





γλώσσες
Σελίδες
Νομικός


Συστήµατα Ελέγχου µε Μικροϋπολογιστές Κων/νος Κυριακόπουλος Καθηγητής ΕΜΠ
@ [email protected] ! http://users.ntua.gr/kkyria
ΑΕΡΟΔΙΑΣΤΗΜΙΚΗ
ΕΝΕΡΓΕΙΑΚΑ ΣΥΣΤΗΜΑΤΑ
ΡΟΜΠΟΤΙΚΗ – ΒΙΟΜΗΧΑΝΙΚΟΣ ΑΥΤΟΜΑΤΙΣΜΟΣ
Δομή της Ύλης του Μαθήματος
• ΘΕΩΡΙΑ – Ειδικά Κεφάλαια Σχεδίασης Συστημάτων Ελέγχου
• Παρακολούθηση Εισόδου Βαθμίδας (με Ανατροφοδότηση Κατάστασης) • Παρατηρητές και Ανατροφοδότηση Εξόδου
– Συστήματα Ενσωματωμένου Ελέγχου (Embedded Control Systems) • Εισαγωγή: Αναγκαιότητα Ψηφιακών Συστημάτων Ελέγχου • Μετατροπές μεταξύ Αναλογικών και Ψηφιακών Σημάτων • Μετασχηματισμός Ζ – Συστήματα Διακριτού Χρόνου • Ψηφιακός Έλεγχος με Σχεδίαση στο Συνεχές Πεδίο • Ευστάθεια – Ελεγξιμότητα – Παρατηρησιμότητα • Ψηφιακός Έλεγχος με Σχεδίαση στο Διακριτό Πεδίο:
– Ανάδραση Κατάστασης – Ανάδρασης Εξόδου – Παρατηρητές
• Εκτίμηση Κατάστασης -‐ το Φίλτρο Kalman • Εισαγωγή στην Αναγνώριση Συστημάτων
• Εφαρμογές • Αρχιτεκτονική & Προγραμματισμός του ArduinoTM . • Η γλώσσα C ως εργαλείο προγραμματισμού ενσωματωμένων συστημάτων
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 2
Παρακολούθηση Εισόδου Βαθμίδας
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 3
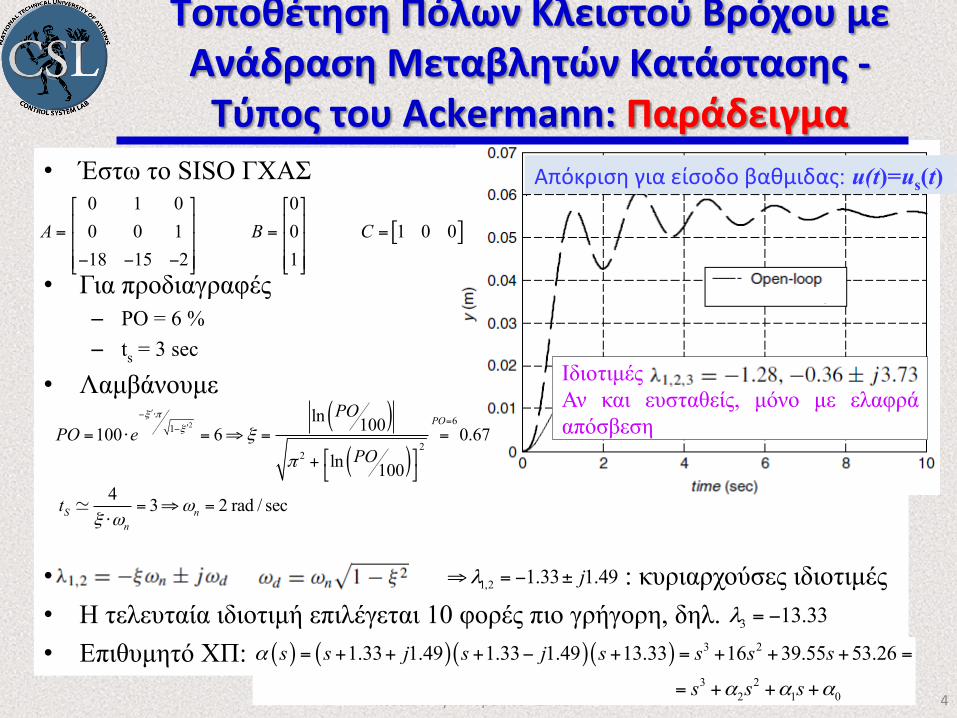
• Έστω το SISO ΓΧΑΣ
• Για προδιαγραφές – PO = 6 % – ts = 3 sec
• Λαµβάνουµε
• : κυριαρχούσες ιδιοτιµές • Η τελευταία ιδιοτιµή επιλέγεται 10 φορές πιο γρήγορη, δηλ. • Επιθυµητό ΧΠ:
Ιδιοτιµές Αν και ευσταθείς, µόνο µε ελαφρά απόσβεση
Τοποθέτηση Πόλων Κλειστού Βρόχου με Ανάδραση Μεταβλητών Κατάστασης -‐ Τύπος του Ackermann: Παράδειγμα
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 4
[ ]0 1 0 00 0 1 0 1 0 018 15 2 1
A B C⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥= = =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥− − −⎣ ⎦ ⎣ ⎦
( )( )
2 61
22
ln 100100 6 0.67ln 100
POPO
PO ePO
ξ πξ ξ
π
ʹ′− ⋅=
ʹ′−= ⋅ = ⇒ = =⎡ ⎤+⎣ ⎦
4 3 2 rad / secS nn
t ωξ ω
= ⇒ =⋅
!
1,2 1.33 1.49jλ⇒ = − ±
3 13.33λ = −
( ) ( )( )( ) 3 2
3 22 1 0
1.33 1.49 1.33 1.49 13.33 16 39.55 53.26s s j s j s s s s
s s s
α
α α α
= + + + − + = + + + =
= + + +
Απόκριση για είσοδο βαθμιδας: u(t)=us(t)
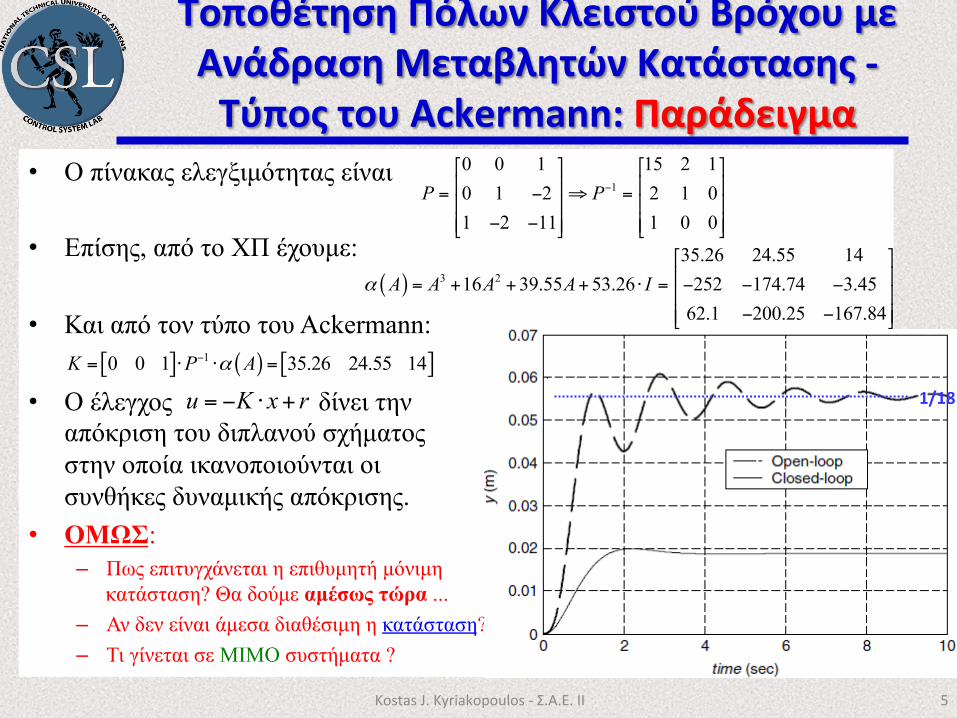
• Ο πίνακας ελεγξιµότητας είναι
• Επίσης, από το ΧΠ έχουµε:
• Και από τον τύπο του Ackermann:
• Ο έλεγχος δίνει την απόκριση του διπλανού σχήµατος στην οποία ικανοποιούνται οι συνθήκες δυναµικής απόκρισης.
• ΟΜΩΣ: – Πως επιτυγχάνεται η επιθυµητή µόνιµη κατάσταση? Θα δούµε αµέσως τώρα ...
– Αν δεν είναι άµεσα διαθέσιµη η κατάσταση? – Τι γίνεται σε MIMO συστήµατα ?
Τοποθέτηση Πόλων Κλειστού Βρόχου με Ανάδραση Μεταβλητών Κατάστασης -‐ Τύπος του Ackermann: Παράδειγμα
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 5
1
0 0 1 15 2 10 1 2 2 1 01 2 11 1 0 0
P P−
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥= − ⇒ =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥− −⎣ ⎦ ⎣ ⎦
( ) 3 2
35.26 24.55 1416 39.55 53.26 252 174.74 3.45
62.1 200.25 167.84A A A A Iα
⎡ ⎤⎢ ⎥= + + + ⋅ = − − −⎢ ⎥⎢ ⎥− −⎣ ⎦
[ ] ( ) [ ]10 0 1 35.26 24.55 14K P Aα−= ⋅ ⋅ =
u K x r= − ⋅ + 1/18
• Μέχρι στιγµής δόθηκε έµφαση στη µεταβατική απόκριση. • Τώρα θα ασχοληθούµε µε τη µονιµη κατάσταση µε έµφαση στη παρακολούθηση εισόδου βαθµίδας µέσω δύο (2) προσεγγίσεων: – Ενσωµάτωση της εισόδου αναφοράς στο νόµο ελέγχου µε ανατροφοδότηση κατάστασης.
– Σερβοµηχανισµοί: Ενσωµάτωση ολοκληρωτικού παράγοντα του σφάλµατος στο νόµο ελέγχου µε ανατροφοδότηση κατάστασης.
Παρακολούθηση Εισόδου Βαθμίδας
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 6
• Αν στο ΓΧΑΣ χρησιµοποιήσουµε όχι το συνήθη νόµο ελέγχου αλλά
• τότε το σύστηµα κλειστού βρόχου είναι
• Με είσοδο αναφοράς η σαφής προδιαγραφή είναι
• Προφανώς • Όλη η ανάλυση που θα ακολουθήσει προϋποθέτει ότι
– m ≥ p, δηλαδή αριθµό εισόδων µεγαλύτερο ή ίσο αυτό των εξόδων, και – Κ τέτοιο ώστε το σύστηµα κλειστού βρόχου είναι ασυµπτωτικά ευσταθές.
• Ο πίνακας µεταφοράς κλειστού βρόχου είναι
• Επειδή ⇒ • Για να είναι πρέπει = ? ? ?
Παρακολούθηση Εισόδου Βαθμίδας: Κέρδος Εισόδου Αναφοράς
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 7
( ) ( ) ( )x t A x t B u t= ⋅ + ⋅!
( ) ( ), p m py t r t G ×∈ ⇒ ∈! !
( ) ( ) 1 p pCLH s C s I A B K B G− ×= ⋅ ⋅ − + ⋅ ⋅ ∈!
u t( ) = −K ⋅ x t( ) +G ⋅r t( )u t( ) = −K ⋅ x t( ) + r t( )
∈! p
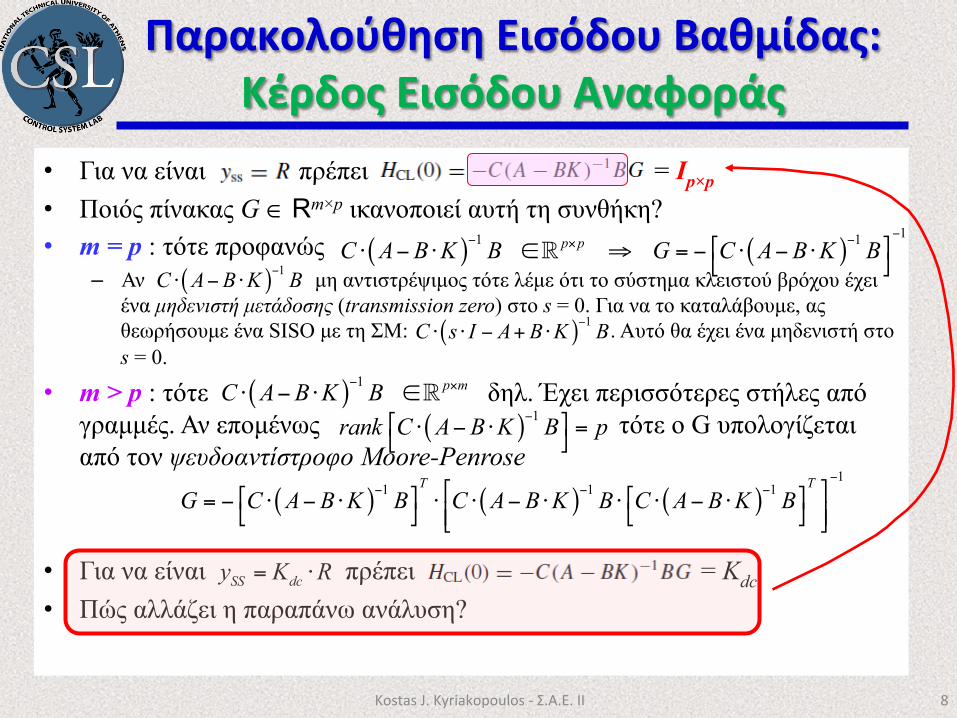
• Για να είναι πρέπει = Ιp×p
• Ποιός πίνακας G ∈ Rm×p ικανοποιεί αυτή τη συνθήκη? • m = p : τότε προφανώς
– Αν µη αντιστρέψιµος τότε λέµε ότι το σύστηµα κλειστού βρόχου έχει ένα µηδενιστή µετάδοσης (transmission zero) στο s = 0. Για να το καταλάβουµε, ας θεωρήσουµε ένα SISO µε τη ΣΜ: . Αυτό θα έχει ένα µηδενιστή στο s = 0.
• m > p : τότε δηλ. Έχει περισσότερες στήλες από γραµµές. Αν εποµένως τότε ο G υπολογίζεται από τον ψευδοαντίστροφο Moore-Penrose
• Για να είναι πρέπει = Κdc
• Πώς αλλάζει η παραπάνω ανάλυση?
Παρακολούθηση Εισόδου Βαθμίδας: Κέρδος Εισόδου Αναφοράς
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 8
( ) ( )11 1p pC A B K B G C A B K B−− −× ⎡ ⎤⋅ − ⋅ ∈ ⇒ = − ⋅ − ⋅⎣ ⎦!
( ) 1C A B K B−⋅ − ⋅
( ) 1C s I A B K B−⋅ ⋅ − + ⋅
( ) 1 p mC A B K B− ×⋅ − ⋅ ∈!
( ) 1rank C A B K B p−⎡ ⎤⋅ − ⋅ =⎣ ⎦
( ) ( ) ( )1
1 1 1T TG C A B K B C A B K B C A B K B
−− − −⎡ ⎤⎡ ⎤ ⎡ ⎤= − ⋅ − ⋅ ⋅ ⋅ − ⋅ ⋅ ⋅ − ⋅⎢ ⎥⎣ ⎦ ⎣ ⎦⎣ ⎦
SS dcy K R= ⋅
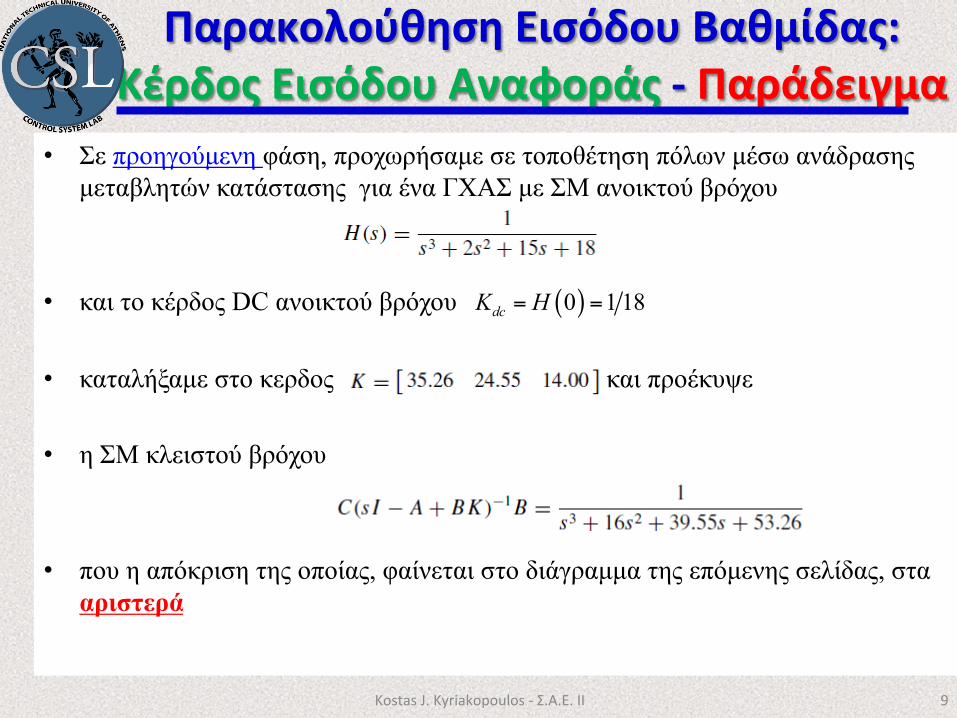
• Σε προηγούµενη φάση, προχωρήσαµε σε τοποθέτηση πόλων µέσω ανάδρασης µεταβλητών κατάστασης για ένα ΓΧΑΣ µε ΣΜ ανοικτού βρόχου
• και το κέρδος DC ανοικτού βρόχου
• καταλήξαµε στο κερδος και προέκυψε
• η ΣΜ κλειστού βρόχου
• που η απόκριση της οποίας, φαίνεται στο διάγραµµα της επόµενης σελίδας, στα αριστερά
Παρακολούθηση Εισόδου Βαθμίδας: Κέρδος Εισόδου Αναφοράς -‐ Παράδειγμα
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 9
( )0 1 18dcK H= =
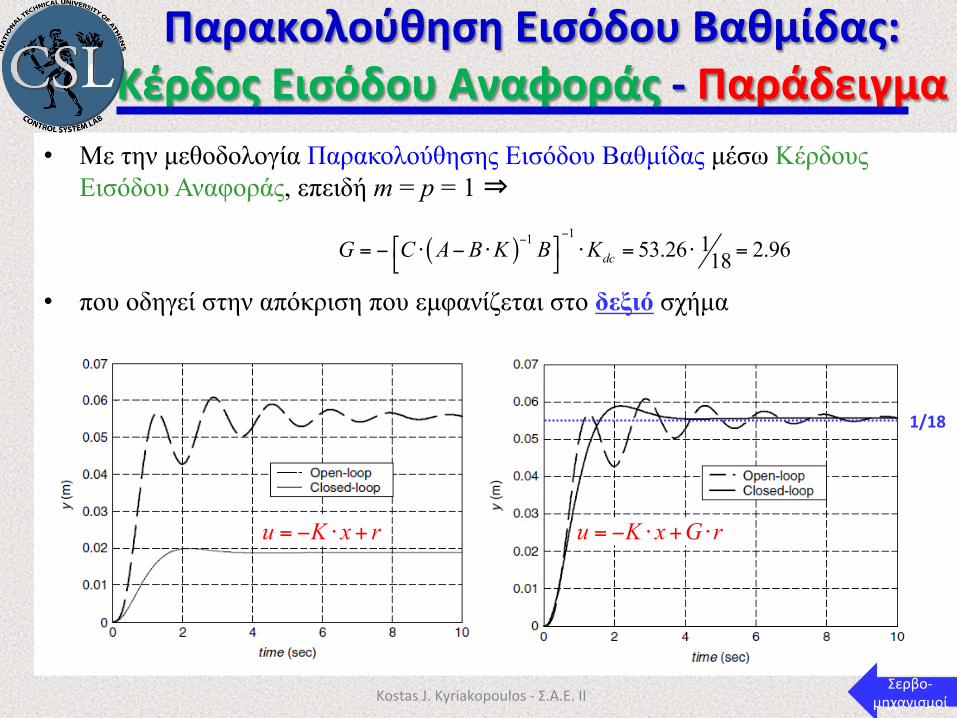
• Με την µεθοδολογία Παρακολούθησης Εισόδου Βαθµίδας µέσω Κέρδους Εισόδου Αναφοράς, επειδή m = p = 1 ⇒
• που οδηγεί στην απόκριση που εµφανίζεται στο δεξιό σχήµα
Παρακολούθηση Εισόδου Βαθμίδας: Κέρδος Εισόδου Αναφοράς -‐ Παράδειγμα
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 10
( )11 153.26 2.9618dcG C A B K B K−−⎡ ⎤= − ⋅ − ⋅ ⋅ = ⋅ =⎣ ⎦
u K x r= − ⋅ + u K x G r= − ⋅ + ⋅
Σερβο-‐μηχανισμοί
1/18
• Είδαµε ότι ο υπολογισµός του κέρδους G προϋποθέτει τον υπολογισµό του παράγοντα , ο οποίος στηρίζεται αποκλειστικά στις παραµέτρους του µοντέλου του συστήµατος.
• Μια τέτοια προσέγγιση δεν είναι «εύρωστη» (robust) γιατι στην πράξη συµβαίνουν τα παρακάτω: – Αβεβαιότητα ακριβούς γνώσης των παραµέτρων (A, B, C) του συστήµατος – Προσεγγιστική παράσταση του συστήµατος (µη θεώρηση όρων άγνωστης ή πολύπλοκης δυναµικής)
– Μεταβολή των παραµέτρων του συστήµατος.
• Πως µπορούµε να εξασφαλίσουµε καλή απόδωση υπό αυτές τις συνθήκες? • Εδώ προτείνεται ο συνδυασµός
– της µεθοδολογίας χρήσης ενός ολοκληρωτή του σφάλµατος, και – των προηγουµένων µεθοδολογιών ανάδρασης µεταβλητών κατάστασης.
Σχεδιασμός «Σερβομηχανισμού»
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 11
• Προτείνεται ο συνδυασµός – της µεθοδολογίας χρήσης ενός ολοκληρωτή του σφάλµατος, και – των προηγουµένων µεθοδολογιών ανάδρασης µεταβλητών κατάστασης.
• Η προτεινόµενη µεθοδολογία είναι εύρωστη αναφορικά µε τις αβεβαιότητες των παραµέτρων ανοικτού βρόχου µε την έννοια ότι: – Διασφαλίζεται η παρακολούθηση της εισόδου βαθµίδας, – Εφόσον η ευστάθεια κλειστού βρόχου είναι δεδοµένη.
• Εδώ, θεωρούµε την περίπτωση SISO και στηριζόµαστε στις παρακάτω προϋποθέσεις:
1) Το ζεύγος (Α,Β) είναι ελέγξιµο 2) To 0 δεν ειναι πόλος του συστήµατος ανοικτού βρόχου 3) To 0 δεν ειναι µηδενιστής του συστήµατος ανοικτού βρόχου
Σχεδιασμός «Σερβομηχανισμού»
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 12
Δηλαδή: το s=0 δεν είναι ούτε πόλος ούτε μηδενιστής του συστήματος ανοικτού βρόχου
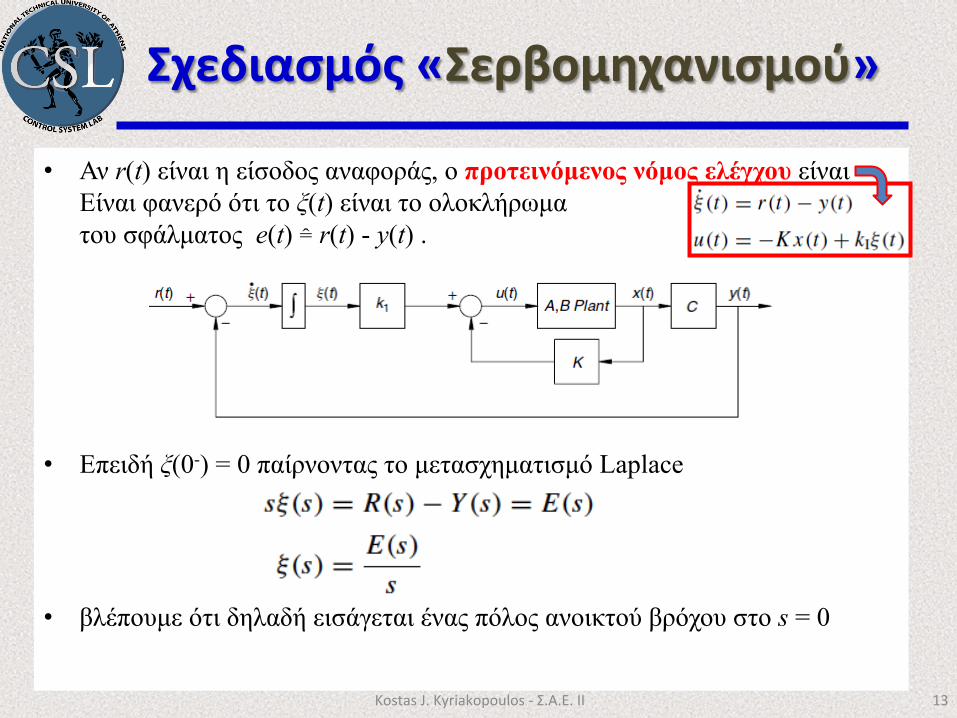
• Αν r(t) είναι η είσοδος αναφοράς, ο προτεινόµενος νόµος ελέγχου είναι Eίναι φανερό ότι το ξ(t) είναι τo ολοκλήρωµα του σφάλµατος e(t) ≙ r(t) - y(t) .
• Επειδή ξ(0-) = 0 παίρνοντας το µετασχηµατισµό Laplace
• βλέπουµε ότι δηλαδή εισάγεται ένας πόλος ανοικτού βρόχου στο s = 0
Σχεδιασμός «Σερβομηχανισμού»
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 13
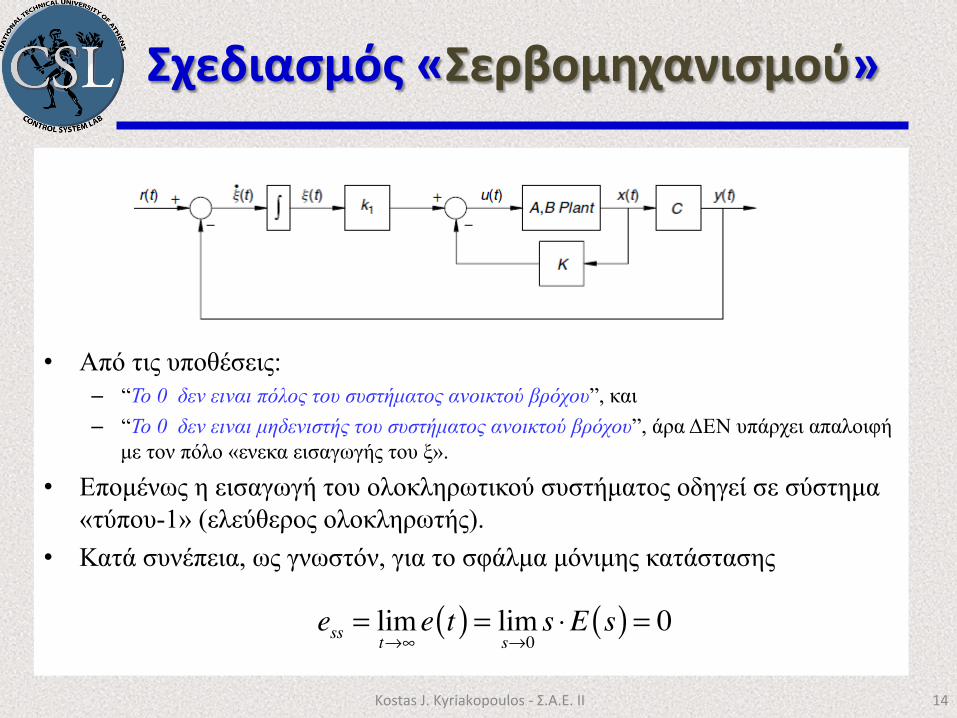
• Από τις υποθέσεις:
– “To 0 δεν ειναι πόλος του συστήµατος ανοικτού βρόχου”, και – “To 0 δεν ειναι µηδενιστής του συστήµατος ανοικτού βρόχου”, άρα ΔΕΝ υπάρχει απαλοιφή
µε τον πόλο «ενεκα εισαγωγής του ξ».
• Εποµένως η εισαγωγή του ολοκληρωτικού συστήµατος οδηγεί σε σύστηµα «τύπου-1» (ελεύθερος ολοκληρωτής).
• Κατά συνέπεια, ως γνωστόν, για το σφάλµα µόνιµης κατάστασης
Σχεδιασμός «Σερβομηχανισμού»
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 14
ess = limt→∞e t( ) = lim
s→0s ⋅E s( ) = 0
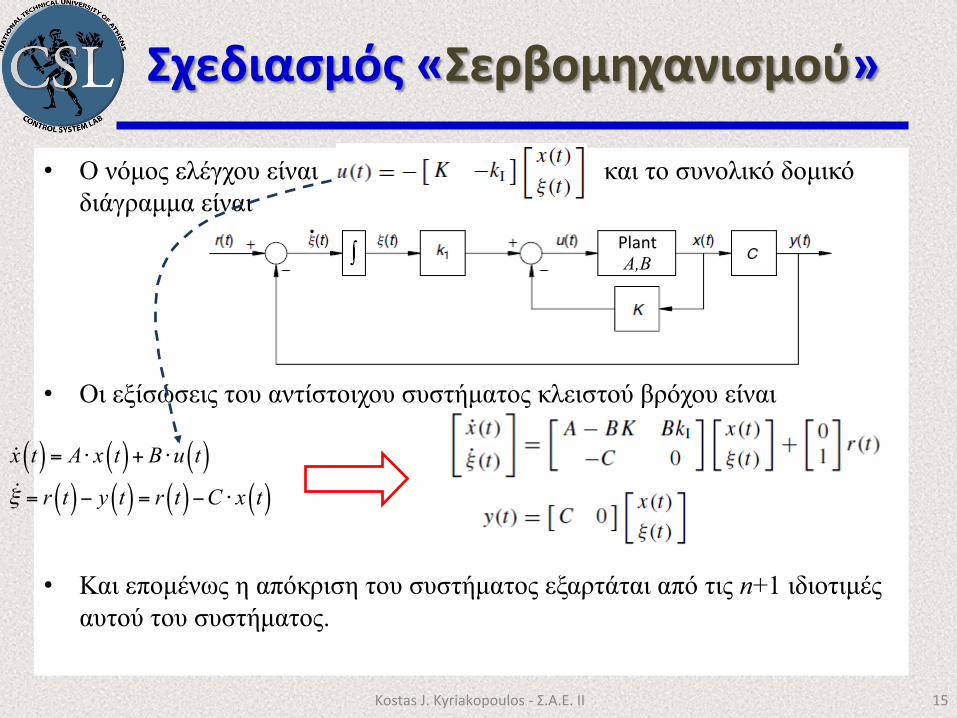
• Ο νόµος ελέγχου είναι και το συνολικό δοµικό διάγραµµα είναι
• Οι εξίσώσεις του αντίστοιχου συστήµατος κλειστού βρόχου είναι
• Και εποµένως η απόκριση του συστήµατος εξαρτάται από τις n+1 ιδιοτιµές αυτού του συστήµατος.
Σχεδιασμός «Σερβομηχανισμού»
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 15
Plant A,B
!x t( ) = A ⋅ x t( )+ B ⋅u t( )!ξ = r t( )− y t( ) = r t( )−C ⋅ x t( )
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ
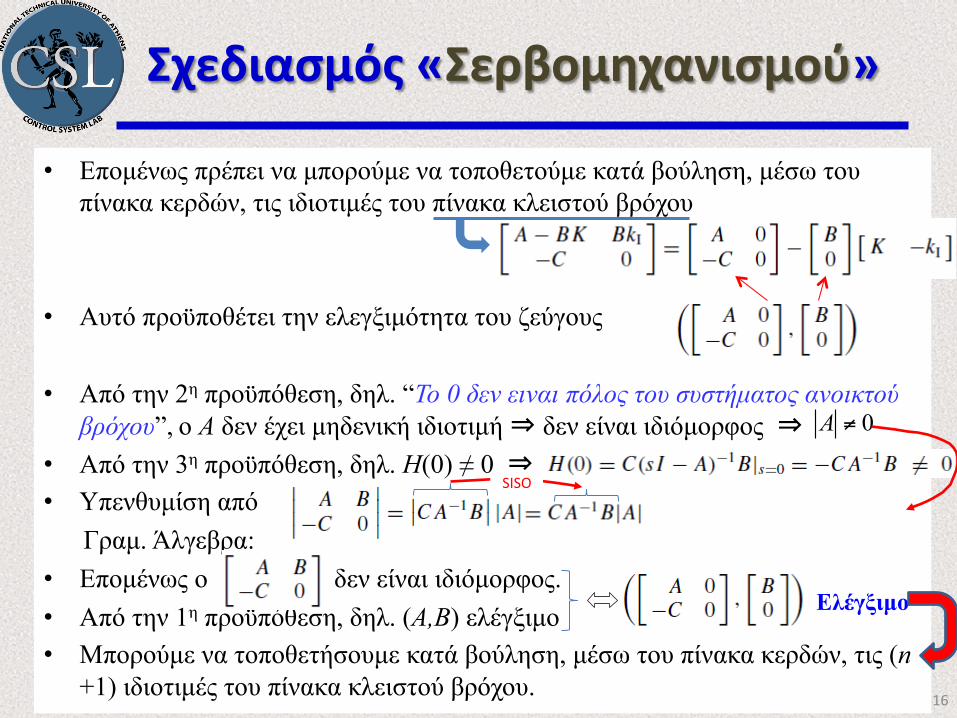
• Εποµένως πρέπει να µπορούµε να τοποθετούµε κατά βούληση, µέσω του πίνακα κερδών, τις ιδιοτιµές του πίνακα κλειστού βρόχου
• Αυτό προϋποθέτει την ελεγξιµότητα του ζεύγους
• Από την 2η προϋπόθεση, δηλ. “To 0 δεν ειναι πόλος του συστήµατος ανοικτού βρόχου”, ο Α δεν έχει µηδενική ιδιοτιµή ⇒ δεν είναι ιδιόµορφος ⇒
• Από την 3η προϋπόθεση, δηλ. Η(0) ≠ 0 ⇒ • Υπενθυµίση από Γραµ. Άλγεβρα: • Εποµένως ο δεν είναι ιδιόµορφος. • Από την 1η προϋπόθεση, δηλ. (Α,Β) ελέγξιµο • Μπορούµε να τοποθετήσουµε κατά βούληση, µέσω του πίνακα κερδών, τις (n
+1) ιδιοτιµές του πίνακα κλειστού βρόχου.
Σχεδιασμός «Σερβομηχανισμού»
16
0A ≠
SISO
Ελέγξιµο
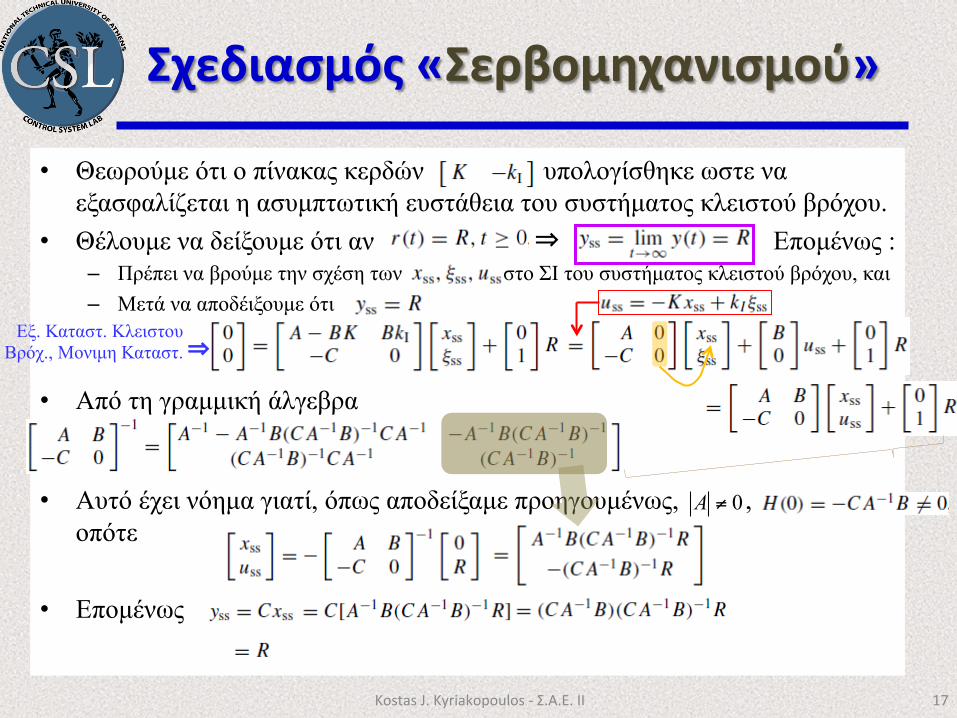
• Θεωρούµε ότι ο πίνακας κερδών υπολογίσθηκε ωστε να εξασφαλίζεται η ασυµπτωτική ευστάθεια του συστήµατος κλειστού βρόχου.
• Θέλουµε να δείξουµε ότι αν ⇒ Εποµένως : – Πρέπει να βρούµε την σχέση των στο ΣΙ του συστήµατος κλειστού βρόχου, και – Μετά να αποδέιξουµε ότι
• Από τη γραµµική άλγεβρα
• Αυτό έχει νόηµα γιατί, όπως αποδείξαµε προηγουµένως, , οπότε
• Εποµένως
Σχεδιασμός «Σερβομηχανισμού»
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 17
0A ≠
Εξ. Καταστ. Κλειστου Βρόχ., Μονιµη Καταστ. ⇒
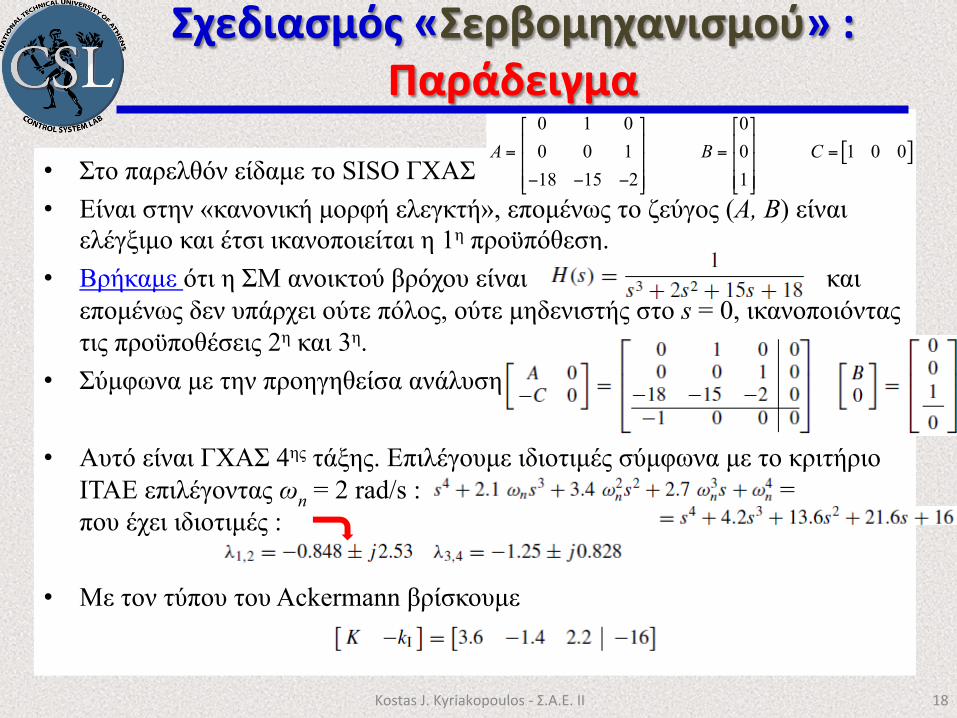
• Στο παρελθόν είδαµε το SISO ΓΧΑΣ • Είναι στην «κανονική µορφή ελεγκτή», εποµένως το ζεύγος (Α, Β) είναι ελέγξιµο και έτσι ικανοποιείται η 1η προϋπόθεση.
• Βρήκαµε ότι η ΣΜ ανοικτού βρόχου είναι και εποµένως δεν υπάρχει ούτε πόλος, ούτε µηδενιστής στο s = 0, ικανοποιόντας τις προϋποθέσεις 2η και 3η.
• Σύµφωνα µε την προηγηθείσα ανάλυση
• Αυτό είναι ΓΧΑΣ 4ης τάξης. Επιλέγουµε ιδιοτιµές σύµφωνα µε το κριτήριο ΙΤΑΕ επιλέγοντας ωn = 2 rad/s : = που έχει ιδιοτιµές :
• Με τον τύπου του Ackermann βρίσκουµε
Σχεδιασμός «Σερβομηχανισμού» : Παράδειγμα
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 18
[ ]0 1 0 00 0 1 0 1 0 018 15 2 1
A B C⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥= = =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥− − −⎣ ⎦ ⎣ ⎦
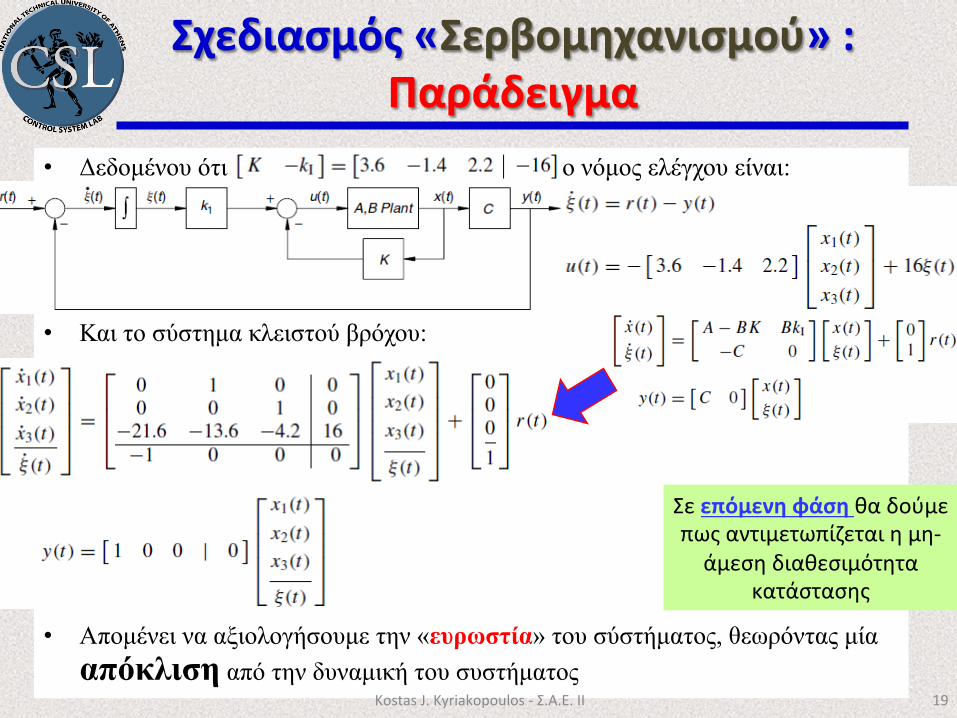
• Δεδοµένου ότι ο νόµος ελέγχου είναι:
• Και το σύστηµα κλειστού βρόχου:
• Αποµένει να αξιολογήσουµε την «ευρωστία» του σύστήµατος, θεωρόντας µία απόκλιση από την δυναµική του συστήµατος
Σχεδιασμός «Σερβομηχανισμού» : Παράδειγμα
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 19
Σε επόμενη φάση θα δούμε πως αντιμετωπίζεται η μη-‐άμεση διαθεσιμότητα
κατάστασης
Σχεδιασμός «Σερβομηχανισμού» : Παράδειγμα
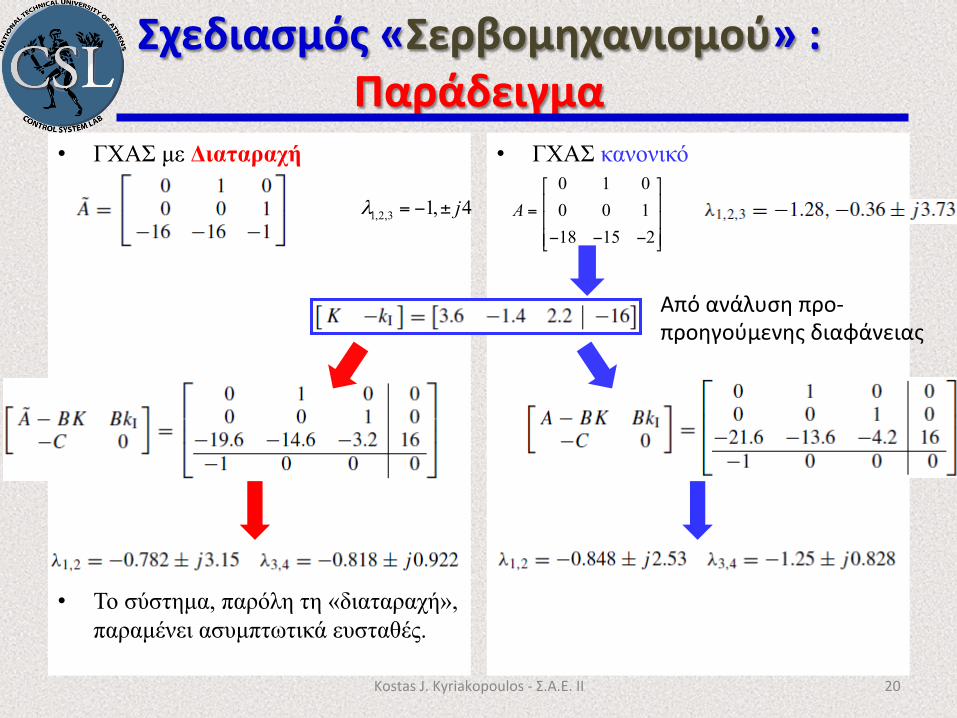
• ΓΧΑΣ µε Διαταραχή
• Το σύστηµα, παρόλη τη «διαταραχή», παραµένει ασυµπτωτικά ευσταθές.
• ΓΧΑΣ κανονικό
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 20
0 1 00 0 118 15 2
A⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥− − −⎣ ⎦
1,2,3 1, 4jλ = − ±
Από ανάλυση προ-‐προηγούμενης διαφάνειας
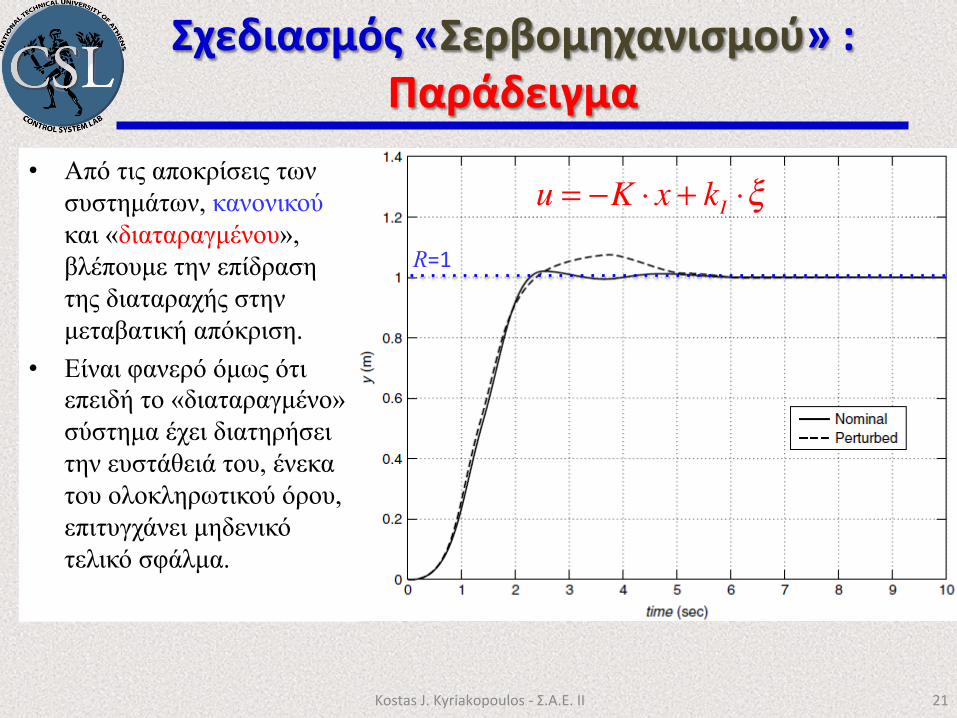
• Από τις αποκρίσεις των συστηµάτων, κανονικού και «διαταραγµένου», βλέπουµε την επίδραση της διαταραχής στην µεταβατική απόκριση.
• Είναι φανερό όµως ότι επειδή το «διαταραγµένο» σύστηµα έχει διατηρήσει την ευστάθειά του, ένεκα του ολοκληρωτικού όρου, επιτυγχάνει µηδενικό τελικό σφάλµα.
Σχεδιασμός «Σερβομηχανισμού» : Παράδειγμα
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 21
u = −K ⋅ x + kI ⋅ξ
R=1
7. Παρατηρητές και Ανάδραση Εξόδου
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 22
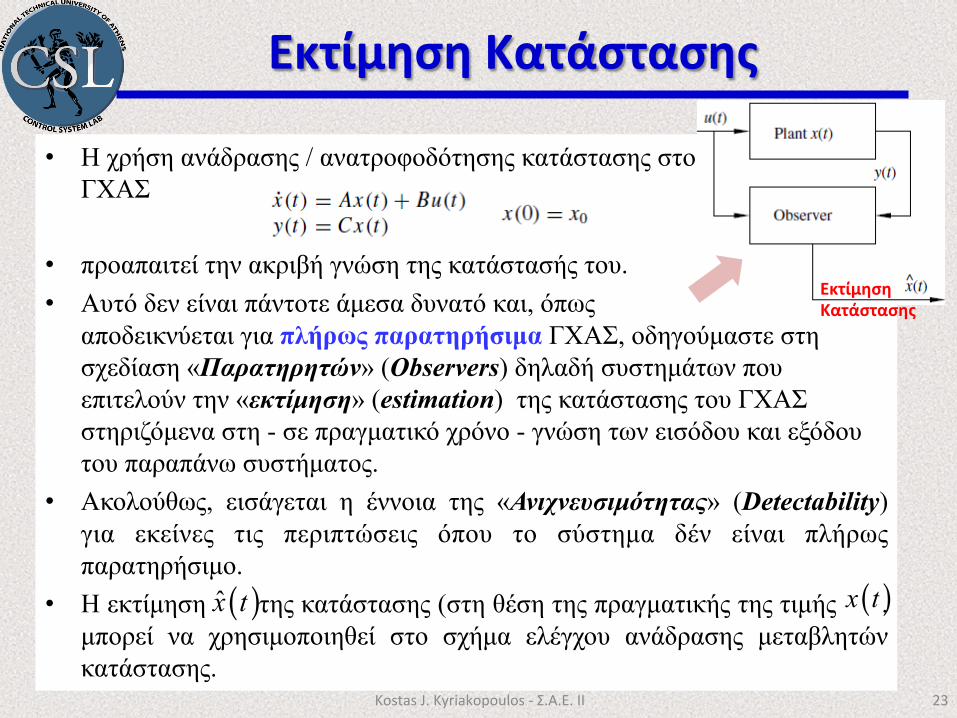
• Η χρήση ανάδρασης / ανατροφοδότησης κατάστασης στο ΓΧΑΣ
• προαπαιτεί την ακριβή γνώση της κατάστασής του. • Αυτό δεν είναι πάντοτε άµεσα δυνατό και, όπως αποδεικνύεται για πλήρως παρατηρήσιµα ΓΧΑΣ, οδηγούµαστε στη σχεδίαση «Παρατηρητών» (Observers) δηλαδή συστηµάτων που επιτελούν την «εκτίµηση» (estimation) της κατάστασης του ΓΧΑΣ στηριζόµενα στη - σε πραγµατικό χρόνο - γνώση των εισόδου και εξόδου του παραπάνω συστήµατος.
• Ακολούθως, εισάγεται η έννοια της «Ανιχνευσιµότητας» (Detectability) για εκείνες τις περιπτώσεις όπου το σύστηµα δέν είναι πλήρως παρατηρήσιµο.
• Η εκτίµηση της κατάστασης (στη θέση της πραγµατικής της τιµής . µπορεί να χρησιµοποιηθεί στο σχήµα ελέγχου ανάδρασης µεταβλητών κατάστασης.
Εκτίμηση Κατάστασης
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 23
Εκτίμηση Κατάστασης
( )x̂ t ( )x t
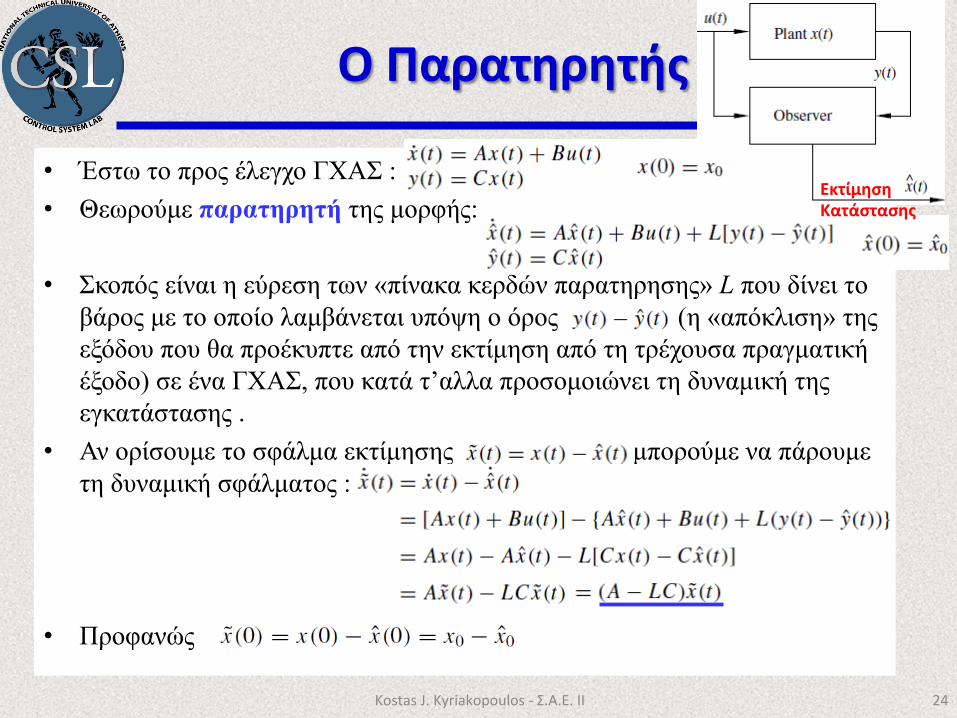
• Έστω το προς έλεγχο ΓΧΑΣ : • Θεωρούµε παρατηρητή της µορφής:
• Σκοπός είναι η εύρεση των «πίνακα κερδών παρατηρησης» L που δίνει το βάρος µε το οποίο λαµβάνεται υπόψη ο όρος (η «απόκλιση» της εξόδου που θα προέκυπτε από την εκτίµηση από τη τρέχουσα πραγµατική έξοδο) σε ένα ΓΧΑΣ, που κατά τ’αλλα προσοµοιώνει τη δυναµική της εγκατάστασης .
• Αν ορίσουµε το σφάλµα εκτίµησης µπορούµε να πάρουµε τη δυναµική σφάλµατος :
• Προφανώς
Ο Παρατηρητής
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 24
Εκτίμηση Κατάστασης
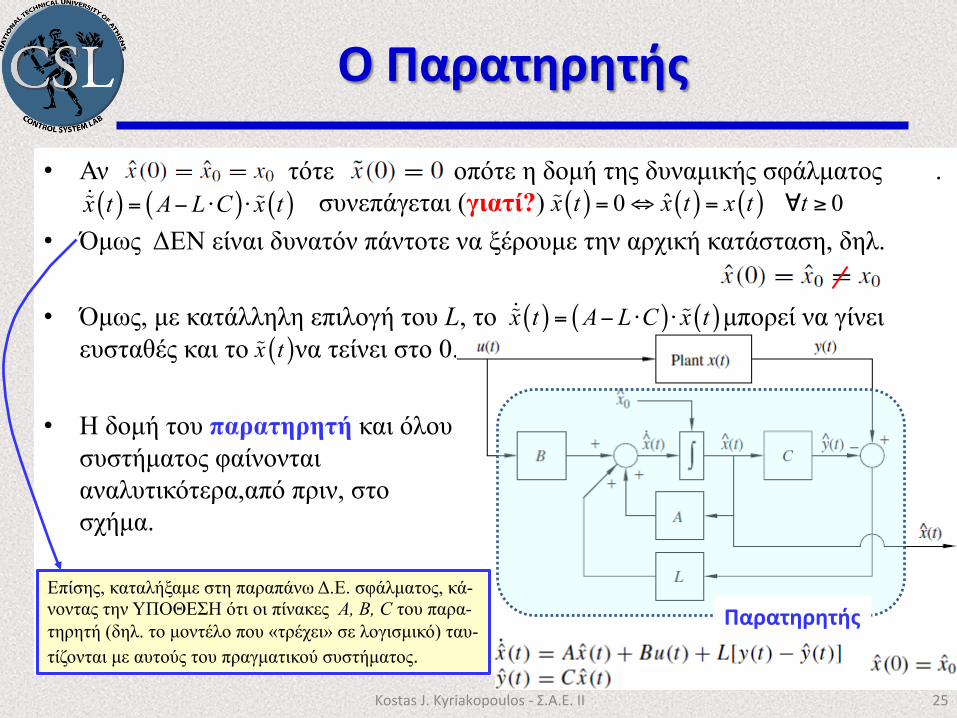
• Αν τότε οπότε η δοµή της δυναµικής σφάλµατος . … συνεπάγεται (γιατί?)
• Όµως ΔΕΝ είναι δυνατόν πάντοτε να ξέρουµε την αρχική κατάσταση, δηλ.
• Όµως, µε κατάλληλη επιλογή του L, το µπορεί να γίνει ευσταθές και το να τείνει στο 0.
• Η δοµή του παρατηρητή και όλου του συστήµατος φαίνονται αναλυτικότερα,από πριν, στο διπλανό σχήµα.
Ο Παρατηρητής
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 25
( ) ( ) ( )x t A L C x t= − ⋅ ⋅!" " ( ) ( ) ( )ˆ0 0x t x t x t t= ⇔ = ∀ ≥!
( ) ( ) ( )x t A L C x t= − ⋅ ⋅!" "( )x t!
Επίσης, καταλήξαµε στη παραπάνω Δ.Ε. σφάλµατος, κά-νοντας την ΥΠΟΘΕΣΗ ότι οι πίνακες Α, Β, C του παρα-τηρητή (δηλ. το µοντέλο που «τρέχει» σε λογισµικό) ταυ-τίζονται µε αυτούς του πραγµατικού συστήµατος.
Παρατηρητής
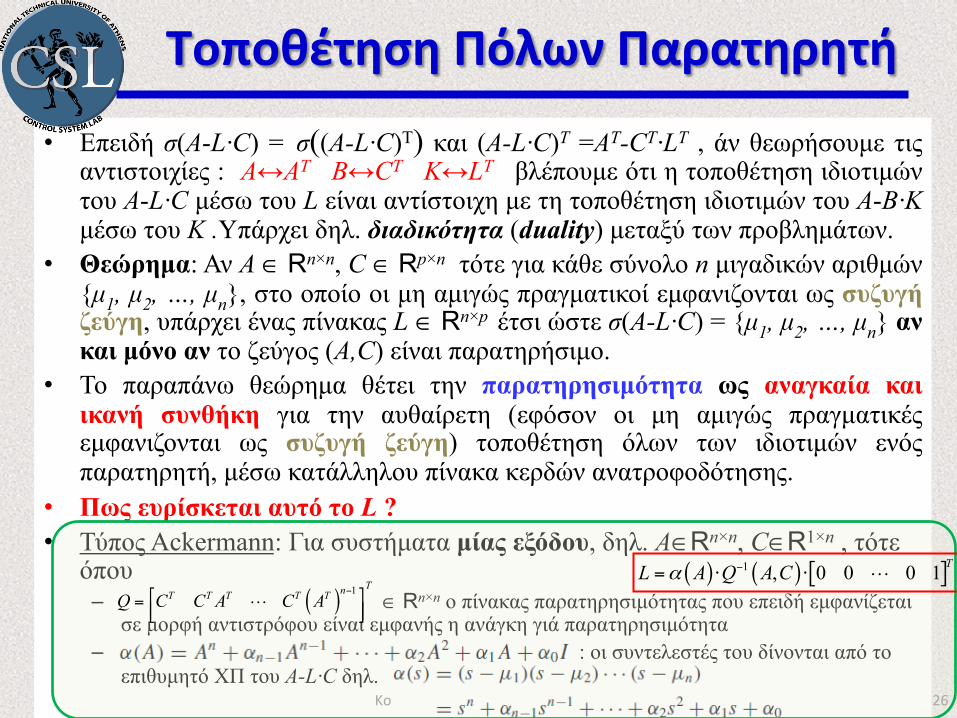
• Επειδή σ(Α-L·C) = σ((Α-L·C)Τ) και (Α-L·C)Τ =ΑΤ-CT·LT , άν θεωρήσουµε τις αντιστοιχίες : Α↔ΑΤ Β↔CΤ K↔LΤ βλέπουµε ότι η τοποθέτηση ιδιοτιµών του Α-L·C µέσω του L είναι αντίστοιχη µε τη τοποθέτηση ιδιοτιµών του Α-Β·Κ µέσω του Κ .Υπάρχει δηλ. διαδικότητα (duality) µεταξύ των προβληµάτων.
• Θεώρηµα: Αν Α ∈ Rn×n, C ∈ Rp×n τότε για κάθε σύνολο n µιγαδικών αριθµών {µ1, µ2, …, µn}, στο οποίο οι µη αµιγώς πραγµατικοί εµφανιζονται ως συζυγή ζεύγη, υπάρχει ένας πίνακας L ∈ Rn×p έτσι ώστε σ(Α-L·C) = {µ1, µ2, …, µn} αν και µόνο αν το ζεύγος (Α,C) είναι παρατηρήσιµο.
• Το παραπάνω θεώρηµα θέτει την παρατηρησιµότητα ως αναγκαία και ικανή συνθήκη για την αυθαίρετη (εφόσον οι µη αµιγώς πραγµατικές εµφανιζονται ως συζυγή ζεύγη) τοποθέτηση όλων των ιδιοτιµών ενός παρατηρητή, µέσω κατάλληλου πίνακα κερδών ανατροφοδότησης.
• Πως ευρίσκεται αυτό το L ? • Τύπος Ackermann: Για συστήµατα µίας εξόδου, δηλ. Α∈Rn×n, C∈R1×n , τότε όπου – ∈ Rn×n ο πίνακας παρατηρησιµότητας που επειδή εµφανίζεται σε µορφή αντιστρόφου είναι εµφανής η ανάγκη γιά παρατηρησιµότητα
– : οι συντελεστές του δίνονται από το επιθυµητό ΧΠ του Α-L·C δηλ.
Τοποθέτηση Πόλων Παρατηρητή
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 26
( ) ( ) [ ]1 , 0 0 0 1 TL A Q A Cα −= ⋅ ⋅ !
( ) 1 TnT T T T TQ C C A C A−⎡ ⎤= ⎢ ⎥⎣ ⎦
!
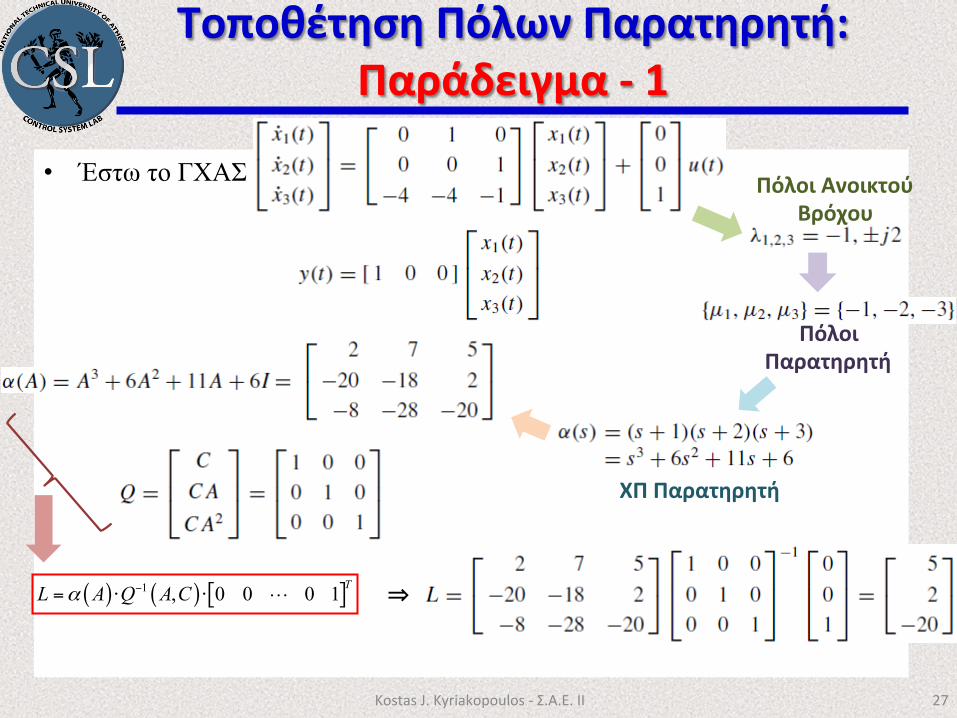
• Έστω το ΓΧΑΣ
Τοποθέτηση Πόλων Παρατηρητή: Παράδειγμα -‐ 1
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 27
Πόλοι Ανοικτού Βρόχου
Πόλοι Παρατηρητή
ΧΠ Παρατηρητή
( ) ( ) [ ]1 , 0 0 0 1 TL A Q A Cα −= ⋅ ⋅ ! ⇒
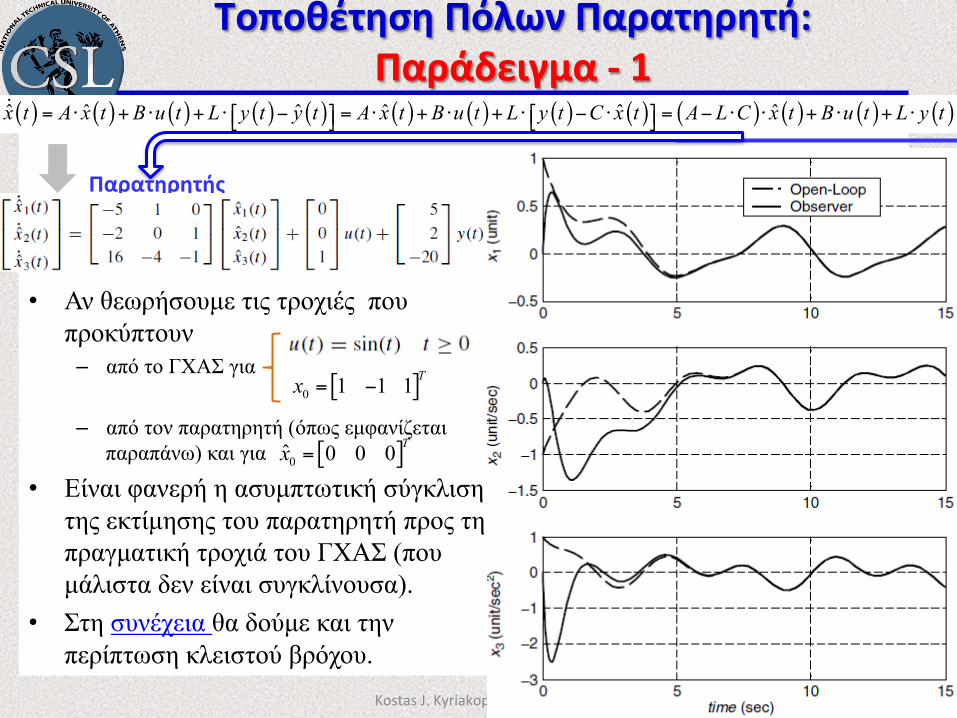
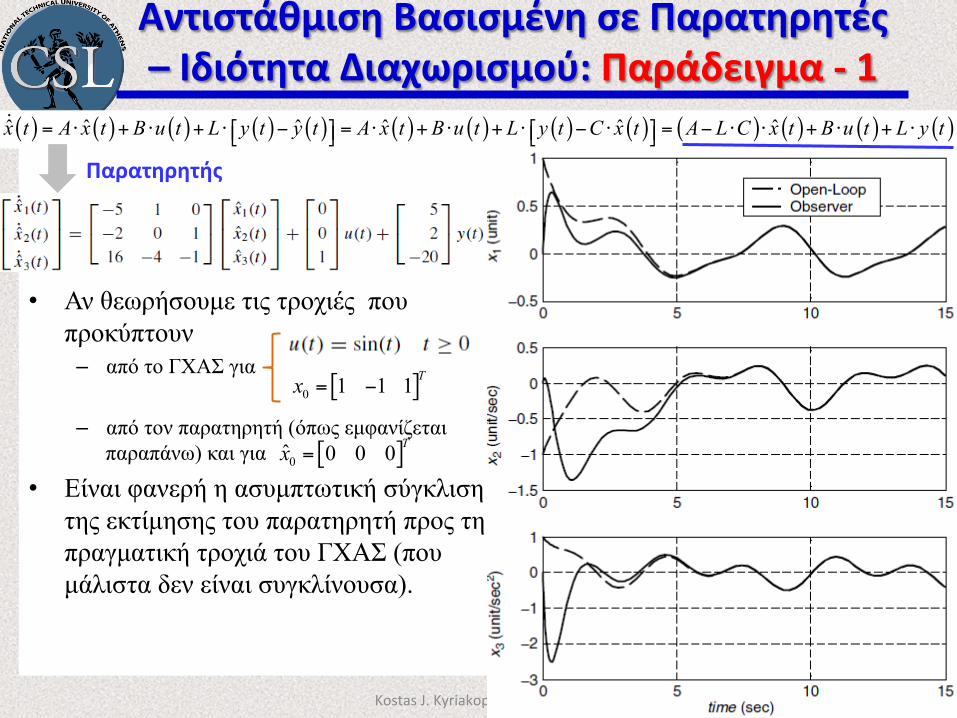
• Αν θεωρήσουµε τις τροχιές που προκύπτουν – από το ΓΧΑΣ για
– από τον παρατηρητή (όπως εµφανίζεται παραπάνω) και για
• Είναι φανερή η ασυµπτωτική σύγκλιση της εκτίµησης του παρατηρητή προς τη πραγµατική τροχιά του ΓΧΑΣ (που µάλιστα δεν είναι συγκλίνουσα).
• Στη συνέχεια θα δούµε και την περίπτωση κλειστού βρόχου.
Τοποθέτηση Πόλων Παρατηρητή: Παράδειγμα -‐ 1
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 28
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )ˆ ˆ ˆ ˆ ˆ ˆx t A x t B u t L y t y t A x t B u t L y t C x t A L C x t B u t L y t= ⋅ + ⋅ + ⋅ − = ⋅ + ⋅ + ⋅ − ⋅ = − ⋅ ⋅ + ⋅ + ⋅⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦!
Παρατηρητής
[ ]0 1 1 1 Tx = −
[ ]0ˆ 0 0 0 Tx =
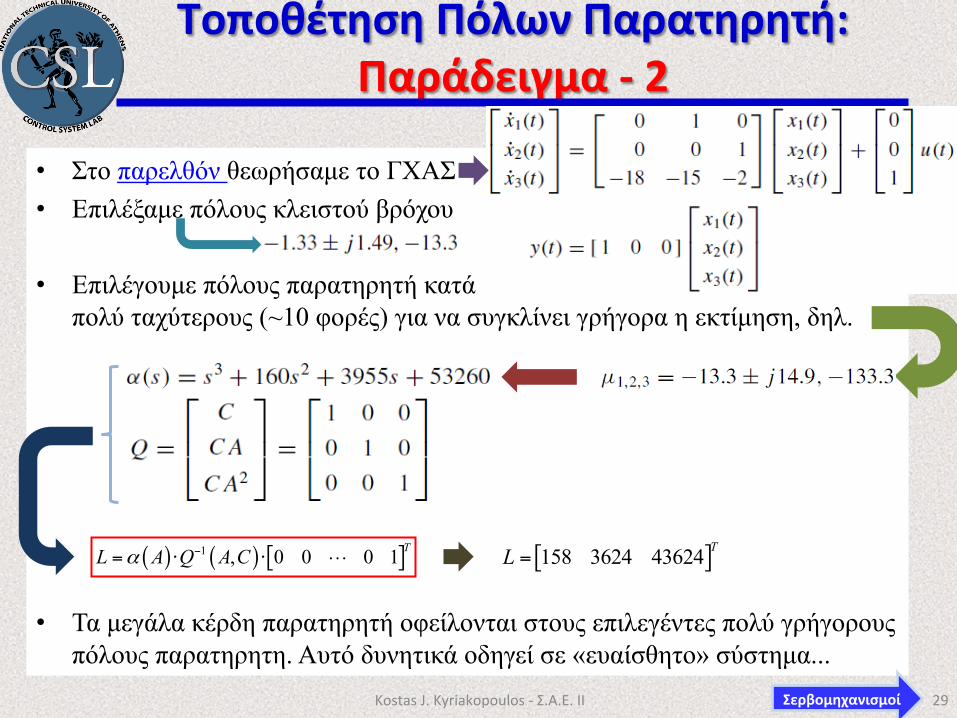
• Στο παρελθόν θεωρήσαµε το ΓΧΑΣ • Επιλέξαµε πόλους κλειστού βρόχου
• Επιλέγουµε πόλους παρατηρητή κατά πολύ ταχύτερους (~10 φορές) για να συγκλίνει γρήγορα η εκτίµηση, δηλ.
• Τα µεγάλα κέρδη παρατηρητή οφείλονται στους επιλεγέντες πολύ γρήγορους πόλους παρατηρητη. Αυτό δυνητικά οδηγεί σε «ευαίσθητο» σύστηµα...
Τοποθέτηση Πόλων Παρατηρητή: Παράδειγμα -‐ 2
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 29
( ) ( ) [ ]1 , 0 0 0 1 TL A Q A Cα −= ⋅ ⋅ ! [ ]158 3624 43624 TL =
Σερβομηχανισμοί
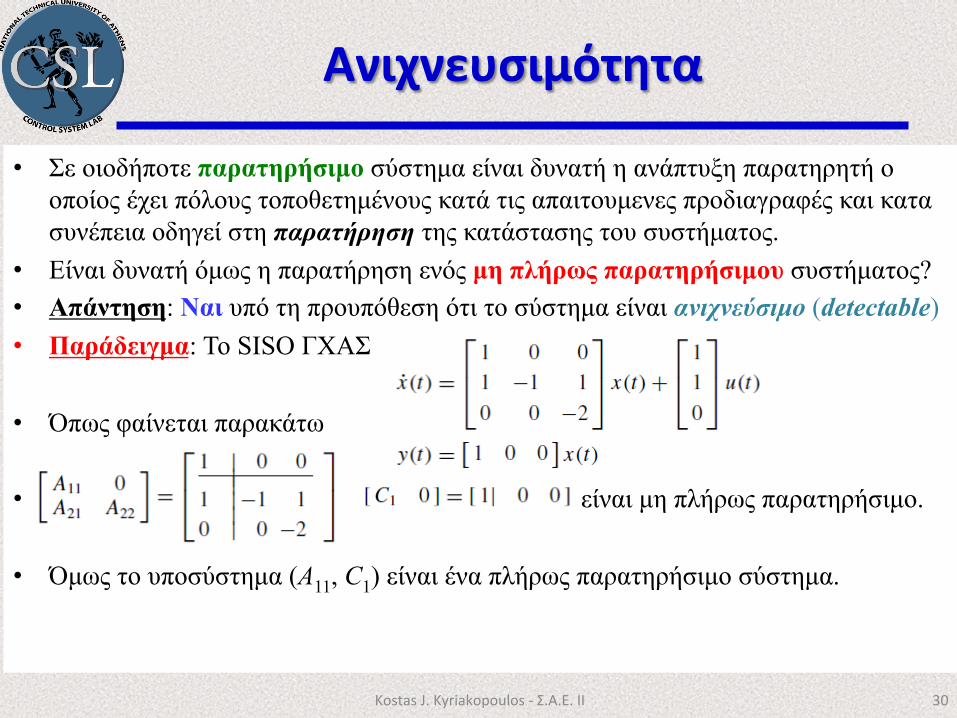
• Σε οιοδήποτε παρατηρήσιµο σύστηµα είναι δυνατή η ανάπτυξη παρατηρητή ο οποίος έχει πόλους τοποθετηµένους κατά τις απαιτουµενες προδιαγραφές και κατα συνέπεια οδηγεί στη παρατήρηση της κατάστασης του συστήµατος.
• Είναι δυνατή όµως η παρατήρηση ενός µη πλήρως παρατηρήσιµου συστήµατος? • Απάντηση: Ναι υπό τη προυπόθεση ότι το σύστηµα είναι ανιχνεύσιµο (detectable) • Παράδειγµα: Το SISO ΓΧΑΣ
• Όπως φαίνεται παρακάτω
• είναι µη πλήρως παρατηρήσιµο.
• Όµως το υποσύστηµα (Α11, C1) είναι ένα πλήρως παρατηρήσιµο σύστηµα.
Ανιχνευσιμότητα
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 30
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ
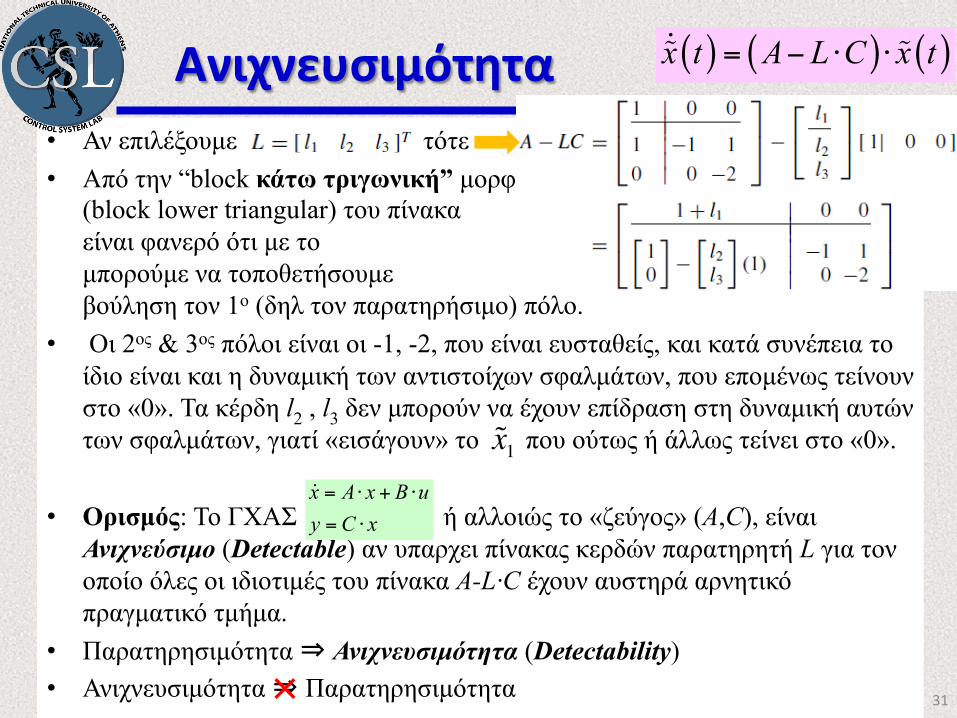
• Αν επιλέξουµε τότε • Από την “block κάτω τριγωνική” µορφή
(block lower triangular) του πίνακα παρατηρητή είναι φανερό ότι µε το κέρδος l1 µπορούµε να τοποθετήσουµε κατά βούληση τον 1ο (δηλ τον παρατηρήσιµο) πόλο.
• Oι 2ος & 3ος πόλοι είναι οι -1, -2, που είναι ευσταθείς, και κατά συνέπεια το ίδιο είναι και η δυναµική των αντιστοίχων σφαλµάτων, που εποµένως τείνουν στο «0». Τα κέρδη l2 , l3 δεν µπορούν να έχουν επίδραση στη δυναµική αυτών των σφαλµάτων, γιατί «εισάγουν» το που ούτως ή άλλως τείνει στο «0».
• Ορισµός: Το ΓΧΑΣ ή αλλοιώς το «ζεύγος» (Α,C), είναι Ανιχνεύσιµο (Detectable) αν υπαρχει πίνακας κερδών παρατηρητή L για τον οποίο όλες οι ιδιοτιµές του πίνακα Α-L·C έχουν αυστηρά αρνητικό πραγµατικό τµήµα.
• Παρατηρησιµότητα ⇒ Ανιχνευσιµότητα (Detectability) • Ανιχνευσιµότητα ⇒ Παρατηρησιµότητα
Ανιχνευσιμότητα
31 ×
x A x B uy C x= ⋅ + ⋅
= ⋅
!
( ) ( ) ( )x t A L C x t= − ⋅ ⋅!" "
!x1
Ανιχνευσιμότητα
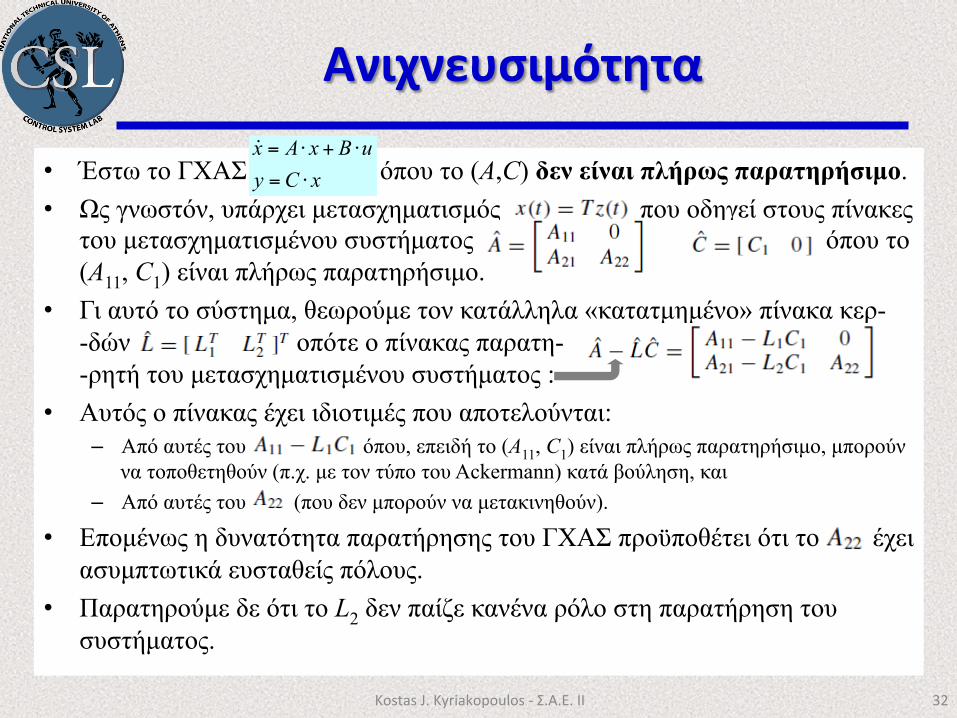
• Έστω το ΓΧΑΣ όπου το (Α,C) δεν είναι πλήρως παρατηρήσιµο. • Ως γνωστόν, υπάρχει µετασχηµατισµός που οδηγεί στους πίνακες του µετασχηµατισµένου συστήµατος όπου το (Α11, C1) είναι πλήρως παρατηρήσιµο.
• Γι αυτό το σύστηµα, θεωρούµε τον κατάλληλα «κατατµηµένο» πίνακα κερ- -δών οπότε ο πίνακας παρατη- -ρητή του µετασχηµατισµένου συστήµατος :
• Αυτός ο πίνακας έχει ιδιοτιµές που αποτελούνται: – Από αυτές του όπου, επειδή το (Α11, C1) είναι πλήρως παρατηρήσιµο, µπορούν να τοποθετηθούν (π.χ. µε τον τύπο του Ackermann) κατά βούληση, και
– Από αυτές του (που δεν µπορούν να µετακινηθούν).
• Εποµένως η δυνατότητα παρατήρησης του ΓΧΑΣ προϋποθέτει ότι το έχει ασυµπτωτικά ευσταθείς πόλους.
• Παρατηρούµε δε ότι το L2 δεν παίζε κανένα ρόλο στη παρατήρηση του συστήµατος.
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 32
x A x B uy C x= ⋅ + ⋅
= ⋅
!
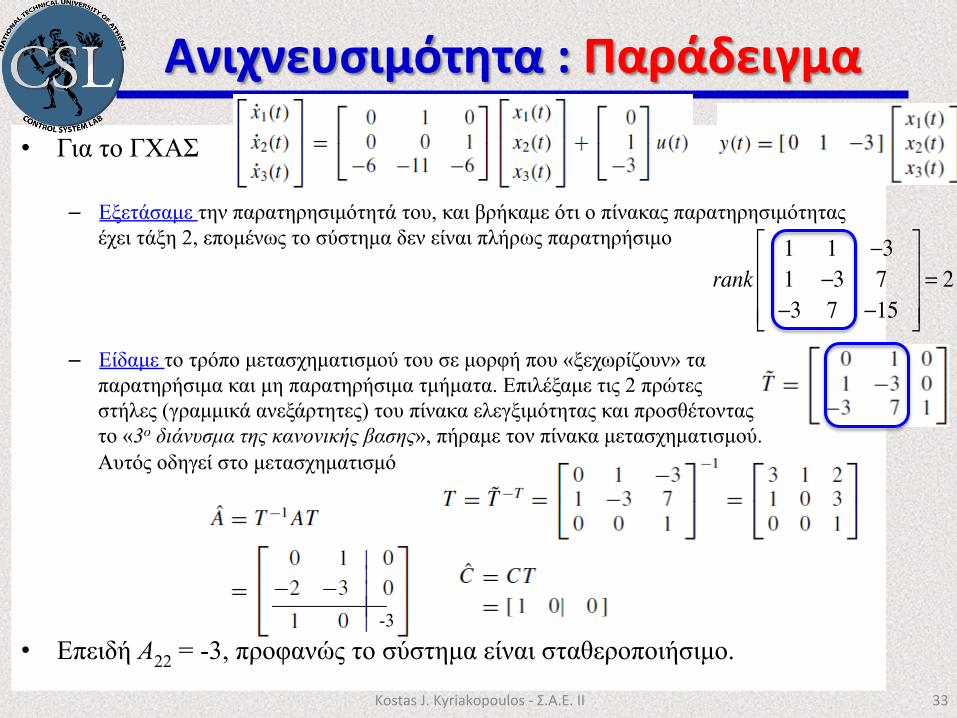
• Για το ΓΧΑΣ
– Εξετάσαµε την παρατηρησιµότητά του, και βρήκαµε ότι o πίνακας παρατηρησιµότητας έχει τάξη 2, εποµένως το σύστηµα δεν είναι πλήρως παρατηρήσιµο
– Είδαµε το τρόπο µετασχηµατισµού του σε µορφή που «ξεχωρίζουν» τα . παρατηρήσιµα και µη παρατηρήσιµα τµήµατα. Επιλέξαµε τις 2 πρώτες . στήλες (γραµµικά ανεξάρτητες) του πίνακα ελεγξιµότητας και προσθέτοντας . το «3ο διάνυσµα της κανονικής βασης», πήραµε τον πίνακα µετασχηµατισµού. Αυτός οδηγεί στο µετασχηµατισµό
• Επειδή Α22 = -3, προφανώς το σύστηµα είναι σταθεροποιήσιµο.
Ανιχνευσιμότητα : Παράδειγμα
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 33
rank1 1 −31 −3 7−3 7 −15
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥= 2
-3
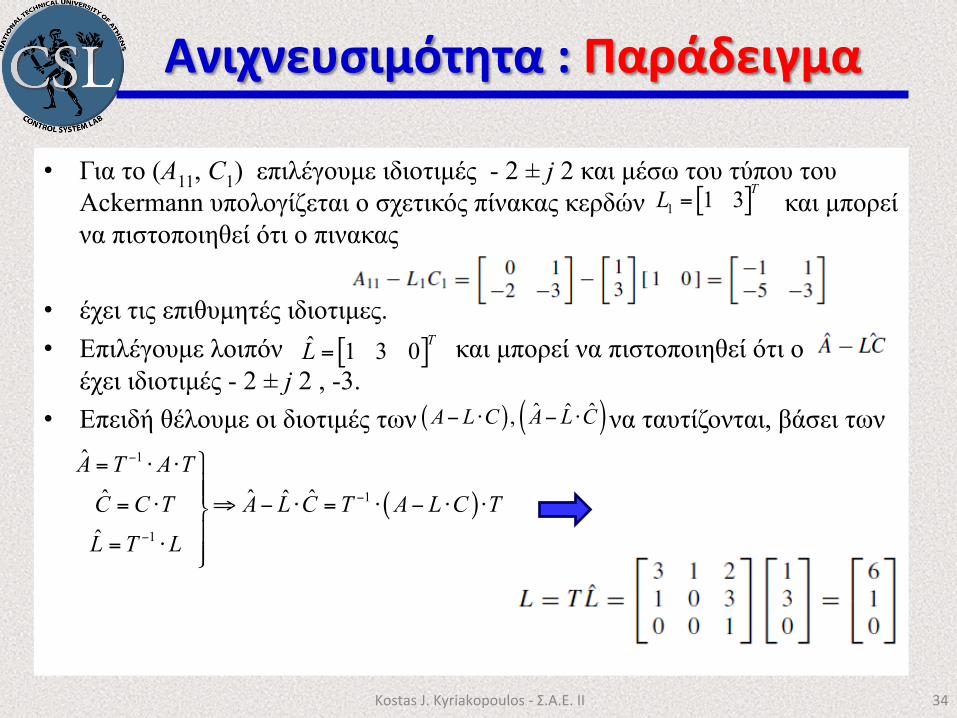
• Για το (Α11, C1) επιλέγουµε ιδιοτιµές - 2 ± j 2 και µέσω του τύπου του Ackermann υπολογίζεται ο σχετικός πίνακας κερδών και µπορεί να πιστοποιηθεί ότι ο πινακας
• έχει τις επιθυµητές ιδιοτιµές. • Επιλέγουµε λοιπόν και µπορεί να πιστοποιηθεί ότι ο έχει ιδιοτιµές - 2 ± j 2 , -3.
• Επειδή θέλουµε οι διοτιµές των να ταυτίζονται, βάσει των
Ανιχνευσιμότητα : Παράδειγμα
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 34
[ ]1 1 3 TL =
[ ]ˆ 1 3 0 TL =
( ) ( )ˆ ˆˆ,A L C A L C− ⋅ − ⋅
( )
1
1
1
ˆ
ˆ ˆ ˆˆ
ˆ
A T A T
C C T A L C T A L C T
L T L
−
−
−
⎫= ⋅ ⋅⎪⎪
= ⋅ ⇒ − ⋅ = ⋅ − ⋅ ⋅⎬⎪
= ⋅ ⎪⎭
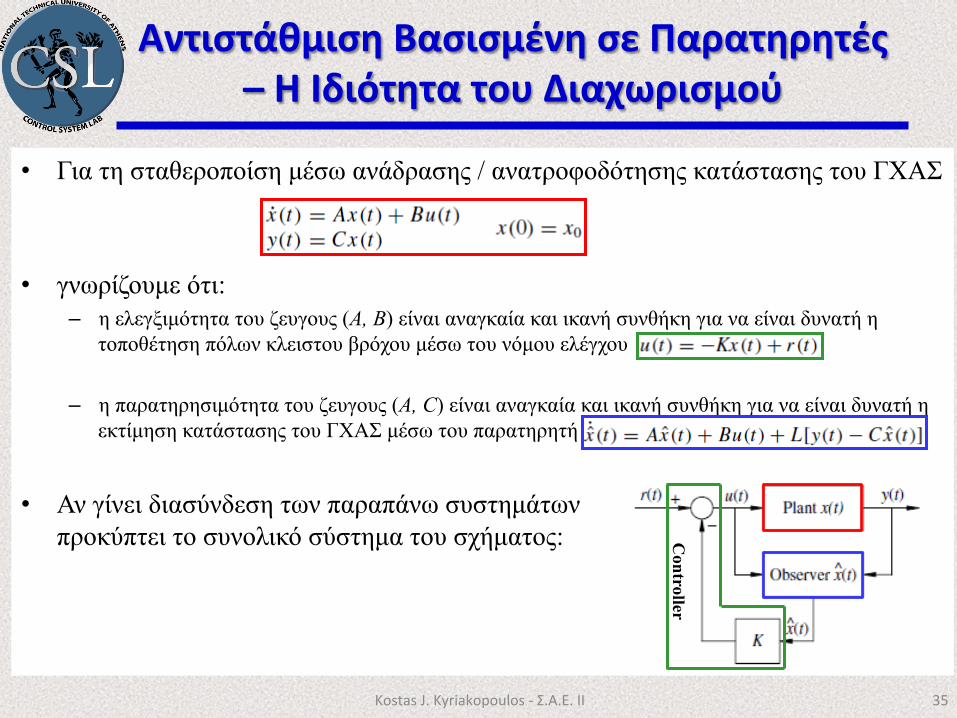
• Για τη σταθεροποίση µέσω ανάδρασης / ανατροφοδότησης κατάστασης του ΓΧΑΣ
• γνωρίζουµε ότι: – η ελεγξιµότητα του ζευγους (Α, Β) είναι αναγκαία και ικανή συνθήκη για να είναι δυνατή η τοποθέτηση πόλων κλειστου βρόχου µέσω του νόµου ελέγχου
– η παρατηρησιµότητα του ζευγους (Α, C) είναι αναγκαία και ικανή συνθήκη για να είναι δυνατή η εκτίµηση κατάστασης του ΓΧΑΣ µέσω του παρατηρητή
• Αν γίνει διασύνδεση των παραπάνω συστηµάτων προκύπτει το συνολικό σύστηµα του σχήµατος:
Αντιστάθμιση Βασισμένη σε Παρατηρητές – Η Ιδιότητα του Διαχωρισμού
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 35
Controller
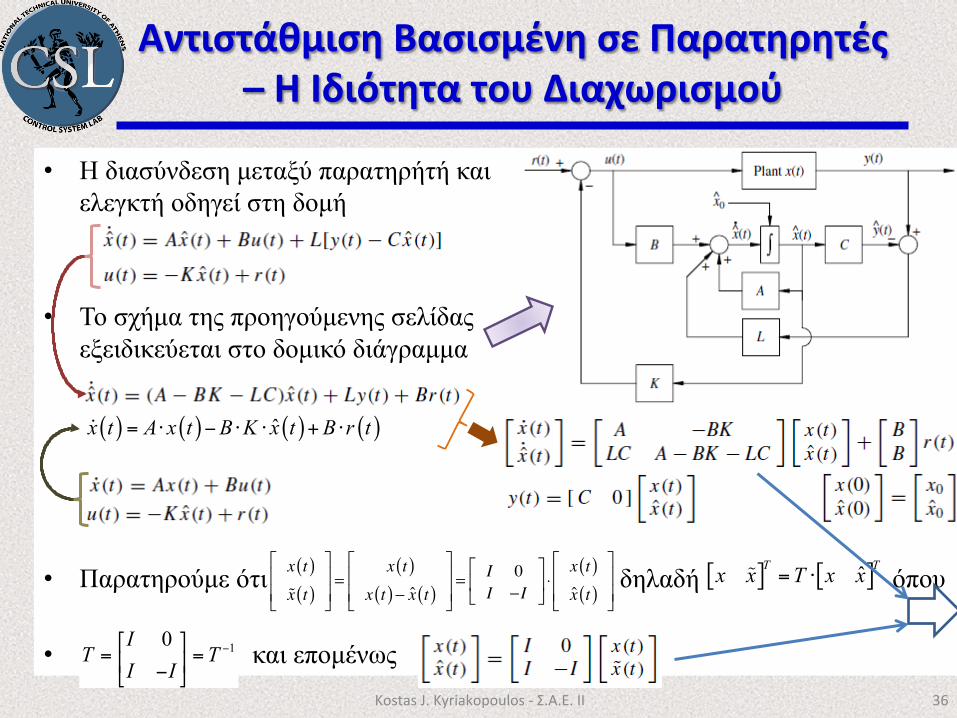
• Η διασύνδεση µεταξύ παρατηρήτή και ελεγκτή οδηγεί στη δοµή
• Το σχήµα της προηγούµενης σελίδας εξειδικεύεται στο δοµικό διάγραµµα
• Παρατηρούµε ότι δηλαδή όπου
• και εποµένως
Αντιστάθμιση Βασισμένη σε Παρατηρητές – Η Ιδιότητα του Διαχωρισμού
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 36
( ) ( ) ( ) ( )ˆx t A x t B K x t B r t= ⋅ − ⋅ ⋅ + ⋅!
[ ] [ ]ˆT Tx x T x x= ⋅!
10IT T
I I−⎡ ⎤
= =⎢ ⎥−⎣ ⎦
x t( )!x t( )
⎡
⎣⎢⎢
⎤
⎦⎥⎥=
x t( )x t( )− x̂ t( )
⎡
⎣⎢⎢
⎤
⎦⎥⎥= I 0
I −I⎡
⎣⎢
⎤
⎦⎥ ⋅
x t( )x̂ t( )
⎡
⎣⎢⎢
⎤
⎦⎥⎥
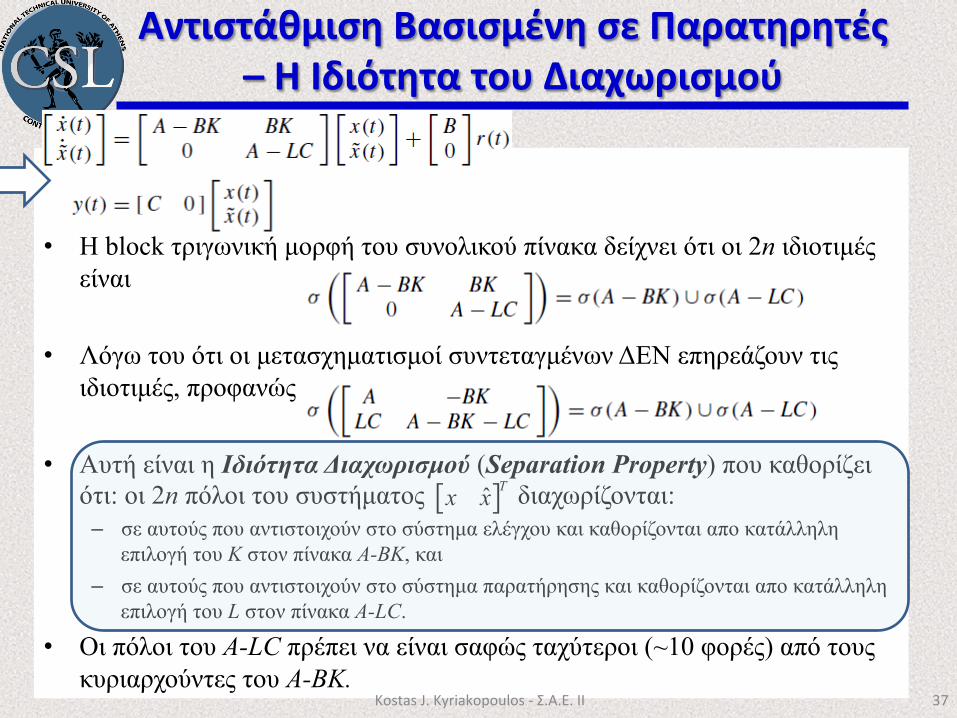
• H block τριγωνική µορφή του συνολικού πίνακα δείχνει ότι οι 2n ιδιοτιµές είναι
• Λόγω του ότι οι µετασχηµατισµοί συντεταγµένων ΔΕΝ επηρεάζουν τις ιδιοτιµές, προφανώς
• Αυτή είναι η Ιδιότητα Διαχωρισµού (Separation Property) που καθορίζει ότι: οι 2n πόλοι του συστήµατος διαχωρίζονται: – σε αυτούς που αντιστοιχούν στο σύστηµα ελέγχου και καθορίζονται απο κατάλληλη επιλογή του K στον πίνακα Α-ΒΚ, και
– σε αυτούς που αντιστοιχούν στο σύστηµα παρατήρησης και καθορίζονται απο κατάλληλη επιλογή του L στον πίνακα Α-LC.
• Οι πόλοι του Α-LC πρέπει να είναι σαφώς ταχύτεροι (~10 φορές) από τους κυριαρχούντες του Α-ΒΚ.
Αντιστάθμιση Βασισμένη σε Παρατηρητές – Η Ιδιότητα του Διαχωρισμού
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 37
[ ]ˆ Tx x
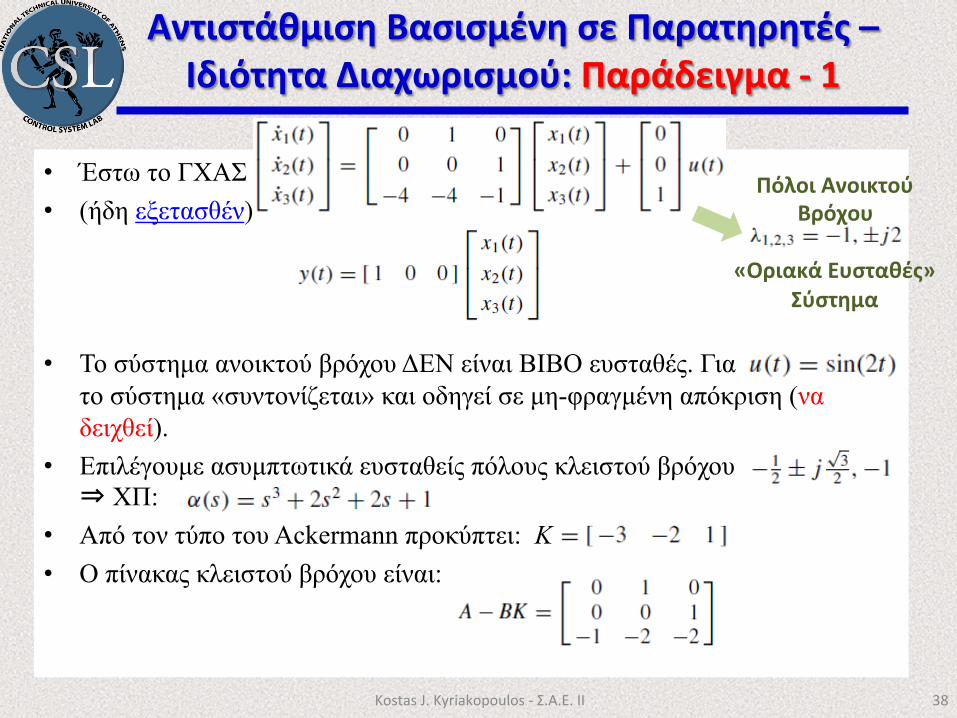
• Έστω το ΓΧΑΣ • (ήδη εξετασθέν)
• Το σύστηµα ανοικτού βρόχου ΔΕΝ είναι ΒΙΒΟ ευσταθές. Για το σύστηµα «συντονίζεται» και οδηγεί σε µη-φραγµένη απόκριση (να δειχθεί).
• Επιλέγουµε ασυµπτωτικά ευσταθείς πόλους κλειστού βρόχου . ⇒ ΧΠ:
• Από τον τύπο του Ackermann προκύπτει: Κ • Ο πίνακας κλειστού βρόχου είναι:
Αντιστάθμιση Βασισμένη σε Παρατηρητές – Ιδιότητα Διαχωρισμού: Παράδειγμα -‐ 1
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 38
Πόλοι Ανοικτού Βρόχου
«Οριακά Ευσταθές»
Σύστημα
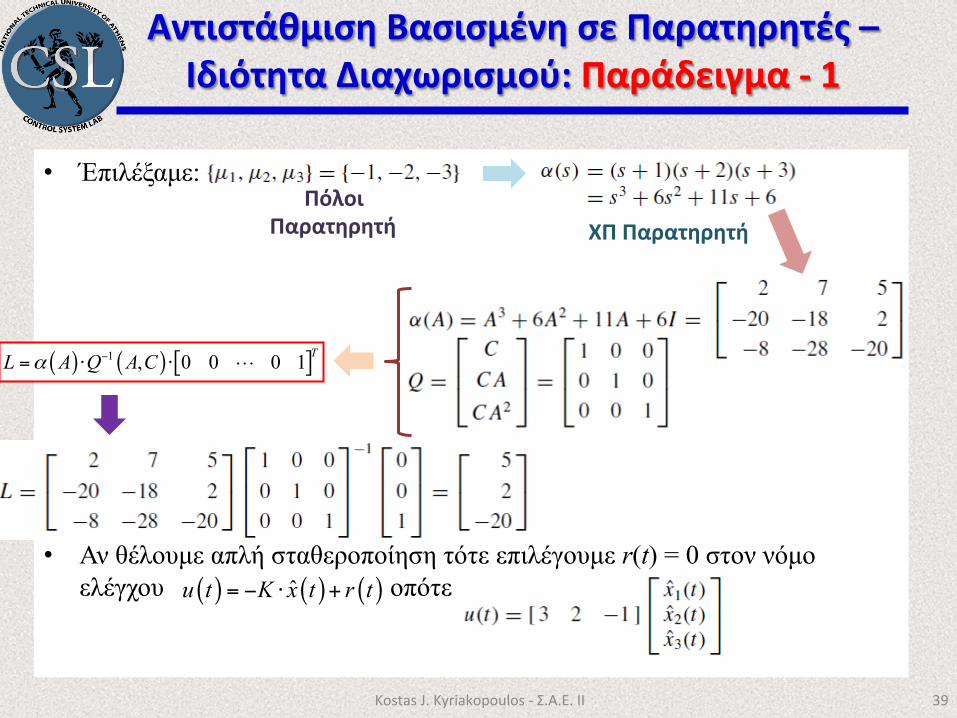
• Έπιλέξαµε:
• Αν θέλουµε απλή σταθεροποίηση τότε επιλέγουµε r(t) = 0 στον νόµο ελέγχου οπότε
Αντιστάθμιση Βασισμένη σε Παρατηρητές – Ιδιότητα Διαχωρισμού: Παράδειγμα -‐ 1
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 39
Πόλοι Παρατηρητή ΧΠ Παρατηρητή
( ) ( ) [ ]1 , 0 0 0 1 TL A Q A Cα −= ⋅ ⋅ !
( ) ( ) ( )ˆu t K x t r t= − ⋅ +
• Αν θεωρήσουµε τις τροχιές που προκύπτουν – από το ΓΧΑΣ για
– από τον παρατηρητή (όπως εµφανίζεται παραπάνω) και για
• Είναι φανερή η ασυµπτωτική σύγκλιση της εκτίµησης του παρατηρητή προς τη πραγµατική τροχιά του ΓΧΑΣ (που µάλιστα δεν είναι συγκλίνουσα).
Αντιστάθμιση Βασισμένη σε Παρατηρητές – Ιδιότητα Διαχωρισμού: Παράδειγμα -‐ 1
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 40
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )ˆ ˆ ˆ ˆ ˆ ˆx t A x t B u t L y t y t A x t B u t L y t C x t A L C x t B u t L y t= ⋅ + ⋅ + ⋅ − = ⋅ + ⋅ + ⋅ − ⋅ = − ⋅ ⋅ + ⋅ + ⋅⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦!
Παρατηρητής
[ ]0 1 1 1 Tx = −
[ ]0ˆ 0 0 0 Tx =
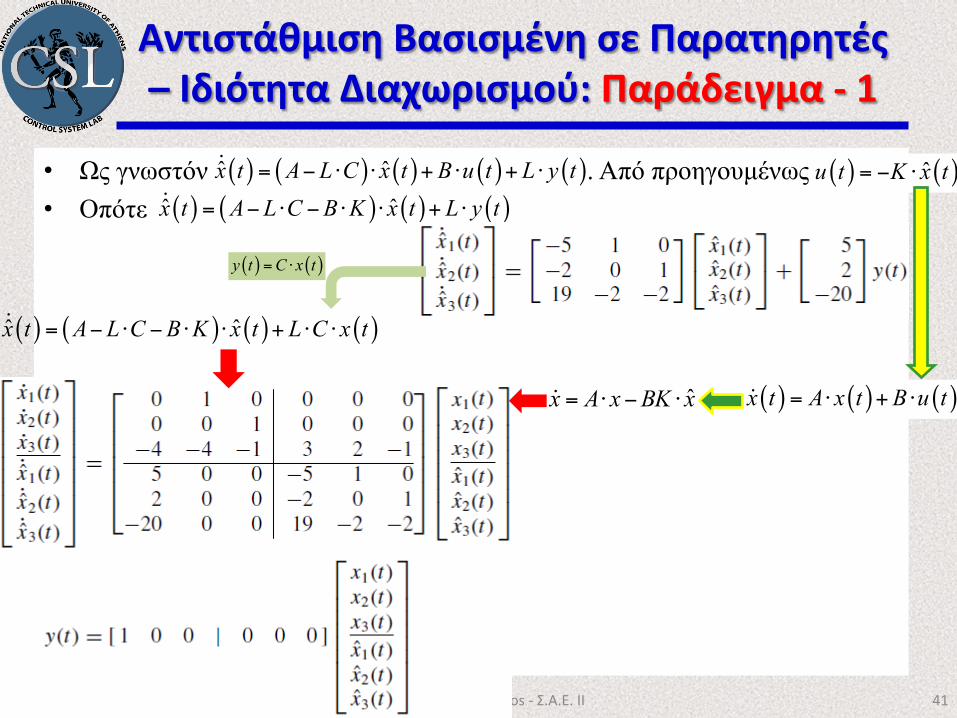
• Ως γνωστόν . Από προηγουµένως • Οπότε
Αντιστάθμιση Βασισμένη σε Παρατηρητές – Ιδιότητα Διαχωρισμού: Παράδειγμα -‐ 1
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 41
( ) ( ) ( ) ( ) ( )ˆ ˆx t A L C x t B u t L y t= − ⋅ ⋅ + ⋅ + ⋅! ( ) ( )ˆu t K x t= − ⋅
( ) ( ) ( ) ( )ˆ ˆx t A L C B K x t L y t= − ⋅ − ⋅ ⋅ + ⋅!
( ) ( ) ( ) ( )ˆ ˆx t A L C B K x t L C x t= − ⋅ − ⋅ ⋅ + ⋅ ⋅!
( ) ( )y t C x t= ⋅
( ) ( ) ( )x t A x t B u t= ⋅ + ⋅!ˆx A x BK x= ⋅ − ⋅!
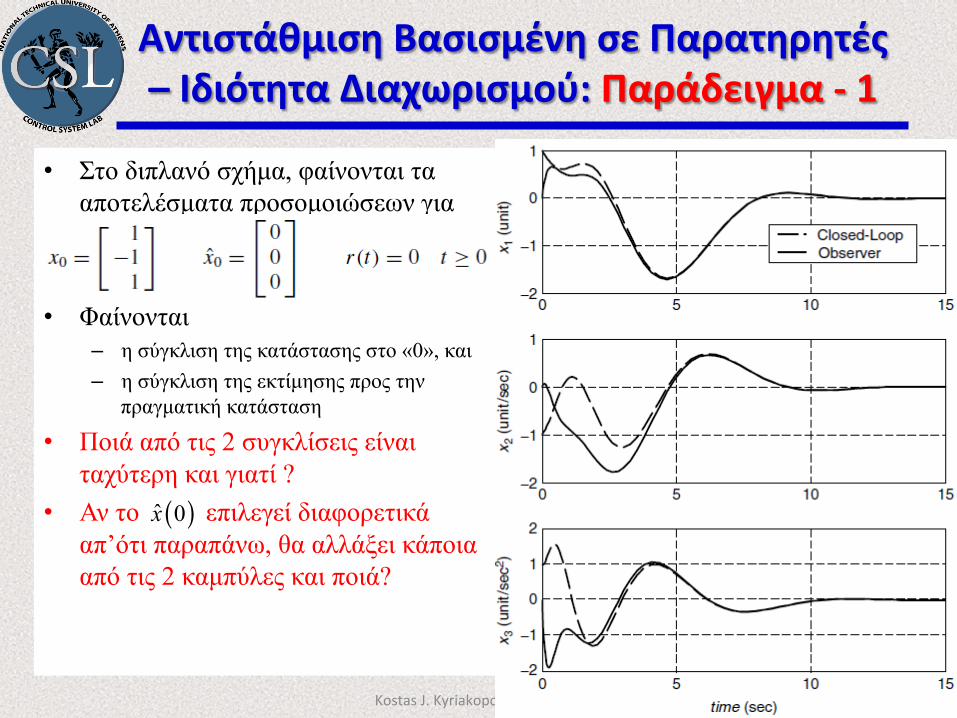
• Στο διπλανό σχήµα, φαίνονται τα αποτελέσµατα προσοµοιώσεων για
• Φαίνονται – η σύγκλιση της κατάστασης στο «0», και – η σύγκλιση της εκτίµησης προς την πραγµατική κατάσταση
• Ποιά από τις 2 συγκλίσεις είναι ταχύτερη και γιατί ?
• Αν το επιλεγεί διαφορετικά απ’ότι παραπάνω, θα αλλάξει κάποια από τις 2 καµπύλες και ποιά?
Αντιστάθμιση Βασισμένη σε Παρατηρητές – Ιδιότητα Διαχωρισμού: Παράδειγμα -‐ 1
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 42
( )ˆ 0x
• Μέχρι στιγµής δόθηκε έµφαση ση µεταβατική απόκριση. • Τώρα θα ασχοληθούµε µε τη παρακολούθηση εισόδου βαθµίδας µέσω δύο
(2) προσεγγίσεων: – Ενσωµάτωση της εισόδου αναφοράς στο νόµο ελέγχου µε ανατροφοδότηση κατάστασης.
– Σερβοµηχανισµοί: Ενσωµάτωση ολοκληρωτικού παράγοντα του σφάλµατος στο νόµο ελέγχου µε ανατροφοδότηση κατάστασης.
Παρακολούθηση Εισόδου Βαθμίδας: Αντιστάθμιση μέσω Παρατηρητή
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 43
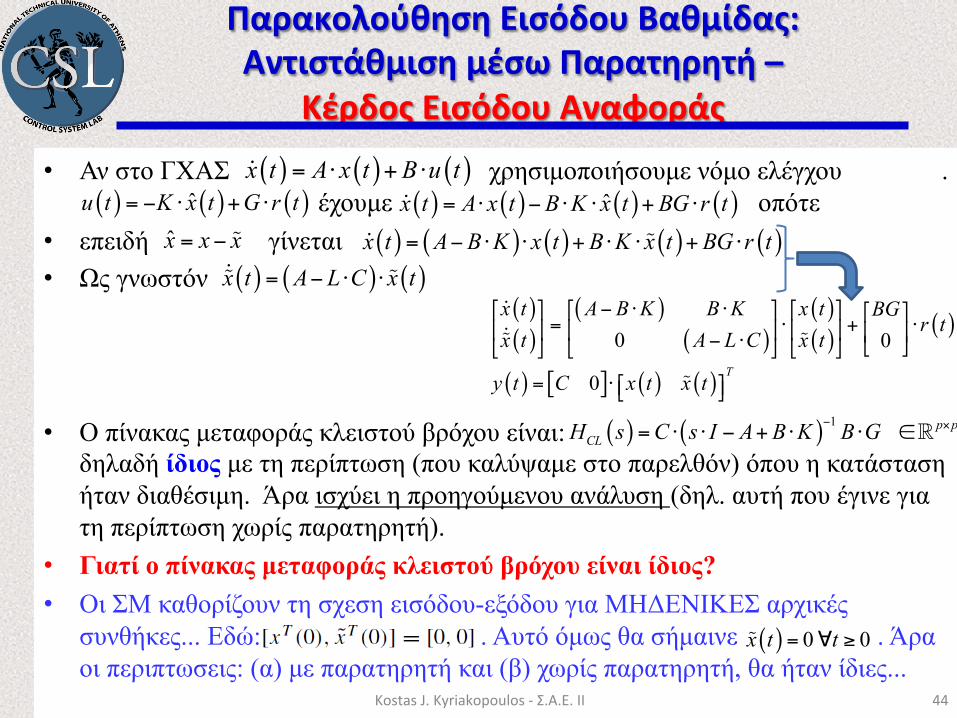
• Αν στο ΓΧΑΣ χρησιµοποιήσουµε νόµο ελέγχου . τότε έχουµε οπότε
• επειδή γίνεται • Ως γνωστόν
• Ο πίνακας µεταφοράς κλειστού βρόχου είναι: δηλαδή ίδιος µε τη περίπτωση (που καλύψαµε στο παρελθόν) όπου η κατάσταση ήταν διαθέσιµη. Άρα ισχύει η προηγούµενου ανάλυση (δηλ. αυτή που έγινε για τη περίπτωση χωρίς παρατηρητή).
• Γιατί ο πίνακας µεταφοράς κλειστού βρόχου είναι ίδιος? • Οι ΣΜ καθορίζουν τη σχεση εισόδου-εξόδου για ΜΗΔΕΝΙΚΕΣ αρχικές συνθήκες... Εδώ: . Αυτό όµως θα σήµαινε . Άρα οι περιπτωσεις: (α) µε παρατηρητή και (β) χωρίς παρατηρητή, θα ήταν ίδιες...
Παρακολούθηση Εισόδου Βαθμίδας: Αντιστάθμιση μέσω Παρατηρητή –
Κέρδος Εισόδου Αναφοράς
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 44
( ) ( ) ( )x t A x t B u t= ⋅ + ⋅!
( ) ( ) 1 p pCLH s C s I A B K B G− ×= ⋅ ⋅ − + ⋅ ⋅ ∈!
( ) ( ) ( )ˆu t K x t G r t= − ⋅ + ⋅ ( ) ( ) ( ) ( )ˆx t A x t B K x t BG r t= ⋅ − ⋅ ⋅ + ⋅!
x̂ x x= − ! ( ) ( ) ( ) ( ) ( )x t A B K x t B K x t BG r t= − ⋅ ⋅ + ⋅ ⋅ + ⋅! "
( ) ( ) ( )x t A L C x t= − ⋅ ⋅!" "( )( )
( )( )
( )( )
( )
( ) [ ] ( ) ( )
0 0
0T
x t A B K B K x t BGr t
x t A L C x t
y t C x t x t
− ⋅ ⋅⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤= ⋅ + ⋅⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥− ⋅ ⎣ ⎦⎣ ⎦ ⎣ ⎦ ⎣ ⎦
= ⋅ ⎡ ⎤⎣ ⎦
!!" "
"
( ) 0 0x t t= ∀ ≥!
• Η µεθοδολογία του Σερβοµηχανισµού προτάθηκε προγουµένως ως εύρωστη αναφορικά µε τις αβεβαιότητες των παραµέτρων ανοικτού βρόχου, µε την έννοια ότι: – Διασφαλίζεται η παρακολούθηση της εισόδου βαθµίδας, – Εφόσον η ευστάθεια κλειστού βρόχου είναι δεδοµένη.
• Σκοπεύουµε να επιτύχουµε: – Ασυµπτωτική ευστάθεια του συστήµατος κλειστού βρόχου, και – Ασυµπτωτική παρακολούθηση εισόδου αναφοράς τύπου συνάρτησης βαθµίδας.
• Θεωρούµε την περίπτωση SISO και στηριζόµαστε στις παρακάτω προϋποθέσεις:
1) Το ζεύγος (Α,Β) είναι ελέγξιµο και παρατηρήσιµο 2) To 0 δεν ειναι πόλος του συστήµατος ανοικτού βρόχου 3) To 0 δεν ειναι µηδενιστής του συστήµατος ανοικτού βρόχου
Παρακολούθηση Εισόδου Βαθμίδας: Αντιστάθμιση μέσω Παρατηρητή – Σχεδιασμός «Σερβομηχανισμού»
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 45
Το s=0 δεν είναι ούτε πόλος ούτε μηδενιστής του συστήματος ανοικτού βρόχου
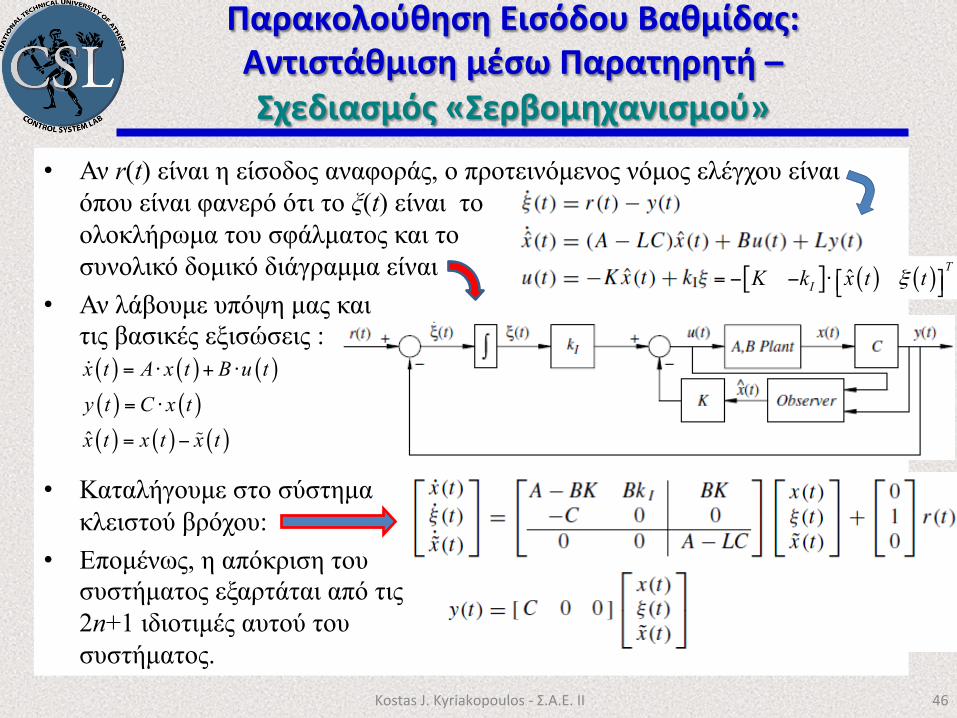
• Αν r(t) είναι η είσοδος αναφοράς, ο προτεινόµενος νόµος ελέγχου είναι όπου είναι φανερό ότι το ξ(t) είναι το ολοκλήρωµα του σφάλµατος και το συνολικό δοµικό διάγραµµα είναι
• Αν λάβουµε υπόψη µας και τις βασικές εξισώσεις :
• Καταλήγουµε στο σύστηµα κλειστού βρόχου:
• Εποµένως, η απόκριση του συστήµατος εξαρτάται από τις 2n+1 ιδιοτιµές αυτού του συστήµατος.
Παρακολούθηση Εισόδου Βαθμίδας: Αντιστάθμιση μέσω Παρατηρητή – Σχεδιασμός «Σερβομηχανισμού»
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 46
[ ] ( ) ( )ˆ TIK k x t tξ= − − ⋅ ⎡ ⎤⎣ ⎦
( ) ( ) ( )( ) ( )( ) ( ) ( )ˆ
x t A x t B u t
y t C x t
x t x t x t
= ⋅ + ⋅
= ⋅
= −
!
"
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ
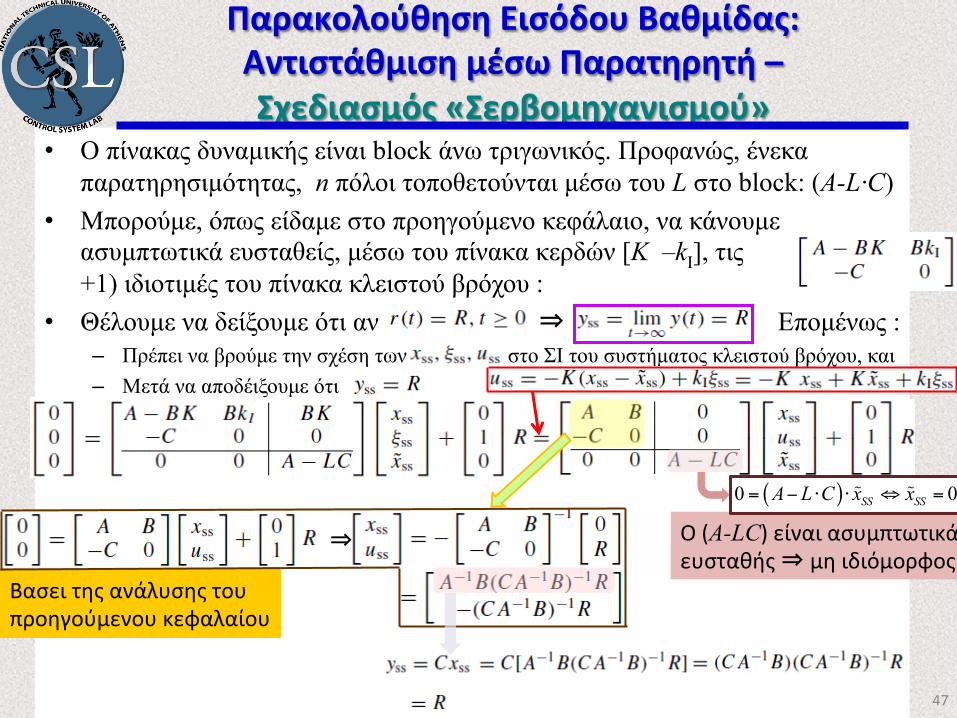
• Ο πίνακας δυναµικής είναι block άνω τριγωνικός. Προφανώς, ένεκα παρατηρησιµότητας, n πόλοι τοποθετούνται µέσω του L στο block: (A-L·C)
• Μπορούµε, όπως είδαµε στο προηγούµενο κεφάλαιο, να κάνουµε ασυµπτωτικά ευσταθείς, µέσω του πίνακα κερδών [Κ –kΙ], τις (n+1) ιδιοτιµές του πίνακα κλειστού βρόχου :
• Θέλουµε να δείξουµε ότι αν ⇒ Εποµένως : – Πρέπει να βρούµε την σχέση των στο ΣΙ του συστήµατος κλειστού βρόχου, και – Μετά να αποδέιξουµε ότι
Παρακολούθηση Εισόδου Βαθμίδας: Αντιστάθμιση μέσω Παρατηρητή – Σχεδιασμός «Σερβομηχανισμού»
47
Ο (Α-LC) είναι ασυμπτωτικά ευσταθής ⇒ μη ιδιόμορφος
( )0 0SS SSA L C x x= − ⋅ ⋅ ⇔ =! !
⇒
Βασει της ανάλυσης του προηγούμενου κεφαλαίου
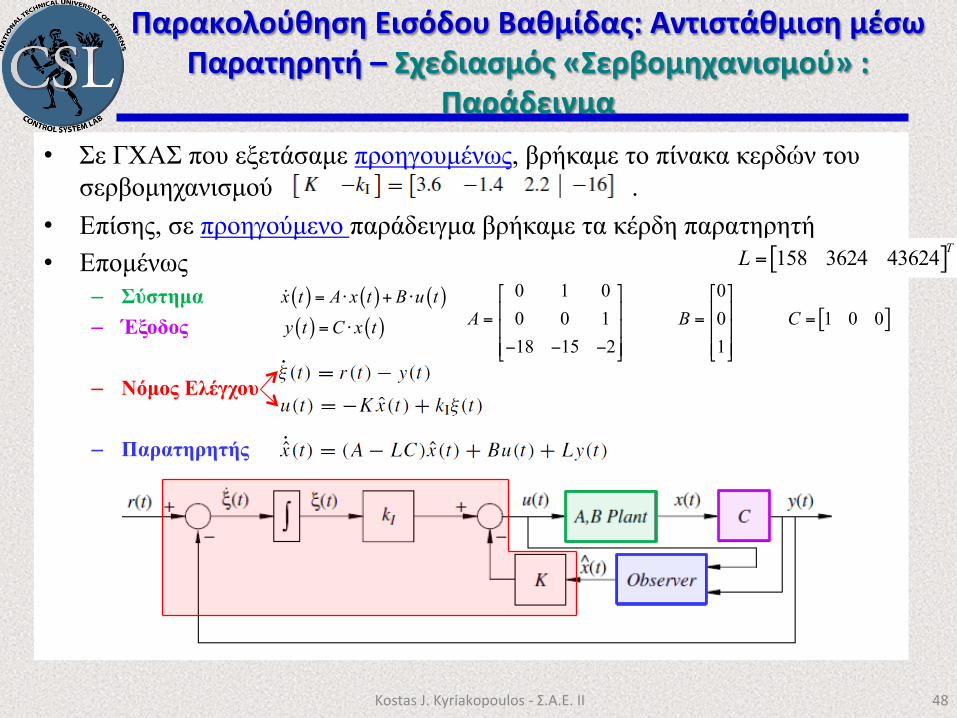
• Σε ΓΧΑΣ που εξετάσαµε προηγουµένως, βρήκαµε το πίνακα κερδών του σερβοµηχανισµού .
• Επίσης, σε προηγούµενο παράδειγµα βρήκαµε τα κέρδη παρατηρητή • Εποµένως
– Σύστηµα – Έξοδος
– Νόµος Ελέγχου
– Παρατηρητής
Παρακολούθηση Εισόδου Βαθμίδας: Αντιστάθμιση μέσω Παρατηρητή – Σχεδιασμός «Σερβομηχανισμού» :
Παράδειγμα
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 48
[ ]158 3624 43624 TL =
[ ]0 1 0 00 0 1 0 1 0 018 15 2 1
A B C⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥= = =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥− − −⎣ ⎦ ⎣ ⎦
( ) ( ) ( )x t A x t B u t= ⋅ + ⋅!
( ) ( )y t C x t= ⋅
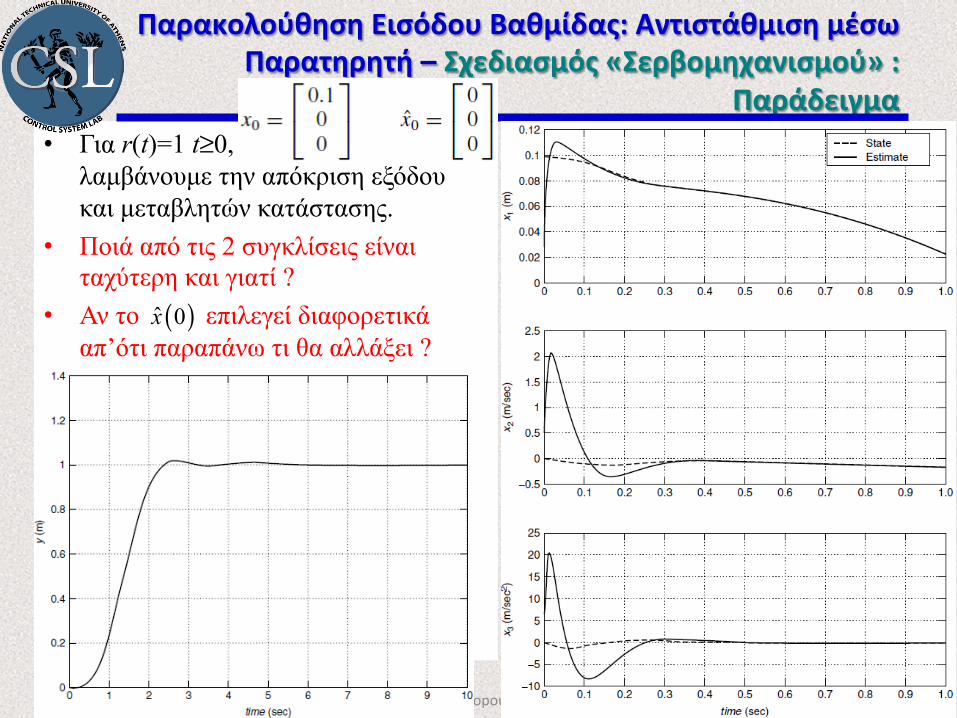
• Για r(t)=1 t≥0, λαµβάνουµε την απόκριση εξόδου και µεταβλητών κατάστασης.
• Ποιά από τις 2 συγκλίσεις είναι ταχύτερη και γιατί ?
• Αν το επιλεγεί διαφορετικά απ’ότι παραπάνω τι θα αλλάξει ?
Παρακολούθηση Εισόδου Βαθμίδας: Αντιστάθμιση μέσω Παρατηρητή – Σχεδιασμός «Σερβομηχανισμού» :
Παράδειγμα
Kostas J. Kyriakopoulos -‐ Σ.Α.Ε. ΙΙ 49
( )ˆ 0x
Top Related