Block Diagrams 17
326
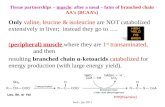
Exciter AC7B and ESAC7B C E R sT + 1 1 Σ Σ REF V S V UEL V + − + Σ 1 E sT E K D K π ( ) EX N F f I = C FD N E KI I V = ( ) X E E E V VS V = + − + − + + + + FE V X V E V EX F FD I FD E Σ Σ Exciter AC7B and ESAC7B IEEE 421.5 2005 Type AC7B Excitation System Model 1 IR DR PR DR K sK K s sT + + + L FE -K V + C V AC7B supported by PSSE ESAC7B supported by PSLF with optional speed multiplier RMAX V FEMAX D FD E E E V -K I K +S (V ) π IA PA K K s + AMAX V A V Σ 2 F K 1 F K + + 3 1 F F sK sT + − P T KV EMIN V AMIN V RMIN V N I E t IR DR A 1 - V 2 - Sensed V 3 - K 4 - K 5 - V 6 - Feedback States 1 2 3 4 5 6 Speed 1 0 Spdmlt
-
Upload
carlos-mohan -
Category
Documents
-
view
166 -
download
2
Transcript of Block Diagrams 17

Exciter AC7B and ESAC7B
CE
RsT+11
Σ Σ
REFV
SV
UELV
+
−
+
Σ1
EsT
EK
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
( )X E E EV V S V=
+
−
+
−
+
++
+
FEV
XV
EV
EXF
FDI
FDE
Σ Σ
Exciter AC7B and ESAC7B IEEE 421.5 2005 Type AC7B Excitation System Model
1IR DR
PRDR
K sKKs sT
+ ++
L FE-K V
+
CV
AC7B supported by PSSEESAC7B supported by PSLF with optional speed multiplier
RMAXVFEMAX D FD
E E E
V -K IK +S (V )
πIAPA
KKs
+
AMAXV
AV
Σ 2FK
1FK
+
+
3
1F
F
sKsT+
−
P TK V
EMINVAMINVRMINV
NI
E
t
IR
DR
A
1 - V2 - Sensed V3 - K4 - K5 - V6 - Feedback
States
12
3 4
5
6
Speed
10
Spdmlt

Exciter AC8B
RsT+11
Σ 1A
A
KsT+
RMAXV
RMINV
REFV SV
+−
+
+
Exciter AC8B IEEE 421.5 2005 AC8B Excitation System
RVΣ
Model supported by PSSE
COMPV
1
EsT
( )E E EK S V+
DK
( )EX NF f I=
C FDN
E
K IIV
=
−
+
+
EXF
FDI
FDE
Σ
NI
Σ π
FEV
52
E
t
R
1 - V2 - Sensed V3 - PID 14 - PID 25 - V
States
3
1
4
FEMAX D FD
E E E
V -K IK +S (V )
EMINV
1IR DR
PRDR
K sKKs sT
+ ++
++
+
UELV OELV
PIDMAXV
PIDMINV

Exciter BBSEX1
3
4
11
sTsT
++ Σ
REFV
Σ1
1 EsT++
−
Exciter BBSEX1 Transformer-fed Excitation System
RMAXV
RMINV+
Σ+
− +
1
2 2
1 111
TK T sT
− +
2
1
TKT+
Model supported by PSSEVery similar to the model EXBBC supported by PSLF
CE
FDE
T FDMINE E
T FDMAXE E
Switch 0= Switch 1=
SupplementalSignal
11 FsT+

Exciter BPA_EA
TV
RsT+11
1
11 AsT+Σ
REFV
+
−+
Σ1
EsT
E ES K+
+
−
Exciter BPA_EA Continuously Acting DC Rotating Excitation System Model
1A
A
KsT+
1F
F
sKsT+
Model in the public domain, available from BPA
STBV
FDE
Σ−
+
RMAXV
RMINV
RegulatorExciter
Filter
Stabilizer
FD
t
R
R1
F
1 - E2 - Sensed V3 - V4 - V5 - V
States
3 4
5
12

Exciter BPA EB
RsT+11
1
11 AsT+Σ
REFV
+
−+
Σ1
EsT
E ES K+
+
−
Exciter BPA EB Westinghouse Pre-1967 Brushless Excitation System Model
1A
A
KsT+
1F
F
sKsT+
Model in the public domain, available from BPA
STBV
FDEΣ−
+
RMAXV
RMINV
Regulator Exciter
Filter
Stabilizer
1
11 FsT+
FDMAXE
FDMINE 0=
TV
FD
t
R
R1
F
F1
1 - E before limit2 - Sensed V3 - V4 - V5 - V6 - V
States
3 4
5
12
6

Exciter BPA EC
1
11 AsT+Σ
REFV
+
−
+
Σ1
EsT
E ES K+
+
−
Exciter BPA EC Westinghouse Brushless Since 1966 Excitation System Model
1A
A
KsT+
1F
F
sKsT+
Model in the public domain, available from BPA
STBV
FDEΣ−
+
RMAXV
RMINV
Regulator Exciter
Stabilizer
FDMAXE
FDMINE 0=
E ES K+
TV3
4
12
FD
R
R1
F
1 - E before limit2 - V3 - V4 - V
States

Exciter BPA ED
Exciter BPA ED SCPT Excitation System Model
Model in the public domain, available from BPA
RsT+11
Σ
REFV
SV
+
−+
Σ1
EsT+
+
FDE
RVΣ−
+
20.78
If 1, 0
FD
THEV
B
IAV
A V
⋅= > =
1F
F
sKsT+
0
BMAXV
BV
THEV P T I TV K V jK I= +
1 A−FDI
Σ+
−
EK
π
1A
A
KsT+
RMAXV
RMINV
1
11 AsT+
Stabilizer
Regulator Exciter
'TV
TV
TITHEVV
3 4
5
12
t
A
R
1 - EField2 - Sensed V3 - V4 - V5 - Feedback
States

Exciter BPA EE
'TV
REFV
−
+
Σ1
EsT
E ES K+
+
−
Exciter BPA EE Non-Continuously Active Rheostatic Excitation System Model
'
1A
RH
KsT
∗
+
Model in the public domain, available from BPA
FDE+
RMAXV
RMINV
Regulator Exciter
FDMAXE
FDMINE
Σ
If:, , ,
T V R RMAX
T V R RH
T V R RMIN
V K V VV K V VV K V V
∆ ≥ =
∆ < =
∆ ≤ − =
RV
'TV
'TOV
−
+
Σ TV∆
RHV
RH'
* NOTE:If the time constant T is equal to
zero, this block is represented as K /sA
1
2
RH
1 - EField before limit2 - V
States

Exciter BPA EF
Σ
REFV
+
−
+
Σ1
EsT
E ES K+
+
−
Exciter BPA EF Westinghouse Continuous Acting Brushless Rotating Alternator
Excitation System Model
1F
F
sKsT+
Model in the public domain, available from BPA
SOV
FDEΣ−
+
RMAXV
RMINV
Regulator Exciter
Stabilizer
FDMAXE
FDMINE 0=
E ES K+
( )TV
T 0R =
(1 )A AK sTs+
3
12
R
F
1 - EField before limit2 - V3 - V
States

Exciter BPA EG
Exciter BPA EG SCR Equivalent Excitation System Model
Model in the public domain, available from BPA
Σ
REFV
SOV
+
−
+
FDE
RVΣ−
+
1F
F
sKsT+
1A
A
KsT+
RMAXV
RMINV
1
11 AsT+
Stabilizer
Regulator
TV
3
12
A
F
1 - EField2 - V3 - V
States

Exciter BPA EJ
1
11 AsT+
REFV
+
+
Exciter BPA EJ Westinghouse Static Grand Couple PP#3 Excitation System Model
1A
A
KsT+
1F
F
sKsT+
Model in the public domain, available from BPA
'TV
FDEΣ−
+
RMAXV
RMINV
Regulator
Stabilizer
FDMAXE
FDMINE
SOV
11 RsT+ − Σ
Filter
π3
4
12
t
R
F
1 - EField before limit2 - Sensed V3 - V4 - V
States

Exciter BPA EK
1
11 AsT+Σ
REFV
+
−
+
Σ1
EsT
E ES K+
+
−
Exciter BPA EK General Electric Alterrex Excitation System Model
1A
A
KsT+
1F
F
sKsT+
Model in the public domain, available from BPA
SOV
FDEΣ−
+
RMAXV
RMINV
Regulator Exciter
Stabilizer
FDMAXE
FDMINE 0=
T
R
V(T =0)
3
4
12
R
R1
F
1 - EField before limit2 - V3 - V4 - V
States

Exciter BPA FA
Exciter BPA FA WSCC Type A (DC1) Excitation System Model
Model in the public domain, available from BPA
FV
SV
1
EsTFDE
−
+
1F
F
sKsT+
VR( )C T C C TV V R jX I= + +TV
TI Σ+
−
E ES K+
11
C
B
sTsT
++
RMAXV
RMINV
1A
A
KsT+
ERRV +
FEV
RsT+11CV
Σ
REFV
−
+
Σ3
4
5
1
2
t
B
R
F
1 - EField2 - Sensed V3 - V4 - V5 - V
States

Exciter BPA FB
Exciter BPA FB WSCC Type B (DC2) Excitation System Model
Model in the public domain, available from BPA
FV
SV
1
EsTFDE
−
+
1F
F
sKsT+
VR( )C T C C TV V R jX I= + +TV
TI Σ+
−
E ES K+
11
C
B
sTsT
++
T RMAXV V
T RMINV V
1A
A
KsT+
ERRV +
FEV
RsT+11CV
Σ
REFV
−
+
Σ3
4
5
1
2
t
B
R
F
1 - EField2 - Sensed V3 - V4 - V5 - V
States

Exciter BPA FC
1A
A
KsT+
RMAXV
RMINV
1F
F
sKsT+
0
SV
+Σ
FV
1
EsT
EK
DK
( )EX NF f I=
C FDN
E
K IIV
=
+
−−
+
+
FEV
RVEV
EXF
FDI
FDE
Σ
NI
( )C T C C TV V R jX I= + +TV
TI
ERRV
RsT+11CV
REFV
−
+
Exciter BPA FC WSCC Type C (AC1) Excitation System Model
Model in the public domain, available from BPA
π11
C
B
sTsT
++
Σ
Σ+
34
5
1
2
E
t
R
LL
F
1 - V2 - Sensed V3 - V4 - V5 - V
States

Exciter BPA FD
1A
A
KsT+
RMAXV
RMINVSV
+
+Σ
1
EsT
EK
+
−
FDE
Exciter BPA FD WSCC Type D (ST2) Excitation System Model
1F
F
sKsT+
FV 0
π
+
BV
E P T I TV K V jK I= +TV
TI
( )EX NF f I=C FDN
E
K IIV
=FDI NI EXF
MAXEFD
+−
EV If 0. and 0., 1.P I BK K V= = =
RV
Model in the public domain, available from BPA
( )C T C C TV V R jX I= + +TV
TI
ERRV
RsT+11CV
REFV
−
+
Σ
Σ
Σ3
4
1
2
t
R
F
1 - EField2 - Sensed V3 - V4 - V
States

Exciter BPA FE
Exciter BPA FE WSCC Type E (DC3) Excitation System Model
ERRV RMAX RMIN
V RH
V VsK T
−
RMAXV
RMINV
If , If , If ,
ERR V R RMAX
ERR V R RH
ERR V R RMIN
V K V VV K V VV K V V
≥ =
< =
≤ − =
RHV
VK−
VK
Σ1
EsT
E EK S+
FDE+
−RV
Model in the public domain, available from BPA
( )C T C C TV V R jX I= + +TV
TI RsT+11CV
REFV
−
+
Σ
FEV
3
1
2
t
RH
1 - EField before limit2 - Sensed V3 - V
States

Exciter BPA FF
11
C
B
sTsT
++
SV
+
Σ1
EsT
E EK S+
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
+
−
+
+
FEV
RVEV
EXF
FDI
FDE
Σ
Exciter BPA FF WSCC Type F (AC2) Excitation System Model
1A
A
KsT+
AMAXV
AMINV
1F
F
sKsT+
0−
FV LV
LVGateΣ
AV
+
RMINV
RMAXV
BK
LK
HK
Σ −
+
LRVHV
NI
−
Model in the public domain, available from BPA
( )C T C C TV V R jX I= + +TV
TI RsT+11CV
REFV
−
+
Σ
ERRV
Σ+ 34
5
1
2
E
t
A
LL
F
1 - V2 - Sensed V3 - V4 - V5 - V
States

Exciter BPA FG
1A
A
KsT+
Exciter BPA FG WSCC Type G (AC4) Excitation System Model
11
C
B
sTsT
++
Model in the public domain, available from BPA
FDE+
IMIMV
IMAXV
( )C T C C TV V R jX I= + +TV
TI RsT+11CV
REFV
−
+
Σ
VS
ERRV
ΣRMIN C FD(V K I )−
RMAX C FD(V K I )−
+
3 1
2
t
LL
1 - EField before limit2 - Sensed V3 - V
States

Exciter BPA FH
11
C
B
sTsT
++
SV+
Σ1
EsT
E EK S+
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
+
−
+
+
FEV
RVEV
EXF
FDI
Σ
Exciter BPA FH WSCC Type H (AC3) Excitation System Model
1A
A
KsT+
AMAXV
AMINV
1 F
ssT+
0−
FV
+AV
RK
NI
HVGate π
LVK −
+
LVV
Σ
EFD
NV
FK
NK
FDNE
Model in the public domain, available from BPA
FDE
( )C T C C TV V R jX I= + +TV
TI RsT+11CV
REFV
−
+
ERRV
Σ
Σ34
5
1
2
E
t
A
LL
F
1 - V2 - Sensed V3 - V4 - V5 - V
States

Exciter BPA FJ
1A
A
KsT+
Exciter BPA FJ WSCC Type J Excitation System Model
11
C
B
sTsT
++
Model in the public domain, available from BPA
FDE+
RMAXV
RMINV
( )C T C C TV V R jX I= + +TV
TI RsT+11CV
REFV
−
+
Σ
SV
ERRV
T FDMAX C FD(V E K I )−
+
1F
F
sKsT+
T FDMIN C FD(V E K I )−
Σ−
FV
3
4
1
2
t
LL
F
1 - EField before limit2 - Sensed V3 - V4 - V
States

Exciter BPA FK
1A
A
KsT+
Exciter BPA FK WSCC Type K (ST1) Excitation System Model
11
C
B
sTsT
++
Model in the public domain, available from BPA
FDE+
( )C T C C TV V R jX I= + +TV
TI RsT+11CV
REFV
−
+
Σ
VS
ERRV
T RMAX C FD(V V K I )−
+
1F
F
sKsT+
T RMIN C FD(V V K I )−
Σ−
IMIMV
IMAXV
FV
3
4
1
2
t
LL
F
1 - EField before limit2 - Sensed V3 - V4 - V
States

Exciter BPA FL
SV
REFV
+
+
+Σ+
FDE
Exciter BPA FL WSCC Type L (ST3) Excitation System Model
IMINV
IMAXV
J1K1
C
B
sTsT
++
−
GV
AV
GK
1A
A
KsT+
RMAXV
RMINV
RVπ
π( )PE T I P L TV K V j K K X I= + +TV
TI
( )EX NF f I=C FDN
E
K IIV
=FDI NI
EXF
EV
BV
FDMAXE
GMAXV
jP PK K e pθ=
( )C T C C TV V R jX I= + +TV
TI RsT+11CV
REFV
−
+
ERRV
Σ
Σ
Model in the public domain, available from BPA
3 1
2
M
t
LL
1 - V2 - Sensed V3 - V
States

Exciter BPA FM through BPA FV
Exciter BPA FM through BPA FV
No block diagrams have been created

Exciter DC3A and ESDC3A
Exciter DC3A IEEE 421.5 2005 DC3A Excitation System Model
DC3A model supported by PSSE ESDC3A model supported by PSLF
States 1 - EFD 2 – Sensed Vt 3 - VRH
ERRVRMAX RMIN
V RH
V VsK T
−
RMAXV
RMINV
If , If , Else
ERR V R RMAX
ERR V R RMIN
R RH
V K V VV K V V
V V
≥ =≤ − ==
RHVVK−
VK
Σ1
E EK sT+FDE
+
−
RV
RsT+11CV
REFV
−
+
Σ
π
( )X EV EFD S EFD= ⋅XV Speed
10
Spdmlt
31
2
If exclim 0 then 0 else unlimited<>

Exciter DC4B and ESDC4B
RsT+11
UEL(UEL=1)
V
REFV
+−+
FDE
Exciter DC4B IEEE 421.5 2005 DC4B Excitation System Model
1A
A
KsT+
T RMAXV V
T RMINV V
1F
F
sKsT+
−
OEL(OEL=2)
V
HVGate
LVGate
Alternate UEL Inputs
Alternate OEL InputsOEL
(OEL=1)
V
+
CE
UEL(UEL=2)
V
SV
1I D
PD
K sKKs sT
+ ++Σ
RMAX AV K
RMIN AV K
1
EsT
EMINV
π Σ π
EK
( )X E E EV V S V=
−
Σ
RV
TV
+
+
−+
FV
FD
t
R
1 - E2 - Sensed V3 - PID14 - PID25 - V6 - Feedback
States
3 4
5
6
12
Speed
10
Spdmlt
Vu
DC4B model supported by PSSE ESD4B model supported by PSLF

Exciter EMAC1T
CE
RsT+11
Σ
REFV
∑
+
−
+
Σ1
EsT
EK
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
( )X E E EV V S V=
+
−
+
++
+
FEV
RV
XV
EV
EXF
FDI
Σ
1A
A
KsT+
AMAXV
1F
F
sKsT+
0−
FV
SV
AMINV
FDE4 4
3
11
sTsT
++
2
1
11
sTsT
++
6
5
11
sTsT
++
Exciter EMAC1T Modified IEEE Type AC1 Excitation System Model
Model supported by PSSE
1
2
3
5
6
7
FE
FE
sTsK+1
+
States 1 : VE 2 : Sensed Vt 3 : VR 4 : VLL34 5 : VF 6 : VLL56 7 : VLL56 8 : FBFE

Exciter ESAC1A
CE
RsT+11 1
1C
B
sTsT
++Σ
REFV
+
−
+
Σ1
EsT
EK
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
( )X E E EV V S V=
+
−
+
++
+
FEV
RV
XV
EV
EXF
FDI
Σ Σ
Exciter ESAC1A IEEE Type AC1A Excitation System Model
1A
A
KsT+
AMAXV
RMINV
RMAXV
1F
F
sKsT+
0−
UELV
HVGate
OELV
LVGate
FV
Model supported by PSSEModel supported by PSLF with optional speed multiplier
SV
AMINV
FDE3
4
5
12
E
t
A
LL
F
1 - V2 - Sensed V3 - V4 - V5 - V
States
Speed
10
Spdmlt

Exciter ESAC2A
E
1sTR
11+sT
C
B
1+sT1+sT BK
HK
F
F
sK1+sT EK
X E E EV =V S (V ) EX NF =f(I )
DK
C FDN
E
K II =V
CE REFV
FV
++
−
−
AV+
−
UELV OELVAMAXV
AMINV HV
RV −
+
RMINV
RMAXV
0
EV
FEMAX D FD
E E E
V -K IK +S (V )
FDE
EXF
XV NI
FEV
+
+
+
+
FDI
Exciter ESAC2A IEEE Type AC2A Excitation System Model
Model supported by PSSEModel supported by PSLF with optional speed multiplier
A
A
K1+sT
SV
34
5
1
2Σ Σ Σ
Σ
Σ
πHVGate
LVGate
E
t
A
LL
F
1 - V2 - Sensed V3 - V4 - V5 - V
States
Speed
10
Spdmlt

Exciter ESAC3A
CE
RsT+11 1
1C
B
sTsT
++Σ Σ 1
A
A
KsT+
AMAXV
AMINV
1 F
ssT+
FEMAX D FD
E E E
V -K IK +S (V )
EMINV
REFV
SV
UELV
HVGate
+
−
+
π Σ
FV
1
EsT
RK
EK
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
( )X E E EV V S V=
+
−
+
−
+
++
+
FEV
AV RV
XV
EV
EXF
FDI
FDE
EFD
NV
FK
NK
NV
Σ Σ
Model supported by PSSEModel supported by PSLF with optional speed multiplier
CV
NI
Exciter ESAC3A IEEE Type AC3A Excitation System Model
3
4
5
12
E
t
A
LL
F
1 - V2 - Sensed V3 - V4 - V5 - V
States
Speed
10
Spdmlt

Exciter ESAC4A
CERsT+1
1 11
C
B
sTsT
++Σ 1
A
A
KsT+
RMAX C IFDV -K I
RMINV
REFV
SV
UELV
HVGate
+
−
+
FDE
Exciter ESAC4A IEEE Type AC4A Excitation System Model
IMINV
IMAXV
IV
FD
Model supported by PSLF and PSSEPSSE uses nonwindup limit on E
3 12
t
LL
1 - EField before limit2 - Sensed V3 - V
States

Exciter ESAC5A
CE
RsT+11
Σ 1A
A
KsT+
RMAXV
RMINV 0
REFV
SV
+
−
+
Σ1
EsT
EK
( )X E E EV V S V= ⋅
+
−
+
+
XV
FDE
F2 F3If T =0, then sT =0. Σ
Exciter ESAC5A IEEE Type AC5A Excitation System Model
( )( )( )
3
1 2
11 1
F F
F F
sK sTsT sT
++ +
−
Model supported by PSLF and PSSE
3
4 5
12
t
R
1 - EField2 - Sensed V3 - V4 - Feedback 15 - Feedback 2
States

Exciter ESAC6A
CE
RsT+11 1
1C
B
sTsT
++Σ Σ
REFV
SV
UELV
+
−+
ΣAV
1
EsT
EK
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
( )X E E EV V S V=
+
−
+
−
+
++
+
FEV
RV
XV
EV
EXF
FDI
FDE
Σ Σ
Exciter ESAC6A IEEE Type AC6A Excitation System Model
( )11
A K
A
K sTsT+
+
AMAXV
AMINV T RMINV V
T RMAXV V
HK11
J
H
sTsT
++
HMAXV
0
0HV Σ +
FELIMV−
+
CV
Model supported by PSSEModel supported by PSLF with optional speed multiplier
NI
3 4
5
12
E
t
A
LL
F
1 - V2 - Sensed V3 - T Block4 - V5 - V
States
Speed
10
Spdmlt

Exciter ESAC7B and AC7B ESAC7B is the same as AC7B. See AC7B documentation

Exciter ESAC8B_GE
RsT+11
Σ 1A
A
KsT+
RMAXV
RMINV
REFV
SV
+−
+
+
Exciter ESAC8B_GE IEEE Type AC8B with Added Speed Multiplier.
RVΣ+
+
+
IRKs
PRK
1DR
DR
sKsT+
TMULT RMAX T RMAX RMIN T RMIN
Model supported by PSLFIf V 0, V V V and V V V<> = =
COMPV
1
EsT
( )E E EK S V+
DK
( )EX NF f I=
C FDN
E
K IIV
=
−
+
+
EXF
FDI
FDE
Σ
NI
Σ π
FEV
52
E
t
R
1 - V2 - Sensed V3 - PID 14 - PID 25 - V
States
3 1
4
FEMAX D FD
E E E
V -K IK +S (V )
EMINV
Speed
10
Spdmlt

Exciter ESAC8B_PTI
RsT+11
1A
A
KsT+
RMAXV
RMINV 0
REFV
SV
+
−
+
Σ1
EsT
EK
( )X EV EFD S EFD= ⋅
+
−
+
+
XV
FDE
Σ
Exciter ESAC8B_PTI Basler DECS Model
RV
+
+
+
IRKs
PRK
1DR
D
sKsT+
Model supported by PSSE
CV
3
4 5 12
FD
t
R
1 - E2 - Sensed V3 - Derivative Controller4 - Integral Controller5 - V
States
ΣΣ

Exciter ESDC1A
CE
RsT+11
Σ 1A
A
KsT+
RMAXVREFV
SV
+
−
+
Σ1
EsT
EK
( )X EV EFD S EFD= ⋅
+
−
+
+
XV
FDE
Σ
Exciter ESDC1A IEEE Type DC1A Excitation System Model
RV
11F
F
sKsT+
11
C
B
sTsT
++CV
UELV
HVGate
FV
FEV
Model supported by PSSE but always assumes values of spdmlt = 0, UELin = 0, and exclim = 1Model supported by PSLF
−
RMINV
3
4
5
12
FD
t
R
F
1 - E2 - Sensed V3 - V4 - V5 - Lead-Lag
States
π
Speed
10
Spdmlt
+
Alternate UEL Inputs
UEL ≥ 2 UEL < 2 UELV
if exclim <> 0 then limit = 0 else unlimited

Exciter ESDC2A
RsT+11
Σ 1A
A
KsT+
T RMAXV VREFV
SV
+
−
+
Σ1
EsT
EK
( )X EV EFD S EFD= ⋅
+
−
+
+
XV
FDE
Σ
Exciter ESDC2A IEEE Type DC2A Excitation System Model
RV
11F
F
sKsT+
11
C
B
sTsT
++CV
HVGate
Model supported by PSSE but always assumes values of spdmlt = 0, UELin = 0, and exclim = 1Model supported by PSLF
CE
FV
T RMINV V
FEV
−
3
4
5
12
FD
t
R
F
1 - E2 - Sensed V3 - V4 - V5 - Lead-Lag
States
π
Speed
10
Spdmlt
UELVAlternate UEL Inputs
UEL ≥ 2 UEL < 2 UELV
+
if exclim <> 0 then limit = 0 else unlimited

Exciter ESDC3A
Exciter ESDC3A IEEE Type DC3A with Added Speed Multiplier
ERRVRMAX RMIN
V RH
V VsK T
−
RMAXV
RMINV
If , If , Else
ERR V R RMAX
ERR V R RMIN
R RH
V K V VV K V V
V V
≥ =≤ − ==
RHVVK−
VK
Σ1
E EK sT+FDE
+
−
RV
Model supported by PSLF
RsT+11CV
REFV
−
+
Σ
π
( )X EV EFD S EFD= ⋅XV Speed
10
Spdmlt
t
RH
1 - EField2 - Sensed V3 - V
States
31
2
If exclim 0 then 0 else unlimited<>

Exciter ESST1A and ESST1A_GE
RsT+11
Σ
REFV
+
−
+
Σ+
−AV FDE
Exciter ESST1A IEEE Type ST1A Excitation System Model
1A
A
KsT+
AMAXV
AMINV
1F
F
sKsT+
0
−
HVGate
IMINV
( )( )( )( )
1
1
1 11 1
C C
B B
sT sTsT sT
+ ++ +
HVGate
OELV
LVGate
IV
T RMINV V
T RMAX C FDV V -K I
LRK Σ FDI
LRI
AlternateStabilizer
Inputs
AlternateUEL Inputs
+
+−
+CE
FV
3 4
5
12
A
t
1 - V2 - Sensed V3 - LL4 - LL15 - Feedback
States
Support in PSLF and PSSE. Different integer codes for VOS (or PSSin), and UEL codes
VUEL ESST1A: UEL=1 ESST1A_GE: UEL=2
VUEL ESST1A: UEL=3
ESST1A_GE: UEL= -1
VUEL ESST1A: UEL=2 ESST1A_GE: UEL= +1 VS
ESST1A: VOS=1 ESST1A_GE: PSSin=0
VS ESST1A: VOS=2
ESST1A_GE: PSSin=1

Exciter ESST2A
RsT+11
Σ 1A
A
KsT+
RMAXV
RMINV
REFV
SV
+
−+
Σ1
EsT
EK
+
−
FDE
Exciter ESST2A IEEE Type ST2A Excitation System Model
1F
F
sKsT+
HVGate
FV 0
π
BV
E P T I TV K V jK I= +TV
TI
( )EX NF f I=C FDN
E
K IIV
=FDI NI EXF
MAXEFD
−
EV If 0 and 0, 1P I BK K V= = =
Model supported by PSSE but always assumes values of UEL = 0, T 0, and T 0Model supported by PSLF
C B= =
CE
CVRV
11
C
B
sTsT
++
3
4
12 π
FD
t
R
F
1 - E2 - Sensed V3 - V4 - V5 - LL
States
UELVAlternate UEL Inputs
UEL ≥ 2 UEL < 2 UELV
+
5

Exciter ESST3A
RsT+11
Σ
SV
REFV
+
−
+Σ+
AV FDE
Exciter ESST3A IEEE Type ST3A Excitation System Model
1A
A
KsT+
RMAXV
HVGate
IMINV
IMAXV11
C
B
sTsT
++IV
−
GV
RV
GK
1M
M
KsT+
MMAXV
MMINV
MVπ
π( )PE T I P L TV K V j K K X I= + +TV
TI
( )EX NF f I=C FDN
E
K IIV
=FDI NI
EXF
EV
BVBMAXV
Model supported by PSLF and PSSE
CEUELV
GMAXV
RMINV
PjP PK K e θ=
34 12
M
t
R
1 - V2 - Sensed V3 - V4 - LL
States

Exciter ESST4B
RsT+11
Σ
SV
REFV
+
−
+Σ+
FDE
Exciter ESST4B IEEE Type ST4B Potential- or Compound-Source Controlled-Rectifier Exciter Model
11 AsT+
−
RV
GK
IMPM
KKs
+
MMAXV
MMINV
π
π( )E P T I P L TV K V j K K X I= + +TV
TI
( )EX NF f I=C FDN
E
K IIV
=FDI NI EXF
EVBVBMAXV
RMAXV
RMINVOELV
LVGate
IRPR
KKs
+
+
GMAXModel supported by PSSE but assumes V infiniteModel supported by PSLF
=
UELV
PjP PK K e θ=
COMPV34 12
M
t
A
R
1 - V2 - Sensed V3 - V4 - V
States
GMAXV

Exciter ESST5B and ST5B
Model supported by PSLF (ESST5B) and PSSE (ST5B)
Exciter ESST5B and ST5B IEEE (2005) Type ST5B Excitation System
HV Gate
LV Gate
Vref
+ _
Vrmax/Kr
Vrmin/Kr
Vrmax/Kr
Vrmin/Kr Vrmax/Kr
Vrmin/Kr
Vrmax/Kr
Vrmin/Kr Vrmax/Kr
Vrmin/Kr
Vrmax/Kr
Vrmin/Kr
0
+1
-1
VtVrmax
VtVrmin
+
+
+
_
Vuel
Voel
Vc
Vs
Efd
Ifd
Vrmax
Vrmin
Vr
1
2
7 8
3 4
5 6
States: 1 – Efd 2 – Sensed Vt 3 – LL1 4 – LL2 5 – LLU1 6 – LLU2 7 – LLO1 8 – LLO2

Exciter ESST6B and ST6B
RsT+11
UELVREFV
−FDE
Exciter ESST6B IEEE 421.5 2005 ST6B Excitation System Model
RMAXV
RMINV
1G
G
sKsT+
−
OEL(OEL=2)
V
HVGate
LVGate
Alternate OEL Inputs
OEL(OEL=1)
V
+
ESST6B is the same as model ST6BESST6B is a PSLF model and ST6B is a PSSE model
CV
1IA DA
PADA
K sKKs sT
+ ++Σ
AMAXV
AMINV
Σ
π
CLK
GV
AV
TV
FD
t
G
1 - E2 - Sensed V3 - PID14 - PID25 - V
States
3 4
5
1
2
10 RMULTV
Σ
SV
+
+−
Σ MK Σ
FFK
LRK
BV
RMINV
LRI
FDI
+
−
+
−
++
RVΣ
11 SsT+

Exciter ESST7B and ST7B
RsT+11
REFV
FDE
Exciter ESST7B IEEE 421.5 2005 ST7B Excitation System Model
1IA
IA
sKsT+
OEL(OEL=2)
V
LVGate
Alternate OEL Inputs
OEL(OEL=1)
V
+
ESST7B is the same as model ST7BESST7B is a PSLF model and ST7B is a PSSE model
CV
++
−
LK
HK
Σ
11 SsT+
11
G
F
sTsT
++
HVGate
Alternate UEL Inputs
UEL(UEL=1)
VUEL
(UEL=2)
V
MAXV
MINVΣ
+++
+
DROOPV
SCLVΣ Σ
REF_FBV
SV
PAK
HVGate
LVGate
11
C
B
sTsT
++
Σ Σ
Σ LVGate
HVGate
T RMAXV V
T RMINV V
OEL(OEL=3)
V UEL(UEL=3)
V
T RMAXV VT RMINV V
+
−
+
+
2 3
4
5
1 States: 1 – EField 2 – VTerminalSensed 3 – InputLL 4 – LL2 5 – Feedback

Exciter EWTGFC
Exciter EWTGFC Excitation Control Model for Full Converter GE Wind-Turbine Generators
∑
Model supported by PSLF
+− 1
1 FVsT+
RFQV
11 PsT+
elecP
1
Nf
1PV
V
KsT+
+
∑RsT+1
1
IVKs
MINQ
MAXQ
π
tanFAREFP
REFQ
1
1−
0
Reactive Power Control Model
MINQ
MAXQ
varflg
−genQ
QIKs
MINV
+
−∑
REFVVIKs
QMAXI
QMINI
QCMDI
CV
3
4
5
1
2
ref
qppcmd
PV
regMeas
IV
ORD
Meas
1 - V2 - E
3 - K4 - V
5 - K6 - Q7 - P
States
6
7MAXV
TERMV
+
elecP
dbrK
∑
∑1s
÷PMAXI
−
++
−TERMV
PCMDI
∑
+
pfaflg
REFQ
01
ORDP
Converter Current Limitpqflag
∑
+
−
dbrP
0
1
0 BSTE

Exciter EX2000
RsT+11
Σ Σ IAPA
KKs
+
AMAXV
AMINV
1FK
EMAXV
EMINV
−+
π Σ
FV
1
EsT
PK ETRM⋅
EK
DK
π
( )EX EF f I=
C FDN
E
K IIV
=
( )X E E EV V S V=
+
−
+
−
+
++
+
FEV
AV
XV
EV
EXF
FDI
Σ Σ
Exciter EX2000 IEEE Type AC7B Alternator-Rectifier Excitation System Model
MinimumGate 1
IRPR
KKs
+
RMAXV
RMINV L FEK V−
ReferenceSignal
Field CurrentLimiter
2FKΣ +
+
Model supported by PSSE
EMAX
FEMAX D FDEMAX
E E E
If field current limiter is included, V is off.V -K IIf field current limiter is excluded, V =K +S (V )
CE
FDE
REF 34
12
1st PI Controller 2nd PI Controller
E
t
API
RPI
PI
1 - V2 - Sensed V3 - V4 - V5 - LL6 - IFD
States

Exciter EX2000 REFERENCE SIGNAL MODEL
REF
Exciter EX2000 Reference Signal Model
MinimumGate 2
KRCCSBASE
Machine MVA BASEELECQ1
ETERM
KVHZ
Σ
REFV
UELV
STBV
++
+
−LIMPREF
Frequency
ReactiveCurrent
Reference Signal Model
Model supported by PSSE

Exciter EX2000 FIELD CURRENT LIMITER MODEL
KIIFDKPIFDs
+
REF2IFD
LIMNIFD
Exciter EX2000 Field Current Limiter Model
LevelDetector
LatchGate 1
LatchGate 2
OR
ADVLIMIFD11
LEAD
LAG
sTsT
++
Σ
Advance Limit
( 1, 1)I T
( 3, 3)I T
( 2, 2)I T
( 4, 4)I T
Inverse Timing
A
B
C
D
A
B
C
D
LIMPIFD
REF3IFD
REF4IFD
REF1IFD
FDI
+
−
ToMinimum
Gate 1
Output =1 if level exceeded
Output =1 iftiming expired
Switch Operation Output D = B if C =0Output D = A if C=1
Field Current Limiter Model(Over Excitation Limiter)
Model supported by PSSE
3rd PI Controller
5
6

Exciter EXAC1
RsT+11 1
1C
B
sTsT
++Σ
SVREFV
+
Σ1
EsT
E EK S+
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
+
−
+
+
FEV
RVEV
EXF
FDI
FDE
Σ
Exciter EXAC1 IEEE Type AC1 Excitation System Model
1A
A
KsT+
RMAXV
RMINV
1F
F
sKsT+
0−
FV
Σ+
−+
CV
AMIN AMAX
AMIN
Model supported by PSSE but always assumes value of spdmlt = 0Model supported by PSLF also uses V and V
Simulator will narrow the limit range as appropriate when loading the DYD fileIf V V> RMIN RMIN AMIN
AMAX RMAX RMAX AMAX
then V VIf V V then V V
Model supported by PSLF but always assumes value of spdmlt = 1
=< =
CE
E
t
R
LL
F
1 - V2 - Sensed V3 - V4 - V5 - V
States
34
5
12
Speed
10
Spdmlt

Exciter EXAC1A
RsT+11 1
1C
B
sTsT
++Σ
SVREFV
+
Σ1
EsT
E EK S+
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
+
−
+
+
FEV
RVEV
EXF
FDI
FDE
Σ
Exciter EXAC1A Modified Type AC1 Excitation System Model
1A
A
KsT+
RMAXV
RMINV
1F
F
sKsT+
0−
FV
Σ+
−+
CV
Model supported by PSSE but always assumes value of spdmlt = 0Model supported by PSLF but always assumes value of spdmlt = 1
CE
34
5
12
E
t
R
LL
F
1 - V2 - Sensed V3 - V4 - V5 - V
States
Speed
10
Spdmlt

Exciter EXAC2
RsT+11 1
1C
B
sTsT
++Σ
SVREFV
+
Σ1
EsT
E EK S+
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
+
−
+
+
FEV
RVEV
EXF
FDI
FDE
Σ
Exciter EXAC2 IEEE Type AC2 Excitation System Model
1A
A
KsT+
AMAXV
AMINV
1F
F
sKsT+
0−
FV
Σ+
− +
CVLV
LVGateΣ
AV
+
RMINV
RMAXV
BK
LK
HK
Σ −
+
LRV
HV
NI
−
Model supported by PSSE but always assumes value of spdmlt = 0Model supported by PSLF but always assumes value of spdmlt = 1
CE 34
5
12
E
t
A
LL
F
1 - V2 - Sensed V3 - V4 - V5 - V
States
Speed
10
Spdmlt

Exciter EXAC3
RsT+11 1
1C
B
sTsT
++Σ
SVREFV
+
Σ1
EsT
E EK S+
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
+
−
+
+
FEV
RVEV
EXF
FDI
Σ
Exciter EXAC3 IEEE Type AC3 Excitation System Model
1A
A
KsT+
AMAXV
AMINV
1 F
ssT+
0−
FV
Σ+
−
+CV AV
RK
NI
HVGate π
LVK −
+
LVV
Σ
EFD
NV
FK
NK
NEFD
FEMAXModel supported by PSSE but always assumes values of V 9999 and spdmlt = 0Model supported by PSLF but always assumes value of spdmlt = 1
=
CE
FDE34
5
12
E
t
A
LL
F
1 - V2 - Sensed V3 - V4 - V5 - V
States
FEMAXVSpeed
10
Spdmlt

Exciter EXAC3A
RsT+11 1
1C
B
sTsT
++ Σ
SV
REFV
+
Σ1
EsT
E EK S+
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
+
−
+
+
FEV
RVEV
EXF
FDI
Σ
Exciter EXAC3A IEEE Type AC3 Excitation System Model
1A
A
KsT+
AMAXV
AMINV
1 F
ssT+
EMINV−
FV
Σ+
−+
AV
NI
π
RK
EFD
NV
FK
NK
NEFD
CEFDE
EMAXV Speed
Model supported by PSLF
( )
( )
L1 C S REF C FFEMAX
FA L1
FEMAX D FDEMAX
E E
LVEMIN
EX
K V +V +V -V -VV =
K KV -K I
V =S +K
VV =F
34
5
12
E
t
A
LL
F
1 - V2 - Sensed V3 - V4 - V5 - V
States
CV

Exciter EXAC4
RsT+11 1
1C
B
sTsT
++Σ
SVREFV
+
FDE
Exciter EXAC4 IEEE Type AC4 Excitation System Model
1A
A
KsT+Σ
+−
+ERRV
IMINV
IMAXV
RMIN C IFDV -K I
RMAX C IFDV -K I
Model supported by PSLF and PSSE
CE3 12
t
LL
1 - EField before limit2 - Sensed V3 - V
States

Exciter EXAC6A
Exciter EXAC6A IEEE Type AC6A Excitation System Model
Model supported by PSLF
RsT+11 1
1C
B
sTsT
++ Σ
SV
REFV
+
Σ1
EsT
E EK S+
π
( )EX NF f I=
C FDN
E
K IIV
=
+
−
+
+
FEV
EV
EXF
Σ
(1 )1A k
A
K sTsT+
+
T RMAXV V
AMINV
11
J
H
sTsT
++
0−
HV
Σ+
− +
NI
HK
CE
FDE
Speed
HMAXV
AMAXV
AV
0
+
−Σ
FELIMV
T RMINV V
DK FDI
RV3 4
5
12
E
t
A
LL
F
1 - V2 - Sensed V3 - T Block4 - V5 - V
States

Exciter EXAC8B
Exciter EXAC8B Brushless Exciter with PID Voltage Regulator
Model supported by PSLF
RsT+11
Σ1
1 AsT+
RMAXV
RMINV
REFV
SV
+−+
+Σ+
++
VIKs
VPK
1VD
VD
sKsT+
CE
Σ1
EsT
E EK S+
π
( )EX NF f I=
C FDN
E
K IIV
=
−
+
+
FEV
EV
EXF
Σ
0
NI
FDE
Speed
DK FDI
IMAX-V
IMAXV3
4
5 12
E
t
R
1 - V2 - Sensed V3 - V4 - Derivative5 - Integral
States

Exciter EXBAS
RsT+11 1
1C
B
sTsT
++Σ
STBVREFV
+
Σ1
EsT
E EK S+
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
+
−
+
+
EV
EXF
FDI
Σ
Exciter EXBAS Basler Static Voltage Regulator Feeding DC or AC Rotating Exciter Model
1A
A
KsT+
RMAXV
RMINV
1F
F
sKsT+
−
Σ+
− +
UELV
NI1
2
11
F
F
sTsT
++
IP
KKs
+
OELV
+ +
Model supported by PSSE
CE
FDE3
4 5
12
E
t
R
1 - V2 - Sensed V3 - V4 - PI5 - LL6 - Feedback LL7 - Feedback
States
67

Exciter EXBBC
3
4
11
sTsT
++ Σ
REFV
Σ1
1 EsT+
EX
+
−
FDI
Exciter EXBBC Transformer-fed Excitation System
RMAXV
RMINV+
Σ+
− +
1
2 2
1 111
TK T sT
− +
2
1
TKT+
Very similar to the model BBSEX1 supported by PSSEModel supported by PSLF
CE
FDEΣ
T FDMINE E
T FDMAXE E
Switch 0= Switch 1=
SupplementalSignal
+
−
11 FsT+

Exciter EXDC1
Exciter EXDC1 IEEE DC1 Excitation System Model
Model supported by PSLF
RsT+11
Σ
SV
REFV
+
+1
A
A
KsT+
RMAXV
RMINV
Σ1
EsT
E EK S+
+
−
11F
F
sKsT+
RV−
CE
− π
Speed
FDE11
C
B
sTsT
++
FV
3 4
5
1
2
FD
t
B
R
F
1 - E2 - Sensed V3 - V4 - V5 - V
States

Exciter EXDC2A
RsT+11 1
1C
B
sTsT
++Σ
+
Exciter EXDC2A IEEE Type DC2 Excitation System Model
−
1A
A
KsT+
RMAX TV V
Σ1
EsT
E EK S+
+
−
11F
F
sKsT+
RV−
Model supported by PSLF
CE
FV
SV
REFV+
π
Speed
FDE34
5
1
2
RMIN TV V
FD
t
B
R
F
1 - E2 - Sensed V3 - V4 - V5 - V
States

Exciter EXDC2_GE
RsT+11 1
1C
B
sTsT
++
SVREFV
+
Exciter EXDC2_GE IEEE Type DC2 Excitation System Model
Σ+
−1
A
A
KsT+
RMAX TV V
Σ1
1 EsT+
E EK S+
FDE+
−
( )( )1 21 1F
F F
sKsT sT+ +
−
Model supported by PSLF
RMIN TV V
compV
π
Speed
3 4
5
1
2
FD
t
B
R
F1
F2
1 - E2 - Sensed V3 - V4 - V5 - V6 - V
States
6

Exciter EXDC2_PTI
RsT+11 1
1C
B
sTsT
++
SVREFV
+
Exciter EXDC2_PTI IEEE Type DC2 Excitation System Model
Σ+
−
1A
A
KsT+
RMAX TV V
Σ1
1 EsT+
E EK S+
FDE+
−
11F
F
sKsT+
−
Model supported by PSEE
RMIN TV V
compV
π
Speed
Σ+ERRV
3 4
5
1
2
FD
t
B
R
F
1 - E2 - Sensed V3 - V4 - V5 - V
States

Exciter EXDC4
Σ+
Exciter EXDC4 IEEE Type 4 Excitation System Model
− 1
RHsT
RMAXV
Σ1
E EK sT++
−RHV
Model supported by PSLF
CE
RMINV
SV
REFV+
π
Speed
FDE
ESRMAXV
RMINVVK
V-K
RV
π
1
-1RK
R-K
1
2
FD
RH
1 - E2 - V
States

Exciter EXELI
11 FVsT+ Σ
REFV
+Σ
+
−
+
+
FDE
Exciter EXELI Static PI Transformer Fed Excitation System Model
PUV
Σ +
Σ1
NUsT
+
11 FIsT+
EX
FDI
FMINE
FMAXE
PIV
PNFV
−
−
+
PNFD
GENP3
1W
W
sTsT
+
2
21s
s
sTsT
−+Σ
+
+
1sK
2
11s
s
KsT+
MAXS−
MAXS
Model supported by PSLF and PSSE
CE
− Σ
3
4 5
12
NU
t
FLD
GEN
GEN
GEN
1 - T2 - Sensed V3 - Sensed I4 - P Washout15 - P Washout26 - P Washout37 - Lag Stabilizer8 - Washout Stabilizer
States
6 7
8

Exciter EXIVO
Model supported by PSLF
Exciter EXIVO IVO Excitation Model
+ Vcomp
Efd 1 2
States: 1 – VLL12 2 – Sensed Vt 3 – VLL34 4 – VLL56
_
VS
3 MIN5
MAX5
MIN1
MAX1
Vref
+
MIN3
MAX3
4

Exciter EXPIC1
RsT+11
Σ
REFV
Exciter EXPIC1 Proportional/Integral Excitation System Model
Σ+
−
+
( )11A AK sTs+
R1V
R2V
1
EsT
E EK S+
FDE+
−
( )( )1 21 1F
F F
sKsT sT+ +
RVTE
SV
AV( )
( )( )3
2 4
11 1
A
A A
sTsT sT
++ +
RMINV
RMAXV
FDMINE
FDMAXE
Σπ0E
−
πTV
TI
( )EX NF f I=C FDN
E
K IIV
=FDI
NI
EXF
BV
0
If 0 and 0, then 1If 0, then
P I B
E
K K VT EFD E
= = == =
E P T I TV K V jK I= +
Model supported by PSLF and PSSE
CE3
4 51
2
FD
t
A
R1
R
F1
F
1 - E2 - Sensed V3 - V4 - V5 - V6 - V7 - V
States
6 7

Exciter EXST1_GE
RsT+11 1
1C
B
sTsT
++Σ
SVREFV
+
FDE
Exciter EXST1_GE IEEE Type ST1 Excitation System Model
1A
A
KsT+
+
−
IMINV
IMAXV
T RMIN C IFDV V -K I
T RMAX C IFDV V -K I
1F
F
sKsT+
−
Model supported by PSLF
compV
1
1
11
C
B
sTsT
++
AMAXV
AMINV
Σ+−
EX
lrK
Σ
FDIΣ
lrI
+
−
+−
3
4
5 12
0
A
t
LL
F
LL1
1 - V2 - Sensed V3 - V4 - V5 - V
States

Exciter EXST1_PTI
RsT+11 1
1C
B
sTsT
++Σ
SVREFV
+
FDE
Exciter EXST1_PTI IEEE Type ST1 Excitation System Model
1A
A
KsT+
+
−
IMINV
IMAXV
T RMIN C IFDV V -K I
T RMAX C IFDV V -K I
1F
F
sKsT+
−
Model supported by PSSE
cE
ERRV+ Σ
3
4
12
FD
t
LL
F
1 - E before limit2 - Sensed V3 - V4 - V
States

Exciter EXST2
RsT+11
Σ
REFV
Exciter EXST2 IEEE Type ST2 Excitation System Model
Σ+
−+
1A
A
KsT+
RMAXV
RMINV
1
EsT
EK
FDE+
−
1F
F
sKsT+
RV Σ−
πE P T I TV K V jK I= +TV
TI
( )EX NF f I=C FDN
E
K IIV
=FDI NI
EXF
If 0 and 0, then 1P I BK K V= = =
Σ++
ERRV
BV
FDMAXE
0
SV
+
EV
B C
Model supported by PSLFModel supported by PSSE does not include T and T inputs
CE3
4
5 12
FD
t
R
F
LL
1 - E2 - Sensed V3 - V4 - V5 - V
States
11
C
B
sTsT
++

Exciter EXST2A
RsT+11
Σ
REFV
Exciter EXST2A Modified IEEE Type ST2 Excitation System Model
Σ+
−+ 1
A
A
KsT+
RMAXV
RMINV
1
EsT
EK
FDE+
−
1F
F
sKsT+
RV Σ−
πE P T I TV K V jK I= +TV
TI
( )EX NF f I=C FDN
E
K IIV
=FDI NI EXF
If 0 and 0, then 1P I BK K V= = =
ERRV
FDMAXE
0
SV
+
EV
π
B C
Model supported by PSLFModel supported by PSSE does not include T and T inputs
FVBV
COMPV11
C
B
sTsT
++
3
4
5 12
FD
t
R
F
LL
1 - E2 - Sensed V3 - V4 - V5 - V
States

Exciter EXST3
RsT+11
Σ
REFV
Exciter EXST3 IEEE Type ST3 Excitation System Model
Σ+−
+
11
CJ
B
sTKsT
++
FDEAV π
π( )E P T I P L TV K V j K K X I= + +TV
TI
( )EX NF f I=C FDN
E
K IIV
=FDI NI EXF
ERRV
BV
FDMAXE
SV
+
EV
∑ 1A
A
KsT+
RMAXV
RMINV
RV+
IMINV
IMAXV
GK
−GV
GMAXV
Model supported by PSSE but always assumes value of spdmlt = 0Model supported by PSLF but always assumes value of spdmlt = 1
CE
PjP PK K e θ=
3 12
R
t
1 - V2 - Sensed V3 - LL
States
π
Speed
10
Spdmlt

Exciter EXST3A
Exciter EXST3A IEEE Type ST3 Excitation System Model
11
CJ
B
sTKsT
++
FDEAV π
π( )E P T I P L TV K V j K K X I= + +TV
TI
( )EX NF f I=C FDN
E
K IIV
=FDI NI EXF
BV
EV
∑ 1A
A
KsT+
RMAXV
RMINV
+
IMINV
IMAXV
GK
−GV
GMAXV
Model supported by PSLF
RsT+11
Σ+
−
CESV
REFV+
BMAXV
SpeedPj
P PK K e θ=
3 12
R
t
1 - V2 - Sensed V3 - LL
States

Exciter EXST4B
Exciter EXST4B IEEE Type ST4B Excitation System Model
FDEπ
π( )E P T I P L TV K V j K K X I= + +
( )EX NF f I=C FDN
E
K IIV
=FDI NI
EXF
BV
EV
∑ IMPM
KKs
+
MMAXV
MMINV
+
RMINV
RMAXV
GK
−
Model supported by PSLF
RsT+11
Σ+
−
CESV
REFV+
BMAXV
11 AsT+
IRPR
KKs
+MV
TV
TI
PjP PK K e θ=
34 12
MInt
t
A
R
1 - V2 - Sensed V3 - V4 - V
States

Exciter EXWTG1
Exciter EXWTG1 Excitation System Model for Wound-Rotor Induction Wind-Turbine Generators
∑
MAXR
MINR
+
Model supported by PSLF
+−Rω 1
1 AsT+ EXT FDR (E )
REFω
1DP
DP
sKsT+EP
WK 1
2
11
W
W
sTsT
++ +
+
EXTR
∑
3
12
external1 - R2 - SpeedReg3 - Washout
States

Exciter EXWTGE
Exciter EXWTGE Excitation System Model for GE Wind-Turbine Generators
∑
Model supported by PSLF
+− 1
1 CsT+ORDQ
RFQ REFV (V )
11 PsT+
EP
1
Nf
1PV
V
KsT+
+
+∑
RsT+11
IVKs
MINQ
MAXQ
π
tan( )⋅FAREF REFP (V ) REF
REF
Q(V ) Switch 0=
Switch 1=
ORDQ
Switch 1= −
Switch 1=
Switch 0=
ORD
REF
Q from separate model(V )
WindVAR Emulation
OpenLoop Control
MINQ
MAXQ
CMDQ
pfaflg
varflg
+−GENQ
∑QIKsCMDQ
MAXV
MINV
+−
TERMV
∑REFV VIKs
TERM QMAXV + XI
TERM QMINV + XI
Q CMD FDE '' (E )
÷ORD SFrom Wind Turbine Model
P (V ) PCMD FDI (I )
PMAXI
REGV
3
4
5
1
2
ref"QCMD
PV
regMeas
IV
ORD
Meas
1 - V
2 - E3 - K4 - V
5 - K6 - Q7 - P
States
6
7
GEWTG machine model

Exciter IEEET1
RsT+11
Σ 1A
A
KsT+
RMAXV
RMINV
REFV
SV
+
−+
Σ1
EsT
EK
E E FDV S E= ⋅
+
−
+
+
EV
Σ
Exciter IEEET1 IEEE Type 1 Excitation System Model
RVΣ−
+
1F
F
sKsT+
Model supported by PSSE but always assumes value of spdmlt = 0Model supported by PSLF but always assumes value of spdmlt = 1
CE
3
4
1
2
t
R
F
1 - EField2 - Sensed V3 - V4 - V
States
FDEπ
Speed
10
Spdmlt

Exciter IEEET2
RsT+11
Σ 1A
A
KsT+
RMAXV
RMINV
REFV
SV
+
−+
Σ1
EsT
EK
E E FDV S E= ⋅
+
−
+
+
EV
FDE
Σ
Exciter IEEET2 IEEE Type 2 Excitation System Model
RVΣ−
+
11F
F
sKsT+2
11 FsT+
Model supported by PSSE
CE
3
45
1
2
t
R
F1
F2
1 - EField2 - Sensed V3 - V4 - V5 - V
States

Exciter IEEET3
RsT+11
Σ 1A
A
KsT+
RMAXV
RMINV
REFV
SV
+
−+
Σ1
E EK sT+
+
+
FDE
Exciter IEEET3 IEEE Type 3 Excitation System Model
RVΣ−
+
20.78
If 1, 0
FD
THEV
B
IAV
A V
⋅= > =
1F
F
sKsT+
0
BMAXV
BV
πTHEV P T I TV K V jK I= +TV
TI
1 A−FDI
Model supported by PSSE
CE
3
4
12
t
R
F
1 - EField2 - Sensed V3 - V4 - V
States

Exciter IEEET4
Σ1
RHsT
RMAXV
RMINV
REFV
+
− Σ1
E EK sT+
+ FDE
Exciter IEEET4 IEEE Type 4 Excitation System Model
RVRHVVΔV K<ΔV
π
ψ
ES
−
Model supported by PSSE
CE
RMAXV
RMINVKV
-KV
1
-1RK
R-K
VΔV K>
12
RH
1 - EField2 - V
States

Exciter IEEET5
Σ1
RHsT
+
− Σ1
E EK sT+
+
Exciter IEEET5 Modified IEEE Type 4 Excitation System Model
RMAXV
π
ψ
ES
−
Model supported by PSSE
CE
RMAXV
RMINVKV
-KV
RMAXV
RMINV
REFV
FDE
RVRHV
VΔV K<ΔV
VΔV K>
12
RH
1 - EField2 - V
States

Exciter IEEEX1
RsT+11 1
1C
B
sTsT
++Σ
SVREFV
+
Exciter IEEEX1 IEEE Type 1 Excitation System Model
Σ+
−+
ERRV 1A
A
KsT+
RMAXV
RMINV
Σ1
EsT
E EK S+
FDE+
−
11F
F
sKsT+
FVRV
Regulator
Damping
−
Model supported by PSSE
CE3 4
5
12
t
B
R
F
1 - EField2 - Sensed V3 - V4 - V5 - V
States

Exciter IEEEX2
Exciter IEEEX2 IEEE Type 2 Excitation System Model IEEEX2
Model supported by PSSE
RsT+11 1
1C
B
sTsT
++Σ
SVREFV
+
Σ+
−
+ERRV 1A
A
KsT+
RMAXV
RMINV
Σ1
EsT
E EK S+
FDE+
−FV
RV
Regulator
Damping
−
CE
( )( )1 21 1F
F F
sKsT sT+ +
3 4
5
12
t
R
F1
F2
1 - EField2 - Sensed V3 - LL4 - V5 - V6 - V
States
6

Exciter IEEEX3
RsT+11
Σ
SVREFV
+
Exciter IEEEX3 IEEE Type 3 Excitation System Model
Σ+
− +
ERRV 1A
A
KsT+
RMAXV
RMINV
Σ1
E EK sT+FDE+
+
1F
F
sKsT+
FV
Regulator
Damping
−
0
THEV P T I TV K V jK I= +TV
TI0
BMAXV
( )22 0.78TH FDV I−THV
FDI
BV
Model supported by PSSE
CE
RV
3
4
12
t
R
F
1 - EField2 - Sensed V3 - V4 - V
States

Exciter IEEEX4
RsT+11
REFV
Exciter IEEEX4 IEEE Type 4 Excitation System Model
Σ+
− ERRV RMAX RMIN
V RH
V VsK T
−
RMAXV
RMINV
If , If , If ,
ERR V R RMAX
ERR V R RH
ERR V R RMIN
V K V VV K V VV K V V
≥ =
< =
≤ − =
RHV
VK−
VK
Σ1
EsT
E EK S+
FDE+
−RV
Model supported by PSSE
CE
3
1
2
t
RH
1 - EField2 - Sensed V3 - V
States

Exciter IEET1A
Σ
REFV
Exciter IEET1A Modified IEEE Type 1 Excitation System Model
Σ+
− +
1A
A
KsT+
RMAXV
RMINV
Σ1
EsT
E EK S+
FDE+
−
1F
F
sKsT+
−
SV
FDMAXE
FDMINE+
Model supported by PSSE
CE
3
12
R
F
1 - EField2 - V3 - V
States

Exciter IEET1B
Σ
MAGI
+
+Σ
1
EsT+ FDE
Exciter IEET1B Modified IEEE Type 1 Excitation System Model
RV
π
ψ
ES
−
EK−
+RsT+1
1
EX
TV Σ
REFV
+SMAXV
SMINV
Σ− +
Bias
SV
Σ+
++
11A
A
KsT+
RMAXV
RMINV
2
11 AsT+ REGV
1
11F
F
sKsT+
−
Switch=0
Switch=1
Model supported by PSSE but not implemented yet in Simulator
CE

Exciter IEET5A
Σ 1A
RH
KsT+
RMAXV
RMINV
REFV
+
− Σ1
E EK sT+
+FDE
Exciter IEET5A Modified IEEE Type 4 Excitation System Model
RV
*
π
ψ
ES
−
Σ
TOV
+
− TΔV
FDMAXE
FDMINE
* If equals zero, block becomes ARH
KTs
Model supported by PSSE
CE
RMAXV
RMINVKV
-KV
VΔV K<
VΔV K>
12
RH
1 - EField2 - V
States

Exciter IEEX2A
RsT+11 1
1C
B
sTsT
++Σ
SVREFV
+
Exciter IEEX2A IEEE Type 2A Excitation System Model
Σ+
−+
ERRV 1A
A
KsT+
RMAXV
RMINV
Σ1
EsT
E EK S+
FDE+
−
11F
F
sKsT+
FVRV−
0
Model supported by PSSE
CE3 4
5
12
t
B
R
F
1 - EField2 - Sensed V3 - V4 - V5 - V
States

Exciter IVOEX
Model supported by PSSE
Exciter IVOEX IVO Excitation Model
+ Ec
Efd 1 2
States: 1 – VLL12 2 – Sensed Vt 3 – VLL34 4 – VLL56
_
VS
3 MIN5
MAX5
MIN1
MAX1
Vref
+
MIN3
MAX3
4

Exciter PLAYINEX With the PLAYINEX model, specify the index (FIndex) of a specified PlayIn structure. That signal will then be played into the model as the field voltage during the simulation.

Exciter REXS
RsT+11
ΣSV
REFV
+
Exciter REXS General Purpose Rotating Excitation System Model
Σ+
−+
ERRV 1A
A
KsT+
RMAXV
RMINV
1
2
11
F
F
sTsT
++
FV
Regulator
−
0
RMIN RMAX FMIN FMAX TERMModel supported by PSLF. If flimf = 1 then multiply V ,V ,V , and V by V .
CE
IMAXV−
IMAXV
1F
F
sKsT+
VIVP
KKs
+ 1 2
1 2
(1 )(1 )(1 )(1 )
C C
B B
sT sTsT sT
+ ++ +
ΣΣ IIIP
KKs
++
RV
11 PsT+
FMAXV
FMINVHK
Σ1
EsT
E EK S+
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
+−
+
+
EV
EXF
FDI
Σ
NI
FDE+
0
Speed
CXTERMI
CMAXV
EFDK
RV
−
+ +
FEI0
1
2
Fbf
34
5
1
2 E
T I
F I
R
1 - V 6 - Voltage PI2 - Sensed V 7 - V LL13 - V 8 - V LL24 - Current PI 9 - Feedback5 - V 10 - Feedback LL
States6
87
10
9

Exciter REXSY1
Exciter REXSY1 General Purpose Rotating Excitation System Model
Model supported by PSSE
RsT+11
Σ
SV
REFV
+
Σ+
−+
11 AsT+
RMAXF V⋅
RMINF V⋅1
2
11
F
F
sTsT
++
FV−
IMAXV−
IMAXV
1F
F
sKsT+
VIVP
KKs
+ 1 2
1 2
(1 )(1 )(1 )(1 )
C C
B B
sT sTsT sT
+ ++ + RV
0
1
2FEI
FDE
0II
IPKKs
+1
1 PsT+
FMAXF V⋅
FMINF V⋅HK
Σ1
EsT
E EK S+
π
( )EX NF f I=
C FDN
E
K IIV
=
−
+
+
EV
EXF
FDI
ΣNI
FDE+
CXTERMI
CMAXV
+
FEI
RV
DK
Σ+
−
[ ]1IMF T E D EF= 1.0 + F (E -1.0) (K +K +S )⋅CE
Exciter Field Current Regulator
Fbf
34
5
1
2
Voltage Regulator
E
T I
F I
R
1 - V 6 - Voltage PI2 - Sensed V 7 - V LL13 - V 8 - V LL24 - Current PI 9 - Feedback5 - V 10 - Feedback LL
States
6
7 8
910

Exciter REXSYS
Exciter REXSYS General Purpose Rotating Excitation System Model
Model supported by PSSE
RsT+11
Σ
SV
REFV
+
Σ+
−+
11 AsT+
RMAXF V⋅
RMINF V⋅1
2
11
F
F
sTsT
++
FV−
IMAXV−
IMAXV
1F
F
sKsT+
VIVP
KKs
+ 1 2
1 2
(1 )(1 )(1 )(1 )
C C
B B
sT sTsT sT
+ ++ + RV
0
1
2FEI
FDE
0II
IPKKs
+1
1 PsT+
FMAXF V⋅
FMINF V⋅HK
Σ1
EsT
E EK S+
π
( )EX NF f I=
C FDN
E
K IIV
=
−
+
+
EV
EXF
FDI
ΣNI
FDE+
+
FEI
RV
DK
Σ+
−
[ ]1IMP T E D EF= 1.0 + F (E -1.0) (K +K +S )⋅CE
Exciter Field Current Regulator
Fbf
34
5
1
2
Voltage Regulator
E
T I
F I
R
1 - V 6 - Voltage PI2 - Sensed V 7 - V LL13 - V 8 - V LL24 - Current PI 9 - Feedback5 - V 10 - Feedback LL
States
6
7 8
910

Exciter SCRX
REFV
Exciter SCRX Bus Fed or Solid Fed Static Excitation System Model
Σ+
−1 E
KsT+
FDMAXE
FDMINE
πFDE1
1A
B
sTsT
++
SV
+
TE 1SWITCHC =0 SWITCHC =1
SWITCH
Model supported by PSLFModel supported by PSSE has C 1=
CE
1 2
E
1 - Lead-Lag2 - V
States

Exciter SEXS_GE
compV
REFV
Exciter SEXS_GE Simplified Excitation System Model
+
−1 E
KsT+
MAXE
MINE
11
A
B
sTsT
++
StabilizerOutput
+
Model supported by PSLF
RsT+11 FDE( )1C C
C
K sTsT+
Σ
FDMINE
FDMAXE34 12
t
1 - EField2 - Sensed V3 - LL4 - PI
States

Exciter SEXS_PTI
CE
REFV
Exciter SEXS_PTI Simplified Excitation System Model
Σ+
−1 E
KsT+
FDMAXE
FDMINE
FDE11
A
B
sTsT
++
SV
+
Model supported by PSSE
12
1 - EField2 - LL
States

Exciter ST5B and ESST5B ST5B is the same as ESST5B. See ESST5B documentation. Exciter ST6B and ESST6B ST6B is the same as ESST6B. See ESST6B documentation. Exciter ST7B and ESST7B ST7B is the same as ESST7B. See ESST7B documentation.

Exciter TEXS
CE
REFV
Exciter TEXS General Purpose Transformer-Fed Excitation System Model
Σ+
−FDE
1G
G
KsT+
SV
+
Model supported by PSLF
11 RsT+
IMAXV−
IMAXVVI
VPKKs
+
1VD
VD
sKsT+
RMAXV
RMINV
Σ++
Σ−
Σ+
+ Σ+
−
FFK
MK
RMINV
RMAXVLVGate π
CX
Σ+−
CLKLRI LRK
0
FDI
1 0
GeneratorTerminal Voltage
ConstantSource Voltage
RV EV+
3
4
1
2
t
1 - Feedback2 - Sensed V3 - Derivative Controller4 - Integral Controller
States

Exciter URST5T
CE
RsT+11
Σ
REFV
−+
Σ
CK
+
+
STBV FDI
FDE
Exciter URST5T IEEE Proposed Type ST5B Excitation System Model
UELV
HVGate
OELV
LVGate Σ
−
1
1
11
C
B
sTsT
++
RMAX RV /K
RMIN RV /K
2
2
11
C
B
sTsT
++
RMAX RV /K
RMIN RV /K
RMAXV
RMINV1
11 sT+
RMAX TV V
RMIN TV V
RK +
Model supported by PSSE
3 4 12
R
t
1 - V2 - Sensed V3 - LL14 - LL2
States

Exciter WT2E
Exciter Model WT2E
Model supported by PSLF
States: 1 – Rexternal 2 – Speed 3 – Pelec
−
+
elecP
MAXR
MINR
Σ
Speed
Power-Slip Curve
1
2
3
p
p
sTK+1
w
w
sTK+1
sK
K ippp +

Exciter WT2E1
−
+
Exciter WT2E1 Rotor Resistance Control Model for Type 2 Wind Generator
elecP
MAXR
MINR
Model supported by PSSE
external
elec
1 - R2 - Speed3 - P
States
11 SPsT+
11 PCsT+
Σ1
PI
KsT
+
Speed
Power-Slip Curve
1
2
3
Note: Power-Slip Curves is defined in the WT2G1 model

Exciter WT3E and WT3E1
Exciter WT3E and WT3E1 Electrical Control for Type 3 Wind Generator
∑
MAX wrat MIN wrat FV C
QCMD QMAX QMIN
WT3E supported by PSLF with RP P and RP -P , T TWT3E1 supported by PSSE uses vltflg to determine the limits on E . When vltflg > 0 Simulator always uses XI and XI .
= = =
+− 1
1 FVsT+
RFQV
11 PsT+
elecP
1
Nf
1PV
V
KsT+
+
∑RsT+1
1
IVKs
MINQ
MAXQ
π
tanFAREFP
REFQ
1
0
1−
Reactive Power Control Model
MINQ
MAXQ
varflg
−elecQ
QIKs
MINV
+−
∑REFV
QVKs
QMAXXI
QMINXI
QCMDE
CV
3
4
5
1 2
ref ORD
qppcmd Meas
PV
regMeas
IV ORD
1 - V 6 - Q2 - E 7 - P
3 - K 8 - PowerFilter4 - V 9 - SpeedPI
5 - K 10 - P
States
6
7
MAXV TERMVvltflg
+
0
0>
20( 20%, )PP ω=
100( 100%, )PP ω=
40( 40%, )PP ω=60( 60%, )PP ω=
( , )MIN PMINP ω
Speed
P
Active Power (Torque) Control Model
elecP1
1 PWRsT+∑ IP
PPKKs
+ π ∑1
FPsT ÷MINRP
MAXRP PMAXIMAXP
MINP
1098
Speed Speed
−
++
−
TERMV
PCMDI
∑
+

Exciter WT4E1
Exciter WT4E1 Electrical Control for Type 4 Wind Generator
∑+
− 11 FVsT+
RFQV
11 PsT+
elecP
1PV
V
KsT+
+
∑1
1 RVsT+
IVKs
MINQ
MAXQ
π
tanFAREFP
10
MINQ
MAXQ
varflg
−elecQ
QIKs
MINCLV
+
−∑ VIK
s
QMAXI
QMINI
QCMDI
CV
MAXCLV
TERMV
+
elecP ∑ ÷PMAXI
−+
+
−
TERMV
PCMDI
∑
+
pfaflg
REFQ
01
ORDP
Converter Current Limitpqflag
∑
−
0.01
11 PWRsT+
IPPP
KKs
+
1F
F
sKsT+
REFP
MINdP
MAXdP
3
4
5
12
6
7
10
98
States: 1 – Vref 6 - Qord 2 - Eqppcmd 7 - Pmeas 3 – Kpv 8 - TPower 4 – VregMeas 9 - Kip 5 – Kiv 10 - Feedback
Model supported by PSSE

Exciter WT4E
Exciter WT4E Electrical Control for Full Converter Wind-turbine generators (FC WTG)
∑+
− 11 FVsT+
RFQV
11 PsT+
elecP
1PV
V
KsT+
+
∑1
1 RVsT+
IVKs
MINQ
MAXQ
π
tanFAREFP
10
MINQ
MAXQ
varflg
−elecQ
QIKs
MINCLV
+
−∑ VIK
s
QMAXI
QMINI
QCMDI
CV
MAXCLV
TERMV
+
÷PMAXI+
TERMV
PCMDI
∑
+
pfaflg
REFQ
01
ORDP
Converter Current Limitpqflag
34
5
12
6
7
States: 1 – Vref 6 - Qord 2 - IqCMD 7 - Pmeas 3 – Kpv 4 – VregMeas 5 – Kiv
WT4T Governor Model ORDP
TERMV
Model supported by PSLF

Generator Other Model COMP
Voltage Regulator Current Compensating Model COMP
Model supported by PSSE
𝑉�𝑇 𝑉𝐶𝑇 = |𝑉�𝑇 − 𝑗 ∙ 𝑋𝑒 ∙ 𝐼�̅�| VCT
𝐼�̅� ECOMP

Generator Other Model COMPCC
Voltage Regulator Current Compensating Model for Cross-Compounds Units COMPCC
Model supported by PSSE
𝐸𝐶𝑂𝑀𝑃1 = 𝑉𝑇 − �𝐼𝑇1 + 𝐼𝑇2
2� ∙ (𝑅1 + 𝑗 ∙ 𝑋1) + 𝐼𝑇1 ∙ (𝑅2 + 𝑗 ∙ 𝑋2)
VT IT1
IT2
𝐸𝐶𝑂𝑀𝑃2 = 𝑉𝑇 − �𝐼𝑇1 + 𝐼𝑇2
2� ∙ (𝑅1 + 𝑗 ∙ 𝑋1) + 𝐼𝑇2 ∙ (𝑅2 + 𝑗 ∙ 𝑋2)

Generator Other Model GP1
Generic Generator Protection System GP1
Model supported by PSLF
Generator Protection
(GP)
Ifd
flag
Excitation System
Notes: = isoc or ifoc*affl a = asoc or afoc k = ksoc or kfoc
Trip Signal Alarm Only
0
1
Field Shunt
VT PT
I CT
GSU
52G
T1
T2
s2 1.05*pick up pick up
𝑇1 =𝑘
1.05 − 𝑎
𝑇2 =𝑘
𝑠2 − 𝑎

Generator Other Model IEEEVC
Voltage Regulator Current Compensating Model IEEEVC
Model supported by PSSE
𝑉�𝑇 𝑉𝐶𝑇 = |𝑉�𝑇 + (𝑅𝐶 + 𝑗 ∙ 𝑋�𝐶) ∙ 𝐼�̅�| VCT
𝐼�̅� ECOMP

Generator Other Model LCFB1
Turbine Load Controller Model LCFB1
mwsetP 1Ks
++
PK
−
+
bFMAXe
MAXe−db
db−
11 PELECsT+
Σ
genP
rmaxL
rmaxL−
rmaxL
rmaxL−
Σ +
+
0refP
Σ refP
Model supported by PSLF
Σ
Frequency Bias Flag - fbf, set to 1 to enable or 0 to disablePower Controller Flag - pbf, set to 1 to enable or 0 to disable
Freq
1.0+
−
−
elec
I
1 - P Sensed2 - K
States
1
2 Kdrp
If Kdrp <= 0, then Kdrp is set to 1.0 for speed reference governors Kdrp = 25.0 for load reference governors

Generator Other Model LCFB1_PTI
Turbine Load Controller Model LCFB1_PTI
mwsetP 1Ks
++
PK
−
+
bFMAXe
MAXe−db
db−
11 PELECsT+
Σ
genP
rmaxL
rmaxL−
rmaxL
rmaxL−
Σ +
+
0refP
Σ refP
Σ
Frequency Bias Flag - fbf, set to 1 to enable or 0 to disablePower Controller Flag - pbf, set to 1 to enable or 0 to disable
Freq
1.0+
−
−
elec
I
1 - P Sensed2 - K
States
1
2
Model supported by PSSE

Generator Other Model LHFRT
Model supported by PSLF
Low/High Frequency Ride through Generator Protection
Fref Frequency ref. in Hz dftrp1 to dftrp10 Delta Frequency Trip Level in p.u. dttrp1 to dttrp10 Delta Frequency Trip Time Level in sec.

Generator Other Model LHVRT
Model supported by PSLF
Low/High Voltage Ride through Generator Protection
Vref Voltage ref. in p.u. dvtrp1 to dftrp10 Delta Voltage Trip Level in p.u. dttrp1 to dttrp10 Delta Voltage Trip Time Level in sec.

Generator Other Model MAXEX1 and MAXEX2
+ -
VLOW
� EFD
Maximum Excitation Limiter Model MAXEX1 and MAXEX2
Model supported by PSSE
KMX 0 V
OEL
EFDDES*EFDRATED
(EFD1, TIME1)
Time (sec.)
EFD (p.u. of Rated)
(EFD2, TIME2) (EFD3, TIME3)

Generator Other Model MNLEX1
+
+ � IREAL
Minimum Excitation Limiter Model MNLEX1
Model supported by PSSE
0
EFD
XADIFD
+ �
VUEL
𝐾𝑀1 + 𝑠𝑇𝑀
𝑠𝐾𝐹2
1 + 𝑠𝑇𝐹2
MELMAX
-
1𝐾
PQSIG

Generator Other Model MNLEX2
+
+ � Q
Minimum Excitation Limiter Model MNLEX2
Model supported by PSSE
0
P
+ � VUEL 𝐾𝑀
1 + 𝑠𝑇𝑀
𝑠𝐾𝐹2
1 + 𝑠𝑇𝐹2
MELMAX
-
PQSIG -
� + X2
X2
𝑄𝑜 ∙ 𝐸𝑇2 (𝑅 ∙ 𝐸𝑇2)2
-
Q
P
Radius Qo

Generator Other Model MNLEX3
+
+ � Qo
(1.0 p.u.)
Minimum Excitation Limiter Model MNLEX3
Model supported by PSSE
0
+ � VUEL 𝐾𝑀
1 + 𝑠𝑇𝑀
𝑠𝐾𝐹2
1 + 𝑠𝑇𝐹2
MELMAX
PQSIG -
� +
B
𝑃𝑉𝑇
+ Q/V
P/V
B = Slope
𝑄
𝑉𝑇
EFD
Qo (1.0 p.u. V)

Generator Other Model OEL1
Over Excitation Limiter for Synchronous Machine Excitation Systems OEL1
Model supported by PSLF
Reference Runback
Voltage Regulator
Voltage Reference
Field Winding
Field Current
Transformer
PT
CT Generator
Overexcitation Limiter

Generator Other Model PLAYINREF With the PLAYINREF model, specify the indices (Vref_Index and Pref_Index) of a specified PlayIn structure. Those signals will then be played into the model as either Pref of the Governor models or Vref of the Exciter models.

Generator Other Model REMCMP
Voltage Regulator Current Compensating Model REMCMP
Model supported by PSSE
Remote bus Remote bus number

Governor BPA GG
Governor BPA GG WSCC Type G Governor Model
Model in the public domain, available from BPA
mech1 - P2 - Lead-Lag 13 - Integrator 34 - Integrator 4
States
'1KΔω 2
1
11
sTsT
++ Σ
+
−
MOP
MAXP+
−3
11 sT+ 4
11 sT+
5
5
11
sFTsT
++
MPM eP -P
eP
Σ2 3 4 1

Governor BPA GH
Governor BPA GH WSCC Type H Hydro-Mechanical Governor Turbine Model
Model in the public domain, available from BPA
1(1 )G PT sT+
UPP
−−
1s /2
11
W
W
sTsT−+
'1KΔω
DOWNP
0P XRMAX(P.U.)P
MINP =0
R
Σ+
+
1d d
d
SD TsT+
Σ+
PILOT VALVE GATE SERVO TURBINE
MP23
4
1
mech1 - P2 - P gate valve3 - y34 - Feedback
States

Governor BPA GIGATB, BPA GJGATB, BPA GKGATB, and BPA GLTB
Governor BPA GIGATB, BPA GJGATB, BPA GKGATB, and BPA GLTB
No block diagrams have been created

Governor BPA GSTA
Governor BPA GSTA WSCC Type S Steam System Governor
And Nonreheat Turbine (Type A) Model
Model in the public domain, available from BPA
−−
1s
1KΔω
0PMAX(P.U.)P
MIN(P.U.)P
+GVP
2
1
11
sTsT
++ 3
1T
UPP
DOWNP
Σ1
1 CHsT+MP23 1
mech1 - P2 - P gate valve3 - Lead-lag
States

Governor BPA GSTB
Governor BPA GSTB WSCC Type S Steam System Governor and Tandem Compound
Single Reheat Turbine (Type B) Model
Model in the public domain, available from BPA
−−
1s
1KΔω
0PMAX(P.U.)P
MIN(P.U.)P
+
GVP2
1
11
sTsT
++ 3
1T
UPP
DOWNP
Σ
MP
11 CHsT+
11 RHsT+
11 COsT+
HPF IPF LPF
++
++
ΣΣ
2
3 4 5
1
1 - P gate valve2 - Lead-lag3 - y34 - y45 - y5
States

Governor BPA GSTC
Governor BPA GSTC WSCC Type S Steam System Governor and Tandem Compound
Double Reheat Turbine (Type C) Model
Model in the public domain, available from BPA
−−
1s
1KΔω
0PMAX(P.U.)P
MIN(P.U.)P
+
GVP2
1
11
sTsT
++ 3
1T
UPP
DOWNP
Σ
MP
11 CHsT+ 1
11 RHsT+ 2
11 RHsT+
VHPF HPF IPF
++
++
Σ
11 COsT+
LPF
++
Σ Σ
2
3 4 5 6
1
1 - P gate valve2 - Lead-lag3 - y34 - y45 - y56 - y6
States

Governor BPA GWTW
Governor BPA GWTW WSCC Type W Hydro Governor System
And Hydro Turbine (Type W) Model
Model in the public domain, available from BPA
−
KΔω
0P
+GVP
2
1 3
1(1 )(1 )
sTsT sT+
+ +
MAX/100P
MIN/100P
Σ1
1 0.5W
W
sTsT
−+
MP
2 3
1
mech1 - P2 - y03 - y1
States

Governor CCBT1
Governor CCBT1 Steam Plant Boiler/Turbine and Governor Model
MIN4
Σ
Model supported by PSLFProportional-integral blocks 1-6 also have rate limits not shown in the block diagram
Σ
11 WsT+
1
DsT
11 FsT+
11
IP
KKs
+
77
71D
PD
sKKsT
++
Σ
44
IP
KKs
+
Σ
Σ
33
IP
KKs
+
Σ1 r
rpelec
rvalve
ΣBK
-dbd
+dbd Σ
MAX4
MIN3
MAX3
Σ
MIN7
MAX7
Σ
MIN2
22
IP
KKs
+
MAX2
MIN5
55
IP
KKs
+
MAX5
1.0
MIN6
66
IP
KKs
+
MAX6
MIN1
MAX1
Σ
π
πPK
π
1 ah−
ah
1
RHsT
1PLM
PLM
KsT+
Σ
Σ
11 GsT+
IGOVPGOV
KKs
+
MINV
MAXV
Σ Σ
11 PelecsT+
-1
0
refω Speed
1.0
Speed
mechP
Valve Bias
mechP
refL
Bias
refPresslmref refP •Press
genP
Σ
+
−
−
−
++
−
− −
−−
−
−
−
−−
−−
+
+
+
+
++
++
++
+
++
++
2
3
4
5
6
1
7
8 9
10
11
12
+
13
14 1550PLMT =
Σ

Governor CRCMGV
(HP)Speed ( )
1( )
1/1
HP
HP
RsT+ Σ
+
mech(HP)P
Governor CRCMGV Cross Compound Turbine-Governor Model
( )( )( )( ) 5( )
3( ) 4( ) 5( )
11 1 1
HP HP
HP HP HP
sF TsT sT sT
+
+ + +−
Reference
MAX(HP)P
0
+
( )
1( )
1/1
LP
LP
RsT+ Σ
+
( )( )( )( ) 5( )
3( ) 4( ) 5( )
11 1 1
LP LP
LP LP LP
sF TsT sT sT
+
+ + +−
ReferenceMAX(LP)P
0
+
( )( )2( )H HP T HPD E −
Σ−
+
( )( )2( )H LP T HPD E −−
Σ−
(LP)SpeedΣ
High-Pressure Unit
Low-Pressure Unit
mech(LP)P−
Model supported by PSLF and PSSE
2 3 4
5
6
1
1 - HPInput2 - HPState13 - HPState24 - HPState35 - LPInput6 - LPState17 - LPState28 - LPState3
States
7 8

Governor DEGOV
Governor DEGOV Woodward Diesel Governor Model
( )( )( )
4
5 6
11 1
Actuator
K sTs sT sT
++ +
MAXT
MINT
π( )32
1 2 1
11
Electric Control Box
sTsT s T T− ++ +
1+Speed
Engine
DsTe−mechP
Model supported by PSSE
2
3 4 5
1
1 - Control box 12 - Control box 23 - Actuator 14 - Actuator 25 - Actuator 3
States
ΔωSpeed

Governor DEGOV1
Governor DEGOV1 Woodward Diesel Governor Model
( )( )( )
4
5 6
11 1
Actuator
K sTs sT sT
++ +
MAXT
MINT
πΔωSpeed
1+Speed
Engine
DsTe−mechP( )3
21 2 1
11
Electric Control Box
sTsT s T T− ++ +
+
−
11 EsT+
SBASEMBASE
elecPDROOP
Σ−
refP
1
0
Model supported by PSSE
6
Droop Control
1 - Control box 12 - Control box 23 - Actuator 14 - Actuator 25 - Actuator 36 - Droop Input
States
21
3 4 5

Governor G2WSCC
Governor G2WSCC Double Derivative Hydro Governor and Turbine
Represents WECC G2 Governor Plus Turbine Model
GVN
Δω(Speed) eps
1db
11 DsT+
1
1 F
sKsT+
22
2(1 )F
s KsT+
+
+
+
R1
1 TsT+elecP
1G
P
KsT+
OPENVEL
CLOSEVEL
1s
MAXP
MINP
2db
GV 11
turb turb
turb turb
sA TsB T
++
GVPmechP
+−
Σ
T(T =0)
refP
Model supported by PSLF
+−Σ IK
s−
Σ2 3
4 5
6
1
mech
D
1
2
2
elec
1 - P2 - T3 - K4 - K first5 - K second6 - Integrator7 - P Sensed8 - Valve9 - Gate
States
8 9
7
GV1, PGV1...GV6, PGV6 are the x,y coordinates of blockGVN

Governor GAST_GE
Governor GAST_GE Gas Turbine-Governor Model
refP ( )4
5
11
AK sTsT+
+
+
+
+
Model supported by PSLF
+
−
2
2
11
AsTBsT
++
−
eps
0db
Δω(Speed)
3
11 sT+
1
1sT
MAXV
MINV
LIMR
1R
Σ
IDLEF
TK
Σ
ΣIDLEF
MAXL
Σ +−
VG
GVP dbb
mechP
11 LTRsT+
+
−
V INC LIM TRAT
LIM MAX
if (D >L ) R =L else R =R Σ
VD
Σ
−
2
3
4
5
1 LVGATE
1 - Input LL2 - Integrator3 - Governor LL4 - Load Limit5 - Temperature
States
GV1, PGV1...GV6, PGV6 are the x,y coordinates of vs. blockGVP GV

Governor GAST_PTI
Governor GAST_PTI Gas Turbine-Governor Model
MAXV
refLoad mechP−
+
turbD
−
1R
Σ
MINV
1
11 sT+ 2
11 sT+
LVGate Σ+
Speed
3
11 sT+TK+ −
+
ΣΣ+
TA (Load Limit)
Model supported by PSSE
2
3
1
1 - Fuel Valve2 - Fuel Flow3 - Exhaust Temperature
States

Governor GAST2A
Governor GAST2A Gas Turbine-Governor Model
LowValueSelect
( )1W sXsY Z
++
+Σ−
ReferencesTe−
MAX
MINSpeed
GovernorSpeed
Control
3K +
FuelControl
AC sB+
11 Fsτ+
CRsEe−
FK
6K
Σ+
−
ValvePositioner
FuelSystem fW
FuelFlow
TDsEe−
51
T
sTsτ+
MAX
+
4
11 sT+
54
31KK
sT+
+ 1fΣ −TurbineExhaust
Turbine
RadiationShieldThermocouple
TemperatureControl*
CT
11 CDsT+
2fMBASERATET
+
Δω
1.0 +
π
Σ
π
mechP
( )1 R f1 f1f1f =T -A 1.0-w -B Speed
( ) ( )f22 f2 f2 f2f =A -B w -C Speed
f2wTurbine
Gas TurbineDynamics
* Temperature control output is set to output of speed governor when temperature control input changes from positive to negative
Model supported by PSSE
2 3
45
7
1
f1w
1 - Speed Governor2 - Valve Positioner3 - Fuel System4 - Radiation Shield5 - Thermocouple6 - Temp Control7 - Turbine Dynamics
States
6

Governor GASTWD
Governor GASTWD Woodward Gas Turbine-Governor Model
LowValueSelect+
−
SpeedReference
sTe−
MAX
MIN
SpeedControl
3K +
FuelControl
AC sB+
11 Fsτ+
CRsEe−
FK
6K
Σ+
−
ValvePositioner
FuelSystem
fWFuelFlow
TDsEe−
5 1
T
sTsτ+
MAX
+ 4
11 sT+
54
31KK
sT+
+ 1fΣ −TurbineExhaust
Turbine
RadiationShieldThermocouple
TemperatureControl*
11 CDsT+
2fMBASERATET
+
Δω
1.0 +
π
Σ
π
mechP
( ) ( )f =T -A 1.0-w -B Speed1 R f1 f1 f1 ( ) ( )f =A -B w -C Speed2 f2 f2 f2 f2
f2wTurbineGas TurbineDynamics
* Temperature control output is set to output of speed governor when temperature control input changes from positive to negative
IKs
PK
DsK
+
Σ++
SBASE
RATET
1DROOP
D
KsT+
Σ
elecP
eP
−
T Setpoint for CTemperature Control
Model supported by PSSE
2 3
45
6
1
f1w
1 - Power Transducer2 - Valve Positioner3 - Fuel System4 - Radiation Shield5 - Thermocouple6 - Temp Control7 - Turbine Dynamics8 - PID 1 9 - PID 2
States
78 9

Governor GGOV1
Governor GGOV1 – GE General Governor-Turbine Model
( / )dref turb fnlL K w+ +1
1 FloadsT+11
SA
SB
sTsT
++
mD**Dmm <If D 0, (Speed+1)m >If D 0, (Speed)
−
11
C
B
sTsT
++
engsTe−
turbK
Σ
PloadK
IloadKs
Σ
Σ
−
++
+
1.0
AK t∆ +
+ΣΣ
+
1 A
ssT+
−
drefL mechP
Speed
PgovK
IgovKs
1Dgov
Dgov
sKsT+
+
++
−+
maxerr
minerr
-dbdb
++
π
11 ACTsT+
MAXV
MINV
refPΣ
LowValueSelect
r
Σ
IMWKs
Σ
Σ+ −
11 PelecsT+
elecP
−Σ
fnlw
π
1.0 (Speed+1)governor outputvalve stroke
aset
−
IMW
UP DOWN CLOSE OPEN
Model supported by PSLFModel supported by PSSE does not include non-windup limits on K blockR , R , R , and R inputs not implemented in Simulator
+
2
3
4
5
6
1
Flag0 1
Rselect
11−
2−
mwsetP
1.1r
-1.1r
Timestep
elec1 - P Measured 5 - Turbine LL2 - Governor Differential Control 6 - Turbine Load Limiter3 - Governor Integral Control 7 - Turbine Load Integral Control4 - Turbine Actuator 8 - Supervisory Load Co
States
ntrol9 - Accel Control10 - Temp Detection LL
7
8
9
10
MINV
MAXV

Governor GGOV2
Governor GGOV2 - GE General Governor-Turbine Model
mwsetP
( / )dref turb fnlL K w+ +1
1 floadsT+11
sa
sb
sTsT
++
mD−
11
c
b
sTsT
++
engsTe−
turbK
Σ
ploadK
iloadKs
Σ
Σ
−
++
+
1.0
aK t∆
5s 9s
6s
+
+ΣΣ
+
1 a
ssT+
8s
4s
−
drefL MECHP
Speed
pgovK
igovKs
1dgov
dgov
sKsT+
+2s+
+
−
1s
+
++
π
11 actsT+
ropenvmax
vminrclose
refPΣ
LowValueSelect
r
Σ
imwKs
Σ
Σ+ −
11 PelecsT+
ELECP
7s
0s
−Σ
fnlw3s
π
1.0
aset
−
+
MINV
MAXV
Frequency-dependent
limit
Speed
fsrt
fsra
fsrn1.1r
-1.1r
Flag0 1
Timestep
**Dmm <If D 0, (Speed+1)m >If D 0, (Speed)
(Speed+1)
Rselect
11−
2−governor output
valve stroke
maxerr
minerr
-dbdb
Model supported by PSLF
8
7
10
2
3
4
5
6
1
elec1 - P Measured 5 - Turbine LL2 - Governor Differential Control 6 - Turbine Load Limiter3 - Governor Integral Control 7 - Turbine Load Integral Control4 - Turbine Actuator 8 - Supervisory Load Co
States
ntrol9 - Accel Control10 - Temp Detection LL
9

Governor GGOV3
11
cd
bd
sTsT
++
Governor GGOV3 - GE General Governor-Turbine Model
mwsetP
( / )dref turb fnlL K w+ +1
1 floadsT+11
sa
sb
sTsT
++
mD −
11
c
b
sTsT
++
engsTe−
Σ
ploadK
iloadKs
Σ
Σ
−
+
+
+
1.0
aK t∆ +
+ΣΣ
+
1 a
ssT+
−
drefL MECHP
PercievedSpeed
pgovK
igovKs
1dgov
dgov
sKsT+
++
+
−+
++
π
11 actsT+
refPΣ
LowValueSelect
R
Σ
imwKs
Σ
Σ+ −
11 PelecsT+
ELECP
−
fnlw
π
1.0
aset
−
+
Σ
turbK
2
3 4
56
1
7
8
9
10
11
**Dmm <If D 0, (Speed+1)m >If D 0, (Speed)
1.1r
-1.1r
Flag0 1
Timestep
MAXV
MINV
UP DOWN CLOSE OPEN dnrate, R , R , R , and R inputs not implemented in Simulator
Rselect
11−
2−(Speed+1)governor output
valve stroke
MINV
MAXV
elec1 - P Measured 5 - Turbine LL 9 - Accel Control2 - Governor Differential Control 6 - Turbine Load Limiter 10 - Temp Detection LL3 - Governor Integral Control 7 - Turbine Load Integral Contro
States
l 11 - Fuel System Lead Lag4 - Turbine Actuator 8 - Supervisory Load Control
Maxerr
Minerr
-dbdb
Model supported by PSLF

Governor GGOV3 - GE General Governor-Turbine Model
dnlo
PercievedSpeed
dnhi
ffa
ffb
slope = 1
slope = ffc
MeasuredSpeed
Nonlinear Speed Filter
FilteredSpeed
Rate limit dnrate not used in SimulatorModel supported by PSLF

Governor GPWSCC
Governor GPWSCC PID Governor-Turbine Model
GVN
err
1db
11 DsT+
1Ks
1D
f
sKsT+
+
+
+
R 11 tsT+
( 0)tT >
1G
P
KsT+
1s 2db
GV 11
turb turb
turb turb
sA TsB T
++
+ −
Σ
PK
Σ+
−
− CVΣ
GVP
0tT =
176
5
3
4
2
mechP
elecP
Δω(Speed)
refP
OPENVEL
CLOSEVEL
MAXP
MINP
GV1, PGV1...GV6, PGV6 are the x,y coordinates of blockGVN
mech elec
D
1 - P 5 - P Sensed2 - T 6 - Valve3 - Integrator 7 - Gate4 - Derivative
States
Model supported by PSLF

Governor HYG3
Governor HYG3 PID Governor, Double Derivative Governor, and Turbine
Δω1db
11 DsT+
IKs
1
1 f
sKsT+
+
+
+
11 tsT+
1G
P
KsT+
1s
MAXP
MINP
2dbGV
+−
2K
Σ+
−
−
gateR
−
1db
11 DsT+
1
1 f
sKsT+
( )2
22
1 f
s K
sT+
+
+
elecR1
1 tsT+
++
Σ IKs
Σ
−
−−
gateR
Δω (speed-1)pu=
Δω
cflag>0
Σcflag<0
GVN GVP 1
WsT0H
π tA Σ
turbD
GVq/PqNL
Σ÷ πΣ+
− +
−
+−
H q
ΔωπΣ
GVPmechP
refP
refP
elecP
CV
CV
1
2
4 5
7
6
3
8
9
1
7
2
OPENVEL
CLOSEVEL
Model supported by PSLF
elecR
Note: cflag determines numbering of states
D
1
i
W
elec
2
2
1 - T2 - K3 - K4 - Valve5 - Gate6 - T7 - P Sensed8 - K First9 - K Second
States
elecP
3
GV1, PGV1...GV6, PGV6 are the x,y coordinates of blockGVN
GV

Governor HYGOV
Governor HYGOV Hydro Turbine-Governor Model
+1
1 fsT+−
R
1 r
r
sTrT s+ 1
1 gsT+
turbD
−
tA Σ
πg
+−
2db
GVP GV
11
n
np
sTsT
++
MAXG
MING
elmrate limit - V
1db
refP
1 2 3
GVN
GV
Δω
Δω
mechP1
WsTHdam=1
πqNL
Σ÷ πΣ+
− +
−
H 4GVP
GVq/P
Model supported by PSSE and PSLFRperm shown as R, Rtemp shown as r
Ttur, Tn, Tnp, db1, Eps, db2, Bgv0...Bgv5, Bmax, Tblade not implemented in SimulatorGV0, PGV0...GV5, PGV5 are the x,y coordinates of blockGVN
1 - Filter Output2 - Desired Gate3 - Gate4 - Turbine Flow
States

Governor HYGOV2
Governor HYGOV2 Hydro Turbine-Governor Model
MAXP
GMAXV
GMAX-V
−
−
+I PK sK
s+
1
3
1A
sTKsT
+
2
4
11
sTsT
++
1s
R 1temp R
R
sR TsT+
5
6
11
sTsT
−+
Σ −
1 2 3
4
5
6
1 - Filter Output2 - Governor3 - Governor Speed4 - Droop5 - Gate6 - Penstock
States
MING
mechP
refP
Model supported by PSSEMAX MINThe G G limit is modeled as non-windup in PSSE but as a windup limit in Simulator.
MAXGΔωSpeed

Governor HYGOV4
GVN
GVP
GV
Governor HYGOV4 Hydro Turbine-Governor Model
+ 11 psT+
−
1
gT1s
+
+−
1dbΔω ΣCU
OU
2db
permR+
1r temp
r
sT RT s+
Σ
−
turbD
Σ
π
tA
Model supported by PSLF
mechP
refP MAXP
MINP
GV
1
WsTHdam
πqNL
Σ÷ πΣ+
− +
−
H 4
GVP GVq/P
q
3
21
GV0, PGV0...GV5, PGV5 are the x,y coordinates of blockGVN
W
1 - Velocity2 - Gate3 - Rtemp4 - T
States
Bgv0...Bgv5, Bmax, Tblade not implemented in Simulator

Governor HYGOVR
Fourth Order Lead-lag Governor and Hydro Turbine Model HYGOVR
Model supported by PSLF
+ Pmech
Velcl
db2
-
H0
Velop
+
-
+
At
R
-
π π
Δω CV
qn1
gmin
gmax Pref
-
Pelec
Pmax
Pmin
db1
GV
-
+
+
-
Δω
GV Pgv
q/Pgv
H q
Dturb
π
CV 87
10
2 3 4 5 6
1
9
States: 1 – Input Speed 5 – LL78 9 – Flow 2 – LL12 6 – Governor 10 – Pelec 3 – LL34 7 – Velocity 4 – LL56 8 – Gate

Governor HYPID
Model supported by PSLF
Governor HYPID Hydro Turbine and Governor
+
_
b
Pref
Pelec gmin
2
States: 1 – Ki 2 – RPelec 3 – Gate 4 – Turbine Flow 5 – Derivative 6 - Blade
_
qnl
3
At +
R
|ds2/dt|<velm
+
_
gmax
Telec > 0
Telec < 0
Dturb
+
_
+
_
hdam Pv = f(g,b)
g Pmech
speed
speed
1
4
6
5

Governor HYST1
Governor HYST1 Hydro Turbine with Woodward Electro-Hydraulic PID Governor,
Surge Tank, and Inlet Tunnel
− ip
KKs
+Σ+
11 asT+
1d
a
sKsT+
Σ+
+
11 asT+
1perm
reg
RsT+
Σ +
−
11 bsT+
MAXG
MING
( )G s +
turbD
Σ−
GVP
GV
refP
genP
Δω
mechP
4
3
21
5
6
9
7
8
Model supported by PSLFNot yet implemented in Simulator

Governor IEEEG1 and IEEEG1_GE
Governor IEEEG1 and IEEEG1_GE IEEE Type 1 Speed-Governor Model
−
−
HPΔω
SPEED
4
11 sT+
2
1
(1 )1
K sTsT++ 3
1T
CU
OU1s
MAXP
MINP
Σ
1K
5
11 sT+
3K
6
11 sT+
5K
7
11 sT+
7K
Σ Σ
2K 4K 6K 8K
Σ Σ
Σ
Σ
HPPMECH
LPPMECH
+
+
+
+
+
+
+
++
++
+
M1P
M2P
+ GVP
GV
1db
2db
3 4 5
12
1 - Governor Output2 - Lead-Lag3 - Turbine Bowl4 - Reheater5 - Crossover6 - Double Reheat
States
6refP
IEEEG1_GE is supported by PSLF. PowerWorld ignores the db2 term. All values are specified on the turbine rating which is a parameter in PowerWorld and PSLF. If the turbine rating is omitted or zero, then the generator MVABase is used. If there are two generators, then the SUM of the two MVABases is used.
IEEEG1 is supported by PSSE. PSSE does not include the db2, db1, non-linear gain term, or turbine rating. For the IEEEG1 model, if the turbine rating is omited then the MVABase of only the high-pressure generator is used.
GV1, PGV1...GV6, PGV6 are the x,y coordinates of vs. blockGVP GV

Governor IEEEG2
Governor IEEEG2 IEEE Type 2 Speed-Governor Model
− 4
4
11 0.5
sTsT
−+
2
1 3
(1 )(1 )(1 )
K sTsT sT
++ +
MAXP
MINP
Σ+
Model supported by PSSE
3
2 1
refP
mechP
mech1 - P2 - First Integrator3 - Second Integrator
States
ΔωSpeed

Governor IEEEG3_GE
Governor IEEEG3_GE IEEE Type 3 Speed-Governor Model IEEEG3
−
−
( )11
TURB TURB W
TURB W
K A sTB sT+
+
REFP
11 PsT+
1s
MAXP
MINP
+
1TEMP R
R
R sTsT+
+
+Σ
ΣCU
OU1
GT
GVP
GV
1db2db
GV GVP
Model supported by PSLF
32
1
mechP
PERMR
4
mech1 - P2 - Servomotor position3 - Gate position4 - Transient droop
States
PSLF model includes db1, db2, and Eps read but not implemented in Simulator
ΔωSpeed

Governor IEEEG3_PTI
Governor_IEEEG3_PTI IEEE Type 3 Speed-Governor Model IEEEG3
−
−
13 2123 11
23
11
1
1
W
W
a aa a sTa
a sT
+ − +
1(1 )G PT sT+
1s
MAXP
MINP
+
OU
CU
PERMR
1TEMP R
R
R sTsT+
+
+Σ
Σ
Model supported by PSSE
REFP
mechP32 1
4
mech1 - P2 - Servomotor position3 - Gate position4 - Transient droop
States
ΔωSpeed

Governor IEESGO
Governor IEESGO IEEE Standard Model IEEESGO
−Speed4
11 sT+
OP
1 2
1 3
(1 )(1 )(1 )
K sTsT sT
++ +
MAXP
MINPΣ+
21 K−
21 K−
3
61KsT+
2
51K
sT+
Σ+
+ +
3
2
1
4 5
mechP
1 - First Integrator2 - Second Integrator3 - Turbine T44 - Turbine T55 - Turbine T6
States
Model supported by PSSE

Governor PIDGOV
Governor PIDGOV - Hydro Turbine and Governor Model PIDGOV
− ip
KKs
+Σ+
11 asT+
1d
a
sKsT+
Σ+
+
11 asT+
1perm
reg
RsT+
SBASEMBASE
Σ +
−
0
1
1
bT1s
MAXG
MING
MAXVel
MINVelGate
Power
12
3
11 2
Z
Z
sTsT−+
+
( )Z tw wT = A *T
turbD
Σ−
+
−Σ
Feedback signal
Model supported by PSSEModel supported by PSLF
3
2
1
4
5
6
7 mechP
REFP
elecP
(G0,0), (G1,P1), (G2,P2), (1,P3) are x,y coordinates of Power vs. Gate function
1 - Mechanical Output2 - Measured Delta P3 - PI4 - Reg15 - Derivative6 - Reg27 - Gate
States
ΔωSpeed

Governor PLAYINGOV With the PLAYINGOV model, specify the index (FIndex) of a specified PlayIn structure. That signal will then be played into the model as the mechanical power (Pmech) during the simulation.

Governor SHAF25
25 Masses Torsional Shaft Governor Model SHAF25
Model supported by PSSE
State # State number containing delta speed Var # Variable number containing electrical torque Xd - Xdp Xd - X'd Tdop T'do Exciter # Exciter number Gen # Generator number H 1 to H 25 H of mass 1 to H of mass 25 PF 1 to PF 25 Power fraction of 1 to power fraction of 25 D 1 to D 25 D of mass 1 to D of mass 25 K 1-2 to K 24-25 K shaft mass 1-2 to K shaft 25-25

Governor TGOV1
Governor TGOV1 Steam Turbine-Governor Model TGOV1
1
11 sT+
MAXV
MINV
1R+
tD
−
2
3
11
sTsT
++
+
−Σ ΣREFP mechP2 1
1 - Turbine Power2 - Valve Position
States
Model supported by PSSEModel supported by PSLF
ΔωSpeed

Governor TGOV2
Governor TGOV2 Steam Turbine-Governor with Fast Valving Model TGOV2
1
11 sT+
MAXV
MINV
Reference MECHP1R+
tD
− 3
11
KsT−+
+
−Σ 1 t
vsT+
K
Σ+
I
A A
B B
T : Time to initiate fast valving.
T : Intercept valve, , fully closed T seconds after fast valving initiation.
T : Intercept valve starts to reopen T seconds after fast va
v
C C
lving initiation.
T : Intercept valve again fully open T seconds after fast valving initiation.
ΔωSpeed
Model supported by PSSE
321
4
CT
BT
AT
IT ( )I AT T+ ( )I BT T+ ( )I CT T+
Time, seconds
1.
0.
Inte
rcep
t Val
ve P
ositi
on
1 - Throttle2 - Reheat Pressure3 - Reheat Power4 - Intercept Valve
States

Governor TGOV3
RMAXP
Governor TGOV3 Modified IEEE Type 1 Speed-Governor with Fast Valving Model
−
−4
11 sT+
REFP
2
1
(1 )1
K sTsT++ 3
1T
CU
OU1sΣ
1K 2K
6
11 sT+
3K
Σ+
+
+
+
+
Σ
MAXP
MINP5
1sT
+ vΣ−
I
A A
B B
T : Time to initiate fast valving.
T : Intercept valve, , fully closed T seconds after fast valving initiation.
T : Intercept valve starts to reopen T seconds after fast va
v
C C
lving initiation.
T : Intercept valve again fully open T seconds after fast valving initiation.
CT
BT
AT
IT ( )I AT T+ ( )I BT T+ ( )I CT T+
Time, seconds
1.
0.
Inte
rcep
t Val
ve P
ositi
on
MECHP
Model supported by PSLFModel supported by PSSE
0 0.3
0.8
Intercept Valve Position
Flow
321
4 56
1 - LL2 - StateT33 - StateT44 - StateT55 - StateT66 - Intercept Valve
States
Gv1,Pgv1 ... Gv6, Pgv6 are x,y coordinates of Flow vs. Intercept Valve Position function
ΔωSpeed

Governor TGOV5
Governor_TGOV5 - IEEE Type 1 Speed-Governor Model Modified to Include Boiler Controls
−
+HPSPEED
ω∆4
11 sT+
OP
2
1
(1 )1
K sTsT++ 3
1T
CU
OU1s
MAXV
MINV
1K
5
11 sT+
3K
6
11 sT+
5K
7
11 sT+
7K
Σ Σ
2K 4K 6K 8K
Σ Σ
Σ
Σ
HPPMECH
LPPMECH
+
+
+
+
+
+
++
++
++
1MP
2MP
−sm
1MW
MW
KsT+ELECP
−
−
B
f∆
14K1s
−
MINR
MAXRMAXL
MINL
Σ +++
−
Σ
OPLK
ΣΣMWDemand
DesiredMW2C Σ
+
12K
+
13K
Σ
3C
+
+
SPP DPE−DPE
Dead Band
EP(Pressure Error)
π
( )( )( )1
1 11
I I R
R
K sT sTs sT+ +
+
MAXC
EP
π
Fuel Dynamics
Σ+
−
++
1
BsC
−+
Σ11K
10K
Σ
TP
DP 9K
1CΣ
Σ− +
−
+ +
πOP
π
sm
sm
SPP
π
DesiredMW
MINC
Model supported by PSSE
TP

Governor_TGOV5 - IEEE Type 1 Speed-Governor Model Modified to Include Boiler Controls
Model supported by PSSE
States: 1 – Governor Output 2 – Speed Lead-Lag 3 – Turbine Bowl 4 – Reheater 5 – Crossover 6 – Double Reheat 7 – PELEC 8 – PO 9 – FuelDyn1 10 – FuelDyn2 11 – Controller1 12 – Controller2 13 – PD 14 – Delay1 15 – Delay2 16 – Delay3 17 – Delay4

Governor URGS3T
Governor URGS3T WECC Gas Turbine Model
GV
GVP
2db1
1sT
refP err
1db+
−
+4
5
(1 )1aK sT
sT+
+LVGATE
+
MAXV
MINV
2
2
11
AsTBsT
++
LIMR
+ mechP
TK3
11 sT+ΣΣIDLEF
MAXL
++ −
+
−
turbD
ΣΣ
IDLEF−
1R
Σ
Speed
−
11 LTRsT+
+Σ−
V INC LIM TRAT
LIM MAX
If (D >L ), then R = L else, R = R
Σ
VD
Model supported by PSSE
2
3
4
5
1
1 - Input LL2 - Integrator3 - Governor LL4 - Load Limit5 - Temperature
States
−
GV1, PGV1...GV5, PGV5 are the x,y coordinates of vs. blockGVP GV

Governor W2301
Governor W2301 Woodward 2301 Governor and Basic Turbine Model
Speed
11 VsT+Valve Servo
+ Σ−
−GammaΣ
+
1 2Beta s+ ⋅
Σ+
−
11 psT+
1 0.5(1.05 )
Rho sBeta s Alpha
+ ⋅⋅ −
SpeedRef
+ Σ
gnl
−Turbine
PIController
+
mechP3
21
4
1 - PelecSensed2 - PI3 - Valve4 - Turbine
States
D
11
t turb
turb
sK TsT
++
refP
Model supported by PSLFGain, Velamx read but not implemented in Simulator.
Gmax
Gmin
elecP

Governor WEHGOV
Governor WEHGOV Woodward Electric Hydro Governor Model
0 (Speed deadband)( ) (Speed deadband) (Speed deadband)( ) (Speed deadband) (Speed deadband)
Out if ERROut ERR I if ERROut ERR I if ERR
= <= − >= + < −
Governor and Hydraulic Actuators
Model supported by PSSE
(*)
(*)
1
WsT0H =1
π÷ πΣ+
−H 4
ssq/q
Turbine Flow, qFlow
mssPGate position, g
Gate
Flow
ss
Steady-StateFlow, q mssP
+
−Σ mechP
g πturbDSpeed
−
IKs
Gmin-DICN
6
Gmax+DICN
Σ++
+
PKERR
Speed deadband
Σ Σ 1
DVsT11
1 PsT+
Gmin-DPV
Gmax+DPVPilot Valve
1D
D
sKsT+
Feedbacksignal=1 Feedback
signal=0
+
−
gGTMXCL*T
gGTMXOP*T
2
Gate position, g1s
3
Gmax
Gmin
1
gT1 PE
RpermPEsT+
7
−
Distribution Valve
RpermGate
0
Feedbacksignal
SBASEMBASE
elecP
Turbine Dynamics
5
1 - Pilot Valve2 - DistributionValve3 - Gate4 - Turbine Flow5 - Derivative6 - Integrator7 - PelecSensed
States
(Gate 1, Flow G1)...(Gate 5, Flow G5) are x,y coordinates of Flow vs. Gate function(Flow P1, PMECH 1)...(Flow P10, PMECH 10) are x,y coordinates of Pmss vs. Flow function
+−
1−10
refP

Governor WESGOV
Governor WESGOV Westinghouse Digital Governor for Gas Turbine Model
*
Droop
ΔωSpeed
PK
+1
IsT ( )( )1 2
11 1sT sT+ +Σ+
11 pesT+
**
+
−
Σ
Reference
−
Digital Control***
lim
*Sample hold with sample period defined by Delta TC.**Sample hold with sample period defined by Delta TP.
***Maximum change is limited to A between sampling times
.
mechP
elecP
32
1
4
1 - PEMeas2 - Control3 - Valve4 - PMech
States
Model supported by PSSElimA read but not implemented in Simulator

Governor WNDTGE
Governor WNDTGE Wind Turbine and Turbine Control Model for GE Wind Turbines
Model supported by PSLF
++
−
11 psT+
11 5s+
+
RotorModel
Over/UnderSpeed Trip
TripSignalω
rotorω
/pp ipK K s+
20.67 1.42 0.51elec elecP P− + +refω
cmdθ
WindPowerModel
BladePitch
θ
Σ
/ptrq itrqK K s+1
1 pcsT+π
ω
ordP
+
−/pc icK K s+ Σ
Σ
ω
Power ResponseRate Limit
Apcflg is set to zero. Limits on states 2 and 3 and trip signal are not implemented.
Anti-windup onPitch Limits
mechP
elecP
elecP
Anti-windup onPower Limits
Anti-windup on Pitch LimitsTorqueControl
Pitch Control
PitchCompensation
PIMax & PIRat
PImin & -PIRat
errω PWmax & PWrat
PWmin & -PWrat
1 2
4
5
7
6
3
8
91 - Pitch2 - Pitch Control3 - Torque Control4 - Pitch Compensation5 - Power Control6 - Speed Reference7 - Mech Speed8 - Mech Angle9 - Elect Speed10- ElectAngle11- Washout12- Active Power
States10
WindPowerModel
if (fbus < fb ORfbus > fc)
FrequencyResponse
Curve
Active PowerControl
(optional)
avlP
avfP
To gewtgTrip Signal
(glimit)
WTG TerBus Freq
AuxiliarySignal(psig)
fbusΣ+
+
setp0
1
fflg
apcflg minP
maxP
stlp
setAPCP
1
MAX
ReleaseP
if fflg set
WindSpeed
(glimv)
1
12
11 pavsT+
+
− 1W
W
sTsT+
Σ++
11
wshoΣ perr
plim
Spdwl
Simulator calculates initial windspeed Spdwl.
ordP
ΣdbrP
+
+

Governor WNDTGE Wind Turbine and Turbine Control Model for GE Wind Turbines
1s
Two - Mass Rotor Model
1s
1s
1s
12H
12 gH
tgD
baseω
baseω
mechT
elecT
tgK
++
ΣΣ
Σ
Σ
Σ
Σ
0ω+
+rotorω
shaftT
++
−−
−
ω∆
0ω+
+
7 8
9 10
−
Turbine Speed
ω Generator Speed
mechmech
mech 0
PTω ω
=+
mechω
elecω
elecelec
elec 0
PTω ω
=+
Wind Power Model( )3
mechP ,2 r w pA v Cρ λ θ=
( / )b wK vλ ω=
( )4 4
0 0, i j
p iji j
C λ θ α θ λ= =
=∑∑See charts for curve fit values
Model supported by PSLF

Governor WNDTRB
Governor WNDTRB Wind Turbine Control Model
1s
90
0
r
Rotor speedω
mechP1
2
(1 )1PK sT
sT+
++−
11 asT+
refω
Σ
woP
πMXBPR
MX-BPR
Model supported by PSLF
1 2 3cos
1 - Input2 - Blade Angle (Deg)3 - Blade Pitch Factor
States

Governor WPIDHY
Governor WPIDHY Woodward PID Hydro Governor Model
−+
+
PK
DsK
iKs
+
+ ( )21
1 AsT+Σ 1s
MAXVel
11 BsT+Σ
1 REG
REGsT+
+ Σ−
MAXG
MING
MAXP
MINP
1
12
W
W
sTTs
−
+PG
D
+
Σ
0( ,0)G
1 1( , )G P
2 2( , )G P
3(1, )P
Gate Position (pu)
0 1.0
Model supported by PSSE
REFP
ΔωSpeed
−
MECHP
ELECP Per U
nit O
utpu
t (M
BA
SE)
1
2
45
763
1 - Mechanical Output2 - Measured Delta P3 - PID14 - PID25 - PID36 - Velocity7 - Gate
States
MINVel

Governor WSHYDD
Governor WSHYDD WECC Double-Derivative Hydro Governor Model
GVN
Δω(Speed) err
1db
11 DsT+
1
1 F
sKsT+
( )
22
21 F
s KsT+
+
+
+Σ IKs
refP
R
Σ+
−
−
11 TsT+( 0)TT >
elecP
1G
P
KsT+
OPENVEL
CLOSEVEL
1s
MAXP
MINP
2db
GV 11
turb turb
turb turb
sA TsB T
++
rateTMVA
GVP mechP+
−
Σ
Model supported by PSSE
0TT =
2 3
7
8
6
1
mech
D elec
1
2
2
1 - P 6 - Integrator2 - T 7 - P Sensed3 - K 8 - Valve4 - K first 9 - Gate5 - K second
States
4 5
9
Inputs GV1, PGV1...GV5, PGV5 are the x,y coordinates of blockGVN

Governor WSHYGP
Governor WSHYGP WECC GP Hydro Governor Plus Model
GVN
err
1db
11 DsT+
IKs
1D
f
sKsT+
+
+
+
R 11 tsT+( 0)tT >
1G
P
KsT+
1s 2db
GV 11
turb turb
turb turb
sA TsB T
++
rateTMVA
GVP+
−
Σ
PK
Σ+
−
−
0tT =
CVΣ
Model supported by PSSE
176
5
3
4
2
mechP
elecP
Δω(Speed)
refP
OPENVEL
CLOSEVEL
MAXP
MINP
mech elec
D
1 - P 5 - P Sensed2 - T 6 - Valve3 - Integrator 7 - Gate4 - Derivative
States
GV1, PGV1...GV5, PGV5 are the x,y coordinates of blockGVN

Governor WSIEG1
Governor WSIEG1 WECC Modified IEEE Type 1 Speed-Governor Model
Δω err
1db
4
11 sT+
1K
5
11 sT+
3K
6
11 sT+
5K
7
11 sT+
7K
Σ Σ
2K 4K 6K 8K
Σ Σ
Σ
Σ
HPPMECH
LPPMECH
+
+
+
+
+
+
++
++
++
M1P
M2P
GVN
OU
CU
1s
MAXP
MINP
2db
GV GVP−
−3
1T
K 2
1
11
sTsT
++
CV Σ
0GV
+
Model supported by PSSEGV1, PGV1...GV5, PGV5 are the x,y coordinates of blockGVN
1
653 4
2
1 - Lead-lag2 - Governor Output3 - Turbine 14 - Turbine 25 - Turbine 36 - Turbine 4
States
MIN MIN
MAX MAX
MIN MIN
MAX MAX
Iblock 1 : if P =0, P =PinitialIblock 2 : if P =0, P =PinitialIblock 3 : if P =0, P =Pinitial
: if P =0, P =Pinitial
===

Governor WT12T1
Governor WT12T1 Two-Mass Turbine Model for Type 1 and Type 2 Wind Generators
FromWT12AModel
Initial rotor slip
+−
Model supported by PSSE
Σ
Σ Σ
Σ
Σ
Σ
+
+
+
+ +
−
−
+
−
+
−
+
−
shaftD
Damp
12 tH s
12 gH s
1s
baseω
baseω
baseω Rotorangle
deviation
Σ shaftKs
elecT
mechT Speed
t tfrac
g t2
t gshaft
0
H =H×HH =H-H
2H ×H ×(2π×Freq1)K =
H×ω
1 - TurbineSpeed2 - ShaftAngle3 - GenSpeed4 - GenDeltaAngle
States
3
2
1
4

Governor WT1T
Governor WT1T Wind Turbine Model for Type-1 Wind Turbines
Model supported by PSLF
+ 12H
1sΣ
−
÷
shaftD
−
12 tH
1s
12 gH
1s
1s
K
÷
÷
Σ
Σ
Σ
Σ
Σt tfrac
g t2
t g
H =H×HH =H-H
2H ×H ×(2π×Freq1)K =
H
tω
gω
mechP
genP
Type 1 WTG Turbine Two - mass Model
Type 1 WTG Turbine One - mass Model
mechT
elecT
FromGovernor
Model
FromGenerator
Model
tω
gω
0ω
0ω
tω∆
gω∆
tgω∆tgω∆
−
−
−
+
+
+
+
−
accT
FromGenerator
Model
FromGovernor
Model
mechP
genP
ToGenerator Model andGovernor
Model
ω
1
2
3 4
1 - TurbineSpeed2 - ShaftAngle3 - GenSpeed4 - GenDeltaAngle
States
1
Damp
1s

Governor WT2T
Governor Model WT2T
Model supported by PSLF
H Inertia Damp Damping factor Htfrac Turbine inertia fraction Freq1 First shaft torsional frequency DShaft Shaft damping factor

Governor WT3T
Governor WT3T Wind Turbine Model for Type-3 (Doubly-fed) Wind Turbines
t tfrac
g t2
t g
H =H×HH =H-H
2H ×H ×(2π×Freq1)K =
H
Type 3 WTG Turbine Two - mass Model
1 - TurbineSpeed2 - ShaftAngle3 - GenSpeed4 - GenDeltaAngle
States
+ 12H
1sΣ
−
÷−
Type 3 WTG Turbine One - mass Model
accT
FromGenerator
Model
FromPitch Control
Model
mechPgenP
To Pitch Control Model and Converter Control Model
ω1+Σ−+
−
SimplifiedAerodynamic Model
π
moP
aeroKΣ+
Blade Pitchθ
0θ
Model supported by PSLF
2
2 1When windspeed > rated windspeed, blade pitch initialized to 10.75 W
ThetaV
θ
= −
Damp
shaftD
12 tH
1s
12 gH
1s
1s
K
÷
÷
Σ
Σ
Σ
Σ
Σ
tω
gω
mechP
genP
mechT
elecT
tω
gω
0ω
0ω
tω∆
gω∆
tgω∆tgω∆
−
−
−
+
+
+
+
−
1
2
3 41s

Governor WT3T1
Governor WT3T1 Mechanical System Model for Type 3 Wind Generator
Model supported by PSSE
+−Σ
Σ
Σ
Σ
Σ
+
+
+
+ +
−
−
+ +
−
+
−
shaftD
12 tH s
12 gH s
1s
baseω
Σ shaftKs
elecT
mechT
t tfrac
g t2
t gshaft
0
H =H×HH =H-H
2H ×H ×(2π×Freq1)K =
H×ω
3
2
1
4
Damp
+ Σ−+−
InitialPitchAngle
π aeroP initialaeroKΣ
+Blade Pitchθ
0θ1
1 State 1+
baseω
baseω
From WT3P1 Model
−
0ω
Rotor Angle
Deviation
Initial rotor slip
mechTΣ
tω∆
gω∆
tgω∆
gω

Governor WT4T
Model supported by PSSE
Governor WT4T Simplified Type-4 (Full Converter) Wind Turbine
_ Pelec Pord
1 2
States: 1 – Pelec 2 – PIOut 3 – Feedback
+
+
3
dPmin
dPmax
Pref
_ _
Pref
Piin Piou

2 CR
HVDC Two Terminal DC Control Diagram
1
2 3
(1 )(1 )(1 )
K sTsT sTα− +
+ +
ΣDESP MODPRECT+ +
DESDES
MEAS
PIV
=11 vsT+
DCV MEASVDESICONSTANT
POWERCONSTANTCURRENT
MEASVMINV
MAXI
MINI
If If , If ,
MIN DES MAX
ORD DES
MIN DES ORD DES
MAX DES ORD MAX
I I II II I I II I I I
≤ ≤=> =< =
11 CsT+
DCIMAXI
+
−
− +
MARGINSWITCHLOGIC 10%*
*MIN MAX
MIN LIM RATED
I IV V V
==
ORDI−LIM
0
Σ'Vα +
+
Σcoscos
R
I
αα
11 DsT+
1.35 CE
Vαcos cos
cos cos
R oOR
IOR
VEVE
α
α
α γ
α γ
= −
= −
OR OIE E
( )MEASI
RECTIFIER ( )MEASI
INVERTER
( )MODI
RECTIFIER
( )
CURRENTMARGIN
INVERTER
VOLTAGETRANSDUCER
CURRENTTRANSDUCER
0 min(cos cos ) 2 ( )(cos cos ) 2 ( )
OR MEAS C
OI STOP MEAS C
LIM E I R RECTLIM E I R IVERT
γ γγ γ
= + −= + −
MEASI
Available in old BPA IPF software

HVDC WSCC Stability Program Two-Terminal DC Line Model
ArV AiV
'rD '
iDrV iV piV
crX crR srL R L siL ciRviV ciX
1 2
3
vrV
prV
rP iP
I
r rPGEN jQGEN+
1: rNi iPGEN jQGEN−
:1iN
' '
'
3 2 3 2 cos cos2
3cos PGEN
cos
crr r AR pr r r
pr
r r cr r r
rr
r
IXE N V VV
ID E X D I
DE
γ θπ π
απ
θ
= = = −
= − =
=
' '
'
3 2 3 2 cos cos2
3cos PGEN
cos
cii i Ai pi i i
pi
i i ci i i
ii
i
IXE N V VV
ID E X D I
DE
β θπ π
απ
θ
= = = −
= − =
=
''
'''
( cos cos ) /
( cos cos ) /3WHERE ( )
r MIN i MIN vr vi TOT
r MIN i STOP vr vi TOT
TOT cr ci cr ci
I E E V V RI E E V V R
R R R R X X
α γα γ
π
= − − −
= + − −
= + + + −
Available in old BPA IPF software

6 CXπ
HVDC-MTDC Control System for Rectifiers and Inverters without Current Margin
1
2 3
(1 )(1 )(1 )
K sTsT sTα− +
+ +
DESDES
MEAS
PIV
=11 vsT+
DCV LAGVDESICONSTANT
POWERCONSTANTCURRENT
VDV
MAXI
MINI
If If , If ,
MIN D MAX
ORD D
D MAX ORD MAX
D MIN ORD MIN
I I II II I I II I I I
≤ ≤=
> =< =
11 CsT+
DCI
−
ORDILIM
0.0
3V
11 LIMsT+
doV
cos cos ONdoL
VV
αα γ= −
MEASI
REFI
0 min
0
(cos cos ) (cos cos )
doL
doL STOP
RECT LIM VINV LIM V
γ γγ γ
= += +
MEASI
+
Σ
1V Vα GREATEROF THE
TWO
CV
doLV
+1.
1.−
cosα
'MAXI
−
Available in old BPA IPF software

6 CXπ
HVDC-MTDC Control System for Terminals with Current Margin
1
2 3
(1 )(1 )(1 )
K sTsT sTα− +
+ +
+
ORDI
LIM
0.0
3V
11 LIMsT+
doV
cos cos ONdoL
VV
αα γ= −
MEASI
MARGI
(cos cos )doL ON STOPLIM V γ γ= +
MEASI+
1V Vα GREATEST
OF THETWO
CV
doLV
+1.
1.−
cosα
−
DCI 11 CsT+
1ORDI2ORDI
3ORDI
-1ORD NI
... Σ
Σ
2 ( )cos cosC MARGON o
do INITIAL
R FRAC IV
γ γ= +
(cos cos ) 2CORD do ON o C ORDV V R Iγ γ= − +
CORDV
0.25FRAC =
Available in old BPA IPF software

HVDC Detailed VDCL and Mode Change Card Multi-Terminal
DES
MEAS
PV
DES
MEAS
PV
1MEAS CV V>
ORDI
MEASV NO
YES
DESI
VDCL
1
Mode Change PU rated DC Voltage below
which mode is changed to constant from constant
CV
I P
1.0
1Y
0Y
1V 2V
CURRENT
VOLTAGE
1 0
1 2
VDCL, PU Current on rated Current base, V PU Voltage on rated Voltage base
Y YV
Available in old BPA IPF software

HVDC Equivalent Circuit of a Two Terminal DC Line
drV diV ciE
rX crR LR ciR iX
crE
dI, r rP Q
1:T
+
−
+
−
rR eqrR eqiR iR
, i iP Q
rEα iEαcosdor rV α cosdoi iV α−
1:T
DrV DiV
Available in old BPA IPF software

2 CR
HVDC BPA Converter Controller
1
2 3
(1 )(1 )(1 )
K sTsT sTα− +
+ +
ΣDESP MODPRECT+ +
DESDES
MEAS
PIV
=11 vsT+
DCV MEASVDESICONSTANT
POWERCONSTANTCURRENT
MEASVMINV
MAXI
MINI
If If , If ,
MIN DES MAX
ORD DES
MIN DES ORD DES
MAX DES ORD MAX
I I II II I I II I I I
≤ ≤=> =< =
11 CsT+
DCIMAXI
+
−
− +
MARGINSWITCHLOGIC 10%*
*MIN MAX
MIN LIM RATED
I IV V V
==
ORDI−LIM
0
Σ'Vα +
+
Σcoscos
R
I
αα
11 DsT+
1.35 CE
Vαcos cos
cos cos
R oOR
IOR
VEVE
α
α
α γ
α γ
= −
= −
OR OIE E
( )MEASI
RECTIFIER ( )MEASI
INVERTER
( )MODI
RECTIFIER
( )
CURRENTMARGIN
INVERTER
VOLTAGETRANSDUCER
CURRENTTRANSDUCER
0 min(cos cos ) 2 ( )(cos cos ) 2 ( )
OR MEAS C
OI STOP MEAS C
LIM E I R RECTLIM E I R IVERT
γ γγ γ
= + −= + −
MEASI
CURRENTCONTROLLER
DESI
Available in old BPA IPF software

HVDC BPA Block Diagram of Simplified Model
11T DC
L
i IsT+
ΣDESP( )MODPR+ +
DESDES
MEAS
PIV
=11 vsT+
drV MEASVdesICONSTANT
POWERCONSTANTCURRENT
MEASVMINV
MAXI
MINI
If If , If ,
MIN des MAX
ord des
MIN des ord MIN
MAX des ord MAX
I I II II I I II I I I
< <=≥ =≤ =
11 CsT+
dIMAXI
+
+
MARGINSWITCHLOGIC
ORDI
ord rIΣMODI
d MEASI
Control SchemeLogic
desI
+DI
DI +
+
I∆Σ
ord iI
0 0cos cos 2dor doi i
T
V V VR
α γ− −dorV
doiV
ordI
−( )current margin
. INV Controller
DCI
ord iI
ord rI
dIcoscos
r
i
αα
Control Scheme Logic
If: ; cos cos 2
T ordr d ordr
i o dor r doi o D T D
T ordi
i I CC CEA Control I IV V V R I
i I CIA CC Controlγ γ α γ
≥ → − → == = + +
≥ → − ; cos cos 2
d ordi
r o doi i do o D T D
ordi T ordr d T
I IV V V R I
I i I CIA CEA Control I iγ γ γ α
→ == = − −
< < → − → = ; r o i oα α γ γ= =Available in old BPA IPF software

HVDC BPA Block Diagram of Simplified Model
1 d
ssT+
11 fsT+
ss ε+
2
2
s sA Bs sC D
+ ++ +
K
MINI
MAXIMODI
AC
AC
IP
Low Level Modulation
1 d
ssT+
11 fsT+
ss ε+
2
2
s sA Bs sC D
+ ++ +
K*
MINP
*MAXP
MODPAC
AC
IP
High Level Modulation
11 d
ssT+ 1
11 fsT+ 1
ss ε+
21 1
21 1
s sA Bs sC D
+ ++ +
1K1
RECTω
21 d
ssT+ 2
11 fsT+ 2
ss ε+
22 2
22 2
s sA Bs sC D
+ ++ +
2K2
INVω
MINP
MAXP+
−
MODPΣ
Dual Frequancy Modulation
*MAX MAX DESIREDP P P= − *
MIN MIN DESIREDP P P= −
Available in old BPA IPF software

HVDC BPA Block Diagram of Simplified Model
11ssT+
3
41A sT
sT++
5
61B sT
sT++
Kγ
MINγ
MAXγγ
ACV
Gamma Modulation
1 3 4 5
MAX
, , , are in secs. is in degrees/pu volts, are in degrees , must be 1 or zero
HILO must be 5MIN
T T T T KA B
γγ γ
REFV
+
−Σ +
+
Σ
0γ
Available in old BPA IPF software

DC Converter Equations Revisited Normally the rectifier and inverter equations are written in terms of the firing angles 𝛼 and 𝛾.
Rectifier Equations Inverter Equations
𝑉𝑑𝑐𝑟 =3√2𝑁𝜋
�𝐷𝑏𝑎𝑠𝑒𝑇𝑎𝑝
�Vac cos(𝛼) − 𝑁 �3𝑋𝑐𝜋
+ 2𝑅𝑐� 𝐼𝑑𝑐
𝐸𝑎𝑐 = �𝐷𝑏𝑎𝑠𝑒𝑇𝑎𝑝
�Vac
𝜇 = cos−1 �cos𝛼 −√2𝐼𝑑𝑐𝑋𝑐𝐸𝑎𝑐
� − 𝛼
𝑉𝑑𝑐𝑖 =3√2𝑁𝜋
�𝐷𝑏𝑎𝑠𝑒𝑇𝑎𝑝
�Vac cos(𝛾) + 𝑁 �−3𝑋𝑐𝜋
+ 2𝑅𝑐� 𝐼𝑑𝑐
𝐸𝑎𝑐 = �𝐷𝑏𝑎𝑠𝑒𝑇𝑎𝑝
�Vac
𝜇 = cos−1 �cos 𝛾 −√2𝐼𝑑𝑐𝑋𝑐𝐸𝑎𝑐
� − 𝛾
For transient stability purposes it is more convenient to write the inverter equations in terms of 𝛽. 𝛽 is related to 𝛾 by 𝛽 = 𝜇 + 𝛾. During the simulation we will need to flip back and forth between 𝛽 and 𝛾, thus express 𝛽 as a function of 𝛾 and vice versa.
𝛽 = cos−1 �cos 𝛾 − √2𝐼𝑑𝑐𝑋𝑐𝐸𝑎𝑐
� and 𝛾 = cos−1 �cos𝛽 + √2𝐼𝑑𝑐𝑋𝑐𝐸𝑎𝑐
�. Now using the relationship cos 𝛾 = cos𝛽 + √2𝐼𝑑𝑐𝑋𝑐
𝐸𝑎𝑐, rewrite the DC voltage equation for the inverter in terms of 𝛽.
𝑉𝑑𝑐𝑖 =3√2𝑁𝜋
𝐸𝑎𝑐 �cos𝛽 +√2𝐼𝑑𝑐𝑋𝑐𝐸𝑎𝑐
� + 𝑁 �−3𝑋𝑐𝜋
+ 2𝑅𝑐� 𝐼𝑑𝑐
𝑉𝑑𝑐𝑖 =3√2𝑁𝜋
𝐸𝑎𝑐 cos𝛽 + 𝑁 �6𝑋𝑐𝜋
𝐼𝑑𝑐� + 𝑁 �−3𝑋𝑐𝜋
+ 2𝑅𝑐� 𝐼𝑑𝑐
𝑉𝑑𝑐𝑖 =3√2𝑁𝜋
𝐸𝑎𝑐 cos𝛽 + 𝑁 �3𝑋𝑐𝜋
+ 2𝑅𝑐� 𝐼𝑑𝑐 Using these equations, model the converter in the DC network equations as follows, with the extra constraint that the currents can NOT be negative.
𝑅𝑖𝑛𝑣 𝑅𝑟𝑒𝑐𝑡
𝐸𝑖𝑛𝑣 𝐸𝑟𝑒𝑐𝑡 𝐸𝑟𝑒𝑐𝑡 =
3√2𝑁𝜋
�𝐷𝑏𝑎𝑠𝑒𝑇𝑎𝑝
�Vac cos(𝛼𝑟)
𝑅𝑟𝑒𝑐𝑡 = 𝑁 �3𝑋𝑐𝜋
+ 2𝑅𝑐�
𝐼𝑟𝑒𝑐𝑡 𝐼𝑖𝑛𝑣
𝐸𝑖𝑛𝑣 =3√2𝑁𝜋
�𝐷𝑏𝑎𝑠𝑒𝑇𝑎𝑝
�Var cos(𝛽)
𝑅𝑖𝑛𝑣 = 𝑁 �3𝑋𝑐𝜋
+ 2𝑅𝑐�
+ --
+ --

Multi-Terminal DC Network DC Network Equations
𝑅𝑎 𝐿𝑎 𝑅𝑏 𝐿𝑏
𝑅𝑐
𝑅𝑑
𝐿𝑐
𝐿𝑑
𝑅𝑠
𝑅𝐶3 𝑅𝐶1
𝐸𝐶3 𝐸𝐶1
𝐸𝑆
𝐸𝐶1 =3√2𝑁𝜋
�𝐷𝑏𝑎𝑠𝑒𝑇𝑎𝑝
�VacC1cos (𝛼𝐶1) 𝐸𝐶3 =3√2𝑁𝜋
�𝐷𝑏𝑎𝑠𝑒𝑇𝑎𝑝
�VacC3cos (𝛼𝐶3)
𝐸𝑆 =3√2𝑁𝜋
�𝐷𝐶𝑏𝑎𝑠𝑒𝑇𝑎𝑝
�VacScos (𝛽𝑆)
VacS, VacC3, VacC1
Following are AC per unit voltages from the network equations.
cos(𝛽𝑆) , cos(𝛼𝐶1) , cos (𝛼𝐶1)
Following are outputs of the various dynamic DC converter models.
𝐼𝑐1 𝐼𝑏
𝐼𝑐
𝐼𝑑
𝐼𝑐3
𝐼𝑠
𝐼𝑎
𝑅𝐶1 = 𝑁𝐶1 �3𝑋𝑐𝐶1𝜋
+ 2𝑅𝑐𝐶1� 𝑅𝐶3 = 𝑁𝐶3 �
3𝑋𝑐𝐶3𝜋
+ 2𝑅𝑐𝐶3�
𝑅𝑆 = 𝑁𝑆 �3𝑋𝑐𝑆𝜋
+ 2𝑅𝑐𝑆� Note: For coding purposes it is easier to flip the direction of the current at the inverter and then just require that it be negative instead of positive
+ --
+ --
+ --

Implementation of the numerical solution of the PDCI In the normal network boundary equations and in Simulator's power flow engine, the DC converter control is assumed to be instantaneous. We assume that firing angle move instantaneously to bring DC currents instantaneously to a new operating point. For the PDCI we will be removing these assumptions completely and modeling the dynamics of the firing angle control. It is convenient for numerical reasons to make the control output of the DC converter equal to either cos(𝛼) and cos(𝛽) depending on whether the converter is acting as a rectifier or inverter. Here we will describe how this changes the numerical simulation of the multi-terminal DC line. Inside the transient stability engine in Simulator, an explicit integration method is used. Thus the general process of solving the equations is to use a numerical integration time step to update all dynamic state variables and then another step to update all the algebraic variables such as the AC system voltage and angle (network boundary equations). The MTDC simulation is added into this framework as follows. During each time-step of the numerical simulation of the multi-terminal DC Line, the following steps are taken
1. Using the standard routines within Simulator to calculate the new states for the dynamic models MTDC_PDCI, CONV_CELILO_E, CONV_CELILO_N, and CONV_SYLMAR. This is done along with all the other thousands of dynamic models. --> Updated Variables are cos(𝛼) or cos(𝛽) terms for the DC converters
2. Before solving all the other algebraic equations using the AC network boundary equations, take the new cos(𝛼) and cos(𝛽) terms and use them to model a step change in the DC voltages seen by the DC network equations. Use numerical integration to simulate the change in DC voltages and DC currents on the transmission lines for this time-step. Note that this is the only place in the numerical routines where the DC system currents in the system change. --> Updated Variables are the DC voltages and DC Currents
3. Finally, when the normal AC network boundary equations are being solved we must modify how the DC network equations are handled. Without the dynamic model for the MTDC line modeled, we assume that the DC currents respond instantaneously to a change in the DC voltages by an instantaneous change in the converter firing angles. Because the PDCI is modeling the actual dynamics of the DC converter firing angle change, we must assume that the firing angles remain constant during the network boundary equation solution instead. In addition, the PTDC is a very long transmission line and thus has a substantial inductance, therefore the current cannot change instantaneously either and must be assumed constant during the network boundary equation solution. This means that in order to solve the DC network equations we must allow the voltages in the DC network to change but since we're not allowing the currents to change, then this means all voltage changes from resistances must be zero. This means that the new voltage variations must be coming from the inductor L*dI/dt terms. We will show this below. --> Updated Variables are DC voltages

Numerical Integration to model the change in DC currents and DC voltages after a change in the 𝐜𝐨𝐬(𝜶) and 𝐜𝐨𝐬(𝜷) terms DC Converter equations are as follows, where R and E were described earlier. The unknown variable associated with this equation is the DC current. Note that it's possible for this to result in a current that is impossible (negative current injected into DC network for a rectifier or positive injection for an inverter). In that case we use a different equation which sets the current to zero.
DC transmission line equations are as follows. The unknown variable associate with this equation is the DC line current.
DC Bus equation is just Kirchhoff's Current Law (KCL). The unknown variable associated with the equation is the DC bus voltage.
𝐼𝑎 + 𝐼𝑏 + 𝐼𝑐 + ⋯ = 0
𝑅 𝐿
𝐼 𝑉𝑘(𝑛) − 𝑉𝑚(𝑛) − 𝑅𝐼(𝑛) = 𝐿
𝑑𝐼𝑑𝑡
(𝑛) 𝑉𝑘 +
_ 𝑉𝑚 +
_
dxdt (n) + dx
dt (n − 1)2
=x(n) − x(n − 1)
h
dxdt
(n) =2h
x(n) − �2h
x(n − 1) +dxdt
(n − 1)�
Remember the trapezoidal integration rule:
which gives
Where n = the present integer time step
h = the duration of the time step x(n) = value at present time x(n − 1) = value at previous time step
𝑉𝑘(𝑛) − 𝑉𝑚(𝑛) + �−𝑅 −2𝐿ℎ� 𝐼(𝑛) = �+𝑅 −
2𝐿ℎ� 𝐼(𝑛 − 1) − 𝑉𝑘(𝑛 − 1) + 𝑉𝑚(𝑛 − 1)
𝑉𝑘(𝑛) − 𝑉𝑚(𝑛) − 𝑅𝐼(𝑛) =2𝐿ℎ𝐼(𝑛) − �
2𝐿ℎ𝐼(𝑛 − 1) + 𝐿
𝑑𝐼𝑑𝑡
(𝑛 − 1)�
Use the trapezoidal rule to write the dI/dt(n) term
𝑉𝑘(𝑛) − 𝑉𝑚(𝑛) − 𝑅𝐼(𝑛) =2𝐿ℎ𝐼(𝑛) − �
2𝐿ℎ𝐼(𝑛 − 1)� − [𝑉𝑘(𝑛 − 1) − 𝑉𝑚(𝑛 − 1) − 𝑅𝐼(𝑛 − 1)]
Use the standard relationship above to write the LdI/dt(n-1) term
Finally, group the terms that are a function of values at time (n) on the left and time (n-1) on the right
𝑅𝐼 + 𝑉𝑡 = 𝐸 𝑜𝑟 𝐼 = 0 𝑅
𝐸 𝐼 𝑉𝑡 +
_
+ --

Using the PDCI as an example, the following matrix equations are created.
Ic1 Ic3 Is Ic Ia Ib Id v3 v4 v7 v8 v9
X
B
Celilo1
Rc1 1
Ic1 (n)
Ec1 Celilo3
Rc3 1
Ic3 (n)
Ec2
Sylmar1
Rs 1
Is (n)
Es
LineC
(-Rc-2Lc/h) 1 -1
Ic (n)
(+Rc-2Lc/h)*Ic(n-1) - v3 (n-1) + v4 (n-1)
LineA
(-Ra-2La/h) -1 1
Ia (n)
(+Ra-2La/h)*Ia(n-1)
- v7 (n-1) + v3 (n-1)
LineB
(-Rb-2Lb/h) -1 1
Ib (n) = (+Rb-2Lb/h)*Ib(n-1)
- v8 (n-1) + v3 (n-1)
LineD
(-Rd-2Ld/h) -1 1
Id (n)
(+Rd-2Ld/h)*Id(n-1) - v9 (n-1) + v4 (n-1)
KCL3
-1 1 1
v3 (n)
0 KCL4
1 1
v4 (n)
0
KCL7
1 -1
v7 (n)
0 KCL8
1 -1
v8 (n)
0
KCL9
1 -1
v9 (n)
0 Simulator solves this set of equations by splitting the actual integration time-step used in the standard numerical integration and dividing it by 10. We set the h variable above to the time step divided by 10 then iterate this set of equations 10 times. When solving these equations, we initially assume that none of the currents end up the wrong sign. Then after each sub time step we check if the converter currents end up as the wrong sign. If converter currents have the wrong sign, we automatically change the equation for the offending converter to force that converter current to zero and redo this sub time step. We assume the converter current remains zero during the remainder of this time step and only allow it to back-off this limit during the following time step. I believe the current would never bounce around during a time step anyway, because this is fundamentally only a set of RL circuits so you will only get a first-order RL circuit exponential decay response toward the new steady state. As an example, if the current at Celilo1 ended up the wrong sign, then its matrix equation would be rewritten as
Celilo1
1 0
Ic1 (n)
0

Solution of the algebraic change in DC voltages during the AC network boundary equation solution DC Converter equations are as follows, where R and E were described earlier. Also note that the DC current is assumed constant so it is moved to the right side as a known quantity. The unknown variable associated with this equation is the voltage at the terminal.
DC transmission line equations are as follows. The unknown variable associated with equation is the derivative of the DC current. The DC current is assumed constant during the AC network boundary equation solution.
DC Bus equation is just Kirchhoff's Current Law (KCL), but for the derivatives of the currents instead of the actual currents. The unknown variable associated with the equation is DC bus voltage. Also note that we only add an equation for DC buses which are not connected to a DC converter terminal.
Using the PDCI as an example, the following matrix equations are created
LineC
-Lc 1 -1
dIc/dt
Ic*Rc LineA
-La 1 -1
dIa/dt
Ia*Ra
LineB
-Lb 1 -1
dIb/dt
Ib*Rb LineD
-Ld 1 -1
dId/dt
Id*Rd
Celilo1
1
v7 = Ec1-Rc1*Ic1 Celilo3
1
v8
Ec3-Rc3*Ic3
Sylmar1
1
v9
Es-Rs*Is KCL3
-1 1 1 0
v3
0
KCL4
1 1 0
v4
0
𝑑𝐼𝑎𝑑𝑡
+𝑑𝐼𝑏𝑑𝑡
+𝑑𝐼𝑐𝑑𝑡
+ ⋯ = 0
𝑅 𝐿
𝐼 𝑉𝑘 − 𝑉𝑚 − 𝐿
𝑑𝐼𝑑𝑡
= 𝑅𝐼 𝑉𝑘 +
_ 𝑉𝑚 +
_
𝑉𝑡 = 𝐸 − 𝑅𝐼
𝑅
𝐸 𝐼 𝑉𝑡 +
_
+ --

General Overview of Multi-Terminal DC Line Model for the Pacific DC Intertie Simulator has a multi-terminal DC (MTDC) record which represents the grouping of the dc converters, dc buses and dc lines for a single pole of a MTDC transmission line. The Pacific DC Intertie (PDCI) is represented by two of these records: one for each pole of the PDCI. For the PDCI, each MTDC record contains three DC converters with two at Celilo (North end) and one at Sylmar (South end). In Simulator these DC converters are also represented by unique objects. The transient stability model of the PDCI works by assigning a dynamic model to each of the two MTDC records, and also assigning a dynamic model to each of the DC converter objects. To model this, there are 4 dynamic models
MTDC_PDCI Assigned to the MTDC record. CONV_CELILO_E Assigned to the Celilo DC converter at the 230 kV bus at Celilo (North). Note: "E" stands for "existing" CONV_CELILO_N Assigned to the Celilo DC converter at the 500 kV bus at Celilo (North). Note: "N" stands for "new" CONV_SYLMAR Assigned to the DC converter at Sylmar (South)
The flow of signals is depicted in the following image.
MTDCRecord Pole 3
Converter Celilo 230kV
Converter Celilo 500kV
Converter Sylmar
CONV_CELILO_E
MTDC_PDCI
CONV_CELILO_N CONV_SYLMAR 𝐼𝑑_𝑟𝑒𝑓_𝐶𝐸
𝐼𝑑_𝑟𝑒𝑓_𝐶𝑁 𝑉𝑎𝑐𝐿𝑜𝑤
𝐼𝑑𝑐 𝑉𝑑𝑐 𝑉𝑎𝑐
𝐼𝑑𝑐, 𝑉𝑑𝑐, 𝑉𝑎𝑐
𝐼𝑑𝑐,𝑉𝑑𝑐, 𝑉𝑎𝑐
cos(𝛼) 𝑐𝑜𝑠(𝛼)
𝐼𝑑𝑐,𝑉𝑑𝑐 ,𝑉𝑎𝑐
cos (𝛽)
MTDCRecord Pole 4
𝑉𝑝𝑜𝑙𝑒4𝑑𝑐
𝑉𝑝𝑜𝑙𝑒3𝑑𝑐
Power Flow Data Record
Transient Stability Model
𝐼𝑑𝑐𝑠𝑒𝑛𝑠𝑒 𝑉𝑑𝑐𝑠𝑒𝑛𝑠𝑒 𝑉𝑎𝑐𝑠𝑒𝑛𝑠𝑒
𝐼𝑑_𝑟𝑒𝑓_𝑆
𝐼𝑑𝑐𝑠𝑒𝑛𝑠𝑒 𝑉𝑑𝑐𝑠𝑒𝑛𝑠𝑒 𝑉𝑎𝑐𝑠𝑒𝑛𝑠𝑒
𝐼𝑑𝑐𝑠𝑒𝑛𝑠𝑒 𝑉𝑑𝑐𝑠𝑒𝑛𝑠𝑒 𝑉𝑎𝑐𝑠𝑒𝑛𝑠𝑒
𝐼𝑑𝑐,𝑉𝑑𝑐 ,𝑉𝑎𝑐
𝐼𝑑𝑐,𝑉𝑑𝑐 ,𝑉𝑎𝑐

The function of the converts is generally described as follows. MTDC_PDCI Assigned to the MTDC record. Model will coordinate the allocation of current order reference signals
sent to the three DC converters that it manages. Model may also pass on various flags such a VacLow. Model receives signals of sensed AC and DC voltage and DC current from the converters also. The two MTDC_PDCI models will act independently of one another, except that each record passes a measurement of the DC voltage at the rectifier end of each pole to the other pole.
CONV_CELILO_E Assigned to the "existing" Celilo DC converter at the 230 kV bus at Celilo (North). Converter initializes its Isched and Psched values to those from the initial network boundary equation solution. Model will take as an input one signals from MTDC_PDCI: the current order reference signal (𝐼𝑑_𝑟𝑒𝑓_𝐶𝐸).
CONV_CELILO_N Assigned to the "new" Celilo DC converter at the 500 kV bus at Celilo (North). Converter initializes its Isched and Psched values to those from the initial network boundary equation solution. Model will take as an input two signals from MTDC_PDCI: the current order reference signal (𝐼𝑑_𝑟𝑒𝑓_𝐶𝑁) and the flag VacLow.
CONV_SYLMAR Assigned to the DC converter at Sylmar (South). Converter initializes its Isched and Psched values to those from the initial network boundary equation solution. Model will take as an input one signalsfrom MTDC_PDCI: the current order reference signal (𝐼𝑑_𝑟𝑒𝑓_𝑆).
In addition the implementation of these four models will be automatically modify based on the initial flow in the initial system flow direction (depending whether the flow is from Celilo to Sylmar or Sylmar to Celilo). These modifications reflect the differences in how each converter behaves when acting as a rectifier or inverter. In the following block diagrams portions of the model which are only used for a flow from Celilo to Sylmar (North to South) are highlighted in green, while portion only used for a flow from Sylmar to Celilo (North to South) are highlighted in purple. Differences also have a red notation of 𝐹𝑙𝑎𝑔𝑁𝑆 added to denote highlighting. Values which are passed between models are highlighted in orange. Outputs of the control angle for DC converters are highlighted in pink.

MTDC_PDCI (North to South Implementation) Measurements and Low Voltage Detection Logic
11 + 𝑠𝑇𝑉𝑑𝑐_𝑓𝑟𝑖𝑧
2
0.51 + 𝑠𝑇𝑓_𝑉𝐷𝐶
1
𝐼𝑓 (𝑉𝑎𝑐𝐶𝑒𝑙𝑖𝑙𝑜230 < 0.5) 𝑂𝑅 (𝑉𝑎𝑐𝐶𝑒𝑙𝑖𝑙𝑜500 < 0.5) 𝑇ℎ𝑒𝑛 𝑽𝒂𝒄𝑳𝒐𝒘𝑪𝒆𝒍𝒊𝒍𝒐 = 𝑇𝑅𝑈𝐸 𝐼𝑓 (𝑉𝑎𝑐𝐶𝑒𝑙𝑖𝑙𝑜230 > 0.6) 𝐴𝑁𝐷 (𝑉𝑎𝑐𝐶𝑒𝑙𝑖𝑙𝑜500 < 0.6) 𝑇ℎ𝑒𝑛 𝑽𝒂𝒄𝑳𝒐𝒘𝑪𝒆𝒍𝒊𝒍𝒐 = 𝐹𝐴𝐿𝑆𝐸 𝐼𝑓 �𝑉𝑎𝑐𝑆𝑦𝑙𝑚𝑎𝑟 < 0.5� 𝑇ℎ𝑒𝑛 𝑽𝒂𝒄𝑳𝒐𝒘𝑺𝒚𝒍𝒎𝒂𝒓 = 𝑇𝑅𝑈𝐸 𝐼𝑓 �𝑉𝑎𝑐𝑆𝑦𝑙𝑚𝑎𝑟 > 0.6� 𝑇ℎ𝑒𝑛 𝑽𝒂𝒄𝑳𝒐𝒘𝑺𝒚𝒍𝒎𝒂𝒓 = 𝐹𝐴𝐿𝑆𝐸 𝐼𝑓 (𝑉𝑑𝑐𝑠𝑒𝑛𝑠𝑒𝐶𝑒𝑙𝑖𝑙𝑜500 < 150) 𝑂𝑅 �𝑉𝑑𝑐𝑠𝑒𝑛𝑠𝑒𝑆𝑦𝑙𝑚𝑎𝑟 < 150� 𝑇ℎ𝑒𝑛 𝑽𝒅𝒄𝑳𝒐𝒘 = 𝑇𝑅𝑈𝐸 𝐼𝑓 (𝑉𝑑𝑐𝑠𝑒𝑛𝑠𝑒𝐶𝑒𝑙𝑖𝑙𝑜500 > 350) 𝐴𝑁𝐷 �𝑉𝑑𝑐𝑠𝑒𝑛𝑠𝑒𝑆𝑦𝑙𝑚𝑎𝑟 > 350� 𝑇ℎ𝑒𝑛 𝑽𝒅𝒄𝑳𝒐𝒘 = 𝐹𝐴𝐿𝑆𝐸 𝑽𝒂𝒄𝑳𝒐𝒘 = 𝑽𝒂𝒄𝑳𝒐𝒘𝑪𝒆𝒍𝒊𝒍𝒐 𝑂𝑅 𝑽𝒅𝒂𝒄𝑳𝒐𝒘𝑺𝒚𝒍𝒎𝒂𝒓 𝑽𝒍𝒐𝒘𝑭𝒍𝒂𝒈 = 𝑽𝒂𝒄𝑳𝒐𝒘 𝑂𝑅 𝑽𝒅𝒄𝑳𝒐𝒘
DC Voltage Measurement Freeze If VLowFlag = TRUE then activate a timer TimerVDCFreeze and set timer to Tdelfriz. Continue to set this timer up to Tdelfriz as long as VLowFlag is TRUE. If VLowFlag become FALSE then start having the timer count down to zero. Once the TimerVDCFreeze reaches zero then make it inactive. Whenever TimerVDCFreeze is inactive then
Set VDCFreeze = and pass as the DC voltage to Current Order Allocation Calculation
Whenever TimerVDCFreeze is active then Pass the variable VDCFreeze as the DC voltage to the Current Order Calculation
Pole Current Margin Compensator If VLowFlag = TRUE then activate a timer TimerPCMC and set timer to Tpcmc_rst. Continue to set this timer up to Tpcmc_rst as long as VLowFlag is TRUE. If VLowFlag become FALSE then start having the timer count down to zero. Once the TimerPCMC reaches zero then make it inactive.
2 1
�𝑉𝑑𝑐𝑆𝑦𝑙𝑚𝑎𝑟3𝑃 + 𝑉𝑑𝑐𝑆𝑦𝑙𝑚𝑎𝑟4𝑃�
(𝑉𝑑𝑐𝐶𝑒𝑙𝑖𝑙𝑜3𝑃 + 𝑉𝑑𝑐𝐶𝑒𝑙𝑖𝑙𝑜4𝑃) 𝐹𝑙𝑎𝑔𝑁𝑆
State 2 from the Celilo500 and Sylmar converter
Direct readings of AC voltage at
converter buses

ΣΣ
Σ
𝑒−𝑗𝑇𝐼𝑑𝑐
MTDC_PDCI Current Order Allocation Calculations for Celilo and Sylmar
Σ
𝑉𝑎𝑐𝑅𝑒𝑓𝑉𝐷𝐶𝐿
+ _
𝐴𝐶𝑉𝑑𝑐𝑙𝑚𝑎𝑥 ∗ 2𝑠(𝑇𝑣𝑎𝑐𝑣𝑑𝑐𝑜𝑙)
−0.5
𝐴𝐶𝑉𝑑𝑐𝑙𝑚𝑎𝑥
𝐴𝐶𝑉𝑑𝑐𝑙𝑚𝑖𝑛 𝑀𝐼𝑁
4
(𝐼𝑑𝑅𝑒𝑓𝐿𝑖𝑚𝐶𝐸 + 𝐼𝑑𝑅𝑒𝑓𝐿𝑖𝑚𝐶𝑁)
Σ+
11 + 𝑠�𝑇𝑉 𝑏𝑐𝑜𝑐 �
÷ 𝑀𝐼𝑁 𝑝𝑜𝑟𝑑_𝑝𝑜𝑙𝑒
1000 𝐷𝑒𝑛 𝑁𝑢𝑚 Σ
1𝑠𝑇𝑝𝑐𝑚𝑐
(∗)
0
330
0
Σ0
5
3
Σ_
+ +
+ +
𝑣𝑑_𝑝𝑜𝑙𝑒
𝑒−𝑗𝑇𝑑𝑒𝑙𝑎𝑦
𝐼𝑑𝑅𝑒𝑓𝐿𝑖𝑚_𝑆
+
_
𝑖𝑜𝑟𝑑_𝑝𝑜𝑙𝑒_𝐶
𝑖𝑑 𝑟𝑒𝑓 𝑆
TimerVDCFreeze Active
𝑖𝑑_𝑝𝑜𝑐𝑙_lim_𝐶
𝑖𝑑_𝑜𝑟𝑑_𝑝𝑜𝑙𝑒
1 − 𝐾𝑐
𝐾𝑐
Σ
Σ
Σ
Σ
1100
2000
+ +
_
_ +
+
+
+ Σ
Σ
Σ
Σ
𝐼𝑑𝑅𝑒𝑓𝐿𝑖𝑚_𝐶𝑁
𝐼𝑑𝑅𝑒𝑓𝐿𝑖𝑚_𝐶𝐸
+ +
_
_ +
+
+
+
𝑖𝑑_𝑟𝑒𝑓_𝐶𝐸 𝑖𝑑_𝑟𝑒𝑓_𝐶𝑁
𝑒−𝑗𝑇𝐼𝑑𝑐 𝑒−𝑗𝑇𝐼𝑑𝑐
1
_
𝑉𝐷𝐶𝐹𝑟𝑒𝑒𝑧𝑒
TimerVDCFreeze Inactive When TimerPCMC is Active then Reset = 0 5
(∗)
1𝑠𝑇𝑖𝑐𝑚𝑐
(∗)
Σ
Σ
Σ
(∗)
𝑖𝑑_𝑀𝑎𝑟𝑔𝑖𝑛_𝐶𝐸
100 +
+ _
+
_
_ +
_ 6
Σ
𝐼𝑑𝐼𝑛𝑖𝑡𝑅𝑒𝑓𝐶 _
+
_
+
+
+
𝐹𝑙𝑎𝑔𝑁𝑆
𝐹𝑙𝑎𝑔𝑁𝑆
𝐹𝑙𝑎𝑔𝑁𝑆
𝐹𝑙𝑎𝑔𝑁𝑆
𝐹𝑙𝑎𝑔𝑁𝑆
Purple represent sections only modeled for Sylmar-Celilo Flow Green represents sections only modeled for Celilo-Sylmar flow
𝐼𝑑𝐼𝑛𝑖𝑡𝑅𝑒𝑓𝑆
+
_
0
if 𝑉𝑎𝑐𝐿𝑜𝑤𝑆𝑦𝑙𝑚𝑎𝑟 then use zero
A B C
= 𝐼𝑑𝑐𝑠𝑒𝑛𝑠𝑒𝐶𝑒𝑙𝑖𝑙𝑜500 = 𝐼𝑑𝑐𝑠𝑒𝑛𝑠𝑒𝐶𝑒𝑙𝑖𝑙𝑜230 = 𝐼𝑑𝑐𝑠𝑒𝑛𝑠𝑒𝑆𝑦𝑙𝑚𝑎𝑟
A
B C
B
A
𝑉𝑎𝑐𝑠𝑒𝑛𝑠𝑒𝐶𝑒𝑙𝑖𝑙𝑜500 State 1 from the respective DC converters
State 3 from the Celilo 500 converter

MTDC_PDCI Parameters are all hard-coded based on whether the initial flow direction of the PDCI. The parameters and the initialization are different for Celilo to Sylmar (North to South) or Sylmar to Celilo (South to North) flow. The following table shows the differences Initialization
Reference Values Celilo-Sylmar (North to South)
Sylmar - Celilo (South to North)
𝑝𝑜𝑟𝑑_𝑝𝑜𝑙𝑒 Initialize to Sum of Psched at two Celilo Converters
Initialize to Psched at the Sylmar Converter
Parameter Celilo-Sylmar (North to South)
Sylmar - Celilo (South to North)
𝑇𝑓𝑝𝑐𝑚𝑐_𝑟𝑠𝑡 0.1 𝐾𝐶 Initialize based on the following equation
𝐾𝐶 =𝑖𝑑_𝑟𝑒𝑓_𝐶𝐸
𝑖𝑑_𝑟𝑒𝑓_𝐶𝐸 + 𝑖𝑑_𝑟𝑒𝑓_𝐶𝑁 𝑇𝑉𝐷𝐶_𝑓𝑟𝑖𝑧 0.53
𝑇𝑑𝑒𝑙𝑓𝑟𝑖𝑧 0.44 𝑉𝑎𝑐𝑅𝑒𝑓𝑉𝐷𝐶𝐿 228/230 n/a 𝑉𝑎𝑐𝐿𝑜𝑤𝑆𝑦𝑙𝑚𝑎𝑟 FALSE 𝐴𝐶𝑉𝑑𝑐𝑙𝑚𝑎𝑥 3100 n/a 𝑉𝑎𝑐𝐿𝑜𝑤𝐶𝑒𝑙𝑖𝑙𝑜 FALSE 𝐴𝐶𝑉𝑑𝑐𝑙𝑚𝑖𝑛 2400 n/a 𝑉𝑑𝑐𝐿𝑜𝑤 FALSE 𝑇𝑣𝑐𝑎𝑐𝑣𝑑𝑐𝑜𝑙 0.5 n/a 𝑉𝐿𝑜𝑤𝐹𝑙𝑎𝑔 FALSE
𝐼𝑑𝐼𝑛𝑖𝑡𝑅𝑒𝑓𝐶 n/a Initialize equal to State 14 to handle difference between 𝑖𝑑_𝑜𝑟𝑑_𝑝𝑜𝑙𝑒 and 𝑖𝑑_ref_S
𝐼𝑑𝑅𝑒𝑓𝐿𝑖𝑚𝐶𝐸 Get from CONV_CELILO_E model 𝐼𝑑𝑅𝑒𝑓𝐿𝑖𝑚𝐶𝑁 Get from CONV_CELILO_N model 𝐼𝑑𝑅𝑒𝑓𝐿𝑖𝑚𝑆 Get from CONV_SYLMAR model 𝑇𝑣_𝑏𝑐𝑜𝑐 0.05
𝑇𝑝𝑐𝑚𝑐 0.5120 𝐼𝑑𝐼𝑛𝑖𝑡𝑅𝑒𝑓𝑆 Initialize equal to State 14 to handle difference between 𝑖𝑑_𝑜𝑟𝑑_𝑝𝑜𝑙𝑒 and 𝑖𝑑_𝑟𝑒𝑓_𝐶𝑁 + 𝑖𝑑_𝑟𝑒𝑓_𝐶𝐸
n/a 𝑇𝑖𝑐𝑚𝑐 n/a 0.2500
𝐼𝑑_𝑚𝑎𝑟𝑔𝑖𝑛_𝐶𝐸 Get from CONV_CELILO_E model 𝑇𝐼𝑑𝑐 0.5 cycles 𝑇𝑑𝑒𝑙𝑎𝑦 2 cycles

CONV_CELILO_E parameters are all hard-coded based on whether the initial flow direction of the PDCI. The parameters and the initialization are different for Celilo to Sylmar (North to South) or Sylmar to Celilo (South to North) flow. The following table shows the differences
Parameter Celilo-Sylmar (North to
South)
Sylmar - Celilo (South to
North)
Initialization Reference
Values
Celilo-Sylmar (North to South)
Sylmar - Celilo (South to North)
𝑇𝑏𝐶𝐸 0.0323 𝑅𝑖𝑐𝑢𝐶𝐸 2.2 Initialize so State 5 is at its lower limit
𝑅𝑖𝑐𝑢𝐶𝐸 = ∗ 1.8 ∗ 1000
𝑇𝑐𝐶𝐸 0.0323 𝐾𝑎𝐶𝐸 330 82.5 𝑇𝑎𝐶𝐸 8.1500 Parameter Celilo-Sylmar
(North to South) Sylmar - Celilo (South to North) 𝑉𝐶𝐴_𝑢𝑝_𝐶𝐸 20 8.5
𝑇𝑏𝐷𝐴𝐷 0 1/240 𝐼𝑑𝑅𝑒𝑓𝐿𝑖𝑚𝐶𝐸 2160 𝑇𝑐𝐷𝐴𝐷 1/60 𝑇𝑓_𝐼𝐷𝐶 0.004 0.0084 𝐾𝑚𝐶𝐸 1 -1 𝑇𝑓_𝑉𝐷𝐶 0.004 0.0084
𝑖𝑑_𝑚𝑎𝑟𝑔𝑖𝑛_𝐶𝐸 0 180 𝑇𝑓_𝑉𝐴𝐶 0.0333
7.551.8
∗1
1000 Σ Σ
1000
+
_ 1 + 𝑠𝑇𝑏𝐶𝐸1 + 𝑠𝑇𝑐𝐶𝐸
Σ+
𝑆𝑒𝑛𝑠𝑒𝑑 𝐼𝑑𝑐 𝑎𝑡 𝐶𝑒𝑖𝑙𝑜 230
𝑖𝑑_𝑟𝑒𝑓_𝐶𝐸 𝐾𝑎𝐶𝐸1 + 𝑠𝑇𝑎𝐶𝐸
0.1
1
4
cos �16𝜋180
�
_ +
𝑖𝑑_𝑀𝑎𝑟𝑔𝑖𝑛_𝐶𝐸 _
𝑅𝑖𝑐𝑢𝐶𝐸1.8
∗1
1000
1 + 𝑠𝑇𝑏𝐷𝐴𝐷1 + 𝑠𝑇𝑐𝐷𝐴𝐷
𝑉𝐶𝐴_𝑢𝑝_𝐶𝐸 19.5746
(∗)
+ _
𝑐𝑜𝑠𝑐𝑡𝑙𝑎𝑛𝑔𝐶𝐸
5 6
𝑶𝒗𝒆𝒓𝑪𝒖𝒓𝒓𝒆𝒏𝒕𝑭𝒍𝒂𝒈
0
CONV_CELILO_E Celilo 230 kV Converter Controls (Celilo Existing Controls)
𝐹𝐴𝐿𝑆𝐸 𝑇𝑅𝑈𝐸
𝐼𝑓 ( ) < (𝑖𝑑_𝑟𝑒𝑓_𝐶𝐸 + 400) 𝑇ℎ𝑒𝑛 𝑶𝒗𝒆𝒓𝑪𝒖𝒓𝒓𝒆𝒏𝒕𝑭𝒍𝒂𝒈 = 𝐹𝐴𝐿𝑆𝐸
𝐼𝑓 ( ) > (𝑖𝑑_𝑟𝑒𝑓_𝐶𝐸 + 800) 𝑇ℎ𝑒𝑛 𝑶𝒗𝒆𝒓𝑪𝒖𝒓𝒓𝒆𝒏𝒕𝑭𝒍𝒂𝒈 = 𝑇𝑅𝑈𝐸
1
1
𝐾𝑚𝐶𝐸
100 𝐹𝑙𝑎𝑔𝑁𝑆
Purple represent sections only modeled for Sylmar-Celilo Flow
Green represents sections only modeled for Celilo-Sylmar flow
𝐹𝑙𝑎𝑔𝑁𝑆
11 + 𝑠𝑇𝑓_𝑉𝐴𝐶
𝐼𝑑𝑐 1
1 + 𝑠𝑇𝑓_𝐼𝐷𝐶 1
𝑉𝑎𝑐 3
𝑉𝑑𝑐 1
1 + 𝑠𝑇𝑓_𝑉𝐷𝐶 2
𝐼𝑑𝑐𝑠𝑒𝑛𝑠𝑒
𝑉𝑎𝑐𝑠𝑒𝑛𝑠𝑒
𝑉𝑑𝑐𝑠𝑒𝑛𝑠𝑒
1
4

0.51100
Σ60
Σ
𝑖𝑑_𝑀𝑎𝑟𝑔𝑖𝑛_𝐶𝑁 𝐼𝑑𝑅𝑒𝑓𝐿𝑖𝑚_𝐶𝑁
+ _ 𝐾𝑖𝐶𝑁
1 + 𝑠𝑇𝑖𝐶𝑁
Σ+
_
0.51100
Σ_
+
𝑀𝐼𝑁
𝑆𝑒𝑛𝑠𝑒𝑑 𝐼𝑑𝑐 𝑎𝑡 𝐶𝑒𝑙𝑖𝑙𝑜 500
Σ 𝑜𝑐 > 𝑢𝑝
𝑜𝑐 𝑢𝑝
𝑖𝑑𝑡𝑟𝑖𝑝_𝐶𝑁
𝐾𝑣𝑑𝑖𝑑1
1𝑠𝑇𝑎𝑖
Σ𝑀𝐼𝑁
Σ
𝐾𝑖𝑣𝑔_𝐶𝑁
Σ
𝑝𝑎𝑟_𝑣𝑑_𝑟𝑒𝑓
𝑖𝑑_𝑟𝑒𝑓_𝐶𝑁
_
+ 0.001
1 + 𝑠𝑇𝑣 Σ
𝑅𝐸𝑆𝐸𝑇
v𝑑_𝑜𝑓𝑓_𝐶𝑁
𝑀𝐴𝑋
𝐾𝑣
𝑀𝐼𝑁 1.0 𝐾𝑣𝑑𝑖𝑑
0 𝑜𝑟(∗) -1
2 𝑜𝑟(∗) 2.0 𝑜𝑟 0.0
0.0 𝑜𝑟 − 2.0
+
+ +
+
1𝑠𝑇𝑡
𝑀𝐼𝑁
2.0
𝑎𝑙𝑝ℎ𝑎_max_𝐶𝑁
1
2
4
7
6
5
𝑎𝑙𝑝ℎ𝑎_min_𝐶𝑁
𝑐𝑜𝑠𝑐𝑡𝑙𝑎𝑛𝑔𝐶𝑁
_ +
+ +
+
+
𝑆𝑒𝑛𝑠𝑒𝑑 𝑉𝑑𝑐 𝑎𝑡 𝐶𝑒𝑙𝑖𝑙𝑜 500
CONV_CELILO_N Celilo 500 kV Converter Controls (Celilo Expansion Controls)
𝑀𝐼𝑁
11 + 𝑠𝑇𝑓_𝑉𝐷𝐶
𝑔𝑎𝑚𝑟𝑒𝑓17
𝐾𝑔𝑖𝑑𝐶𝑁
𝐾𝑔2
𝐾𝑣𝑑𝑖𝑑2
Σ
𝑔𝑎𝑚𝑟𝑒𝑓
Σ
𝑔𝑎𝑚𝑚𝑎 [in degrees]
𝑜𝑓𝑓𝑔𝑎𝑚
+ +
+ _
𝐾𝑚𝐶𝑁
60
𝐹𝑙𝑎𝑔𝑁𝑆 𝐹𝑙𝑎𝑔𝑁𝑆
0.0
𝐹𝑙𝑎𝑔𝑁𝑆
Purple represent sections only modeled for Sylmar-Celilo Flow Green represents sections only modeled for Celilo-Sylmar flow
if 𝑉𝑎𝑐𝐿𝑜𝑤 0.0
11 + 𝑠𝑇𝑓_𝑉𝐴𝐶
𝐼𝑑𝑐 1
1 + 𝑠𝑇𝑓_𝐼𝐷𝐶 1
𝑉𝑎𝑐 3
𝑉𝑑𝑐 1
1 + 𝑠𝑇𝑓_𝑉𝐷𝐶 2
𝐼𝑑𝑐𝑠𝑒𝑛𝑠𝑒
𝑉𝑎𝑐𝑠𝑒𝑛𝑠𝑒
𝑉𝑑𝑐𝑠𝑒𝑛𝑠𝑒
8
1.0
𝑖𝑑_𝑟𝑒𝑓𝑐
𝑑𝑖𝑟𝑒𝑓
𝑖𝑑_𝑒𝑟𝑟
𝑣𝑖𝑑𝑐𝑜
𝑖𝑛𝑡𝑖𝑛𝑝

CONV_CELILO_N parameters are all hard-coded based on whether the initial flow direction of the PDCI. The parameters and the initialization are different for Celilo to Sylmar (North to South) or Sylmar to Celilo (South to North) flow. The following table shows the differences.
Parameter Celilo-Sylmar (North to South)
Sylmar - Celilo (South to North)
Parameter Celilo-Sylmar (North to South)
Sylmar - Celilo (South to North)
𝑖𝑑_𝑀𝑎𝑟𝑔𝑖𝑛_𝐶𝑁 0 150 𝐾𝑖𝑣𝑔_𝐶𝑁 -0.264 +0.26400 𝐼𝑑𝑅𝑒𝑓𝐿𝑖𝑚_𝐶𝑁 1650 𝑇𝑡 -1/360 +1/360 𝑖𝑑𝑡𝑟𝑖𝑝_𝐶𝑁 +110 -110 𝑎𝑙𝑝ℎ𝑎_max_𝐶𝑁 +1.000 +1.91260 𝑖𝑑_𝑚𝑖𝑛_𝑚𝑖𝑛 n/a 60 𝑎𝑙𝑝ℎ𝑎_min_𝐶𝑁 -1.992 +0.34700
𝐾𝑖𝐶𝑁 2/3 𝐾𝑚𝐶𝑁 -0.5 0.5 𝑇𝑖𝐶𝑁 1/120 𝐾𝑣𝑑𝑖𝑑2 n/a -0.333 𝑇𝑎𝑖 0.1660 𝑔𝑎𝑚𝑟𝑒𝑓 n/a 0.38428
𝐾𝑣𝑑𝑖𝑑1 0.4400 𝐾𝑔2 n/a 0.6 𝐾𝑣𝑑𝑖𝑑 +0.7575 -0.7575 𝐾𝑔𝑖𝑑𝐶𝑁 n/a 0.11694 𝑇𝑣 0.0138 𝑜𝑓𝑓𝑔𝑎𝑚 n/a -0.42743
𝑝𝑎𝑟_𝑣𝑑_𝑟𝑒𝑓 550 𝑇𝑓_𝐼𝐷𝐶 0.004 0.0084 𝐾𝑣 -0.4000 𝑇𝑓_𝑉𝐷𝐶 0.004 0.0084
v𝑑_𝑜𝑓𝑓_𝐶𝑁 0.100 0.066 𝑇𝑓_𝑉𝐴𝐶 0.0333

𝑠𝑖𝑛(∗) 1
1 + 𝑠�𝑇𝑐𝑎𝑙𝑝ℎ𝑎𝑠𝑆�
𝑖𝑑_𝑟𝑒𝑓_𝑆
1
CONV_SYLMAR Sylmar Converter Controls
1𝐼𝑑𝑁𝑆
1𝐼𝑑𝑁𝑆
𝑐𝑜𝑠𝑐𝑡𝑙𝑎𝑛𝑔
÷ 𝐷𝑒𝑛
𝑁𝑢𝑚
4
𝑠𝑖𝑛(𝐴𝑙𝑓𝑎𝑁𝑜𝑚𝑆)
𝐿𝑖𝑛𝑀𝑎𝑥𝑆
𝐿𝑖𝑛𝑀𝑖𝑛𝑥𝑆
11 + 𝑠(𝑇𝑈𝑎𝑐𝑇𝑐𝑆)
0.5
7
Σ_
+
(𝐴𝑚𝑎𝑥𝑅𝐺𝑛𝑆)1 + 𝑠(𝑇𝐴𝑚𝑎𝑥𝑅𝑇𝐶𝑆)
𝐴𝑚𝑎𝑥𝑅𝑀𝑎𝑥𝑆
𝐴𝑚𝑎𝑥𝑅𝑀𝑖𝑛𝑆
8
÷ 𝑁𝑢𝑚
𝐷𝑒𝑛
Σ
(𝐺𝑎𝑚𝑅𝑒𝑓𝑆)
2(𝑑𝑥𝑁𝑆)
cos (∗)
+ _
_
𝑎𝑟𝑐𝑐𝑜𝑠(∗) +1
−1
�3√2𝜋
(𝑉𝑎𝑐𝑁𝑆)(𝑈𝑑𝑖𝑜𝑁𝑆)
𝒂𝒃𝒔( )(𝑻𝒐𝒕𝒂𝒍𝑻𝒂𝒑)�
3
+
_ Σ π Σ
𝐾𝑔1𝑆 Σ
Σ
Σ
𝐾𝑔2𝑆
𝐾𝑔0𝑆
𝐾0𝑆
+ +
+ +
+ +
+
+ + _ 𝐶𝐶𝐴𝑅𝑒𝑓 +
𝜋
Σ
𝑖𝑑_𝑚𝑎𝑟𝑔𝑖𝑛𝑆
_ +
(𝐾𝑖𝑆)𝑠
(∗)
(𝑇𝑐𝑓𝑠)𝑠
(∗) (∗)
𝑎𝑚𝑖𝑛_𝑐𝑐𝑎𝑆 𝑎𝑚𝑖𝑛_𝑐𝑐𝑎𝑆 𝑎𝑚𝑖𝑛_𝑐𝑐𝑎𝑆
Σ𝑐𝑜𝑠(∗)
𝑎𝑚𝑎𝑥_𝑐𝑐𝑎𝑆
Σ_ +
π 𝐾𝑝𝑆
6
5 +
+
𝐷𝐴𝑚𝑎𝑥( )
𝐷𝐴𝑚𝑎𝑥1
𝐷𝐴𝑚𝑎𝑥3 𝐷𝐴𝑚𝑎𝑥2
𝐴𝑚𝑎𝑥1 𝐴𝑚𝑎𝑥2 5
If DAmax2 > DAmax1 ignore DAmax2 and
interpolate between DAmax1 and DAmax3
𝐷𝐴𝑚𝑖𝑛( ) 5
𝐷𝐴𝑚𝑎𝑥( ) 5
𝑀𝐼𝑁
𝑎𝑚𝑎 𝑥𝑈𝐷𝐼𝑆
𝐹𝑙𝑎𝑔𝑁𝑆
𝐹𝑙𝑎𝑔𝑁𝑆
Purple represent sections only modeled for Sylmar-Celilo Flow
Green represents sections only modeled for Celilo-Sylmar flow
11 + 𝑠𝑇𝑓_𝑉𝐴𝐶
𝐼𝑑𝑐 1
1 + 𝑠𝑇𝑓_𝐼𝐷𝐶 1
𝑉𝑎𝑐 3
𝑉𝑑𝑐 1
1 + 𝑠𝑇𝑓_𝑉𝐷𝐶 2
𝐼𝑑𝑐𝑠𝑒𝑛𝑠𝑒
𝑉𝑎𝑐𝑠𝑒𝑛𝑠𝑒
𝑉𝑑𝑐𝑠𝑒𝑛𝑠𝑒
Specify similar 5 values to define the 𝐷𝐴𝑚𝑖𝑛( ) function
𝐾𝑚𝑆
(𝐺𝑎𝑚𝑀𝑖𝑛𝑆)
π
𝑎𝑙𝑓𝑎_𝑜𝑟𝑑𝑒𝑟

CONV_SYLMAR parameters are all hard-coded based on whether the initial flow direction of the PDCI. The parameters and the initialization are different for Celilo to Sylmar (North to South) or Sylmar to Celilo (South to North) flow. The following table shows the differences. Parameter Celilo-Sylmar
(North to South) Sylmar - Celilo (South to North)
Parameter Celilo-Sylmar (North to South)
Sylmar - Celilo (South to North)
𝑉𝑎𝑐𝑁𝑆 230.0 𝐾𝑖𝑆 180 π/200 𝑈𝑑𝑖𝑜𝑁𝑆 286.7 𝐾𝑝𝑆 20 π/180 𝑇𝑈𝑎𝑐𝑇𝑐𝑆 0.1 𝑇𝑐𝑎𝑙𝑝ℎ𝑎𝑠𝑆 0.003 𝐼𝑑𝑁𝑆 3100.0 𝐴𝑙𝑓𝑎𝑁𝑜𝑚𝑆 17.5 π/180
𝐺𝑎𝑚𝑀𝑖𝑛𝑆 15 π/180 𝐿𝑖𝑛𝑀𝑎𝑥𝑆 1.000 𝐺𝑎𝑚𝑅𝑒𝑓𝑆 17 π/180 𝐿𝑖𝑛𝑀𝑖𝑛𝑥𝑆 0.300 𝐾0𝑆 -0.018846501 π/180 𝑇𝑐𝑓𝑠 1000 𝐾𝑔0𝑆 0.0 π/180 𝐷𝐴𝑚𝑎𝑥1 10 π/180 90 π/180 𝐾𝑔1𝑆 -0.601288000 π/180 𝐷𝐴𝑚𝑎𝑥2 2 π/180 999 π/180 𝐾𝑔2𝑆 -0.029795800 π/180 𝐷𝐴𝑚𝑎𝑥3 1 π/180 5 π/180 𝑑𝑥𝑁𝑆 0.090 𝐴𝑚𝑎𝑥1 110 π/180 0 π/180
𝐴𝑚𝑎𝑥𝑅𝐺𝑛𝑆 0.150 n/a 𝐴𝑚𝑎𝑥2 140 π/180 120 π/180 𝑇𝐴𝑚𝑎𝑥𝑅𝑇𝐶𝑆 0.002 n/a 𝐷𝐴𝑚𝑖𝑛1 -5 π/180 -6 π/180
𝐴𝑚𝑎𝑥𝑅𝑀𝑎𝑥𝑆 0.050 n/a 𝐷𝐴𝑚𝑖𝑛2 -5 π/180 -8 π/180 𝐴𝑚𝑎𝑥𝑅𝑀𝑖𝑛𝑆 -0.050 n/a 𝐷𝐴𝑚𝑖𝑛3 -5 π/180 -15 π/180 𝑖𝑑_𝑚𝑎𝑟𝑔𝑖𝑛𝑆 0.03 0.00 𝐴𝑚𝑖𝑛1 0 π/180 35 π/180 𝑎𝑚𝑎𝑥𝑈𝐷𝐼𝑆 200 π/180 𝐴𝑚𝑖𝑛2 10 π/180 70 π/180 𝑎𝑚𝑖𝑛_𝑐𝑐𝑎𝑆 95 π/180 5 π/180 𝐶𝐶𝐴𝑅𝑒𝑓 Initialize so State
32 is at the upper limit
n/a 𝑇𝑓_𝐼𝐷𝐶 0.004 0.0084 𝑇𝑓_𝑉𝐷𝐶 0.004 0.0084 𝑇𝑓_𝑉𝐴𝐶 0.0333 𝐼𝑑𝑅𝑒𝑓𝐿𝑖𝑚𝑆 3100 𝐾𝑚𝐶𝑁 -1 1

Line Relay FACRI_SC
Fast AC Reactive Insertion for Series Capacitors (FACRI_SC)
MonitoredBus Busatwhichthevoltageismonitoredvolt_high Highcut‐involtage(pu)volt_low Lowcut‐involtage(pu)td_high Highcut‐intimedelay(sec)td_low Lowcut‐intimedelay(sec)ExtraObject1 Line1ExtraObject2 Line2ExtraObject3 Line3ExtraObject4 Line4ExtraObject5 Line5ExtraObject6 Line6ExtraObject7 Line7ExtraObject8 Interface1ExtraObject1through7canbespecifiedaslines,multi‐sectionlines,orinterfaces.
Thefollowingpseudocodedescribeshowtheinputsareusedtodetermineseriescapacitorswitching:SeriesCap=SeriescapacitortowhichthismodelisassignedLineSectionsAreOpen=AnylinesectionopenforExtraObject1to7CapBlocked=((Interface1MWFlow<‐50)OR(Interface1MWFlow>0))ANDLineSectionsAreOpenIf ((notCapBlocked)and(SeriesCap.Status=Bypassed)) AND
((MonitoredBusVoltage<volt_lowfortd_low)OR(MonitoredBusVoltage<volt_highfortd_high))ThenBegin
SeriesCap.Status=NotBypassedEnd

Line Relays LOCTI
Time Inverse Over-Current Relay
Relays are assigned to a specific end of a branch. This end is specified by the column Device Location which can be set to either From or To. It is specified on the branch dialog by checking the box Device is at From End of Line (otherwise at To End). The end specified by the Device Location is referred to as the "Relay End", while the other is referred to as the "Other End". When this relay's conditions are met, the entire branch is opened.
ModelSupportedbyPSLF
(m1*Threshold,t1*Tdm)
(m2*Threshold,t2*Tdm)
(m3*Threshold,t3*Tdm)
(m4*Threshold,t4*Tdm)
(m5*Threshold,t5*Tdm)
TimeToClose [seconds]
Current [pu]
Threshold Current
(Threshold,3600*Tdm)
Relay Operation The TimeToClose varies according to the piecewise linear function of per unit current as shown to the right and as specified by the input values Threshold, m1..m5, and t1..t5. If m1 is greater than 1.0, then an additional point at the Threshold current of 1 hour (3,600 seconds) is added to the curve. The time at which the relay will close is determined by integrating the following function. When the function equal 1.0 then the relay will close.
dt Relay Resetting When the current drops below the Threshold current, then the relay resets according to the parameter TReset. If TReset is zero, then the relay resets to 0 instantaneously. Otherwise there is a timed reset which occurs by integrating using the function
1 dt This function means that at zero current, it completely resets in TReset seconds. Monitor Flag If the monitor flag is 0, then the relay will create result events to indicate that lines would have tripped, but will not actually trip any lines. If monitor flag is not zero, then the relay will send a trip signal to the branch when to 1 and the branch will trip after the Breaker Time seconds have elapsed.

Line Relays OOSLEN
Rf
Rr
Ang
X [pu]
R [pu]
Wt
Out-of-step relay with 3 zones OOSLEN
Model supported by PSLF
Relays are assigned to a specific end of a branch. This end is specified by the column Device Location which can be set to either From or To. It is specified on the branch dialog by checking the box Device is at From End of Line (otherwise at To End). The end specified by the Device Location is referred to as the "Relay End", while the other is referred to as the "Other End". When this relay's conditions are met, only the Relay End of the branch is opened (determined by Device Location). However, the relay will determine if the line presently serves a radial system (i.e. the Nfar bus branch is already open). If a radial system is served, then all devices such as load or generation is also opened. Multiple OOSLEN relays can be assigned to the same end of a branch. In order to distinguish between them there is an extra key field called Device ID which must be specified for the OOSLEN. When loading from an auxiliary file, if this field is omitted, Simulator assumes value of "1".
Nf Nt Nfar
Lens Shape [Wt < Rf+Rr] Tomato Shape [Wt > Rf+Rr]
Circle Shape [Wt = Rf+Rr] AlsousedwhenWt=0
Rf
Rr
Ang
X [pu]
R [pu]
WtWt Rf
Rr
Ang
X [pu]
R [pu]
ParameterMeaningsAng = AngleWt = WidthTotalRf = RForwardRr = RReverse(Forbackwardreachspecifyapositivenumber)Note:InPSLF,theRrvaluesaregivenwiththeoppositesignforOOSLENandZLIN1only.SimulatorwillflipsignswhenreadingandwritingRrvaluesfromDYDfiles.
Otherfieldresultsincludesignalsassociatedwithaparticularzonewhichhavethefollowingmeanings.0:notpickedup(notinZone)1:Pickedup,nottimedout2:Pickedup,timeoutcomplete
Otherfieldresultsincludesignalsassociatedwithabreaker.Forbreachsignals,thevalueshavethefollowingmeanings.0:Tripnotinitiated1:Tripinitiated,CBtimerrunning2:Breakerhastripped

Line Relays OOSLNQ
Out-of-step relay with 3 zones OOSLNQ
ParameterMeaningsShape = 1meansRectangle 0meansCircle, Lens,orTomato Ang = AngleWt = WidthTotalWr = WidthRightRf = RForwardRr = RReverse(Forbackwardreachspecifyapositivenumber)
Rf
Rr
Ang
X [pu]
R [pu]
Wt
LensShape[Wt<Rf+Rr]TomatoShape[Wt>Rf+Rr]
CircleShape[Wt=Rf+Rr]AlsousedwhenWt=0
RectangularShape
Rf
Rr
Ang
X [pu]
R [pu]
Wt
Wr
Rf
Rr
Ang
X [pu]
R [pu]
WtWt Rf
Rr
Ang
X [pu]
R [pu]Nf Nt Nfar
Model supported by PSLF
Relaysareassignedtoaspecificendofabranch.ThisendisspecifiedbythecolumnDeviceLocationwhichcanbesettoeitherFromorTo.ItisspecifiedonthebranchdialogbycheckingtheboxDeviceisatFromEndofLine(otherwiseatToEnd).TheendspecifiedbytheDeviceLocationisreferredtoasthe"RelayEnd",whiletheotherisreferredtoasthe"OtherEnd".Whenthisrelay'sconditionsaremet,onlytheRelayEndofthebranchisopened(determinedbyDeviceLocation).However,therelaywilldetermineifthelinepresentlyservesaradialsystem(i.e.theNfarbusbranchisalreadyopen).Ifaradialsystemisserved,thenalldevicessuchasloadorgenerationisalsoopened.MultipleOOSLNQrelayscanbeassignedtothesameendofabranch.InordertodistinguishbetweenthemthereisanextrakeyfieldcalledDeviceIDwhichmustbespecifiedfortheOOSLEN.Whenloadingfromanauxiliaryfile,ifthisfieldisomitted,Simulatorassumesvalueof"1".
Otherfieldresultsincludesignalsassociatedwithaparticularzonewhichhavethefollowingmeanings.0:notpickedup(notinZone)1:Pickedup,nottimedout2:Pickedup,timeoutcomplete
Otherfieldresultsincludesignalsassociatedwithabreaker.Forbreachsignals,thevalueshavethefollowingmeanings.0:Tripnotinitiated1:Tripinitiated,CBtimerrunning2:Breakerhastripped

Line Relay SERIESCAPRELAY
Line Relay Model SERIESCAPRELAY
Tfilter Voltage filter time constant in sec. tbOn Switching time On in sec. tbOff Switching time Off in sec. V1On First voltage threshold for switching series capacitor ON in p.u. t1On First time delay for switching series capacitor ON in sec. V2On Second voltage threshold for switching series capacitor ON in p.u. t2On Second time delay for switching series capacitor ON in sec. V1Off First voltage threshold for switching series capacitor OFF in p.u. t1Off First time delay for switching series capacitor OFF in sec. V2Off Second voltage threshold for switching series capacitor OFF in p.u. t2Off Second time delay for switching series capacitor OFF in sec.

Line Relays TIOCR1
Time Inverse Over-Current Relay
Relays are assigned to a specific end of a branch. This end is specified by the column Device Location which can be set to either From or To. It is specified on the branch dialog by checking the box Device is at From End of Line (otherwise at To End). The end specified by the Device Location is referred to as the "Relay End", while the other is referred to as the "Other End". When this relay's conditions are met, the entire branch is opened.
ModelSupportedbyPSSE
(m1*Threshold,t1*Tdm)
(m2*Threshold,t2*Tdm)
(m3*Threshold,t3*Tdm)
(m4*Threshold,t4*Tdm)
(m5*Threshold,t5*Tdm)
TimeToClose [seconds]
Current [pu]
Threshold Current
(Threshold,3600*Tdm)
Relay Operation The TimeToClose varies according to the piecewise linear function of per unit current as shown to the right and as specified by the input values Threshold, m1..m5, and t1..t5. If m1 is greater than 1.0, then an additional point at the Threshold current of 1 hour (3,600 seconds) is added to the curve. The time at which the relay will close is determined by integrating the following function. When the function equal 1.0 then the relay will close.
dt Relay Resetting When the current drops below the Threshold current, then the relay resets according to the parameter TReset. If TReset is zero, then the relay resets to 0 instantaneously. Otherwise there is a timed reset which occurs by integrating using the function
1 dt This function means that at zero current, it completely resets in TReset seconds. Monitor Flag If the monitor flag is 0, then the relay will create result events to indicate that lines would have tripped, but will not actually trip any lines. If monitor flag is not zero, then the relay will send a trip signal to the branch when to 1 and the branch will trip after the Breaker Time seconds have elapsed.
Transfer Trip Trip signals for this relay may be sent to three different branches by pointing to branches for Transfer Trip 1, Transfer Trip 2, and Transfer Trip 3. In addition, a Transfer Trip Load record may also be pointed to with a corresponding parameter Load Shed % specifying what percentage of the load should be tripped.

Line Relays TLIN1
Under-voltage or Under-frequency Relay Tripping Line Circuit Breaker(s) TLIN1
Model supported by PSLF
Nf Nt Nfar
Relaysareassignedtoaspecificendofabranch.ThisendisspecifiedbythecolumnDeviceLocationwhichcanbesettoeitherFromorTo.ItisspecifiedonthebranchdialogbycheckingtheboxDeviceisatFromEndofLine(otherwiseatToEnd).TheendspecifiedbytheDeviceLocationisreferredtoasthe"RelayEnd",whiletheotherisreferredtoasthe"OtherEnd".Whenthisrelay'sconditionsaremet,thetrippingwhichoccursdependsontheFlagparameterasfollows0:OnlytheRelayEndofthebranchisopened(determinedbyDeviceLocation).
1:Bothendsofthebranchareopenedandthefarendbranchisalsoopened.
2:OnlytheRelayEndofthebranchisopened(determinedbyDeviceLocation).However,therelaywilldetermineifthelinepresentlyservesaradialsystem(i.e.theNfarbusbranchisalreadyopen).Ifaradialsystemisserved,thenalldevicessuchasloadorgenerationisalsoopened.
AnOtherFieldincludeasignalwhichhavethefollowingmeanings.0:notpickedup(notinZone)1:Pickedup,nottimedout2:Pickedup,timeoutcomplete3:CircuitBreakerTripComplete
ThevaluemonitoredbythisrelayisdeterminedbytheInputparameter.0:meansfrequencyinHz1:meansperunitvoltage
Thebusatwhichthisvalueismonitoredisspecifiedbysignalbus(SBus).Ifasignalbusisnotspecified,thentheRelayEndbuswillbeusedinstead.Therelayconditionismetifthemonitoredvaluefallsbelowthepickupvalue(V1)atleasttherelaydefinitetimesettings(T1).Whentherelayisconditionismetthetripwilloccurafterthecircuitbreakertimedelay(Tcb1)

Line Relays ZDCB
Relaysareassignedtoaspecificendofabranch.ThisendisspecifiedbythecolumnDeviceLocationwhichcanbesettoeitherFromorTo.ItisspecifiedonthebranchdialogbycheckingtheboxDeviceisatFromEndofLine(otherwiseatToEnd).TheendspecifiedbytheDeviceLocationisreferredtoasthe"RelayEnd",whiletheotherisreferredtoasthe"OtherEnd".ForZone1,theregionisthesameforbothendsofthebranchandeachendtripindependentlyiftheirZone1conditionsaremet.Forhigherzonetrippingtooccur,thenZone2conditionsmustbemetatoneendwhilesimultaneouslytheZone3conditionsattheotherendarenotmet.
Distance Relay with Directional Comparison Blocking (ZDCB)
Rf
Rr
Ang
X [pu]
R [pu]
Wt
LensShape[Wt<Rf+Rr]TomatoShape[Wt>Rf+Rr]
CircleShape[Wt=Rf+Rr]AlsousedwhenWt=0
RectangularShape
Rf
Rr
Ang
X [pu]
R [pu]
Wt
Wr
Rf
Rr
Ang
X [pu]
R [pu]
WtWt Rf
Rr
Ang
X [pu]
R [pu]Nf Nt Nfar
Model supported by PSLF
ParameterMeaningsShape = 1meansRectangle 0meansCircle, Lens,orTomato Ang = AngleWt = WidthTotalWr = WidthRightRf = RForwardRr = RReverse(Forbackwardreachspecifyapositivenumber)
Otherfieldresultsincludesignalsassociatedwithaparticularzonewhichhavethefollowingmeanings.0:notpickedup(notinZone)1:Pickedup,nottimedout2:Pickedup,timeoutcomplete
Otherfieldresultsincludesignalsassociatedwithabreaker.Forbreachsignals,thevalueshavethefollowingmeanings.0:Tripnotinitiated1:Tripinitiated,CBtimerrunning2:Breakerhastripped

Line Relays ZLIN1
Rf
Rr
Ang
X [pu]
R [pu]
Wt
Distance Relay with 3 zones (ZLIN1)
Model supported by PSLF
Nf Nt Nfar
LensShape[Wt<Rf+Rr]TomatoShape[Wt>Rf+Rr]
CircleShape[Wt=Rf+Rr]AlsousedwhenWt=0
Rf
Rr
Ang
X [pu]
R [pu]
WtWt Rf
Rr
Ang
X [pu]
R [pu]
ParameterMeaningsAng = AngleWt = WidthTotalRf = RForwardRr = RReverse(Forbackwardreachspecifyapositivenumber)Note:InPSLF,theRrvaluesaregivenwiththeoppositesignforOOSLENandZLIN1only.SimulatorwillflipsignswhenreadingandwritingRrvaluesfromDYDfiles.
Relaysareassignedtoaspecificendofabranch.ThisendisspecifiedbythecolumnDeviceLocationwhichcanbesettoeitherFromorTo.ItisspecifiedonthebranchdialogbycheckingtheboxDeviceisatFromEndofLine(otherwiseatToEnd).TheendspecifiedbytheDeviceLocationisreferredtoasthe"RelayEnd",whiletheotherisreferredtoasthe"OtherEnd".Whenthisrelay'sconditionsaremet,onlytheRelayEndofthebranchisopened(determinedbyDeviceLocation).However,therelaywilldetermineifthelinepresentlyservesaradialsystem(i.e.theNfarbusbranchisalreadyopen).Ifaradialsystemisserved,thenalldevicessuchasloadorgenerationisalsoopened.
Otherfieldresultsincludesignalsassociatedwithaparticularzonewhichhavethefollowingmeanings.0:notpickedup(notinZone)1:Pickedup,nottimedout2:Pickedup,timeoutcomplete
Otherfieldresultsincludesignalsassociatedwithabreaker.Forbreachsignals,thevalueshavethefollowingmeanings.0:Tripnotinitiated1:Tripinitiated,CBtimerrunning2:Breakerhastripped

Line Relays ZPOTT
Distance Relay with Permissive Overreaching Transfer Trip (ZPOTT)
Rf
Rr
Ang
X [pu]
R [pu]
Wt
LensShape[Wt<Rf+Rr]TomatoShape[Wt>Rf+Rr]
CircleShape[Wt=Rf+Rr]AlsousedwhenWt=0
RectangularShape
Rf
Rr
Ang
X [pu]
R [pu]
Wt
Wr
Rf
Rr
Ang
X [pu]
R [pu]
WtWt Rf
Rr
Ang
X [pu]
R [pu]Nf Nt Nfar
Model supported by PSLF
Relaysareassignedtoaspecificendofabranch.ThisendisspecifiedbythecolumnDeviceLocationwhichcanbesettoeitherFromorTo.ItisspecifiedonthebranchdialogbycheckingtheboxDeviceisatFromEndofLine(otherwiseatToEnd).TheendspecifiedbytheDeviceLocationisreferredtoasthe"RelayEnd",whiletheotherisreferredtoasthe"OtherEnd".ForZone1,theregionisthesameforbothendsofthebranchandeachendtripindependentlyiftheirZone1conditionsaremet.ForhigherZone2trippingtooccur,thenZone2conditionsmustbemetattheRelayandOtherendssimultaneously.
ParameterMeaningsShape = 1meansRectangle 0meansCircle, Lens,orTomato Ang = AngleWt = WidthTotalWr = WidthRightRf = RForwardRr = RReverse(Forbackwardreachspecifyapositivenumber)
Otherfieldresultsincludesignalsassociatedwithaparticularzonewhichhavethefollowingmeanings.0:notpickedup(notinZone)1:Pickedup,nottimedout2:Pickedup,timeoutcomplete
Otherfieldresultsincludesignalsassociatedwithabreaker.Forbreachsignals,thevalueshavethefollowingmeanings.0:Tripnotinitiated1:Tripinitiated,CBtimerrunning2:Breakerhastripped

Line Relays ZQLIN1
Distance Relay with 3 Zones (ZQLIN1)
Rf
Rr
Ang
X [pu]
R [pu]
Wt
LensShape[Wt<Rf+Rr]TomatoShape[Wt>Rf+Rr]
CircleShape[Wt=Rf+Rr]AlsousedwhenWt=0
RectangularShape
Rf
Rr
Ang
X [pu]
R [pu]
Wt
Wr
Rf
Rr
Ang
X [pu]
R [pu]
WtWt Rf
Rr
Ang
X [pu]
R [pu]Nf Nt Nfar
Model supported by PSLF
Relaysareassignedtoaspecificendofabranch.ThisendisspecifiedbythecolumnDeviceLocationwhichcanbesettoeitherFromorTo.ItisspecifiedonthebranchdialogbycheckingtheboxDeviceisatFromEndofLine(otherwiseatToEnd).TheendspecifiedbytheDeviceLocationisreferredtoasthe"RelayEnd",whiletheotherisreferredtoasthe"OtherEnd".Whenthisrelay'sconditionsaremet,onlytheRelayEndofthebranchisopened(determinedbyDeviceLocation).However,therelaywilldetermineifthelinepresentlyservesaradialsystem(i.e.theNfarbusbranchisalreadyopen).Ifaradialsystemisserved,thenalldevicessuchasloadorgenerationisalsoopened.
ParameterMeaningsShape = 1meansRectangle 0meansCircle, Lens,orTomato Ang = AngleWt = WidthTotalWr = WidthRightRf = RForwardRr = RReverse(Forbackwardreachspecifyapositivenumber)
Otherfieldresultsincludesignalsassociatedwithaparticularzonewhichhavethefollowingmeanings.0:notpickedup(notinZone)1:Pickedup,nottimedout2:Pickedup,timeoutcomplete
Otherfieldresultsincludesignalsassociatedwithabreaker.Forbreachsignals,thevalueshavethefollowingmeanings.0:Tripnotinitiated1:Tripinitiated,CBtimerrunning2:Breakerhastripped
angel
Text Box
LINERELAYMODEL_

Line Relays ZQLIN2
Distance Relay with 3 Zones (ZQLIN2)
Rf
Rr
Ang
X [pu]
R [pu]
Wt
LensShape[Wt<Rf+Rr]TomatoShape[Wt>Rf+Rr]
CircleShape[Wt=Rf+Rr]AlsousedwhenWt=0
RectangularShape
Rf
Rr
Ang
X [pu]
R [pu]
Wt
Wr
Rf
Rr
Ang
X [pu]
R [pu]
WtWt Rf
Rr
Ang
X [pu]
R [pu]
Model supported by PSLF
Relaysareassignedtoaspecificendofabranch.ThisendisspecifiedbythecolumnDeviceLocationwhichcanbesettoeitherFromorTo.ItisspecifiedonthebranchdialogbycheckingtheboxDeviceisatFromEndofLine(otherwiseatToEnd).TheendspecifiedbytheDeviceLocationisreferredtoasthe"RelayEnd",whiletheotherisreferredtoasthe"OtherEnd".Whenthisrelay'sconditionsaremet,onlytheRelayEndofthebranchisopened(determinedbyDeviceLocation).However,therelaywilldetermineifthelinepresentlyservesaradialsystem(i.e.theNfarbusbranchisalreadyopen).Ifaradialsystemisserved,thenalldevicessuchasloadorgenerationisalsoopened.
Nf Nt Nfar
ParameterMeaningsShape = 1meansRectangle 0meansCircle, Lens,orTomato Ang = AngleWt = WidthTotalWr = WidthRightRf = RForwardRr = RReverse(Forbackwardreachspecifyapositivenumber)
Otherfieldresultsincludesignalsassociatedwithaparticularzonewhichhavethefollowingmeanings.0:notpickedup(notinZone)1:Pickedup,nottimedout2:Pickedup,timeoutcomplete
Otherfieldresultsincludesignalsassociatedwithabreaker.Forbreachsignals,thevalueshavethefollowingmeanings.0:Tripnotinitiated1:Tripinitiated,CBtimerrunning2:Breakerhastripped

Load Characteristic BPA INDUCTION MOTOR I
Load Characteristic BPA Induction MotorI Induction Motor Load Model
S SR jX+
mjX
RjX
RRRs
= , MWST E
MECHANICALLOAD
2
2
Model Notes: Mechanical Load Torque, ( ) where C is calculated by the program such that 1.0 1
OT A B C T
A B C
ω ω
ω ωω ω
= + +
+ + == −
Model in the public domain, available from BPA

Load Characteristic BPA TYPE LA
Load Characteristic BPA Type LA Load Model
( )( )20 1 2 3 4 1 * DPP P PV PV P P f L= + + + + ∆
Model in the public domain, available from BPA

Load Characteristic BPA TYPE LB
Load Characteristic BPA Type LB Load Model
( )( )20 1 2 3 1 * DPP P PV PV P f L= + + + ∆
Model in the public domain, available from BPA

Load Characteristic CIM5
Load Characteristic CIM5 Induction Motor Load Model
Model supported by PSSE
A AR jX+
mjX1jX
1Rs
2jX
2Rs
Type 1
A AR jX+
mjX 1Rs
2jX
2Rs
Type 2
Impedances on Motor MVA Base
1jX
2 2
DL
Model Notes: 1. To model single cage motor: set R = X = 0.
2. When MBASE = 0.; motor MVA base = PMULT*MW load. When MBASE > 0.; motor MVA base = MBASE 3. Load Torque, T = T(1+ D ) 4. For mot
ω
nom 0
|
or starting, T=T is specified by the user in CON(J+18). For motor online studies, T=T is calculated in the code during initialization and stored in VAR(L+4). 5. V is the per unit vo
|
|
ltage level below which the relay to trip the motor will begin timing. To display relay, set V=0 6. T is the time in cycles for which the voltage must remain below the threshold for t Bhe relay to trip. T is the breaker delay time cycles.

Load Characteristic CIM6
Load Characteristic CIM6 Induction Motor Load Model
Model supported by PSSE
A AR jX+
mjX1jX
1Rs
2jX
2Rs
Type 1
A AR jX+
mjX 1Rs
2jX
2Rs
Type 2
Impedances on Motor MVA Base
( )
2 2
D2L 0
Model Notes: 1. To model single cage motor: set R = X = 0.
2. When MBASE = 0.; motor MVA base = PMULT*MW load. When MBASE > 0.; motor MVA base = MBASE
3. Load Torque, T = T A + B + C + D
4.
E
ω ω ω
nom 0
|
For motor starting, T=T is specified by the user in CON(J+22). For motor online studies, T=T is calculated in the code during initialization and stored in VAR(L+4). 5. V is the per
|
|
unit voltage level below which the relay to trip the motor will begin timing. To display relay, set V=0 6. T is the time in cycles for which the voltage must remain below the threshol Bd for the relay to trip. T is the breaker delay time cycles.
1jX

Load Characteristic CIMW
Load Characteristic CIMW Induction Motor Load Model
Model supported by PSSE
A AR jX+
mjX1jX
1Rs
2jX
2Rs
Type 1
A AR jX+
mjX 1Rs
2jX
2Rs
Type 2
Impedances on Motor MVA Base
( )
2 2
D2L 0
Model Notes: 1. To model single cage motor: set R = X = 0.
2. When MBASE = 0.; motor MVA base = PMULT*MW load. When MBASE > 0.; motor MVA base = MBASE
3. Load Torque, T = T A + B + C + D where C0E
ω ω ω 0 0
2
0
|
=1 A B D .
4. This model cannot be used formotor starting studies. T is calculated in the code during initialization and stored in VAR(L+4). 5. V is the per unit voltage
Eω ω ω− − −
|
|
level below which the relay to trip the motor will begin timing. To display relay, set V=0 6. T is the time in cycles for which the voltage must remain below the threshold for the rel Bay to trip. T is the breaker delay time cycles.
1jX

Load Characteristic CLOD
Load Characteristic CLOD Complex Load Model
Model supported by PSSE
P jQ+
Tap
O
R jXP+
Load MW input on system baseOP =
I
V
I
V
ConstantMVA 2
*
*
PKRO
RO
P P VQ Q V=
=
LargeMotors
SmallMotors
DischargeMotors
TransformerSaturation
RemainingLoads
M M

Load Characteristic CMPLD
Composite Load Model CMPLD
Model supported by PSLF
1st motor Polynomial load Psec + jQsec
2nd motor
Polynomial load Pfar + jQfar
Discrete Tap Change Control
V4 Vsec V3
r4 x4
Vsec_measured Vsec_init
i4 isec

Load Characteristic CMPLDW
Model supported by PSLF
Low Side Bus Rfdr, Xfdr
Load Bus
LTC Tfixhs Tfixls Tmin
Bss
Bf1 Bf2
Tdel Tdelstep Rcmp Xcmp
MVABase
Xxf
Transmission System Bus
Transmission System Bus
Transformer Control Tmax Step Vmin Vmax
Pinit + jQinit
Pinit + jQinit
DLIGHT Model
Fb
Bf1 = ( Fb )(Bf1+Bf2) Bf2 = (1-Fb)(Bf1+Bf2)
The internal model used by the transient stability numerical simulation structurally does the following.
1. Creates two buses called Low Side Bus and Load Bus 2. Creates a transformer between Transmission Bus and Low
Side Bus 3. Creates a capacitor at the Low Side Bus 4. Creates a branch between Low Side Bus and Load Bus 5. Moves the Load from the Transmission Bus to the Load Bus
PLS + jQLS Tap
IEEL Model
LD1PAC or MOTORX Model A
LD1PAC or MOTORX Model B
LD1PAC or MOTORX Model C
LD1PAC or MOTORX Model D

Load Characteristic CMPLDWNF This represents a load model identical to the CMPLDW model, except that all the parameters related to the Distribution Equivalent have been removed (the first 17 parameters of CMPLDW and the MVABase). Model supported by PowerWorld

Load Characteristic DISTRIBUTION EQUIVALENT TYPES This equivalent model and the parameters used for the Load Distribution Equivalent Types are the same as the first 17 parameters of the CMPLDW load characteristic model, along with an MVA base parameter. Model supported by PowerWorld

Load Characteristic DLIGHT
Load Characteristic Model DLIGHT
Model supported by PW
Real Power Coefficient Real Power Coefficient Reactive Power Coefficient Reactive Power Coefficient Breakpoint Voltage Breakpoint Voltage Extinction Voltage Extinction Voltage

Load Characteristic EXTL
Load Characteristic EXTL Complex Load Model
PKs
PMLTMX
PMLTMN
1
initialP−
+
Σπ
initialP
MULTPactualPQK
s
QMLTMX
QMLTMN
1
initialQ−
+
Σπ
initialQ
MULTQactualQ
States: 1 – PMULT 2 - QMULT

Load Characteristic IEEL
Load Characteristic IEEL Complex Load Model
Model supported by PSSE
( )( )
( )( )
31 2
5 64
1 2 3 7
4 5 6 8
1
1
nn nload
n nnload
P P a v a v a v a f
Q Q a v a v a v a f
= + + + ∆
= + + + ∆

Load Characteristic LD1PAC
Load Characteristic Model LD1PAC
Model supported by PSLF
Pul Fraction of constant power load TV Voltage input time in sec. Tf Frequency input time constant in sec. CompPF Compressor Power Factor Vstall Compressor Stalling Voltage in p.u. Rstall Compressor Stall resistance in p.u. Xstall Compressor Stall impedance in p.u. Tstall Compressor Stall delay time in sec. LFadj Vstall adjustment proportional lo loading
factor KP1 to KP2 Real power coefficient for running states,
p.u.P/p.u.V NP1 to NP2 Real power exponent for running states KQ1 to KQ2 Reactive power coefficient for running
states, p.u.Q/p.u. NQ1 to NQ2 Reactive power exponent for running states Vbrk Compressor motor breakdown voltage in
p.u Frst Restarting motor fraction Vrst Restart motor voltage in p.u. Trst Restarting time delay in sec. CmpKpf Real power frequency sensitivity,
p.u.P/p.u. CmpKqf Reactive power frequency sensitivity,
p.u.Q/p.u.
Vc1off Voltage 1 contactor disconnect load in p.u. Vc2off Voltage 2 contactor disconnect load in p.u. Vc1on Voltage 1 contactor re-connect load in p.u. Vc2on Voltage 2 contactor re-connect load in p.u. Tth Compressor heating time constant in sec. Th1t Compressor motors begin tripping Th2t Compressor motors finished tripping fuvr Fraction of compressor motors with
undervoltage relays uvtr1 to uvtr2 Undervoltage pickup level in p.u. ttr1 to ttr2 Undervoltage definite time in sec.

Load Characteristic LDFR
Load Characteristic LDFR Complex Load Model
Model supported by PSSE
m
OO
n
OO
r
p poO
s
q qoO
P P
Q Q
I I
I I
ωω
ωω
ωω
ωω
=
=
=
=

Load Characteristic LDRANDOM
Random Load Model LDRANDOM
Model supported by PSLF
The Random Load Model simulates a random load. The user needs to input the Percent of Standard Deviation to generate a random number; a Time for the filter and the Start time when the random load will start to be model. Once the random load model start internally it uses a filter and the generated random number to modify the load.

Load Characteristic MOTORW
Two-cage or One-cage Induction Machine for Part of a Bus Load Model MOTORW
Model supported by PSLF
�⬚ + -
�⬚ 1𝑇𝑝𝑝
�⬚ + E''q
-
- 1
𝑠
1𝑇𝑝𝑝𝑝
�⬚ +
+
1𝑠
d-axis
ωo SLIP TPO
E'q
ωo SLIP Lp-Lpp
Ls-Lp �⬚ +
+ id
-
+
�⬚ + + �⬚ 1
𝑇𝑝𝑝 �⬚ +
E''d
+
- 1
𝑠
1
𝑇𝑝𝑝𝑝 �⬚ +
+
1
𝑠
q-axis
ωo SLIP TPO
E'd
ωo SLIP
Lp-Lpp
Ls-Lp �⬚ -
+ Iq
-
-

Load Characteristic WSCC
Load Characteristic Model WSCC
Model supported by PSLF
p1 Constant impedance fraction in p.u. q1 Constant impedance fraction in p.u. p2 Constant current fraction in p.u. q2 Constant current fraction in p.u. p3 Constant power fraction in p.u. q3 Constant power fraction in p.u. p4 Frequency dependent power fraction in p.u. q4 Frequency dependent power fraction in p.u. lpd Real power frequency index in p.u. lqd Reactive power frequency index in p.u.

Load Relays DLSH
Rate of Frequency Load Shedding Model DLSH
Model supported by PSSE
f1 to f3 Frequency load shedding point t1 to t3 Pickup time Frac1 to frac3 Fraction of load to shed tb Breaker time df1 to df3 Rate of frequency shedding point

Load Relays LDS3
Underfrequency Load Shedding Model with Transfer Trip LDS3
Model supported by PSSE
Tran Trip Obj Transfer Trip Object SC Shed Shunts f1 to f5 Frequency load shedding point t1 to t5 Pickup time tb1 to tb5 Breaker time Frac1 to frac5 Fraction of load to shed ttb Transfer trip breaker time

Load Relays LDSH
Underfrequency Load Shedding Model LDSH
Model supported by PSSE
f1 to f3 Frequency load shedding point t1 to t3 Pickup time frac1 to frac3 Fraction of load to shed tb Breaker time

Load Relays LDST
Time Underfrequency Load Shedding Model LDST
Model supported by PSSE
f1 to f4 Frequency load shedding point z1 to z4 Nominal operating time tb Breaker time frac Fraction of load to shed freset Reset frequency tres Resetting time

Load Relays LSDT1
Shed (p.u.) Bus Frequency
Definite-Time Underfrequency Load Shedding Relay Model LSDT1
Model supported by PSLF
Tfilter Input transducer time constant tres Resetting time f1 to f3 Frequency load shedding point t1 to t3 Pickup time tb1 to tb3 Breaker time frac1 to frac3 Fraction of load to shed
Definite Time Characteristic

Load Relays LSDT2
Shed (p.u.) Bus Frequency
Definite-Time Undervoltage Load Shedding Relay Model LSDT2
Model supported by PSLF
Rem Bus Remote Bus Voltage Mode Voltage mode: 0 for deviation; 1 for absolute Tfilter Input transducer time constant tres Resetting time v1 to v3 Voltage load shedding point t1 to t3 Pickup time tb1 to tb3 Breaker time frac1 to frac3 Fraction of load to shed
Definite Time Characteristic

Load Relays LSDT8
Shed (p.u.) Bus Frequency
Definite-Time Underfrequency Load Shedding Relay Model LSDT8
Model supported by PSLF
Tfilter Input transducer time constant tres Resetting time f1 to f3 Frequency load shedding point t1 to t3 Pickup time tb1 to tb3 Breaker time frac1 to frac3 Fraction of load to shed df1 to df3 Rate of frequency shedding point
Definite Time Characteristic

Load Relays LSDT9
Shed (p.u.) Bus Frequency
Definite Time Underfrequency Load Shedding Relay Model LSDT9
Model supported by PSLF
Tfilter Input transducer time constant tres Resetting time f1 to f9 Frequency load shedding point t1 to t9 Pickup time tb1 to tb9 Breaker time frac1 to frac9 Fraction of load to shed
Definite Time Characteristic

Load Relays LVS3
Undervoltage Load Shedding Model with Transfer Trip LVS3
Model supported by PSSE
FirstTran Trip Obj First Transfer Trip Object SecondTran Trip Obj First Transfer Trip Object SC Shed Shunts v1 to v5 Voltage load shedding point t1 to t5 Pickup time tb1 to tb5 Breaker time Frac1 to frac5 Fraction of load to shed ttb1 to ttb2 Transfer trip breaker time

Load Relays LVSH
Undervoltage Load Shedding Model LVSH
Model supported by PSSE
v1 to v3 Voltage load shedding point t1 to t3 Pickup time frac1 to frac3 Fraction of load to shed tb Breaker time

Machine Model BPASVC No Block Diagram. Old BPA IPF program model.

Machine Model CBEST
EPRI Battery Energy Storage Model CBEST
Model supported by PSSE
States: 1 – VLL1 2 – VLL2 3 – IQ 4 – EnergyIn 5 - EnergyOut
𝑂𝑢𝑡𝐸𝑓𝑓𝑠
𝐼𝑛𝐸𝑓𝑓𝑠
Other SignalsVOTHSG
π
1
𝑉𝑚𝑎𝑥
(1 + 𝑠𝑇1)(1 + 𝑠𝑇2)(1 + 𝑠𝑇3)(1 + 𝑠𝑇4)
𝑉𝑚𝑖𝑛 2
3
−𝐼𝑄𝑚𝑎𝑥
𝐼𝑄𝑚𝑎𝑥 𝐾𝐴𝑉𝑅𝑠
𝑉𝑎𝑐
𝑀𝐵𝑎𝑠𝑒𝑆𝑏𝑎𝑠𝑒
∑
+
−
𝐷𝑟𝑜𝑜𝑝
−
𝑉𝑅𝐸𝐹
𝑉𝑐𝑜𝑚𝑝 𝑄𝑜𝑢𝑡
+ 𝐼𝑞
𝐼𝑄𝑚𝑎𝑥 = �𝐼𝑎𝑐𝑚𝑎𝑥2 − �𝑃𝑎𝑐𝑉𝑎𝑐
�2
4
𝑃𝑚𝑎𝑥
1
−𝑃𝑚𝑎𝑥
∑ 𝑀𝐵𝑎𝑠𝑒𝑆𝑏𝑎𝑠𝑒
𝐼𝑎𝑐𝑚𝑎𝑥𝑉𝑎𝑐
1
−𝐼𝑎𝑐𝑚𝑎𝑥𝑉𝑎𝑐
𝑀𝐵𝑎𝑠𝑒𝑆𝑏𝑎𝑠𝑒
𝑃𝑖𝑛𝑖𝑡
𝑃𝑎𝑐 𝑃𝐴𝑈𝑋 𝑃𝑜𝑢𝑡
+
+
5
∑
+
+
𝐸𝑜𝑢𝑡 𝑃𝑜𝑢𝑡
𝑃𝑜𝑢𝑡 > 0
𝑃𝑜𝑢𝑡 < 0

Machine Model CIMTR1
Model CIMTR1
Model supported by PSSE
Tp T' - Transient rotor time constant Tpp T'' – Sub-transient rotor time constant in sec. H Inertia constant in sec. X Synchronous reactance Xp X' – Transient Reactance Xpp X'' – Sub-transient Reactance Xl Stator leakage reactance in p.u. E1 Field voltage value E1 SE1 Saturation value at E1 E2 Field voltage value E2 SE2 Saturation value at E2 Switch Switch Ra Stator resistance in p.u.
States: 1 – Epr 2 – Epi 3 – Ekr 4 – Eki 5 – Speed wr

Machine Model CIMTR2
Induction Motor Model CIMTR2
Model supported by PSSE
Tp T' - Transient rotor time constant Tpp T'' – Sub-transient rotor time constant in sec. H Inertia constant in sec. X Synchronous reactance Xp X' – Transient Reactance Xpp X'' – Sub-transient Reactance Xl Stator leakage reactance in p.u. E1 Field voltage value E1 SE1 Saturation value at E1 E2 Field voltage value E2 SE2 Saturation value at E2 D Damping
States: 1 – Epr 2 – Epi 3 – Ekr 4 – Eki 5 – Speed wr

Machine Model CIMTR3
Induction Generator Model CIMTR3
Model supported by PSSE
Tp T' - Transient rotor time constant Tpp T'' – Sub-transient rotor time constant in sec. H Inertia constant in sec. X Synchronous reactance Xp X' – Transient Reactance Xpp X'' – Sub-transient Reactance Xl Stator leakage reactance in p.u. E1 Field voltage value E1 SE1 Saturation value at E1 E2 Field voltage value E2 Switch Switch SYN-POW Mechanical power at synchronous speed (p.u. > 0)
States: 1 – Epr 2 – Epi 3 – Ekr 4 – Eki 5 – Speed wr

Machine Model CIMTR4
Induction Motor Model CIMTR4
Model supported by PSSE
Tp T' - Transient rotor time constant Tpp T'' – Sub-transient rotor time constant in sec. H Inertia constant in sec. X Synchronous reactance Xp X' – Transient Reactance Xpp X'' – Sub-transient Reactance Xl Stator leakage reactance in p.u. E1 Field voltage value E1 SE1 Saturation value at E1 E2 Field voltage value E2 D Damping SYN-TOR Synchronous torque (p.u. < 0)
States: 1 – Epr 2 – Epi 3 – Ekr 4 – Eki 5 – Speed wr

Machine Model CSTATT
Static Condenser (STATCON) Model CSTATT
Model supported by PSSE
States: 1 – Regulator 1 2 – Regulator 2 3 – Thyristor
−
Other SignalsVOTHSG
+−
∑
1
𝑉𝑚𝑎𝑥
(1 + 𝑠𝑇1)(1 + 𝑠𝑇2)(1 + 𝑠𝑇3)(1 + 𝑠𝑇4)
𝑉𝑚𝑖𝑛 2
3
𝐿𝑖𝑚𝑖𝑡 𝑀𝑖𝑛
𝐿𝑖𝑚𝑖𝑡 𝑀𝑎𝑥
𝐾𝑠
𝐸𝑇
𝑀𝐵𝑎𝑠𝑒𝑆𝑏𝑎𝑠𝑒
∑
+
−
𝐷𝑟𝑜𝑜𝑝
−
1𝑋𝑡
𝑉𝑅𝐸𝐹
𝐿𝑖𝑚𝑖𝑡 𝑀𝑖𝑛 = 𝑉𝑇 − 𝑋𝑇𝐼𝐿𝑚𝑎𝑥0
𝑖𝑓 (𝑉𝑇 ≥ 𝑉𝑐𝑢𝑡𝑜𝑢𝑡) 𝑡ℎ𝑒𝑛 𝐼𝐿𝑚𝑎𝑥0 = 𝐼𝐿𝑚𝑎𝑥
𝑒𝑙𝑠𝑒 𝐼𝐿𝑚𝑎𝑥0 =𝐼𝐿𝑚𝑎𝑥𝑉𝑇𝑉𝑐𝑢𝑡𝑜𝑢𝑡
where
𝐿𝑖𝑚𝑖𝑡 𝑀𝑎𝑥 = 𝑉𝑇 + 𝑋𝑇𝐼𝐶𝑚𝑎𝑥0
𝑖𝑓 (𝑉𝑇 ≥ 𝑉𝑐𝑢𝑡𝑜𝑢𝑡) 𝑡ℎ𝑒𝑛 𝐼𝐶𝑚𝑎𝑥0 = 𝐼𝐶𝑚𝑎𝑥
𝑒𝑙𝑠𝑒 𝐼𝐶𝑚𝑎𝑥0 =𝐼𝐶𝑚𝑎𝑥𝑉𝑇𝑉𝑐𝑢𝑡𝑜𝑢𝑡
where
Also, 𝐿𝑖𝑚𝑖𝑡 𝑀𝑎𝑥 ≤ 𝐸𝑙𝑖𝑚𝑖𝑡
V is on the high-side of the generator step-up if integrated transformer step-up is included.
|𝑉|

Machine Model CSVGN1
Model supported by PSSE
Σ−
Machine Model CSVGN1 Static Shunt Compensator CSVGN1
+
5
11 sT+
1.
/MINR RBASE
Other SignalsVOTHSG
REFV−
V ( )( )( )( )
1 2
3 4
1 11 1
K sT sTsT sT+ ++ +
MAXV
MINV
π+
−
/BASEC SBASE
YΣ
/MBASE SBASE
RBASE MBASE= is the voltage magnitude on the high side of generator step-up transformer if present.VNote :
31 2
States: 1 – Regulator1 2 – Regulator2 3 – Thyristor

Machine Model CSVGN3
Model supported by PSSE
Σ−
Machine Model CSVGN3 Static Shunt Compensator CSVGN3
+
5
11 sT+
1.
π+
−
/MINR RBASE
Other SignalsVOTHSG
REFV−
/BASEC SBASE
YERRV
V ( )( )( )( )
1 2
3 4
1 11 1
K sT sTsT sT+ ++ +
MAXV
MINV
1, if / if
ERR OV
ERR OV
V VRMIN RBASE V V
>< −
Σ
/MBASE SBASE
RBASE MBASE= is the voltage magnitude on the high side of generator step-up transformer if present.VNote :
31 2
States: 1 – Regulator1 2 – Regulator2 3 – Thyristor

Machine Model CSVGN4
Model supported by PSSE
Σ−
Machine Model CSVGN4 Static Shunt Compensator CSVGN4
+
5
11 sT+
1.
π+
−
/MINR RBASE
Other SignalsVOTHSG
REFV−
/BASEC SBASE
YERRV
IBV ( )( )( )( )
1 2
3 4
1 11 1
K sT sTsT sT+ ++ +
MAXV
MINV
1, if / if
ERR OV
ERR OV
V VRMIN RBASE V V
>< −
Σ
/MBASE SBASE
RBASE MBASE=
31 2
States: 1 – Regulator1 2 – Regulator2 3 – Thyristor

Machine Model CSVGN5
Model supported by PSSE
Machine Model CSVGN5 Static Var Compensator CSVGN5
−
6
11 sT+
MAXB
MINB
( )VREF I
+VOLT(IBUS)
VOLT(ICON(M))or
EMAXV
EMAXV−
+
1
11 ssT+ Σ
+
( )VOTHSG I
Σ 2
3
11
S
S
sTsT
++
4
5
11
S
S
sTsT
++ SVSK
( )MBASE ISBASE ( )VAR L
( )' '
'
' '
If :If :
If :
ERR LO R MAX SD ERR
HI ERR LO R R
ERR HI R MIN
V DV B B K V DVDV V DV B B
V DV B B
> = + −< < =< =
ERRV RB
Fast Override
Thyristor Delay
'
'
If 0, /
/LO MAX SVS
HI MIN SVS
DVDV B KDV B K
=
=
=
If 0,
LO
HI
DVDV DVDV DV
>== −
Filter
Regulator1st Stage 2nd Stage
'R
B SVSB
31 2
States: 1 – Filter 2 – Regulator1 3 – Regulator2 4 – Thyristor
4

Machine Model CSVGN6
Model supported by PSSE
Machine Model CSVGN6 Static Var Compensator CSVGN6
−
6
11 sT+
MAXB
MINB
VREF
+VOLT(IBUS)
VOLT(ICON(M))or
+
1
11 ssT+ Σ
+
OtherSignals
( )VOTHSG I
Σ 2
3
11
S
S
sTsT
++
4
5
11
S
S
sTsT
++ SVSK
( )' '
'
' '
If :If :
If :
ERR LO R MAX SD ERR
HI ERR LO R R
ERR HI R MIN
V DV B B K V DVDV V DV B B
V DV B B
> = + −< < =< =
ERRV RB
Fast Override
Thyristor Delay
'
'
If 0, /
/LO MAX SVS
HI MIN SVS
DVDV B KDV B K
=
=
=
If 0,
LO
HI
DVDV DVDV DV
>== −
Filter
'R
B SVSB
MAXV
MINV
EMAXV
EMINV
++
Σ
Position 1 is normal (open)If 2, switch willclose after cycles.
ERRV DVTDELAY
>
1 2
BIAS
BSHUNT
+
RB
31 2
4States: 1 – Filter 2 – Regulator1 3 – Regulator2 4 – Thyristor

Machine Model GEN_BPA_MMG2 No block diagram. 2 state machine model (Angle, Speed, and constant Eqp) Machine Model GEN_BPA_MMG3 No block diagram. 3 state machine model (Angle, Speed, Eqp). Similar to GENTRA Machine Model GEN_BPA_MMG4 No block diagram. 4 state machine model (Angle, Speed, Eqp, Edp). Machine Model GEN_BPA_MMG5 No block diagram, but similar to GENSAL and GENSAE. 5 states (Angle, Speed, Eqp, Eqpp, Edpp). Machine Model GEN_BPA_MMG6 No block diagram, but similar to GENROU and GENROE. 6 states (Angle, Speed, Eqp, Eqpp, Edp, Edpp).

Machine Model GENCC
fdE+
−
Machine Model GENCC Generator represented by uniform inductance ratios rotor
modeling to match WSCC type F
−
+
−
'
1
dosT
'
' ''d d
d d
X XX X
−−
Model supported by PSLF
''
'd d
d d
X XX X
−−
' ''d dX X−
'qE '
qE''
1
dosTΣ
di
1EeS
q
d
XX
q axis
d axis
−Σ
π
States: 1 – Angle 2 – Speed w 3 – Eqp 4 – Eqpp 5 – Edp 6 - Edpp

Machine Model GENCLS_PLAYBACK
Machine Model GENCLS_PLAYBACK Synchronous machine represented by “classical” modeling or
Thevenin Voltage Source to play Back known voltage/frequency signal
Model supported by PSLF
RecordedVoltage
RespondingSystem0.03
on 100 MVA baseabZ =
A B
gencls
RespondingSystem
ppdI
B
RespondingSystem0.03
on 100 MVA baseabZ =
A Bgencls
ppdI
States: 1 – Angel 2 – Speed w

Machine Model GENDCO
Round Rotor Generator Model Including DC Offset Torque Component GENDCO
Model supported by PSSE
H Inertia constant in sec. D Damping Ra Stator resistance in p.u. Xd Xd – Direct axis synchronous reactance Xq Xq – Quadrature axis synchronous reactance Xdp X'd – Direct axis synchronous reactance Xqp X'q – Quadrature axis synchronous reactance Xl Stator leakage reactance in p.u. Tdop T'do – Open circuit direct axis transient time constant Tqop T'qo – Quadrature axis transient time constant Tdopp T''do – Open circuit direct axis subtransient time constant Tqopp T''qo – Quadrature axis subtransient time constant S(1.0) Saturation factor at 1.0 p.u. flux S(1.2) Saturation factor at 1.2 p.u. flux Ta Ta

Machine Model GENIND
States: 1 – Epr 2 – Epi 3 – Ekr 4 – Eki 5 – Speed wr
𝐿𝑚 𝑠𝑎𝑡′′ =
1𝐾𝑠𝑎𝑡 𝐿𝑚⁄ + 1 𝐿𝑙𝑟1⁄ + 1 𝐿𝑙𝑟2⁄
Ψmd
Ψmq
E''q = ψ'd
-E''d = ψ'q
Ψqr2
-
ids
Two Cage or One Cage Induction Generator Model GENIND
Model supported by PSLF
ψdr2
iqs
𝜔𝑜 ∙ 𝑅𝑟2𝐿𝑙𝑟2
� +
L''m sat
�
-
+
1𝐿𝑙𝑟2
ωo SLIP
Ψqr1
-
ψdr1
𝜔𝑜 ∙ 𝑅𝑟1
𝐿𝑙𝑟1 � + �
-
+ 1
𝐿𝑙𝑟1
ωo SLIP
�
+
+
Ψdr1
-
Ψqr1
𝜔𝑜 ∙ 𝑅𝑟1
𝐿𝑙𝑟1 � + �
+
+ 1
𝐿𝑙𝑟1
ωo SLIP
�
+
+
Ψdr2
-
Ψqr2
𝜔𝑜 ∙ 𝑅𝑟2
𝐿𝑙𝑟2 � + �
+
+ 1
𝐿𝑙𝑟2
ωo SLIP
�ψ𝑚𝑑2 + ψ𝑚𝑞
2 Se
Ψm
� L''m sat
L''m sat
L''m sat
�
-
-
+
+
Ksat = 1 + Se(ψm)
𝐿𝑚 = 𝐿𝑠 − 𝐿𝑙 𝐿𝑚′ = 1/(1/𝐿𝑚 + 1/𝐿𝑙𝑟1) = 𝐿′ − 𝐿𝑙 𝐿𝑚′′ = 1/(1/𝐿𝑚 + 1/𝐿𝑙𝑟1 + 1/𝐿𝑙𝑟2)
= 𝐿′′ − 𝐿𝑙 𝑇𝑜′ = 𝐿𝑙𝑟1 ∙ 𝐿𝑚/(𝜔𝑜 ∙ 𝑅𝑟1 ∙ 𝐿𝑚′ )
= (𝐿𝑙𝑟1 + 𝐿𝑚)/(𝜔𝑜 ∙ 𝑅𝑟1) 𝑇𝑜′′ = 𝐿𝑙𝑟2 ∙ 𝐿𝑚′ /(𝜔𝑜 ∙ 𝑅𝑟2 ∙ 𝐿𝑚′′ )
= (𝐿𝑙𝑟2 + 𝐿𝑚′ )/(𝜔𝑜 ∙ 𝑅𝑟2)

Machine Model GEPWTwoAxis
Model GENPWTwoAxis
Model supported by PW
H Inertia constant in sec. D Damping Ra Stator resistance in p.u. Xd Xd – Direct axis synchronous reactance Xq Xq – Quadrature axis synchronous reactance Xdp X'd – Direct axis synchronous reactance Xqp X'q – Quadrature axis synchronous reactance Tdop T'do – Open circuit direct axis transient time constant Tqop T'qo – Quadrature axis transient time constant
States: 1 – Angel 2 – Speed w 3 – Eqp 4 – Edp

Machine Model GENROE
Round Rotor Generator Model GENROEInduction Generator
Model supported by PSSE
Same as the GENROU model, except that an exponential function is used for saturation

Machine Model GENROU
fdE+
Machine Model GENROU Solid Rotor Generator represented by equal mutual
inductance rotor modeling
+
+'
1
dosT
''
'd l
d l
X XX X
−−
''dP
di
−
fdP
' ''
'd d
d l
X XX X
−− Σ
'd lX X−
+ ''
1
dosT−Σ
kdP−
+
+
+
'd dX X−
Σ
''dP
+
+
Σ
''P
''
( )q l
qd l
X XP
X X−
−
eS
Σ
' ''
'( )**2d d
d l
X XX X
−−
d AXIS−
ad fdL i
*** , q AXIS identical swapping d and q substripts−
Model supported by PSSE and PSLF
States: 1 – Angle 2 – Speed w 3 – Eqp 4 – PsiDp 5 – PsiQpp 6 – Edp

Machine Model GENSAE Same as the GENSAL model, except that an exponential function is used for saturation

Machine Model GENSAL
fdE+
Machine Model GENSAL Salient Pole Generator represented by equal mutual
inductance rotor modeling
+
+'
1
dosT
''
'd l
d l
X XX X
−−
''dP
di
−
fdP ' ''
'd d
d l
X XX X
−− Σ
'd lX X−
+ ''
1
dosT−Σ
kdP−
++
+
'd dX X−
Σ
+
+
Σ
' ''
'( )**2d d
d l
X XX X
−−
d AXIS−
ad fdL iΣ
''
1
qosT−Σ kdP−
''q qX X−
''qP
qiq AXIS−
e fdS P
Model supported by PSSE and PSLF
States: 1 – Angle 2 – Speed w 3 – Eqp 4 – PsiDp 5 – PsiQpp

Machine Model GENTPF
φ''d E''q E'q - +
Generator Represented by Uniform Inductance Ratios Rotor Modeling to Match WSCC Type F Model GENTPF
Model supported by PSLF
1𝑠𝑇𝑑𝑜′
� Se Efd
+ -
� -
+
Se 𝐿𝑑 − 𝐿𝑑′
𝐿𝑑′ − 𝐿𝑑′′
𝐿𝑑 − 𝐿𝑑′′
𝐿𝑑′ − 𝐿𝑑′′
1
𝑠𝑇𝑑𝑜′′
𝐿𝑑′ − 𝐿𝑑′′
id
States: 1 – Angle 2 – Spped w 3 – Eqp 4 – Eqpp 5 – Edp 6 – Edpp
𝑆𝑒 = 1 + 𝑆𝑎𝑡𝑢𝑟𝑎𝑡𝑖𝑜𝑛𝐹𝑢𝑛𝑐𝑡𝑖𝑜𝑛�𝜓𝑎𝑔�
𝑆𝑒 = 1 +𝑋𝑞𝑋𝑑
𝑆𝑎𝑡𝑢𝑟𝑎𝑡𝑖𝑜𝑛𝐹𝑢𝑛𝑐𝑡𝑖𝑜𝑛�𝜓𝑎𝑔�
Q-Axis Similar except:

Machine Model GENTPJ Same as the GENTPF model, except that the saturation function input is modeled with an extra term using the 𝐾𝑖𝑠 value as follows.
𝑆𝑒 = 1 + 𝑆𝑎𝑡𝑢𝑟𝑎𝑡𝑖𝑜𝑛𝐹𝑢𝑛𝑐𝑡𝑖𝑜𝑛�𝜓𝑎𝑔 + 𝐾𝑖𝑠𝐼𝑡 ∗ 𝑠𝑖𝑔𝑛(𝐼𝑑)�
𝑆𝑒 = 1 +𝑋𝑞𝑋𝑑
𝑆𝑎𝑡𝑢𝑟𝑎𝑡𝑖𝑜𝑛𝐹𝑢𝑛𝑐𝑡𝑖𝑜𝑛�𝜓𝑎𝑔 + 𝐾𝑖𝑠𝐼𝑡 ∗ 𝑠𝑖𝑔𝑛(𝐼𝑑)�
Q-Axis Similar except:

Machine Model GENTRA
fdE+
Machine Model GENTRA Salient Pole Generator without Amortisseur Windings
+
Model supported by PSLF
di
−
'dX
'd dX X−+
+
d AXIS−
ad fdL i
qX qiq AXIS−
eS
'
1
dosT Σ−
Σ
Σ
States: 1 – Angle 2 – Speed w 3 - Eqp

Machine Model GENWRI
MECHP+
−
Machine Model GENWRI Wound-rotor Induction Generator Model with Variable External
Rotor Resistance
−
+1
2Hs
Model supported by PSLF
rω slip0ω÷Σ
ELECP
Σ
Sf
( )( )
( )( )( )
( )( )
'0
'0
'
'0
'
'0
'
'
2
22 2
( )
( )
s l
s
fd d s dfd fq
fq q s qfq fd
d fd
q fq
L LR Tpo
L L
R TpoTR ex R
S L L islip
T
S L L islip
T
−=
−
=+
+ + −= − +
+ + −= − +
=
=
ω
ϕϕ ϕ
ϕϕ ϕ
ϕ ϕ
ϕ ϕ
( ) ( )( )( )( )
' '
' '
2 2' ' '
'
'
'
q s d d a q
d s q q a d
d q
e sat
d e d
q e d
e Li R i
e Li R i
S f
S S
S S
= − −
= − + −
= +
=
=
=
ω ϕ
ω ϕ
ϕ ϕ ϕ
ϕ
ϕ
ϕ
'0R2Tpo is a constant which is equal to T times
the total rotor resistance. R2 is the internal rotor resistance R2ex is the internal rotor resistance
States: 1 – Epr 2 – Epi 3 – Speed wr

Machine Model GEWTG
Machine Model GEWTG Generator/converter model for GE wind turbines –
Doubly Fed Asynchronous Generator (DFAG)
Model supported by PSLF
jLpp
States: 1 – Eq 2 – Ip 3 – Vmeas
𝑗𝐼𝑟𝑒𝑎𝑐
𝐼𝑟𝑒𝑎𝑙 +
−1𝑗𝐿𝑝𝑝
11 + 0.02𝑠
𝐼𝑃𝐶𝑀𝐷 1
0.02𝑠
rrpwr
𝐸𝑄𝐶𝑀𝐷
∑ +
_
11 + 0.02𝑠
VT
LVPL
2
Lvpl1
xerox brkpt V
1
3
if LPVLSW = 0 then ignore this limit
1
0.4 0.8
π
𝐼𝑃
∑
𝐼𝑞𝑒𝑥𝑡𝑟𝑎
𝑉𝑇 ≤ 1.2
𝐼𝑞𝑒𝑥𝑡𝑟𝑎 is calculated in network equations solution to enforce high voltage limit
VT
𝐼𝑄
Low Voltage Active Current Management
High Voltage Reactive Current Management
+ + Norton Equivalent Interface to network equations
EXWTGE Model
When fcflg = 0, this means a DFAG machine

Machine Model GEWTG Generator/converter model for GE wind turbines –
Full Converter (FC) Models
Model supported by PSLF
States: 1 – Eq 2 – Ip 3 – Vmeas
𝑗𝐼𝑟𝑒𝑎𝑐
𝐼𝑟𝑒𝑎𝑙 +
-1 11 + 0.02𝑠
𝐼𝑃𝐶𝑀𝐷 1
0.02𝑠
rrpwr
𝐸𝑄𝐶𝑀𝐷
∑ +
_
11 + 0.02𝑠
VT
LVPL
2
Lvpl1
xerox brkpt V
1
3
if LPVLSW = 0 then ignore this limit
1
0.4 0.8
π
𝐼𝑃
∑
𝐼𝑞𝑒𝑥𝑡𝑟𝑎
𝑉𝑇 ≤ 1.2
𝐼𝑞𝑒𝑥𝑡𝑟𝑎 is calculated in network equations solution to enforce high voltage limit
VT
𝐼𝑄
Low Voltage Active Current Management
High Voltage Reactive Current Management
+ + Norton Equivalent Interface to network equations
EWTFC Model
When fcflg = 1, this means a Full Converter machine

Machine Model InfiniteBusSignalGen This model extends the functionality of an infinite bus model. Of course in power system dynamics an infinite bus is characterized by a fixed voltage magnitude and frequency. This model makes it easy to change both the voltage magnitude and frequency, hence making it easy to see how other models in the system respond to frequency and voltage disturbances. Presently the model has the ability to do either unit step changes, ramp changes, or constant frequency sinusoidal changes. Up to five separate time segments (changes) can be modeled. The model dialog is shown as follows. It has two general fields (DoRamp and StartTime,Sec) and then five sets of five fields corresponding to each of the time segments. These fields are described below.

General Options
• DoRamp is an integer option that determines whether the non-sinusoidal changes should be discrete (DoRamp = 0) or ramping (DoRamp = 1). The default is zero.
• Start Time, Sec is the number of seconds before the first event occurs. The default is zero. Segment Fields The next five fields are associated with each time segment.
• Volt Delta(PU) : is the per unit magnitude of the voltage change to simulate. • Volt Freq(Hz) : is the frequency of the sinusoidal function to apply to the voltage disturbance. If this value is greater
than zero then the voltage disturbance is a sin function with a magnitude of VoltDeltaPU. Set this field to zero when simulating a unit step or ramp disturbance. The default is zero.
• Speed Delta (Hz) : is the magnitude of the speed (frequency) change to simulate. • Speed Freq(Hz) : is the frequency of the sinusoidal function to apply to the speed disturbance. • Duration (Sec) : is the duration of the event in seconds. Both the voltage and frequency events have the same
duration, with the usual expectation that either one or the other will be applied. If the duration value is negative then this event is ignored. A value of zero indicates the event continues until the end of the simulation (except when a zero is used with a ramp event the ramp is assumed to be a unit step).
These fields are then repeated for the next time segment. Up to five segments can be simulated. The changes are cumulative, so the value assumed at the beginning of the next segment is the value that existed at the end of the previous time segment. The model used is very similar to the PLAYINGEN model. As an example, consider four bus system shown in upper-left figure on the following page with the generator at bus 2 represented with an InfiniteBusSignalGen model. The signal generator is set to run flat for 1 seconds (Start Time,Sec = 1), then ramp the voltage up by 0.1 per unit over two seconds, ramp it back down over two seconds, hold flat for one second, then start a 0.1 per unit, 2 Hz oscillation until the end. This input data is shown in bottom-left figure on the next page with the results shown in upper-right. In the results figure the Blue line shows the infinite bus voltage (bus 2), while the red shows the terminal voltage for the other generator (bus 4). The middle-right figure shows a similar test with the generator frequency except the frequency of the change is dropped to 0.5 Hz. Again blue shows the generator 2 value, in this case speed, while red shows the generator 4 speed. When the frequency of the infinite bus speed variation approaches the natural frequency of the bus 4 generator (about 1.8 Hz, calculated through single machine infinite bus analysis), resonance can be seen to occur. This is shown in lower-right figure; note now the input frequency has a magnitude of just 0.1 Hz and the simulation has been extended to twenty seconds.

Infinite Bus
slack
Bus 1 Bus 2
Bus 3
0.00 Deg 6.58 Deg
Bus 4
11.57 Deg
4.45 Deg 1.000 pu 1.030 pu 1.048 pu
1.097 pu
Term. PU_Gen Bus 2 #1 Term. PU_Gen Bus 4 #1
109876543210
1.141.131.121.111.1
1.091.081.071.061.051.041.031.021.01
10.990.980.970.960.950.940.930.920.910.9
Speed, Gen Bus 2 #1 Speed, Gen Bus 4 #1
109876543210
61.361.261.1
6160.960.860.760.660.560.460.360.260.1
6059.959.859.759.659.559.459.359.259.1
5958.9
Speed_Gen Bus 2 #1 Speed_Gen Bus 4 #1
20191817161514131211109876543210
61
60.9
60.8
60.7
60.6
60.5
60.4
60.3
60.2
60.1
60
59.9
59.8
59.7
59.6
59.5
59.4
59.3

Machine Model MOTOR1
Machine Model MOTOR1 “Two-cage” or “one-cage” induction machine
Model supported by PSLF
1
1
o r
lr
RLω
oSLIPω1drψ
Σ1
1.
lrL
+
−+
+1qrψ
2
2
o r
lr
RLω
oSLIPω
Σ
2drψ
Σ2
1.
lrL
+
−+
−2qrψ
'' m satLΣ
+
+
'' ''d qE ψ− =
'' m satL qsi
Σ
eS
mψ
1. ( )sat e mK S ψ= +
''
1 2
1./ 1. / 1. /m sat
sat m lr lr
LK L L L
=+ +
Σ
2
2
o r
lr
RLω
oSLIPω2qrψ
Σ2
1.
lrL
+
−+
+2drψ
1
1
o r
lr
RLω
oSLIPω
Σ Σ1
1.
lrL
+
−+
+1drψ
Σ
1qrψ
'' m satL
+
+ Σ
+
−
2 2md mqψ ψ+
'' m satL dsi
−Σ+
'' ''q dE ψ=
' '1
'' ''1 2
' '1 1 1 1
'' ' '' '2 2 2 2
1. / (1. / 1. / )
1. / (1. / 1. / 1. / )
/ ( ) ( ) / ( )
/ ( ) ( ) / ( )
m s l
m m lr l
m m lr lr l
o lr m o r m lr m o r
o lr m o r m lr m o r
L L LL L L L LL L L L L LT L L R L L L RT L L R L L L R
ω ω
ω ω
= −
= + = −
= + + = −
= = +
= = +
mqψ
mdψ
States: 1 – Epr 2 – Epi 3 – Ekr 4 - Eki 5 – Speed wr

Machine Model PLAYINGEN
Playin Signals
States: 1 – Frequency [per unit] 2 – Voltage [per unit] 3 – Delta [radians]
𝑤𝑏𝑎𝑠𝑒
𝑠 ∑
11 + 𝑠𝑇𝐹𝐼𝑛𝑑𝑒𝑥
Playin Signals
11 + 𝑠𝑇𝑉𝐼𝑛𝑑𝑒𝑥
Value[Vindex]
Value[Findex]
𝑒𝑗𝐷𝑒𝑙𝑡𝑎
1.0
+
𝑉
𝐷𝑒𝑙𝑡𝑎 [radians]
𝑉 [𝑝𝑢]
1 3
+
Thevenin Equivalent Interface to network equations
2
𝑅𝑡ℎ + 𝑗𝑋𝑡ℎ
_
Playin Signal Generator (PLAYINGEN)

Machine Model STCON
Vt∠ ∥θ
Static Synchronous Condenser Model STCON
Model supported by PSLF
qset
qterm
� -
UMIN = S3
UMAX = S2
UMIN
UMAX + +
VMIN
VMAX �
Vctr
11 + 𝑠𝑇𝑓
𝐾𝑖𝑠
Kp
iterm
𝐾𝑖𝑞𝑠
R
�
Vref
+
Vsig + +
+
� -
+
Vint π
If S4 > Imax +
𝐾𝑖𝑙𝑠
�
𝐾𝑖𝑙𝑠
-
� Vmax
+
If S4 < (Imax - Imxeps) and
vterm > vthresh
-
If qterm ≥ 0
If qterm ≤ 0
If S4 > Imax +
𝐾𝑖𝑙𝑠
�
𝐾𝑖𝑙𝑠
-
� Vmin
+
If S4 < (Imax - Imxeps) and
vterm > vthresh
-
𝐾𝑖𝑙𝑠
-
� Vmin
+
𝐾𝑖𝑙𝑠
-
� Vmax
+
iterm, qterm pterm = 0
Vint∠ ∥θ
1
1 + 𝑠𝑇𝑓
|iterm|
Xt
2
1
2
2
2
3
States: 1 – Vsens 2 – Integrator 3 – Umax 4 – Umin 5 – ItermSens 6 – Qerr
2
4 2
5
2
6
2
3
2
4
2
3
2
4
2
5
2
5
2
5
2
5
2
5
2
5

Machine Model SVCWSC
Static Var Device Model SVCWSC
Model supported by PSLF
� -
-
+
BMIN
BMAX
� Vbus �
Vref
Vscs + Vs
+ + +
Bsvs
π
1 + 𝑠𝑇𝐶1 + 𝑠𝑇𝑠1
1 + 𝑠𝑇𝑠2
1 + 𝑠𝑇𝑠3
1 + 𝑠𝑇𝑠4
𝑏 + 𝑠𝑇𝑠5
1
1 + 𝑠𝑇𝑠6
XC
KSVS
Vs (from external PSS)
VeMIN
VeMAX
V1MIN
V1MAX
Kvc·V2MIN
Kvc·V2MAX Fast Over Ride
If Vbus < V1vd, Kvc = 0. If Vbus > V2vd for Tdvcl sec., Kvc = 1.
Voltage Clamp Logic
𝐾𝑠1
1 + 𝑠𝑇𝑠7
1 + 𝑠𝑇𝑠8
1 + 𝑠𝑇𝑠9
𝐾𝑠2
1 + 𝑠𝑇𝑠10
1 + 𝑠𝑇𝑠11
1 + 𝑠𝑇𝑠12
�
+
+
KS3 𝑠𝑇𝑠13
1 + 𝑠𝑇𝑠14
Input 1
Input 2 VscsMIN
VscsMAX
Vscs
2
1 2
2 2
3 2
4
2
5 2
6
2
7
2
9
2
8
States: 1 – LLVbus 2 – Regulator1 3 – Regulator2 4 – Thyristor 5 – Transducer1 6 – LL1 7 – Transducer2 8 - LL2 9 – WO13

Machine Model VWSCC
Static Var Device Model VWSCC
Model supported by PSLF
� -
-
+
BMIN
BMAX
� Vbus �
Vref
Vscs + +
+ Bsvs
π
1 + 𝑠𝑇𝐶1 + 𝑠𝑇𝑠1
𝐴 + 𝑠𝑇𝑠2
𝐵 + 𝑠𝑇𝑠3
1 + 𝑠𝑇𝑠4
1 + 𝑠𝑇𝑠5
1
1 + 𝑠𝑇𝑠6
XC
KSVS
(from Stabilizer)
VeMIN
VeMAX
Fast Over Ride e-sTd1
2
1 2
2 2
3
States: 1 – LLVBus 2 – Regulator1 3 – Regulator2 4 – Thyristor
2
4

Machine Model WT1G
𝐿𝑚 𝑠𝑎𝑡′′ =
1𝐾𝑠𝑎𝑡 𝐿𝑚⁄ + 1 𝐿𝑙𝑟1⁄ + 1 𝐿𝑙𝑟2⁄
Ψmd
Ψmq
E''q = ψ'd
-E''d = ψ'q
Ψqr2
-
ids
Generator Model for Generic Type-1 Wind Turbines WT1G
Model supported by PSLF
ψdr2
iqs
𝜔𝑜 ∙ 𝑅𝑟2𝐿𝑙𝑟2
� +
L''m sat
�
-
+
1𝐿𝑙𝑟2
ωo SLIP
Ψqr1
-
ψdr1
𝜔𝑜 ∙ 𝑅𝑟1
𝐿𝑙𝑟1 � + �
-
+ 1
𝐿𝑙𝑟1
ωo SLIP
�
+
+
Ψdr1
-
Ψqr1
𝜔𝑜 ∙ 𝑅𝑟1
𝐿𝑙𝑟1 � + �
+
+ 1
𝐿𝑙𝑟1
ωo SLIP
�
+
+
Ψdr2
-
Ψqr2
𝜔𝑜 ∙ 𝑅𝑟2
𝐿𝑙𝑟2 � + �
+
+ 1
𝐿𝑙𝑟2
ωo SLIP
�ψ𝑚𝑑2 + ψ𝑚𝑞
2 Se
Ψm
� L''m sat
L''m sat
L''m sat
�
-
-
+
+
Ksat = 1 + Se(ψm)
𝐿𝑚 = 𝐿𝑠 − 𝐿𝑙 𝐿𝑚′ = 1/(1/𝐿𝑚 + 1/𝐿𝑙𝑟1) = 𝐿′ − 𝐿𝑙 𝐿𝑚′′ = 1/(1/𝐿𝑚 + 1/𝐿𝑙𝑟1 + 1/𝐿𝑙𝑟2)
= 𝐿′′ − 𝐿𝑙 𝑇𝑜′ = 𝐿𝑙𝑟1 ∙ 𝐿𝑚/(𝜔𝑜 ∙ 𝑅𝑟1 ∙ 𝐿𝑚′ )
= (𝐿𝑙𝑟1 + 𝐿𝑚)/(𝜔𝑜 ∙ 𝑅𝑟1) 𝑇𝑜′′ = 𝐿𝑙𝑟2 ∙ 𝐿𝑚′ /(𝜔𝑜 ∙ 𝑅𝑟2 ∙ 𝐿𝑚′′ )
= (𝐿𝑙𝑟2 + 𝐿𝑚′ )/(𝜔𝑜 ∙ 𝑅𝑟2)
States: 1 – Epr 2 – Epi 3 – Ekr 4 – Eki

Machine Model WT1G1
Direct Connected Type 1 Generator Model WT1G1
Model supported by PSSE
Tpo T' – Open circuit transient rotor time constant Tppo T'' – Open circuit sub-transient rotor time constant in sec. Ls Synchronous reactance Lp L' – Transient Reactance Lpp L'' – Sub-transient Reactance Ll Stator leakage reactance (p.u. > 0) E1 Field voltage value E1 SE1 Saturation value at E1 E2 Field voltage value E2 SE2 Saturation value at E2
States: 1 – Epr 2 – Epi 3 – Ekr 4 – Eki

Machine Model WT2G
Model WT2G
Model supported by PSLF
Ls Synchronous reactance, (p.u. > 0) Lp Transient reactance, (p.u. > 0) Ll Stator leakage reactance, (p.u. > 0) Ra Stator resistance in p.u. Tpo Transient rotor time constant in sec. S(1.0) Saturation factor at 1.0 p.u. flux S(1.2) Saturation factor at 1.2 p.u. flux spdrot Initial electrical rotor speed, p.u. of system frequency Accel Factor Acceleration factor
States:
1 – Epr 2 – Epi 3 – Ekr 4 – Eki

Machine Model WT2G1
Induction Generator with Controlled External Rotor Resistor Type 2 Model WT2G1
Model supported by PSSE
Xa Stator reactance Xm Magnetizing reactance X1 Rotor reactance R_Rot_Mach Rotor resistance R_Rot_Max Sum of R_Rot_Mach and total external resistance E1 Field voltage value E1 SE1 Saturation value at E1 E2 Field voltage value E2 SE2 Saturation value at E2 Power_Ref1 to Power_Ref_5 Coordinate pairs of the power-slip curve Slip_1 to Slip_5 Power-Slip
States:
1 – Epr 2 – Epi 3 – Ekr 4 – Eki
Note: The Power_Ref and Slip values specified here are actually used in conjunction with the WT2E1 model

Machine Model WT3G
Generator/converter Model for Type-3 (Double-Fed) Wind Turbines WT3G
Model supported by PSLF
jLpp
−1𝑗𝐿𝑝𝑝
States: 1 – Eq 2 – Ip 3 – Vmeas
𝑗𝐼𝑟𝑒𝑎𝑐
𝐼𝑟𝑒𝑎𝑙 +
11 + 𝑠𝑇𝑑
𝐼𝑃𝐶𝑀𝐷 1𝑠𝑇𝑑
rrpwr
𝐸𝑄𝐶𝑀𝐷
∑ +
_
11 + 𝑠𝑇𝐿𝑉𝑃𝐿
VT
LVPL
2
Lvpl1
xerox brkpt V
1
3
if LPVLSW = 0 then ignore this limit
1
Lvpnt0 Lvpnt1
π
𝐼𝑃
∑
𝐼𝑞𝑒𝑥𝑡𝑟𝑎
𝑉𝑇 ≤ 𝑉𝑙𝑖𝑚
𝐼𝑞𝑒𝑥𝑡𝑟𝑎 is calculated in network equations solution to enforce high voltage limit
VT
𝐼𝑄
Low Voltage Active Current Management
High Voltage Reactive Current Management
+ + Norton Equivalent Interface to network equations
WT3E Model

Machine Model WT3G1
Double-Fed Induction Generator (Type 3) Model WT3G1
Model supported by PSEE
𝐼�̅�𝑜𝑟𝑐
Vterm∠ θ
1
1 + 0.02𝑠
−1
𝑋𝑒𝑞
T
1
1 + 0.02𝑠
Eq cmd
(efd) From Converter Control
IP cmd
Eq
IP
IYinj
IXinj
jX''
�
-Pllmax
Pllmax
𝐾𝑝𝑙𝑙𝜔𝑜
𝐾𝑖𝑝𝑙𝑙𝑠
+ T
-1
𝜔𝑜
𝑠
-Pllmax
Pllmax
𝑉�𝑡𝑒𝑟𝑚
VX
δ +
Notes: 1. 𝑉�𝑡𝑒𝑟𝑚 and 𝐼�̅�𝑜𝑟𝑐 are complex values on network reference frame. 2. In steady-state, V
Y = 0, V
X = V
term, and δ = θ.
3. Xeq
= Imaginary (ZSOURCE)
VY
2
1
2
2
2
3
States: 1 – Eq 2 – Iq 3 – Vmeas 4 – PLL1 5 – Delta
2
4
2
5

Machine Model WT3G2
Double-Fed Induction Generator (Type 3) Model WT3G2
Model supported by PSEE
𝐼�̅�𝑜𝑟𝑐 −1
𝑋𝑒𝑞
T
1
1 + 𝑠𝑇𝑖𝑞𝑐𝑚𝑑
WIPCMD
� PLLMIN
PLLMAX
𝐾𝑃𝐿𝐿𝜔𝑜
𝐾𝐼𝑃𝐿𝐿𝑠
+ T
-1
𝜔𝑜
𝑠
PLLMIN
PLLMAX
VX
+
VY
Angle of VT If KPLL = 0 and KIPLL = 0
1
𝑠𝑇𝑖𝑝𝑐𝑚𝑑
Rip_LVPL LVPL
WEPCMD
� +
-
High Voltage Reactive Current
Logic
Low Voltage Reactive Current
Logic
1
1 + 𝑠𝑇_𝐿𝑉𝑃𝐿
VT
VT LVPL
GLVPL
VLVPL1 VLVPL2 V
LVPL
States: 1 – Eq 2 – Iq 3 – Vmeas 4 – PLL1 5 – Delta
2
1
2
2
3
2
4
2
5

Machine Model WT4G
Model WT4G Type 4 Wind Turbine with Full Converter Model
Model supported by PSLF
States: 1 – Eq 2 – Ip 3 – Vmeas
𝑗𝐼𝑟𝑒𝑎𝑐
𝐼𝑟𝑒𝑎𝑙 +
-1 11 + 𝑠𝑇𝑑
𝐼𝑃𝐶𝑀𝐷 1𝑠𝑇𝑑
rrpwr
𝐸𝑄𝐶𝑀𝐷
∑ +
_
11 + 𝑠𝑇𝐿𝑉𝑃𝐿
VT
LVPL
2
Lvpl1
xerox brkpt V
1
3
if LPVLSW = 0 then ignore this limit
1
Lvpnt0 Lvpnt1
π
𝐼𝑃
∑
𝐼𝑞𝑒𝑥𝑡𝑟𝑎
𝑉𝑇 ≤ 𝑉𝑙𝑖𝑚
𝐼𝑞𝑒𝑥𝑡𝑟𝑎 is calculated in network equations solution to enforce high voltage limit
VT
𝐼𝑄
Low Voltage Active Current Management
High Voltage Reactive Current Management
+ + Norton Equivalent Interface to network equations
WT4E Model

Machine Model WT4G1
Wind Generator Model with Power Converter WT4G1
Model supported by PSEE
𝐼�̅�𝑜𝑟𝑐 1
1 + 𝑠𝑇𝑒𝑞𝑐𝑚𝑑
WIPCMD 1
𝑠𝑇𝑖𝑝𝑐𝑚𝑑
Rip_LVPL LVPL
WEPCMD
� +
-
High Voltage Reactive Current
Logic
Low Voltage Reactive Current
Logic
1
1 + 𝑠𝑇_𝐿𝑉𝑃𝐿
VT LVPL
GLVPL
VLVPL1 VLVPL2 V
LVPL
2
1
2
2
2
3
States: 1 – Eq 2 – Iq 3 – Vmeas

Stabilizer BPA SF, BPA SP, BPA SS, and BPA SG
Stabilizer BPA SF, BPA SP, BPA SS, and BPA SG Stabilizer Models
−
+
QV
QV
K1+sT
QS
QS
K1+sT
Q
Q
sT1+sT
'Q2
Q2
1+sT1+sT
'Q1
Q1
1+sT1+sT
T TO TV =V V−
SHAFT SLIP, FREQ. OR
ACCEL. POWER∆
'Q3
Q3
1+sT1+sT
'CUTOFF S S
CUTOFF'
S S T CUTOFF
S T CUTOFF
T TO T
If V 0.0, then V =VIf V >0.0, then
V =V if V V
V =0.0 if V >V V =V V
≤
∆ ≤
∆
∆ −
STV
Model in the public domain, available from BPA
SMAXV
SMINV
ΣQSKtse+
ZERO
'SV
TV∆
CHOICE OFINPUT SIGNALS
QS
QV
Q
Q1
Q2
Q3
1 - K2 - K3 - T4 - T5 - T6 - T
States
1
2
3 4 5 6

Stabilizer BPA SH, BPA SHPLUS, and BPA SI
Stabilizer BPA SH, BPA SHPLUS, and BPA SI Stabilizer Models
No block diagrams have been created

Stabilizer IEE2ST
Stabilizer IEE2ST IEEE Stabilizing Model with Dual-Input Signals
+
+Σ
1
1
K1+sT
2
2
K1+sT
3
4
sT1+sT
7
8
1+sT1+sT
9
10
1+sT1+sT
SMINL
SMAXLS SS CU CT CL
S CT CL
S CT CU
V = V if (V > V > V )V = 0 if (V < V )V = 0 if (V > V )
5
6
1+sT1+sT
SSV
Output Limiter
Input Signal #1
Input Signal #2
STV
Model supported by PSSE
1
2
3 4 5
6
1 - Transducer12 - Transducer23 - Washout4 - LL15 - LL26 - Unlimited Signal
States

Stabilizer IEEEST
Stabilizer IEEEST IEEE Stabilizing Model
3
4
1+sT1+sT
5S
6
sTK1+sT
SMINL
SMAXLS SS CU CT CL
S CT CL
S CT CU
V = V if (V > V > V )V = 0 if (V < V )V = 0 if (V > V )
1
2
1+sT1+sT
SSV
Output Limiter
Input Signal2
5 62 2
1 2 3 4
1+A s+A s(1+A s+A s )(1+A s+A s )
Filter
Model supported by PSLF with time delay that is not implemented in SimulatorModel supported by PSSE
STV
1 2 3 4 5 6
1 - Filter 12 - Filter 23 - Filter 34 - Filter Out5 - LL16 - LL27 - Unlimited Signal
States
7

Stabilizer PFQRG
Stabilizer PFQRG Power-Sensitive Stabilizing Unit
-MAX
MAX+
+Σ I
PKKs
+
Model supported by PSLF
STV
ReactivePower
PowerFactor
J=1
J=0
Reference Signal,Reactive power or Power Factor
To VoltageRegulator
SupplementarySignal
1
1 - PIStates

Stabilizer PSS1A
Stabilizer PSS1A Single-Input Stabilizer Model
5S
6
sTK1+sT
SMINL
SMAXL
Output Limiter
Input Signal
Filter
Model supported by PSLF with time delay that is not implemented in SimulatorModel supported by PSSE
STV1
2
1+sT1+sT
3
4
1+sT1+sT
11 + sT6
1
1 + A1s+A2s2
If (Vcu and (Vct > Vcu)) VST = 0.0 If (Vcl and (Vct < Vcu)) VST = 0.0 Else VST = Vllout
Vllout

Stabilizer PSS2A
Stabilizer PSS2A IEEE Dual-Input Stabilizer Model
+
+
Σ
STMINV
STMAXV
Input Signal #2
W1
W1
sT1+sT 6
11+sT
W2
W2
sT1+sT
W3
W3
sT1+sT
S2
7
K1+sT
W4
W4
sT1+sT
S3K
N
8M
9
1+sT(1+sT )
+
−S1K 1
2
1+sT1+sT
3
4
1+sT1+sT
STV
A B S4
Model supported by PSLFModel supported by PSSE without T ,T lead/lag block and with K 1=
A+sT1+sT
A
B
S4K
Σ
7 81 2 3
4 5 6
Input Signal #1
1 - WOTW1 11 - RampFilter32 - WOTW2 12 - RampFilter43 - Transducer1 13 - RampFilter54 - WOTW3 14 - RampFilter65 - WOTW4 15 - RampFilter76 - Transducer2 16 - RampFilter87 - LL1 17 - RampFilter98 - LL2 18
States
- RampFilter109 - RampFilter1 19 - LLGEOnly10 - RampFilter2
19
9 18−

Stabilizer PSS2B
Stabilizer PSS2B IEEE Dual-Input Stabilizer Model
+
+
Σ
STMINV
STMAXV
W1
W1
sT1+sT 6
11+sT
W2
W2
sT1+sT
W3
W3
sT1+sT
S2
7
K1+sT
W4
W4
sT1+sT
S3K
N
8M
9
1+sT(1+sT )
+
−
S1K 1
2
1+sT1+sT
3
4
1+sT1+sT
STV
10
11
1+sT1+sTΣS1V
S2V
S1MAXV
S1MINV
S2MAXV
S2MINV
7 81 2 3
4 5 6
20
19
A B S4
Model supported by PSLFModel supported by PSSE without T ,T lead/lag block and with K 1=
A+sT1+sT
A
B
S4K
1 - WOTW1 11 - RampFilter32 - WOTW2 12 - RampFilter43 - Transducer1 13 - RampFilter54 - WOTW3 14 - RampFilter65 - WOTW4 15 - RampFilter76 - Transducer2 16 - RampFilter87 - LL1 17 - RampFilter98 - LL2 18
States
- RampFilter109 - RampFilter1 19 - LLGEOnly10 - RampFilter2 20 - LL3
9 18−

Stabilizer PSS3B
�
Stabilizer PSS3B IEEE (2005) Dual-Input Stabilizer Model
Model supported by PSLF
𝑠𝑇𝑤11 + 𝑠𝑇𝑤1
Vstma
Input 1
+
Vs
Vstmi 3
8
States: 1 – Input 1 2 – Input 2 3 – Washout 1 4 – Washout 2 5 – Washout 3 6 – Filter 1 Internal 7 – Filter 1 Output 8 – Filter 2 Internal 9 – Filter 2 Output
+
11 + 𝑠𝑇2
11 + 𝑠𝑇2
Ks1
Ks2 𝑠𝑇𝑤2
1 + 𝑠𝑇𝑤2
Input 2
𝑠𝑇𝑤31 + 𝑠𝑇𝑤3
1 + 𝐴1𝑠 + 𝐴2𝑠2
1 + 𝐴3𝑠 + 𝐴4𝑠2
1 + 𝐴1𝑠 + 𝐴2𝑠2
1 + 𝐴3𝑠 + 𝐴4𝑠2
3
1
3
2
3
3
3
4
3
5 6
6 3
7 3
9

Stabilizer PSSSB
Stabilizer PSSSB IEEE PSS2A Dual-Input Stabilizer Plus Voltage Boost Signal
Transient Stabilizer and Vcutoff
+
+
Σ
STMINV
STMAXV
Input 1
Input 2
W1
W1
sT1+sT 6
11+sT
W2
W2
sT1+sT
W3
W3
sT1+sT
S2
7
K1+sT
W4
W4
sT1+sT
S3K
N
8M
9
1+sT(1+sT )
+
−S1K 1
2
1+sT1+sT
3
4
1+sT1+sT
STV
Model supported by PSLF
S4K
Σ
7 81 2 3
4 5 6
19
KV
TΔV >Vcutoff
Sw1
01
0 d1
11+sT
d2
d2
sT1+sT
ΣVcutoff
tlV
0
0≤+
+
T T0 TΔV =V -V
20
9 18−
1 - WOTW1 11 - RampFilter32 - WOTW2 12 - RampFilter43 - Transducer1 13 - RampFilter54 - WOTW3 14 - RampFilter65 - WOTW4 15 - RampFilter76 - Transducer2 16 - RampFilter87 - LL1 17 - RampFilter98 - LL2 18
States
- RampFilter109 - RampFilter1 19 - TransducerTEB10 - RampFilter2 20 - WOTEB

Stabilizer PSSSH
�
Stabilizer PSSSH Model for Siemens “H Infinity” Stabilizer
Model supported by PSLF
Vsmax
Pe
-
Vs Vsmin
States: 1 – Pe 2 – Int1 3 – Int2 4 – Int3 5 – Int4
+
11 + 𝑠𝑇𝑑
K0 K1
1𝑠𝑇1
3
2 3
3 3
4 3
5
3
1
- 1𝑠𝑇2
1𝑠𝑇3
1𝑠𝑇4
K2 K3
� � �
K4
�
� � �
K
+ +
+ +
+ +
+ +
+ +
+ +
+ +

Stabilizer PTIST1
Stabilizer PTIST1 PTI Microprocessor-Based Stabilizer
Δω 1 3
2 4
K(1+sT )(1+sT )(1+sT )(1 sT )+
+− Σ π
F
Ms1+sT
+
+Σ
+
−Σ
P
11+sT
MP' TapSelection
Table
tE
eP on machine MVA base
1
Model supported by PSSE but not yet implemented in Simulator
STV

Stabilizer PTIST3
Stabilizer PTIST3 PTI Microprocessor-Based Stabilizer
Δω 1 3
2 4
K(1+sT )(1+sT )(1+sT )(1 sT )+
+− Σ π
F
Ms1+sT
+
+
Σ+
−
Σ
P
11+sT
MP'
TapSelection
Table
tE
eP on machine MVA base
1
5
6
1+sT1+sT
AveragingFunction
2 20 1 2 3 4 5
2 20 1 2 3 4 5
(A +A s+A s )(A +A s+A s )(B +B s+B s )(B +B s+B s )
LimitFunction
DL−
DL
AL−
AL
Switch 0=
Switch 1=
Model supported by PSSE but not yet implemented in Simulator
STV

Stabilizer ST2CUT
Stabilizer ST2CUT Stabilizing Model with Dual-Input Signals
+
+Σ
1
1
K1+sT
2
2
K1+sT
3
4
sT1+sT
7
8
1+sT1+sT
SMAXLS SS CU TO T CL TO
S T TO CL
S CT TO CU
V = V if (V +V >V >V +V )V = 0 if (V < V +V )V = 0 if (V > V +V )
5
6
1+sT1+sT
SSV
Output Limiter
Input Signal #1
Input Signal #2
9
10
1+sT1+sT
SMINL
TO
T
V = initial terminal voltageV = terminal voltage
Model supported by PSSE
STV
1
2
3 4 5 6
1 - Transducer12 - Transducer23 - Washout4 - LL15 - LL26 - Unlimited Signal
States

Stabilizer STAB1
Stabilizer STAB1 Speed-Sensitive Stabilizing Model
Ks1+sT
1
3
1+sT1+sT
2
4
1+sT1+sTSpeed (pu)
LIM-H
LIMH
Model supported by PSSE
STV1 2 3
1 - Washout2 - Lead-lag 13 - Lead-lag 2
States

Stabilizer STAB2A
Stabilizer STAB2A Power-Sensitive Stabilizing Unit
3
2 2
2
K sT1+sT
−
3
3
K1+sT
eP on machine MVA base
LIM-H
LIMH+
+Σ
4K
2
5
5
K1+sT
Model supported by PSSE
STV
4
1 3− 5 6−
3
1 - Input State 12 - Input State 23 - Input State 34 - T5 - Output State 16 - Output State 2
States

Stabilizer STAB3
Stabilizer STAB3 Power-Sensitive Stabilizing Unit
eP on machine MVA base
LIM-V
LIMV−
+ Σ X1
11+sT
X
X2
-sK1+sTt
11+sT
refP
Model supported by PSSE
STV1 2 3
t
X1
1 - Int T2 - Int T3 - Unlimited Signal
States

Stabilizer STAB4
Stabilizer STAB4 Power-Sensitive Stabilizer
eP on machine MVA base
L1
L2−
+Σ X
X2
sK1+sT
a
X1
1+sT1+sTt
11+sT
refP
b
c
1+sT1+sT d
11+sT e
11+sT
Model supported by PSSE
STV1
2 3 4 5 6
d
1 - Input2 - Reset3 - LL14 - LL25 - T6 - Unlimited Signal
States

Stabilizer STBSVC
Stabilizer STBSVC WECC Supplementary Signal for Static var Compensator
Input Signal #1
Input Signal #2
S1
S7
K1+sT
S3K+
+Σ S13
S14
sT1+sT
SCS-V
SCSV
S3K
S2
S10
K1+sT
S11
S12
1+sT1+sT
S8
S9
1+sT1+sT
Model supported by PSSE
STV
1 2
3 4
5
1 - Transducer12 - LL13 - Transducer24 - LL25 - Washout
States

Stabilizer WSCCST
Stabilizer WSCCST WSCC Power System Stabilizer
+
qv
qv
K1+sT
T0V
signal j
speed 1accpw 2freq 3
− − − − − −
SMAXV
SLOWV
+
Model supported by PSLFBlocks in gray have not been implemented in Simulator
q
q
sT1+sT
'q2
q2
1+sT1+sT
'q1
q1
1+sT1+sT
'q3
q3
1+sT1+sT
TVΣ+−
1
11+sT
2
2
sT1+sT qsK+f(U)
k
+
'Vs
qs
11+sT
3
3
sT1+sT 4
s1+sT
tK−
−
+
Σ Σ
ΣU
1
2
3 4 5 6
KV
Sw1
01
0
d1
11+sT
d2
d2
sT1+sT
tlV
SV
TΔV >Vcutoff
ΣVcutoff
0
0≤+
+
T T0 TΔV =V -V
1 - Transducer12 - Transducer23 - WashoutTq4 - LL15 - LL26 - LL3
States

Stabilizer WT12A1 and WT1P
Stabilizer WT12A1 and WT1P Pseudo Governor Model for Type 1 and Type 2 Wind Turbines
Speed
genP
2
11+sT
−+Σ
1s
MINPI
MAXPI
IK
PE
11+sT
1
11+sT
II
1WT12A1 supported by PSSE with K =T
WT1P supported by PSLF
12
3 4
gen
I
1
mech
1 - P
2 - K3 - T4 - P
States
refω
droopKΣ
Σ
PK
refP
mechP+
+
−+
+

Stabilizer WT1P and WT12A1
WT1P is the same as WT12A1. See WT12A documentation

Stabilizer WT2P
Stabilizer Model WT2P
Model supported by PSLF
Σ
refω
Σ
Σ
−
+
+
ω Kw
Kdroop
−
+
Pgen
Pref
−
11 + 𝑠𝑇𝑝𝑒
𝐾𝑝 + 𝐾𝑖𝑠
1
1 + 𝑠𝑇1
11 + 𝑠𝑇2
Pmech (sent to WT2T model)
MINPI
MAXPI

Stabilizer WT3P and WT3P1
Stabilizer WT3P and WT3P1 Pitch Control Model for Type 3 Wind Generator
ORDP
+Σ
MAX-RTheta
MAXRTheta
P
1sT
P PI MAX MAX MIN MIN MAX RATE
WT3P supported by PSLF T =T , Theta =PI , Theta =PI , and RTheta PI
WT3P1 supported by PSSE with no non-windup limits on pitch control=
12
3
1 - Pitch2 - PitchControl3 - PitchComp
States
refω
Σ
Σ
setP
Pitch
−
+
+
ω IPPP
KK +s
ICPC
KK +s
Σ
MAXTheta
MINTheta
MAXTheta
MINTheta
0
− −
+ +

Switched Shunt CAPRELAY
Switched Shunt CAPRELAY
Rem Bus Remote Bus Tfilter Voltage filter time constant in sec. tbClose Circuit breaker closing time for switching shunt ON in sec. tbOpen Circuit breaker closing time for switching shunt OFF in sec. V1On First voltage threshold for switching shunt capacitor ON in sec. T1On First time delay for switching shunt capacitor ON in sec. V2On Second voltage threshold for switching shunt capacitor ON in sec. T2On Second time delay for switching shunt capacitor ON in sec. V1Off First voltage threshold for switching shunt capacitor OFF in sec. T1Off First time delay for switching shunt capacitor OFF in sec. V2Off Second voltage threshold for switching shunt capacitor OFF in sec. T2Off Second time delay for switching shunt capacitor OFF in sec.

Switched Shunt CSSCST
Static Var System Model CSSCST
Model supported by PSLF
See CSVGN1, CSVGN3 and CSVGN4 for more information.

Switched Shunt FACRI_SS
Fast AC Reactive Insertion for Switched Shunts (FACRI_SS) uv1 Switching Group 1 under voltage level 1 (pu) uv2 Switching Group 1 under voltage level 2 (pu) uv1td Switching Group 1 time delay level 1 (sec) uv2td Switching Group 1 time delay level 2 (sec) inttd Switching Group 1 first switch time delay, initial time delay (sec) uv3 Voltage at terminal bus that triggers Switching Group 2 switching logic (pu) uv4 Switching Group 2 under voltage low level (pu) uv5 Switching Group 2 under voltage high level (pu) td1 Switching Group 2 time delay for loop 1 (sec) td2 Switching Group 2 time delay for loop 2 (sec) td3 Switching Group 2 time delay for loop 3 (sec) td4 Switching Group 2 time delay for loop checks (sec) td5 Duration of time that conditions are checked Monitored Bus b while in each loop (sec) Extra Object 1 Capacitor 1 – Switching Group 1 Extra Object 2 Capacitor 2 – Switching Group 1 Extra Object 3 Reactor 1 – Switching Group 1 Extra Object 4 Reactor 2 – Switching Group 1 Extra Object 5 Reactor 3 – Switching Group 1 Extra Object 6 Capacitor a1 – Switching Group 1 Extra Object 7 Capacitor a2 – Switching Group 1 Extra Object 8 Reactor a1 – Switching Group 1 Extra Object 9 Monitored Bus b – Switching Group 2 Extra Object 10 Reactor b1 – Switching Group 2 Extra Object 11 Capacitor b1 – Switching Group 2 Extra Object 12 Capacitor b2 – Switching Group 2

Switched Shunt FACRI_SS
Fast AC Reactive Insertion for Switched Shunts (FACRI_SS)
The following pseudo code describes how the inputs are used to determine switched shunt operation: Switching Group 1 Switching Logic Each time that voltage and time delay conditions are met for Switching Group 1, the reactors and capacitors are checked in the following order until a device is found that can be switched. Reactors are tripped and capacitors are closed. Only one device is switched each time switching is required.
(1) Reactor 1 (2) Reactor a1 (3) Reactor 2 (4) Reactor 3 (5) Capacitor 1 (6) Capacitor a1 (7) Capacitor 2 (8) Capacitor a2
Switching Group 2 Switching Logic Each time that voltage and time delay conditions are met for Switching Group 2, if the reactor is online it will be tripped first before any capacitor switching. Depending on voltage conditions, capacitors may or may not be turned on. When capacitors are switched, they are checked in the following order until a device is found that can be switched. Only one capacitor is switched each time switching is required.
(1) Capacitor b1 (2) Capacitor b2
If (Reactor online) Then Begin Trip Reactor If (VoltMeasBusb <= uv4) Then Begin Do capacitor switching End
End Else If (not Reactor online) Then Begin
If (VoltMeasBusb <= uv4) or (VoltMeasBusb <= uv5) Then Begin Do capacitor switching End
End Continued on next page

Switched Shunt FACRI_SS
Fast AC Reactive Insertion for Switched Shunts (FACRI_SS)
Continued from previous page Initialization at the start of transient stability run FirstSwitchComplete = False Initialize Switching Group 2 Loop Trackers Operations performed at each time step VoltMeas = Voltage at the terminal bus of the switched shunt to which this model is assigned // If voltage falls below specified thresholds, timers are started to record how long the voltages remain below these thresholds. // The specific timer pseudo code is not shown here. If (not FirstSwitchComplete) and ( (VoltMeas < uv1 for inttd) or (VoltMeas < uv2 for inttd)) Then Begin
Check Group 1 Switching FirstSwitchComplete = True
End If (FirstSwitchComplete) Then Begin
If (VoltMeas < uv1 for uv1td) Then Begin
Check Group 1 Switching Reset Group 1 Timer
End If (VoltMeas < uv2 for uv2td) Then Begin
Check Group 1 Switching Reset Group 1 Timer
End End If (VoltMeas > uv1) Then Begin
Reset Group 1 Timers FirstSwitchComplete = False
End Continued on next page

Switched Shunt FACRI_SS
Fast AC Reactive Insertion for Switched Shunts (FACRI_SS)
Continued from previous page // The condition of VoltMeas < uv3 triggers the checking of voltages at Monitored Bus b. This latches on for the duration specified by // td4. The specific timer pseudo code is not shown here, but Group2Timer will be used to keep track of this. VoltMeasBusb = Voltage at Monitored Bus b If (VoltMeas < uv3) and (Group2Timer < td4) Then Begin
If (Group2Timer > td1) and (not Group2Loop1Done) Then Begin Check Group 2 Switching Group2Loop1Done = True // Continue doing Check Group 2 Switching for td5 until some switching done End If (Group2Timer > td2) and (not Group2Loop2Done) Then Begin Check Group 2 Switching Group2Loop2Done = True // Continue doing Check Group 2 Switching for td5 until some switching done End If (Group2Timer > td3) and (not Group2Loop3Done) Then Begin Check Group 2 Switching Group2Loop3Done = True // Continue doing Check Group 2 Switching for td5 until some switching done End
End Else If (Group2Timer > td4) Then Begin
Reset Group 2 Timers Reset Group 2 Loop Trackers
End

Switched Shunt MSC1
Static Var System Model MSC1
Model supported by PSLF
Tin1 Time 1 for Switching in (sec.) Vmin1 Voltage lower limit 1 (p.u.) Tout1 Time 1 for Switching out (sec.) Vmax1 Voltage upper limit 1 (p.u.) Tin2 Time 1 for Switching in (sec.) Vmin2 Voltage lower limit 1 (p.u.) Tout2 Time 1 for Switching out (sec.) Vmax2 Voltage upper limit 1 (p.u.) Tlck Lock out time (sec.)

Switched Shunt SVSMO1
�⬚
Static Var System Model SVSMO1
Model supported by PSLF
�⬚
+
+
-
ISVC
�⬚
Vbus
�⬚ Vr
+
+
+
π
𝐾𝑝𝑝𝐾𝑖𝑝𝑠
1 + 𝑠𝑇𝑐1
1 + 𝑠𝑇𝑏1
Bref Control Logic
Linear or Non-Linear Slope Logic
11 + 𝑠𝑇2
MSS1
Vemax Bsvc (p.u.)
Bref
Vrmax
Vrmin
Berr BSVC(MVAr)
B
Vsched
Vcomp -
+
Vsig
Vref
Vrefmin
Vrefmax
SVC over and under voltage tripping function
Vemin
1 + 𝑠𝑇𝑐2
1 + 𝑠𝑇𝑏2 𝐾𝑝𝑝
𝐾𝑖𝑝𝑠
Bmax
Bmin
Deadband Control (Optional)
MSS Switching Logic Based on B
MSS8
Over Voltage Strategy, Under Voltage Strategy and Short-Term Rating
11 2 3
14
5
States: 1 – Vbus Sensed 2 – Regulated B PI 3 – PI Delay 4 – Regulated Slow B PI 5 – Verr LL

Switched Shunt SVSMO2
�⬚
Static Var System Model SVSMO2
Model supported by PSLF
�⬚
+
+
-
ISVC
�⬚
Vbus
�⬚ Vr
+
+
+
π
𝐾𝑝𝑝𝐾𝑖𝑝𝑠
1 + 𝑠𝑇𝑐1
1 + 𝑠𝑇𝑏1
Bref Control Logic
Linear or Non-Linear Slope Logic
11 + 𝑠𝑇2
MSS1
Vemax Bsvc (p.u.)
Bref
Vrmax
Vrmin
Berr BSVC(MVAr)
B
Vsched
Vcomp -
+
Vsig
Vref
Vrefmin
Vrefmax
SVC over and under voltage tripping function
Vemin
1 + 𝑠𝑇𝑐2
1 + 𝑠𝑇𝑏2 𝐾𝑝𝑝
𝐾𝑖𝑝𝑠
Bmax
Bmin
MSS Switching Logic Based on B
MSS8
Over Voltage Strategy, Under Voltage Strategy and Short-Term Rating
11 2 33
14
5
States: 1 – Vbus Sensed 2 – Regulated B PI 3 – PI Delay 4 – Regulated Slow B PI 5 – Verr LL
Look-up Table dbe
-dbe dbe
-dbe

Switched Shunt SVSMO3
�⬚
Static Var System Model SVSMO3
Model supported by PSLF
�⬚
+
+
-
Vsig
�⬚
Vbus
Vr
+ + 𝐾𝑝𝑝𝐾𝑖𝑝𝑠
1 + 𝑠𝑇𝑐1
1 + 𝑠𝑇𝑏1
dbd Logic
11 + 𝑠𝑇2
MSS1
Vemax It (p.u.)
Bref
Vrmax
Vrmin
flag1 = 1
(close)
flag1 = 0
(open)
Vsched
-
-
flag2
Vref
Vrefmin
Vrefmax
STATCOM over and under voltage tripping function
Vemin
1 + 𝑠𝑇𝑐2
1 + 𝑠𝑇𝑏2 𝐾𝑝𝑝
𝐾𝑖𝑝𝑠
Imax
Imin
MSS Switching Logic Based on Q
MSS8
I2t Limit
1 2 3
14
5
States: 1 – Vbus Sensed 2 – Regulated I PI 3 – PI Delay 4 – Regulated Slow Control PI 5 – Verr LL
flag1 = 0
flag1 = 1
0
dbd > 0: open
dbd = 0: close
dbd > 0: open
dbd = 0: close 𝑋𝑐 = �
𝑋𝑐1 𝑖𝑖 𝑉𝑉 ≥ 𝑉1 𝑋𝑐2 𝑖𝑖 𝑉2 < 𝑉𝑉 < 𝑉1𝑋𝑐3 𝑖𝑖 𝑉𝑉 ≤ 𝑉2
Xco 0
1
-Idbd
Idbd
+ +

Switched Shunt SWSHNT
Switched Shunt SWSHNT
Ib Remote Bus NS Total number of switches allowed VIN High voltage limit PT Pickup time for high voltage in sec. ST Switch time to close if reactor or switch time to open if capacitor in sec. VIN Low voltage limit PT Pickup time for low voltage in sec. ST Switch time to close if reactor or switch time to open if capacitor in sec.
Model supported by PSEE










![Block and Level Diagrams - Yamaha CorporationBlock and Level Diagrams-60dBu-50dBu-40dBu-30dBu-20dBu-10dBu 0dBu +10dBu +20dBu +30dBu +30dBu +40dBu [-26dBu] MONITOR OUT [+4dBu] SUBWOOFER](https://static.fdocument.org/doc/165x107/5e3df7e6537ebe7af74d77d3/block-and-level-diagrams-yamaha-corporation-block-and-level-diagrams-60dbu-50dbu-40dbu-30dbu-20dbu-10dbu.jpg)