D =[u,v, - digilib.its.ac.id · = I yz = 0) 2. Mode heave, roll dan pitch dapat diabaikan ( ω = p...
11
1 PERANCANGAN SISTEM KENDALI LINTASAN KAPAL BERBASIS LOGIKA FUZZY : STUDI KASUS KEPULAUAN RIAU (Illa Rizianiza, Dr .Ir. Aulia Siti Aisjah, MT, Dr.Ir.A.A Masroeri, M.Eng) Jurusan Teknik Fisika – Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember Kampus ITS, Keputih – Sukolilo, Surabaya 60111 Abstrak Tujuan dari Tugas Akhir ini adalah merancang kendali untuk pemenuhan lintasan kapal berbasis logika fuzzy. FPB 57 merupakan kapal cepat yang digunakan untuk patroli dan pengejaran. Selama proses patroli menggunakan autopilot, dimana lintasan kapal telah ditentukan sebelumnya. Salah satu wilayah perairan Indonesia yang perlu ditingkatkan pertahanan keamanan maritim adalah Kepulauan Riau, karena 95% wilayahnya adalah lautan dan merupakan jalur padat pelayaran. Untuk itu perlu dirancang sistem kendali dengan tujuan pemenuhan lintasan untuk meningkatkan maneuver kapal dalam berpatroli. Perancangan kendali lintasan ini berbasis logika fuzzy menggunakan metode mamdani dengan 3 masukan yaitu error yaw, yawrate, error lintasan dan 1keluaran yaitu sinyal command rudder. Simulasi dilakukan terhadap kendali fuzzy yang telah dirancang dengan dipengaruhi gangguan gelombang sesuai kondisi lautan di Kepulauan Riau. Berdasarkan hasil simulasi, kendali yang telah dirancang mampu memenuhi lintasan sesuai yang diinginkan, tetapi masih terdapat error lintasan rata-rata sebesar 17,12m dan 25,76m. Sistem pengendalian yang telah dirancang dapat pula digunakan untuk simulasi dengan berbagai koordinat lintasan, tidak hanya di Kepualaun Riau. Kata Kunci: Kepulauan Riau; Kendali logika fuzzy; mamdani; pemenuhan lintasan; gelombang 1. PENDAHULUAN 1.1 Latar Belakang Sebagai negara kepulauan yang sebagian besar wilayahnya adalah lautan, Indonesia membutuhkan sistem pertahanan keamanan yang kuat untuk menjaga keutuhan wilayah perairan. Salah satu cara yang telah dilakukan adalah pembuatan kapal cepat FPB. Kapal tersebut digunakan untuk berpatroli di daerah yang dianggap rawan dalam hal keamanan perairan Indonesia contohnya Kepulauan Riau. Kepulauan Riau merupakan jalur padat pelayaran dan gerbang wisata mancanegara kedua setelah Pulau Bali yang letaknya berbatasan dengan negara lain. Kapal cepat FPB (Fast Patrol Boat ) adalah salah satu jenis kapal cepat yang kebanyakan dibuat untuk kepentingan militer. Saat ini dengan adanya kemajuan teknologi maka perlu dilakukan pengembangan sistem navigasi kapal. Pengembangan banyak dilakukan dalam upaya menciptakan sebuah sistem kendali otomatis yang dapat mengurangi resiko kecelakaan sebuah kapal. Salah satunya adalah membuat sistem kendali kapal di Kepulauan Riau tepatnya di Selat Riau yaitu selat yang memisahkan. Pada penelitian tugas akhir ini akan dikembangkan suatu sistem kendali lintasan berbasis kepakaran dengan menggunakan logika fuzzy. 1.2 Permasalahan Permasalahan dalam penyusunan tugas akhir ini adalah bagaimana merancang sistem kendali lintasan pada kapal cepat yang berbasis logika fuzzy sehingga mampu memenuhi pencapaian target pemenuhan lintasan (track keeping). 1.4 Tujuan Penelitian Tujuan penelitian dalam tugas akhir ini adalah untuk merancang sebuah sistem kendali lintasan pada kapal cepat yang berbasis logika fuzzy sehingga mampu memenuhi pencapaian target pemenuhan lintasan (track keeping). .1.3 Batasan Masalah Adapun yang menjadi batasan masalah dalam tugas akhir ini adalah: 1. Kapal yang digunakan sebagai studi kasus adalah kapal cepat FPB 57 2. Lintasan yang digunakan sebagai studi kasus adalah lintasan pada Selat Riau yang memisahkan Pulau Batam dan Pulau Bintan di Kepulauan Riau. Lintasan ini diasumsikan sudah berdasarkan jalur pelayaran Dinas Perhubungan Kepulauan Riau 3. Metode dasar perancangan sistem pengendalian berdasarkan logika fuzzy 4. Variabel yang dikendalikan adalah sudut yaw 5. Perancangan sistem pengendalian dilakukan secara simulasi dengan sofware bantu matlab versi R2008a. 1.5 Metodologi Penelitian Dalam perancangan ini, langkah yang dilakukan untuk mencapai tujuan penelitian adalah sebagai berikut : 1. Studi literatur 2. Pengambilan data 3. Pemodelan dinamika kapal 4. Pemodelan gangguan kapal 5. Penentuan lintasan kapal 6. Perancangan kendali 7. Pengujian dan analisa 8. Kesimpulan 9. Penyusunan dan penulisan laporan 2. TEORI PENUNJANG 2.1 Fungsi alih dari dinamika kapal. Bentuk umum persamaan manuvering kapal dinyatakan dalam bentuk : L τ υ ν = D M & (2.1) dengan τ ] , , [ r v u v = merupakan vektor kecepatan. M dan D merupakan matrik inersia dan redaman yang diperoleh dari linierisasi persamaan gaya dan
Transcript of D =[u,v, - digilib.its.ac.id · = I yz = 0) 2. Mode heave, roll dan pitch dapat diabaikan ( ω = p...
1
PERANCANGAN SISTEM KENDALI LINTASAN KAPAL BERBASIS LOGIKA FUZZY : STUDI KASUS KEPULAUAN RIAU
(Illa Rizianiza, Dr .Ir. Aulia Siti Aisjah, MT, Dr.Ir.A.A Masroeri, M.Eng)
Jurusan Teknik Fisika – Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember
Kampus ITS, Keputih – Sukolilo, Surabaya 60111
Abstrak Tujuan dari Tugas Akhir ini adalah merancang kendali untuk pemenuhan lintasan kapal berbasis logika fuzzy.
FPB 57 merupakan kapal cepat yang digunakan untuk patroli dan pengejaran. Selama proses patroli menggunakan autopilot, dimana lintasan kapal telah ditentukan sebelumnya. Salah satu wilayah perairan Indonesia yang perlu ditingkatkan pertahanan keamanan maritim adalah Kepulauan Riau, karena 95% wilayahnya adalah lautan dan merupakan jalur padat pelayaran. Untuk itu perlu dirancang sistem kendali dengan tujuan pemenuhan lintasan untuk meningkatkan maneuver kapal dalam berpatroli. Perancangan kendali lintasan ini berbasis logika fuzzy menggunakan metode mamdani dengan 3 masukan yaitu error yaw, yawrate, error lintasan dan 1keluaran yaitu sinyal command rudder. Simulasi dilakukan terhadap kendali fuzzy yang telah dirancang dengan dipengaruhi gangguan gelombang sesuai kondisi lautan di Kepulauan Riau. Berdasarkan hasil simulasi, kendali yang telah dirancang mampu memenuhi lintasan sesuai yang diinginkan, tetapi masih terdapat error lintasan rata-rata sebesar 17,12m dan 25,76m. Sistem pengendalian yang telah dirancang dapat pula digunakan untuk simulasi dengan berbagai koordinat lintasan, tidak hanya di Kepualaun Riau.
Kata Kunci: Kepulauan Riau; Kendali logika fuzzy; mamdani; pemenuhan lintasan; gelombang 1. PENDAHULUAN 1.1 Latar Belakang
Sebagai negara kepulauan yang sebagian besar wilayahnya adalah lautan, Indonesia membutuhkan sistem pertahanan keamanan yang kuat untuk menjaga keutuhan wilayah perairan. Salah satu cara yang telah dilakukan adalah pembuatan kapal cepat FPB. Kapal tersebut digunakan untuk berpatroli di daerah yang dianggap rawan dalam hal keamanan perairan Indonesia contohnya Kepulauan Riau. Kepulauan Riau merupakan jalur padat pelayaran dan gerbang wisata mancanegara kedua setelah Pulau Bali yang letaknya berbatasan dengan negara lain. Kapal cepat FPB (Fast Patrol Boat ) adalah salah satu jenis kapal cepat yang kebanyakan dibuat untuk kepentingan militer. Saat ini dengan adanya kemajuan teknologi maka perlu dilakukan pengembangan sistem navigasi kapal.
Pengembangan banyak dilakukan dalam upaya menciptakan sebuah sistem kendali otomatis yang dapat mengurangi resiko kecelakaan sebuah kapal. Salah satunya adalah membuat sistem kendali kapal di Kepulauan Riau tepatnya di Selat Riau yaitu selat yang memisahkan. Pada penelitian tugas akhir ini akan dikembangkan suatu sistem kendali lintasan berbasis kepakaran dengan menggunakan logika fuzzy. 1.2 Permasalahan
Permasalahan dalam penyusunan tugas akhir ini adalah bagaimana merancang sistem kendali lintasan pada kapal cepat yang berbasis logika fuzzy sehingga mampu memenuhi pencapaian target pemenuhan lintasan (track keeping). 1.4 Tujuan Penelitian
Tujuan penelitian dalam tugas akhir ini adalah untuk merancang sebuah sistem kendali lintasan pada kapal cepat yang berbasis logika fuzzy sehingga mampu memenuhi pencapaian target pemenuhan lintasan (track keeping). .1.3 Batasan Masalah
Adapun yang menjadi batasan masalah dalam tugas akhir ini adalah:
1. Kapal yang digunakan sebagai studi kasus adalah kapal cepat FPB 57
2. Lintasan yang digunakan sebagai studi kasus adalah lintasan pada Selat Riau yang memisahkan Pulau Batam dan Pulau Bintan di Kepulauan Riau. Lintasan ini diasumsikan sudah berdasarkan jalur pelayaran Dinas Perhubungan Kepulauan Riau
3. Metode dasar perancangan sistem pengendalian berdasarkan logika fuzzy
4. Variabel yang dikendalikan adalah sudut yaw 5. Perancangan sistem pengendalian dilakukan
secara simulasi dengan sofware bantu matlab versi R2008a.
1.5 Metodologi Penelitian Dalam perancangan ini, langkah yang
dilakukan untuk mencapai tujuan penelitian adalah sebagai berikut :
1. Studi literatur 2. Pengambilan data 3. Pemodelan dinamika kapal 4. Pemodelan gangguan kapal 5. Penentuan lintasan kapal 6. Perancangan kendali 7. Pengujian dan analisa 8. Kesimpulan 9. Penyusunan dan penulisan laporan
2. TEORI PENUNJANG 2.1 Fungsi alih dari dinamika kapal. Bentuk umum persamaan manuvering kapal dinyatakan dalam bentuk :
Lτυν =+ DM & (2.1)
dengan τ],,[ rvuv = merupakan vektor kecepatan.
M dan D merupakan matrik inersia dan redaman yang diperoleh dari linierisasi persamaan gaya dan

2
momen pada arah surge, sway dan yaw. Persamaan kecepatan dan sistem kemudi kapal akan sesuai berdasarkan beberapa asumsi, yaitu: 1. Distribusi massa homogen dan bidang xz simetris (Ixy
= Iyz = 0) 2. Mode heave, roll dan pitch dapat diabaikan (ω = p = q = ω& = p& = q& = 0 )
Kemudian gunakan asumsi diatas ke dalam persamaan :
Surge : m(u& – νr – xGr2) =X (2.3)
Sway:m(ν& +ur+ rxG & )=Y (2.4)
Yaw : Iz r& + mxG(ν& + ur) =N (2.5) 2.2Fungsi alih dari kapal
Model Plant dari dinamika manuvering kapal didapatkan dari pendekatan yang dilakukan oleh Nomoto (1957) sebagai bentuk matematis orde 1 dan 2. Di bawah ini adalah fungsi alih dari model Nomoto :
( ) ( )( )( )sTsTs
sTKs R
R 21
3
11
1
+++
=δψ
(2.6)
Parameter – parameter dari fungsi alih diatas diperoleh dari
( )( )N
MTT
det
det21 = (2.7)
)det(1221211211222211
21 N
mnmnmnmnTT
−−+=+ (2.8)
)det(211121
N
bnbnK R
−= (2.9)
)det(211121
3 N
bmbmTK R
−= (2.10)
(2.11) Dimana elemen mij, nij dan bi ( i = 1,2 dan j = 1,2) didapatkan dari matriks berikut:
M =
−−−−
rzvG
rGv
NINmx
YmxYm
&&
&&
(2.12)
N(uo)=
−−−
rG
r
NumxN
YmuY
0
0
υ
υ (2.13)
Parameter dalam penentuan gain kendali yang diturunkan Nomoto berdasarkan linierisasi dari model Davidson dan Schiff (1946), dimana bentuk persamaan gain kendali Nomoto adalah :
)det(111221
Nbnbn
K−
= (2.14)
dengan
det (N) = ( ) ( )rvGrv YmuNumxNY −−− 0 (2.15)
dt(M)= ( )( ) ( )( )rGvGrzv YmxNmxNIYm&&&&
−−−−−(2.16)
n11= vY− , n21= vN
(2.17)
( ) ( )M
NYmxYNIb rGrz
det1δδ &&
−−−= (2.18)
( ) ( )M
YNmxNYmb vGv
det2δδ &&
−−−= (2.19)
Pada matriks M dan N diatas mengandung parameter
hidrodinamika kapal, dimana m = massa kapal, vY&=
turunan gaya arah sway terhadap v& , rY&= turunan
gaya yaw terhadapr& , rN&= turunan momen yaw
terhadap r& , vY = turunan gaya arah sway terhadap v,
rY = turunan gaya arah yaw terhadap r, vN = turunan
momen sway terhadap v, vN&= turunan momen sway
terhadapv& , rN = turunan momen yaw terhadap r,
Gx = pusat massa. Pada pendekatan teori slender
body strip turunan koefirien hidrodinamika dapat dinyatakan sebagai fungsi dari rasio panjang terhadap lebar dari kapal, dengan dikalikan sebuah konstanta tertentu. Smitt (1970), Norrbin (1971) dan Inoue (1981) mengembangkan suatu rumusan secara empiris dari beberapa persamaan turunan koefisien hidrodinamika yang dikemukakan oleh Clarke (1982). Untuk memperoleh besaran gaya dikalikan dengan ½ ρU2L2 dan momen dikalikan dengan ½ ρU2L3. Dimana ρ = rapat massa air laut (1014 kg/m3), L = panjang kapal, U = kecepatan servis kapal, B = lebar kapal, T = kedalaman kapal, CB = koefisien blok.[1] 2.3 Model Dinamika Gangguan Lingkungan
Di Kepulauan Riau gangguan yang paling berpengaruh terhadap maneuver kapal adalah gelombang yang dibangkitkan oleh angin. Model pendekatan gelombang linier yang biasa dilakukan oleh perancang sistem kendali pada kapal, mempunyai bentuk yang lebih sederhana dan mudah diaplikasikan. Model gelombang dapat dijelaskan sebagai berikut : y(s) = h(s)w(s) (2.20) dengan w(s) zero-mean Gaussian white noise process. Untuk menyesuaikan dengan fungsi yang diinginkan, maka digunakan fungsi alih orde dua dari gelombang, seperti pada persamaan 2.20. Aplikasi pertama kali dilakukan oleh Balchen dkk (1976), dan kemudian Saelid dkk (1983) mengusulkan model yang lebih mendekati bentuk spektrum PM, dimana model ini dinyatakan sebagai
(2.21)
Dengan gain konstanta dari fungsi alih persamaan (2.21) adalah :
ωω σξω02=K (2.22)
Modal frekwensi untuk spectrum Pierson-Moscowitz adalah:
200
2 2)(
ωξωω
++=
ss
sKsh
=
δ
δ
N
Yb
3
22.1167.0
11.2)(
2 ++=
ss
ssh
v
g88.00 =ω (2.23)
dimana ωσ menyatakan intensitas gelombang, ζ adalah
koefisien redaman, v adalah kecepatan angin sedangkan ω0 adalah frekuensi modal gelombang. Berdasarkan standar perairan internasional untuk perairan di
Indonesia didapatkan nilai masing-masing ωσ 2 = 10, ζ =
0.1, g = 9.8 m/s, ω0 = 1.2.[1] 2.5 Model Dinamika Rudder
Sebuah aktuator yang bekerja berdasarkan perintah dari sinyal kendali, dan aksi dari aktuator akan menyebabkan terjadinya gerak sesuai dengan perintah yang diinginkan. Dalam uraian tentang gerakan manuvering kapal di atas, bahwa aktuator yang selama ini digunakan dan terpasang adalah rudder, yang mempunyai kemampuan dalam menjaga arah sesuai dengan perintah. Salah satu yang banyak terpasang dikapal adalah tipe Van Amorengen, yang mempunyai spesifikasi kemampuan kerja antara -350 sampai dengan 350, dan laju kerja rudder 21/3 – 70/detik.[1] 2.6 Kendali Logika Fuzzy (KLF) pada Kendali
Tracking Kapal Faktor-faktor yang harus diperhatikan dalam
merancang kendali logika fuzzy adalah sebagai masukan/keluaran dan semesta pembicaraan, seperti rentang nilai yang diambil, faktor skala dari variabel masukan keluaran, fungsi keanggotaan yang akan di gunakan untuk menentukan nilai fuzzy dari variabel masukan\keluaran, aturan fuzzy yang akan digunakan. • Fuzzifikasi
Proses mengubah himpunan crisp (bukan fuzzy) menjadi himpunan fuzzy.
• Basis Pengetahuan Berisi basis data dan basis aturan yang mendefinisikan himpunan fuzzy atas daerah-daerah masukan dan keluaran yang disusun dalam perangkat aturan kendali.
• Fuzzy Inference System Ada beberapa cara dimana nilai masukan hasil observasi dapat digunakan untuk mengidentifikasi aturan mana yang seharusnya digunakan untuk mendapatkan aksi kendali fuzzy yang tepat yaitu mekanisme inferensi fuzzy MAX – MIN.
• Defuzzifikasi Defuzzifikasi adalah langkah terakhir dalam suatu sistem kendali logika fuzzy dimana tujuannya adalah mengkonversi setiap hasil dari inference engine yang diekpresikan dalam bentuk fuzzy set ke satu bilangan real.[2]
2.7 Perhitungan Heading Kapal Sistem autopilot dapat dinyatakan dalam dua sistem pengendali automatik yaitu course keeping dan track keeping (Fossen, 1994). Kedua pengendali tersebut sangat berperan pada saat mnghindari adanya tumbukan dengan kapal atau benda lain. Kendali autopilot klasik meliputi pengendalian pada course angel φ. Untuk perhitungan sudut heading antara dua titik yaitu didekati dengan rumus
(2.24)
Persamaan diatas memerlukan sign test untuk memastikan bahwa φd proper quadrant. Sudut heading hanya dapat diubah pada tiap-tiap point. Oleh karena itu overshoot harus diamati ketika terjadi perubahan titik point. Pada rancangan penelitian ini, penentuan lintasan dilakukan dengan mengkonversi satuan derajat menjadi jarak. Pada studi kasus Kepulauan Riau digunakan koordinat geografis, dimanasumbu yang digunakan adalah garis bujur (BB dan BT), yang berpotongan dengan garis lintang (LU dan LS) atau koordinat yang penyebutannya menggunakan garis lintang dan bujur. Koordinatnya menggunakan derajat, menit dan detik. Sedangkan untuk konversi derajat ke jarak dapat dinyatakan sebagai berikut: 1o = 111,322 km = 111.322 m 1o = 60 menit 1o = 3600 detik [3] 3. METODOLOGI PENELITIAN
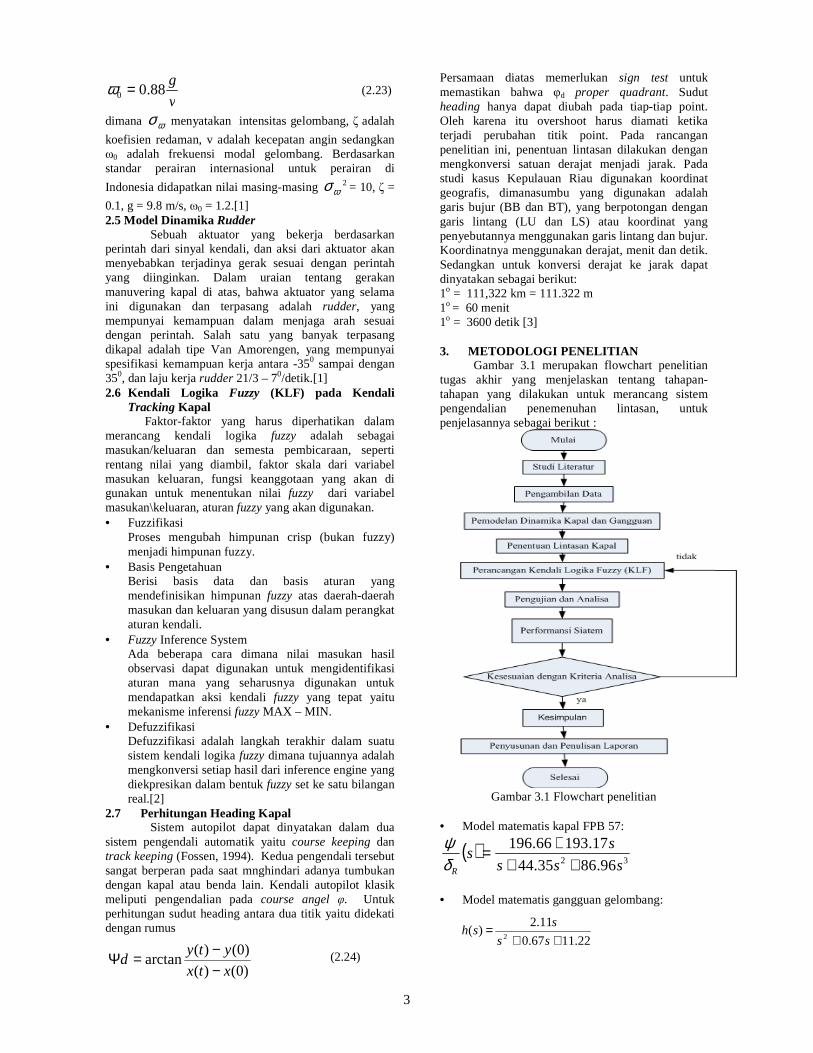
Gambar 3.1 merupakan flowchart penelitian tugas akhir yang menjelaskan tentang tahapan-tahapan yang dilakukan untuk merancang sistem pengendalian penemenuhan lintasan, untuk penjelasannya sebagai berikut :
Gambar 3.1 Flowchart penelitian
• Model matematis kapal FPB 57:
( )32 96.8635.44
17.19366.196
sss
ss
R +++=
δψ
• Model matematis gangguan gelombang:
)0()(
)0()(arctan
xtx
ytyd
−−=Ψ
4
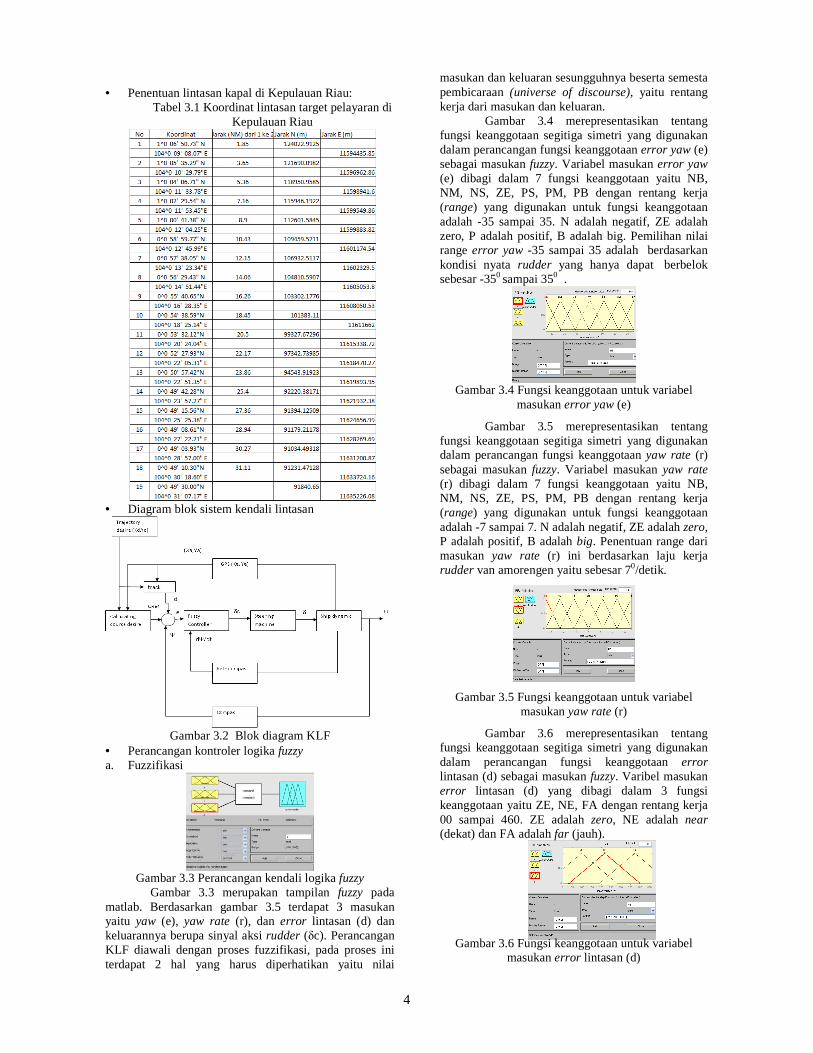
• Penentuan lintasan kapal di Kepulauan Riau:
Tabel 3.1 Koordinat lintasan target pelayaran di Kepulauan Riau
• Diagram blok sistem kendali lintasan
Gambar 3.2 Blok diagram KLF
• Perancangan kontroler logika fuzzy a. Fuzzifikasi
Gambar 3.3 Perancangan kendali logika fuzzy
Gambar 3.3 merupakan tampilan fuzzy pada matlab. Berdasarkan gambar 3.5 terdapat 3 masukan yaitu yaw (e), yaw rate (r), dan error lintasan (d) dan keluarannya berupa sinyal aksi rudder (δc). Perancangan KLF diawali dengan proses fuzzifikasi, pada proses ini terdapat 2 hal yang harus diperhatikan yaitu nilai
masukan dan keluaran sesungguhnya beserta semesta pembicaraan (universe of discourse), yaitu rentang kerja dari masukan dan keluaran.
Gambar 3.4 merepresentasikan tentang fungsi keanggotaan segitiga simetri yang digunakan dalam perancangan fungsi keanggotaan error yaw (e) sebagai masukan fuzzy. Variabel masukan error yaw (e) dibagi dalam 7 fungsi keanggotaan yaitu NB, NM, NS, ZE, PS, PM, PB dengan rentang kerja (range) yang digunakan untuk fungsi keanggotaan adalah -35 sampai 35. N adalah negatif, ZE adalah zero, P adalah positif, B adalah big. Pemilihan nilai range error yaw -35 sampai 35 adalah berdasarkan kondisi nyata rudder yang hanya dapat berbelok sebesar -350 sampai 350 .
Gambar 3.4 Fungsi keanggotaan untuk variabel
masukan error yaw (e)
Gambar 3.5 merepresentasikan tentang fungsi keanggotaan segitiga simetri yang digunakan dalam perancangan fungsi keanggotaan yaw rate (r) sebagai masukan fuzzy. Variabel masukan yaw rate (r) dibagi dalam 7 fungsi keanggotaan yaitu NB, NM, NS, ZE, PS, PM, PB dengan rentang kerja (range) yang digunakan untuk fungsi keanggotaan adalah -7 sampai 7. N adalah negatif, ZE adalah zero, P adalah positif, B adalah big. Penentuan range dari masukan yaw rate (r) ini berdasarkan laju kerja rudder van amorengen yaitu sebesar 70/detik.
Gambar 3.5 Fungsi keanggotaan untuk variabel masukan yaw rate (r)
Gambar 3.6 merepresentasikan tentang fungsi keanggotaan segitiga simetri yang digunakan dalam perancangan fungsi keanggotaan error lintasan (d) sebagai masukan fuzzy. Varibel masukan error lintasan (d) yang dibagi dalam 3 fungsi keanggotaan yaitu ZE, NE, FA dengan rentang kerja 00 sampai 460. ZE adalah zero, NE adalah near (dekat) dan FA adalah far (jauh).
Gambar 3.6 Fungsi keanggotaan untuk variabel masukan error lintasan (d)
5
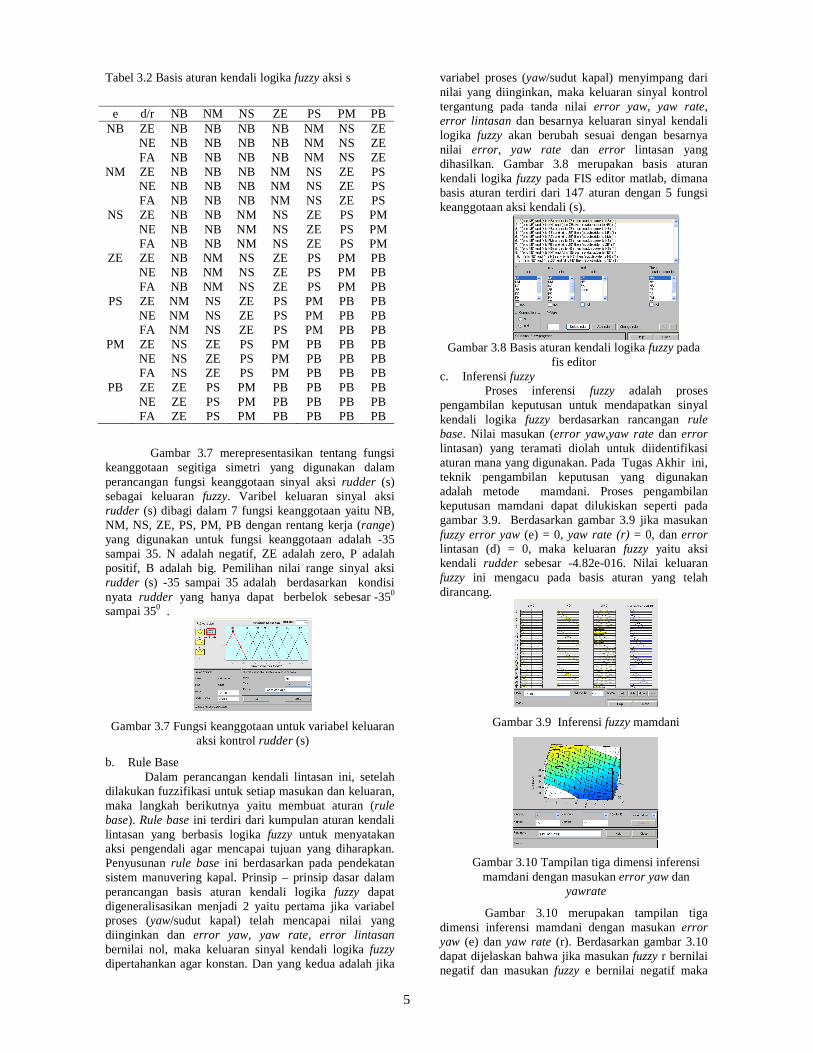
Tabel 3.2 Basis aturan kendali logika fuzzy aksi s
Gambar 3.7 merepresentasikan tentang fungsi keanggotaan segitiga simetri yang digunakan dalam perancangan fungsi keanggotaan sinyal aksi rudder (s) sebagai keluaran fuzzy. Varibel keluaran sinyal aksi rudder (s) dibagi dalam 7 fungsi keanggotaan yaitu NB, NM, NS, ZE, PS, PM, PB dengan rentang kerja (range) yang digunakan untuk fungsi keanggotaan adalah -35 sampai 35. N adalah negatif, ZE adalah zero, P adalah positif, B adalah big. Pemilihan nilai range sinyal aksi rudder (s) -35 sampai 35 adalah berdasarkan kondisi nyata rudder yang hanya dapat berbelok sebesar -350
sampai 350 .
Gambar 3.7 Fungsi keanggotaan untuk variabel keluaran aksi kontrol rudder (s)
b. Rule Base Dalam perancangan kendali lintasan ini, setelah
dilakukan fuzzifikasi untuk setiap masukan dan keluaran, maka langkah berikutnya yaitu membuat aturan (rule base). Rule base ini terdiri dari kumpulan aturan kendali lintasan yang berbasis logika fuzzy untuk menyatakan aksi pengendali agar mencapai tujuan yang diharapkan. Penyusunan rule base ini berdasarkan pada pendekatan sistem manuvering kapal. Prinsip – prinsip dasar dalam perancangan basis aturan kendali logika fuzzy dapat digeneralisasikan menjadi 2 yaitu pertama jika variabel proses (yaw/sudut kapal) telah mencapai nilai yang diinginkan dan error yaw, yaw rate, error lintasan bernilai nol, maka keluaran sinyal kendali logika fuzzy dipertahankan agar konstan. Dan yang kedua adalah jika
variabel proses (yaw/sudut kapal) menyimpang dari nilai yang diinginkan, maka keluaran sinyal kontrol tergantung pada tanda nilai error yaw, yaw rate, error lintasan dan besarnya keluaran sinyal kendali logika fuzzy akan berubah sesuai dengan besarnya nilai error, yaw rate dan error lintasan yang dihasilkan. Gambar 3.8 merupakan basis aturan kendali logika fuzzy pada FIS editor matlab, dimana basis aturan terdiri dari 147 aturan dengan 5 fungsi keanggotaan aksi kendali (s).
Gambar 3.8 Basis aturan kendali logika fuzzy pada
fis editor c. Inferensi fuzzy
Proses inferensi fuzzy adalah proses pengambilan keputusan untuk mendapatkan sinyal kendali logika fuzzy berdasarkan rancangan rule base. Nilai masukan (error yaw,yaw rate dan error lintasan) yang teramati diolah untuk diidentifikasi aturan mana yang digunakan. Pada Tugas Akhir ini, teknik pengambilan keputusan yang digunakan adalah metode mamdani. Proses pengambilan keputusan mamdani dapat dilukiskan seperti pada gambar 3.9. Berdasarkan gambar 3.9 jika masukan fuzzy error yaw (e) = 0, yaw rate (r) = 0, dan error lintasan (d) = 0, maka keluaran fuzzy yaitu aksi kendali rudder sebesar -4.82e-016. Nilai keluaran fuzzy ini mengacu pada basis aturan yang telah dirancang.
Gambar 3.9 Inferensi fuzzy mamdani
Gambar 3.10 Tampilan tiga dimensi inferensi mamdani dengan masukan error yaw dan
yawrate
Gambar 3.10 merupakan tampilan tiga dimensi inferensi mamdani dengan masukan error yaw (e) dan yaw rate (r). Berdasarkan gambar 3.10 dapat dijelaskan bahwa jika masukan fuzzy r bernilai negatif dan masukan fuzzy e bernilai negatif maka
e d/r NB NM NS ZE PS PM PB NB ZE NB NB NB NB NM NS ZE
NE NB NB NB NB NM NS ZE FA NB NB NB NB NM NS ZE
NM ZE NB NB NB NM NS ZE PS NE NB NB NB NM NS ZE PS FA NB NB NB NM NS ZE PS
NS ZE NB NB NM NS ZE PS PM NE NB NB NM NS ZE PS PM FA NB NB NM NS ZE PS PM
ZE ZE NB NM NS ZE PS PM PB NE NB NM NS ZE PS PM PB FA NB NM NS ZE PS PM PB
PS ZE NM NS ZE PS PM PB PB NE NM NS ZE PS PM PB PB FA NM NS ZE PS PM PB PB
PM ZE NS ZE PS PM PB PB PB NE NS ZE PS PM PB PB PB FA NS ZE PS PM PB PB PB
PB ZE ZE PS PM PB PB PB PB NE ZE PS PM PB PB PB PB FA ZE PS PM PB PB PB PB
6
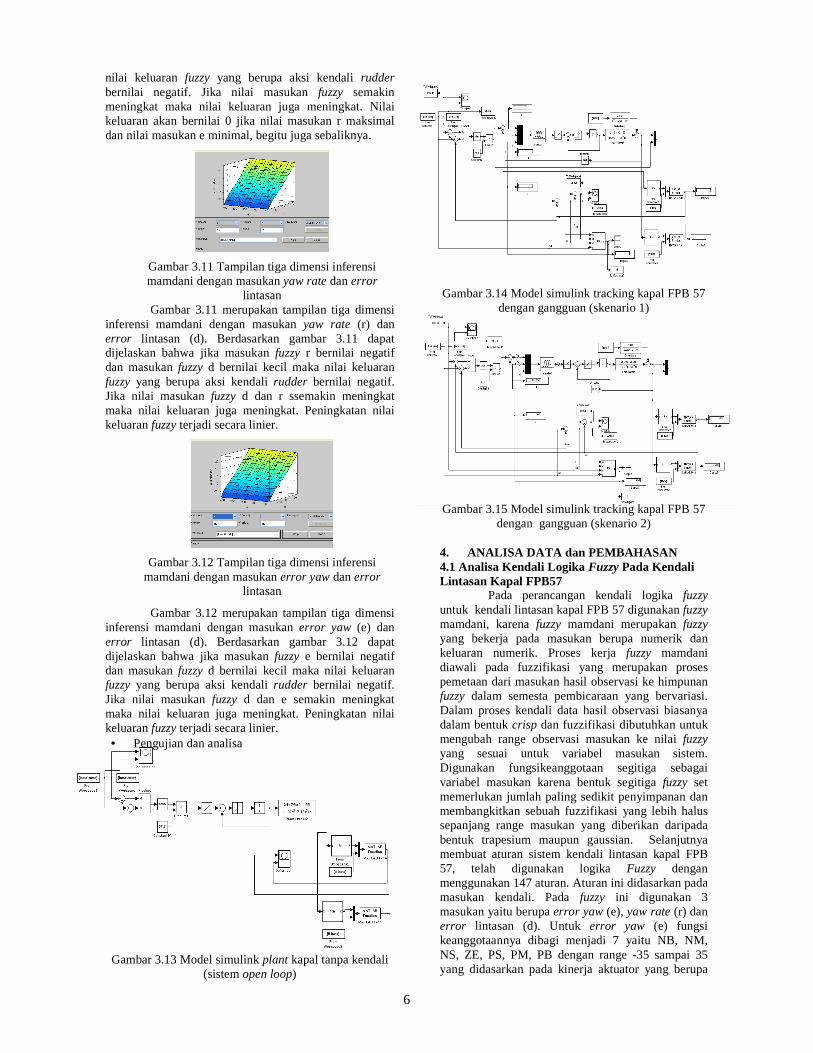
nilai keluaran fuzzy yang berupa aksi kendali rudder bernilai negatif. Jika nilai masukan fuzzy semakin meningkat maka nilai keluaran juga meningkat. Nilai keluaran akan bernilai 0 jika nilai masukan r maksimal dan nilai masukan e minimal, begitu juga sebaliknya.
Gambar 3.11 Tampilan tiga dimensi inferensi mamdani dengan masukan yaw rate dan error
lintasan Gambar 3.11 merupakan tampilan tiga dimensi
inferensi mamdani dengan masukan yaw rate (r) dan error lintasan (d). Berdasarkan gambar 3.11 dapat dijelaskan bahwa jika masukan fuzzy r bernilai negatif dan masukan fuzzy d bernilai kecil maka nilai keluaran fuzzy yang berupa aksi kendali rudder bernilai negatif. Jika nilai masukan fuzzy d dan r ssemakin meningkat maka nilai keluaran juga meningkat. Peningkatan nilai keluaran fuzzy terjadi secara linier.
Gambar 3.12 Tampilan tiga dimensi inferensi mamdani dengan masukan error yaw dan error
lintasan
Gambar 3.12 merupakan tampilan tiga dimensi inferensi mamdani dengan masukan error yaw (e) dan error lintasan (d). Berdasarkan gambar 3.12 dapat dijelaskan bahwa jika masukan fuzzy e bernilai negatif dan masukan fuzzy d bernilai kecil maka nilai keluaran fuzzy yang berupa aksi kendali rudder bernilai negatif. Jika nilai masukan fuzzy d dan e semakin meningkat maka nilai keluaran juga meningkat. Peningkatan nilai keluaran fuzzy terjadi secara linier. • Pengujian dan analisa
Gambar 3.13 Model simulink plant kapal tanpa kendali
(sistem open loop)
Gambar 3.14 Model simulink tracking kapal FPB 57 dengan gangguan (skenario 1)
Gambar 3.15 Model simulink tracking kapal FPB 57 dengan gangguan (skenario 2)
4. ANALISA DATA dan PEMBAHASAN 4.1 Analisa Kendali Logika Fuzzy Pada Kendali Lintasan Kapal FPB57 Pada perancangan kendali logika fuzzy untuk kendali lintasan kapal FPB 57 digunakan fuzzy mamdani, karena fuzzy mamdani merupakan fuzzy yang bekerja pada masukan berupa numerik dan keluaran numerik. Proses kerja fuzzy mamdani diawali pada fuzzifikasi yang merupakan proses pemetaan dari masukan hasil observasi ke himpunan fuzzy dalam semesta pembicaraan yang bervariasi. Dalam proses kendali data hasil observasi biasanya dalam bentuk crisp dan fuzzifikasi dibutuhkan untuk mengubah range observasi masukan ke nilai fuzzy yang sesuai untuk variabel masukan sistem. Digunakan fungsikeanggotaan segitiga sebagai variabel masukan karena bentuk segitiga fuzzy set memerlukan jumlah paling sedikit penyimpanan dan membangkitkan sebuah fuzzifikasi yang lebih halus sepanjang range masukan yang diberikan daripada bentuk trapesium maupun gaussian. Selanjutnya membuat aturan sistem kendali lintasan kapal FPB 57, telah digunakan logika Fuzzy dengan menggunakan 147 aturan. Aturan ini didasarkan pada masukan kendali. Pada fuzzy ini digunakan 3 masukan yaitu berupa error yaw (e), yaw rate (r) dan error lintasan (d). Untuk error yaw (e) fungsi keanggotaannya dibagi menjadi 7 yaitu NB, NM, NS, ZE, PS, PM, PB dengan range -35 sampai 35 yang didasarkan pada kinerja aktuator yang berupa
7
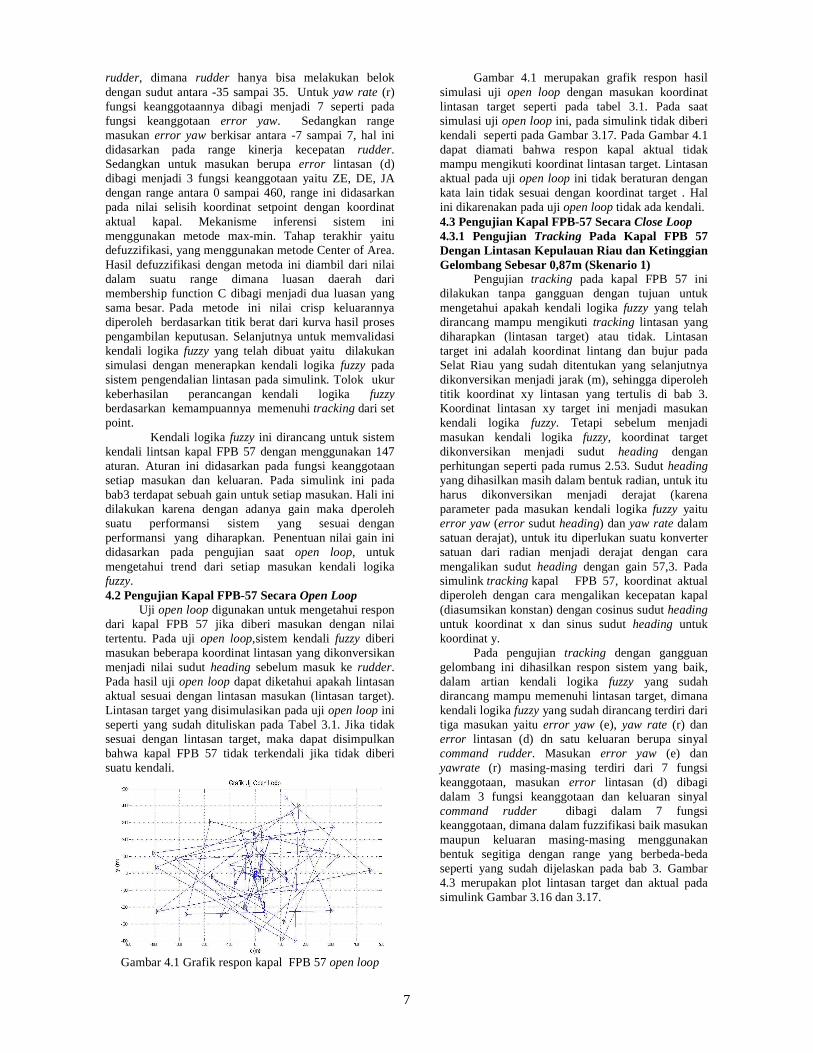
rudder, dimana rudder hanya bisa melakukan belok dengan sudut antara -35 sampai 35. Untuk yaw rate (r) fungsi keanggotaannya dibagi menjadi 7 seperti pada fungsi keanggotaan error yaw. Sedangkan range masukan error yaw berkisar antara -7 sampai 7, hal ini didasarkan pada range kinerja kecepatan rudder. Sedangkan untuk masukan berupa error lintasan (d) dibagi menjadi 3 fungsi keanggotaan yaitu ZE, DE, JA dengan range antara 0 sampai 460, range ini didasarkan pada nilai selisih koordinat setpoint dengan koordinat aktual kapal. Mekanisme inferensi sistem ini menggunakan metode max-min. Tahap terakhir yaitu defuzzifikasi, yang menggunakan metode Center of Area. Hasil defuzzifikasi dengan metoda ini diambil dari nilai dalam suatu range dimana luasan daerah dari membership function C dibagi menjadi dua luasan yang sama besar. Pada metode ini nilai crisp keluarannya diperoleh berdasarkan titik berat dari kurva hasil proses pengambilan keputusan. Selanjutnya untuk memvalidasi kendali logika fuzzy yang telah dibuat yaitu dilakukan simulasi dengan menerapkan kendali logika fuzzy pada sistem pengendalian lintasan pada simulink. Tolok ukur keberhasilan perancangan kendali logika fuzzy berdasarkan kemampuannya memenuhi tracking dari set point. Kendali logika fuzzy ini dirancang untuk sistem kendali lintsan kapal FPB 57 dengan menggunakan 147 aturan. Aturan ini didasarkan pada fungsi keanggotaan setiap masukan dan keluaran. Pada simulink ini pada bab3 terdapat sebuah gain untuk setiap masukan. Hali ini dilakukan karena dengan adanya gain maka dperoleh suatu performansi sistem yang sesuai dengan performansi yang diharapkan. Penentuan nilai gain ini didasarkan pada pengujian saat open loop, untuk mengetahui trend dari setiap masukan kendali logika fuzzy. 4.2 Pengujian Kapal FPB-57 Secara Open Loop Uji open loop digunakan untuk mengetahui respon dari kapal FPB 57 jika diberi masukan dengan nilai tertentu. Pada uji open loop,sistem kendali fuzzy diberi masukan beberapa koordinat lintasan yang dikonversikan menjadi nilai sudut heading sebelum masuk ke rudder. Pada hasil uji open loop dapat diketahui apakah lintasan aktual sesuai dengan lintasan masukan (lintasan target). Lintasan target yang disimulasikan pada uji open loop ini seperti yang sudah dituliskan pada Tabel 3.1. Jika tidak sesuai dengan lintasan target, maka dapat disimpulkan bahwa kapal FPB 57 tidak terkendali jika tidak diberi suatu kendali.
Gambar 4.1 Grafik respon kapal FPB 57 open loop
Gambar 4.1 merupakan grafik respon hasil simulasi uji open loop dengan masukan koordinat lintasan target seperti pada tabel 3.1. Pada saat simulasi uji open loop ini, pada simulink tidak diberi kendali seperti pada Gambar 3.17. Pada Gambar 4.1 dapat diamati bahwa respon kapal aktual tidak mampu mengikuti koordinat lintasan target. Lintasan aktual pada uji open loop ini tidak beraturan dengan kata lain tidak sesuai dengan koordinat target . Hal ini dikarenakan pada uji open loop tidak ada kendali. 4.3 Pengujian Kapal FPB-57 Secara Close Loop 4.3.1 Pengujian Tracking Pada Kapal FPB 57 Dengan Lintasan Kepulauan Riau dan Ketinggian Gelombang Sebesar 0,87m (Skenario 1) Pengujian tracking pada kapal FPB 57 ini dilakukan tanpa gangguan dengan tujuan untuk mengetahui apakah kendali logika fuzzy yang telah dirancang mampu mengikuti tracking lintasan yang diharapkan (lintasan target) atau tidak. Lintasan target ini adalah koordinat lintang dan bujur pada Selat Riau yang sudah ditentukan yang selanjutnya dikonversikan menjadi jarak (m), sehingga diperoleh titik koordinat xy lintasan yang tertulis di bab 3. Koordinat lintasan xy target ini menjadi masukan kendali logika fuzzy. Tetapi sebelum menjadi masukan kendali logika fuzzy, koordinat target dikonversikan menjadi sudut heading dengan perhitungan seperti pada rumus 2.53. Sudut heading yang dihasilkan masih dalam bentuk radian, untuk itu harus dikonversikan menjadi derajat (karena parameter pada masukan kendali logika fuzzy yaitu error yaw (error sudut heading) dan yaw rate dalam satuan derajat), untuk itu diperlukan suatu konverter satuan dari radian menjadi derajat dengan cara mengalikan sudut heading dengan gain 57,3. Pada simulink tracking kapal FPB 57, koordinat aktual diperoleh dengan cara mengalikan kecepatan kapal (diasumsikan konstan) dengan cosinus sudut heading untuk koordinat x dan sinus sudut heading untuk koordinat y. Pada pengujian tracking dengan gangguan gelombang ini dihasilkan respon sistem yang baik, dalam artian kendali logika fuzzy yang sudah dirancang mampu memenuhi lintasan target, dimana kendali logika fuzzy yang sudah dirancang terdiri dari tiga masukan yaitu error yaw (e), yaw rate (r) dan error lintasan (d) dn satu keluaran berupa sinyal command rudder. Masukan error yaw (e) dan yawrate (r) masing-masing terdiri dari 7 fungsi keanggotaan, masukan error lintasan (d) dibagi dalam 3 fungsi keanggotaan dan keluaran sinyal command rudder dibagi dalam 7 fungsi keanggotaan, dimana dalam fuzzifikasi baik masukan maupun keluaran masing-masing menggunakan bentuk segitiga dengan range yang berbeda-beda seperti yang sudah dijelaskan pada bab 3. Gambar 4.3 merupakan plot lintasan target dan aktual pada simulink Gambar 3.16 dan 3.17.
8
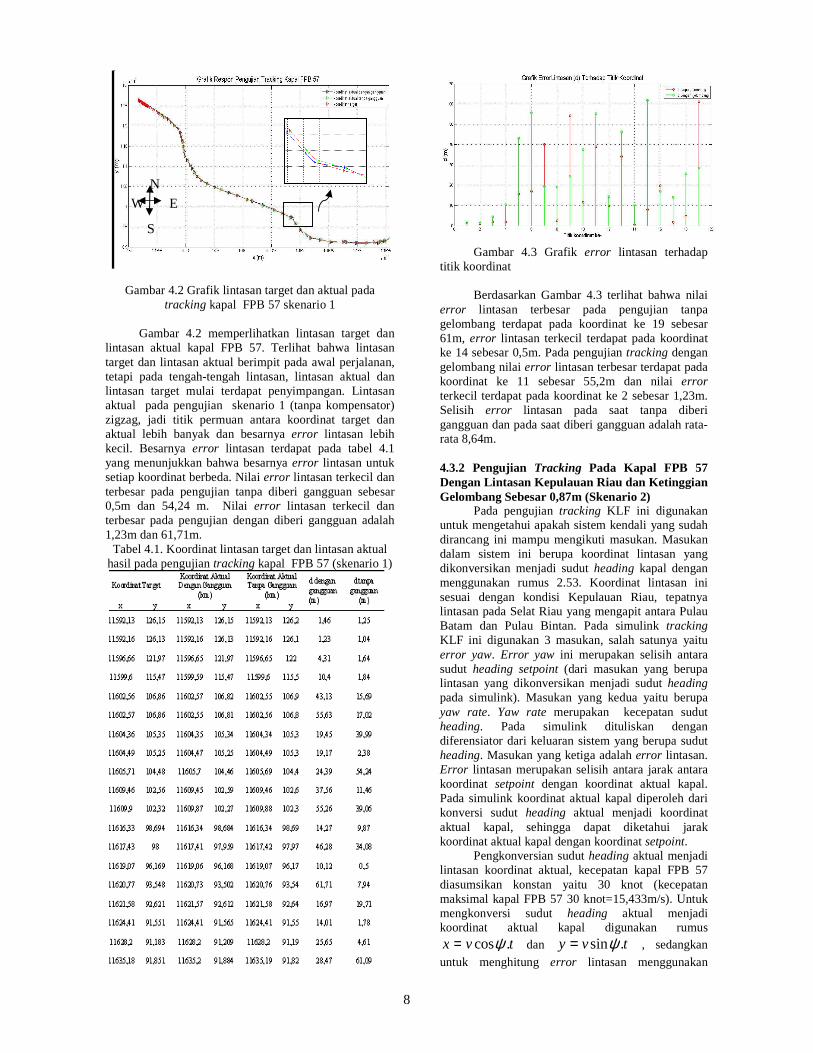
Gambar 4.2 Grafik lintasan target dan aktual pada tracking kapal FPB 57 skenario 1
Gambar 4.2 memperlihatkan lintasan target dan lintasan aktual kapal FPB 57. Terlihat bahwa lintasan target dan lintasan aktual berimpit pada awal perjalanan, tetapi pada tengah-tengah lintasan, lintasan aktual dan lintasan target mulai terdapat penyimpangan. Lintasan aktual pada pengujian skenario 1 (tanpa kompensator) zigzag, jadi titik permuan antara koordinat target dan aktual lebih banyak dan besarnya error lintasan lebih kecil. Besarnya error lintasan terdapat pada tabel 4.1 yang menunjukkan bahwa besarnya error lintasan untuk setiap koordinat berbeda. Nilai error lintasan terkecil dan terbesar pada pengujian tanpa diberi gangguan sebesar 0,5m dan 54,24 m. Nilai error lintasan terkecil dan terbesar pada pengujian dengan diberi gangguan adalah 1,23m dan 61,71m.
Tabel 4.1. Koordinat lintasan target dan lintasan aktual hasil pada pengujian tracking kapal FPB 57 (skenario 1)
Gambar 4.3 Grafik error lintasan terhadap titik koordinat Berdasarkan Gambar 4.3 terlihat bahwa nilai error lintasan terbesar pada pengujian tanpa gelombang terdapat pada koordinat ke 19 sebesar 61m, error lintasan terkecil terdapat pada koordinat ke 14 sebesar 0,5m. Pada pengujian tracking dengan gelombang nilai error lintasan terbesar terdapat pada koordinat ke 11 sebesar 55,2m dan nilai error terkecil terdapat pada koordinat ke 2 sebesar 1,23m. Selisih error lintasan pada saat tanpa diberi gangguan dan pada saat diberi gangguan adalah rata-rata 8,64m. 4.3.2 Pengujian Tracking Pada Kapal FPB 57 Dengan Lintasan Kepulauan Riau dan Ketinggian Gelombang Sebesar 0,87m (Skenario 2) Pada pengujian tracking KLF ini digunakan untuk mengetahui apakah sistem kendali yang sudah dirancang ini mampu mengikuti masukan. Masukan dalam sistem ini berupa koordinat lintasan yang dikonversikan menjadi sudut heading kapal dengan menggunakan rumus 2.53. Koordinat lintasan ini sesuai dengan kondisi Kepulauan Riau, tepatnya lintasan pada Selat Riau yang mengapit antara Pulau Batam dan Pulau Bintan. Pada simulink tracking KLF ini digunakan 3 masukan, salah satunya yaitu error yaw. Error yaw ini merupakan selisih antara sudut heading setpoint (dari masukan yang berupa lintasan yang dikonversikan menjadi sudut heading pada simulink). Masukan yang kedua yaitu berupa yaw rate. Yaw rate merupakan kecepatan sudut heading. Pada simulink dituliskan dengan diferensiator dari keluaran sistem yang berupa sudut heading. Masukan yang ketiga adalah error lintasan. Error lintasan merupakan selisih antara jarak antara koordinat setpoint dengan koordinat aktual kapal. Pada simulink koordinat aktual kapal diperoleh dari konversi sudut heading aktual menjadi koordinat aktual kapal, sehingga dapat diketahui jarak koordinat aktual kapal dengan koordinat setpoint. Pengkonversian sudut heading aktual menjadi lintasan koordinat aktual, kecepatan kapal FPB 57 diasumsikan konstan yaitu 30 knot (kecepatan maksimal kapal FPB 57 30 knot=15,433m/s). Untuk mengkonversi sudut heading aktual menjadi koordinat aktual kapal digunakan rumus
tvx .cosψ= dan tvy .sinψ= , sedangkan
untuk menghitung error lintasan menggunakan
N
W E
S

9
North (N)
rumus 22 )()( ydyaxdxad −+−= . Untuk
keluaran dari sistem pengendalian lintasan ini adalah berupa sudut heading untuk sumbu y pada scope dalam satuan radian sedangkan untuk keluaran pada sumbu x adalah waktu dalam satuan sekon. Pada simulink tersebut juga akan ditampilkan grafik lintasan yang diinginkan dan lintasan aktual setelah dikendalikan dengan gangguan berupa gelombang. Gambar 4.5 merupakan plot koordinat lintasan target dan lintasan aktual terhadap x dan y. Lintasan ini pada dasarnya berupa koordinat lintang dan bujur dalam satuan derajat, menit dan sekon. Selanjutnya dikonversikan menjadi jarak dalam satuan meter. Pengkonversian ini menggunakan rumus konversi dalam subbab 2.7.2. Keluaran dari sistem kendali ini berupa sudut heading yang dikonversikan ke koordinat lintasan xy dengan menggunakan rumus 2.27 dan 2.28. Untuk nilai koordinat x dan koordinat y digunakan rumus yang berbeda tetapi dalam hal ini kecepatan kapal dianggap konstan yaitu 15,433m/s.
Gambar 4.4 Grafik lintasan target dan aktual pada
tracking kapal FPB 57 skenario 2 Gambar 4.4 memperlihatkan lintasan target dan lintasan aktual kapal FPB 57. Terlihat bahwa lintasan target dan lintasan aktual berimpit pada awal perjalanan, tetapi pada tengah-tengah lintasan, lintasan aktual dan lintasan target mulai terdapat penyimpangan. Lintasan aktual baik tanpa gangguan maupun dengan gangguan mampu mengikuti tracking lintasan target, teapi nilai error lintasan besar. Besarnya error lintasan terdapat pada Tabel 4.2 yang menunjukkan bahwa besarnya error lintasan untuk setiap koordinat berbeda.
Tabel 4.2. Koordinat lintasan target dan lintasan aktual hasil pada pengujian tracking kapal FPB 57 (skenario 2)
Berdasarkan Tabel 4.2 tentang error lintasan pada pengujian dengan menggunakan skenario 2, dapat disimpulkan bahwa nilai error lintasan pada saat tanpa diberi gangguan lebih kecil dari pada saat diberi gangguan. Nilai error lintasan terkecil dan terbesar pada pengujian tanpa diberi gangguan sebesar 0,1m dan 68 m. Nilai error lintasan terkecil dan terbesar pada pengujian dengan diberi gangguan adalah 0,1m dan 110m.
Gambar 4.5 Grafik error lintasan terhadap titik
koordinat
Berdasarkan Gambar 4.5 tentang grafik error lintasan terhadap koordinat, dapat disimpulkan bahwa perbedaan nilai error lintasan pada saat diberi gangguan dan tidak diberi gangguan nilainya tidak terlalu berbeda jauh, nilainya hanya berbeda rata-rata 2,45m. Pada hasil pengujian tracking dengan menggunakan skenario 1 dan skenario 2 terdapat perbedaaan, yaitu terdapat pada lintasan aktual. Pada saat pengujian tracking dengan menggunakan skenario 1, lintasan aktual baik tanpa diberi gangguan maupun dengan diberi gangguan memiliki rata-rata nilai error lintasan 17,76m dan 25,12m. Sedangkan pada pengujian tracking dengan menggunakan skenario 2 , rata-rata error lintasan tanpa diberi gangguan dan dengan diberi gangguan adalah masing-masing sebesar 47,01m dan 49,47m. 4.3.3 Pengujian Tracking Pada Kapal FPB 57 Dengan Lintasan Kepulauan Riau dan Ketinggian Gelombang Sebesar 2 m (Skenario 1)
Gambar 4.6 Grafik lintasan target dan aktual pada
tracking kapal FPB 57 skenario 1dengan ketinggian gelombang 2m
N
W E
S
N
W E
S
10
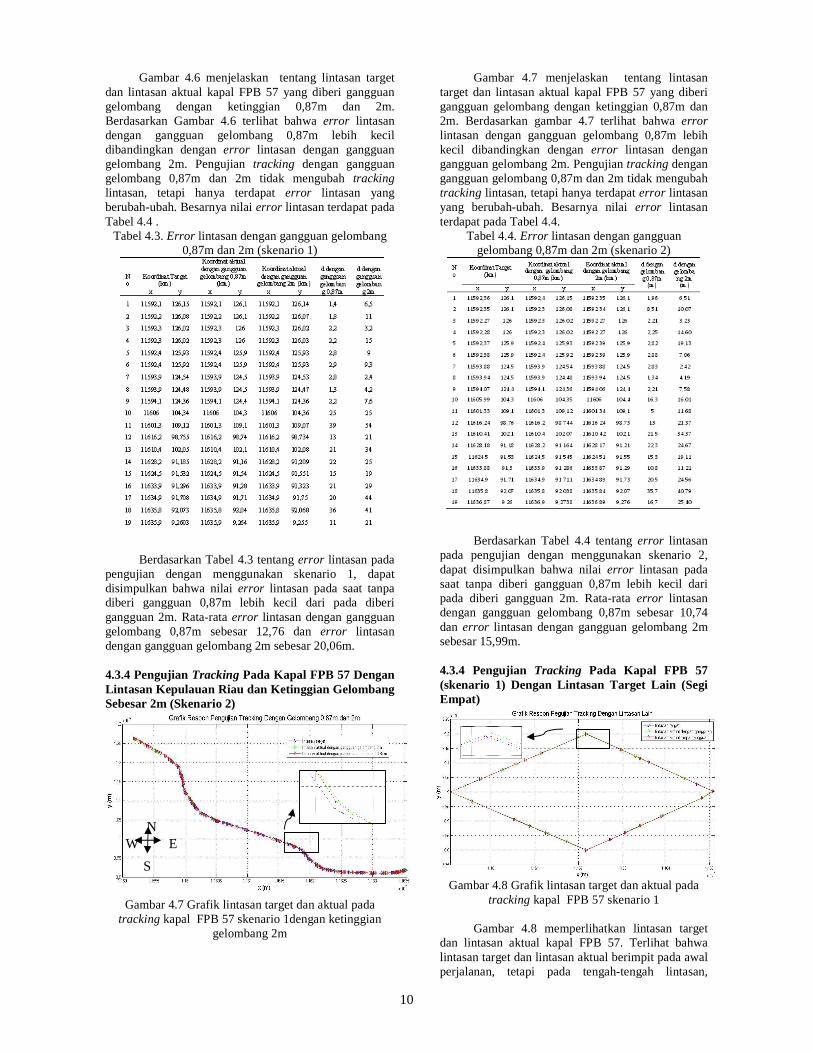
Gambar 4.6 menjelaskan tentang lintasan target dan lintasan aktual kapal FPB 57 yang diberi gangguan gelombang dengan ketinggian 0,87m dan 2m. Berdasarkan Gambar 4.6 terlihat bahwa error lintasan dengan gangguan gelombang 0,87m lebih kecil dibandingkan dengan error lintasan dengan gangguan gelombang 2m. Pengujian tracking dengan gangguan gelombang 0,87m dan 2m tidak mengubah tracking lintasan, tetapi hanya terdapat error lintasan yang berubah-ubah. Besarnya nilai error lintasan terdapat pada Tabel 4.4 .
Tabel 4.3. Error lintasan dengan gangguan gelombang 0,87m dan 2m (skenario 1)
Berdasarkan Tabel 4.3 tentang error lintasan pada pengujian dengan menggunakan skenario 1, dapat disimpulkan bahwa nilai error lintasan pada saat tanpa diberi gangguan 0,87m lebih kecil dari pada diberi gangguan 2m. Rata-rata error lintasan dengan gangguan gelombang 0,87m sebesar 12,76 dan error lintasan dengan gangguan gelombang 2m sebesar 20,06m. 4.3.4 Pengujian Tracking Pada Kapal FPB 57 Dengan Lintasan Kepulauan Riau dan Ketinggian Gelombang Sebesar 2m (Skenario 2)
Gambar 4.7 Grafik lintasan target dan aktual pada
tracking kapal FPB 57 skenario 1dengan ketinggian gelombang 2m
Gambar 4.7 menjelaskan tentang lintasan target dan lintasan aktual kapal FPB 57 yang diberi gangguan gelombang dengan ketinggian 0,87m dan 2m. Berdasarkan gambar 4.7 terlihat bahwa error lintasan dengan gangguan gelombang 0,87m lebih kecil dibandingkan dengan error lintasan dengan gangguan gelombang 2m. Pengujian tracking dengan gangguan gelombang 0,87m dan 2m tidak mengubah tracking lintasan, tetapi hanya terdapat error lintasan yang berubah-ubah. Besarnya nilai error lintasan terdapat pada Tabel 4.4.
Tabel 4.4. Error lintasan dengan gangguan gelombang 0,87m dan 2m (skenario 2)
Berdasarkan Tabel 4.4 tentang error lintasan pada pengujian dengan menggunakan skenario 2, dapat disimpulkan bahwa nilai error lintasan pada saat tanpa diberi gangguan 0,87m lebih kecil dari pada diberi gangguan 2m. Rata-rata error lintasan dengan gangguan gelombang 0,87m sebesar 10,74 dan error lintasan dengan gangguan gelombang 2m sebesar 15,99m. 4.3.4 Pengujian Tracking Pada Kapal FPB 57 (skenario 1) Dengan Lintasan Target Lain (Segi Empat)
Gambar 4.8 Grafik lintasan target dan aktual pada
tracking kapal FPB 57 skenario 1
Gambar 4.8 memperlihatkan lintasan target dan lintasan aktual kapal FPB 57. Terlihat bahwa lintasan target dan lintasan aktual berimpit pada awal perjalanan, tetapi pada tengah-tengah lintasan,
N W E
S

11
lintasan aktual dan lintasan target mulai terdapat penyimpangan. Lintasan aktual pada pengujian skenario 1 (tanpa kompensator) zigzag, jadi titik permuan antara koordinat target dan aktual lebih banyak dan besarnya error lintasan lebih kecil. Besarnya error lintasan terdapat pada Tabel 4.5 yang menunjukkan bahwa besarnya error lintasan untuk setiap koordinat berbeda. Dari Gambar 4.9 terlihat bahwa error lintasan dengan gangguan gelombang lebih besar dari pada error lintasan tanpa gelombang, untuk lebih detail tentang error lintasan dapat dilihat pada Tabel 4.5.
Tabel 4.5. Koordinat lintasan target dan lintasan aktual hasil pada pengujian tracking kapal FPB 57 (skenario 1)
4.3.5 Pengujian Tracking Pada Kapal FPB 57 (skenario 2) Dengan Lintasan Target Segi Empat
Gambar 4.9 Grafik lintasan target dan aktual pada
tracking kapal FPB 57 skenario 1 Gambar 4.9 memperlihatkan lintasan target dan lintasan aktual kapal FPB 57. Terlihat bahwa lintasan target dan lintasan aktual berimpit pada awal perjalanan, tetapi pada tengah-tengah lintasan, lintasan aktual dan lintasan target mulai terdapat penyimpangan. Lintasan aktual baik tanpa gangguan maupun dengan gangguan mampu mengikuti tracking lintasan target, tetapi nilai error lintasan besar. Besarnya error lintasan terdapat pada Tabel 4.6 yang menunjukkan bahwa besarnya error lintasan untuk setiap koordinat berbeda. Dari Gambar 4.9 terlihat bahwa error lintasan dengan gangguan gelombang lebih besar dari pada error lintasan tanpa gelombang, untuk lebih detail tentang error lintasan dapat dilihat pada Tabel 4.6.
Tabel 4.6. Koordinat lintasan target dan lintasan aktual hasil pada pengujian tracking kapal FPB 57 (skenario 2)
5.KESIMPULAN Dari hasil analisa dan pembahasan, dapat diambil kesimpulan: • Telah dirancang kendali logika fuzzy
mamdani dalam sistem pengendalian lintasan dengan masukan kendali logika fuzzy error yaw, yaw rate dan error lintasan, keluaran fuzzy aksi kendali sebagai bentuk command rudder. Basis aturan yang digunakan sebanyak 147 aturan dengan fungsi keanggotaan masukan error yaw dan yaw rate masing-masing dalam 7 fungsi keanggotaan dan error lintasan dalam 3 fungsi keanggotaan dengan bentuk fungsi keanggotaan segitiga
• Dari hasil simulasi skenario 1 (tanpa kompensator pada masukan fuzzy), pada simulasi tanpa gangguan terdapat error lintasan dengan range 0,5m - 61,09m dan rata-rata 17,12m, pada simulasi dengan gangguan terdapat error lintasan dengan range 1,23m - 61,7m dan rata-rata 25,76m.
• Dari hasil simulasi skenario 2 (dengan kompensator pada masukan fuzzy), pada simulasi tanpa gangguan terdapat error lintasan dengan range 0,17m – 89,4m dan rata-rata 47m, pada simulasi dengan gangguan terdapat error lintasan dengan range 0,16m – 110,6m dan rata-rata 49,5m.
• Waktu yang dibutuhkan untuk menempuh tujuan (lintasan target) di Kepulauan Riau sebesar 10,26 jam sedangkan untuk lintasan aktual hasil simulasi waktu yang dibutuhkan untuk menempuh tujuan sebesar 10,50 jam
• Sistem pengendalian yang telah dirancang, dapat digunakan untuk berbagai jenis lintasan, tidak hanya lintasan pada Kepulauan Riau
6. DAFTAR PUSTAKA
1.Fossen, T.I.,“Guidance And Control Of Ocean Vehicles”. 2.Thing dkk, “Kendali Logika Fuzzy Dengan Metoda Defuzzifikasi Center Of Area And Mean Of Maxima”, Teknik Elektro.Uk Petra 3.http://arbytambang07.blogspot.com/
Biodata Penulis:
Nama : Illa Rizianiza NRP : 2406 100 074 Alamat: Arif Rahman Hakim 104 Riwayat Pendidikan: -TK Prabhakti -SDN Mojokrapak I -SLTPN I Tembelang -SMAN II Jombang -Teknik Fisika ITS Surabaya