Block Diagrams GENSAL
216
Exciter AC7B and ESAC7B C E R sT + 1 1 Σ Σ REF V S V UEL V + − + Σ 1 E sT E K D K π ( ) EX N F fI = C FD N E KI I V = ( ) X E E E V VS V = + − + − + + + + FE V X V E V EX F FD I FD E Σ Σ Exciter AC7B and ESAC7B IEEE 421.5 2005 Type AC7B Excitation System Model 1 IR DR PR DR K sK K s sT + + + L FE -K V + C V AC7B supported by PSSE ESAC7B supported by PSLF with optional speed multiplier RMAX V FEMAX D FD E E E V -K I K +S (V ) π IA PA K K s + AMAX V A V Σ 2 F K 1 F K + + 3 1 F F sK sT + − P T KV EMIN V AMIN V RMIN V N I E t IR DR A 1 - V 2 - Sensed V 3 - K 4 - K 5 - V 6 - Feedback States 1 2 3 4 5 6 Speed 1 0 Spdmlt
-
Upload
calvojm6786 -
Category
Documents
-
view
111 -
download
2
description
PSSE block digram for hydro generators
Transcript of Block Diagrams GENSAL

Exciter AC7B and ESAC7B
CE
RsT+11
Σ Σ
REFV
SV
UELV
+
−
+
Σ1
EsT
EK
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
( )X E E EV V S V=
+
−
+
−
+
++
+
FEV
XV
EV
EXF
FDI
FDE
Σ Σ
Exciter AC7B and ESAC7B IEEE 421.5 2005 Type AC7B Excitation System Model
1IR DR
PRDR
K sKKs sT
+ ++
L FE-K V
+
CV
AC7B supported by PSSEESAC7B supported by PSLF with optional speed multiplier
RMAXVFEMAX D FD
E E E
V -K IK +S (V )
πIAPA
KKs
+
AMAXV
AV
Σ 2FK
1FK
+
+
3
1F
F
sKsT+
−
P TK V
EM INVAM INVRM INV
NI
E
t
IR
DR
A
1 - V2 - Sensed V3 - K4 - K5 - V6 - Feedback
States
12
3 4
5
6
Speed
10
Spdmlt

Exciter AC8B
RsT+11
Σ 1A
A
KsT+
RMAXV
RMINV
REFV SV
+−
+
+
Exciter AC8B IEEE 421.5 2005 AC8B Excitation System
RVΣ
Model supported by PSSE
COMPV
1
EsT
( )E E EK S V+
DK
( )EX NF f I=
C FDN
E
K IIV
=
−
+
+
EXF
FDI
FDE
Σ
NI
Σ π
FEV
52
E
t
R
1 - V2 - Sensed V3 - PID 14 - PID 25 - V
States
3
1
4
FEMAX D FD
E E E
V -K IK +S (V )
EM INV
1IR DR
PRDR
K sKKs sT
+ ++
++
+
UELV OELV
PIDMAXV
PIDMINV

Exciter BPA_EA
TV
RsT+11
1
11 AsT+Σ
REFV
+
−+
Σ1
EsT
E ES K+
+
−
Exciter BPA_EA Continuously Acting DC Rotating Excitation System Model
1A
A
KsT+
1F
F
sKsT+
Model in the public domain, available from BPA
STBV
FDE
Σ−
+
RMAXV
RMINV
RegulatorExciter
Filter
Stabilizer
FD
t
R
R1
F
1 - E2 - Sensed V3 - V4 - V5 - V
States
3 4
5
12

Exciter BPA EB
RsT+11
1
11 AsT+Σ
REFV
+
−+
Σ1
EsT
E ES K+
+
−
Exciter BPA EB Westinghouse Pre-1967 Brushless Excitation System Model
1A
A
KsT+
1F
F
sKsT+
Model in the public domain, available from BPA
STBV
FDEΣ
−
+
RMAXV
RMINV
Regulator Exciter
Filter
Stabilizer
1
11 FsT+
FD MAXE
FD MINE 0=
TV
FD
t
R
R1
F
F1
1 - E before limit2 - Sensed V3 - V4 - V5 - V6 - V
States
3 4
5
12
6

Exciter BPA EC
1
11 AsT+Σ
REFV
+
−
+
Σ1
EsT
E ES K+
+
−
Exciter BPA EC Westinghouse Brushless Since 1966 Excitation System Model
1A
A
KsT+
1F
F
sKsT+
Model in the public domain, available from BPA
STBV
FDEΣ−
+
RMAXV
RMINV
Regulator Exciter
Stabilizer
FD MAXE
FD MINE 0=
E ES K+
TV3
4
12
FD
R
R1
F
1 - E before limit2 - V3 - V4 - V
States

Exciter BPA ED
Exciter BPA ED SCPT Excitation System Model
Model in the public domain, available from BPA
RsT+11
Σ
REFV
SV
+
−+
Σ1
EsT+
+
FDE
RVΣ−
+
20.78
If 1, 0
FD
THEV
B
IAV
A V
⎛ ⎞⋅= ⎜ ⎟⎝ ⎠> =
1F
F
sKsT+
0
BMAXV
BV
THEV P T I TV K V jK I= +
1 A−FDI
Σ+
−
EK
π
1A
A
KsT+
RMAXV
RMINV
1
11 AsT+
Stabilizer
Regulator Exciter
'TV
TV
TITHEVV
3 4
5
12
t
A
R
1 - EField2 - Sensed V3 - V4 - V5 - Feedback
States

Exciter BPA EE
'TV
REFV
−
+
Σ1
EsT
E ES K+
+
−
Exciter BPA EE Non-Continuously Active Rheostatic Excitation System Model
'
1A
RH
KsT
∗
+
Model in the public domain, available from BPA
FDE+
RMAXV
RMINV
Regulator Exciter
FD MAXE
FD MINE
Σ
If:, , ,
T V R RMAX
T V R RH
T V R RMIN
V K V VV K V VV K V V
Δ ≥ =
Δ < =
Δ ≤− =
RV
'TV
'TOV
−
+
Σ TVΔ
RHV
RH'
* NOTE:If the time constant T is equal to
zero, this block is represented as K /sA
1
2
RH
1 - EField before limit2 - V
States

Exciter BPA EF
Σ
REFV
+
−
+
Σ1
EsT
E ES K+
+
−
Exciter BPA EF Westinghouse Continuous Acting Brushless Rotating Alternator
Excitation System Model
1F
F
sKsT+
Model in the public domain, available from BPA
SOV
FDEΣ−
+
RMAXV
RMINV
Regulator Exciter
Stabilizer
FD MAXE
FD MINE 0=
E ES K+
( )TV
T 0R =
(1 )A AK sTs+
3
12
R
F
1 - EField before limit2 - V3 - V
States

Exciter BPA EG
Exciter BPA EG SCR Equivalent Excitation System Model
Model in the public domain, available from BPA
Σ
REFV
SOV
+
−
+
FDE
RVΣ−
+
1F
F
sKsT+
1A
A
KsT+
RMAXV
RMINV
1
11 AsT+
Stabilizer
Regulator
TV
3
12
A
F
1 - EField2 - V3 - V
States

Exciter BPA EJ
1
11 AsT+
REFV
+
+
Exciter BPA EJ Westinghouse Static Grand Couple PP#3 Excitation System Model
1A
A
KsT+
1F
F
sKsT+
Model in the public domain, available from BPA
'TV
FDEΣ
−
+
RMAXV
RMINV
Regulator
Stabilizer
FD MAXE
FD MINE
SOV
11 RsT+ − Σ
Filter
π3
4
12
t
R
F
1 - EField before limit2 - Sensed V3 - V4 - V
States

Exciter BPA EK
1
11 AsT+Σ
REFV
+
−
+
Σ1
EsT
E ES K+
+
−
Exciter BPA EK General Electric Alterrex Excitation System Model
1A
A
KsT+
1F
F
sKsT+
Model in the public domain, available from BPA
SOV
FDEΣ−
+
RMAXV
RMINV
Regulator Exciter
Stabilizer
FD MAXE
FD MINE 0=
T
R
V(T =0)
3
4
12
R
R1
F
1 - EField before limit2 - V3 - V4 - V
States

Exciter BPA FA
Exciter BPA FA WSCC Type A (DC1) Excitation System Model
Model in the public domain, available from BPA
FV
SV
1
EsTFDE
−
+
1F
F
sKsT+
VR( )C T C C TV V R jX I= + +TV
TI Σ+
−
E ES K+
11
C
B
sTsT
++
RMAXV
RMINV
1A
A
KsT+
ERRV +
FEV
RsT+11CV
Σ
REFV
−
+
Σ3
4
5
1
2
t
B
R
F
1 - EField2 - Sensed V3 - V4 - V5 - V
States

Exciter BPA FB
Exciter BPA FB WSCC Type B (DC2) Excitation System Model
Model in the public domain, available from BPA
FV
SV
1
EsTFDE
−
+
1F
F
sKsT+
VR( )C T C C TV V R jX I= + +TV
TI Σ+
−
E ES K+
11
C
B
sTsT
++
T RMAXV V
T RMINV V
1A
A
KsT+
ERRV +
FEV
RsT+11CV
Σ
REFV
−
+
Σ3
4
5
1
2
t
B
R
F
1 - EField2 - Sensed V3 - V4 - V5 - V
States

Exciter BPA FC
1A
A
KsT+
RMAXV
RMINV
1F
F
sKsT+
0
SV
+Σ
FV
1
EsT
EK
DK
( )EX NF f I=
C FDN
E
K IIV
=
+
−−
+
+
FEV
RVEV
EXF
FDI
FDE
Σ
NI
( )C T C C TV V R jX I= + +TV
TI
ERRV
RsT+11CV
REFV
−
+
Exciter BPA FC WSCC Type C (AC1) Excitation System Model
Model in the public domain, available from BPA
π11
C
B
sTsT
++
Σ
Σ+
34
5
1
2
E
t
R
LL
F
1 - V2 - Sensed V3 - V4 - V5 - V
States

Exciter BPA FD
1A
A
KsT+
RMAXV
RMINVSV
+
+Σ
1
EsT
EK
+
−
FDE
Exciter BPA FD WSCC Type D (ST2) Excitation System Model
1F
F
sKsT+
FV 0
π
+
BV
E P T I TV K V jK I= +TV
TI
( )EX NF f I=C FDN
E
K IIV
=FDI NI EXF
MAXEFD
+−
EV If 0. and 0., 1.P I BK K V= = =
RV
Model in the public domain, available from BPA
( )C T C C TV V R jX I= + +TV
TI
ERRV
RsT+11CV
REFV
−
+
Σ
Σ
Σ3
4
1
2
t
R
F
1 - EField2 - Sensed V3 - V4 - V
States

Exciter BPA FE
Exciter BPA FE WSCC Type E (DC3) Excitation System Model
ERRV RMAX RMIN
V RH
V VsK T
−
RMAXV
RMINV
If , If , If ,
ERR V R RMAX
ERR V R RH
ERR V R RMIN
V K V VV K V VV K V V
≥ =
< =
≤− =
RHV
VK−
VK
Σ1
EsT
E EK S+
FDE+
−RV
Model in the public domain, available from BPA
( )C T C C TV V R jX I= + +TV
TI RsT+11CV
REFV
−
+
Σ
FEV
3
1
2
t
RH
1 - EField before limit2 - Sensed V3 - V
States

Exciter BPA FF
11
C
B
sTsT
++
SV
+
Σ1
EsT
E EK S+
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
+
−
+
+
FEV
RVEV
EXF
FDI
FDE
Σ
Exciter BPA FF WSCC Type F (AC2) Excitation System Model
1A
A
KsT+
AMAXV
AMINV
1F
F
sKsT+
0−
FV LV
LVGateΣ
AV
+
RMINV
RMAXV
BK
LK
HK
Σ −
+
LRVHV
NI
−
Model in the public domain, available from BPA
( )C T C C TV V R jX I= + +TV
TI RsT+11CV
REFV
−
+
Σ
ERRV
Σ+ 34
5
1
2
E
t
A
LL
F
1 - V2 - Sensed V3 - V4 - V5 - V
States

Exciter BPA FG
1A
A
KsT+
Exciter BPA FG WSCC Type G (AC4) Excitation System Model
11
C
B
sTsT
++
Model in the public domain, available from BPA
FDE+
IMIMV
IMAXV
( )C T C C TV V R jX I= + +TV
TI RsT+11CV
REFV
−
+
Σ
VS
ERRV
ΣRMIN C FD(V K I )−
RMAX C FD(V K I )−
+
3 1
2
t
LL
1 - EField before limit2 - Sensed V3 - V
States

Exciter BPA FH
11
C
B
sTsT
++
SV+
Σ1
EsT
E EK S+
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
+
−
+
+
FEV
RVEV
EXF
FDI
Σ
Exciter BPA FH WSCC Type H (AC3) Excitation System Model
1A
A
KsT+
AMAXV
AMINV
1 F
ssT+
0−
FV
+AV
RK
NI
HVGate π
LVK −
+
LVV
Σ
EFD
NV
FK
NK
FDNE
Model in the public domain, available from BPA
FDE
( )C T C C TV V R jX I= + +TV
TI RsT+11CV
REFV
−
+
ERRV
Σ
Σ34
5
1
2
E
t
A
LL
F
1 - V2 - Sensed V3 - V4 - V5 - V
States

Exciter BPA FH
11
C
B
sTsT
++
SV+
Σ1
EsT
E EK S+
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
+
−
+
+
FEV
RVEV
EXF
FDI
Σ
Exciter BPA FH WSCC Type H Excitation System Model
1A
A
KsT+
AMAXV
AMINV
1 F
ssT+
EMINV−
FV
+AV
RK
NI
π
EFD
NV
FK
NK
FDNE
Model in the public domain, available from BPA
FDE
( )C T C C TV V R jX I= + +TV
TI RsT+11CV
REFV
−
+
ERRV
Σ
Σ34
5
1
2
E
t
A
LL
F
1 - V2 - Sensed V3 - V4 - V5 - V
States

Exciter BPA FJ
1A
A
KsT+
Exciter BPA FJ WSCC Type J Excitation System Model
11
C
B
sTsT
++
Model in the public domain, available from BPA
FDE+
RMAXV
RMINV
( )C T C C TV V R jX I= + +TV
TI RsT+11CV
REFV
−
+
Σ
SV
ERRV
T FDMAX C FD(V E K I )−
+
1F
F
sKsT+
T FDMIN C FD(V E K I )−
Σ−
FV
3
4
1
2
t
LL
F
1 - EField before limit2 - Sensed V3 - V4 - V
States

Exciter BPA FK
1A
A
KsT+
Exciter BPA FK WSCC Type K (ST1) Excitation System Model
11
C
B
sTsT
++
Model in the public domain, available from BPA
FDE+
( )C T C C TV V R jX I= + +TV
TI RsT+11CV
REFV
−
+
Σ
VS
ERRV
T RMAX C FD(V V K I )−
+
1F
F
sKsT+
T RMIN C FD(V V K I )−
Σ−
IMIMV
IMAXV
FV
3
4
1
2
t
LL
F
1 - EField before limit2 - Sensed V3 - V4 - V
States

Exciter BPA FL
SV
REFV
+
+
+Σ+
FDE
Exciter BPA FL WSCC Type L (ST3) Excitation System Model
IMINV
IMAXV
J1K1
C
B
sTsT
++
−
GV
AV
GK
1A
A
KsT+
RMAXV
RMINV
RVπ
π( )PE T I P L TV K V j K K X I= + +TV
TI
( )EX NF f I=C FDN
E
K IIV
=FDI NI EXF
EV
BV
FDMAXE
GMAXV
jP PK K e pθ=
( )C T C C TV V R jX I= + +TV
TI RsT+11CV
REFV
−
+
ERRV
Σ
Σ
Model in the public domain, available from BPA
3 1
2
M
t
LL
1 - V2 - Sensed V3 - V
States

Exciter BPA FM through BPA FV
Exciter BPA FM through BPA FV
No block diagrams have been created

Exciter DC4B
RsT+11
UEL(UEL=1)
V
REFV
+−+
FDE
Exciter DC4B IEEE 421.5 2005 DC4B Excitation System Model
1A
A
KsT+
T RMAXV V
T RMINV V
1F
F
sKsT+
−
OEL(OEL=2)
V
HVGate
LVGate
Alternate UEL Inputs
Alternate OEL InputsOEL
(OEL=1)
V
+
Model supported by PSSEModel supported by PSLF with optional speed multiplier
CE
UEL(UEL=2)
V
SV
1I D
PD
K sKKs sT
+ ++Σ
RMAX AV K
RMIN AV K
1
EsT
EMINV
π Σ π
EK
( )X E E EV V S V=
−
Σ
RV
TV
+
+
−+
FV
FD
t
R
1 - E2 - Sensed V3 - PID14 - PID25 - V6 - Feedback
States
3 4
5
6
12
Speed
1 0 Spdmlt

Exciter ESAC1A
CE
RsT+11 1
1C
B
sTsT
++Σ
REFV
+
−
+
Σ1
EsT
EK
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
( )X E E EV V S V=
+
−
+
++
+
FEV
RV
XV
EV
EXF
FDI
Σ Σ
Exciter ESAC1A IEEE Type AC1A Excitation System Model
1A
A
KsT+
AMAXV
RMINV
RMAXV
1F
F
sKsT+
0−
UELV
HVGate
OELV
LVGate
FV
Model supported by PSSEModel supported by PSLF with optional speed multiplier
SV
AMINV
FDE3
4
5
12
E
t
A
LL
F
1 - V2 - Sensed V3 - V4 - V5 - V
States
Speed
10
Spdmlt

Exciter ESAC2A
E
1sTR
11+sT
C
B
1+sT1+sT BK
HK
F
F
sK1+sT EK
X E E EV =V S (V ) EX NF =f(I )
DK
C FDN
E
K II =V
CE REFV
FV
++
−
−
AV+
−
UELV OELVAMAXV
AMINV HV
RV −
+
RMINV
RMAXV
0
EV
FEMAX D FD
E E E
V -K IK +S (V )
FDE
EXF
XV NI
FEV
+
+
+
+
FDI
Exciter ESAC2A IEEE Type AC2A Excitation System Model
Model supported by PSSEModel supported by PSLF with optional speed multiplier
A
A
K1+sT
SV
34
5
1
2Σ Σ Σ
Σ
Σ
πHVGate
LVGate
E
t
A
LL
F
1 - V2 - Sensed V3 - V4 - V5 - V
States
Speed
10
Spdmlt

Exciter ESAC3A
CE
RsT+11 1
1C
B
sTsT
++Σ Σ 1
A
A
KsT+
AMAXV
AMINV
1 F
ssT+
FEMAX D FD
E E E
V -K IK +S (V )
EMINV
REFV
SV
UELV
HVGate
+
−
+
π Σ
FV
1
EsT
RK
EK
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
( )X E E EV V S V=
+
−
+
−
+
++
+
FEV
AV RV
XV
EV
EXF
FDI
FDE
EFD
NV
FK
NK
NV
Σ Σ
Model supported by PSSEModel supported by PSLF with optional speed multiplier
CV
NI
Exciter ESAC3A IEEE Type AC3A Excitation System Model
3
4
5
12
E
t
A
LL
F
1 - V2 - Sensed V3 - V4 - V5 - V
States
Speed
10
Spdmlt

Exciter ESAC4A
CERsT+1
1 11
C
B
sTsT
++Σ 1
A
A
KsT+
RMAX C IFDV -K I
RMINV
REFV
SV
UELV
HVGate
+
−
+
FDE
Exciter ESAC4A IEEE Type AC4A Excitation System Model
IM INV
IM AXV
IV
FD
Model supported by PSLF and PSSEPSSE uses nonwindup limit on E
3 12
t
LL
1 - EField before limit2 - Sensed V3 - V
States

Exciter ESAC5A
CE
RsT+11
Σ 1A
A
KsT+
RMAXV
RMINV 0
REFV
SV
+
−
+
Σ1
EsT
EK
( )X E E EV V S V= ⋅
+
−
+
+
XV
FDE
F2 F3If T =0, then sT =0. Σ
Exciter ESAC5A IEEE Type AC5A Excitation System Model
( )( )( )
3
1 2
11 1
F F
F F
sK sTsT sT
++ +
−
Model supported by PSLF and PSSE
3
4 5
12
t
R
1 - EField2 - Sensed V3 - V4 - Feedback 15 - Feedback 2
States

Exciter ESAC6A
CE
RsT+11 1
1C
B
sTsT
++Σ Σ
REFV
SV
UELV
+
−+
ΣAV
1
EsT
EK
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
( )X E E EV V S V=
+
−
+
−
+
++
+
FEV
RV
XV
EV
EXF
FDI
FDE
Σ Σ
Exciter ESAC6A IEEE Type AC6A Excitation System Model
( )11
A K
A
K sTsT+
+
AMAXV
AMINV T RM INV V
T RM AXV V
HK11
J
H
sTsT
++
HMAXV
0
0HV Σ +
FELIMV−
+
CV
Model supported by PSSEModel supported by PSLF with optional speed multiplier
NI
3 4
5
12
E
t
A
LL
F
1 - V2 - Sensed V3 - T Block4 - V5 - V
States
Speed
10
Spdmlt

Exciter ESAC8B_GE
RsT+11
Σ 1A
A
KsT+
RMAXV
RMINV
REFV
SV
+−
+
+
Exciter ESAC8B_GE IEEE Type AC8B with Added Speed Multiplier.
RVΣ+
+
+
IRKs
PRK
1DR
DR
sKsT+
TMULT RMAX T RMAX RMIN T RMIN
Model supported by PSLFIf V 0, V V V and V V V<> = =
COMPV
1
EsT
( )E E EK S V+
DK
( )EX NF f I=
C FDN
E
K IIV
=
−
+
+
EXF
FDI
FDE
Σ
NI
Σ π
FEV
52
E
t
R
1 - V2 - Sensed V3 - PID 14 - PID 25 - V
States
3 1
4
FEMAX D FD
E E E
V -K IK +S (V )
EM INV
Speed
10
Spdmlt

Exciter ESAC8B_PTI
RsT+11
1A
A
KsT+
RMAXV
RMINV 0
REFV
SV
+
−
+
Σ1
EsT
EK
( )X EV EFD S EFD= ⋅
+
−
+
+
XV
FDE
Σ
Exciter ESAC8B_PTI Basler DECS Model
RV
+
+
+
IRKs
PRK
1DR
D
sKsT+
Model supported by PSSE
CV
3
4 5 12
FD
t
R
1 - E2 - Sensed V3 - Derivative Controller4 - Integral Controller5 - V
States
ΣΣ

Exciter ESDC1A
CE
RsT+11
Σ 1A
A
KsT+
RMAXV
0
REFV
SV
+
−
+
Σ1
EsT
EK
( )X EV EFD S EFD= ⋅
+
−
+
+
XV
FDE
Σ
Exciter ESDC1A IEEE Type DC1A Excitation System Model
RV
11F
F
sKsT+
11
C
B
sTsT
++CV
UELV
HVGate
FV FEV
Model supported by PSSEModel supported by PSLF includes spdmlt, exclim, and UEL inputs that are read but not utilized in the Simulator implementation
−
RMINV
3
4
5
12
FD
t
R
F
1 - E2 - Sensed V3 - V4 - V5 - Lead-Lag
States

Exciter ESDC2A
RsT+11
Σ 1A
A
KsT+
T RMAXV VREFV
SV
+
−
+
Σ1
EsT
EK
( )X EV EFD S EFD= ⋅
+
−
+
+
XV
FDE
Σ
Exciter ESDC2A IEEE Type DC2A Excitation System Model
RV
11F
F
sKsT+
11
C
B
sTsT
++CV
HVGate
Model supported by PSSEModel supported by PSLF includes spdmlt, exclim, and UEL inputs that are read but not utilized in Simulator
CEUELV
FV
T RMINV V
FEV
−
3
4
5
12
FD
t
R
F
1 - E2 - Sensed V3 - V4 - V5 - Lead-Lag
States

Exciter ESDC3A
Exciter ESDC3A IEEE Type DC3A with Added Speed Multiplier
ERRVRMAX RMIN
V RH
V VsK T
−
RMAXV
RMINV
If , If , Else
ERR V R RMAX
ERR V R RMIN
R RH
V K V VV K V V
V V
≥ =≤− =
=
RHVVK−
VK
Σ1
E EK sT+FDE
+
−
RV
Model supported by PSLF
RsT+11CV
REFV
−
+
Σ
π
( )X EV EFD S EFD= ⋅XV Speed
10
Spdmlt
t
RH
1 - EField2 - Sensed V3 - V
States
31
2
If exclim 0 then 0 else unlimited<>

Exciter ESST1A
RsT+11
Σ
S(VOS=1)
V
REFV
+
−
+
Σ+
−AV FDE
Exciter ESST1A IEEE Type ST1A Excitation System Model
1A
A
KsT+
AMAXV
AMINV
1F
F
sKsT+
0
−
HVGate
IM INV
IM AXV( )( )( )( )
1
1
1 11 1
C C
B B
sT sTsT sT
+ ++ +
HVGate
OELV
LVGate
IV
T RM INV V
T RMAX C FDV V -K I
LRK Σ FDI
LRI
AlternateStabilizer
Inputs
AlternateUEL Inputs
+
+−
+
Model supported by PSLF and PSSE
CE
FV
3 4
5
12
S(VOS=2)
V
UEL(UEL=1)
V UEL(UEL=3)
V
UEL(UEL=2)
V
A
t
1 - V2 - Sensed V3 - LL4 - LL15 - Feedback
States

Exciter ESST2A
RsT+11
Σ 1A
A
KsT+
RMAXV
RMINV
REFV
SV
+
−+
Σ1
EsT
EK
+
−
FDE
Exciter ESST2A IEEE Type ST2A Excitation System Model
1F
F
sKsT+
UELV
HVGate
FV 0
π
BV
E P T I TV K V jK I= +TV
TI
( )EX NF f I=C FDN
E
K IIV
=FDI NI EXF
MAXEFD
−
EV If 0 and 0, 1P I BK K V= = =
Model supported by PSSEModel supported by PSLF includes UEL input that is read but not utilized in Simulator
CE
CVRV
11
C
B
sTsT
++
3
4
12 π
FD
t
R
F
1 - E2 - Sensed V3 - V4 - V
States

Exciter ESST3A
RsT+11
Σ
SV
REFV
+
−
+Σ+
AV FDE
Exciter ESST3A IEEE Type ST3A Excitation System Model
1A
A
KsT+
RMAXV
HVGate
IM INV
IM AXV11
C
B
sTsT
++IV
−
GV
RV
GK
1M
M
KsT+
MMAXV
MMINV
MVπ
π( )PE T I P L TV K V j K K X I= + +TV
TI
( )EX NF f I=C FDN
E
K IIV
=FDI NI EXF
EV
BVBMAXV
Model supported by PSLF and PSSE
CEUELV
GMAXV
RMINV
PjP PK K e θ=
34 12
M
t
R
1 - V2 - Sensed V3 - V4 - LL
States

Exciter ESST4B
RsT+11
Σ
SV
REFV
+
−
+Σ+
FDE
Exciter ESST4B IEEE Type ST4B Potential- or Compound-Source Controlled-Rectifier Exciter Model
11 AsT+
−
RV
GK
IMPM
KKs
+
MMAXV
MMINV
π
π( )E P T I P L TV K V j K K X I= + +TV
TI
( )EX NF f I=C FDN
E
K IIV
=FDI NI EXF
EVBVBMAXV
RMAXV
RMINVOELV
LVGate
IRPR
KKs
+
+
GMAX
Model supported by PSSEModel supported by PSLF includes V input that is read but not utilized in Simulator
UELV
PjP PK K e θ=
COM PV34 12
M
t
A
R
1 - V2 - Sensed V3 - V4 - V
States

Exciter EWTGFC
Exciter EWTGFC Excitation Control Model for Full Converter GE Wind-Turbine Generators
∑
Model supported by PSLF
+− 1
1 FVsT+
RFQV
11 PsT+
elecP
1
Nf
1PV
V
KsT+
+
∑RsT+1
1
IVKs
M INQ
M AXQ
π
tanFAREFP
REFQ
1
1−
0
Reactive Power Control Model
M INQ
M AXQ
varflg
−genQ
QIKs
MINV
+
−∑
REFVVIKs
QMAXI
QMINI
QCMDI
CV
3
4
5
1
2
ref
qppcmd
PV
regMeas
IV
ORD
Meas
1 - V2 - E
3 - K4 - V
5 - K6 - Q7 - P
States
6
7MAXV
TERMV
+
elecP
dbrK
∑
∑1s
÷PMAXI
−
++
−TERMV
PCMDI
∑
+
pfaflg
REFQ
01
ORDP
Converter Current Limitpqflag
∑
+
−
dbrP
0
1
0 BSTE

Exciter EX2000
RsT+11
Σ Σ IAPA
KKs
+
AMAXV
AMINV
1FK
EMAXV
EMINV
−+
π Σ
FV
1
EsT
PK ETRM⋅
EK
DK
π
( )EX EF f I=
C FDN
E
K IIV
=
( )X E E EV V S V=
+
−
+
−
+
++
+
FEV
AV
XV
EV
EXF
FDI
Σ Σ
Exciter EX2000 IEEE Type AC7B Alternator-Rectifier Excitation System Model
MinimumGate 1
IRPR
KKs
+
RMAXV
RMINV L FEK V−
ReferenceSignal
Field CurrentLimiter
2FKΣ +
+
Model supported by PSSE
EMAX
FEMAX D FDEMAX
E E E
If field current limiter is included, V is off.V -K IIf field current limiter is excluded, V =K +S (V )
CE
FDE
REF 34
12
1st PI Controller 2nd PI Controller
E
t
API
RPI
PI
1 - V2 - Sensed V3 - V4 - V5 - LL6 - IFD
States

Exciter EX2000 REFERENCE SIGNAL MODEL
REF
Exciter EX2000 Reference Signal Model
MinimumGate 2
KRCCSBASE
Machine MVA BASEELECQ1
ETERM
KVHZ
Σ
REFV
UELV
STBV
++
+
−LIMPREF
Frequency
ReactiveCurrent
Reference Signal Model
Model supported by PSSE

Exciter EX2000 FIELD CURRENT LIMITER MODEL
KIIFDKPIFDs
+
REF2IFD
LIMNIFD
Exciter EX2000 Field Current Limiter Model
LevelDetector
LatchGate 1
LatchGate 2
O R
ADVLIMIFD11
LEAD
LAG
sTsT
++
Σ
Advance Limit
( 1, 1)I T
( 3, 3)I T
( 2, 2)I T
( 4, 4)I T
Inverse Timing
A
B
C
D
A
B
C
D
LIMPIFD
REF3IFD
REF4IFD
REF1IFD
FDI
+
−
ToMinimum
Gate 1
Output =1 if level exceeded
Output =1 iftiming expired
Sw itch O peration O utput D = B if C =0O utput D = A if C =1
Field Current Lim iter Model(Over Excitation Lim iter)
Model supported by PSSE
3rd PI Controller
5
6

Exciter EXAC1
RsT+11 1
1C
B
sTsT
++Σ
SVREFV
+
Σ1
EsT
E EK S+
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
+
−
+
+
FEV
RVEV
EXF
FDI
FDE
Σ
Exciter EXAC1 IEEE Type AC1 Excitation System Model
1A
A
KsT+
RMAXV
RMINV
1F
F
sKsT+
0−
FV
Σ+
−+
CV
AMIN AMAX
AMIN RMIN RMIN AMIN
AMAX RMAX
Model supported by PSSEModel supported by PSLF also uses V and V
Simulator will narrow the limit range as appropriate when loading the DYD fileIf V V then V VIf V V the
> =
< RMAX AMAXn V VModel supported by PSLF includes speed multiplier that is not implemented in Simulator
=
CE
E
t
R
LL
F
1 - V2 - Sensed V3 - V4 - V5 - V
States
34
5
12

Exciter EXAC1A
RsT+11 1
1C
B
sTsT
++Σ
SVREFV
+
Σ1
EsT
E EK S+
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
+
−
+
+
FEV
RVEV
EXF
FDI
FDE
Σ
Exciter EXAC1A Modified Type AC1 Excitation System Model
1A
A
KsT+
RMAXV
RMINV
1F
F
sKsT+
0−
FV
Σ+
−+
CV
Model supported by PSSEModel supported by PSLF includes speed multiplier that is not implemented in Simulator
CE
34
5
12
E
t
R
LL
F
1 - V2 - Sensed V3 - V4 - V5 - V
States

Exciter EXAC2
RsT+11 1
1C
B
sTsT
++Σ
SVREFV
+
Σ1
EsT
E EK S+
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
+
−
+
+
FEV
RVEV
EXF
FDI
FDE
Σ
Exciter EXAC2 IEEE Type AC2 Excitation System Model
1A
A
KsT+
AMAXV
AMINV
1F
F
sKsT+
0−
FV
Σ+
− +
CVLV
LVGateΣ
AV
+
RM INV
RM AXV
BK
LK
HK
Σ −
+
LRV
HV
NI
−
Model supported by PSSEModel supported by PSLF includes speed multiplier that is not implemented in Simulator
CE 34
5
12
E
t
A
LL
F
1 - V2 - Sensed V3 - V4 - V5 - V
States

Exciter EXAC3
RsT+11 1
1C
B
sTsT
++Σ
SVREFV
+
Σ1
EsT
E EK S+
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
+
−
+
+
FEV
RVEV
EXF
FDI
Σ
Exciter EXAC3 IEEE Type AC3 Excitation System Model
1A
A
KsT+
AMAXV
AMINV
1 F
ssT+
0−
FV
Σ+
−
+CV AV
RK
NI
HVGate π
LVK −
+
LVV
Σ
EFD
NV
FK
NK
NEFD
Model supported by PSSEModel supported by PSLF includes speed multiplier that is not implemented in Simulator
CE
FDE34
5
12
E
t
A
LL
F
1 - V2 - Sensed V3 - V4 - V5 - V
States
FEMAXV

Exciter EXAC3A
RsT+11 1
1C
B
sTsT
++ Σ
SV
REFV
+
Σ1
EsT
E EK S+
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
+
−
+
+
FEV
RVEV
EXF
FDI
Σ
Exciter EXAC3A IEEE Type AC3 Excitation System Model
1A
A
KsT+
AMAXV
AMINV
1 F
ssT+
EMINV−
FV
Σ+
−+
AV
NI
π
RK
EFD
NV
FK
NK
NEFD
CEFDE
EMAXV Speed
Model supported by PSLF
( )
( )
L1 C S REF C FFEMAX
FA L1
FEMAX D FDEMAX
E E
LVEMIN
EX
K V +V +V -V -VV =
K KV -K I
V =S +K
VV =F
34
5
12
E
t
A
LL
F
1 - V2 - Sensed V3 - V4 - V5 - V
States
CV

Exciter EXAC4
RsT+11 1
1C
B
sTsT
++Σ
SVREFV
+
FDE
Exciter EXAC4 IEEE Type AC4 Excitation System Model
1A
A
KsT+Σ
+−
+ERRV
IM INV
IM AXV
RM IN C IFDV -K I
RM AX C IFDV -K I
Model supported by PSLF and PSSE
CE3 12
t
LL
1 - EField before limit2 - Sensed V3 - V
States

Exciter EXAC6A
Exciter EXAC6A IEEE Type AC6A Excitation System Model
Model supported by PSLF
RsT+11 1
1C
B
sTsT
++ Σ
SV
REFV
+
Σ1
EsT
E EK S+
π
( )EX NF f I=
C FDN
E
K IIV
=
+
−
+
+
FEV
EV
EXF
Σ
(1 )1A k
A
K sTsT+
+
T RMAXV V
AMINV
11
J
H
sTsT
++
0−
HV
Σ+
− +
NI
HK
CE
FDE
Speed
HM AXV
AMAXV
AV
0
+
−Σ
FELIMV
T RMINV V
DK FDI
RV3 4
5
12
E
t
A
LL
F
1 - V2 - Sensed V3 - T Block4 - V5 - V
States

Exciter EXAC8B
Exciter EXAC8B Brushless Exciter with PID Voltage Regulator
Model supported by PSLF
RsT+11
Σ1
1 AsT+
RMAXV
RMINV
REFV
SV
+−+
+Σ+
++
VIKs
VPK
1VD
VD
sKsT+
CE
Σ1
EsT
E EK S+
π
( )EX NF f I=
C FDN
E
K IIV
=
−
+
+
FEV
EV
EXF
Σ
0
NI
FDE
Speed
DK FDI
IM AX-V
IM AXV3
4
5 12
E
t
R
1 - V2 - Sensed V3 - V4 - Derivative5 - Integral
States

Exciter EXBAS
RsT+11 1
1C
B
sTsT
++Σ
STBVREFV
+
Σ1
EsT
E EK S+
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
+
−
+
+
EV
EXF
FDI
Σ
Exciter EXBAS Basler Static Voltage Regulator Feeding DC or AC Rotating Exciter Model
1A
A
KsT+
RMAXV
RMINV
1F
F
sKsT+
−
Σ+
− +
UELV
NI1
2
11
F
F
sTsT
++
IP
KKs
+
OELV
+ +
Model supported by PSSE
CE
FDE3
4 5
12
E
t
R
1 - V2 - Sensed V3 - V4 - PI5 - LL6 - Feedback LL7 - Feedback
States
67

Exciter EXBBC
3
4
11
sTsT
++ Σ
REFV
Σ1
1 EsT+
EX
+
−
FDI
Exciter EXBBC Transformer-fed Excitation System
RMAXV
RMINV+
Σ+
− +
1
2 2
1 111
TK T sT⎛ ⎞
−⎜ ⎟ +⎝ ⎠
2
1
TKT+
Model supported by PSLF but not yet implemented in Simulator
CE
FDEΣ
T FDMINE E
T FDMAXE E
Switch 0= Switch 1=
SupplementalSignal
+
−
11 FsT+

Exciter EXDC1
Exciter EXDC1 IEEE DC1 Excitation System Model
Model supported by PSLF
RsT+11
Σ
SV
REFV
+
+1
A
A
KsT+
RMAXV
RMINV
Σ1
EsT
E EK S+
+
−
11F
F
sKsT+
RV−
CE
− π
Speed
FDE11
C
B
sTsT
++
FV
3 4
5
1
2
FD
t
B
R
F
1 - E2 - Sensed V3 - V4 - V5 - V
States

Exciter EXDC2_GE
RsT+11 1
1C
B
sTsT
++
SVREFV
+
Exciter EXDC2_GE IEEE Type DC2 Excitation System Model
Σ+
−1
A
A
KsT+
RMAX TV V
Σ1
1 EsT+
E EK S+
FDE+
−
( )( )1 21 1F
F F
sKsT sT+ +
−
Model supported by PSLF
RMIN TV V
compV
π
Speed
3 4
5
1
2
FD
t
B
R
F1
F2
1 - E2 - Sensed V3 - V4 - V5 - V6 - V
States
6

Exciter EXDC2_PTI
RsT+11 1
1C
B
sTsT
++
SVREFV
+
Exciter EXDC2_PTI IEEE Type DC2 Excitation System Model
Σ+
−
1A
A
KsT+
RMAX TV V
Σ1
1 EsT+
E EK S+
FDE+
−
11F
F
sKsT+
−
Model supported by PSEE
RMIN TV V
compV
π
Speed
Σ+ERRV
3 4
5
1
2
FD
t
B
R
F
1 - E2 - Sensed V3 - V4 - V5 - V
States

Exciter EXDC2A
RsT+11 1
1C
B
sTsT
++Σ
+
Exciter EXDC2A IEEE Type DC2 Excitation System Model
−
1A
A
KsT+
RMAX TV V
Σ1
EsT
E EK S+
+
−
11F
F
sKsT+
RV−
Model supported by PSLF
CE
FV
SV
REFV+
π
Speed
FDE34
5
1
2
RMIN TV V
FD
t
B
R
F
1 - E2 - Sensed V3 - V4 - V5 - V
States

Exciter EXDC4
Σ+
Exciter EXDC4 IEEE Type 4 Excitation System Model
− 1
RHsT
RMAXV
Σ1
E EK sT++
−RHV
Model supported by PSLF
CE
RMINV
SV
REFV+
π
Speed
FDE
ESRMAXV
RMINVVK
V-K
RV
π
1
-1RK
R-K
1
2
FD
RH
1 - E2 - V
States

Exciter EXELI
11 FVsT+ Σ
REFV
+Σ
+
−
+
+
FDE
Exciter EXELI Static PI Transformer Fed Excitation System Model
PUV
Σ +
Σ1
NUsT
+
11 FIsT+
EX
FDI
F M INE
F M AXE
PIV
PNFV
−
−
+
PNFD
GENP3
1W
W
sTsT
⎛ ⎞⎜ ⎟+⎝ ⎠
2
21s
s
sTsT
−+Σ
+
+
1sK
2
11s
s
KsT+
MAXS−
MAXS
Model supported by PSLF and PSSE
CE
− Σ
3
4 5
12
NU
t
FLD
GEN
GEN
GEN
1 - T2 - Sensed V3 - Sensed I4 - P Washout15 - P Washout26 - P Washout37 - Lag Stabilizer8 - Washout Stabilizer
States
6 7
8

Exciter EXPIC1
RsT+11
Σ
REFV
Exciter EXPIC1 Proportional/Integral Excitation System Model
Σ+
−
+
( )11A AK sTs+
R1V
R2V
1
EsT
E EK S+
FDE+
−
( )( )1 21 1F
F F
sKsT sT+ +
RVTE
SV
AV( )
( ) ( )3
2 4
11 1
A
A A
sTsT sT+
+ +
RM INV
RM AXV
FD M INE
FD M AXE
Σπ0E
−
πTV
TI
( )EX NF f I=C FDN
E
K IIV
=FDI
NI
EXF
BV
0
If 0 and 0, then 1If 0, then
P I B
E
K K VT EFD E
= = == =
E P T I TV K V jK I= +
Model supported by PSLF and PSSE
CE3
4 51
2
FD
t
A
R1
R
F1
F
1 - E2 - Sensed V3 - V4 - V5 - V6 - V7 - V
States
6 7

Exciter EXST1_GE
RsT+11 1
1C
B
sTsT
++Σ
SVREFV
+
FDE
Exciter EXST1_GE IEEE Type ST1 Excitation System Model
1A
A
KsT+
+
−
IM INV
IM AXV
T RM IN C IFDV V -K I
T RM AX C IFDV V -K I
1F
F
sKsT+
−
Model supported by PSLF
compV
1
1
11
C
B
sTsT
++
AMAXV
AMINV
Σ+−
EX
lrK
Σ
FDIΣ
lrI
+
−
+−
3
4
5 12
0
A
t
LL
F
LL1
1 - V2 - Sensed V3 - V4 - V5 - V
States

Exciter EXST1_PTI
RsT+11 1
1C
B
sTsT
++Σ
SVREFV
+
FDE
Exciter EXST1_PTI IEEE Type ST1 Excitation System Model
1A
A
KsT+
+
−
IM INV
IM AXV
T RM IN C IFDV V -K I
T RM AX C IFDV V -K I
1F
F
sKsT+
−
Model supported by PSSE
cE
ERRV+ Σ
3
4
12
FD
t
LL
F
1 - E before limit2 - Sensed V3 - V4 - V
States

Exciter EXST2
RsT+11
Σ
REFV
Exciter EXST2 IEEE Type ST2 Excitation System Model
Σ+
−+
1A
A
KsT+
RMAXV
RMINV
1
EsT
EK
FDE+
−
1F
F
sKsT+
RV Σ−
πE P T I TV K V jK I= +TV
TI
( )EX NF f I=C FDN
E
K IIV
=FDI NI
EXF
If 0 and 0, then 1P I BK K V= = =
Σ++ERRV
BV
FD MAXE
0
SV
+
EV
B C
Model supported by PSLFModel supported by PSSE does not include T and T inputs
CE3
4
5 12
FD
t
R
F
LL
1 - E2 - Sensed V3 - V4 - V5 - V
States
11
C
B
sTsT
++

Exciter EXST2A
RsT+11
Σ
REFV
Exciter EXST2A Modified IEEE Type ST2 Excitation System Model
Σ+
−+ 1
A
A
KsT+
RMAXV
RMINV
1
EsT
EK
FDE+
−
1F
F
sKsT+
RV Σ−
πE P T I TV K V jK I= +TV
TI
( )EX NF f I=C FDN
E
K IIV
=FDI NI EXF
If 0 and 0, then 1P I BK K V= = =
ERRV
FD MAXE
0
SV
+
EV
π
B C
Model supported by PSLFModel supported by PSSE does not include T and T inputs
FVBV
COMPV11
C
B
sTsT
++
3
4
5 12
FD
t
R
F
LL
1 - E2 - Sensed V3 - V4 - V5 - V
States

Exciter EXST3
RsT+11
Σ
REFV
Exciter EXST3 IEEE Type ST3 Excitation System Model
Σ+−
+
11
CJ
B
sTKsT
++
FDEAV π
π( )E P T I P L TV K V j K K X I= + +TV
TI
( )EX NF f I=C FDN
E
K IIV
=FDI NI EXF
ERRV
BV
F D M A XE
SV
+
EV
∑ 1A
A
KsT+
RMAXV
RMINV
RV+
IM INV
IM AXV
GK
−GV
GMAXV
Model supported by PSSEModel supported by PSLF includes speed multiplier that is not implemented in Simulator
CE
PjP PK K e θ=
3 12
R
t
1 - V2 - Sensed V3 - LL
States

Exciter EXST3A
Exciter EXST3A IEEE Type ST3 Excitation System Model
11
CJ
B
sTKsT
++
FDEAV π
π( )E P T I P L TV K V j K K X I= + +TV
TI
( )EX NF f I=C FDN
E
K IIV
=FDI NI EXF
BV
EV
∑ 1A
A
KsT+
RMAXV
RMINV
+
IM INV
IM AXV
GK
−GV
GMAXV
Model supported by PSLF
RsT+11
Σ+
−
CESV
REFV+
BMAXV
SpeedPj
P PK K e θ=
3 12
R
t
1 - V2 - Sensed V3 - LL
States

Exciter EXST4B
Exciter EXST4B IEEE Type ST4B Excitation System Model
FDEπ
π( )E P T I P L TV K V j K K X I= + +
( )EX NF f I=C FDN
E
K IIV
=FDI NI
EXF
BV
EV
∑ IMPM
KKs
+
MMAXV
MMINV
+
RM INV
RM AXV
GK
−
Model supported by PSLF
RsT+11
Σ+
−
CESV
REFV+
BMAXV
11 AsT+
IRPR
KKs
+MV
TV
TI
PjP PK K e θ=
34 12
MInt
t
A
R
1 - V2 - Sensed V3 - V4 - V
States

Exciter EXWTG1
Exciter EXWTG1 Excitation System Model for Wound-Rotor Induction Wind-Turbine Generators
∑
MAXR
MINR
+
Model supported by PSLF
+−Rω 1
1 AsT+ EXT FDR (E )
REFω
1DP
DP
sKsT+EP
WK 1
2
11
W
W
sTsT
++ +
+
EXTR
∑
3
12
external1 - R2 - SpeedReg3 - Washout
States

Exciter EXWTGE
Exciter EXWTGE Excitation System Model for GE Wind-Turbine Generators
∑
Model supported by PSLF
+− 1
1 CsT+ORDQ
RFQ REFV (V )
11 PsT+
EP
1
Nf
1PV
V
KsT+
+
+∑
RsT+11
IVKs
M INQ
M AXQ
π
tan( )⋅FAREF REFP (V ) REF
REF
Q(V ) Switch 0=
Switch 1=
ORDQ
Switch 1= −
Switch 1=
Switch 0=
ORD
REF
Q from separate model(V )
WindVAR Emulation
OpenLoop Control
M INQ
M AXQ
CMDQ
pfaflg
varflg
+−GENQ
∑QIKsCMDQ
MAXV
MINV
+−
TERMV
∑REFV VIKs
TERM QMAXV + XI
TERM QMINV + XI
Q CMD FDE '' (E )
÷ORD SFrom Wind Turbine Model
P (V ) PCMD FDI (I )
PM AXI
To Generator M odel
R E GV
3
4
5
1
2
ref"QCMD
PV
regMeas
IV
ORD
Meas
1 - V
2 - E3 - K4 - V
5 - K6 - Q7 - P
States
6
7

Exciter IEEET1
RsT+11
Σ 1A
A
KsT+
RMAXV
RMINV
REFV
SV
+
−+
Σ1
EsT
EK
E E FDV S E= ⋅
+
−
+
+
EV
FDE
Σ
Exciter IEEET1 IEEE Type 1 Excitation System Model
RVΣ−
+
1F
F
sKsT+
Model supported by PSSEModel supported by PSLF includes speed multiplier that is not implemented in Simulator
CE
3
4
1
2
t
R
F
1 - EField2 - Sensed V3 - V4 - V
States

Exciter IEEET2
RsT+11
Σ 1A
A
KsT+
RMAXV
RMINV
REFV
SV
+
−+
Σ1
EsT
EK
E E FDV S E= ⋅
+
−
+
+
EV
FDE
Σ
Exciter IEEET2 IEEE Type 2 Excitation System Model
RVΣ−
+
11F
F
sKsT+2
11 FsT+
Model supported by PSSE
CE
3
45
1
2
t
R
F1
F2
1 - EField2 - Sensed V3 - V4 - V5 - V
States

Exciter IEEET3
RsT+11
Σ 1A
A
KsT+
RMAXV
RMINV
REFV
SV
+
−+
Σ1
E EK sT+
+
+
FDE
Exciter IEEET3 IEEE Type 3 Excitation System Model
RVΣ−
+
20.78
If 1, 0
FD
THEV
B
IAV
A V
⎛ ⎞⋅= ⎜ ⎟⎝ ⎠> =
1F
F
sKsT+
0
BM AXV
BV
πTHEV P T I TV K V jK I= +TV
TI
1 A−FDI
Model supported by PSSE
CE
3
4
12
t
R
F
1 - EField2 - Sensed V3 - V4 - V
States

Exciter IEEET4
Σ1
RHsT
RMAXV
RMINV
REFV
+
− Σ1
E EK sT+
+ FDE
Exciter IEEET4 IEEE Type 4 Excitation System Model
RVRHVVΔV K<ΔV
π
ψ
ES
−
Model supported by PSSE
CE
RMAXV
RMINVKV
-KV
1
-1RK
R-K
VΔV K>
12
RH
1 - EField2 - V
States

Exciter IEEET5
Σ1
RHsT
+
− Σ1
E EK sT+
+
Exciter IEEET5 Modified IEEE Type 4 Excitation System Model
RMAXV
π
ψ
ES
−
Model supported by PSSE
CE
RMAXV
RMINVKV
-KV
RMAXV
RMINV
REFV
FDE
RVRHV
VΔV K<ΔV
VΔV K>
12
RH
1 - EField2 - V
States

Exciter IEEEX1
RsT+11 1
1C
B
sTsT
++Σ
SVREFV
+
Exciter IEEEX1 IEEE Type 1 Excitation System Model
Σ+
−+
ERRV 1A
A
KsT+
RMAXV
RMINV
Σ1
EsT
E EK S+
FDE+
−
11F
F
sKsT+
FVRV
Regulator
D am ping
−
Model supported by PSSE
CE3 4
5
12
t
B
R
F
1 - EField2 - Sensed V3 - V4 - V5 - V
States

Exciter IEEEX2
Exciter IEEEX2 IEEE Type 2 Excitation System Model IEEEX2
Model supported by PSSE
RsT+11 1
1C
B
sTsT
++Σ
SVREFV
+
Σ+
−
+ERRV 1A
A
KsT+
RMAXV
RMINV
Σ1
EsT
E EK S+
FDE+
−FV
RV
Regulator
D am ping
−
CE
( ) ( )1 21 1F
F F
sKsT sT+ +
3 4
5
12
t
R
F1
F2
1 - EField2 - Sensed V3 - LL4 - V5 - V6 - V
States
6

Exciter IEEEX3
RsT+11
Σ
SVREFV
+
Exciter IEEEX3 IEEE Type 3 Excitation System Model
Σ+
− +
ERRV 1A
A
KsT+
RMAXV
RMINV
Σ1
E EK sT+FDE+
+
1F
F
sKsT+
FV
Regulator
Damping
−
0
THEV P T I TV K V jK I= +TV
TI0
BM AXV
( )22 0.78TH FDV I−THV
FDI
BV
Model supported by PSSE
CE
RV
3
4
12
t
R
F
1 - EField2 - Sensed V3 - V4 - V
States

Exciter IEEEX4
RsT+11
REFV
Exciter IEEEX4 IEEE Type 4 Excitation System Model
Σ+
− ERRV RMAX RMIN
V RH
V VsK T
−
RMAXV
RMINV
If , If , If ,
ERR V R RMAX
ERR V R RH
ERR V R RMIN
V K V VV K V VV K V V
≥ =
< =
≤− =
RHV
VK−
VK
Σ1
EsT
E EK S+
FDE+
−RV
Model supported by PSSE
CE
3
1
2
t
RH
1 - EField2 - Sensed V3 - V
States

Exciter IEET1A
Σ
REFV
Exciter IEET1A Modified IEEE Type 1 Excitation System Model
Σ+
− +
1A
A
KsT+
RMAXV
RMINV
Σ1
EsT
E EK S+
FDE+
−
1F
F
sKsT+
−
SV
FD M AXE
FD M INE+
Model supported by PSSE
CE
3
12
R
F
1 - EField2 - V3 - V
States

Exciter IEET1B
Σ
M AGI
+
+Σ
1
EsT+ FDE
Exciter IEET1B Modified IEEE Type 1 Excitation System Model
RV
π
ψ
ES
−
EK−
+RsT+1
1
EX
TV Σ
REFV
+SM AXV
SM INV
Σ− +
Bias
SV
Σ+
++
11A
A
KsT+
RMAXV
RMINV
2
11 AsT+ REGV
1
11F
F
sKsT+
−
Switch=0
Switch=1
Model supported by PSSE but not implemented yet in Simulator
CE

Exciter IEET5A
Σ 1A
RH
KsT+
RMAXV
RMINV
REFV
+
− Σ1
E EK sT+
+FDE
Exciter IEET5A Modified IEEE Type 4 Excitation System Model
RV
*
π
ψ
ES
−
Σ
TOV
+
− TΔV
FD M AXE
FD M INE
* If equals zero, block becomes ARH
KTs
Model supported by PSSE
CE
RMAXV
RMINVKV
-KV
VΔV K<
VΔV K>
12
RH
1 - EField2 - V
States

Exciter IEEX2A
RsT+11 1
1C
B
sTsT
++Σ
SVREFV
+
Exciter IEEX2A IEEE Type 2A Excitation System Model
Σ+
−+
ERRV 1A
A
KsT+
RMAXV
RMINV
Σ1
EsT
E EK S+
FDE+
−
11F
F
sKsT+
FVRV−
0
Model supported by PSSE
CE3 4
5
12
t
B
R
F
1 - EField2 - Sensed V3 - V4 - V5 - V
States

Exciter REXS
RsT+11
ΣSV
REFV
+
Exciter REXS General Purpose Rotating Excitation System Model
Σ+
−+
ERRV 1A
A
KsT+
RMAXV
RMINV
1
2
11
F
F
sTsT
++
FV
Regulator
−
0
RMIN RMAX FMIN FMAX TERMModel supported by PSLF. If flimf = 1 then multiply V ,V ,V , and V by V .
CE
IM AXV−
IM AXV
1F
F
sKsT+
VIVP
KKs
+ 1 2
1 2
(1 )(1 )(1 )(1 )
C C
B B
sT sTsT sT
+ ++ +
ΣΣ IIIP
KKs
++
RV
11 PsT+
FMAXV
FMINVHK
Σ1
EsT
E EK S+
DK
π
( )EX NF f I=
C FDN
E
K IIV
=
+−
+
+
EV
EXF
FDI
Σ
NI
FDE+
0
Speed
CXTERMI
CMAXV
EFDK
RV
−
+ +
FEI0
1
2
Fbf
34
5
1
2 E
T I
F I
R
1 - V 6 - Voltage PI2 - Sensed V 7 - V LL13 - V 8 - V LL24 - Current PI 9 - Feedback5 - V 10 - Feedback LL
States6
87
10
9

Exciter REXSY1
Exciter REXSY1 General Purpose Rotating Excitation System Model
Model supported by PSSE
RsT+11
Σ
SV
REFV
+
Σ+
−+
11 AsT+
RMAXF V⋅
RMINF V⋅1
2
11
F
F
sTsT
++
FV−
IM AXV−
IM AXV
1F
F
sKsT+
VIVP
KKs
+ 1 2
1 2
(1 )(1 )(1 )(1 )
C C
B B
sT sTsT sT
+ ++ + RV
0
1
2FEI
FDE
0II
IPKKs
+1
1 PsT+
FMAXF V⋅
FMINF V⋅HK
Σ1
EsT
E EK S+
π
( )EX NF f I=
C FDN
E
K IIV
=
−
+
+
EV
EXF
FDI
ΣNI
FDE+
CXTERMI
CMAXV
+
FEI
RV
DK
Σ+
−
[ ]1IMF T E D EF= 1.0 + F (E -1.0) (K +K +S )⋅CE
Exciter Field Current Regulator
Fbf
34
5
1
2
Voltage Regulator
E
T I
F I
R
1 - V 6 - Voltage PI2 - Sensed V 7 - V LL13 - V 8 - V LL24 - Current PI 9 - Feedback5 - V 10 - Feedback LL
States
6
7 8
910

Exciter REXSYS
Exciter REXSYS General Purpose Rotating Excitation System Model
Model supported by PSSE
RsT+11
Σ
SV
REFV
+
Σ+
−+
11 AsT+
RMAXF V⋅
RMINF V⋅1
2
11
F
F
sTsT
++
FV−
IM AXV−
IM AXV
1F
F
sKsT+
VIVP
KKs
+ 1 2
1 2
(1 )(1 )(1 )(1 )
C C
B B
sT sTsT sT
+ ++ + RV
0
1
2FEI
FDE
0II
IPKKs
+1
1 PsT+
FMAXF V⋅
FMINF V⋅HK
Σ1
EsT
E EK S+
π
( )EX NF f I=
C FDN
E
K IIV
=
−
+
+
EV
EXF
FDI
ΣNI
FDE+
+
FEI
RV
DK
Σ+
−
[ ]1IMP T E D EF= 1.0 + F (E -1.0) (K +K +S )⋅CE
Exciter Field Current Regulator
Fbf
34
5
1
2
Voltage Regulator
E
T I
F I
R
1 - V 6 - Voltage PI2 - Sensed V 7 - V LL13 - V 8 - V LL24 - Current PI 9 - Feedback5 - V 10 - Feedback LL
States
6
7 8
910

Exciter SCRX
REFV
Exciter SCRX Bus Fed or Solid Fed Static Excitation System Model
Σ+
−1 E
KsT+
FDMAXE
FDMINE
πFDE1
1A
B
sTsT
++
SV
+
TE 1SWITCHC =0 SWITCHC =1
SWITCH
Model supported by PSLFModel supported by PSSE has C 1=
CE
1 2
E
1 - Lead-Lag2 - V
States

Exciter SEXS_GE
compV
REFV
Exciter SEXS_GE Simplified Excitation System Model
+
−1 E
KsT+
MAXE
MINE
11
A
B
sTsT
++
StabilizerOutput
+
Model supported by PSLF
RsT+11 FDE( )1C C
C
K sTsT+
Σ
FDM INE
FDM AXE34 12
t
1 - EField2 - Sensed V3 - LL4 - PI
States

Exciter SEXS_PTI
CE
REFV
Exciter SEXS_PTI Simplified Excitation System Model
Σ+
−1 E
KsT+
FDMAXE
FDMINE
FDE11
A
B
sTsT
++
SV
+
Model supported by PSSE
12
1 - EField2 - LL
States

Exciter ST6B
RsT+11
UELVREFV
−FDE
Exciter ST6B IEEE 421.5 2005 ST6B Excitation System Model
RMAXV
RMINV
1G
G
sKsT+
−
OEL(OEL=2)
V
HVGate
LVGate
Alternate OEL Inputs
OEL(OEL=1)
V
+
RMULT
ST6B supported by PSSEESST6B supported by PSLF with optional V
CV
1IA DA
PADA
K sKKs sT
+ ++Σ
AMAXV
AMINV
Σ
π
CLK
GV
AV
TV
FD
t
G
1 - E2 - Sensed V3 - PID14 - PID25 - V
States
3 4
5
1
2
10 RMULTV
Σ
SV
+
+−
Σ MK Σ
FFK
LRK
BV
RMINV
LRI
FDI
+
−
+
−
++
RVΣ
11 SsT+

Exciter ST7B
RsT+11
REFV
FDE
Exciter ST7B IEEE 421.5 2005 ST7B Excitation System Model
1IA
IA
sKsT+
OEL(OEL=2)
V
LVGate
Alternate OEL Inputs
OEL(OEL=1)
V
+
ST7B supported by PSSEESST7B supported by PSLFNot implemented yet in Simulator
CV
++
−
LK
HK
Σ
11 SsT+
11
G
F
sTsT
++
HVGate
Alternate UEL Inputs
UEL(UEL=1)
V UEL(UEL=2)
V
MAXV
MINVΣ
+++
+
DROOPV
SCLVΣ Σ
REF_FBV
SV
PAK
HVGate
LVGate
11
C
B
sTsT
++
Σ Σ
Σ LVGate
HVGate
T RMAXV V
T RMINV V
OEL(OEL=3)
V UEL(UEL=3)
V
T RMAXV VT RMINV V
+
−
+
+

Exciter TEXS
CE
REFV
Exciter TEXS General Purpose Transformer-Fed Excitation System Model
Σ+
−FDE
1G
G
KsT+
SV
+
Model supported by PSLF
11 RsT+
IM AXV−
IM AXVVI
VPKKs
+
1VD
VD
sKsT+
RMAXV
RMINV
Σ++
Σ−
Σ+
+ Σ+
−
FFK
MK
RM INV
RM AXVLVGate π
CX
Σ+−
CLKLRI LRK
0
FDI
1 0
GeneratorTerminal Voltage
ConstantSource Voltage
RV EV+
3
4
1
2
t
1 - Feedback2 - Sensed V3 - Derivative Controller4 - Integral Controller
States

Exciter URST5T
CE
RsT+11
Σ
REFV
−+
Σ
CK
+
+
STBV FDI
FDE
Exciter URST5T IEEE Proposed Type ST5B Excitation System Model
UELV
HVGate
OELV
LVGate Σ
−
1
1
11
C
B
sTsT
++
RMAX RV /K
RMIN RV /K
2
2
11
C
B
sTsT
++
RMAX RV /K
RMIN RV /K
RMAXV
RMINV1
11 sT+
RMAX TV V
RMIN TV V
RK +
Model supported by PSSE
3 4 12
R
t
1 - V2 - Sensed V3 - LL14 - LL2
States

Exciter WT2E1
−
+
Exciter WT2E1 Rotor Resistance Control Model for Type 2 Wind Generator
elecP
MAXR
MINR
Model supported by PSSE
external
elec
1 - R2 - Speed3 - P
States
11 SPsT+
11 PCsT+
Σ1
PI
KsT
+
Speed
Power-Slip Curve
1
2
3

Exciter WT3E and WT3E1
Exciter WT3E and WT3E1 Electrical Control for Type 3 Wind Generator
∑
MAX wrat MIN wrat FV C
QCMD QMAX QMIN
WT3E supported by PSLF with RP P and RP -P , T TWT3E1 supported by PSSE uses vltflg to determine the limits on E . When vltflg > 0 Simulator always uses XI and XI .
= = =
+− 1
1 FVsT+
RFQV
11 PsT+
elecP
1
Nf
1PV
V
KsT+
+
∑RsT+1
1
IVKs
M INQ
M AXQ
π
tanFAREFP
REFQ
1
0
1−
Reactive Power Control Model
M INQ
M AXQ
varflg
−elecQ
QIKs
MINV
+−
∑REFV
QVKs
QMAXXI
QMINXI
QCMDE
CV
3
4
5
1 2
ref ORD
qppcmd Meas
PV
regMeas
IV ORD
1 - V 6 - Q2 - E 7 - P
3 - K 8 - PowerFilter4 - V 9 - SpeedPI
5 - K 10 - P
States
6
7
MAXV TERMVvltflg
+
0
0>
20( 20%, )PP ω=
100( 100%, )PP ω=
40( 40%, )PP ω=60( 60%, )PP ω=
( , )MIN PMINP ω
Speed
P
Active Power (Torque) Control Model
elecP1
1 PWRsT+∑ IP
PPKKs
+ π ∑1
FPsT ÷
M INRP
M AXRP PMAXIMAXP
MINP
1098
Speed Speed
−
++
−
TERMV
PCMDI
∑
+

Exciter WT4E1
Exciter WT4E1 Electrical Control for Type 4 Wind Generator
Model supported by PSSE but not yet implemented in Simulator
∑+
− 11 FVsT+
RFQV
11 PsT+
elecP
1PV
V
KsT+
+
∑1
1 RVsT+
IVKs
M INQ
M AXQ
π
tanFAREFP
10
M INQ
M AXQ
varflg
−elecQ
QIKs
MINCLV
+
−∑ VIK
s
QMAXI
QMINI
QCMDI
CV
MAXCLV
TERMV
+
elecP ∑ ÷PMAXI
−+
+
−
TERMV
PCMDI
∑
+
pfaflg
REFQ
01
ORDP
Converter Current Limitpqflag
∑
−
0.01
11 PWRsT+
IPPP
KKs
+
1F
F
sKsT+
REFP
MINdP
MAXdP

Machine Model CSVGN1
Model supported by PSSE
Σ−
Machine Model CSVGN1 Static Shunt Compensator CSVGN1
+
5
11 sT+
1.
/MINR RBASE
Other SignalsVOTHSG
REFV−
V ( ) ( )( )( )
1 2
3 4
1 11 1
K sT sTsT sT+ ++ +
MAXV
MINV
π+
−
/BASEC SBASE
YΣ
/MBASE SBASE
RBASE MBASE= is the voltage magnitude on the high side of generator step-up transformer if present.VNote :

Machine Model CSVGN3
Model supported by PSSE
Σ−
Machine Model CSVGN3 Static Shunt Compensator CSVGN3
+
5
11 sT+
1.
π+
−
/MINR RBASE
Other SignalsVOTHSG
REFV−
/BASEC SBASE
YERRV
V ( ) ( )( )( )
1 2
3 4
1 11 1
K sT sTsT sT+ ++ +
MAXV
MINV
1, if / if
ERR OV
ERR OV
V VRMIN RBASE V V
>
<−
Σ
/MBASE SBASE
RBASE MBASE= is the voltage magnitude on the high side of generator step-up transformer if present.VNote :

Machine Model CSVGN4
Model supported by PSSE
Σ−
Machine Model CSVGN4 Static Shunt Compensator CSVGN4
+
5
11 sT+
1.
π+
−
/MINR RBASE
Other SignalsVOTHSG
REFV−
/BASEC SBASE
YERRV
IBV ( ) ( )( )( )
1 2
3 4
1 11 1
K sT sTsT sT+ ++ +
MAXV
MINV
1, if / if
ERR OV
ERR OV
V VRMIN RBASE V V
>
<−
Σ
/MBASE SBASE
RBASE MBASE=

Machine Model CSVGN5
Model supported by PSSE
Machine Model CSVGN5 Static Var Compensator CSVGN5
−
6
11 sT+
MAXB
MINB
( )VREF I
+VOLT(IBUS)
VOLT(ICON(M ))or
EMAXV
EMAXV−
+
1
11 ssT+ Σ
+
( )VOTHSG I
Σ 2
3
11
S
S
sTsT
++
4
5
11
S
S
sTsT
++ SVSK
( )MBASE ISBASE ( )VAR L
( )' '
'
' '
If :If :
If :
ERR LO R MAX SD ERR
HI ERR LO R R
ERR HI R MIN
V DV B B K V DVDV V DV B B
V DV B B
> = + −< < =< =
ERRV RB
Fast Override
Thyristor Delay
'
'
If 0, /
/LO MAX SVS
HI MIN SVS
DVDV B K
DV B K
=
=
=
If 0,
LO
HI
DVDV DVDV DV
>==−
Filter
Regulator1st Stage 2nd Stage64444744448
'R
B SVSB

Machine Model CSVGN6
Model supported by PSSE
Machine Model CSVGN6 Static Var Compensator CSVGN6
−
6
11 sT+
MAXB
MINB
VREF
+VOLT(IBUS)
VOLT(ICON(M ))or
+
1
11 ssT+ Σ
+
OtherSignals
( )VOTHSG I
Σ 2
3
11
S
S
sTsT
++
4
5
11
S
S
sTsT
++ SVSK
( )' '
'
' '
If :If :
If :
ERR LO R MAX SD ERR
HI ERR LO R R
ERR HI R MIN
V DV B B K V DVDV V DV B B
V DV B B
> = + −< < =< =
ERRV RB
Fast Override
Thyristor Delay
'
'
If 0, /
/LO MAX SVS
HI MIN SVS
DVDV B K
DV B K
=
=
=
If 0,
LO
HI
DVDV DVDV DV
>==−
Filter
'R
B SVSB
MAXV
MINV
EMAXV
EMINV
++
Σ
Position 1 is normal (open)If 2, switch willclose after cycles.
ERRV DVTDELAY
>
1 2
BIAS
BSHUNT
+
RB

Machine Model GENCC
fdE+
−
Machine Model GENCC Generator represented by uniform inductance ratios rotor
modeling to match WSCC type F
−
+
−
'
1
dosT
'
' ''d d
d d
X XX X
−−
Model supported by PSLF
''
'd d
d d
X XX X
−−
' ''d dX X−
'qE '
qE''
1
dosTΣ
di
1EeS
q
d
XX
q axis
d axis
−Σ
π

Machine Model GENCLS
Machine Model GENCLS Synchronous machine represented by “classical” modeling or
Thevenin Voltage Source to play Back known voltage/frequency signal
Model supported by PSLF
R ecordedV oltage
R espondingS ystem0.03
on 100 M V A baseabZ =
A B
gencls
R espondingS ystem
ppdI
B
R espondingS ystem0.03
on 100 M V A baseabZ =
A Bgencls
ppdI

Machine Model GENROU
fdE+
Machine Model GENROU Solid Rotor Generator represented by equal mutual
inductance rotor modeling
+
+'
1
dosT
''
'd l
d l
X XX X
−−
Model supported by PSLF
''dP
di
−
fdP
' ''
'd d
d l
X XX X
−− Σ
'd lX X−
+ ''
1
d os T−
ΣkdP−
+
+
+
'd dX X−
Σ
''dP
+
+
Σ
''P
''
( )q l
qd l
X XP
X X−
−
eS
Σ
' ''
'( ) * *2d d
d l
X XX X
−−
d AXIS−
ad fdL i
*** , q AXIS identical swapping d and q substripts−

Machine Model GENSAL
fdE+
Machine Model GENSAL Salient Pole Generator represented by equal mutual
inductance rotor modeling
+
+'
1
dosT
''
'd l
d l
X XX X
−−
Model supported by PSLF
''dP
di
−
fdP ' ''
'd d
d l
X XX X
−− Σ
'd lX X−
+ ''
1
d os T−
ΣkdP−
++
+
'd dX X−
Σ
+
+
Σ
' ''
'( ) * *2d d
d l
X XX X
−−
d AXIS−
ad fdL iΣ
''
1
q os T−
Σ kdP−
''q qX X−
''qP
qiq AXIS−
e fdS P

Machine Model GENTPF
fdE+
−
Machine Model GENTPF Generator represented by uniform inductance ratios rotor
modeling to match WSCC type F
−
+
−
'
1
dosT
'
' ''d d
d d
X XX X
−−
Model supported by PSLF
''
' ''d d
d d
X XX X
−−
' ''d dX X−
'qE '
qE''
1
dosT
di
−Σ
eS
eS Σ''dϕ
( )
( )
1 .
A x is S im ilar ex cep t:
1 .
e ag
qe ag
d
S fsa t
QX
SX
ϕ
ϕ
= +
−
= +

Machine Model GENTRA
fdE+
Machine Model GENTRA Salient Pole Generator without Amortisseur Windings
+
Model supported by PSLF
di
−
'dX
'd dX X−+
+
d AXIS−
ad fdL i
qX qiq AXIS−
eS
'
1
d os T Σ−
Σ
Σ

Machine Model GENWRI
MECHP+
−
Machine Model GENWRI Wound-rotor Induction Generator Model with Variable External
Rotor Resistance
−
+1
2Hs
Model supported by PSLF
rω slip0ω÷Σ
ELECP
Σ
Sf
( )( )
( )( )( )
( )( )
'0
'0
'
'0
'
'0
'
'
2
22 2
( )
( )
s l
s
fd d s dfd fq
fq q s qfq fd
d fd
q fq
L LR T p o
L L
R T p oTR ex R
S L L is l ip
T
S L L is l ip
T
−=
−
=+
+ + −= − +
+ + −= − +
=
=
&
&
ω
ϕϕ ϕ
ϕϕ ϕ
ϕ ϕ
ϕ ϕ
( ) ( )( )( )( )
' '
' '
2 2' ' '
'
'
'
q s d d a q
d s q q a d
d q
e sat
d e d
q e d
e Li R i
e Li R i
S f
S S
S S
= − −
= − + −
= +
=
=
=
ω ϕ
ω ϕ
ϕ ϕ ϕ
ϕ
ϕ
ϕ
'0R 2 T p o i s a c o n s t a n t w h i c h i s e q u a l t o T t i m e s
t h e t o t a l r o t o r r e s i s t a n c e . R 2 i s t h e i n t e r n a l r o t o r r e s i s t a n c e R 2 e x i s t h e i n t e r n a l r o t o r r e s i s t a n c e

Machine Model GEWTG
''
( )q cmdEefd
Fromexwtge
Machine Model GEWTG Generator/converter model for GE wind turbines – Doubly Fed Asynchronous Generator (DFAG) and
Full Converter (FC) Models
11 0.02s+
Model supported by PSLF
0s
1''X
−
PlvI11 0.02s+
1s
( )PcmdI
ladifdFrom
exwtge
sorcI
''jX
H igh V oltageR eactive C urrent
M anagem ent
Low V oltageA ctive C urrentM anagem ent
11 0.02s+
2sV
LVPL
xerox(0.5pu)
brkpt(0.9pu)
LowVoltage Power Logic
1.11
LVPL
& LVLP rrpwr
VtermV
Figure 1. DFAG Generator / Converter Model

''
( )q cmdEefd
Fromexwtge
Machine Model GEWTG Generator/converter model for GE wind turbines – Doubly Fed Asynchronous Generator (DFAG) and
Full Converter (FC) Models
11 0.02s+
Model supported by PSLF
0s
1−
PlvI11 0.02s+
1s
( )PcmdI
ladifdFrom
exwtge
sorcIH igh V oltageR eactive C urrent
M anagem ent
Low V oltageA ctive C urrentM anagem ent
11 0.02s+
2sV
LVPL
xerox(0.5pu)
brkpt(0.7pu)
LowVoltage Power Logic
1.11
LVPL
& LVLP rrpwr
VtermV
Figure 1. Full Converter Generator / Converter Model

Machine Model MOTOR1
Machine Model MOTOR1 “Two-cage” or “one-cage” induction machine
Model supported by PSLF
1
1
o r
lr
RL
ω
o SL IPω1drψ
Σ1
1 .
lrL
+
−+
+1qrψ
2
2
o r
lr
RL
ω
o SL IPω
Σ
2drψ
Σ2
1 .
lrL
+
−+
−2qrψ
''m satLΣ
+
+
'' ''d qE ψ− =
''m satL qsi
Σ
eS
mψ
1. ( )sat e mK S ψ= +
''
1 2
1./ 1. / 1. /m sat
sat m lr lr
LK L L L
=+ +
Σ
2
2
o r
lr
RL
ω
o SL IPω2qrψ
Σ2
1 .
lrL
+
−+
+2drψ
1
1
o r
lr
RL
ω
o SL IPω
Σ Σ1
1 .
lrL
+
−+
+1drψ
Σ
1qrψ
''m satL
+
+ Σ
+
−
2 2md mqψ ψ+
''m satL dsi
−Σ+
'' ''q dE ψ=
' '1
'' ''1 2
' '1 1 1 1
'' ' '' '2 2 2 2
1. / (1. / 1. / )
1. / (1. / 1. / 1. / )
/ ( ) ( ) / ( )
/ ( ) ( ) / ( )
m s l
m m lr l
m m lr lr l
o lr m o r m lr m o r
o lr m o r m lr m o r
L L L
L L L L L
L L L L L L
T L L R L L L R
T L L R L L L R
ω ω
ω ω
= −
= + = −
= + + = −
= = +
= = +
mqψ
mdψ

Machine Model SVCWSC
Machine Model SVCWSC Static Var device compatible with WSCC Vx/Wx models
+
+Σ
11
S12
1+sT1+sT
S13
S14
sT1+sT
S3K
Input 1
Input 2
Model supported by PSLF
EM INV
EM AXV
RETV
SVSBC
S1
1+sT1+sTΣ+
−
CX
S2
S3
1+sT1+sT
S4
S5
1+sT1+sT SVSK
1MAXV
1MINV
2*VC MAXK V
2*VC MINK V
Σ Σ
SCS S
S
V VV (from external PSS)
+
S6
11+sT
F as tO v e rR id e
MAXB
MINB
π
BUSV
S1
S7
K1+sT
8
S9
1+ sT1+sT
S2
S10
K1+sT
+
+ +
−
SCSM INV
SCSM AXV
SCSV
if Vbus<V1vcl, Kvc = 0.if Vbud>V2vcl for Tdvcl sec., Kvc =1.
Voltage Clamp Logic

Generator Other Model LCFB1
Turbine Load Controller Model LCFB1
mwsetP 1Ks
++
PK
−
+
bFMAXe
MAXe−db
db−
11 PELECsT+
Σ
genP
rmaxL
rmaxL−
rmaxL
rmaxL−
Σ +
+
0refP
Σ refP
Model supported by PSLF
Σ
Frequency Bias Flag - fbf, set to 1 to enable or 0 to disablePower Controller Flag - pbf, set to 1 to enable or 0 to disable
Freq
1.0 +
−
−
elec
I
1 - P Sensed2 - K
States
1
2

Governor BPA GG
Governor BPA GG WSCC Type G Governor Model
Model in the public domain, available from BPA
mech1 - P2 - Lead-Lag 13 - Integrator 34 - Integrator 4
States
'1K Δω 2
1
11
sTsT
++ Σ
+
−
M OP
MAXP+
−3
11 sT+ 4
11 sT+
5
5
11
sFTsT
++
MPM eP -P
eP
Σ2 3 4 1

Governor BPA GH
Governor BPA GH WSCC Type H Hydro-Mechanical Governor Turbine Model
Model in the public domain, available from BPA
1(1 )G PT sT+
UPP&
−−
1s /2
11
W
W
sTsT−+
'1K Δω
DOWNP&
0P XRMAX(P.U.)P
MINP =0
R
Σ+
+
1d d
d
SD TsT+
Σ+
PILOT VALVE GATE SERVO TURBINE
MP23
4
1
mech1 - P2 - P gate valve3 - y34 - Feedback
States

Governor BPA GIGATB, BPA GJGATB, BPA GKGATB, and BPA GLTB
Governor BPA GIGATB, BPA GJGATB, BPA GKGATB, and BPA GLTB
No block diagrams have been created

Governor BPA GSTA
Governor BPA GSTA WSCC Type S Steam System Governor
And Nonreheat Turbine (Type A) Model
Model in the public domain, available from BPA
−−
1s
1K Δω
0PMAX(P.U.)P
MIN(P.U.)P
+GVP
2
1
11
sTsT
++ 3
1T
UPP&
DOWNP&
Σ1
1 CHsT+MP23 1
mech1 - P2 - P gate valve3 - Lead-lag
States

Governor BPA GSTB
Governor BPA GSTB WSCC Type S Steam System Governor and Tandem Compound
Single Reheat Turbine (Type B) Model
Model in the public domain, available from BPA
−−
1s
1K Δω
0PMAX(P.U.)P
MIN(P.U.)P
+
GVP2
1
11
sTsT
++ 3
1T
UPP&
DOWNP&
Σ
MP
11 CHsT+
11 RHsT+
11 COsT+
HPF IPF LPF
++
++
ΣΣ
2
3 4 5
1
1 - P gate valve2 - Lead-lag3 - y34 - y45 - y5
States

Governor BPA GSTC
Governor BPA GSTC WSCC Type S Steam System Governor and Tandem Compound
Double Reheat Turbine (Type C) Model
Model in the public domain, available from BPA
−−
1s
1K Δω
0PMAX(P.U.)P
MIN(P.U.)P
+
GVP2
1
11
sTsT
++ 3
1T
UPP&
DOWNP&
Σ
MP
11 CHsT+ 1
11 RHsT+ 2
11 RHsT+
VHPF HPF IPF
++
++
Σ
11 COsT+
LPF
++
Σ Σ
2
3 4 5 6
1
1 - P gate valve2 - Lead-lag3 - y34 - y45 - y56 - y6
States

Governor BPA GWTW
Governor BPA GWTW WSCC Type W Hydro Governor System
And Hydro Turbine (Type W) Model
Model in the public domain, available from BPA
−
KΔω
0P
+GVP
2
1 3
1(1 )(1 )
sTsT sT+
+ +
MAX/100P
MIN/100P
Σ1
1 0.5W
W
sTsT
−+
MP
2 3
1
mech1 - P2 - y03 - y1
States

Governor CCBT1
Governor CCBT1 Steam Plant Boiler/Turbine and Governor Model
MIN4
Σ
Model supported by PSLFProportional-integral blocks 1-6 also have rate limits not shown in the block diagram
Σ
11 WsT+
1
DsT
11 FsT+
11
IP
KKs
+
77
71D
PD
sKKsT
++
Σ
44
IP
KKs
+
Σ
Σ
33
IP
KKs
+
Σ1 r
rpelec
rvalve
ΣBK
-dbd
+dbd Σ
MAX4
MIN3
MAX3
Σ
MIN7
MAX7
Σ
MIN2
22
IP
KKs
+
MAX2
MIN5
55
IP
KKs
+
MAX5
1.0
MIN6
66
IP
KKs
+
MAX6
MIN1
MAX1
Σ
π
πPK
π
1 ah−
ah
1
RHsT
1PLM
PLM
KsT+
Σ
Σ
11 GsT+
IGOVPGOV
KKs
+
MINV
MAXV
Σ Σ
11 PelecsT+
-1
0
refω Speed
1.0
Speed
mechP
Valve Bias
mechP
refL
Bias
refPresslmref refP •Press
genP
Σ
+
−
−
−
++
−
− −
−−
−
−
−
−−
−−
+
+
+
+
++
++
++
+
++
++
2
3
4
5
6
1
7
8 9
10
11
12
+
13
14 1550PLMT =
Σ

Governor CRCMGV
(HP)Speed ( )
1( )
1 /1
HP
HP
RsT+ Σ
+
mech(HP)P
Governor CRCMGV Cross Compound Turbine-Governor Model
( )( )( )( ) 5( )
3( ) 4( ) 5( )
11 1 1
HP HP
HP HP HP
sF TsT sT sT
+
+ + +−
Reference
MAX(HP)P
0
+
( )
1( )
1 /1
LP
LP
RsT+ Σ
+
( )( )( )( ) 5( )
3( ) 4( ) 5( )
11 1 1
LP LP
LP LP LP
sF TsT sT sT
+
+ + +−
ReferenceMAX(LP)P
0
+
( )( )2( )H HP T HPD E −
Σ−
+
( )( )2( )H LP T HPD E −−
Σ−
(LP)SpeedΣ
High-Pressure Unit
Low-Pressure Unit
mech(LP)P−
Model supported by PSLF and PSSE
2 3 4
5
6
1
1 - HPInput2 - HPState13 - HPState24 - HPState35 - LPInput6 - LPState17 - LPState28 - LPState3
States
7 8

Governor DEGOV
Governor DEGOV Woodward Diesel Governor Model
( )( )( )
4
5 6
11 1
Actuator
K sTs sT sT
++ +
144424443
MAXT
MINT
π( )32
1 2 1
11
Electric Control Box
sTsT s T T− ++ +
1442443
1+Speed
{Engine
DsTe−mechP
Model supported by PSSE
2
3 4 5
1
1 - Control box 12 - Control box 23 - Actuator 14 - Actuator 25 - Actuator 3
States
ΔωSpeed

Governor DEGOV1
Governor DEGOV1 Woodward Diesel Governor Model
( )( )( )
4
5 6
11 1
Actuator
K sTs sT sT
++ +
144424443
MAXT
MINT
πΔωSpeed
1+Speed
{Engine
DsTe−mechP( )3
21 2 1
11
Electric Control Box
sTsT s T T− ++ +
1442443
+
−
11 EsT+
SBASEMBASE
elecPDROOP
Σ−
refP
1
0
Model supported by PSSE
6
Droop Control
1 - Control box 12 - Control box 23 - Actuator 14 - Actuator 25 - Actuator 36 - Droop Input
States
21
3 4 5

Governor G2WSCC
Governor G2WSCC Double Derivative Hydro Governor and Turbine
Represents WECC G2 Governor Plus Turbine Model
G VN
Δω(Speed) eps
1db
11 DsT+
1
1 F
sKsT+
22
2(1 )F
s KsT+
+
+
+
R1
1 TsT+elecP
1G
P
KsT+
OPENVEL
CLOSEVEL
1s
MAXP
MINP
2d b
GV 11
tu r b tu r b
tu r b tu r b
s A Ts B T
++
GVPmechP
+−
Σ
T(T =0)
refP
Model supported by PSLF
+−Σ IK
s−
Σ2 3
4 5
6
1
mech
D
1
2
2
elec
1 - P2 - T3 - K4 - K first5 - K second6 - Integrator7 - P Sensed8 - Valve9 - Gate
States
8 9
7
GV1, PGV1...GV6, PGV6 are the x,y coordinates of blockGVN

Governor GAST_GE
Governor GAST_GE Gas Turbine-Governor Model
refP ( )4
5
11
AK sTsT+
+
+
+
+
Model supported by PSLF
+
−
2
2
11
AsTBsT
++
−
eps
0db
Δω(Speed)
3
11 sT+
1
1sT
MAXV
MINV
LIMR
1R
Σ
IDLEF
TK
Σ
ΣIDLEF
MAXL
Σ +−
VG
GVP d b b
mechP
11 LTRsT+
+
−
V INC LIM TRAT
LIM MAX
if (D >L ) R =L else R =R Σ
VD
Σ
−
2
3
4
5
1 LVGATE
1 - Input LL2 - Integrator3 - Governor LL4 - Load Limit5 - Temperature
States
GV1, PGV1...GV6, PGV6 are the x,y coordinates of vs. blockGVP GV

Governor GAST_PTI
Governor GAST_PTI Gas Turbine-Governor Model
MAXV
refLoad mechP−
+
turbD
−
1R
Σ
MINV
1
11 sT+ 2
11 sT+
LVGate Σ+
Speed
3
11 sT+TK+ −
+
ΣΣ+
TA (Load Limit)
Model supported by PSSE
2
3
1
1 - Fuel Valve2 - Fuel Flow3 - Exhaust Temperature
States

Governor GAST2A
Governor GAST2A Gas Turbine-Governor Model
LowValueSelect
( )1W sXsY Z
++
+Σ−
ReferencesTe−
MAX
MINSpeed
GovernorSpeed
Control
3K +
FuelControl
AC sB+
11 Fsτ+
CRsEe−
FK
6K
Σ+
−
ValvePositioner
FuelSystem fW
FuelFlow
TDsEe−
51
T
sTsτ+
MAX
+
4
11 sT+
54
31KKsT
++ 1fΣ −
TurbineExhaust
Turbine
RadiationShieldThermocouple
TemperatureControl*
CT
11 CDsT+
2fMBASE
RATET
+
Δω
1.0 +
π
Σ
π
mechP
( )1 R f1 f1f1f =T -A 1.0-w -B Speed⎛ ⎞
⎜ ⎟⎝ ⎠
( ) ( )f22 f2 f2 f2f =A -B w -C Speed
f2wTurbine
Gas TurbineDynamics
* Temperature control output is set to output of speed governor when temperature control input changes from positive to negative
Model supported by PSSE
2 3
45
7
1
f1w
1 - Speed Governor2 - Valve Positioner3 - Fuel System4 - Radiation Shield5 - Thermocouple6 - Temp Control7 - Turbine Dynamics
States
6

Governor GASTWD
Governor GASTWD Woodward Gas Turbine-Governor Model
LowValueSelect+
−
SpeedReference
sTe−
MAX
MIN
SpeedControl
3K +
FuelControl
AC sB+
11 Fsτ+
CRsEe−
FK
6K
Σ+
−
ValvePositioner
FuelSystem
fWFuelFlow
TDsEe−
5 1
T
sTsτ+
MAX
+ 4
11 sT+
54
31KKsT
++ 1fΣ −
TurbineExhaust
Turbine
RadiationShieldThermocouple
TemperatureControl*
11 CDsT+
2fMBASE
RATET
+
Δω
1.0 +
π
Σ
π
mechP
( ) ( )f =T -A 1.0-w -B Speed1 R f1 f1 f1 ( ) ( )f =A -B w -C Speed2 f2 f2 f2 f2
f2wTurbineGas Turbine
Dynamics
* Temperature control output is set to output of speed governor when temperature control input changes from positive to negative
IKs
PK
DsK
+
Σ++
SBASE
RATET
1DROOP
D
KsT+
Σ
elecP
eP
−
T Setpoint for CTemperature Control
Model supported by PSSE
2 3
45
6
1
f1w
1 - Power Transducer2 - Valve Positioner3 - Fuel System4 - Radiation Shield5 - Thermocouple6 - Temp Control7 - Turbine Dynamics8 - PID 1 9 - PID 2
States
78 9

Governor GGOV1
Governor GGOV1 – GE General Governor-Turbine Model
( / )dref turb fnlL K w+ +1
1 FloadsT+11
SA
SB
sTsT
++
mD**Dmm <If D 0, (Speed+1)m >If D 0, (Speed)
−
11
C
B
sTsT
++
engsTe−
turbK
Σ
PloadK
IloadKs
Σ
Σ
−
++
+
1.0
AK tΔ +
+ΣΣ
+
1 A
ssT+
−
drefL mechP
Speed
PgovK
IgovKs
1Dgov
Dgov
sKsT+
+
++
−+
maxerr
minerr
-dbdb
++
π
11 ACTsT+
MAXV
MINV
refPΣ
LowValueSelect
r
Σ
IMWKs
Σ
Σ+ −
11 PelecsT+
elecP
−Σ
fnlw
π
1.0 (Speed+1)governor outputvalve stroke
aset
−
IMW
UP DOWN CLOSE OPEN
Model supported by PSLFModel supported by PSSE does not include non-windup limits on K blockR , R , R , and R inputs not implemented in Simulator
+
2
3
4
5
6
1
Flag0 1
Rselect
11−
2−
mwsetP
1.1r
-1.1r
Timestep
elec1 - P Measured 5 - Turbine LL2 - Governor Differential Control 6 - Turbine Load Limiter3 - Governor Integral Control 7 - Turbine Load Integral Control4 - Turbine Actuator 8 - Supervisory Load Co
States
ntrol9 - Accel Control10 - Temp Detection LL
7
8
9
10
M INV
M AXV

Governor GGOV2
Governor GGOV2 - GE General Governor-Turbine Model
mwsetP
( / )dref turb fnlL K w+ +1
1 floadsT+11
sa
sb
sTsT
++
mD−
11
c
b
sTsT
++
engsTe−
turbK
Σ
ploadK
iloadKs
Σ
Σ
−
++
+
1.0
aK tΔ
5s 9s
6s
+
+ΣΣ
+
1 a
ssT+
8s
4s
−
drefL MECHP
Speed
pgovK
igovKs
1dgov
dgov
sKsT+
+2s+
+
−
1s
+
++
π
11 actsT+
ropenvmax
vminrclose
refPΣ
LowValueSelect
r
Σ
imwKs
Σ
Σ+ −
11 P elecsT+
ELECP
7s
0s
−Σ
fnlw3s
π
1.0
aset
−
+
M INV
M AXV
Frequency-dependent
limit
Speed
fsrt
fsra
fsrn
2 3 4 5 61
1.1r
-1.1r
Flag0 1
Timestep
**Dmm <If D 0, (Speed+1)m >If D 0, (Speed)
(Speed+1)
Rselect
11−
2−governor output
valve stroke
maxerr
minerr
-dbdb
Model supported by PSLF

Governor GGOV3
11
cd
bd
sTsT
++
Governor GGOV3 - GE General Governor-Turbine Model
mwsetP
( / )dref turb fnlL K w+ +1
1 floadsT+11
sa
sb
sTsT
++
mD −
11
c
b
sTsT
++
engsTe−
Σ
ploadK
iloadKs
Σ
Σ
−
+
+
+
1.0
aK tΔ +
+ΣΣ
+
1 a
ssT+
−
drefL MECHP
PercievedSpeed
pgovK
igovKs
1dgov
dgov
sKsT+
++
+
−+
++
π
11 actsT+
refPΣ
LowValueSelect
R
Σ
imwKs
Σ
Σ+ −
11 P elecsT+
ELECP
−
fnlw
π
1.0
aset
−
+
Σ
turbK
2
3 4
56
1
7
8
9
10
11
**Dmm <If D 0, (Speed+1)m >If D 0, (Speed)
1.1r
-1.1r
Flag0 1
Timestep
MAXV
MINV
UP DOWN CLOSE OPEN dnrate, R , R , R , and R inputs not implemented in Simulator
Rselect
11−
2−(Speed+1)governor output
valve stroke
MINV
MAXV
elec1 - P Measured 5 - Turbine LL 9 - Accel Control2 - Governor Differential Control 6 - Turbine Load Limiter 10 - Temp Detection LL3 - Governor Integral Control 7 - Turbine Load Integral Contro
States
l 11 - Fuel System Lead Lag4 - Turbine Actuator 8 - Supervisory Load Control
M a x err
Minerr
-dbdb
Model supported by PSLF

Governor GGOV3 - GE General Governor-Turbine Model
dnlo
PercievedSpeed
dnhi
ffa
ffb
slope = 1
slope = ffc
MeasuredSpeed
Nonlinear Speed Filter
FilteredSpeed
Rate limit dnrate not used in SimulatorModel supported by PSLF

Governor GPWSCC
Governor GPWSCC PID Governor-Turbine Model
G VN
err
1db
11 DsT+
1Ks
1D
f
sKsT+
+
+
+
R 11 tsT+
( 0)tT >
1G
P
KsT+
1s 2d b
GV 11
tu r b tu r b
tu r b tu r b
s A Ts B T
++
+ −
Σ
PK
Σ+
−
− CVΣ
GVP
0tT =
176
5
3
4
2
mechP
elecP
Δω(Speed)
refP
OPENVEL
CLOSEVEL
MAXP
MINP
GV1, PGV1...GV6, PGV6 are the x,y coordinates of blockGVN
mech elec
D
1 - P 5 - P Sensed2 - T 6 - Valve3 - Integrator 7 - Gate4 - Derivative
States
Model supported by PSLF

Governor HYG3
Governor HYG3 PID Governor, Double Derivative Governor, and Turbine
Δω1db
11 DsT+
IKs
1
1 f
sKsT+
+
+
+
11 tsT+
1G
P
KsT+
1s
MAXP
MINP
2d bGV
+−
2K
Σ+
−
−
g a teR
−
1db
11 DsT+
1
1 f
sKsT+
( )2
22
1 f
s K
sT+
+
+
e le cR1
1 tsT+
++
Σ IKs
Σ
−
−−
g a teR
Δω (speed-1)pu=
Δω
cflag>0
Σcflag<0
G VN GVP 1
WsT0H
π tA Σ
tu rbD
GVq/PqNL
Σ÷ πΣ+
− +
−
+−
H q
ΔωπΣ
G VPmechP
refP
refP
elecP
CV
CV
1
2
4 5
7
6
3
8
9
1
7
2
OPENVEL
CLOSEVEL
Model supported by PSLF
e le cR
Note: cflag determines numbering of states
D
1
i
W
elec
2
2
1 - T2 - K3 - K4 - Valve5 - Gate6 - T7 - P Sensed8 - K First9 - K Second
States
elecP
3
GV1, PGV1...GV6, PGV6 are the x,y coordinates of blockGVN
G V

Governor HYGOV
Governor HYGOV Hydro Turbine-Governor Model
+1
1 fsT+−
R
1 r
r
sTrT s+ 1
1 gsT+
turbD
−
tA Σ
πg
+−
2d b
G VP GV
11
n
np
sTsT
++
MAXG
MING
elmrate limit - V
1db
refP
1 2 3
G VN
G V
Δω
Δω
mechP1
WsTHdam=1
πqNL
Σ÷ πΣ+
− +
−
H 4GVP
GVq/P
Model supported by PSSE and PSLFRperm shown as R, Rtemp shown as r
Ttur, Tn, Tnp, db1, Eps, db2, Bgv0...Bgv5, Bmax, Tblade not implemented in SimulatorGV0, PGV0...GV5, PGV5 are the x,y coordinates of blockGVN
1 - Filter Output2 - Desired Gate3 - Gate4 - Turbine Flow
States

Governor HYGOV2
Governor HYGOV2 Hydro Turbine-Governor Model
MAXP
GM AXV
GMAX-V
−
−
+I PK sK
s+
1
3
1A
sTKsT
⎛ ⎞+⎜ ⎟⎝ ⎠
2
4
11
sTsT
++
1s
R 1temp R
R
sR TsT+
5
6
11
sTsT
−+
Σ −
1 2 3
4
5
6
1 - Filter Output2 - Governor3 - Governor Speed4 - Droop5 - Gate6 - Penstock
States
MING
mechP
refP
Model supported by PSSEMAX MINThe G G limit is modeled as non-windup in PSSE but as a windup limit in Simulator.
MAXGΔωSpeed

Governor HYGOV4
G VN
GVP
GV
Governor HYGOV4 Hydro Turbine-Governor Model
+ 11 psT+
−
1
gT1s
+
+−
1dbΔω ΣCU
OU
2d b
permR+
1r temp
r
sT RT s+
Σ
−
turbD
Σ
π
tA
Model supported by PSLF
mechP
refP MAXP
MINP
G V
1
WsTHdam
πqNL
Σ÷ πΣ+
− +
−
H 4
GVP GVq/P
q
3
21
GV0, PGV0...GV5, PGV5 are the x,y coordinates of blockGVN
W
1 - Velocity2 - Gate3 - Rtemp4 - T
States
Bgv0...Bgv5, Bmax, Tblade not implemented in Simulator

Governor HYST1
Governor HYST1 Hydro Turbine with Woodward Electro-Hydraulic PID Governor,
Surge Tank, and Inlet Tunnel
− ip
KKs
+Σ+
11 asT+
1d
a
sKsT+
Σ+
+
11 asT+
1perm
reg
RsT+
Σ +
−
11 bsT+
MAXG
MING
( )G s +
turbD
Σ−
GVP
GV
refP
genP
Δω
mechP
4
3
21
5
6
9
7
8
Model supported by PSLFNot yet implemented in Simulator

Governor IEEEG1
Governor IEEEG1 IEEE Type 1 Speed-Governor Model
−
−
HPΔω
SPEED
4
11 sT+
2
1
(1 )1
K sTsT++ 3
1T
CU
OU1s
MAXP
MINP
Σ
1K
5
11 sT+
3K
6
11 sT+
5K
7
11 sT+
7K
Σ Σ
2K 4K 6K 8K
Σ Σ
Σ
Σ
HPPMECH
LPPMECH
+
+
+
+
+
+
+
++
++
+
M1P
M2P
+
Model supported by PSLF includes hysteresis that is read but not implemented in SimulatorModel supported by PSSE does not include hysteresis and nonlinear gain
GVP
GV
1db
2db
3 4 5
12
1 - Governor Output2 - Lead-Lag3 - Turbine Bowl4 - Reheater5 - Crossover6 - Double Reheat
States
6refP
GV1, PGV1...GV6, PGV6 are the x,y coordinates of vs. blockGVP GV

Governor IEEEG2
Governor IEEEG2 IEEE Type 2 Speed-Governor Model
− 4
4
11 0.5
sTsT
−+
2
1 3
(1 )(1 )(1 )
K sTsT sT+
+ +
MAXP
MINP
Σ+
Model supported by PSSE
3
2 1
refP
mechP
mech1 - P2 - First Integrator3 - Second Integrator
States
ΔωSpeed

Governor IEEEG3_GE
Governor IEEEG3_GE IEEE Type 3 Speed-Governor Model IEEEG3
−
−
( )11
TURB TURB W
TURB W
K A sTB sT+
+
REFP
11 PsT+
1s
MAXP
MINP
+
1TEM P R
R
R sTsT+
+
+Σ
ΣCU
OU1
GT
GVP
GV
1db2db
GV GVP
Model supported by PSLF
32
1
mechP
PERMR
4
mech1 - P2 - Servomotor position3 - Gate position4 - Transient droop
States
PSLF model includes db1, db2, and Eps read but not implemented in Simulator
ΔωSpeed

Governor IEEEG3_PTI
Governor_IEEEG3_PTI IEEE Type 3 Speed-Governor Model IEEEG3
−
−
13 2123 11
23
11
1
1
W
W
a aa a sTa
a sT
⎡ ⎤⎛ ⎞+ −⎢ ⎥⎜ ⎟⎝ ⎠⎣ ⎦+
1(1 )G PT sT+
1s
MAXP
MINP
+
OU
CU
PERMR
1TEMP R
R
R sTsT+
+
+Σ
Σ
Model supported by PSSE
REFP
mechP32 1
4
mech1 - P2 - Servomotor position3 - Gate position4 - Transient droop
States
ΔωSpeed

Governor IEESGO
Governor IEESGO IEEE Standard Model IEEESGO
−Speed4
11 sT+
OP
1 2
1 3
(1 )(1 )(1 )
K sTsT sT
++ +
MAXP
MINPΣ+
21 K−
21 K−
3
61KsT+
2
51KsT+
Σ+
+ +
3
2
1
4 5
mechP
1 - First Integrator2 - Second Integrator3 - Turbine T44 - Turbine T55 - Turbine T6
States
Model supported by PSSE

Governor PIDGOV
Governor PIDGOV - Hydro Turbine and Governor Model PIDGOV
− ip
KKs
+Σ+
11 asT+
1d
a
sKsT+
Σ+
+
11 asT+
1perm
reg
RsT+
SBASEMBASE
Σ +
−
0
1
1
bT1s
MAXG
MING
MAXVel
MINVelGate
Power
12
3
11 2
Z
Z
sTsT−+
+
( )Z tw wT = A *T
turbD
Σ−
+
−Σ
Feedback signal
Model supported by PSSEModel supported by PSLF
3
2
1
4
5
6
7 mechP
REFP
elecP
(G0,0), (G1,P1), (G2,P2), (1,P3) are x,y coordinates of Power vs. Gate function
1 - Mechanical Output2 - Measured Delta P3 - PI4 - Reg15 - Derivative6 - Reg27 - Gate
States
ΔωSpeed

Governor TGOV1
Governor TGOV1 Steam Turbine-Governor Model TGOV1
1
11 sT+
MAXV
MINV
1R+
tD
−
2
3
11
sTsT
++
+
−Σ ΣREFP mechP2 1
1 - Turbine Power2 - Valve Position
States
Model supported by PSSEModel supported by PSLF
ΔωSpeed

Governor TGOV2
Governor TGOV2 Steam Turbine-Governor with Fast Valving Model TGOV2
1
11 sT+
MAXV
MINV
Reference MECHP1R+
tD
− 3
11
KsT−+
+
−Σ 1 t
vsT+
K
Σ+
I
A A
B B
T : Time to initiate fast valving.
T : Intercept valve, , fully closed T seconds after fast valving initiation.
T : Intercept valve starts to reopen T seconds after fast va
v
C C
lving initiation.
T : Intercept valve again fully open T seconds after fast valving initiation.
ΔωSpeed
Model supported by PSSE
321
4
CT
BT
AT
IT ( )I AT T+ ( )I BT T+ ( )I CT T+
Time, seconds
1.
0.
Inte
rcep
t Val
ve P
ositi
on
1 - Throttle2 - Reheat Pressure3 - Reheat Power4 - Intercept Valve
States

Governor TGOV3
RMAXP
Governor TGOV3 Modified IEEE Type 1 Speed-Governor with Fast Valving Model
−
−4
11 sT+
REFP
2
1
(1 )1
K sTsT++ 3
1T
CU
OU1sΣ
1K 2K
6
11 sT+
3K
Σ+
+
+
+
+
Σ
MAXP
MINP5
1sT
+ vΣ−
I
A A
B B
T : Time to initiate fast valving.
T : Intercept valve, , fully closed T seconds after fast valving initiation.
T : Intercept valve starts to reopen T seconds after fast va
v
C C
lving initiation.
T : Intercept valve again fully open T seconds after fast valving initiation.
CT
BT
AT
IT ( )I AT T+ ( )I BT T+ ( )I CT T+
Time, seconds
1.
0.
Inte
rcep
t Val
ve P
ositi
on
MECHP
Model supported by PSLFModel supported by PSSE
0 0.3
0.8
Intercept Valve Position
Flow
321
4 56
1 - LL2 - StateT33 - StateT44 - StateT55 - StateT66 - Intercept Valve
States
Gv1,Pgv1 ... Gv6, Pgv6 are x,y coordinates of Flow vs. Intercept Valve Position function
ΔωSpeed

Governor TGOV5
Governor_TGOV5 - IEEE Type 1 Speed-Governor Model Modified to Include Boiler Controls
−
+HPSPEED
ωΔ4
11 sT+
OP
2
1
(1 )1
K sTsT++ 3
1T
CU
OU1s
MAXV
MINV
1K
5
11 sT+
3K
6
11 sT+
5K
7
11 sT+
7K
Σ Σ
2K 4K 6K 8K
Σ Σ
Σ
Σ
HPPMECH
LPPMECH
+
+
+
+
+
+
++
++
++
1MP
2MP
−sm
1MW
MW
KsT+ELECP
−
−
B
fΔ
14K1s
−
MINR
MAXRMAXL
MINL
Σ +++
−
Σ
OPLK
ΣΣMWDemand
DesiredMW2C Σ
+
12K
+
13K
Σ
3C
+
+
SPP DPE−DPE
Dead Band
EP(Pressure Error)
π
( )( )( )1
1 11
I I R
R
K sT sTs sT+ ++
MAXC
EP
π
( )( )1 1
DsT
F W
esT sT
−
+ +
Fuel Dynamics
Σ+
−
++
1
BsC
−+
Σ11K
10K
Σ
TP
DP 9K
1CΣ
Σ− +
−
+ +
πOP
π
sm
sm
SPP
π
DesiredMW
MINC
Model supported by PSSE
TP
2 3 4 5 61

Governor URGS3T
Governor URGS3T WECC Gas Turbine Model
G V
G VP
2d b1
1sT
refP err
1db+
−
+4
5
(1 )1aK sT
sT+
+LVGATE
+
MAXV
MINV
2
2
11
AsTBsT
++
LIMR
+ mechP
TK3
11 sT+ΣΣIDLEF
MAXL
++ −
+
−
turbD
ΣΣ
IDLEF−
1R
Σ
Speed
−
11 LTRsT+
+Σ−
V INC LIM TRAT
LIM MAX
If (D >L ), then R = L else, R = R
Σ
VD
Model supported by PSSE
2
3
4
5
1
1 - Input LL2 - Integrator3 - Governor LL4 - Load Limit5 - Temperature
States
−
GV1, PGV1...GV5, PGV5 are the x,y coordinates of vs. blockGVP GV

Governor WT12T1
Governor WT12T1 Two-Mass Turbine Model for Type 1 and Type 2 Wind Generators
FromWT12AModel
Initial rotor slip
+−
Model supported by PSSE
Σ
Σ Σ
Σ
Σ
Σ
+
+
+
+ +
−
−
+
−
+
−
+
−
shaftD
Damp
12 tH s
12 gH s
1s
baseω
baseω
baseω Rotorangle
deviation
Σ shaftKs
elecT
mechT Speed
t tfrac
g t2
t gshaft
0
H =H×HH =H-H
2H ×H ×(2π×Freq1)K =
H×ω
1 - TurbineSpeed2 - ShaftAngle3 - GenSpeed4 - GenDeltaAngle
States
3
2
1
4

Governor W2301
Governor W2301 Woodward 2301 Governor and Basic Turbine Model
Speed
11 VsT+Valve Servo
+ Σ−
−GammaΣ
+
1 2Beta s+ ⋅
Σ+
−
11 psT+
1 0.5(1.05 )
Rho sBeta s Alpha
+ ⋅⋅ −
SpeedRef
+ Σ
gnl
−Turbine
PIController
+
mechP3
21
4
1 - PelecSensed2 - PI3 - Valve4 - Turbine
States
D
11
t turb
turb
sKTsT
++
refP
Model supported by PSLFGain, Velamx read but not implemented in Simulator.
Gmax
Gmin
elecP

Governor WEHGOV
Governor WEHGOV Woodward Electric Hydro Governor Model
0 (S p e e d d e a d b a n d )( ) (S p e e d d e a d b a n d ) (S p e e d d e a d b a n d )( ) (S p e e d d e a d b a n d ) (S p e e d d e a d b a n d )
O u t if E R RO u t E R R I if E R RO u t E R R I if E R R
= <= − >= + < −
Governor and Hydraulic Actuators
Model supported by PSSE
(*)
(*)
1
WsT0H =1
π÷ πΣ+
−H 4
ssq/q
Turbine Flow, qFlow
mssPGate position, g
Gate
Flow
ss
Steady-StateFlow, q mssP
+
−Σ mechP
g πturbDSpeed
−
IKs
Gmin-DICN
6
Gmax+DICN
Σ++
+
PKERR
Speed deadband
Σ Σ 1
DVsT11
1 PsT+
Gmin-DPV
Gmax+DPVPilot Valve
1D
D
sKsT+
Feedbacksignal=1 Feedback
signal=0
+
−
gGTMXCL*T
gGTMXOP*T
2
Gate position, g1s
3
Gmax
Gmin
1
gT1 PE
RpermPEsT+
7
−
Distribution Valve
RpermGate
0
Feedbacksignal
SBASEMBASE
elecP
Turbine Dynam ics
5
1 - Pilot Valve2 - DistributionValve3 - Gate4 - Turbine Flow5 - Derivative6 - Integrator7 - PelecSensed
States
(Gate 1, Flow G1)...(Gate 5, Flow G5) are x,y coordinates of Flow vs. Gate function(Flow P1, PMECH 1)...(Flow P10, PMECH 10) are x,y coordinates of Pmss vs. Flow function
+−
1−10
refP

Governor WESGOV
Governor WESGOV Westinghouse Digital Governor for Gas Turbine Model
*
Droop
ΔωSpeed
PK
+1
IsT ( )( )1 2
11 1sT sT+ +Σ+
11 pesT+
**
+
−
Σ
Reference
−
Digital Control ***
lim
* Sample hold with sample period defined by Delta TC.**Sample hold with sample period defined by Delta TP.
***Maximum change is limited to A between sampling times
.
mechP
elecP
32
1
4
1 - PEMeas2 - Control3 - Valve4 - PMech
States
Model supported by PSSElimA read but not implemented in Simulator

Governor WNDTGE
Governor WNDTGE Wind Turbine and Turbine Control Model for GE Wind Turbines
Model supported by PSLF
++
−
11 psT+
11 5s+
+
RotorModel
Over/UnderSpeed Trip
TripSignalω
rotorω
/pp ipK K s+
20.67 1.42 0.51elec elecP P− + +refω
cmdθ
WindPowerModel
BladePitch
θ
Σ
/ptrq itrqK K s+1
1 pcsT+π
ω
ordP
+
−/pc icK K s+ Σ
Σ
ω
Power ResponseRate Limit
Apcflg is set to zero. Limits on states 2 and 3 and trip signal are not implemented.
Anti-windup onPitch Limits
mechP
elecP
elecP
Anti-windup onPower Limits
Anti-windup on Pitch LimitsTorqueControl
Pitch Control
PitchCompensation
PIMax & PIRat
PImin & -PIRat
errω PWmax & PWrat
PWmin & -PWrat
1 2
4
5
7
6
3
8
91 - Pitch2 - Pitch Control3 - Torque Control4 - Pitch Compensation5 - Power Control6 - Speed Reference7 - Mech Speed8 - Mech Angle9 - Elect Speed10- ElectAngle11- Washout12- Active Power
States10
WindPowerModel
if (fbus < fb ORfbus > fc)
FrequencyResponse
Curve
Active PowerControl
(optional)
avlP
avfP
To gewtgTrip Signal
(glimit)
WTG TerBus Freq
AuxiliarySignal(psig)
fbusΣ+
+
setp0
1
fflg
apcflg minP
maxP
stlp
setAPCP
1
MAX
ReleaseP
if fflg set
WindSpeed
(glimv)
1
12
11 pavsT+
+
− 1W
W
sTsT+
Σ+
+
11
wshoΣ perr
plim
Spdwl
Simulator calculates initial windspeed Spdwl.
ordP
ΣdbrP +
+

Governor WNDTGE Wind Turbine and Turbine Control Model for GE Wind Turbines
1s
Two - Mass Rotor Model
1s
1s
1s
12H
12 gH
tgD
baseω
baseω
mechT
elecT
tgK
++
ΣΣ
Σ
Σ
Σ
Σ
0ω+
+rotorω
shaftT
++
−−
−
ωΔ
0ω+
+
7 8
9 10
−
Turbine Speed
ω Generator Speed
mechmech
mech 0
PTω ω
=+
mechω
elecω
elecelec
elec 0
PTω ω
=+
Wind Power Model( )3
mechP ,2 r w pAv Cρ λ θ=
( / )b wK vλ ω=
( )4 4
0 0
, i jp ij
i j
C λ θ α θ λ= =
=∑∑See charts for curve fit values
Model supported by PSLF

Governor WNDTRB
Governor WNDTRB Wind Turbine Control Model
1s
90
0
r
Rotor speedω
mechP1
2
(1 )1PK sT
sT+
++−
11 asT+
refω
Σ
woP
πMXBPR
MX-BPR
Model supported by PSLF
1 2 3cos
1 - Input2 - Blade Angle (Deg)3 - Blade Pitch Factor
States

Governor WPIDHY
Governor WPIDHY Woodward PID Hydro Governor Model
−+
+
PK
DsK
iKs
+
+ ( )21
1 AsT+Σ 1s
M AXVel
11 BsT+Σ
1 REG
REGsT+
+ Σ−
MAXG
MING
MAXP
MINP
1
12
W
W
sTTs
−
+PG
D
+
Σ
0( , 0)G
1 1( , )G P
2 2( , )G P
3(1, )P
Gate Position (pu)
0 1.0
Model supported by PSSE
REFP
ΔωSpeed
−
MECHP
ELECP Per U
nit O
utpu
t (M
BA
SE)
1
2
45
763
1 - Mechanical Output2 - Measured Delta P3 - PID14 - PID25 - PID36 - Velocity7 - Gate
States
MINVel

Governor WSHYDD
Governor WSHYDD WECC Double-Derivative Hydro Governor Model
G VN
Δω(Speed) err
1db
11 DsT+
1
1 F
sKsT+
( )
22
21 F
s KsT+
+
+
+ Σ IKs
refP
R
Σ+
−
−
11 TsT+( 0)TT >
elecP
1G
P
KsT+
OPENVEL
CLOSEVEL
1s
MAXP
MINP
2d b
GV 11
tu r b tu r b
tu r b tu r b
s A Ts B T
++
r a teTM V A
GVP mechP+
−
Σ
Model supported by PSSE
0TT =
2 3
7
8
6
1
mech
D elec
1
2
2
1 - P 6 - Integrator2 - T 7 - P Sensed3 - K 8 - Valve4 - K first 9 - Gate5 - K second
States
4 5
9
Inputs GV1, PGV1...GV5, PGV5 are the x,ycoordinates of blockGVN

Governor WSHYGP
Governor WSHYGP WECC GP Hydro Governor Plus Model
G VN
err
1db
11 DsT+
IKs
1D
f
sKsT+
+
+
+
R 11 tsT+( 0)tT >
1G
P
KsT+
1s 2d b
GV 11
tu r b tu r b
tu r b tu r b
s A Ts B T
++
r a teTM V A
GVP+
−
Σ
PK
Σ+
−
−
0tT =
CVΣ
Model supported by PSSE
176
5
3
4
2
mechP
elecP
Δω(Speed)
refP
OPENVEL
CLOSEVEL
MAXP
MINP
mech elec
D
1 - P 5 - P Sensed2 - T 6 - Valve3 - Integrator 7 - Gate4 - Derivative
States
GV1, PGV1...GV5, PGV5 are the x,y coordinates of blockGVN

Governor WSIEG1
Governor WSIEG1 WECC Modified IEEE Type 1 Speed-Governor Model
Δω err
1db
4
11 sT+
1K
5
11 sT+
3K
6
11 sT+
5K
7
11 sT+
7K
Σ Σ
2K 4K 6K 8K
Σ Σ
Σ
Σ
HPPMECH
LPPMECH
+
+
+
+
+
+
++
++
++
M1P
M2P
G VN
OU
CU
1s
MAXP
MINP
2d b
GV GVP−
−3
1T
K 2
1
11
sTsT
++
CV Σ
0GV
+
Model supported by PSSEGV1, PGV1...GV5, PGV5 are the x,y coordinates of blockGVN
1
653 4
2
1 - Lead-lag2 - Governor Output3 - Turbine 14 - Turbine 25 - Turbine 36 - Turbine 4
States
MIN MIN
MAX MAX
MIN MIN
MAX MAX
Iblock 1 : if P =0, P =PinitialIblock 2 : if P =0, P =PinitialIblock 3 : if P =0, P =Pinitial
: if P =0, P =Pinitial
===

Governor WT1T
Governor WT1T Wind Turbine Model for Type-1 Wind Turbines
Model supported by PSLF
+ 12H
1sΣ
−
÷
shaftD
−
12 tH
1s
12 gH
1s
1s
K
÷
÷
Σ
Σ
Σ
Σ
Σt tfrac
g t2
t g
H =H×HH =H-H
2H ×H ×(2π×Freq1)K =
H
tω
gω
mechP
genP
Type 1 WTG Turbine Two - mass Model
Type 1 WTG Turbine One - mass Model
mechT
elecT
FromGovernor
M odel
FromGenerator
M odel
tω
gω
0ω
0ω
tωΔ
gωΔ
tgωΔtgωΔ
−
−
−
+
+
+
+
−
accT
FromGenerator
M odel
FromGovernor
M odel
mechP
genP
ToGenerator M odel andGovernor
M odel
ω
1
2
3 4
1 - TurbineSpeed2 - ShaftAngle3 - GenSpeed4 - GenDeltaAngle
States
1
Damp
1s

Governor WT3T
Governor WT3T Wind Turbine Model for Type-3 (Doubly-fed) Wind Turbines
t tfrac
g t2
t g
H =H×HH =H-H
2H ×H ×(2π×Freq1)K =
H
Type 3 WTG Turbine Two - mass Model
1 - TurbineSpeed2 - ShaftAngle3 - GenSpeed4 - GenDeltaAngle
States
+ 12H
1sΣ
−
÷−
Type 3 WTG Turbine One - mass Model
accT
FromGenerator
M odel
FromPitch Control
M odel
mechPgenP
To Pitch Control M odel and Converter Control M odel
ω1+Σ−+
−
SimplifiedAerodynamic M odel
π
moP
aeroKΣ+
Blade Pitchθ
0θ
Model supported by PSLF
2
2 1When windspeed > rated windspeed, blade pitch initialized to 10.75 W
ThetaV
θ⎛ ⎞
= −⎜ ⎟⎝ ⎠
Damp
shaftD
12 tH
1s
12 gH
1s
1s
K
÷
÷
Σ
Σ
Σ
Σ
Σ
tω
gω
mechP
genP
mechT
elecT
tω
gω
0ω
0ω
tωΔ
gωΔ
tgωΔtgωΔ
−
−
−
+
+
+
+
−
1
2
3 41s

Governor WT3T1
Governor WT3T1 Mechanical System Model for Type 3 Wind Generator
Model supported by PSSE
+−Σ
Σ
Σ
Σ
Σ
+
+
+
+ +
−
−
+ +
−
+
−
shaftD
12 tH s
12 gH s
1s
baseω
Σ shaftKs
elecT
mechT
t tfrac
g t2
t gshaft
0
H =H×HH =H-H
2H ×H ×(2π×Freq1)K =
H×ω
3
2
1
4
Damp
+ Σ−+−
InitialPitchAngle
π aeroP initialaeroKΣ
+Blade Pitchθ
0θ1
1 State 1+
baseω
baseω
From W T3P1 M odel
−
0ω
Rotor Angle
Deviation
Initial rotor slip
mechTΣ
tωΔ
gωΔ
tgωΔ
gω

Governor BBGOV1
European Governor Model BBGOV1
−
−
OP
+
+
11P
NK
sT⎛ ⎞⎜ ⎟+⎝ ⎠
−
+Speed
ωΔ
PELEC
cutf
cutf
SK
LSK
LSK−
G
LS
KK
1s
Σ
1
11 sT+
Σ 1D
D
sKsT+
MAXP
MINP
0SWITCH =
0SWITCH ≠
4
11 sT+ 21 K−
31 K−
2
51K
sT+
3
61K
sT+
+
+ +Σ PM ECH
2 3 4 5 61

Governor IVOGO
IVO Governor Model IVOGO
MECHP( )5 5 5
6 6
K A sTA sT
++
( )3 3 3
4 4
K A sTA sT
++
3MAX
3MIN
( )1 1 1
2 2
K A sTA sT
++
1MAX
1MIN
5MAX
5MIN
SPEEDΣ
REF
+
−
2 3 4 5 61

Governor TURCZT
Czech Hydro and Steam Governor Model TURCZT
+
PK
1
IsT
TMAXN
+
Power Regulator
TMINN
+
−
BSFREQ
REFdF
Σ
SBASEMBASE
PELEC
MAXf
MINfDEADf
Frequency Bias
KORK
11 CsT+ MK
−
−+
TREFN
Measuring Transducer
Σ 11 EHPsT+Σ
−
+
Hydro Converter
DEADs
Frequency Bias
STATK
ΣREGY
Governor
+
−
REGY
Regulation Valves
HPK
Turbine
1
UT1s
MAXG
MING
MAXV
MINV
Σ1SWITCH =
0SWITCH =
11 HPsT+
11 RsT+
1 HPK−
1
MKΣ+
+
HP Part
Reheater
Steam Unit
PM ECH
311 2Hs T+
2 1
MK+
− ΣPM ECH
Hydro Unit
2 3 4 5 61

Governor URCSCT
Combined Cycle on Single Shaft Model URCSCT
( , )STOUT A POUT A
Steam Turbine Output (MW)
( )
PlantOutputMW
( , )STOUT B POUT B
( , )STOUT C POUT C(Steam Turbine Rating, Steam & Gas Turbine Rating)
2 3 4 5 61

Governor HYGOVM
Hydro Turbine-Governor Lumped Parameter Model HYGOVM
( )TAILHV
( )LAKEHV
BSCHH
( )SCHH
V
SCHQ
TUNQ
PENQ
TUNNELTUNL / A, TUNLOS
SCHARE
SURGECHAMBER
PENSTOCKPENL / A, PENLOS
TURBINE
Hydro Turbine Governor Lumped Parameter Model
SCHLOS

Governor HYGOVM
Hydro Turbine-Governor Lumped Parameter Model HYGOVM
INPUT OUTPUT
Gate +Relief Valve
π 2O ÷
PENLOS2
2PEN tQ AO gv
sPENL A
π
tA
Σ
2PENQ
+
+ − +
gvsTUNL A
TUNLOS
Σ ΣBSCHH
TAILH
−
Σ −+LAKEH
BSCHH
gvsTUNL A
ΣSCHH
+
+
SCHLOS
−
+
π2SCHQ
SCHQ
Σ TUNQ+
−
PENQ
π
2TUNQ
PENQ
gv Gravitational accelerationTUNL/A Summation of length/cross section of tunnel SCHARE Surge chamber cross section PENLOS Penstock head loss coeficient FSCH
LEGEND :
Surge chamber orifice head loss coeficientPENL/A Summation of length/cross section of penstock, scroll case and draft tube
tA Turbine flow gainO Gate + relief valve opening HSCH Water level in surge chamber QPEN Penstock flow QTUN Tunnel flowQSCH Surge chamber flow
Hydro Turbine Governor Lumped Parameter Model
2 3 4 5 61

Governor HYGOVM
Hydro Turbine-Governor Lumped Parameter Model HYGOVM
SpeedReference
11 fsT+
+
−
+−
−
Speed
+
R
1s
RVLMAX
0
1 r
r
sTrsT+
MAXG
MING
0.01
+
+ Σ
1
gT1s
MXJDOR
MXJDCR
Σ−
DeflectorPosition
1
gT1s
MXGTOR orMXBGOR
MXGTCR orMXBGCR
GateOpening
Σ
Σ−
+
Σ
RVLVCR
Governor Gate Servo
Relief ValveOpening
Jet Deflector
Relief Valve
r
f
R Permanent droopr Temporary droopT Governor time constant T Filter time constantT Servo time constant MXG
g
LEGEND :
TOR Maximum gate opening rateMXGTCR Maximum gate closing rateMXBGOR Maximum buffered gate opening rate
MXBGCR Maximum buffered gate closing openingGMAX Maximum gate limitGMIN Minimum gate limit RVLVCR Relief valve closing rateRVLMAX Maximum relief valve limit MXJDOR Maximum jet deflector opening rateMXJDCR Maximum jet deflector closing rate
2 3 4 5 61

Governor HYGOVT
Hydro Turbine-Governor Traveling Wave Model HYGOVT
( )TAILHV
( )LAKEHV
BSCHH
( )SCHH
V
SCHQ
TUNQ
PENQ
TUNNEL
SCHARE
SURGECHAMBER
PENSTOCK
TURBINE
SCHLOS
( , , , )TUNNEL
TUNLGTH TUNSPD TUNARE TUNLOS
Time
Tunnel InletConstraint
TUN
BSCH
VAR(L + 45 + ICON(M + 2)) = QVAR(L + 65 + ICON(M + 2)) = H
Space
Surge ChamberConstraints
/ ( ( 2) 1)TUNLGTH ICON M + +144424443)
)VAR(L + 46VAR(L + 66
FlowsHeads
* ( 3)DELT ICON M⎧⎪+ ⎨⎪⎩
Hydro Turbine Governor Traveling Wave Model

Governor HYGOVT
Hydro Turbine-Governor Traveling Wave Model HYGOVT
+ +1
sSCHARE SCHH
SCHLOS
+
2SCHQ
SCHQTUNQ
PENQ
Surge Chamber
BSCHHΣ
π
Σ
( , , , )PENSTOCK
PENLGTH PENSPD PENARE PENLOS
Time
TurbineConstraint
VAR(L + 55 + ICON(M))VAR(L + 25 + ICON(M))
Space
Surge ChamberConstraints
/ ( ( ) 1)PENLGTH ICON M +144424443
))
PEN
BSCH
VAR(L + 6 QVAR(L + 26 H
==
FlowsHeads
* ( 1)DELT ICON M⎧⎪+ ⎨⎪⎩
Hydro Turbine Governor Traveling Wave Model

Governor HYGOVT
Hydro Turbine-Governor Traveling Wave Model HYGOVT
SpeedReference
11 fsT+
+
−
+−
−
Speed
+
R
1s
RVLMAX
0
1 r
r
sTrsT+
MAXG
MING
0.01
+
+ Σ
1
gT1s
MXJDOR
MXJDCR
Σ−
DeflectorPosition
1
gT1s
MXGTOR orMXBGOR
MXGTCR orMXBGCR
GateOpening
Σ
Σ−
+
Σ
RVLVCR
Governor Gate Servo
Relief ValveOpening
Jet Deflector
Relief Valve
r
f
R Permanent droopr Temporary droopT Governor time constant T Filter time constantT Servo time constant MXG
g
LEGEND :
TOR Maximum gate opening rateMXGTCR Maximum gate closing rateMXBGOR Maximum buffered gate opening rate
MXBGCR Maximum buffered gate closing openingGMAX Maximum gate limitGMIN Minimum gate limit RVLVCR Relief valve closing rateRVLMAX Maximum relief valve limit MXJDOR Maximum jet deflector opening rateMXJDCR Maximum jet deflector closing rate
Hydro Turbine Governor Traveling Wave Model
2 3 4 5 61

Governor TGOV4
Modified IEEE Type 1 Speed-Governor Model with PLU and EVA Model TGOV4
Generator Power1
REVA
REVA
sTsT+
EVA RateLevel>
EVAUnbalance
Level
>
AN D
Y
Y−
1RPLU
RPLU
sTsT+
Σ
Reheat Pressure
+
Generator CurrentPLU Rate
Level> Timer
AN D LATCH
1IVT
2IVT
#1IV
# 2IVOR
1CVT
2CVT
3CVT
4CVT
#1CV
# 2CV
# 3CV
# 4CVPLU
UnbalanceLevel
> YΣ+
−
Y
N
PLU and EVA Logic Diagram2 3 4 5 61

Governor TWDM1T
Tail Water Depression Hydro Governor Model TWDM 1T
Speed
11 fsT+
1 rsT+
−
+REFN
R
1s
1
rrT1
1 gsT+
GATE MAX
GATE MIN
VELM OPEN
VELM CLOSE
Σ
+
+Σ
e c
1
WsT tA 1.0π π÷ Σ+
−
−
+
−
+Σ Σh q
1 qNL turbD
Speed
PMECH
0.
g
Tail Water Depression Model 1
2s f sFΔ <
2f FΔ <
1f FΔ <
Measured Frequency
FREQΔ 11 ftsT+ 2FT LATCH
1FT LATCH
AN DOR
Trip TailWater
Depression
Tail Water Depression Trip Model
fΔ
2 3 4 5 61

Governor TWDM2T
Tail Water Depression Hydro Governor Model TWDM 2T
+
−SPEEDωΔ
1s
11 BsT+
ATMXG
ATMNG
ELMXV
ELMNV
+
1
WsT tA 1.0π π÷ Σ+
−
−
+
−
+Σ Σh q
1 qNL
turbD
PMECH
0.
Tail Water Depression Model 2
2s f sFΔ <
2f FΔ <
1f FΔ <
Measured Frequency
FREQΔ 11 ftsT+ 2FT LATCH
1FT LATCH
AN DOR
Trip TailWater
Depression
Tail Water Depression Trip Model
fΔ
( )21
1 AsT+LOGIC
1s
TWD Lock MAX
TWD Lock MIN TwoTrip
PK
DsK
Σ+
++
1 REG
RegsT+
ELECTP
−
REFP
Σ
Σ
2 3 4 5 61

2 CR
HVDC Two Terminal DC Control Diagram
1
2 3
(1 )(1 )(1 )
K sTsT sTα− +
+ +
ΣD E SP M O DPR E C T+ +
DESDES
MEAS
PIV
=11 vsT+
DCV MEASVDESIC O N S T A N T
P O W E RC O N S T A N TC U R R E N T
MEASVMINV
MAXI
MINI
If If , If ,
MIN DES MAX
ORD DES
MIN DES ORD DES
MAX DES ORD MAX
I I II II I I II I I I
≤ ≤=> =< =
11 CsT+
DCIMAXI
+
−
− +
MARGINSWITCHLOGIC 10%*
*MIN MAX
MIN LIM RATED
I IV V V
==
ORDI−LIM
0
Σ'Vα +
+
Σcoscos
R
I
αα
11 DsT+
1.35 CE
Vαcos cos
cos cos
R oOR
IOR
VEVE
α
α
α γ
α γ
= −
= −
OR OIE E
( )MEASI
RECTIFIER ( )MEASI
INVERTER
( )MODI
RECTIFIER
( )
CURRENTMARGIN
INVERTER
V O L T A G ET R A N S D U C E R
C U R R E N TT R A N S D U C E R
0 min(cos cos ) 2 ( )(cos cos ) 2 ( )
OR MEAS C
OI STOP MEAS C
LIM E I R RECTLIM E I R IVERT
γ γγ γ
= + −= + −
MEASI
Model in the public domain, available from BPA

HVDC WSCC Stability Program Two-Terminal DC Line Model
A rV A iV
'rD '
iDrV iV p iV
crX crR srL R L siL ciRviV ciX
1 2
3
vrV
p rV
rP iP
I
r rP G E N jQ G E N+
1 : rNi iP G E N jQ G E N−
: 1iN
' '
'
3 2 3 2 co s co s2
3co s P G E N
co s
crr r A R p r r r
p r
r r cr r r
rr
r
IXE N V VV
ID E X D I
DE
γ θπ π
απ
θ
= = = −
= − =
=
' '
'
3 2 3 2 co s co s2
3co s P G E N
co s
c ii i A i p i i i
p i
i i c i i i
ii
i
IXE N V VV
ID E X D I
DE
β θπ π
απ
θ
= = = −
= − =
=
''
'''
( c o s c o s ) /
( c o s c o s ) /3W H E R E ( )
r M I N i M I N v r v i T O T
r M I N i S T O P v r v i T O T
T O T c r c i c r c i
I E E V V R
I E E V V R
R R R R X X
α γ
α γ
π
= − − −
= + − −
= + + + −
Model in the public domain, available from BPA

6 CXπ
HVDC-MTDC Control System for Rectifiers and Inverters without Current Margin
1
2 3
(1 )(1 )(1 )
K sTsT sTα− +
+ +
DESDES
MEAS
PIV
=11 vsT+
DCV LAGVDESIC O N S T A N T
P O W E RC O N S T A N TC U R R E N T
VDV
MAXI
MINI
If If , If ,
MIN D MAX
ORD D
D MAX ORD MAX
D MIN ORD MIN
I I II II I I II I I I
≤ ≤=
> =< =
11 CsT+
DCI
−
ORDILIM
0.0
3V
11 LIMsT+
doV
cos cos ONdoL
VV
αα γ= −
MEASI
REFI
0 min
0
(cos cos ) (cos cos )
doL
doL STOP
RECT LIM VINV LIM V
γ γγ γ
= += +
MEASI
Model in the public domain, available from BPA
+
Σ
1V Vα GREATEROF THE
TWO
CV
doLV
+1.
1.−
cosα
'MAXI
−

6 CXπ
HVDC-MTDC Control System for Terminals with Current Margin
1
2 3
(1 )(1 )(1 )
K sTsT sTα− +
+ +
+
ORDI
LIM
0.0
3V
11 LIMsT+
doV
cos cos ONdoL
VV
αα γ= −
MEASI
MARGI
(cos cos )doL ON STOPLIM V γ γ= +
MEASI
Model in the public domain, available from BPA
+
1V Vα GREATEST
OF THETWO
CV
doLV
+1.
1.−
cosα
−
DCI 11 CsT+
1ORDI2ORDI
3ORDI
-1ORD NI
... Σ
Σ
2 ( )cos cosC MARGON o
do INITIAL
R FRAC IV
γ γ= +
(cos cos ) 2CORD do ON o C ORDV V R Iγ γ= − +
CORDV
0.25FRAC =

HVDC Detailed VDCL and Mode Change Card Multi-Terminal
DES
MEAS
PV
Model in the public domain, available from BPA
DES
MEAS
PV
1MEAS CV V>
ORDI
MEASV NO
YES
DESI
VDCL
1
Mode Change PU rated DC Voltage below
which mode is changed to constant from constant
CV
I P
1.0
1Y
0Y
1V 2V
CURRENT
VOLTAGE
1 0
1 2
VDCL, PU Current on rated Current base, V PU Voltage on rated Voltage base
Y YV

HVDC Equivalent Circuit of a Two Terminal DC Line
d rV d iV ciE
rX crR LR ciR iX
crE
dI, r rP Q
1 : T
Model in the public domain, available from BPA
+
−
+
−
rR eq rR eq iR iR
, i iP Q
rE α iE αco sd o r rV α co sd o i iV α−
1 : T
D rV D iV

2 CR
HVDC BPA Converter Controller
1
2 3
(1 )(1 )(1 )
K sTsT sTα− +
+ +
ΣD E SP M O DPR E C T+ +
DESDES
MEAS
PIV
=11 vsT+
DCV MEASVDESIC O N S T A N T
P O W E RC O N S T A N TC U R R E N T
MEASVMINV
MAXI
MINI
If If , If ,
MIN DES MAX
ORD DES
MIN DES ORD DES
MAX DES ORD MAX
I I II II I I II I I I
≤ ≤=> =< =
11 CsT+
DCIMAXI
+
−
− +
MARGINSWITCHLOGIC 10%*
*MIN MAX
MIN LIM RATED
I IV V V
==
ORDI−LIM
0
Σ'Vα +
+
Σcoscos
R
I
αα
11 DsT+
1.35 CE
Vαcos cos
cos cos
R oOR
IOR
VEVE
α
α
α γ
α γ
= −
= −
OR OIE E
( )MEASI
RECTIFIER ( )MEASI
INVERTER
( )MODI
RECTIFIER
( )
CURRENTMARGIN
INVERTER
V O L T A G ET R A N S D U C E R
C U R R E N TT R A N S D U C E R
0 min(cos cos ) 2 ( )(cos cos ) 2 ( )
OR MEAS C
OI STOP MEAS C
LIM E I R RECTLIM E I R IVERT
γ γγ γ
= + −= + −
MEASI
Model in the public domain, available from BPA
C U R R E N TC O N T R O L L E R
DESI

HVDC BPA Block Diagram of Simplified Model
11T DC
L
i IsT+
ΣD E SP( )
M O DPR+ +
DESDES
MEAS
PIV
=11 vsT+
drV MEASVdesIC O N S T A N T
P O W E RC O N S T A N TC U R R E N T
MEASVMINV
MAXI
MINI
If If , If ,
MIN des MAX
ord des
MIN des ord MIN
MAX des ord MAX
I I II II I I II I I I
< <=≥ =≤ =
11 CsT+
dIMAXI
+
+
MARGINSWITCHLOGIC
ORDI
ord rIΣMODI
d MEASI
Model in the public domain, available from BPA
C o n tro l S ch em eL o g ic
desI
+DI
DI +
+
IΔΣ
ord iI
0 0cos cos 2dor doi i
T
V V VR
α γ− −dorV
doiV
ordI
−( )cu rren t m a rg in
. IN V C o n tro lle r
DCI
ord iI
ord rI
dIcoscos
r
i
αα
C o n tro l S ch em e L o g ic
If: ; cos cos 2
T ordr d ordr
i o dor r doi o D T D
T ordi
i I CC CEAControl I IV V V R I
i I CIA CC Controlγ γ α γ
≥ → − → == = + +
≥ → − ; cos cos 2
d ordi
r o doi i do o D T D
ordi T ordr d T
I IV V V R I
I i I CIA CEAControl I iγ γ γ α
→ == = − −
< < → − → = ; r o i oα α γ γ= =

HVDC BPA Block Diagram of Simplified Model
Model in the public domain, available from BPA
1 d
ssT+
11 fsT+
ss ε+
2
2
s sA Bs sC D+ ++ +
K
MINI
MAXIMODI
AC
AC
IP
Low Level Modulation
1 d
ssT+
11 fsT+
ss ε+
2
2
s sA Bs sC D+ ++ +
K*
MINP
*MAXP
MODPAC
AC
IP
High Level Modulation
11 d
ssT+ 1
11 fsT+ 1
ss ε+
21 1
21 1
s sA Bs sC D+ ++ +
1K1
RECTω
21 d
ssT+ 2
11 fsT+ 2
ss ε+
22 2
22 2
s sA Bs sC D+ ++ +
2K2
INVω
MINP
MAXP+
−
MODPΣ
Dual Frequancy Modulation
*MAX MAX DESIREDP P P= − *
MIN MIN DESIREDP P P= −

HVDC BPA Block Diagram of Simplified Model
Model in the public domain, available from BPA
11ssT+
3
41A sT
sT++
5
61B sT
sT++
Kγ
MINγ
MAXγγ
ACV
Gamma Modulation
1 3 4 5
MAX
, , , are in secs. is in degrees/pu volts, are in degrees , must be 1 or zero
HILO must be 5MIN
T T T T KA B
γγ γ
REFV
+
−Σ +
+
Σ
0γ

Load Characteristic CIM5
Load Characteristic CIM5 Induction Motor Load Model
Model supported by PSSE
A AR jX+
mjX1jX
1Rs
2jX
2Rs
Type 1
A AR jX+
mjX 1Rs
2jX
2Rs
Type 2
Impedances on Motor MVA Base
1jX
2 2
DL
Model Notes: 1. To model single cage motor: set R = X = 0.
2. When MBASE = 0.; motor MVA base = PMULT*MW load. When MBASE > 0.; motor MVA base =MBASE 3. Load Torque, T = T(1+D ) 4. For mot
ω
nom 0
|
or starting, T=T is specified by the user in CON(J+18). For motor online studies, T=T is calculated in the code during initialization and stored in VAR(L+4). 5. V is the per unit vo
|
|
ltage level below which the relay to trip the motor will begin timing. To display relay, set
V=0
6. T is the time in cycles for which the voltage must remain below the threshold for t Bhe relay to trip. T is the
breaker delay time cycles.

Load Characteristic CIM6
Load Characteristic CIM6 Induction Motor Load Model
Model supported by PSSE
A AR jX+
mjX1jX
1Rs
2jX
2Rs
Type 1
A AR jX+
mjX 1Rs
2jX
2Rs
Type 2
Impedances on Motor MVA Base
( )
2 2
D2L 0
Model Notes: 1. To model single cage motor: set R = X = 0.
2. When MBASE = 0.; motor MVA base = PMULT*MW load. When MBASE > 0.; motor MVA base =MBASE
3. Load Torque, T = T A +B +C +D
4.
E
ω ω ω
nom 0
|
For motor starting, T=T is specified by the user in CON(J+22). For motor online studies, T=T is calculated in the code during initialization and stored in VAR(L+4). 5. V is the per
|
|
unit voltage level below which the relay to trip the motor will begin timing. To display relay, set
V=0
6. T is the time in cycles for which the voltage must remain below the threshol Bd for the relay to trip. T is the breaker delay time cycles.
1jX

Load Characteristic CIMW
Load Characteristic CIMW Induction Motor Load Model
Model supported by PSSE
A AR jX+
mjX1jX
1Rs
2jX
2Rs
Type 1
A AR jX+
mjX 1Rs
2jX
2Rs
Type 2
Impedances on Motor MVA Base
( )
2 2
D2L 0
Model Notes: 1. To model single cage motor: set R = X = 0.
2. When MBASE = 0.; motor MVA base = PMULT*MW load. When MBASE > 0.; motor MVA base =MBASE
3. Load Torque, T = T A +B +C +D where C0E
ω ω ω 0 0
2
0
|
=1 A B D .
4. This model cannot be used formotor starting studies. T is calculated in the code during initialization and stored in VAR(L+4). 5. V is the per unit voltage
Eω ω ω− − −
|
|
level below which the relay to trip the motor will begin timing. To display relay, set
V=0
6. T is the time in cycles for which the voltage must remain below the threshold for the rel Bay to trip. T is the breaker delay time cycles.
1jX

Load Characteristic CLOD
Load Characteristic CLOD Complex Load Model
Model supported by PSSE
P jQ+
Tap
O
R jXP+
Load MW input on system baseOP =
I
V
I
V
ConstantMVA 2
*
*
PKRO
RO
P P V
Q Q V
=
=
LargeMotors
SmallMotors
DischargeMotors
TransformerSaturation
RemainingLoads
M M

Load Characteristic EXTL
Load Characteristic EXTL Complex Load Model
PKs
PMLTMX
PMLTMN
1
initialP−
+
Σπ
initialP
MULTPactualPQK
s
QMLTMX
QMLTMN
1
initialQ−
+
Σπ
initialQ
MULTQactualQ

Load Characteristic IEEL
Load Characteristic IEEL Complex Load Model
Model supported by PSSE
( )( )
( )( )
31 2
5 64
1 2 3 7
4 5 6 8
1
1
nn nload
n nnload
P P av a v a v a f
Q Q a v a v a v a f
= + + + Δ
= + + + Δ

Load Characteristic LDFR
Load Characteristic LDFR Complex Load Model
Model supported by PSSE
m
OO
n
OO
r
p poO
s
q qoO
P P
Q Q
I I
I I
ωω
ωω
ωω
ωω
⎛ ⎞= ⎜ ⎟
⎝ ⎠
⎛ ⎞= ⎜ ⎟
⎝ ⎠
⎛ ⎞= ⎜ ⎟
⎝ ⎠
⎛ ⎞= ⎜ ⎟
⎝ ⎠

Load Characteristic BPA INDUCTION MOTOR I
Load Characteristic BPA Induction MotorI Induction Motor Load Model
S SR jX+
mjX
RjX
RRRs
= , MWST E
MECHANICALLOAD
2
2
Model Notes: Mechanical Load Torque, ( ) where C is calculated by the program such that 1.0 1
OT A B C T
A B C
ω ω
ω ωω ω
= + +
+ + == −
Model in the public domain, available from BPA

Load Characteristic BPA TYPE LA
Load Characteristic BPA Type LA Load Model
( )( )20 1 2 3 4 1 * DPP P PV PV P P f L= + + + +Δ
Model in the public domain, available from BPA

Load Characteristic BPA TYPE LB
Load Characteristic BPA Type LB Load Model
( )( )20 1 2 3 1 * DPP P PV PV P f L= + + +Δ
Model in the public domain, available from BPA

Stabilizer BPA SF, BPA SP, BPA SS, and BPA SG
Stabilizer BPA SF, BPA SP, BPA SS, and BPA SG Stabilizer Models
−
+
QV
QV
K1+sT
QS
QS
K1+sT
Q
Q
sT1+sT
'Q2
Q2
1+sT1+sT
'Q1
Q1
1+sT1+sT
T TO TV =V V−
SHAFT SLIP, FREQ. OR
ACCEL. POWERΔ
'Q3
Q3
1+sT1+sT
'CUTOFF S S
CUTOFF'
S S T CUTOFF
S T CUTOFF
T TO T
If V 0.0, then V =VIf V >0.0, then
V =V if V V
V =0.0 if V >V V =V V
≤
Δ ≤
Δ
Δ −
STV
Model in the public domain, available from BPA
SMAXV
SMINV
ΣQSKtse+
⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩
ZERO
'SV
TVΔ
CHOICE OFINPUT SIGNALS
QS
QV
Q
Q1
Q2
Q3
1 - K2 - K3 - T4 - T5 - T6 - T
States
1
2
3 4 5 6

Stabilizer BPA SH, BPA SHPLUS, and BPA SI
Stabilizer BPA SH, BPA SHPLUS, and BPA SI Stabilizer Models
No block diagrams have been created

Stabilizer IEE2ST
Stabilizer IEE2ST IEEE Stabilizing Model with Dual-Input Signals
+
+Σ
1
1
K1+sT
2
2
K1+sT
3
4
sT1+sT
7
8
1+sT1+sT
9
10
1+sT1+sT
SMINL
SMAXLS SS CU CT CL
S CT CL
S CT CU
V = V if (V > V > V )V = 0 if (V < V )V = 0 if (V > V )
5
6
1+sT1+sT
SSV
Output Limiter
Input Signal #1
Input Signal #2
STV
Model supported by PSSE
1
2
3 4 5
6
1 - Transducer12 - Transducer23 - Washout4 - LL15 - LL26 - Unlimited Signal
States

Stabilizer IEEEST
Stabilizer IEEEST IEEE Stabilizing Model
3
4
1+sT1+sT
5S
6
sTK1+sT
SMINL
SMAXLS SS CU CT CL
S CT CL
S CT CU
V = V if (V > V > V )V = 0 if (V < V )V = 0 if (V > V )
1
2
1+sT1+sT
SSV
Output Limiter
Input Signal2
5 62 2
1 2 3 4
1+A s+A s(1+A s+A s )(1+A s+A s )
Filter
Model supported by PSLF with time delay that is not implemented in SimulatorModel supported by PSSE
STV
1 2 3 4 5 6
1 - Filter 12 - Filter 23 - Filter 34 - Filter Out5 - LL16 - LL27 - Unlimited Signal
States
7

Stabilizer PFQRG
Stabilizer PFQRG Power-Sensitive Stabilizing Unit
-MAX
MAX+
+Σ I
PKKs
+
Model supported by PSLF
STV
ReactivePower
PowerFactor
J=1
J=0
Reference Signal,Reactive power or Power Factor
To VoltageRegulator
SupplementarySignal
1
1 - PIStates

Stabilizer PSS2A
Stabilizer PSS2A IEEE Dual-Input Stabilizer Model
+
+
Σ
STMINV
STMAXV
Input Signal #2
W1
W1
sT1+sT 6
11+sT
W2
W2
sT1+sT
W3
W3
sT1+sT
S2
7
K1+sT
W4
W4
sT1+sT
S3K
N
8M
9
1+sT(1+sT )⎡ ⎤⎢ ⎥⎣ ⎦
+
−S1K 1
2
1+sT1+sT
3
4
1+sT1+sT
STV
A B S4
Model supported by PSLFModel supported by PSSE without T ,T lead/lag block and with K 1=
A+sT1+sT
A
B
S4K
Σ
7 81 2 3
4 5 6
Input Signal #1
1 - WOTW1 11 - RampFilter32 - WOTW2 12 - RampFilter43 - Transducer1 13 - RampFilter54 - WOTW3 14 - RampFilter65 - WOTW4 15 - RampFilter76 - Transducer2 16 - RampFilter87 - LL1 17 - RampFilter98 - LL2 18
States
- RampFilter109 - RampFilter1 19 - LLGEOnly10 - RampFilter2
19
9 18−

Stabilizer PSS2B
Stabilizer PSS2B IEEE Dual-Input Stabilizer Model
+
+
Σ
STMINV
STMAXV
W1
W1
sT1+sT 6
11+sT
W2
W2
sT1+sT
W3
W3
sT1+sT
S2
7
K1+sT
W4
W4
sT1+sT
S3K
N
8M
9
1+sT(1+sT )⎡ ⎤⎢ ⎥⎣ ⎦
+
−
S1K 1
2
1+sT1+sT
3
4
1+sT1+sT
STV
10
11
1+sT1+sTΣS1V
S2V
S1MAXV
S1MINV
S2MAXV
S2MINV
7 81 2 3
4 5 6
20
19
A B S4
Model supported by PSLFModel supported by PSSE without T ,T lead/lag block and with K 1=
A+sT1+sT
A
B
S4K
1 - WOTW1 11 - RampFilter32 - WOTW2 12 - RampFilter43 - Transducer1 13 - RampFilter54 - WOTW3 14 - RampFilter65 - WOTW4 15 - RampFilter76 - Transducer2 16 - RampFilter87 - LL1 17 - RampFilter98 - LL2 18
States
- RampFilter109 - RampFilter1 19 - LLGEOnly10 - RampFilter2 20 - LL3
9 18−

Stabilizer PSSSB
Stabilizer PSSSB IEEE PSS2A Dual-Input Stabilizer Plus Voltage Boost Signal
Transient Stabilizer and Vcutoff
+
+
Σ
STMINV
STMAXV
Input 1
Input 2
W1
W1
sT1+sT 6
11+sT
W2
W2
sT1+sT
W3
W3
sT1+sT
S2
7
K1+sT
W4
W4
sT1+sT
S3K
N
8M
9
1+sT(1+sT )⎡ ⎤⎢ ⎥⎣ ⎦
+
−S1K 1
2
1+sT1+sT
3
4
1+sT1+sT
STV
Model supported by PSLF
S4K
Σ
7 81 2 3
4 5 6
19
KV
TΔV >Vcutoff
Sw1
01
0 d1
11+sT
d2
d2
sT1+sT
ΣVcutoff
tlV
0
0≤+
+
T T0 TΔV =V -V
20
9 18−
1 - WOTW1 11 - RampFilter32 - WOTW2 12 - RampFilter43 - Transducer1 13 - RampFilter54 - WOTW3 14 - RampFilter65 - WOTW4 15 - RampFilter76 - Transducer2 16 - RampFilter87 - LL1 17 - RampFilter98 - LL2 18
States
- RampFilter109 - RampFilter1 19 - TransducerTEB10 - RampFilter2 20 - WOTEB

Stabilizer PTIST1
Stabilizer PTIST1 PTI Microprocessor-Based Stabilizer
Δω 1 3
2 4
K(1+sT )(1+sT )(1+sT )(1 sT )+
+− Σ π
F
Ms1+sT
+
+Σ
+
−Σ
P
11+sT
MP' TapSelection
Table
tE
eP on machine MVA base
1
Model supported by PSSE but not yet implemented in Simulator
STV

Stabilizer PTIST3
Stabilizer PTIST3 PTI Microprocessor-Based Stabilizer
Δω 1 3
2 4
K(1+sT )(1+sT )(1+sT )(1 sT )+
+− Σ π
F
Ms1+sT
+
+
Σ+
−
Σ
P
11+sT
MP'
TapSelection
Table
tE
eP on machine MVA base
1
5
6
1+sT1+sT
AveragingFunction
2 20 1 2 3 4 5
2 20 1 2 3 4 5
(A +A s+A s )(A +A s+A s )(B +B s+B s )(B +B s+B s )
LimitFunction
DL−
DL
AL−
AL
Switch 0=
Switch 1=
Model supported by PSSE but not yet implemented in Simulator
STV

Stabilizer ST2CUT
Stabilizer ST2CUT Stabilizing Model with Dual-Input Signals
+
+Σ
1
1
K1+sT
2
2
K1+sT
3
4
sT1+sT
7
8
1+sT1+sT
SMAXLS SS CU TO T CL TO
S T TO CL
S CT TO CU
V = V if (V +V >V >V +V )V = 0 if (V < V +V )V = 0 if (V > V +V )
5
6
1+sT1+sT
SSV
Output Limiter
Input Signal #1
Input Signal #2
9
10
1+sT1+sT
SMINL
TO
T
V = initial terminal voltageV = terminal voltage
Model supported by PSSE
STV
1
2
3 4 5 6
1 - Transducer12 - Transducer23 - Washout4 - LL15 - LL26 - Unlimited Signal
States

Stabilizer STAB1
Stabilizer STAB1 Speed-Sensitive Stabilizing Model
Ks1+sT
1
3
1+sT1+sT
2
4
1+sT1+sTSpeed (pu)
LIM-H
LIMH
Model supported by PSSE
STV1 2 3
1 - Washout2 - Lead-lag 13 - Lead-lag 2
States

Stabilizer STAB2A
Stabilizer STAB2A Power-Sensitive Stabilizing Unit
3
2 2
2
K sT1+sT⎡ ⎤
− ⎢ ⎥⎣ ⎦
3
3
K1+sT
eP on machine MVA base
LIM-H
LIMH+
+Σ
4K
2
5
5
K1+sT⎡ ⎤⎢ ⎥⎣ ⎦
Model supported by PSSE
STV
4
1 3− 5 6−
3
1 - Input State 12 - Input State 23 - Input State 34 - T5 - Output State 16 - Output State 2
States

Stabilizer STAB3
Stabilizer STAB3 Power-Sensitive Stabilizing Unit
eP on machine MVA base
LIM-V
LIMV−
+ Σ X1
11+sT
X
X2
-sK1+sTt
11+sT
refP
Model supported by PSSE
STV1 2 3
t
X1
1 - Int T2 - Int T3 - Unlimited Signal
States

Stabilizer STAB4
Stabilizer STAB4 Power-Sensitive Stabilizer
eP on machine MVA base
L1
L2−
+Σ X
X2
sK1+sT
a
X1
1+sT1+sTt
11+sT
refP
b
c
1+sT1+sT d
11+sT e
11+sT
Model supported by PSSE
STV1
2 3 4 5 6
d
1 - Input2 - Reset3 - LL14 - LL25 - T6 - Unlimited Signal
States

Stabilizer STBSVC
Stabilizer STBSVC WECC Supplementary Signal for Static var Compensator
Input Signal #1
Input Signal #2
S1
S7
K1+sT
S3K+
+Σ S13
S14
sT1+sT
SCS-V
SCSV
S3K
S2
S10
K1+sT
S11
S12
1+sT1+sT
S8
S9
1+sT1+sT
Model supported by PSSE
STV
1 2
3 4
5
1 - Transducer12 - LL13 - Transducer24 - LL25 - Washout
States

Stabilizer WSCCST
Stabilizer WSCCST WSCC Power System Stabilizer
+
qv
qv
K1+sT
T0V
signal j
speed 1accpw 2freq 3
− − − − − −
SMAXV
SLOWV
+
Model supported by PSLFBlocks in gray have not been implemented in Simulator
q
q
sT1+sT
'q2
q2
1+sT1+sT
'q1
q1
1+sT1+sT
'q3
q3
1+sT1+sT
TVΣ+−
1
11+sT
2
2
sT1+sT qsK+f(U)
k
+
'Vs
qs
11+sT
3
3
sT1+sT 4
s1+sT
tK−
−
+
Σ Σ
ΣU
1
2
3 4 5 6
KV
Sw1
01
0
d1
11+sT
d2
d2
sT1+sT
tlV
SV
TΔV >Vcutoff
ΣVcutoff
0
0≤+
+
T T0 TΔV =V -V
1 - Transducer12 - Transducer23 - WashoutTq4 - LL15 - LL26 - LL3
States

Stabilizer WT12A1 and WT1P
Stabilizer WT12A1 and WT1P Pseudo Governor Model for Type 1 and Type 2 Wind Turbines
Speed
genP
2
11+sT
−+Σ
1s
MINPI
MAXPI
IK
PE
11+sT
1
11+sT
II
1WT12A1 supported by PSSE with K =T
WT1P supported by PSLF
12
3 4
gen
I
1
mech
1 - P
2 - K3 - T4 - P
States
refω
droopKΣ
Σ
PK
refP
mechP+
+
−+
+

Stabilizer WT3P and WT3P1
Stabilizer WT3P and WT3P1 Pitch Control Model for Type 3 Wind Generator
ORDP
+Σ
MAX-RTheta
MAXRTheta
P
1sT
P PI MAX MAX MIN MIN MAX RATE
WT3P supported by PSLF T =T , Theta =PI , Theta =PI , and RTheta PI
WT3P1 supported by PSSE with no non-windup limits on pitch control=
12
3
1 - Pitch2 - PitchControl3 - PitchComp
States
refω
Σ
Σ
setP
Pitch
−
+
+
ω IPPP
KK +s
ICPC
KK +s
Σ
MAXTheta
M INTheta
MAXTheta
M INTheta
0
− −
+ +
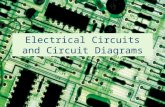
![Block and Level Diagrams - Yamaha Corporation · 2019. 7. 10. · Block and Level Diagrams-60dBu-50dBu-40dBu-30dBu-20dBu-10dBu 0dBu +10dBu +20dBu +30dBu +30dBu +40dBu [-26dBu] MONITOR](https://static.fdocument.org/doc/165x107/5ffd9fa3eff99e44a37f611f/block-and-level-diagrams-yamaha-corporation-2019-7-10-block-and-level-diagrams-60dbu-50dbu-40dbu-30dbu-20dbu-10dbu.jpg)