Dinâmica dos Sólidos

of 174
-
Upload
master-fucker -
Category
Documents
-
view
920 -
download
2
Transcript of Dinâmica dos Sólidos
DINMICA DOS CORPOS RGIDOSZ
& z
& y
zG
Omg
X
x
Y
Celso Pupo PesceEscola Politcnica da Universidade de So Paulo
Dinmica dos corpos rgidos
2
DINMICA DOS CORPOS RGIDOS
Celso Pupo PesceDepartamento de Engenharia MecnicaEscola Politcnica da Universidade de So Paulo
So Paulo, novembro de 2004 Revisado, maro 2009
Dinmica dos corpos rgidos
3
PrefcioO presente texto didtico foi originalmente elaborado tendo em vista compor um dos captulos de um livro de Mecnica Geral destinado a alunos de graduao em engenharia, nos moldes do curso ministrado na Escola Politcnica da Universidade de So Paulo. Entendeu-se, ento, ser interessante uma anlise mais extensiva, o que levou edio da presente monografia. No entanto, quando o assunto tratado enquadra-se na categoria dos denominados clssicos, dos quais a Mecnica constitui talvez o caso particular de maior importncia, posto que ocupa lugar nobre na histria da cincia e ao seu estudo to melhores e aprofundados textos foram dedicados, qualquer tratamento apresentado corre o srio risco da simples redundncia, para dizer o mnimo. Assim, no espere o leitor algo surpreendente, do ponto de vista didtico, mas to somente uma tentativa de sistematizar e organizar notas de aula que abrangem um limitado espectro, tanto ao nvel de completude como de profundidade no tratamento da matria. O desenvolvimento do texto reflete, em grande monta, a forma com que este autor acredita deva a formao de um engenheiro conceitual ser conduzida. D-se nfase deduo e discusso dos modelos da mecnica, procurando-se explicitar as hipteses sobre as quais so construdos, particularizando-os ento s diversas situaes de aplicao que se apresentam teis ao estudo da mecnica e da engenharia. Foge propositalmente, portanto, de uma abordagem usualmente encontrada em livros de cunho mais tcnico que, pode-se dizer, adotam o caminho que vai do particular para o geral, seguindo a orientao oposta, cuidando para no se desviar do contedo conceitual, contudo sem ingressar no formalismo e rigor matemticos excessivos. A deduo e a discusso das equaes do movimento so conduzidas de maneira relativamente detalhada, por vezes at um pouco exaustiva, quando diversas formas teis de sua aplicao so ento apresentadas. A notao vetorial utilizada, embora, quando pertinente, notao matricial seja empregada como alternativa til compreenso fsica, sntese ou aplicao numrica. Admite-se que o leitor apresente conhecimentos elementares de lgebra vetorial, lgebra linear e de clculo
Dinmica dos corpos rgidos
4
diferencial e integral alm de possuir alguma familiaridade com os fundamentos da Mecnica Clssica, a incluindo os captulos relativos esttica, cinemtica do ponto e de um corpo rgido, e dinmica do ponto. O agora Prof. Dr. Eduardo Aoun Tannuri, quando cursava o terceiro ano de Engenharia Mecatrnica, EM 1996, ofereceu-se para auxiliar-me na elaborao dos exemplos, na reviso do texto e em sua edio. Mais do que um auxlio, o que se viu foi um trabalho efetivo, na soluo de boa parte dos exemplos propostos e na elaborao de figuras, seguido por uma reviso cuidadosa, que acabou por apontar diversos erros de impresso por mim cometidos e sugestes de melhorias na redao. A ele os meus mais sinceros agradecimentos. Agradecerei tambm, imensamente, contribuies do leitor no sentido de identificar quaisquer outros erros, eventualmente ainda presentes. Agradeo tambm a valiosa contribuio de todos os colegas docentes da equipe de Mecnica Geral da Escola Politcnica, atravs de proveitosas e inspiradoras discusses, ao longo dos ltimos anos. Em especial, menciono: G.E.O. Giacaglia, L.N.F. Frana, A.L.C. Fujarra, A.N. Simos, C.A. Martins, D.C. Zachariadis, D.C. Donha, L.R. Padovese, L.S. Macedo, M. Massarani, P.C. Kaminski, R.G. Lima, R.B. Salvagni, R.M. de Souza, R. Ramos Jr. e R.S. Barbosa. Esta verso de maro de 2009 sofreu correes gramaticais e algumas melhorias de exposio, com correes, particularmente na seo 6.2.
So Paulo, outubro de 2001, dezembro 2004, maro 2009. C.P.P.
Dinmica dos corpos rgidos
5
Sumrio1.1.1.
PRELIMINARESfundamentos da cinemtica de um c.r.
79
2.2.1. 2.2. 2.3.
MOVIMENTO DO BARICENTROBARICENTRO Teorema do Movimento do Baricentro Adoo de um referencial fixo na Terra
1313 14 17
3.3.1.
ENERGIA CINTICA DE UM CORPO RGIDOEnergia Cintica de um Corpo Rgido e a Matriz de Inrcia
1919 23 23 25 31 36 38
3.2. Matriz de Inrcia 3.2.1. Momentos e Produtos de Inrcia 3.2.2. Transformao de Base e Eixos Principais de Inrcia 3.2.3. Propriedades da Matriz de Inrcia 3.2.4. Elipside de Inrcia 3.3. Teorema da Variao da Energia Cintica
4.4.1.
MOMENTO ANGULAR DE UM CORPO RGIDOMomento Angular e a Matriz de Inrcia
5858 64 68 70 71 73 75
4.2. Teorema do Momento Angular 4.2.1. Casos Particulares 4.2.2. Notao Matricial Alternativa 4.2.3. Relao entre Energia Cintica e Quantidade de Movimento 4.2.4. Binrio Giroscpico 4.2.5. Suplemento: Adoo do Referencial Terrestre
5.5.1.
ROTAO EM TORNO DE UM EIXO E BALANCEAMENTOEquacionamento e Reaes
8989 98 98 103
5.2. Balanceamento 5.2.1. Medida do desbalanceamento 5.2.2. Balanceamento
6.6.1.
MOVIMENTO EM TORNO DE UM PONTO FIXOngulos de Euler
108109 112 113
6.2. Aplicao do Teorema do Momento Angular 6.2.1. Casos que exibem axi-simetria de distribuio de massa
Dinmica dos corpos rgidos 6.3. Energia Cintica de um C.R. em Movimento em Torno de um Ponto Fixo
6
118 120 121 123 123 125 126 128 130
6.4. O Giroscpio 6.4.1. Precesso estacionria ou regular 6.4.2. Precesso livre 6.4.3. Movimento geral sob ao de torque em torno da linha dos ns. 6.5. O Problema do Pio 6.5.1. Precesso estacionria 6.5.2. Movimento geral 6.5.3. Notas Suplementares sobre Precesso Pseudo-Regular
7. 8.
BIBLIOGRAFIA ANEXO - SIMULAES COMPUTACIONAIS
142 144146 146 147 148 149 155 155 156 156 157 161 162 162 162 163 168 169 170 170 171
8.1. Exerccio de Simulao #1. Proposio. 8.1.1. Modelagem do sistema dinmico, deduzindo as equaes do movimento. 8.1.2. Modelagem do sistema atravs de simulador. 8.1.3. Simulao do modelo computacional 8.2. Exerccio de Simulao # 1. Exemplo de anlise.
8.3. Exerccio de Simulao 2. Proposio. 8.3.1. Modelagem do sistema dinmico; deduzindo as equaes do movimento. 8.3.2. Modelagem do sistema atravs de simulador. 8.3.3. Simulao do modelo computacional 8.4. Exerccio de Simulao # 2. Exemplo de anlise.
8.5. Exerccio de Simulao # 3. Proposio. 8.5.1. Modelagem do sistema dinmico; deduzindo as equaes do movimento. 8.5.2. Modelagem do sistema atravs de simulador. 8.5.3. Simulao do modelo computacional 8.6. Exerccio de Simulao # 3. Exemplo de anlise.
8.7. Exerccio de Simulao # 4. Proposio. 8.7.1. Modelagem do sistema dinmico, deduzindo as equaes do movimento. 8.7.2. Modelagem do sistema atravs de simulador 8.7.3. Simulao do modelo computacional 8.8. Exerccio de Simulao # 4. Exemplo de anlise.
Dinmica dos corpos rgidos
7
1. PRELIMINARESDo ponto de vista cinemtico, um Corpo Rgido (C.R.) pode ser definido como um corpo material que guarda a propriedade de invarincia de distncia relativa entre quaisquer pontos que o constituam. Esta a propriedade fundamental de um C.R.. Trata-se, obviamente, de uma idealizao, um modelo da realidade, porquanto inexistem, senso estrito, corpos materiais totalmente indeformveis. Um slido admitido indeformvel concretiza o conceito de um C.R.. A hiptese de indeformabilidade , no entanto, plausvel quando os deslocamentos relativos so fsica e matematicamente desprezveis face a escalas de comprimento outras que caracterizam o problema em estudo; por exemplo, escalas do movimento do corpo como um todo. Embora aparentemente bastante restritiva, a hiptese de C.R. encontra aplicaes prticas de grande relevncia. O estudo dos movimentos de um navio quando sujeito ao das ondas do mar, por exemplo, em geral conduzido dentro da premissa de C.R.. No entanto quando o foco das atenes recai sobre fenmenos de vibrao estrutural da embarcao, esta hiptese no mais aplicvel. O mesmo pode ser dito quando do estudo do vo de areonaves e naves espaciais, do movimento de veculos automotores, rotores e mecanismos flexveis em geral. O princpio da solidificao ento aplicado, e o movimento estudado, sob hiptese de pequenos deslocamentos relativos, como composto por um movimento de corpo rgido atuado por foras e momentos de fora associados a tais deslocamentos; ver, p.ex., Meirovitch, pgina 483. O tratamento completo do tema, embora clssico, objeto de textos mais avanados (ver, tambm, p. ex., Sommerfeld, Mechanics of Deformable Bodies, 1950) e foge, portanto, do escopo do presente livro. Este texto fica restrito a casos onde a hiptese de C.R. for aplicvel. Permeia definies, conceitos e enunciados de teoremas gerais. O tratamento, embora algo matemtico, procura fugir propositalmente do rigor, atendendo ao formato didtico
Dinmica dos corpos rgidos
8
pretendido. Alm das aplicaes de carter conceitual, foram escolhidos exemplos que, embora ainda idealizados, so mais prximos do campo da engenharia. Inicialmente o Teorema do Movimento do Baricentro enunciado, a partir de consideraes elementares que definem o baricentro de um slido, em particular, de um corpo rgido. O Teorema da Energia Cintica abordado a seguir, a partir do conceito geral de energia cintica. deduzida a expresso associada ao movimento de um corpo rgido, quando ento emerge o conceito de matriz de inrcia. Suas propriedades principais so enunciadas e discutidas. O conceito de quantidade de movimento angular ou momento angular abordado no contexto do movimento de um C.R. Sua relao com a recm definida matriz de inrcia ento introduzida e o Teorema do Momento Angular, que relaciona a variao desta quantidade resultante dos momentos do sistema de foras externas aplicadas ao C.R. enunciado. Completam-se assim as equaes que regem o movimento de um C.R., partindo-se para algumas aplicaes de carter conceitual. O problema plano discutido e exemplificado, como primeiro tratamento de problemas mais prticos, por encerrar menores dificuldades. So adentrados ento problemas mais complexos, de cunho tridimensional. O Binrio Giroscpico definido e tratado atravs de exemplos didticos clssicos. O carter conservativo do efeitos giroscpicos discutido. O problema de Balanceamento de Rotores ento abordado de forma sistemtica, iniciando-se com a medida do desbalanceamento e culminando com a construo de um procedimento sistemtico de 'balanceamento'. O Movimento em Torno de um Ponto Fixo elaborado com algum detalhe. As equaes gerais do movimento so estabelecidas em termos dos ngulos de Euler e os problemas do giroscpio e do pio tratados de forma progressiva. Elementos dos conceitos de estabilidade, do ponto de vista fsico, so apresentados. O conceito de precesso estacionria abordado e discutido atravs de exemplos, incluindo o movimento de um girocompasso simplificado e finalizando com uma discusso a respeito de movimentos mais gerais, onde os conceitos de cone do corpo e cone espacial, generalizaes tridimensonais dos conceitos de base e rolante, so introduzidos. Como suplementos decidiu-se incluir alguma discusso a respeito do significado da adoo do referencial terrestre como sistema de referncias primrio e, ao final, elementos do estudo da precesso pseudo-regular, cuja discusso,
Dinmica dos corpos rgidos
9
acredita-se, pode ser bem apreciada por um aluno de graduao em fase algo adiantada ou por um aluno de ps-graduao. O anexo contm, ainda, a proposio de uma srie de exerccios de modelamento e simulao computacional, que so acompanhados de exemplos de anlises detalhadas, os quais devem ser trabalhados atravs de mdulos de simulao de sistemas dinmicos como, por exemplo, o mdulo SIMULINK do programa MATLAB, ou ainda o mdulo SCICOS do programa SCILAB. O primeiro marcaregistrada de MathWorks Inc., e o segundo de domnio pblico1, Estes exerccios ilustram srie regularmente aplicada na disciplina PME2200, Mecnica B, ministrada na Escola Politcnica a alunos da Grande rea Mecnica (habilitaes em Engenharia Mecnica, Mecatrnica, Naval e Produo) e conta com a contribuio de diversos colegas do Departamento de Engenharia Mecnica, cujos nomes so citados no devido tempo. A nosso ver tem-se constitudo em diferencial pedaggico, porquanto permitem o exerccio do modelamento e da anlise de diversos problemas da dinmica de um C.R., com ganho de percepo fsica, analtica e conceitual. Antes porm de adentrarmos a Dinamica do Corpo Rgido, prorpiamente dita, alguns fundamentos de cinemtica sero revisitados.
1.1. FUNDAMENTOS DA CINEMTICA DE UM C.R.No estudo da cinemtica de um corpo rgido existe um vnculo cinemtico, bastante especial, que relaciona a velocidade de dois pontos quaisquer deste corpo. Este vnculo prontamente derivvel da hiptese fundamental de um C.R. De forma geral pode-se dizer que este vnculo permite estabelecer, a cada instante, o campo cinemtico (de velocidades e aceleraes) que caracteriza um movimento rgido 2, e ser empregado neste texto repetidas vezes, nas diversas dedues e teoremas que seguiro. Atravs do vnculo cinemtico de C.R., basta o conhecimento da velocidade
1
(ftp://ftp.inria.fr/INRIA/Projects/Meta2/Scilab/distributions).
i.e., um movimento que satisfaz o vnculo cinemtico representado matematicamente pela frmula fundamental do C.R. (1.2)
2
Dinmica dos corpos rgidos
10
de um ponto pertencente ao corpo em estudo, ponto este arbitrariamente escolhido, e do vetor de rotao deste mesmo corpo, para que todo o campo de velocidades esteja univocamente determinado.
Pj
vj
z
vi Pi
O y
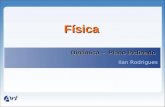
xFigura 1 C.R. e propriedade fundamental. Seja ( Pi Pj ) o vetor de posio relativa entre dois pontos quaisquer, Pi e Pj , de um
mesmo C.R. Ento ( Pi Pj ) = rij = constante , de tal forma que2
2
2 d d ( Pi Pj ) = ( Pi Pj ) ( Pi Pj ) = 2( v i v j ) ( Pi Pj ) = 0 dt dt
[
]
,
(1.1)
onde v i o vetor de velocidade de um ponto Pi do C.R. medida em relao a um referencial abitrariamente escolhido. A relao (1.1) demonstra que a velocidade relativa de dois pontos pertencentes ao mesmo C.R. perpendicular reta que os une (ou, seja, perpendicular ao vetor de posio relativa). De equao (1.1) mostra-se tambm (ver, p.ex., Frana e Matsumura, 2001) que existe uma relao unvoca entre os vetores de velocidade de dois pontos de um mesmo C.R. Esta relao dada por,
v i = v j + ( Pi Pj )
,
(1.2).
Dinmica dos corpos rgidos
11
e constitui a j mencionada frmula fundamental da cinemtica do C.R., ou ainda, vnculo cinemtico de um C.R. O vetor o vetor de rotao do corpo rgido, nico para cada instante considerado. Assim, uso ser sistematicamente feito de (1.2). A derivada de (1.2) em relao ao tempo fornece o campo de acelerao de um C.R.& a i = a j + ( Pi Pj ) + ( Pi Pj )
[
]
.
(1.3)
Vem tambm de (1.2) que,v i u = v j u = v = constante; u = ; 0 , (1.4)
invariante, portanto, com respeito a todo ponto pertencente ao C.R, onde u um versor que orienta . Em palavras, a componente v E = v u , do vetor de velocidade de qualquer ponto de um mesmo corpo rgido, na direo de seu vetor de rotao, independe do ponto considerado. Pode-se mostrar ento que, a cada instante, existe um lugar geomtrico (L.G.) de pontos que tem o vetor de velocidade paralelo ao vetor de rotao. Este vetor o mesmo para todos os pontos deste L.G. e tem mdulo mnimo. O L.G. uma reta, denominado "eixo helicoidal instantneo" e paralelo ao vetor de rotao. De fato, seja E um ponto genrico do C.R., pertencente a este L.G., e O um ponto qualquer do mesmo C.R.. Ento v E = = vw u . Segue ento de (1.2) que v E = v O + ( E O) = v u e portanto, ( E O) = v O v u , de onde, (1.5)
( E O) =
vO + ; 2
,
(1.6)
que a equao vetorial de uma reta paralela a . Ou seja, a cada instante o movimento geral de um C.R. pode ser interpretado como um "ato de movimento helicoidal", i.e., a combinao de um "ato de movimento translatrio, paralelo ao vetor de rotao" com um "ato de movimento de rotao", em torno do "eixo
Dinmica dos corpos rgidos
12
helicoidal instantneo", expresso por (1.6). De (1.4) e (1,5) segue tambm que v E mnimo. Um caso particular o de movimento plano. Neste caso o campo de velocidades perpendicular ao vetor de rotao e o "eixo helicoidal instantneo" sempre perpendicular ao plano do movimento. O trao deste eixo com o plano de movimento considerado denominado, ento, de Centro Instantneo deRotao (CIR). Por fim, dados trs pontos distintos e no alinhados ( O, A, B ), do mesmo C.R. (i.e.
( A O) ( B O) 0 ), cujas velocidades, v O , v A , v B , so conhecidas e, portanto,obedecem, duas a duas, a relao (1.1), o vetor de rotao = ( x , y , z ) , deste C.R., pode ser prontamente determinado de (1.2), e expresso na base solidria ao corpo (i, j, k ) , na forma,x = y = z =
(v Az vOz )x B (v Bz vOz )x A (v Ax vOx ) y B (v Bx vOx ) y AzB y A z A yB xB z A x A z B
,
(1.7)
(v
Ay
vOy )z B (v By vOy )z A yB x A y A xB
onde( A O) = ( x A , y A , z A ) ( B O) = ( x B , y B , z B ) v O = vOx i + vOy j + vOz k v A = v Ax i + v Ay j + v Az k v B = v Bx i + v By j + v Bz k .
Dinmica dos corpos rgidos
13
2. MOVIMENTO DO BARICENTRO
2.1. BARICENTROO centro de gravidade de um corpo material um caso particular do conceito de centro de um sistema de foras paralelas, quando o sistema constitudo por foraspeso. um ponto especial do eixo de momento mnimo3, (nulo, quando o sistema de foras paralelo). Pode ser definido como a interseco dos eixos de momento nulo correspondentes a duas orientaes arbitrrias do corpo, relativamente ao campo gravitacional. Sendo o sistema considerado constitudo por foras-peso, estas so linearmente proporcionais s massas dos elementos que constituem o corpo material. Posto ainda que o campo constante e paralelo, o centro de gravidade coincide, portanto, com o centro de massa do corpo material. Considere um corpo material contnuo. A posio de um elemento de massa dm dada pelo vetor de posio
( P O) ,
relativamente a um ponto O de referncia,
arbitrariamente escolhido. Seja (G O) o vetor de posio do centro de massa ou baricentro. Segue ento que
( G O) =
Corpo
( P O)dmm, (2.1)
3
Ver, p.ex., Frana e Matsumura, 2000.
Dinmica dos corpos rgidos
14
onde m a massa do corpo. O smbolo de integral aqui empregado com propriedade e por facilidade de notao, visto que o corpo em considerao suposto contnuo. O domnio de integrao definido como o espao ocupado pelo corpo considerado em um dado instante. Em casos particulares, idealizados, onde o corpo formado por um conjunto de N corpos, a notao ainda assim consistente, posto que, da propriedade associativa do operador linear de integrao e da definio do centro de massa de um sistema de pontos materiais,
( G O) =
(Gi
N
i
O)mi =i
( P O)dmi =1 Ci
N
mi =1
N
mi =1
N
=
Corpo
( P O)dmm. (2.2)
i
Corpo = iN 1 Ci =Em particular se O for o prprio centro de massa G segue de (2.2) que
Corpo
( P G )dm = 0
.
(2.3)
2.2. TEOREMA DO MOVIMENTO DO BARICENTROConsidere um corpo material contnuo, de massa m e um referencial inercial em relao ao qual se estuda o movimento do corpo. Seja O um ponto de referncia deste referencial. Da conhecida lei de Newton aplicada a um elemento de massa dm do corpo considerado, supondo invarincia da massa no tempo, segue que
df = adm
,
(2.4)
Dinmica dos corpos rgidos
15
onde df a resultante das foras agentes sobre o elemento de massa. A expresso acima se integrada em todo o domnio ocupado pelo corpo, considerando o sistema de foras internas equivalente a zero, consequncia do usual princpio de ao e reao da mecnica, conduz a
R=
Corpo
adm
,
(2.5)
onde R a resultante do sistema de foras externas agentes sobre o corpo. Segue ento que,
d2 d2 R= ( P O)dm = 2 dt 2 dt Corpo
d2 ( P O)dm = m dt 2 (G O) Corpo
,
(2.6)4
e, portanto,
R = ma G
(2.7)
A expresso acima constitui-se no Teorema do Movimento do Baricentro, vlida para um corpo material genrico, sob a hiptese de invarincia de massa. Em palavras: o
movimento do baricentro corresponde ao movimento de um ponto material de mesma massa do corpo considerado, caso sobre ele agisse a resultante do sistema de foras externas que propulsiona este corpo.Note que nada foi assumido at o presente momento, no que concerne hiptese de indeformabilidade. O campo cinemtico que caracteriza um C.R. ser agora suposto vlido. Sejam ento P um ponto genrico deste corpo que posiciona o elemento de massa dm e Q, um ponto especfico que executa um 'movimento rgido' solidrio ao
4
Estamos tratando de um domnio de integrao que contm, sempre, a mesma quantidade de matria. Da a possibilidade de inverter a ordem de aplicao dos operadores linerares de diferenciao e integrao. No devemos aqui confundir o domnio de integrao com o usual conceito de volume de
Dinmica dos corpos rgidos
16
corpo (em particular, um ponto do prprio corpo). Do vnculo cinemtico de C.R., a acelerao a de P ser dada por& a = a Q + ( P Q) + v v Q
(
), (2.8)
( v v ) = ( P Q)Q
com
onde o vetor de rotao do corpo. Se substituda em (2.5), a expresso acima conduz a,
R=
Corpo
(a
Q
& + ( P Q) + v v Q dm =Q
(
))
= aQ
Corpo
& dm + ( P Q)dm + ( v v )dm =Corpo Corpo
.
(2.9)
& = a Qm +
Corpo
( P Q)dm + ( P Q)dm Corpo
Segue, ento, de (2.1) que,
& R = m a Q + ( G Q) + ( ( G Q))
(
)
.
(2.10)
Caso o ponto Q escolhido seja o prprio centro de massa G, a expresso acima fica simplificada na forma geral (2.7). Note que, alternativamente, e partindo desta expresso geral, a equao (2.10) seria prontamente recuperada, aplicando-se o vnculo cinemtico de corpo rgido entre os pontos G e Q.
controle, por sua vez presente na deduo das equaes de movimento de massas fluidas, e atravs do qual pode existir fluxo de massa (ver, p.ex., Meirovitch, pgina 483).
Dinmica dos corpos rgidos
17
2.3. ADOO DE UM REFERENCIAL FIXO NA TERRAO referencial terrestre em geral a escolha mais natural. Este referencial , estritamente, no-inercial, posto que apresenta rotao. A segunda lei de Newton vlida para referenciais Newtonianos ou inerciais, no entanto. Assim, a equao (2.7) deve ser reinterpretada, se o refencial adotado fixo na Terra. Note, em primeiro lugar, que qualquer tentativa de medio da ao gravitacional, espelhar no apenas a prpria atrao gravitacional, mas tambm a 'fora de inrcia' conhecida como fora centrfuga. Ou seja, se denominarmos F, a fora de gravitao e C a "fora centrfuga" decorrente da rotao da Terra, a fora peso P que efetivamente estar sendo medida , na realidade a resultante de F e C,
F+C= Pcom
,
(2.11)
C = m( e ( e (G O ))
,
(2.12)
onde e o vetor de rotao do referencial terrestre, G o centro de massa do corpo considerado e O a origem deste referencial, assumida em algum ponto de seu eixo de rotao. Assim, sendo R a resultante das foras externas agentes sobre o corpo, cujo movimento objeto de estudo, designando F , as foras externas outras que no de origem gravitacional, sobre ele agentes, pode-se ento escrever,
R = F + F = P C + FPor outro lado, a acelerao do centro de massa do corpo dada por,
.
(2.13)
Dinmica dos corpos rgidos
18
a G = a O + e ( e (G O )) + 2 e v Grel + a Grel
,
(2.14)
onde os dois primeiros termos correspondem acelerao de arrastamento, o terceiro a acelerao de Coriolis do centro de massa e o ltimo a acelerao do centro de massa em relao ao referencial fixo na Terra. Desta forma, sendo as foras de inrcia, centrfuga e de Coriolis, dadas respectivamente por,
C = m e ( e (G O )) FC = 2m e v Grel vem, utilizando-se de (2.13) e do Princpio de DAlembert,
,
(2.15)5
R + FI = 0 aplicado equivalentemente a (2.7), onde
(2.16)
FI = ma G o conjunto das foras de inrcia, e desconsiderando a O , que
(2.17)
R = P C + F = C Fc + ma Grel Assim,
.
(2.18)
ma Grel = P + F + Fc
.
(2.19)
Esta a equao que efetivamente deve ser integrada, quando a posio medida relativamente ao referencial Terra.
5
Note que
Corpo
2
e
v rel dm = 2 e
Corpo
v
rel
dm = 2 e mv Grel = 2 e Q rel
Dinmica dos corpos rgidos
19
3. ENERGIA CINTICA DE UM CORPO RGIDO
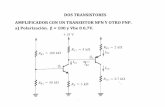
3.1. ENERGIA CINTICA DE UM CORPO RGIDO E A MATRIZ DE INRCIAConsidere um corpo rgido e dois referenciais. O primeiro, em relao ao qual medido o movimento e o segundo solidrio ao corpo. Sejam ( O, x , y , z ) e
(O , x , y , z ) os sistemas cartesianos que os orientam, respectivamente.
P z r
O z y
y O x
x
Figura 2 C.R. e sistemas de referncia. A energia cintica de um elemento diferencial de massa que compe o corpo rgido , por definio
Dinmica dos corpos rgidos
20
dT =
1 2 v dm 2
.
(3.1)
A energia cintica do corpo, como um todo, fica ento escrita,
T=
1 2 v dm 2 Corpo
.
(3.2)
Seja r = ( P O ) o vetor de posio relativa do elemento diferencial de massa dm ao ponto O, pertencente ao corpo (ou que executa um 'movimento rgido' solidrio ao corpo). Da frmula fundamental da cinemtica de um C.R., equao (1.2), vem
v = v O + r e, portanto,
,
(3.3)
T=
1 1 ( v O + r ) 2 dm = v O 2 dm + 2( v O r )dm + ( r ) 2 dm = 2 Corpo 2 Corpo Corpo Corpo 1 2 = v O 2 dm + 2 v O r dm + ( r ) dm 2 Corpo Corpo Corpo . (3.4)
A integral no primeiro termo facilmente identificvel como a massa do corpo. Da definio de centro de massa, equao (2.1), por sua vez, a integral do segundo termo pode ser escrita,
Corpo
r dm = mr
G
= m(G O )
.
(3.5)
Dinmica dos corpos rgidos
21
Denotando, ainda, = ( x , y , z ) e r = ( x , y , z ) , o leitor poder verificar que o terceiro termo fica,
Corpo
( r)
2
2 dm = x
Corpo
( y
2
+ z 2 dm + 2 yz
)
Corpo
(z
2
2 + x 2 dm + z
)
Corpo x
( x
2
+ y 2 dm +
)
2 y z
Corpo
yzdm 2
x
Corpo
zxdm 2
y
Corpo
xydm, (3.6)
que tambm pode ser escrito, compactamente, na forma matricial,
1 1 t 2 ( r ) dm = 2 {} [ JO ]{} 2 Corpo
(3.7)6
onde a matriz quadrada de ordem trs,
2 2 y + z dm Corpo [ JO ] = y x dm Corpo z x dm Corpo
(
)
Corpo Corpo 2 2 z + x dm Corpoy z dm Corpo 2 2 z y dm x + y dm Corpo Corpo
x y dm
x z dm
(
)
(3.8)
(
)
constituda por momentos de massa de segunda ordem, denominada matriz deinrcia do corpo em relao ao sistema considerado. Os termos da diagonal principal
so denominados momentos de inrcia em relao aos eixos ( x , y , z ) , respectivamente e aqui sero denotados por J x , J y , J z . Os termos fora da diagonal so denominados produtos de inrcia e aqui sero denotados por J x y , J y z , J z x . Note que, por construo, a matriz de inrcia simtrica.
6
O super-escrito t indica a operao de transposio.
Dinmica dos corpos rgidos
22
A matriz de inrcia uma entidade fsica de extrema importncia, pois mede a distribuio de massa de um corpo em relao a um dado sistema de coordenadas. Goza de diversas propriedades e fundamental ao equacionamento do movimento de um corpo rgido. Estas propriedades sero apresentadas e estudadas mais adiante. Voltando a ateno energia cintica e substituindo as expresses (3.5) e (3.7), a equao (3.4) fica escrita na forma,
T=
1 1 t 2 mv O + mv O (G O ) + {} [ JO ]{} 2 2
.
(3.9)
O primeiro termo est associado translao do corpo; o segundo termo translao e rotao; o terceiro termo, apenas rotao. Se a escolha for tal que O G , a expresso da energia cintica ficar simplificada na forma,
T=
1 1 t 2 mv G + {} [ JG ]{} 2 2
.
(3.10)
Ou seja, a energia cintica de um corpo em movimento rgido, medida em relao a um dado referencial, pode ser decomposta em duas parcelas: a primeira associada apenas ao movimento do centro de massa e a segunda associada rotao. Outro caso particular merece especial ateno dada sua importncia conceitual e prtica. Se O for um ponto fixo Neste caso tem-se, a expresso da energia cintica reduzida apenas parcela associada rotao, T= 1 {} T [ JO ]{}; O um ponto fixo 2 (3.11)
Genericamente, por outro lado, da identidade envolvendo o produto misto de trs vetores a b c = b c a = c a b , a expresso (3.9) pode ser alternativamente escrita na forma
Dinmica dos corpos rgidos
23
T=
1 1 t 2 mv O (O G ) mv O + {} [ JO ]{} 2 2
(3.12)
O segundo termo da expresso acima pode ento ser identificado como o produto escalar entre o vetor de rotao do corpo e o momento angular, calculado em relao ao centro de massa do corpo, que seria obtido se toda a massa do corpo fosse concentrada no ponto O.
3.2. MATRIZ DE INRCIAA matriz de inrcia de um corpo material constitui-se, na realidade, em um conceito mais amplo, e pode ser definida mesmo para corpos no rgidos, como por exemplo para um corpo elstico. Neste caso, no entanto, a matriz de inrcia depende do instante considerado e o clculo da energia cintica no pode ser feito atravs da aplicao do vnculo cinemtico de corpo rgido. Do ponto de vista puramente matemtico a matriz de inrcia enquadra-se dentro de uma classe mais ampla de grandezas, denominadas tensores. comum, em textos algo mais avanados, a referncia tensor de inrcia. Em particular a matriz de inrcia um tensor de segunda-ordem, gozando, portanto, de todas as propriedades inerentes a esta classe especial. Estas observaes visam to somente situar o leitor, motivandoo a um estudo mais aprofundado do assunto, tarefa que obviamente foge ao objetivo do presente texto. As definies, conceitos e propriedades tratadas a seguir atm-se to somente ao desenvolvimento necessrio mecnica geral, ao nvel de graduao em engenharia.
3.2.1.
Momentos e Produtos de Inrcia
Define-se o momento polar de inrcia de um corpo material em relao a um plo O, entidade escalar,
Dinmica dos corpos rgidos
24
IO =
Corpo
( P O)
2
dm
.
(3.13)
O momento polar de inrcia mede, portanto, a distribuio de massa de um dado corpo material em torno de um ponto. De forma anloga, o momento de inrcia de um corpo em relao a um eixo Ou , onde u um versor, mede a distribuio de massa de um corpo em relao a este eixo. Lembrando que o quadrado da distncia de um ponto P reta Ou dado por d u2 = ( ( P O) u) = P O sen 2 , onde o ngulo interno entre ( P O) e u , o2 2
momento de inrcia de um corpo em relao a um eixo Ou ento definido como,
Ju =
Corpo
d u2 dm =
Corpo
( ( P O) u )
2
dm
(3.14)
Tomando um sistema cartesiano (O, x , y , z ) , ( P O) = xi + yj + zk , os quadrados das distncias do ponto P aos eixos (x,y,z) so dados, respectivamente, por,
d x2 = y 2 + z 22 d y = z2 + x2
,
(3.15)
d z2 = x 2 + y 2
de tal sorte que os momentos de inrcia em relao aos eixos (x,y,z), passantes por O, ficam
Jx = Jy = Jz =
Corpo
(y (z
2
+ z 2 dm + x 2 dm + y 2 dm
)
2
)
(3.16)
Corpo
Corpo
(x
2
)
Dinmica dos corpos rgidos
25
O momento polar de inrcia em relao ao plo O fica escrito na forma,
IO =
1 ( x 2 + y 2 + z 2 )dm 2 Corpo
,
(3.17)
Definem-se7, por outro lado os produtos de inrcia com respeito aos eixos ( x , y ),( x , z ),( y , z ) , como os escalares
J xy = J xz = J yz =
Corpo
xydm = yxdm = JCorpo Corpo
yx
Corpo
xzdm = zxdm = JCorpo
zx
(3.18)
Corpo
xydm = yxdm = J
yx
A matriz de inrcia pode ento ser definida,
Jx [J O ] = J yx J zx
J xy Jy J zy
J xz J yz Jz
(3.19)
3.2.2.
Transformao de Base e Eixos Principais de Inrcia
Considere,conforme a figura abaixo, e alterando um pouco a notao, dois sistemas de coordenadas, ( x1 , x 2 , x 3 ) e ( x1 , x 2 , x 3 ) , ambos com origem em O e orientados pelas bases cannicas (i, j, k ) e ( i , j , k )
7
O sinal positivo , por vezes, preferido na definio.
Dinmica dos corpos rgidos
26
x3
x3
33 23 13 31x1
32 22 12 21
x2
11
x2 x1Figura 3 Mudana de base e transformao de coordenadasUm vetor genrico r = ( x1 , x 2 , x 3 ) dado por r = ( x1 , x 2 , x 3 ) , se representado na base (i , j , k ) . Sejam ij os ngulos formados entre os eixos xi e x j . Note que, em geral,
ij ji . As coordenadas ( x1 , x 2 , x 3 ) e ( x1 , x 2 , x 3 ) se relacionam entre si
atravs das expresses,
xi = cos ij x jj =1
3
.
(3.20)8
Ou, em forma mais compacta,
{r } = [B]{r}onde,
(3.21)
8
cos ij so os denominados cossenos diretores.
Dinmica dos corpos rgidos
27
[B] = [cos ij ]
; i , j = 1,2,3
(3.22)
a denominada matriz de mudana de base, formada pelos cossenos diretores cos ij . Explicitamente,
cos 11 [B] = cos 21 cos 31
cos 12 cos 22 cos 32
cos 13 cos 23 cos 33
(3.23)
Considere agora dois vetores p e q relacionados entre si por uma matriz [A]. Em notao matricial,
{p} = [ A ]{q}
.
(3.24)
Cabe aqui determinar a matriz [A] correspondente transformao de base. Prmultiplicando a expresso (3.24) pela matriz [B] e introduzindo a matriz identidade de ordem 3, [I], entre [A] e {q}, vem que
[B]{p} = [B][ A ][ I]{q} .Porm, [ I] = [B ]1
[B] e, portanto,
[B]{p} = [B][ A ][B]1 [B]{q} .resultando,
{p } = [ A ]{q }com,
,
(3.25)
Dinmica dos corpos rgidos
28
[ A ] = [B][ A ][B]1No caso em estudo, onde o interesse reside na matriz de inrcia, tem-se
(3.26)
[ J O ] = [B][ J O ][B]1
.
(3.27)
Ainda, a matriz de mudana de base ortogonal, posto que a transformao o . Assim,
[ B ] 1 = [ B ] te portanto,
(3.28)
[ J O ] = [B][ J O ][B]t
(3.29)
A matriz [ J ] , portanto, a matriz de inrcia calculada no sistema (O , x1 , x 2 , x 3 ) . O
Quando diagonal, a matriz de inrcia dita relativa a eixos principais de inrcia. Se, alm disso, o plo O coincidir com o centro de massa G do corpo, os eixos so ditos centrais de inrcia. Como ser visto adiante, qualquer eventual eixo de simetria ocorrente na distribuio de massa do corpo ser um eixo principal de inrcia. Para corpos de forma geomtrica simples, com distribuio homognea de massa, relativamente fcil identificar eixos principais de inrcia. Para um caso mais geral, ou ao menos mais complexo, nem sempre imediato identificar elementos de simetria. assim interessante determinarmos eixos principais de inrcia. Existe uma transformao particular que
Dinmica dos corpos rgidos
29
diagonaliza a matriz de inrcia, transformando-a em uma matriz principal de inrcia. Seja [P] a matriz de mudana de base que diagonaliza [ J O ] . Ento,
[J ] = [P][J ][P]p O O
t
(3.30)
Est fora do escopo do presente texto uma anlise aprofundada do presente problema. Pede-se ao leitor mais interessado que consulte textos especficos, de lgebra-linear. Cabe ressaltar, no entanto, que a matriz [P] formada pelos auto-vetores da matriz
[ J O ] . Ou seja,
{p 1 } t t [P] = {p 2 } {p } t 3
(3.31)
onde
{p i }; i = 1,2,3
so
os
autovetores
correspondentes
aos
auto-valores
i ; i = 1,2,3 da matriz [ J O ] .
I 11 Exemplo 2.1 - Dada a matriz de inrcia I 21
I 12 da figura plana abaixo nos eixos I 22
Ox1x2 calcule a matriz segundo os eixos Ox1x2 . Em seguida, calcule para que o sistema Ox1x2 seja de eixos principais.
x2 x2 21 O
12 x1 x1
Dinmica dos corpos rgidos
30
Como:
x1 = cos x1 + sen x 2 x 2 = sen x1 + cos x 2 cos logo, [ B] = sen sen . Pode-se ento escrever: cos
[ I O ] = [ B]T [ I O ][ B] Realizando as multiplicaes, obtm-se: I 11 = I 11 cos 2 + I 22 sen 2 + 2 I 12 cossen I 22 = I 11 sen 2 + I 22 cos 2 2 I 121 cossen I 12 = I 11 sen cos + I 22 sen cos + I 12 cos 2 I 21 sen 2 = I 21 Para que os eixos sejam principais: I 12 = 0 (cos2 sen 2 ) I 12 = sen cos ( I 11 I 22 )
tan 2 =
2 I 12 , que fornece o ngulo que orienta os eixos principais. I 11 I 22
Dinmica dos corpos rgidos
31
3.2.3.
Propriedades da Matriz de Inrcia
A matriz de inrcia goza de diversas propriedades. Simetria A matriz de inrcia simtrica. De fato, a prpria definio dos produtos de inrcia (3.18) e a propriedade comutativa da operao de multiplicao demonstram este fato. Invarincia do trao O trao da matriz de inrcia invariante com respeito mudana de base. De fato, de (3.16) e (3.17) segue que, J x + J y + Jz = 2IO qualquer que seja o sistema (O, x , y , z) escolhido. Positividade A matriz de inrcia definida positiva. De fato, os momentos de inrcia so formas quadrticas e portanto, excetuando-se o caso (idealizado) em que todos os pontos se distribuam sobre o mesmo eixo, so sempre positivos. Por outro lado a matriz de inrcia pode ser diagonalizada e, como o trao da matriz invariante, seu determinante ser sempre maior ou igual a zero. Composio Considere uma partio do corpo em N sub-conjuntos. Da definio dos momentos e produtos de inrcia (3.16) e (3.18) e da propriedade associativa da operao de integrao possvel decompor estas grandezas de forma correspondente partio considerada. De fato, (3.32)
Dinmica dos corpos rgidos
32
Jx =
Corpo
(
y 2 + z 2 dm = y 2 + z 2 dmj =1 Cj
)
N
(
)
(3.33)J xy =
Corpo
xydm = xydmj =1 Cj
N
onde C j indica a j-sima partio do corpo. A expresso acima obviamente vale, de forma anloga, para os demais momentos e produtos de inrcia. Decorre, tambm, a propriedade subtrativa. Isto , definindo o corpo de interesse C A a partir da decomposio de um corpo C tal que C = C A C B segue, por exemplo, que
C C Jx A = Jx Jx B
C
,
(3.34)
o mesmo valendo para os demais elementos da matriz de inrcia. Translao de Eixos
Considere um corpo e dois sistemas de coordenadas cartesianas ( x , y , z) e ( x , y , z ) , paralelos entre si, com origem O e O respectivamente. Seja (O O) = (a , b, c) o vetor de posio relativa, expresso na base que orienta ambos os sistemas de coordenadas. Tomando o momento de inrcia do corpo em relao ao eixo O x , por exemplo, segue ento, da definio que,
J xi = =
Corpo
( y 2 + z 2 )dm =
Corpo
( ( y b)Corpo
2
+ ( z c) 2 dm =
)
Corpo
2 2 2 2 ( y + z )dm + (b + c )
dm 2b
Corpo
ydm 2c
Corpo
zdm
(3.35)
Por outro lado, da definio da posio do centro de massa, calculada em relao ao ponto O ,
Dinmica dos corpos rgidos
33
mx G = my G = mz G =
Corpo
xdm ydm(3.36)
Corpo
Corpo
zdm
e, portanto,J x = J x + m(b 2 + c 2 ) 2mby G 2mczG J y = J y + m(c 2 + a 2 ) 2mcz G 2max G J z = J z + m(a 2 + b 2 ) 2max G 2mby G
.
(3.37)
Note a permutao cclica que, uma vez mais, comparece na expresso acima. Caso o ponto O seja o prprio centro de massa, ou seja, se O G , a equao acima fica simplificada na forma
J x = J Gx + m(b 2 + c 2 ) J y = J Gy + m(c 2 + a 2 ) J z = J Gz + m(a 2 + b 2 )
.
(3.38)
A equao (3.38) tambm conhecida como Teorema de Steiner. Permite enunciar a seguinte assertiva: uma vez definidas as direes dos eixos, os respectivos momentosde inrcia sero mnimos se a origem for o baricentro.
Por outro lado, tomando, por exemplo, o produto de inrcia em relao aos eixos (O x y ) ,J x yi = =
Corpo
x y dm =
Corpo
(( x a)( y b))dm =Corpo
Corpo
xydm ab
Corpo
dm + b
xdm + a
Corpo
ydm
,
(3.39)
utilizando (3.36) e generalizando para os demais eixos,
Dinmica dos corpos rgidos
34
J xy = J xy mab + mbxG + mayG J yz = J yz mbc + mcyG + mbz G J zx = J zx mca + maz G + mcxG
.
(3.40)
Novamente, caso O G , as equaes so simplificadas na forma,J x y = J xy mab J y z = J yz mbc J z x = J zx mca
.
(3.41)
Exemplo 2.2 - Uma chapa de ao possui quatro furos simetricamente distribudos. Calcule a matriz de inrcia para em relao aos eixos Gxyz indicados na figura.a
4 d b G 3 x y
1 G1 v
2
u
A matriz de inrcia da chapa pode ser calculada como a diferena entre a matriz de inrcia de uma chapa inteiria, de lados a e b, e a matriz de inrcia de quatro discos de dimetro d distantes u do eixo y e v do eixo x.
[J G ] = [J int ] [J disco1 ] [J disco2 ] [J disco3 ] [J disco4 ] G G G G GComo, devido simetria, G o baricentro tanto da chapa recortada como da inteiria. Assim:
Dinmica dos corpos rgidos
35
b2 12 [J int ] = ab 0 G 0 da chapa.
0a2 12
0
0 a2 + b2 12
0
, sendo a densidade superficial de massa
Para o disco 1, superior direita, o clculo de sua matriz de inrci, envolve a translao do sistema de eixos, do sistema que contm seu baricentro (G1) para o , em relao a Gxyz. Logo:d2 16 2 d Disco1 [J G ] = 0 4 0 0 2 + d 0 4 2 d 8 uv d2 + u2 16 0
0 d 162
0
v 2 uv 0 2 0 uv u 0 0 0
d2 + v2 16 d 2 Disco1 [J G ] = uv 4 0
0 0 2 d 8
Analogamente para os discos 2,3 e 4 temos:d2 + v2 16 d 2 Disco2 [J G ] = uv 4 0 d2 + v2 16 d 2 Disco 4 [J G ] = uv 4 0 0 0 2 d 8 0 0 2 d 8 d2 + v2 16 d 2 Disco3 [J G ] = uv 4 0 uv d2 + u2 16 0 0 0 2 d 8
uv d2 + u2 16 0
uv d2 + u2 16 0
Dinmica dos corpos rgidos
36
Assim, pode-se cacular a matriz de inrcia total. Notar que esta ser diagonal, ou seja, os produtos de inrcia sero nulos (lembrar da simetria).
3.2.4.
Elipside de Inrcia
Considere, novamente, um eixo Ou , orientado pelos cossenos diretores de u, i.e.,
u = cosi + cos j + cos k . Deseja-se expressar o momento de inrcia do corpo emrelao ao eixo Ou . Para tanto, calculando
( P O) u = ( xi + yj + zk ) (cosi + cos j + cos k ) = = ( y cos z cos )i + ( z cos x cos ) j + ( x cos y cos )ko quadrado da distncia de um ponto genrico P a este eixo fica dado por,
(3.42)
d u2 = ( ( P O) u) = ( y cos z cos ) + ( z cos x cos ) + ( x cos y cos ) (3.43)2 2 2 2
que pode ser reescrito na forma,
2 d u = cos2 ( y 2 + z 2 ) + cos2 ( z 2 + x 2 ) + cos2 ( x 2 + y 2 )
(
)
(
)
(
)
2( cos cos ) xy 2( cos cos ) zx 2( cos cos ) yz
.
(3.44)
Assim, substituindo (3.44) em (3.14),Ju = cos2
Corpo
(y
2
+ z 2 dm + cos2
)
Corpo
(z
2
+ x 2 dm + cos2
)
Corpo
(x
2
+ y 2 dm +
)
2 cos cos
corpo
xydm 2 cos cos xzdm 2 cos cos yzdmcorpo corpo
Ou seja,
Dinmica dos corpos rgidos
37
J u = cos2 J x + cos2 J y + cos2 J z + +2( cos cos ) J xy + 2(cos cos ) J xz + 2( cos cos ) J yz
(
)
(
)
(
)
.
(3.45)
Sejam ento as variveis,= = = cos Ju cos Ju cos Ju
(3.46)
A equao (3.45) pode ser escrita na forma,
J xx 2 + J yy 2 + J zz 2 + 2 J xy + 2 J xz + 2 J yz = 1
(3.47)
que a equao de um elipside, nas variveis ( , , ) . Este elipside recebe o nome de elipside de inrcia. Em particular, se ( x , y , z ) forem eixos principais de inrcia ( J xy = J xz = J yz = 0 ), a equao se reduz a,
p p p J xx 2 + J yy 2 + J zz 2 = 1
.
(3.48)
Dinmica dos corpos rgidos
38
3.3. TEOREMA CINTICA
DA
VARIAO
DA
ENERGIA
Considere um corpo material em movimento em relao a um referencial inercial. Conforme visto anteriormente, a energia cintica deste corpo, relativamente ao referencial considerado, pode ser expressa na forma da equao (3.2). Derivando-a em relao ao tempo, tem-se que,
dT 1 d 1d = v 2 dm = 2 dt Corpov v )dm ( dt 2 dt Corpo
.
(3.49)
Assumindo a invarincia da distribuio de massa, a taxa de variao da energia cintica em relao ao tempo pode ser expressa na forma,
dT 1 d 1 dv = dt ( v v)dm = 2 Corpo 2 v dt dm = Corpo adm v dt 2 Corpo
(3.50)
Pela segunda Lei de Newton, aplicada a cada elemento de massa dm , tem-se, por outro lado que
dF = adm
.
(3.51)
Particionando, ainda, o sistema de foras em externas e internas,
v adm = v dF = v dF ext + v dF int
.
(3.52)
Dinmica dos corpos rgidos
39
As duas parcelas da equao acima podem ser identificadas com a potncia das foras elementares externas e internas, dW ext e dW int , respectivamente. Assim, substituindo a expresso acima em (3.50) tem-se,
dT = v dF ext + v dF int = dW ext + dW int dt Corpo Corpo Corpo Corpo
(3.53)
que integrada no tempo, entre um instante inicial t 0 , arbitrariamente escolhido e um instante genrico t fornece,
T T0 = ext (t 0 ; t ) + int (t 0 ; t )
,
(3.54)
ou seja, a variao de energia cintica igual ao trabalho realizado pelas foras externas e internas entre os instantes considerados. Este enunciado conhecido como Teorema da Variao da Energia Cintica. Particularmente para um corpo rgido, no entanto, e dentro da validade do princpio de ao e reao da mecnica, o trabalho das foras internas se anula. A demonstrao deste fato, elementos pontuais relativamente simples. Considere, para tanto, dois constituintes do mesmo C.R., identificados
distintos,
respectivamente pelos pontos Pi e Pj .
Seja f ij = f ij
(P P ) = fi j
rijij
Pi Pj
rij
a fora de interao entre estes pontos, onde foi
implicitamente admitido vlido o Princpio de Ao e Reao da Mecnica, isto ,f ij = f ji .
Assim,
Dinmica dos corpos rgidos
40N N
int (t0 ; t ) = = =
int v dF dt = 0 Corpot
Corpo
int dP dF = lim N fij Pi = i =1 j i
N N N N Pi Pj 1 1 Pi Pj = , lim N fij Pi Pj = lim N f ij 2 2 Pi Pj i =1 j i i =1 j i
(
)
(
)
(
)
N N f ij 1 1 lim N Pi Pj 2 i = 1 j i P Pj 2 i
((
))2
onde o processo limite N deve ser entendido simultaneamente a V 0 , ondeV o volume do elemento de massa considerado. Da propriedade fundamental de
um C.R., pela qual a distncia relativa entre dois pontos quaisquer deste corpo invariante, ou seja, Pi Pj int (t 0 ; t ) = 0
(
)
2
= cte , segue a assertiva proposta, i.e.,
.
(3.55)
Exemplo 2.3 - Um disco homogneo de massa m e raio R rola sem escorregar em um plano inclinado. No instante inicial ele possuia velocidade angular 0 e estava na posio x0. Calcule a velocidade angular em funo da posio x, a acelerao& angular e as foras externas que agem sobre o disco.
x j i vG O
Dinmica dos corpos rgidos
41
Cinemtica = k
v G = v O + ( Rj)
como v O = 0v G = RiClculo da Energia Cintica T
T=
1 1 mv 2 + {} T [ J G ]{} G 2 2
[JG] o tensor de inrcia do disco em relao a eixos que passam por G e paralelos a i,j k. Como tais eixos so principais (simetria) tem-se: Jx [ JG ] = 0 0 0 Jy 0 0 0 Jz
Utilizando as equaes acima obtm-se: T= 1 2 (mR 2 + J Z ) 2
mR 2 , assim: Para um disco homogneo J z = 2 T= 3 mR 2 2 4
Clculo do trabalho das foras externas
A nica fora que realiza trabalho o peso. A fora de atrito atua sobre um ponto com velocidade nula e a fora normal perpendicular ao deslocamento. Assim:
Dinmica dos corpos rgidos
42
ext = mg ( x x 0 ) sen
Teorema da Variao da Energia Cintica T T0 = ext
2 = 2 + 0
4g ( x x 0 ) sen 3R 2
& Derivando a equao acima e observado que x = v G = R :& 2 =
4g & x sen 3R 2
& =
2g sen 3R
Clculo das reaes Utilizando o teorema do baricentro:ma G = F ext
& como a G = Ri :
& (mg sen fat )i + ( N mg cos ) j = mRiN = mg cos 1 fat = mg sen 3
Exemplo 2.4 - Um disco de massa m e raio R rola sem escorregar unido por uma barra a um anel de mesma massa e raio num plano inclinado. Calcular a acelerao do conjunto.
Dinmica dos corpos rgidos
43
x j i vG O
Cinemtica:Anel Disco v G = v G = vi
Anel = Disco = =v R
Clculo da Energia Cintica:T= 1 2 1 Disco 2 1 2 1 Anel 2 mv + J z + mv + J z 2 2 2 22
J zDisco J zAnel ) T = mv (1 + + 2R2 2R2
Como J zDisco =
mR 2 e J zAnel = mR 2 : 2
T=
7 2 mv 4
Clculo do trabalho das foras externas:
Dinmica dos corpos rgidos
44
Como no exemplo anterior, as nicas foras que realizam trabalho so as foras pesos. Assim:
ext = 2mg ( x x 0 ) sen
Teorema da Variao da Energia Cintica:
7 2 m(v 2 v 0 ) = 2mg ( x x 0 ) sen 42 v 2 = v0 +
8g ( x x 0 ) sen 7
& Observando que x = v & 2vv =
8g & x sen 7
& v=
4g sen 7
que a expresso procurada.
Dinmica dos corpos rgidos
45
Exemplo 2.5 - O pndulo composto abaixo possui massa m e momento de inrcia JG e parte do repouso da posio 0 . Calcule: a) em funo de b) comprimento efetivo do pndulo (lef)
O
a y G C x mg
a)
Sendo 2 = G
JG o raio de girao do corpo, tem-se: m
T=
1 1 1 2 J O 2 = ( J G + ma 2 ) 2 = m( G + a 2 ) 2 2 2 2
(0, t ) = ( 0 , ) = mg sen d = mga (cos cos 0 )0
Pelo Teorema da Variao da Energia Cintica: T T0 = ( 0 , )& Das condies iniciais (0) = 0 e (0) = 0 segue que:
2 =
2 ga (cos cos 0 ) ( + a 2 )2 G
Dinmica dos corpos rgidos
46
b) Para um pndulo simples, sabe-se que 2 =
2g (cos cos 0 ) . Por analogia, o l
comprimento efetivo de um pndulo composto o comprimento que um pndulo simples deveria ter para se comportar da mesma maneira. Assim: lef =
2 + a2 Ga
=
2 Ga
+a
Pela equao acima pode-se verificar que tanto faz o pndulo ser suspenso por um ponto O que dista a de G quanto por um ponto C que dista comprimento efetivo seria o mesmo, logo, teriam o mesmo comportamento.
2 Ga
; o
Exemplo 2.6 - Calcule a energia cintica de uma engrenagem cnica de um diferencial girando com velocidade angular em torno de seu eixo. A engrenagem possui massa m e suas dimenses esto indicadas na figura.
r2
i O j k r1
lCinemtica = j
Energia Cintica Tomando como plo para clculo da energia cintica qualquer ponto do eixo de rotao da engranagem, tem-se:
Dinmica dos corpos rgidos
47
T=
1 {} t [ J O ]{} 2
na qual [Jo] a matriz de inrcia com relao (O,i,j,k) indicados na figura. A frmula acima vlida pois o ponto O tem velocidade nula. Observando que (O,i,j,k) so eixo principais de inrcia (simetria) (3.12) se reduz a: T=
1 J z 2 2
r(z) z 0 l
dxPara o clculo de Jz, deve-se observar que a engrenagem composta por uma infinidade de discos de espessura diferencial dx e raio dado por: z r ( z ) = r2 (r2 r1 ) l
O momento de inrcia de um disco em torno do eixo Oz dado por dm. r 2 ( z ) dI z = Pela propriedade de composio da matriz de inrcia, Jz da 2 engrenagem dado por:
Jz =
Corpo
dI z =
r 2 ( z) dm 2 0
l
Dinmica dos corpos rgidos
48
Como dm = . . r 2 ( z ). dz sendo a densidade do material, a integral pode ser escrita como:
Jz =
0
l
2
r 4 ( z )dz
Realizando a mudana de varivel: dz = obtm-se: Jz = l dr r2 r1
l10(r2 r1 )
(r
5 2
r15
)
Observando que a massa m da engrenagem dada por: m=
Cormpo
dm = 3(r
l2
r1 )
(r
3 2
r13
)
obtm-se:5 5 3m r2 r1 Jz = 10 r23 r13
( (
) )
Assim, a energia cintica dada por:5 5 3m r2 r1 T= 2 3 3 20 r2 r1
( (
) )
Dinmica dos corpos rgidos
49
Exemplo 2.7 - Um carretel de massa M, momento de inrcia Jz em relao ao eixo Ak, raio maior R e raio menor r rola sem escorregar num plano horizontal. A ele liga-se um contrapeso de massa m. Considerando a polia e o fio ideais, calcule: a) acelerao do contrapeso b) acelerao angular do carretel c) trao no fio
x Jz, M iA
j
m v h
Cinemtica
v r A R O
Dinmica dos corpos rgidos
50
Observando a figura acima: vi = ( R + r )i
=
v R+r
v A i = Ri
Clculo da Energia Cintica T= 1 1 1 J z 2 + Mv 2 + mv 2 A 2 2 2
Utilizando as equaes acima:T= 1 J z + MR 2 + mv 2 2 2 ( R + r)
Clculo do trabalho das foras externas A nica fora que realiza trabaho o peso da massa m.
= mg (h h0 )
Teorema da Variao da Energia Cintica 1 J z + MR 2 2 + m.(v 2 v 0 ) = mg (h h0 ) 2 2 ( R + r)
& a) Derivando a equao acima, com h = v :
mg ( R + r ) 2 & v= J z + MR 2 + m( R + r ) 2
Dinmica dos corpos rgidos
51
b) Utilizando as relaes cinamticas:
& =
mg ( R + r ) J z + MR 2 + m( R + r ) 2
c)
T mgPara o contrapeso:
& mg T = mv
& Substituindo o valor de v :J z + MR 2 T = mg J z + MR 2 + m( R + r ) 2
Exemplo 2.8 - Um cilindro de massa m rola sem escorregar no interior de um tambor de raio R. O cilindro liberado do repouso da posio 0. Calcule a velocidade do cilindro em funo de e a reao vertical em B.
Dinmica dos corpos rgidos
52
R
r G
mgB C
Denotando a velocidade angular do cilindro e como no existe
& escorregamento, temos que v G = ( R r ) = r . Do Teorema da Energia Cintica:T= 1 13 3 J C 2 = mr 2 2 = mr 2 2 2 22 4
= mg sen ( R r )d = mg ( R r )(cos cos 0 )0
como T T0 = e w =2 vG =
vG r
4 g ( R r )(cos cos 0 ) 3
Dinmica dos corpos rgidos
53
n G
Fat
C mg N
Pela figura acima, aplicando o Teorema do Movimento do Baricentro,2 vG notando que a acelerao normal vale tem-se: ( R r)
m
2 vG = N mg cos ( R r)
Aplicando a expresso para vG obtida acima: 4 7 N = mg cos cos 0 3 3
Dinmica dos corpos rgidos
54
Exemplo 2.9 - Um pndulo composto formado por duas barras iguais de comprimento l e massa m unidas por articulaes ideais. Deduza uma relao entre as variveis 1, 2 e suas derivadas, sendo que no instante inicial as barras estavam
& & na posio inferior com velocidades angulares 1,0 e 2 ,0 .
j i O C1
1 2
C2
Cinemtica:& 1 = 1k & 2 = 2k
v C1 = v O + 1 (C1 O)& l v C1 = 1 (cos 1i + sen 1 j) 2
v A = v O + 1 ( A O)& v A = 1l (cos 1i + sen 1 j)v C 2 = v A + 2 (C2 A)
Dinmica dos corpos rgidos
55
& & l & & l v C 2 = ( 1l cos 1 + 2 cos 2 )i + ( 1l sen 1 + 2 sen 2 )i 2 2Clculo da Energia Cintica: T= 1 1 &2 1 1 & 2 2 mv C1 + J Z 1 + mv C 2 + J Z 2 2 2 2 2 2
na qual Jz tomado em relao ao centro de massa das barras. Como I z = ml 2 obtm-se, utilizando as relaes acima: 12
T=
ml 2 & 2 & 2 ml 2 & & (41 + 2 ) + 1 21 cos(1 2 ) 6 2
Clculo do trabalho das foras externas: As reaes nas articulaes (supostas sem atrito) no realizam trabalho. As nicas foras que realizam trabalho so os pesos das barras. O trabalho realizado igual variao de energia potencial, tomando a posio inicial (inferior) como referncia:
= =
mgl mgl (1 cos 1 ) + (1 cos 2 + 2.(1 cos 1 )) 2 2 mgl (4 3 cos 1 cos 2 ) 2
Assim, a relao procurada obtida pela aplicao do Teorema da Variao da Energia Cintica T T0 =
& & sendo T0 obtida substituindo as condies iniciais 1,0 e 2 ,0 na expresso daenergia cintica.
Dinmica dos corpos rgidos
56
Exemplo 2.10 - Um disco excntrico rola sem escorregar num plano horizontal. Sendo dados o raio R, excentricidade e, massa m, momento de inrcia JO e 0 = calcule: a) velocidade angular em funo de b) acelerao angular em funo de
2
e O R C N
G mg
j i
Fat
a) Energia Cintica:T= T= T= 1 1 J C 2 = J G + m R 2 + e 2 2eR cos 2 2 2 1 J O me 2 + m R 2 + e 2 2eR cos 2 2 1 J O + m R 2 2eR cos 2 2
(
(
))
( (
(
))
(
))
A nica fora que realiza trabalho o peso:
= mge sen d =mge(cos cos 0 )0
Pelo Teorema da Energia, considerando que (0) = T T0 = ( 0 , )
2
e ( 0) = 0 :
2 =
2mge cos J O + mR 2 2meR cos
Dinmica dos corpos rgidos
57
b) Derivando a expresso acima em relao ao tempo
& =
mge sen ( JO + mR 2 ) ( J O + mR 2 2meR cos ) 2
Dinmica dos corpos rgidos
58
4. MOMENTO ANGULAR DE UM CORPO RGIDO
4.1. MOMENTO ANGULAR E A MATRIZ DE INRCIA
Considere um corpo material, suposto rgido, de densidade de massa (r ) , onde
r = ( P O) o vetor de posio de um ponto P deste corpo a uma origem O,arbitrariamente escolhida. O momento angular de um elemento de massa dm(r ) = (r )dV , relativamente ao plo O, dado por,
& dK O = r rdm = r vdm = r v(r )dV
(4.1)
onde dV indica o elemento de volume ocupado pelo corpo, suposto invariante no tempo, consistentemente hiptese de corpo rgido. O momento angular do corpo em relao ao plo O pode ento ser posto na forma integral,
KO =
Corpo
dK O =
Corpo
(r v )dm = (r v )dVV
(4.2)
Tomando-se agora um ponto O, pertencente ao corpo, o vnculo cinemtico que caracteriza o campo de velocidades de um corpo rgido permite escrever,
Dinmica dos corpos rgidos
59
v = v O + ( P O ) = v O + r
(4.3)
de tal forma que o momento angular fica expresso como,
KO ==
Corpo
((O O) + r ) vdm = (O O) vdm +Corpo
Corpo
(r v O )dm + (r ( r ))dmCorpo
(4.4)
Apesar de arbitrariamente escolhido, O um ponto pertencente ao corpo bem determinado. Os dois primeiros termos da equao (4.4) podem ser reescritos, fatorando-se das integrais as parcelas que dependem de O, o que fornece,
K O = ( O O)
Corpo
vdm + r dm vCorpo
O
+
Corpo
( r ( r )) dm
(4.5)
A expresso (4.5) pode ser simplificada ainda mais. Da definio de centro de massa (ver (2.2)),
V
r dV = r dm =m(G O )Corpo
(4.6)
e tambm,
Q=
Corpo
vdm = mv
G
(4.7).
Portanto,
Dinmica dos corpos rgidos
60
K O = Q (O O ) + m(G O ) v O +
Corpo
( r ( r )) dm
(4.8)
Alternativamente, aplicando-se mais uma vez a frmula fundamental da cinemtica de um C.R., entre os pontos Oe G vem ento que
K O = m(O O) ( v O + (G O )) + m(G O ) v O += m(G O) v O + m(O O) ( (G O ) ) +
Corpo
( r ( r ))dm =(4.9)
Corpo
( r ( r )) dm
Note que se o ponto O for tomado coincidente com o centro de massa G, as expresses acima ficam simplificadas forma,
K O = Q (O G ) +
Corpo
( r ( r ))dm
(4.10)
Se, por outro lado O for tomado como o prprio O, a expresso (4.8) fica escrita
K O = m(G O ) v O +
Corpo
( r ( r )) dm
(4.11)
Este termo corresponde ao momento angular do corpo relativamente ao plo O, que executa um movimento rgido solidrio ao corpo. De (4.8) e (4.11), pode-se escrever, ainda que,
K O = K O + ( O O) Q
.
(4.12)
notvel a similaridade da identidade acima com a frmula de mudana de plo do momento de uma fora, ou com a frmula que expressa o vnculo cinemtico de corpo rgido. No presente caso a quantidade de movimento desempenha, matematicamente, o papel que a resultante R ocupa na frmula de mudana de plo e a funo que,
Dinmica dos corpos rgidos
61
analogamente, o vetor de rotao tem na expresso do vnculo cinemtico de um C.R. Esta similaridade no fortuita, obviamente. Vale citar que possvel construir toda um formalizao matemtica, luz da lgebra vetorial, a partir da definio de momento de uma entidade vetorial. Tomando-se, agora, um sistema (O , x , y , z ) de coordenadas cartesianas, com origem coincidente instantaneamente9 com O, tal que r = x i + y j + z k e = x i + y j + z k , pode-se verificar10 que,
r ( r ) = x y 2 y x y + x z 2 z z x i +y z
( +( +(
z 2 z y z + y x 2 x x 2 x z x + z y 2 y
) x y ) j + z y )k
(4.13)
( 2) As trs componentes cartesianas da segunda parcela K O =
Corpo
( r ( r ))dm
,
do momento angular K O , em (4.11), so ento dadas, respectivamente, por
K x K y Kz
( 2)
= x = x = x
Corpo
( yCorpo
2
+ z 2 dm y y
)
Corpo
x y dm x z dmz Corpo
(2)
y x dm + ( x Corpo y Corpo
2
+ z 2 dm z z
)
Corpo
y z dm
(4.14)
(2)
Corpo
z x dm z y dm + ( x Corpo
2
+ y 2 dm
)
As integrais que comparecem em (4.14) so prontamente identificveis como os momentos de massa de segunda ordem, calculados no sistema (O , x , y , z ) . Os
9
O referencial pode ou no ser solidrio ao corpo, como ser visto adiante. Lembre da identidade da lgebra vetorial a (b c) = b(a c) c(a b) , de onde resulta que2
10
r ( r ) = r r ( r ) .
Dinmica dos corpos rgidos
62
termos da diagonal principal, conforme visto anteriormente, so os momentos de inrcia J x , J y , J z respectivamente e os demais so os produtos de inrcia J x y , J y z , J x z . A equao (4.14) pode, portanto, ser posta na forma matricial,
K O
(2)
= [ J O ]{}
(4.15)
onde
[ J O ]
a matriz de inrcia do corpo, calculada segundo o sistema
(O , x , y , z ) . O momento angularna forma mista
K O , pode ser escrito, a partir de (4.11) e(4.15),
K O = (G O ) mv O + [ J O ]{}
(4.16)
e que, se levada em, (4.12), conduz forma geral,
K O = (G O ) mv O + [ J O ]{} + (O O) Q
(4.17)
So notveis os seguintes casos: (i) se O G ,
K O = (G O) Q + [ J G ]{}; se O G
;
(4.18)
(ii) se O O , com O um ponto do corpo, ou se v G = 0 , ou ainda se v G (O O) ,
K O = (G O ) mv O + [ J O ]{}; se v G (O O) = 0
;
(4.19)
Dinmica dos corpos rgidos
63
(iii) se v O = 0 ou se v O (G O )
K O = (O O) Q + [ J O ]{}; se v O (G O ) = 0
;
(4.20)
(iv) se O O e O um ponto fixo, tal que v O = 0 ,
K O = [ J O ]{}; se O O e v O = 0
;
(4.21)
(v) se for escolhido O G O
K G = [ JG ]{}; , vlida sempre
.
(4.22)
Esta ltima forma em geral reduz o trabalho algbrico, alm de facilitar a interpretao fsica. Estabelece que o momento angular de um corpo rgido em relao ao seu centro de massa pode ser definido como o produto entre sua matriz de inrcia e seu vetor de rotao. Note que a matriz de inrcia foi definida no sistema ( x , y , z ) , no necessariamente solidrio ao corpo, no entanto. H casos particulares em que a matriz de inrcia invariante relativamente a uma classe de sistemas no solidrios ao corpo. Estes casos exibem axisimetria na distribuio de inrcia e so, portanto, de fundamental importncia prtica. O pio simtrico o mais importante deles.
Dinmica dos corpos rgidos
64
4.2. TEOREMA DO MOMENTO ANGULARConsidere um corpo rgido em movimento e um referencial inercial. Considere, tambm, um plo O, em relao ao qual o momemento angular do corpo ser calculado. Tomando-se a expresso (4.2) dada na forma
KO =
Corpo
(( P O) v )dm
(4.23)
e derivando-se em relao ao tempo11 vem,
& KO =
Corpo
(( v v
O
) v )dm +
Corpo
(( P O) a )dm =(4.24)
= v O
Corpo
vdm +
Corpo
( P O) df
onde - df a fora de inrcia correspondente ao elemento diferencial de massa dm. Utilizando a expresso (4.7) e considerando que o sistema de foras internas equivalente a zero, segue, do Princpio de DAlembert, que,
ext ext & K O = mv G v O + M O = Q v O + M O
(4.25)
onde M ext o momento resultante do sistema de foras externas aplicadas ao corpo, O calculado em relao ao plo O. A equao (4.25) expressa o Teorema do Momento Angular (TMA):
11
(lembre que o corpo suposto rgido, portanto sua forma e distribuio de massa no variam com o tempo)
Dinmica dos corpos rgidos
65
A taxa de variao temporal do momento angular de um corpo rgido em relao a um plo O igual ao momento, em relao ao mesmo plo, de todas as foras externas sobre ele agentes somado ao produto vetorial de sua quantidade de movimento com a velocidade do plo considerado. Caso o plo considerado seja o prprio centro de massa o TMA assume a forma mais simples,
ext & K G = MG
(4.26)
A expresso acima evidencia o seguinte fato: se o momento das foras externas agentes sobre o corpo, calculado em relao ao centro de massa do corpo, for nulo, o momento angular relativamente a este mesmo centro ser invariante no tempo, i.e., uma constante. Diz-se, neste caso ento, da conservao do momento angular. Expresso anloga vlida quando o plo O fixo, ou mesmo quando este plo tem velocidade paralela velocidade do centro de massa,
ext & K O = M O ; se v G v O = 0
(4.27)
Por outro lado, tomando a expresso (4.17) e derivando-a em relao ao tempo, segue qued & K O = ( v G v O ) mv O + (G O) ma O + ([ J O ]{}) dt & + ( v O v O ) Q + ( O O) Q
que pode ainda ser simplificada e posta na forma
d & & K O = Q v O + (G O) ma O + ([J O ]{}) + (O O) Q . dt
(4.28)
Dinmica dos corpos rgidos
66
Identificando as expresses (4.25) e (4.28) segue, portanto, que,
ext & d (G O ) ma O + (O O) Q + ([ J O ]{}) = M O dt
,
(4.29)
ou, alternativamente:
(G O ) ma O + (O O) ma G +
d ext ([ J O ]{}) = M O dt
(4.30)
Considere agora o referencial do corpo, orientado por um sistema cartesiano com origem em O , em relao ao qual a matriz de inrcia seja invariante no tempo. Por certo este um referencial conveniente. O ltimo termo esquerda da equao (4.28) fica ento desenvolvido na forma, d ([J O ]{}) = ([J O ]{}) + d ([J O ]{})mov dt dt ,
onde o sub-ndice mov indica que a derivada temporal se faz no referencial mvel, no caso solidrio ao corpo. Como a matriz de inrcia invariante com relao ao sistema de referncias considerado, segue que, d ([J O ]{}) = ([J O ]{}) + [J O ] d ({})mov dt dt (4.31)
Assim, a equao (4.30) toma a forma,
& (O O) ma G + (G O) ma O + ([J O ]{}) + [J O ] Alternativamente,
{}
mov
ext = M O . (4.32)
Dinmica dos corpos rgidos
67
& (O O) R + (G O) ma O + ([J O ]{}) + [J O ] ou ainda,
{}
mov
ext = MO ,
(4.33)
ext & ([J O ]{}) + [J O ]{}mov = M O + (O O) R + (O G ) ma O .
Identificando, nos dois primeiros termos do segundo membro da equao acima, a prpria frmula de mudana de plo do momento de uma fora, do ponto O para o ponto O, segue tambm que,
ext & ([J O ]{}) + [J O ]{}mov = M O + (O G ) ma O
(4.34)
Note ainda que, como no presente caso o vetor de rotao de arrastamento o prprio vetor de rotao do corpo, ou seja, o referencial solidrio ao corpo, no necessrio distinguir a derivada temporal no que diz respeito ao referencial adotado12. Neste caso a equao acima poderia ser escrita,
ext & ([J O ]{}) + [J O ]{} = M O + (O G ) ma O
(4.35)
Esta forma de apresentar o Teorema do Momento Angular conhecida como equao de Euler, em homenagem ao grande mecanicista e matemtico alemo. A escolha O G , mais uma vez, bastante conveniente. De fato, com O G e de (4.22) substituda em (4.34), tem-se a expresso mais simples, mas nem por isso menos geral,
12
d d & De fato, = ( )mov + = ( )mov . dt dt
Dinmica dos corpos rgidos
68
& K G + [J G ]
{}
mov
ext = MG
(4.36)
Esta escolha , em geral, a mais adequada. Outro caso especfico que merece destaque , O O um ponto fixo, ou quando (G O) a O 0 , vale ento:
& K O + [J O ]
{}
mov
ext = M O ;
(4.37)
4.2.1.
Casos Particulares
importante enfatizar que a escolha de um referencial rigidamente solidrio ao corpo , em geral, a mais natural, posto que em relao a este referencial a matriz de inrcia invariante. Caso contrrio a passagem algbrica, envolvendo a derivada temporal, que conduz equao (4.31) no mais seria vlida. Em outras plavaras, seria necessrio calcular, a cada instante, a taxa de variao da matriz de inrcia em relao ao tempo. Existem casos particulares, no entanto, em que a matriz de inrcia tambm invariante em relao a um referencial outro, no solidrio ao corpo. Um exemplo importantssimo quando existe axi-simetria de distribuio de massa do corpo. Neste caso a matriz de inrcia invariante em relao a qualquer sistema que tenha como um dos eixos o eixo de simetria. Este eixo , evidentemente, um eixo principal de inrcia13. Ou seja, a matriz de inrcia invariante, qualquer que seja a posio relativa do corpo, em torno do eixo de simetria. A figura abaixo, mostrando um cone em movimento, permite visualizar a assertiva acima.
13
Cuidado: a recproca em geral no verdadeira.
Dinmica dos corpos rgidos
69
z Z G mg zG y Y
x
X
Figura 4 Cone em movimento em torno de um ponto fixo.
No sistema (O, x, y, z ); com Oz como o eixo de simetria de massa, por exemplo, sistema este porm no solidrio ao corpo e caracterizado cinematicamente por um vetor de rotao ar , a matriz de inrcia invariante no tempo, pois independe da rotao do corpo em torno deste eixo. A equao (4.34) ficaria dada ento na forma,
ext & ar ([J O ]{}) + [J O ]{}mov = M O + (O G ) ma O
,
(4.38)
e, a forma mais simples, (4.36), como
ext & ar K G + [J G ]{}mov = M G
.
(4.39)
Dinmica dos corpos rgidos
70
4.2.2.
Notao Matricial Alternativa
Com o intuito de eliminar a notao mista, utilizada at ento, interessante introduzir uma notao alternativa, matricial. Alm da vantagem de tornar compacta a apresentao das equaes, esta notao tem a virtude da elegncia, na medida em que homognea na forma. Para tanto, considere o produto vetorial de dois vetores quaisquer p = p x , p y , p z e q = q x , q y , q z
(
)
(
)
do espao vetorial V 3 , expressos em
coordendas cartesianas. Podemos definir a matriz
0 [P] = pz p y
pz 0 px
py px 0
(4.40)
e analogamente para q de tal sorte que existe a seguinte equivalncia matemtica,
p q = [P]{q}
.
(4.41)
Dentro desta notao alternativa e tomando como exemplo de aplicao a equao(4.34), tem-se,
ext & [ ][ J O ]{} + [ J O ]{} = {M O } m[RG ]{a O }
(4.42)
onde ,
0 [ ] = z y e
z 0 x
y x 0
,
(4.43)
Dinmica dos corpos rgidos
71
0 [RG ] = zG y G
zG 0 xG
yG xG 0
(4.44)
Esta forma de expresso , evidentemente, muito prtica quando implementaes computacionais so consideradas. A matriz (4.43) a matriz de rotao. A equao (4.36), quando O G , fica ainda mais simples,ext & []{K G }+ [J G ]{}mov = {M G }
.
(4.45)
4.2.3.
Relao entre Movimento
Energia
Cintica
e
Quantidade
de
A expresso geral da energia cintica pode ser escrita, na notao alternativa introduzida na seo anterior, como
T=
1 1 t t t m{v O } {v O } + m{} [R ]{v O } + {} [ J O ]{} = G 2 2 1 1 t t t = m{v O } {v O } + m{R } [ v O ]{} + {} [ J O ]{} = G 2 2 1 1 t t t = m{v O } {v O } + m{v O } [ ]{R } + {} [ J O ]{} G 2 2
(4.46)14
O primeiro termo uma forma quadrtica na velocidade do ponto O, ponto este pertencente ao corpo, e tomado como referncia. O terceiro e ltimo termo uma forma bi-linear no vetor de rotao, reduzindo-se a uma forma puramente quadrtica
14
Note, no segundo termo, a permutao cclica do produto misto, aqui escrito na forma matricial.
Dinmica dos corpos rgidos
72
quando a matriz de inrcia principal (diagonal). A segunda parcela de natureza mista, envolvendo o vetor de rotao e o vetor de velocidade de O. ento imediato verificar que a derivada parcial da energia cintica com relao a cada uma das componentes do vetor de rotao nada mais do que a correspondente componente do momento angular K O . De fato, o momento angular, dado na forma (4.16), se escrito na notao matricial fica,
{K O } = m[R G ]{v O } + [ J O ]{}
.
(4.47)
que constitui, explicitamente, um vetor formado pelas derivadas parciais da energia cintica com respeito a cada uma das componentes do vetor de rotao, ou seja,
( ) i
T
= ( m(G O ) v O ) i + ([ J O ]{}) i ;
i = x, y, z
ou, alternativamente, na forma matricial,
.
(4.48)15
T T = = K O i
Tal fato era esperado, na medida em que, como foi visto, tanto a energia cintica quanto o momento angular so constitudos por parcelas que podem ser expressas atravs da matriz de inrcia, do vetor de rotao e da velocidade do ponto tomado como plo de referncia. Analogamente, existe uma relao entre as derivadas parciais da energia cintica em relao s componentes da velocidade do ponto O e as componentes do vetor de
15
A notao f q , aqui empregada, onde q um vetor, indica um outro vetor, do mesmo espao vetorial, formado pelas trs derivadas parciais da funo escalar f(q) em relao a cada uma das componentes de q.
Dinmica dos corpos rgidos
73
quantidade de movimento. Basta derivar a expresso da Energia Cintica, ou sua forma alternativa (4.46)a, para obter-se,
( v O ) i
T
= m( v O ) i + m( (G O )) i = m( v G ) i = (Q) i ; i = x , y , z
ou, alternativamente, na forma matricial T T = = m{v O } + m[ ]{R } = Q G v O ( v O ) i
(4.49)
Na realidade, as expresses acima so casos especiais de relaes muito mais gerais entre quantidade de movimento (momentum) e momento angular (momento do
momentum) e as coordenadas de velocidade (velocidades generalizadas) de umsistema mecnico arbitrrio. Estas relaes so em geral deduzidas no mbito da Teoria de Mecnica Analtica, abordagem que foge do escopo do presente texto (ver, p.ex., Goldstein, ou Landau & Lifshitz, ou ainda, Sommerfeld). Desempenham, naquele contexto, papel essencial, no entanto.
4.2.4.
Binrio Giroscpico
esquerda da expresso (4.36) comparecem dois termos. O segundo de interpretao imediata: trata-se da parcela da taxa de variao temporal do momento angular associada variao da intensidade do vetor de rotao no tempo, variao esta vista no referencial solidrio ao corpo, o qual se movimenta com rotao . Mantendo o segundo termo no primeiro membro da referida equao, pode-se reescrev-la como,
ext & [J G ]{}mov = M G K G
,
(4.50)
ou ainda, em notao matricial,
Dinmica dos corpos rgidos
74
ext & [J G ]{}mov = {M G } []{K G }
.
(4.51)
Esta forma particularmente til, na medida que propicia fcil interpretao. De fato, a taxa de variao temporal do vetor de rotao, quando vista do referencial noinercial, caracterizado pelo vetor de rotao , proporcional ao momento das foras externas (aqui calculado em relao ao centro de massa) subtrado de uma segunda parcela. Esta segunda parcela corresponde ao termo G K G []{K G } , conhecido como binrio giroscpico ou conjugado giroscpico. Representa a parcela da taxa de variao temporal do vetor de momento angular que corresponde variao de sua direo, variao esta associada rotao. O nome giroscpico, portanto, est relacionado sua origem: a rotao do sistema de referncia. O termo com sinal invertido G = K G []{K G } pode ser interpretado como o momento giroscpico reativo aplicado pelo corpo sobre o sistema externo que nele age. Efeitos giroscpicos so, portanto, aqueles decorrentes da ao de binrios giroscpicos. Note que os efeitos giroscpicos so de natureza conservativa. De fato, tomando o produto escalar do momento giroscpico G com o vetor de rotao resulta
G = ( K G ) = 0
,
(4.52)
mostrando que a potncia (portanto o trabalho) desenvolvida pelo binrio giroscpico nulo por construo. A caracterstica conservativa do efeito giroscpico pode tambm ser associada antissimetria da transformao associada pr-multiplicao do vetor de velocidade angular pela matriz antissimtrica [ ] , e posterior multiplicao pelo prprio vetor de
Dinmica dos corpos rgidos
75
rotao, desde que seja lembrado que transformaes antissimtricas levam conservao de energia, no contexto da mecnica.16
Na realidade este um raciocnio
algo redundante, na medida em que a antissimetria da matriz [ ] decorre da prpria antissimetria (permutao cclica) do produto vetorial. O conceito de binrio giroscpico pode, ainda, ser entendido como integrante de uma classe mais geral, a de foras de inrcia, onde se incluem, por exemplo, a fora centrfuga17, que comparece em qualquer movimento curvilneo de um ponto material, e a fora de Coriolis, no estudo do movimento relativo de um ponto material em um sistema de referncia que apresenta rotao. Alm de conservativo, o efeito giroscpico apresenta natureza restauradora, na medida em que representa uma certa resistncia inercial uma variao imposta ao momento angular. Esta natureza restauradora responsvel por um sem nmero de efeitos estabilizadores, como ser visto nas sees subsequentes.
4.2.5.
Suplemento: Adoo do Referencial Terrestre
Assim como no caso da aplicao do Teorema do Movimento do Baricentro, cabem aqui algumas consideraes atinentes adoo do referencial terrestre enquanto sistema de referncias primrio, em relao ao qual o movimento seria medido. O sistema de referncias fixo na Terra , como j observado, no-inercial. O Teorema do momento Angular foi no entanto deduzido considerando o movimento medido a partir de um referencial Newtoniano, ou inercial. Os efeitos da rotao da Terra podem vir a ser relevantes em agumas situaes particulares como, por exemplo, no estudo da dinmica de um girocompasso, instrumento dedicado a apontar o Norte Verdadeiro a partir do efeito giroscpico proporcionado pela prpria rotao do globo terrestre, como ser visto com maiores detalhes em sees posteriores. Em grande parte dos casos de interesse do dia-a-dia, no entanto, estes efeitos so em geral desconsiderveis, porquanto representam parcela quantitativamente insignificante dos efeitos de inrcia.
16
O leitor mais interessado poder verificar que se o operador tiver parte simtrica, definida positiva, esta ser responsvel pela dissipao de energia. Ver, p.ex., Sommerfeld, art. 10.
17
Dinmica dos corpos rgidos
76
Considere ento, o referencial S fixo na Terra como referencial primrio18. Um segundo referencial S, solidrio ao corpo, ser tomado para o estudo a seguir. Seja
e o vetor de rotao da Terra, ou seja do sistema de referncia S e r o vetor derotao do corpo rgido em estudo relativamente a S, i.e., do sistema S em relao a
S. O vetor de rotao absoluto do C.R. ser ento dado por,
= e + r
.
(4.53)
Considere O um ponto genrico do eixo de rotao do globo e O um ponto
pertencente ao C.R. O Teorema do Momento Angular, na forma da equao de Euler,(4.36), fica escrito no caso em estudo,
ext & ( e + r ) ([ J O ]( { e } + { r }) ) + [ J O ]{ r } = M O (G O ) ma O ,
(4.54)
onde foi considerada como desprezvel, a taxa de variao do vetor de rotao da Terra, (e de fato o , na escala de tempo caracterstica dos fenmenos de maior interesse da engenharia). Na forma matricial equivalente, (4.42), a equao acima fica escrita,
& ([ ] + [ ])[ J ]({ } + { }) + [ J ]{ } = {M } m[R ]{a } .e r O e r O r
ext O
G
O
(4.55)
Portanto, isolando-se no primeiro membro da equao, os termos que dependem apenas de r , segue
18
O globo terrestre suposto um corpo rgido. Na realidade sua deformabilidade e os movimentos de grandes massas fluidas acabam por interferir em sua dinmica. O estudo destes efeitos , no entanto, so de maior relevncia Geofsica e aqui sero desconsiderados.
Dinmica dos corpos rgidos
77
ext & [ r ][ J O ]{ r } + [ J O ]{ r } = {M O } m[R G ]{a O } ([ e ][ J O ]{ r } + [ r ][ J O ]{ e } + [ e ][ J O ]{ e })
. (4.56)
Note que, normalizando com respeito a r , e se e r O( ) , ento o primeiro e segundo termos da parcela entre parnteses, no lado direito da equao, sero, em geral, de ordem O( ) , e o ltimo termo ser de ordem O( 2 ) . Cabe ressaltar, no entanto que este fato nem sempre verdadeiro. Considere, como contra-exemplo, um caso que apresente quase-simetria esfrica. Nesta situao, a matriz de inrcia, alm de diagonal, tem seus elementos praticamente idnticos. Fica claro, ento que o primeiro termo do primeiro membro ser muito pequeno (trata-se afinal de umproduto vetorial de dois vetores quase-paralelos) e, contudo, se e r 0 , i.e., se os vetores de rotao forem praticamente perpendiculares entre si, os termos de ordem podem se tornar relevantes, mormente quando os momentos externos forem muito pequenos. Ou seja, nesta situao particular de quasi-simetria esfrica, tem-se,ext & [J O ]{ r } {M O } m[R G ]{a O } ([ e ][J O ]{ r } + [ r ][J O ]{ e })
Isto posto, tem-se, por outro lado, que a acelerao do ponto O em relao ao sistema
S dada por
a O = a O r + e ( e ( O O ) ) + 2 e v O
{a Or } + [ e ][ e ]{rO } + 2[ e ]{v Or } = {a O }
,
(4.57)
com {rO } = (O O) e onde foi desprezada a variao temporal do vetor de rotao da Terra e a acelerao de O foi desconsiderada. O segundo termo a parcela centrpeta da acelerao de arrastamento e o ltimo termo a conhecida acelerao de Coriolis. Assim, o segundo termo do segundo membro de (4.56) fica,
Dinmica dos corpos rgidos
78
m[R ]{a O } = m[R ]( {a Or } + [ e ][ e ]{rO } + 2[ e ]{v Or }) G G
.
(4.58)
Ainda, o termo correspondente ao momento resultante das foras externas ser decomposto em duas parcelas. A primeira, associada ao gravitacional. A segunda, M O , a todas as outras foras externas agentes sobre o corpo. Como visto anteriormente, a medida do peso j incorpora a fora centrfuga associada rotao da Terra (ver (2.11). Portanto,
M ext = (G O ) (P C) + M O O ou, na forma matricial,
(4.59)
{M } = [R ]({P} {C}) + {M }ext O G O
.
(4.60)
A fora de inrcia, centrfuga, C dada por
C = m e ( e (G O)) = m e ( e (G O )) m e ( e (O O)) m([ e ][ e ]{R } + [ e ][ e ]{rO }) = {C} G
,
(4.61)
e, portanto,
{M } = [R ]{P} + m[R ]([ ][ ]{R } + [ ][ ]{r }) + {M }ext O G G e e G e e O O
(4.62)
Substituindo, portanto, (4.62) e (4.58) em (4.56), vem, finalmente,
Dinmica dos corpos rgidos
79
& [ r ][ J O ]{ r } + [ J O ]{ r } = {M O } + [R G ]{P} m[R G ]{a Or } + + m[R ][ e ][ e ]{R } 2m[R ][ e ]{v Or } G G G ([ e ][ J O ]{ r } + [ r ][ J O ]{ e } + [ e ][ J O ]{ e })
. (4.63) A expresso acima separa os efeitos da rotao da Terra e da rotao do corpo a ela relativa. Note que tem carter bastante geral. No segundo membro, o primeiro termo corresponde ao momento resultante das foras externas de origem no-gravitacional. O segundo termo, ao momento associado fora peso. Os demais termos esto associado a foras de inrcia. O terceiro, ao momento da fora de inrcia correspondente acelerao relativa do ponto O. O quarto termo um diferencial de momento da fora centrfuga. O quinto termo corresponde ao momento da fora de Coriolis. Os termos restantes so binrios giroscpicos envolvendo o vetor de rotao da Terra. Se o ponto O, pertencente ao corpo, for tomado como o centro de massa G, a expresso acima simplifica-se sobremaneira, pois, neste caso, {R } (G O ) = 0 . G Assim& [ r ][ J O ]{ r } + [ J O ]{ r } = {M O } ([ e ][ J O ]{ r } + [ r ][ J O ]{ e } + [ e ][ J O ]{ e })
. (4.64) Em alguns outros caso de interesse, quando a rotao relativa se faz em torno de um eixo fixo relativamente Terra, pode ser conveniente tomar o ponto O de referncia como um ponto deste eixo. Em outros casos ainda, quando existir um nico ponto fixo relativamente Terra, este ser, evidentemente o ponto de referncia adequado. Nestes dois casos {v Or } = {a Or } = {0} , e portanto, (4.63) fica,
Dinmica dos corpos rgidos
80
& [ r ][ J O ]{ r } + [ J O ]{ r } = {M O } + [R G ]{P} + + m[R ][ e ][ e ]{R } G G ([ e ][ J O ]{ r } + [ r ][ J O ]{ e } + [ e ][ J O ]{ e })
. (4.65) Exemplos destes casos particulares so rotores de eixos com jazentes em bases fixas ao solo, giroscpios com base fixa, rotores com mancais esfricos instalados em base fixa, alm do clssico problema do pio. Os termos quadrticos em ( e ) so quasesempre desprezveis, de ordem superior. A equao acima se reduz ento, no mnimo, a
& [ r ][ J O ]{ r } + [ J O ]{ r } {M O } + [R G ]{P} + ([ e ][ J O ]{ r } + [ r ][ J O ]{ e })
.
(4.66)
Note, ainda que se no houver simetria esfrica de massa (ou ao menos quasesimetria), os termos linearmente dependentes em e podero, em geral, ser desconsiderados, e a equao ser reduzida ainda mais, na forma
& [ r ][ J O ]{ r } + [ J O ]{ r } {M O } + [R G ]{P}
.
(4.67)
que preserva a forma original da equao de Euler (4.44) ((4.42)na forma alternativa).
Dinmica dos corpos rgidos
81
Exemplo 3.11 - Para o pndulo composto analisado no exemplo 2.5 determinar as reaes na articulao O. Teorema da Resultante ma G = R + P
& & Da cinemtica a G = 2 ai + aj . Sendo =
g sen tem-se: lef
Rx = ma mg cos2
por reeultados anteriores
=
2a 2a mg cos 1 + cos 0 lef lef
a & R y = ma + mg sen = mg sen 1 l ef Rz = 0
Para o clculo dos momentos em O, deve-se utilizar a equao de Euler, notando que o referencial solidrio ao corpo:
& [ J G ]{ } + [ I G ]{ } = M ext GO O Sendo M ext = ( M x , M y , M zO Ry a ) T , substituindo resultados anteriores na G
equao acima obtm-se:G M xO = J xz
g sen G g 2 J yz (cos cos 0 ) lef lef
O My =
g G G 2 J xz cos J yz sen lef
(
)
M zO = 0O O Para simetria em relao ao plano xy M x = M y = 0 .
Dinmica dos corpos rgidos
82
Exemplo 3.12 - Considerando o disco excntrico do exemplo 2.10, utilize o TMA para calcular a velocidade angular em funo de . Considerando como plo para a aplicao do TMA o ponto A do plano que em cada instante coincide com o ponto de contato C do disco. O TMA se escreve, ento:
& K A = mv G v A + M ext AUtilizando: K A = (G A ) mv A + [ J A ]{} + ( A A) Q , tomando A como o ponto C do disco (vC=0), tem-se: K A = J Ck = J O + m R 2 2eR cos k
(
(
))
& & v G = (e cos R)i + e sen j & v A = RiM ext = mge sen k A Logo:& && & 2meR 2 sen + ( JO + mR 2 2meR cos ) = m