16 Macchine Asincrone
23
Macchine asincrone www.die.ing.unibo.it/pers/mastri/didattica.htm (versione del 16-3-2007) 2 Principio di funzionamento ● Si considera una spira libera di ruotare attorno ad un asse, posta in una regione in cui è presente un campo magnetico rotante con velocità angolare ω c ● Il flusso concatenato con la spira varia nel tempo ¨ Viene indotta una f.e.m e quindi nella spira circola corrente ¨ La spira è soggetta a forze che la fanno ruotare in senso concorde con il campo magnetico ● La rotazione della spira nello stesso senso del campo tende ad annullare la variazione del flusso concatenato ¨ In accordo con la legge di Lenz, le forze tendono ad opporsi alla causa che le ha generate
description
dispensa elettrotecnica
Transcript of 16 Macchine Asincrone

Macchine asincrone
www.die.ing.unibo.it/pers/mastri/didattica.htm(versione del 16-3-2007)
2
Principio di funzionamento
● Si considera una spira libera di ruotare attorno ad un asse, posta in una regione in cui è presente un campo magnetico rotante con velocitàangolare ωc
● Il flusso concatenato con la spira varia nel tempo
Viene indotta una f.e.m e quindi nella spira circola corrente
La spira è soggetta a forze che la fanno ruotare in senso concorde con il campomagnetico
● La rotazione della spira nello stesso sensodel campo tende ad annullare la variazionedel flusso concatenato
In accordo con la legge di Lenz, le forze tendono ad opporsi alla causa che le ha generate

3
Principio di funzionamento
● Idealmente la spira tende a porsi in rotazione alla stessa velocità del campo (velocità di sincronismo)
● In pratica la spira non può raggiungere la velocitàdel campo rotante perchè in queste condizioni il flusso concatenato è costante e quindi la coppia agente sulla spira si annulla
● A regime la spira ruota ad una velocità, inferiore alla velocità di sincronismo, incorrispondenza della quale la coppiadovuta al campo magnetico e la coppia resistente (ad es. dovuta all’attrito) si equilibrano
Da questo deriva il nome macchina asincrona
4
Macchina asincrona trifase con rotore avvolto
● Sullo statore e sul rotore sono disposti avvolgimenti del tipo visto nella lezione sul campo magnetico rotante
● Le fasi dell’avvolgimento di statore sonocollegate a stella (o a triangolo) ed alimen-tate da un sistema simmetrico di tensioni V1 V2 V3
● Le fasi dell’avvolgimento di rotore sonocollegate in parallelo tra loro
● Gli avvolgimenti delle tre fasi di statore sono uguali
si ha una terna equilibrata di correnti
viene generato un campo magnetico rotante
Statore
Rotore

5
F.e.m. indotte nel rotore (1)
● Ipotesi: rotore in moto con velocità angolare ωm
● Si considera una spira di larghezza τ collocata sul rotore
● Il flusso dovuto al campo rotante varia con periodo
cioè con pulsazione)(
22
mcmr Rvv
Tω−ω
τ=
−τ
=
)(2
)(22mc
mc
rr p
R
Tω−ω=
τω−ωπ
=π
=ω
6
Scorrimento
● Scorrimento:
Velocità angolare del campo rotante:Velocità angolare del rotore: ωmNumero di giri al minuto del campo rotante: ncNumero di giri al minuto del rotore: nm
s = 1 ωm = 0
s = 0 ωm = ωc
s < 0 ωm > ωc
s > 1 ωm e ωc hanno segni opposti
pc
ω=ω
c
mc
c
mc
n
nns
−=
ωω−ω
=

7
F.e.m. indotte nel rotore (2)
● La velocità angolare del rotore può essere espressa come
● La pulsazione del flusso concatenato con la spira posta sul rotore è
● Le f.e.m. indotte nell’avvolgimento di rotore hanno pulsazione sω
● Procedendo come nel caso dello statore, si ottiene che la f.e.m. indotta in una fase è
kar = fattore di avvolgimento del rotore
NSr = numero di spire per fase dell’avvolgimento di rotore
cm s ω−=ω )1(
ω=ω=ω−ω=ω sspp cmcr )(
PΦΕ Srar Nkjsω−=
8
F.e.m. indotte nel rotore (3)
● Gli avvolgimenti delle fasi di rotore sono identici e traslati l’uno rispetto all’altro di 2/3 di passo polare
● Le f.e.m. indotte nelle tre fasi sono identiche e sfasate in ritardo l’una rispetto all’altra di 2π/3 terna simmetrica
● Si può rappresentare il rotore mediante lo schema seguente
i generatori rappresentano le f.e.m. indotte
le impedenze rappresentano le resistenze ele induttanze di dispersione degli avvolgimenti
Le tensioni ai terminali delle fasi di rotore sono nulle
0)(3
13
321
321AB
=++=
=++
=
EEE
Y
YEYEYEV

9
Reazione del rotore ad un campo rotante
● Le correnti negli avvolgimenti di rotore formano una terna equilibrata
Le correnti di rotore generano un campo magnetico rotante
● La velocità di rotazione del campo rispetto al rotore è
● La velocità rispetto allo statore risulta
I campi magnetici di statore e di rotore ruotano alla stessa velocità
Per ωm costante, l’interazione tra i campi di statore e rotore dà luogo ad una coppia costante nel tempo tra gli avvolgimenti
● Se le velocità di rotazione fossero diverse la coppia avrebbe valore medio nullo perché il anche suo segno varierebbe nel tempo
ccr sp
s' ω=
ω=ω
( ) cccmccr sss ω=ω−+ω=ω+ω=ω 1
10
Equazioni interne
Ipotesi
● La macchina funziona in condizioni di regime
● La velocità del rotore è costante
● Lo statore è alimentato da una terna di tensioni simmetrica
● Le linee di campo possono essere suddivise in due gruppi
linee che attraversano il traferro e si concatenano sia con l’avvolgimento di statore sia con quello di rotore
flusso principale
linee che si concatenano con il solo avvolgimento di statore o con il solo avvolgimento di rotore
flussi di dispersione

11
Equazioni interne (1)
● Dato che sia la gli avvolgimenti che le tensioni di alimentazione sono simmetrici è sufficiente scrivere le equazioni relative alla prima fase di statore e di rotore
● Avvolgimento di statore
R1 = resistenza di una fase
Ld1 = induttanza di dispersione di una fase
Φ = flusso concatenato con la spira centrale dello statore
ka1 = fattore di avvolgimento
NS1 = numero di spire per fase
ΦIV 111111 )( Sad NkjLjR ω+ω+=
12
Equazioni interne (2)
● Avvolgimento di rotore
R2 = resistenza di una fase
Ld2 = induttanza di dispersione di una fase
Φ’ = flusso concatenato con la spira centrale dello statore
ka2 = fattore di avvolgimento
NS2 = numero di spire per fase
● I fasori I’2 e Φ’ non sono omogenei con quelli che compaiono nell’equa-zione dello statore, perché rappresentano grandezze con pulsazione sω
'Nkjs'LjsR Sad ΦI 22222 )(0 ω+ω+=

13
Teorema di equivalenza delle macchine asincrone
● Una macchina asincrona funzionante ad una generica velocità (a cui corrisponde lo scorrimento s) equivale, per quanto riguarda il funziona-mento elettrico, alla stessa macchina con il rotore bloccato e con le fasi del rotore che alimentano ciascuna una resistenza pari a R2(1−s)/s , essendo R2 la resistenza di una fase rotorica
● Tensioni correnti e campi magnetici nella macchina reale e in quella equivalente sono uguali
● Le grandezze relative al rotore hanno frequenze diverse, ma hanno le stessa ampiezze e gli stessi sfasamenti reciproci
La potenza assorbita dall’alimentazione e le potenze dissipate per effetto Joule sono uguali
Nella macchina equivalente la potenza meccanica erogata all’albero èsimulata dalla potenza dissipata sulle resistenze di carico R2(1−s)/s
14
Teorema di equivalenza delle macchine asincrone
● Le equazioni della macchina equivalente sono
(per semplicità si assume che i punti centrali delle fasi di statore e di rotore siano coincidenti)
● La dimostrazione del teorema si basa sul fatto che l’equazione di rotore della macchina reale può essere posta nella forma
ΦI
ΦIV
222222
111111
10
)(
Sad
Sad
NkjLjs
sRR
NkjLjR
ω+⎟⎠⎞
⎜⎝⎛ ω+
−+=
ω+ω+=
'Nkj'Ljs
sRR
'Nkj'Ljs
R
Sad
Sad
ΦI
ΦI
222222
22222
1
0
ω+⎟⎠⎞
⎜⎝⎛ ω+
−+=
=ω+⎟⎠⎞
⎜⎝⎛ ω+=

15
Equazioni interne (3)
● Facendo riferimento alla macchina equivalente, applicando la legge di Hopkinson si può ricavare per il circuito magnetico un’equazione del tipo
Complessivamente le equazioni interne sono
ΦII R=+ 222111 sasa NkNk
ΦII
ΦI
ΦIV
R=+
ω+⎟⎠⎞
⎜⎝⎛ ω+
−+=
ω+ω+=
222111
222222
111111
10
)(
sasa
Sad
Sad
NkNk
NkjLjs
sRR
NkjLjR
16
Circuito equivalente
● Formalmente le equazioni interne di una macchina asincrona coincidono con quelle di un trasformatore
il cui primario ha ka1NS1 spire
il cui secondario ha ka2NS2 spire ed è chiuso su una resistenza di carico R2(1−s)/s
Possono essere interpretate mediante un circuito equivalente analogo a quello del trasformatore
● In analogia a quanto si è fatto per il trasformatore si pone
● Inoltre, come nel caso del trasformatore, si può aggiungere una resistenza R0 per tenere conto delle perdite nel ferro
0
0
11
211
0110
)(
Xj
Nk
NkXNkj
Sa
SaSa
VΦIΦV −===ω= μ
RR

17
Circuito equivalente
000
211
221
011
222222
01111
11
10
)(
VIIII
VI
VIV
⎟⎟⎠
⎞⎜⎜⎝
⎛−=+=+
+⎟⎠⎞
⎜⎝⎛ +
−+=
++=
μ Xj
RNk
Nk
Nk
NkjX
s
sRR
jXR
asa
sa
Sa
Sad
d
18
Circuito equivalente riferito a statore
2
2
22
1112
2
2
22
1112
dSa
Sad
Sa
Sa
XNk
NkX
RNk
NkR
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
211
2212 I
Nk
NkI
Sa
Sa⎟⎟⎠
⎞⎜⎜⎝
⎛=

19
Coppia
● La potenza meccanica erogata dalla macchina può essere determinata valutando la potenza dissipata sulle resistenze di carico
● Dalla potenza meccanica si può ricavare la coppia
222
13 I
s
sRPm
−=
s
IRp
sp
Is
sRP
Cm
m222
222
3)1(
13
ω=
−ω
−
=ω
=
20
Caratteristica meccanica
● Caratteristica meccanica: andamento della coppia in funzione dello scorrimento a tensione di alimentazione V1 costante
● Se si trascurano le cadute su R1 e Xd1, a V1 costante Φ è costante
● Dalle equazioni interne si ricava
dove E2 rappresenta la f.e.m. indotta in una fase di rotore
la caratteristica meccanica è definita dalla relazione
)(3
22
222
222
dXsR
EsRpC
+ω=
22
2
222
222 1
dd
Sa
jsXR
s
jXs
sRR
Nkj
+−=
+−
+
ω−=
EΦI
ΦE 222 Sa Nkjω=

21
Caratteristica meccanica
● Da questa relazione si ricava che la coppia è massima per
● In queste condizioni la coppia vale
● Per s = 1 (rotore fermo) la coppia assume il valore (coppia di spunto)
2
22
max 23
dX
EpC
ω=
2
2
dX
Rs =
)(3
22
22
222
dXR
ERpC
+ω=
22
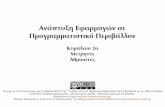
Caratteristica meccanica
Coppia in funzione dello scorrimento
V1 = cost.

23
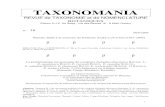
Caratteristica meccanica
Coppia in funzione del numero di giri
V1 = cost.
24
Caratteristiche elettromeccaniche
● Si considerano gli andamenti dei valori efficaci
della corrente di statore I1
della corrente di rotore ridotta a statore I12
in funzione di s a V1 costante
Le espressioni di I1 e I12 possono essere ricavate facendo riferimento al circuito equivalente
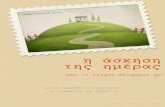
Le curve caratteristiche mostrano che le correnti assumono valori piuttosto elevati per s = 1 cioè quando il rotore è fermo (anche 5 volte il valore in condizioni di funzionamento nominale)

25
Caratteristica elettromeccanica
V1 = cost.
26
Rendimento
● Il rendimento è definito come rapporto tra la potenza meccanica erogata e la potenza elettrica assorbita
Pm = potenza meccanica
PCu1 = potenza dissipata per effetto Joule nell’avvolgimento di statore
PCu2 = potenza dissipata per effetto Joule nell’avvolgimento di rotore
PFe = potenza dissipata a causa delle perdite nel ferro
Le perdite nel ferro dipendono dalla frequenza
A regime la frequenza negli avvolgimenti di rotore è sf << f(f = frequenza della tensione di alimentazione)
le perdite nel ferro si riducono alle sole perdite di statore
FeCuCum
m
PPPP
P
+++=η
21

27
Rendimento
● Il rendimento può essere espresso come prodotto di due fattori
● Rendimento rotorico:
rapporto tra la potenza meccanica e la potenza elettrica totale assorbita dal rotore
● Rendimento statorico:
rapporto tra la potenza elettrica trasferita dallo statore al rotore e la potenza elettrica totale assorbita dallo statore
sr η⋅η=η
2Cum
mr PP
P η
+=
21
2
FeCuCum
Cums PPPP
PP η
++++
=
28
Rendimento
● Facendo riferimento al circuito equivalente si ottiene
Per ottenere rendimenti elevati occorre realizzare funzionamenticorrispondenti a piccoli valori dello scorrimento
21212
21212
21212
1
1
IRIs
sR
Is
sR
r
+−
−
=η
20
21212
211
21212
21212
21212
1
1
a
s
IRIRIRIs
sR
IRIs
sR
+++−
+−
=η
sr −=η 1

29
Regimi di funzionamento
● Pe = potenza elettrica assorbita
● Pm = potenza meccanica erogata
● Funzionamento da motore
Pe > 0 Pm > 0
● Funzionamento da generatore
Pe < 0 Pm < 0
● Funzionamento da freno
Pe > 0 Pm < 0
30
Regimi di funzionamento
● Dallo studio del circuito equivalente si può ricavare che la potenza elettrica assorbita (trascurando le perdite nel ferro) vale
● Si può verificare che Pe risulta negativa nell’intervallo di valori di scompreso tra gli zeri del numeratore s’ e s”
● In pratica risulta
s’ ≅ 0 (s’ < 0)
s” ≅ −R12/R1
● La potenza meccanica vale
è positiva per s compreso tra 0 e 1
[ ]2112
20
21
22102
1202
12
21
12)(
)(3 RRsRXsRXX
XXsR
IP d
de +++
++=
222
13 I
s
sRPm
−=

31
Regimi di funzionamento
32
Reostato di avviamento
● Allo spunto (s = 1, nm = 0)
la coppia ha generalmentevalori modesti
le correnti sono elevate
● La coppie e la corrente allo spunto dipendono dalla resistenza rotorica R2
al crescere di R2
la coppia aumenta
la corrente si riduce
● E’ possibile aumentare la coppia di spunto e ridurre la corrente colle-gando in serie agli avvolgimenti di rotore un reostato di avviamento
● Il collegamento avviene mediante contatti striscianti su tre anelli conduttori calettati sull’albero

33
Dipendenza della caratteristica meccanica da Ra
34
Avviamento
Progressiva esclusione del reostato di avviamento
Cr = coppia resistente dovuta al carico

35
Motori a gabbia
● I circuiti del rotore sono costituiti da un certo numero di sbarre massicce di rame o alluminio, ciascuna inserita in una cava, collegate tra loro mediante due anelli conduttori posti alle estremità del pacco di lamierini del rotore
Vantaggi dal punto di vista della semplicità costruttiva e del costo
● Le sbarre formano dei circuiti chiusiche sono percorsi dalle correntiindotte dal campo rotante
● Si può dimostrare che il numerodi poli determinato dalle correntiindotte coincide con quello delcampo rotante di statore
36
Motore a doppia gabbia
● Per aumentare la coppia di spunto e ridurre la corrente corrispondente, le sbarre dovrebbero avere una resistenza abbastanza elevata
● Una resistenza elevata dà luogo a regime, ad un basso rendimento e a uno scorrimento elevato
Per superare questo inconveniente si possono usare rotori con due gabbie concentriche
● La gabbia esterna è formata dasbarre con piccola sezione
resistenza elevata
piccola reattanza di dispersione
● La gabbia interna è formata da sbarre con sezione maggiore
resistenza minore
reattanza di dispersione maggiore(è maggiore la distanza dal traferro il flusso associato a linee di campo che si concatenano solo con la sbarra è maggiore)

37
Motore a doppia gabbia
● s = 1
la pulsazione delle correnti di rotore è ωωLdi >> Re la corrente circola prevalentemente nella gabbia esterna
● s → 0
la pulsazione delle correnti di rotore è sω → 0sωLdi → 0 la corrente circola prevalentemente nella gabbia interna
ie
ie
LL
RR
<<>>
38
Caratteristica meccanica del motore a doppia gabbia
Gabbia interna
Gabbia esterna

39
Motore a sbarre profonde
● Si ha un comportamento simile a quello del motore a doppia gabbia utilizzando sbarre allungate in senso radiale
● Si possono considerare le sbarrecome formate da più conduttori collegati in parallelo
● All’avviamento la corrente tendead addensarsi negli stati più vici-ni al traferro
● All’aumentare della velocità la corrente tende a distribuirsi in modo uniforme nella sezione
● Nel motore a doppia gabbia all’avviamento la gabbia esterna risulta piùsollecitata dal punto di vista termico
● Nel motore a sbarre profonde la sollecitazione termica è distribuita in modo più uniforme nel conduttore
I motori a sbarre profonde sono preferiti nel caso di potenze elevate
40
Motori asincroni monofase
● L’avvolgimento di rotore è costituito da una sola fase
● Il rotore è generalmente a gabbia
● L’avvolgimento di statore produce due campi controrotanti con velocitàωc = ω/p ma con versi opposti
● Si può definire uno scorrimento riferito al campo diretto e uno riferito al campo inverso
● Ciascuno dei campi rotanti, se agisse da solo, darebbe luogo a una coppia legata al corrispondente scorrimento dalla relazione che valeper le macchine trifase
c
mcsω
ω−ω=
ss'c
mc −=ω−
ω−ω−= 2

41
Motori asincroni monofase
● Se sono trascurabili gli effetti della non linearità del nucleo, è possibile ricavare la caratteristica meccanica sovrapponendo le caratteristiche relative al campo diretto e al campo inverso
● Per s = 1 (rotore fermo) la coppia diretta e la coppia inversa sono uguali e opposte
la coppia di spunto è nulla
● Quando il rotore è in moto la coppia dovuta al campo rotante con verso concorde con quello del rotore prevale sull’altra
il motore è in grado di mantenersi in rotazione
● Affinché il motore monofase sia praticamente utilizzabile occorre dotarlo di un dispositivo di avviamento
● Generalmente si sfrutta un avvolgimento ausiliario ruotato rispetto all’avvolgimento principale e alimentato da una corrente sfasata dello stesso angolo rispetto alla corrente principale (cioè si realizza un sistema che approssima il comportamento di un motore bifase)
42
Caratteristica meccanica di un motore monofase
Coppia diretta
Coppia inversa

43
Motore monofase con avviamento a resistenza
● Si utilizza un avvolgimento ausiliario ruotato di 90° ed avente resistenza molto grande rispetto a quella dell’avvolgimento principale
Le correnti negli avvolgimenti sono approssimativamente in quadratura
Viene prodotto un campo rotante
● Per avere un buon rendimento in condizioni di regime l’avvolgimento ausiliario viene escluso mediante un interruttore centrifugoche interviene quando il motore ha raggiunto una sufficiente velocità
Avvolgimentoprincipale
Avvolgimentoausiliario
Interruttorecentrifugo
44
Motore monofase con avviamento a capacità
● L’avvolgimento ausiliario viene collegato ad un condensatore in modo che la corrente risulti approssimativamente in quadratura in anticipo rispetto alla corrente dell’avvolgimento principale
Avvolgimentoprincipale
Avvolgimentoausiliario

45
Motore monofase con avviamento a capacità
● Per ottimizzare le prestazioni si possono utilizzare due condensatori, uno dei quali viene escluso dopo l’avviamento mediante un interruttore centrifugo
● La capacità aggiuntiva permette di avere una maggiore copia di spunto
● Mantenere uno dei condensatori sempre inserito rende il funzionamen-to del motore più regolare (migliore rendimento e fattore di potenza)
Avvolgimentoprincipale
Avvolgimentoausiliario
Interruttorecentrifugo
46
Motore monofase con poli schermati
● Lo statore presenta delle espansioni polari su cui è disposto l’avvolgimento principale
● Nelle espansioni polari sono presenti dei tagli in cui vengono inseriti gli avvolgimenti di schermatura, costituiti da un’unica spira cortocircuitata di grossa sezione
● La corrente indotta negli avvolgimenti di schermatura genera un flusso sfasatorispetto a quello principale
● Lo sfasamento consente di produrre un debole campo rotante, sufficientea fornire una coppia di spunto ade-guata ad applicazioni che richiedono piccole potenze