenhancement tests were then compared against the MODIScloud mask in order to choose the best test or combinationof tests.
The MOD35 product provides an overall cloud mask calledthe Unobstructed FOV Confidence Flag that categorizes each1-km pixel as cloudy, uncertain/probably cloudy, probablyclear, or confidently clear [12], [13]. The first two categories,cloudy and uncertain/probably cloudy, were combined as asingle cloudy category, while the probably clear and confidentlyclear categories were also combined into a single clear category.Given the unavailabilty of a manual mask as in [3], it is thisbinary clear/cloud mask that provided the “truth” mask againstwhich the various LTK scenarios were tested. While this is
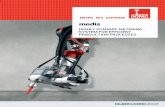
Fig. 4. Zonal (longitudinally averaged) cloud fraction at 1◦ resolution cor-responding to Fig. 4. The zonal cloud fraction from the modified LTK ofOreopoulos et al. [3] is also shown for reference.
nonideal, the evidence provided in [13], gives sufficient con-fidence that the large number of spectral tests applied to derivethe MOD35 clear-cloudy discrimination results in a cloud maskthat is fairly reliable in most situations.
The best improvement in the modified LTK algorithm overwater bodies was achieved when implementing either the splitwindow or the 1.38 μm thresholds to reclassify clear pixelsas cloudy (an improvement of 7.03%). Improvements werealso achieved when either threshold reclassified snow/ice pix-els as cloudy (an improvement of 1.05%) and when boththresholds reclassified non-vegetated land pixels as cloudy (animprovement of 0.18%). The additional tests did not improveLTK agreement with MOD35 for vegetated land pixels, i.e.,more vegetated pixels were incorrectly classified as clouds thanmisclassified vegetated pixels corrected to cloudy. Moreover,no performance improvement gains were obtained when cloudypixels were re-assigned to clear. Based on the above, the mod-ified LTK scheme was enhanced as shown in the highlightedpart of Fig. 1, namely, non-vegetated land pixels are changedto cloudy when both thresholds are satisfied, and water andsnow/ice pixels are changed to cloudy when either threshold issatisfied. When the thresholds are not satisfied, pixels fall backto their respective original classifications. Cloudy and vegetatedpixels are not tested.
B. Near-Global Performance of Scheme
Fig. 3 contrasts maps of cloud fraction aggregated into1◦ grid boxes for the MOD35 algorithm and the enhanced LTKfor the 60◦ N to 60◦ S latitude zone on January 15, 2002. Theenhanced LTK shows the same general pattern as MOD35 buttends to underpredict cloud cover, particularly in the AtlanticOcean and Pacific Ocean between 10◦ and 30◦ N and theEastern Pacific Ocean near the equator. Fig. 4 compares thezonally averaged cloud fraction derived from the enhanced LTKand MOD35. By also displaying the zonal cloud fraction bythe modified LTK of Oreopoulos et al. [3] in the same figure,the improvements owing to the additional tests of the enhancedversion become apparent. Since the enhanced LTK does notreclassify cloudy pixels as clear, the enhanced LTK is alwaysat least as cloudy as the modified LTK. The largest differences

728 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 51, NO. 2, FEBRUARY 2013
TABLE IIPERFORMANCE OF THE TWO FLAVORS OF THE LTK SCHEME
in cloud cover between the modified LTK and the enhancedLTK occur between 20◦ S and 10◦ N, where tropical cirrusclouds are most prevalent. The largest differences between theenhanced LTK and MOD35 occur between 5◦ S and 25◦ N,mainly in the regions highlighted earlier in the description ofFig. 3. The midlatitudes in both hemispheres tend to generallyshow fair agreement in cloud fraction between MOD35, theenhanced LTK, and the modified LTK. The domain-averagecloud fractions for the entire 60◦ S to 60◦ N latitude zone are68.7% for MOD35, 59.5% for enhanced LTK, and 48.6% formodified LTK. These results indicate that with a more limitedarsenal of spectral tests, the enhanced LTK inevitably missesa substantial fraction of cloudy pixels detected by the moresophisticated MODIS cloud mask, but nonetheless improvessignificantly the performance of the previous version of LTK.
The MOD06 product includes retrievals of cloud top pres-sures at a 5-km resolution. This product was used to classifyany MOD35 cloudy pixels falling within a MOD06 cloud toppressure retrieval into three categories: high clouds (with cloudtops < 400 hPa), mid-level clouds (with tops ≥ 400 hPa and< 850 hPa), and low clouds (with cloud tops ≥ 850 hPa).Table II shows the performance of the modified LTK andenhanced LTK schemes relative to the MOD35 cloud maskproduct. Cloud detection performance is also broken downby cloud height category as determined by the MOD06 cloudpressure product. The split window and 1.38 μm tests improvethe overall performance of the enhanced LTK over the mod-ified LTK by nearly 8.7%. Correct cloud detection improvesby nearly 15% with the enhanced LTK, while clear pixeldetection only decreases by about 4.4%. The most dramaticimprovements in cloud detection occur for high clouds (24%),while mid-level clouds improve by about 7%, and low cloudsimprove by about 16%. The enhanced LTK captures over95% of the high and mid-level clouds detected by MODIS.However, low clouds are still a weakness of the algorithm,with only ∼60% of low level clouds correctly classified bythe enhanced LTK, despite the 16% improvement. We arenot certain at this point on why the modified LTK algorithmis not very good at detecting low clouds. One possible ex-planation is that low clouds tend to be more broken giv-ing rise to more situations of partially cloudy pixels. Thesepixels are more rarely classified as cloudy for the seriesof spectral tests designed around a limited number of bands.
Finally, the robustness of the above performance results wastested with a second set of data from MODIS-Terra on July 15,2002. In all, 104 granules contained sunlit data equatorwardof 60◦ on July 15. The modified LTK algorithm [3] correctlyclassified 78.1% of the data in July, while the enhanced LTKclassified 85.2% of the data correctly. The similarity of the over-all performance between the July and January days is consistentwith the aforementioned similarity of the spectral thresholdsderived from the July ECMWF reanalysis data. Moreover, theoverall performance of the enhanced LTK for the July dayimplies that the relative distribution of cloud types between60◦ N and 60◦ S is alike between the two randomly chosen dayson opposite seasons.
V. MODIS GRANULE ANALYSIS
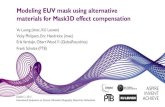
The performance of the modified LTK and enhanced LTKalgorithms was also examined at the level of individual MODISgranules (scenes). An example granule showcasing the perfor-mance of LTK is shown in Fig. 5. As expected by the results ofTable II, the modified LTK algorithm has difficulties detectingthe high thin clouds in the upper part of the image, while theenhanced LTK captures a significant number of these clouds.Overall, the enhanced LTK appears to be tracking the MODIScloud mask very closely.
The original 108 sunlit granules for January 15 were filteredto include only the 97 granules with center latitudes below 60◦.The percentage agreement at the pixel level for the modified andenhanced LTK with respect to MOD35 for these 97 granules isshown in Fig. 6. The original LTK has an overall agreementof 79.2% per scene, while the enhanced LTK has an overallagreement of 87.7% per scene (Table II), an improvement of8.5%. The enhanced LTK improves the MOD35 agreement for92 granules and worsens the agreement for only five granules.Using 80% agreement as the boundary between good and weakperformance, the modified LTK meets or exceeds this baselinefor 51 of the 97 granules, while the enhanced LTK meets orexceeds this baseline for 83 of the 97 granules.
The percentage agreement with respect to MOD35 is plottedin Fig. 7 versus the absolute granule cloud fraction errors forboth the modified and enhanced LTK. When the scene cloudfraction error is examined against the percentage level of agree-ment at the pixel level, the degree of cancellation of clear and

WILSON AND OREOPOULOS: ENHANCING A SIMPLE MODIS CLOUD MASK ALGORITHM 729
Fig. 5. Cloud masks for a MODIS-Terra granule off the coast of South Africa on January 15, 2002 at 0910Z. The top image shows the MOD35 cloud maskstratified by the MOD06 Cloud Top Pressure Product: Clouds are in blue, green, and red, while clear skies are generated by a false-color 4-3-2 RGB image(near-infrared, red, and green, respectively). The bottom images with clouds in yellow depict the cloud mask according to the modified and enhanced LTKalgorithms.
cloudy detection errors can be assessed. To better understandthis figure, consider as an extreme example a granule to whichboth the LTK and MOD35 assign a cloud fraction of 50% (0.5if cloud fraction is measured in the scale from 0 to 1). However,if the LTK and MOD35 schemes always disagree in the pixelsthey classify as cloudy, their level of agreement would be
0%, even if the absolute scene cloud fraction error is also 0%(since both scenes are 50% cloudy). This occurs because themisclassifications of clear and cloudy pixels cancel each otherout. A perfect classification corresponds to a 0% cloud fractionerror paired with 100% pixel-level agreement. Fig. 7 showsdeviations from this ideal. The 80% agreement and the 20%

730 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 51, NO. 2, FEBRUARY 2013
Fig. 6. Comparison between the levels of agreement with respect to theMODIS MOD35 cloud mask of the modified and enhanced LTK algorithms forthe 97 MODIS granules of January 15, 2002. Points in the upper right quadrantindicate granules with good agreement (> 80%) in both the original LTKand the enhanced LTK. Points in the lower left quadrant have poor agreement(< 80%) for both algorithms. Points in the upper left quadrant are granules ofpoor agreement for the original LTK but good agreement for the enhanced LTK.Points in the lower right quadrant exhibit good agreement for the original LTKbut poor agreement for the enhanced LTK.
absolute scene cloud fraction error lines placed in Fig. 7 create aquadrant (lower left) containing those granules with significantcancellation errors, i.e., the granules in this quadrant have lowpixel-level agreement, but similar cloud fractions to MOD35.The modified LTK has ten granules in this quadrant, while theenhanced LTK has six granules in this quadrant. This suggeststhat while cancellation errors are not very common in either themodified LTK or the enhanced LTK, the new scheme is onceagain better according to this performance metric.
VI. SUMMARY AND CONCLUSION
This work illustrates the importance to cloud detection of theavailability of the 1.38 μm cirrus band and of two thermal bandscentered at 11 and 12 μm in the future LDCM mission. Thesebands are expected to facilitate detection of high and thin cloudsin LDCM imagery. Their potential impact is demonstrated herethrough the use of MODIS-Terra data. MODIS has the abovebands, as well as the bands required to apply the Landsat cloudmask (modified LTK scheme) discussed in Oreopoulos et al.[3]. Despite different spatial resolutions, sampling patterns, andrevisit frequencies, we postulate that MODIS data are quitesuitable as a testbed for which enhancements of the modifiedLTK scheme can be developed. Refinements to the schemeproposed here will be possible once actual LDCM data becomeavailable.
Thresholds for 1.38 μm reflectances and the split-windowtechnique were derived by running a MODIS radiance sim-ulation tool built around the DISORT RT code on ECMWFERA-40 reanalysis data from January 15, 2002. Both the origi-nal clear-sky profiles and a large ensemble of our own profilesgenerated by inserting various ice clouds at the upper levels ofthe troposphere were used in these RT simulations. A singleglobal threshold was derived for the 1.38 μm channel, whilesplit-window (brightness temperature differences between
Fig. 7. Scatter plots of percentage pixel-level agreement versus granuleabsolute cloud fraction error for the modified and enhanced LTK algorithms.Each point represents a MODIS granule from January 15, 2002. Points that fallin the lower left quadrant formed by the vertical and horizontal lines representgranules with a large cancellation error (absolute cloud fraction error < 20%).Granules in this quadrant have low pixel-level agreement relative to MOD35but granule cloud fractions close to MOD35.
11 and 12 μm) thresholds were calculated for 1 K bins of the11 μm brightness temperature. A previously developed cloudmasking scheme was adapted to include these new tests andthresholds and was subsequently applied on MODIS radiancesfrom the same day, as well as MODIS data from six monthslater. All data was under daylight conditions and equatorwardof 60◦. The results for January showed an overall agreementwith the official MODIS cloud mask (MOD35) of 79.2% forthe modified LTK and an overall agreement of 87.8% for thenew (enhanced) version of the LTK with additional 1.38 μmand split-window tests. The results for July showed an overallagreement of 78.1% for the modified LTK alone, and an overallagreement of 85.2% for the enhanced LTK, very similar tothe January data set. This indicates that the thresholds derivedthrough the DISORT analysis are appropriate for MODIS andapplicable to multiple days. When the performance of themodified LTK and the enhanced LTK were examined at thelevel of MODIS granules, we found that for the 97 granuleswith an average latitude less than 60◦, the modified LTK had atleast 80% agreement with the MOD35 cloud mask for 51 of the97 granules. The enhanced LTK had at least 80% agreement toMOD35 for 83 of the 97 granules.

WILSON AND OREOPOULOS: ENHANCING A SIMPLE MODIS CLOUD MASK ALGORITHM 731
Given the similarities between the MODIS and LDCM bandsused in the enhanced LTK scheme, the cloud masking algorithmproposed here can be applied to the future LDCM mission.Whereas the modified LTK of Oreopoulos et al. [3] was de-signed for cloud masking without the TIRS instrument andprovides a technique that can produce cloud masks consistentwith previous Landsat missions, the enhanced LTK is an im-proved cloud masking technique that utilizes the new channelsof LDCM and can be combined with an operational cloudmask for a future cloud mask product, or to help establishconfidence levels in operational cloud detection. Most of theimprovement in the enhanced LTK compared to its previousincarnation comes from cloud detection over water surfaces forreasons that are not entirely understood. While oceans are ofsecondary interest to Landsat missions, knowledge of cloudamounts in water-covered parts of a scene is still importantinformation for evaluating scene quality, since it allows us toinfer the clear area fraction over the land portion. Moreover,having the best possible cloud scores in coastal scenes or otherscenes containing land-water mixtures will be very valuable infine-tuning the implementation of the LDCM long-term sceneacquisition plan.
ACKNOWLEDGMENT
Funding by the U.S. Geological Survey is gratefullyacknowledged.
REFERENCES
[1] R. R. Irish, J. L. Barker, S. N. Goward, and T. Arvidson, “Characterizationof the Landsat-7 ETM automated cloud-cover assessment (ACCA) algo-rithm,” Photogramm. Eng. Remote Sens., vol. 72, no. 10, pp. 1179–1188,Oct. 2006.
[2] T. Arvidson, J. Gasch, and S. N. Goward, “Landsat 7’s long term acquisi-tion plan—An innovative approach to building a global archive,” RemoteSens. Environ., vol. 78, no. 1/2, pp. 13–26, Oct. 2001.
[3] L. Oreopoulos, M. J. Wilson, and T. Várnai, “Implementation on Landsatdata of a simple cloud-mask algorithm developed for MODIS land bands,”IEEE Geosci. Remote Sens. Lett., vol. 8, no. 4, pp. 597–601, Jul. 2011.
[4] B.-C. Gao and Y. J. Kaufman, “Selection of the 1.375-um MODIS channelfor remote sensing of cirrus clouds and stratospheric aerosols from space,”J. Atmos. Sci., vol. 52, no. 23, pp. 4231–4237, Dec. 1995.
[5] T. Inoue, “A cloud type classification with NOAA 7 split-window mea-surements,” J. Geophys. Res., vol. 92, no. D4, pp. 3991–4000, 1987.
[6] Y. Luo, A. P. Trishchenko, and K. V. Khlopenkov, “Developing clear-sky, cloud, and cloud shadow mask for producing clear-sky composites at250-meter spatial resolution for the seven MODIS land bands over Canadaand North America,” Remote Sens. Environ., vol. 112, no. 12, pp. 4167–4185, Dec. 2008.
[7] B.-C. Gao, P. Yang, W. Han, R.-R. Li, and W. J. Wiscombe, “An algorithmusing visible and 1.38-um channels to retrieve cirrus cloud reflectancesfrom aircraft and satellite data,” IEEE Trans. Geosci. Remote Sens.,vol. 40, no. 8, pp. 1659–1668, Aug. 2002.
[8] R. W. Saunders and K. T. Kriebel, “An improved method for detectingclear sky and cloudy radiances from AVHRR data,” Int. J. Remote Sens.,vol. 9, no. 1, pp. 123–150, 1988.
[9] S.-H. Ham, B.-J. Sohn, P. Yang, and B. A. Baum, “Assessment of thequality of MODIS cloud products from radiance simulations,” J. Appl.Meteorol. Climatol., vol. 48, no. 8, pp. 1591–1612, Aug. 2009.
[10] B.-J. Sohn, S. Ham, P. Yang, and B. A. Baum, “Simulation of fifteenMODIS bands for the assessment of MODIS cloud products,” presented atthe Hyperspectral Imaging Sensing Environment, OSA Tech. Dig. (CD),Vancouver, BC, Canada, Paper HWB3. [Online]. Available: http://www.opticsinfobase.org/abstract.cfm?URI=HISensE-2009-HWB3
[11] D. P. Kratz, “The correlated k-distribution technique as applied to theAVHRR channels,” J. Quant. Spectrosc. Radiat. Transf., vol. 53, no. 5,pp. 501–517, 1995.
[12] S. Ackerman, K. I. Strabala, W. P. Menzel, R. A. Frey, C. C. Moeller,and L. E. Gumley, “Discriminating clear sky from clouds with MODIS,”J. Geophys. Res., vol. 103, no. D24, pp. 32 141–32 157, Dec. 1998.
[13] S. Ackerman, R. Frey, K. Strabala, Y. Liu, L. Gumley, B. Baum, andP. Menzel, “Discriminating clear sky from clouds with MODIS, Algo-rithm theoretical basis document,” Univ. Wisconsin-Madision, Madison,WI, Oct. 2010, 117 pp.
Michael J. Wilson received the Ph.D. degree in atmospheric sciences from theUniversity of Illinois at Urbana-Champaign, Urbana.
He worked as a Contractor for the University of Maryland at BaltimoreCounty, Baltimore, for the Landsat Data Continuity Mission, with an emphasison cloud masking techniques in the visible and infrared spectra. He is now aContractor with I.M. Systems Group for the National Oceanic and AtmosphericAdministration. His work focuses on the CrIS and ATMS instruments on-boardthe NPP satellite.
Lazaros Oreopoulos received the Ph.D. degrees inatmospheric and oceanic sciences from McGill Uni-versity, Montreal, QC, Canada, in 1996.
He has been with the Climate and RadiationLaboratory, NASA Goddard Space Flight Center,Greenbelt, MD, since 1997 where he pursues re-search in climate change, modeling and remote sens-ing of clouds, and atmospheric radiative transfer. Hehas served as a member of the Landsat Science Teamand is currently the Deputy Project Scientist of theAqua satellite mission.