




γλώσσες
Σελίδες
Νομικός


Συστήµατα Αυτοµάτου Ελέγχου ΙΙ
Ασκήσεις Πράξης

..
2
n
n
2
Ασκήσεις 1 – Μόνιµα Σφάλµατα & Κριτήρια ευστάθειας
Άσκηση 1.1.
∆ίνεται σύστηµα µε συνάρτηση µεταφοράς: G(s)
40s 2 3s 16
α) Βρείτε τους φυσικούς συντελεστές:
συστήµατος.A,n , και τους πόλους p1 ,
p2
του
β) Υπολογίστε την υπερύψωση της βηµατικής του απόκρισης y(t) , καθώς και τον
χρόνο tm και την µέγιστη τιµή
ym που αντιστοιχεί σε αυτόν.
γ) Υπολογίστε προσεγγιστικά τους χρόνους αποκατάστασης Ts και ανύψωσης Tr .
Λύση
α) Η συνάρτηση µεταφοράς συστήµατος δεύτερης τάξης είναι:A2
G(s)
s 2 2ns 2
Εφόσον:
n
G(s)
n
40s 2 3s 16
Έχουµε: 2
16άρα n 4
A2
40 άρα A
40n
40
2,516
2n
3 άρα 3
2n
3
0,3758
Οι πόλοι προκύπτουν από τη σχέση: s 2 3s 16 0
Άρα: p1,2 1,5
2,25 16 1,5 j3,7 1,5
και 3,7
β) Υπερύψωση: u e12
e e1,53,7
οπότε: u 0,28

..
3
r
σε χρόνο: t
m
3,7
0,85 ,
ym A(1 U ) 2,5 1,28 3,2
γ) Χρόνος αποκατάστασης:Ts
4 n
40,375 4
2,67
για 2%
Χρόνος ανύψωσης: T 1
2,5n
1 2,5 0,375 0,484

Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
Άσκηση 1.2.
4
∆ίνεται κλειστό σύστηµα ελέγχου:
α) Υπολογίστε το µόνιµο σφάλµα ταχύτητας και θέσης του συστήµατος για
K 16 .K 8 και
β) Ποια η τιµή του κέρδους K όταν το µόνιµο σφάλµα είναι e0.1 και e0.2 .
Λύση
α) G(s)
2Ks(s
3)
άρα: A 2K
3
, a 1
Μόνιµο σφάλµα θέσης: e0 για κάθε K
Μόνιµο σφάλµα ταχύτητας: e 1 3A 2K
Για K 8 :
A 16
5.33 , e
3
0,188
Για K 16 :
A 32
10,66 , e
3
0,094
3β) Αντίστροφα: e2K ή K
3
2e
εάν e0,1 K
εάν e0,2 K
32
0,1
3
15
7,5
2 0,2

Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
Άσκηση 1.3.
5
α) ∆ίνεται χαρακτηριστικό πολυώνυµο: Q(s) s5 7s 4 3s3 19s 2 4s 12
Εξετάστε κατά Routh την ευστάθεια του.
β) ∆ίνεται χαρακτηριστικό πολυώνυµο: Q(s) s5 2s 4 2s3 4s 2 8s 12
Εξετάστε κατά Routh την ευστάθεια του (εψιλοντικό).
γ) ∆ίνεται χαρακτηριστικό πολυώνυµο: Q(s) (s 4)(s 2)2 K (s 1)2
Εξετάστε κατά Routh για ποια K (θετικά ή αρνητικά) είναι ευσταθές (παραµετρικό).
δ) ∆ίνεται χαρακτηριστικό πολυώνυµο: Q(s) (s a)2 (s 1) K (s 1)
Εξετάστε κατά Routh για ποια a, K
Σχεδιάστε το πεδίο ευστάθειας.
(θετικά) είναι ευσταθές (διπλό παραµετρικό).
Λύση
α) Έχουµε: Q(s) s5 7s 4 3s3 19s 2 4s 12
O πίνακας και οι συντελεστές Routh είναι:
(1)
(2)
5 14 73 b1
5.72 c1 121 d1
00 e1 12
3 419 12b2
5.7 120
Οπότε: b 1
(19 21) 5,7 , b 1
(12 28) 5,71 7
c
1
2
(40 108,3) 12 , c
7
12 ,
1 5,7
d 1
(68,4 68,4) 0 , e
2
12
1 12 1
Έχουµε δύο αλλαγές προσήµου (1), (2) στους συντελεστές Routh.
Άρα το σύστηµα είναι ασταθές µε δύο ασταθείς πόλους.

Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
β) Έχουµε: Q(s) s5 2s 4 2s3 4s 2 −8s 12
6
O πίνακας και οι συντελεστές Routh είναι:
5 1
4 2
3 b1
0
2 84 12
b2 14
2(1) 1(2) 0
c 28
0 121 d1 14 0e1 12
Οπότε: b
1 (4 4) 0 ,
b
1 (12 16) 14
1 2 2 2c
1 (28 4)
28 0 ,
d (12
392) 14
1 1 28 Έχουµε δύο αλλαγές προσήµου (1), (2) στους συντελεστές Routh.
Άρα το σύστηµα είναι ασταθές µε δύο ασταθείς πόλους.
γ) Έχουµε:Q(s) (s 4)(s 2)2 K (s 1)2
Q(s) s3 (8 K )s 2 (20 2K )s 16 K
O πίνακας και οι συντελεστές Routh είναι:
3 12 8 K1 b1
0 16 K
20 2K16 K
0
όπου b1
1
8 K
(16 K (8 K )(20 2K )
18
K
(2K 2 3K 144) ,
3 9 1152 3 34,1
⎧9,3⎫2K 2 3K 144 0 K
⎨ ⎬
b1
28
K
1,2 4
(K 9,3)(K 7,8)
4 ⎩7,8⎭

Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
β) Έχουµε: Q(s) s5 2s 4 2s3 4s 2 −8s 12
7
Πρέπει να ισχύουν οι ανισότητες: 8 K 0 άρα K 8 ,
b1 0 άρα (K 9,3)(K 7,8) 0
ή 9,3 K 7,8
16 K 0 άρα K 16
Οπότε: 8 K 7,8

Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
8
δ) Έχουµε: Q(s) (s a)2 (s 1) K (s 1)
Q(s) s3 (2a 1)s 2 (a 2 2a K )s a 2 K
O πίνακας και οι συντελεστές Routh είναι:
3 12 2a 1 01 b1 00 a 2 K 0
a 2 2a K a 2 K
0
b1
12a 1
, όπου
a 2 K (2a 1)(a 2 2a K ) 2a3 4a 2 2a 2(a 1)K 2(a 1)(a(a 1) K )
Πρέπει 2a 1 0
a 2 K 0 ή
K a 2
και 2(a 1)(a(a 1) K ) 0 ή
K a(a 1)
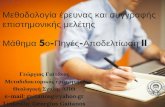
Σχεδιάζουµε τις παραβολές K a 2
και K a(a 1) , εντοπίζουµε τα πεδία των
παραπάνω ανισοτήτων για
(a, K ) (σκιαγραφηµένο).
a, K
θετικά και ορίζουµε το πεδίο ευστάθειας στο επίπεδο
a K a 2 K a(a 1)
0 0 0
1 1 -2
2 4 -6

2
Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
9
Ασκήσεις 2 (Τεστ)
Άσκηση 2.1. Ευστάθεια και µόνιµο σφάλµα
∆ίνεται κλειστό σύστηµα ελέγχου µε συνάρτηση µεταφοράς ανοιχτού συστήµατος:
G(s) ( 1) s 2 K s 2 (s K 1)
α) Εξετάστε την ευστάθεια του συστήµατος κατά Routh και βρείτε για ποια Κ είναι
ευσταθές το κλειστό σύστηµα
β) Θεωρώντας ως είσοδο: r(t) 0.3t 2
υπολογίστε για ποιο Κ θα έχει το κλειστό
σύστηµα µόνιµο σφάλµα: e0.4
Λύσηα) Ευστάθεια:
Το χαρακτηριστικό πολυώνυµο του κλειστού συστήµατος είναι:
Q(s) s 2 (s 1) (K 1)s 2K s3 (1)s 2 (K
1)s 2K Ο πίνακας και οι συντελεστές Routh είναι:
3 12 K 1 01 b 00 2K 0
K 1 2K
όπου b 1K
1
(2K (K 1)(K 1))
K
2K 1K 1
K 2 2K 1 0 K 1,2 1
⎧2.42 1 1.4 ⎨
⎩0.4
Άρα: b ( K 2.4)( K 0.4) K 1
Για να είναι ευσταθές το σύστηµα πρέπει:

Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
10
2K 0 άρα
K 0 , οπότε
K 1 0 και
K 0.4 0
Άρα b 0 όταν
K 2.4 0 . Οπότε το σύστηµα είναι ευσταθές όταν: K 2.4

3
Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
11
β) Μόνιµο σφάλµα
1ος τρόπος: Με υπολογισµό του µόνιµου σφάλµατος:
e lim s E(s) lim s R(s)
s0 s0 1 G(s)
R(s) 0.3
2
s 3
0.6s 3
s 0.6
elim
s
lim
0.6
s0 ( K 1) s 2 K 1
s 2 (s K 1)
e lim 0.6 0.6( K 1)
s0 ( K 1) s 2 K ήs 2
(s K 1)
s0 2 K K 1
2K
0.6(K 1)Πρέπει: e0.4 ή
0.4 ή 0.6K 0.6 0.8K
2K
ή 0.2K 0.6
Άρα K 3
2ος τρόπος: Με χρήση του πίνακα:
Μόνιµο σφάλµα επιτάχυνσης για: r(t) 1
t 2
2
1e
A
Άρα για: r(t) 0.3t 2
e 2 0.3 0.6
Η ενίσχυση της G(s) είναι: A
A
2KK 1
, άρα e 0.6(1) 2
Πρέπει: e0.4
Άρα K 3

1,2
2 2
Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
12
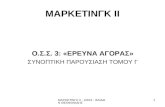
Άσκηση 2.2. Τόπος ριζών∆ίνονται δύο κλειστά συστήµατα ελέγχου:
G1 (s) 1s(s
2)
G2 (s) s 2s(s 4)
α) Σχεδιάστε τους δύο τόπους ριζών. Υπολογίστε όπου υπάρχουν σηµεία διακλάδωσης
και σηµεία τοµής µε τον φανταστικό άξονα.
β) Υπολογίστε για ποια
πόλους.
K1 , K 2
θα έχουν τα δύο κλειστά συστήµατα τους ίδιους
γ) Υπολογίστε για K1 K 2 6 τους πόλους των δύο κλειστών συστηµάτων.
Λύση
α) Το σύστηµα G1 (s)
1s(s
2)
έχει: n 2 πόλους:
p1
0 ,p2 2 και m 0 ρίζες.
Οι ασύµπτωτες είναι: n m 2 0 2 και ισχύει:
0 2 1 ⎪⎧900
Sασ.
,
2
ασ. ⎨⎪⎩2700
Το σύστηµα G2 (s)
s 2s(s 4)
έχει n 2 πόλους:
p1
0 ,p2 4 , m 1 ρίζα
z1 2
Σηµεία διακλάδωσης:dG(s)
0 , οπότε
ds
(s 2 4s) (s 2)(2s 4) 0
s 2 4s 2s 2 4s 4s 8 0
⎧1.4s 2 4s 8 0 s 2
4 8 2 3.4 ⎨
⎩5.4
Σηµεία τοµής µε το φανταστικό άξονα:
Q02 (s) s 4s K 2 (s 2)
s(K 2 4)s 2K 2
Για s jείναι:

2
02
Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
13
Q0 ( j) (K 2 4) j2K 2 0 ή
οπότε πρέπει: 2K 2
2
0και K 02 4
δηλαδή 2 8 και 2.8

2
2
Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
14
β) Σηµεία τοµής των τόπων ριζών:
Q01 (s) s(s 2) K1
s 2s K1
Q02 (s) s
(K 2 4)s 2K 2
Πρέπει !
Q01 (s) Q02
(s) :
Άρα 2 K2
4, K1 2K2
ήK2
6και K1 12
Οπότε: Q0 (s) s 2 2s 12 και οι κοινοί πόλοι: s 0
1,2
1
1 12 1 j3.3
γ. Για κοινό Κ: K1 K 2 6 :
Q01 (s) s 2 2s 6 0
s1,2 1
1 6 1 j2.2

A0
2
n
2
Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
15
Ασκήσεις 3 – Σύνθεση µε τη µέθοδο του τόπου ριζών
Άσκηση 3.1. ∆ίνονται χρονικές προδιαγραφές:
υπερύψωση: 20% , χρόνος αποκατάστασης: Ts 2sec και
µόνιµο σφάλµα θέσης: e 10% .
Βρείτε:
α) τους φυσικούς συντελεστές ,n ,
β) τους επιθυµητούς πόλους p01 , p02 και τη θέση τους στο µιγαδικό επίπεδο,
γ) την επιθυµητή ενίσχυση
A0 του ανοιχτού και ' του κλειστού συστήµατος ελέγχου,
δ) την ολική συνάρτηση µεταφοράς G0 (s) του επιθυµητού προτύπου.
Λύσηα) Συντελεστής απόσβεσης:
ln 0.2
ln 2 u 2
ln 0.2
ln 2 0.2 2
1.61
0.46 1
3.53
, 630
Φυσική συχνότητα: 4
4
4.35n Ts 2 0.46
β) Επιθυµητοί πόλοι: p01,2n
jn
1 2 2 j4
γ) Επιθυµητή ενίσχυση:
Από το σφάλµα θέσης υπολογίζουµε την ενίσχυση του ανοιχτού συστήµατος:
e
11
A0
1A0
e
1
10.1
1 9
A '
A0
9
Και η ενίσχυση του κλειστού συστήµατος είναι:
δ) Ολική συνάρτηση µεταφοράς προτύπου:
0 1 A0
0.910
G (s)
A0n 0.9 4.35 2 17 0
s 2 2 s n s 2 2 0.46 4.35s 4.352
s 2 4s 19

Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
16
Άσκηση 3.2. ∆ίνεται σύστηµα µε συνάρτηση µεταφοράς: G(s)
2(s 1) 2
α) Για να εξασφαλίσετε επιθυµητή ενίσχυση (ανοιχτού συστήµατος):
υπολογίστε ελεγκτή P ή Lag.
A0 10
β) Για να εξασφαλίσετε επιθυµητούς πόλους
υπολογίστε ελεγκτή PD, PI ή Lead.
p01,2 2 j4
γ) Για να εξασφαλίσετε και τις δύο παραπάνω προδιαγραφές προσθέστε τον κατάλληλο
ελεγκτή Lag.
Σε όλες τις περιπτώσεις διερευνήστε την ευστάθεια του ολικού συστήµατος ελέγχου.
Λύση
α) Το σύστηµα:
G(s)
2(s 1)2 2
s2 2s 1έχει διπλό ασταθή πόλο p1,2 1
Τόπος ριζών και επιθυµητοί πόλοι:
Επιθυµητή ενίσχυση: A0 10
Ελεγκτής P: C(s) K , άρα C(s)G(s)
2K(s 1)2
Ενίσχυση:!
A 2K A0 10 K 5

'
0
Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
17
Ελεγκτής Lag: C(s)
s z' , άρα C(s)G(s)
s p'
2(s z')(s p')(s
1) 2
Ενίσχυση: A 2zp '
!
A0
10 2z ' 10 p ' ή
z ' 5 p ' ,
5
Για p' 0.1 είναι
z' 0.5 και C(s) s 0.5
s 0.1
∆ιερεύνηση πόλων:
Με ελεγκτή αναλογίας: Το κλειστό σύστηµα είναι ασταθές για όλα τα K .
Με ελεγκτή Lag: Το χαρακτηριστικό πολυώνυµο και ο πίνακας Routh είναι:
Q (s) (s 0.1)(s 2 2s 1) 2(s 0.5) s 3 1.9s 2 2.8s 1.1
3 12 1.9
2.81.1
όπου b1
11.9
(1.1 2.8 19) 3.4 0 ,
1 b1 0 00 1.1 0 Άρα το κλειστό σύστηµα έχει 2 ασταθείς πόλοι
Οπότε και οι δύο ελεγκτές εξασφαλίζουν την επιθυµητή ενίσχυση αλλά το σύστηµα
ελέγχου είναι ασταθές.
β) Εξασφάλιση των επιθυµητών πόλων: p01,2 2 j4
Ελεγκτής PD: C(s) K (s z) , άρα C(s)G(s) 2K (s z)
(s 1)2
Κριτήριο γωνιών:p1
p2
z
180
z
74
p1
p2
180 4
1270
3
z 740 3.49
4z 2
z
43.49
2 3
Κριτήριο µέτρων:
K p1
p22z
25
3.1258

Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
18
p1 p2
42 32
5και z 42 12 4
Άρα C(s) 3.125(s 3) , αποδεκτός ελεγκτής

z
0
z
z
z
Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
19
∆ιερεύνηση ευστάθειας:
G'(s) C(s)G(s) 2 K ( s z ) 6.25( s 3) (s 1) 2 (s 1)2
Το χαρακτηριστικό πολυώνυµο και ο πίνακας Routh είναι:
Q (s) (s 1) 2 6.25(s 3) s 2 4.25s 19.75
2 11 4.250 19.75
19.750
Άρα το κλειστό σύστηµα ελέγχου µε ελεγκτή PD είναι ευσταθές.
Ελεγκτής PΙ: C(s) K (s z)
, άρα C(s)G(s) 2K (s z)
s s(s 1)2
Κριτήριο γωνιών:p1
p2
127
1804
116.60
p 2p1
p2
p
z
180
190
Ο ελεγκτής απορρίπτεται εφόσον πρέπει z
180
Ελεγκτής Lead: C(s) K (s z)
, άρα C(s)G(s)
(s p)
2K (s z) (s p)(s 1)2
Κριτήριο γωνιών:p1
p2
p
z
180 ,
p1
p2
127
74
p ,
0 p 116.6
Άρα 740 1800
ή 740 1160
για z>0
Από τον ελεγκτή PD για z
74
z 3
Άρα πρέπει 3<z<0, επιλέγω z=2:

0
p
Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
20
Κριτήριο γωνιών:p1
p2
p
z
180
16
Άρα p
160
4p 2
0.29 p 16 , ευσταθής πόλος αποδεκτός

0
0
Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
21
Κριτήριο µέτρων:
p1 p2 5 , p
42
14214.5 , z 4
K p1 p2 p 45.32z
Άρα ελεγκτής Lead: C(s) 45,3 (s 2)
:(s 16)
∆ιερεύνηση ευστάθειας: C(s)G(s)
2K (s 2)(s 16)(s
1)2
Το χαρακτηριστικό πολυώνυµο και ο πίνακας Routh είναι:
Q (s) (s 1) 2 (s 16) 2K (s 2) (s 2 2s 1)(s 16)
2Ks 4K Q (s) s 3 14s 2 (2K 31)s 4K 16 0
3 12 141 b1 00 4K 16
2K 314K
160
b 1
(4K 16 28K 434) 1.7K 3 ,1 14
c1 4K 16 0
Άρα 1.7K 32 K 18.8
και 4K 16 K 4
Ευσταθές για Κ>18.8 , άρα ο ελεγκτής Lead αποδεκτός.
γ) Επιθυµητή ενίσχυση 0 10 και επιθυµητοί πόλοι:
Ελεγκτής PD: C(s) 3.125(s 3) , άρα C(s)G(s) 6.25(s 3)
(s 1) 2
18.75 0 10 άρα δεν χρειάζεται διόρθωση.
Ελεγκτής Lead: C(s) 45,3 (s
2)
(s 16)
, άρα C(s)G(s)
90.6(s 2)(s 16)(s
1)2
11.325 0 10 άρα δεν χρειάζεται διόρθωση.

Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
22
Άσκηση 4 – ∆ιαγράµµατα NyquistΣχεδιάστε τα διαγράµµατα Nyquist των συστηµάτων:
(s 2)2
1. G(s)
2. G(s)
3. G(s)
s3
s3
(s 2)2
8s 2 (s 2)2
Ειδικότερα:
α) Βρείτε την αρχική και την τελική φάση: 0 ,
διαγραµµάτων.
και σχεδιάστε τα σκαριφήµατα των
β) Υπολογίστε ασύµπτωτες και σηµεία τοµής µε τον πραγµατικό και τον φανταστικό
άξονα, όπου υπάρχουν.
γ) Εξετάστε την ευστάθεια των αντίστοιχων κλειστών συστηµάτων κα βρείτε τα οριακά
µεγέθη K0 ,0 .
Λύση
(s 2)2
4.1 G(s) µε χαρακτηριστικά: a 3 και n m 1s3
Έχουµε:
Για s j
(0)a
23 ,
2( )
(n m)
2 .
2
G( j) ( j2)2
j3
j3 (4 2 4 j)6
4 j j2
4
3
4 2
Re G 4
:2
Im G 3
0 : ReG
: ReG 0
ImG
Im G 1
0
Τοµή µε πραγµατικό άξονα:

0
Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
23
ImG 0 για 4 2 0 , άρα 2
1Οπότε: x0 Re G(0 ) 1 και
οριακόK 0
:K 0 1
x0

Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
Το διάγραµµα Nyquist είναι:
0
24
Το κλειστό σύστηµα είναι ευσταθές για
s3
K K 0 1
4.2 G(s) (s
2)2
µε χαρακτηριστικά: a 3 και n m 1
Έχουµε:
Για s j(0)
a
23
2
, ( )
(n m)
2 .
2
G( j) j3
( j2)2
j3 (2 j)2
(4 )2
j3 (4 2 4 j)
(4 )2
4 j3 j5
44 )
(4 )2
ReG
44
:(4 2
)2
ImG
(4 2 )3
(4 2 )2
0 : ReG 0
ImG 0
: ReG 4
ImG
Τοµή µε πραγµατικό άξονα:
ImG 0 για 2 4 0 , άρα 2

Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
Το διάγραµµα Nyquist είναι:
25
Οπότε: x0 Re G(0 ) 1
1οριακό K 0
:K 0 1
x0

Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
Το διάγραµµα Nyquist είναι:
26
Το κλειστό σύστηµα είναι ευσταθές για K K 0 1
4.3 G(s)
8s 2 (s 2)2
µε χαρακτηριστικά: a 2 και n m 4
Οπότε: (0)
a
2 ,
( )
(n m)
22.
Για s j
8 8(2 j)2 8(4 2 4 j) 32 82 32 jG( j)
2 ( j2)2
2 (4 2 )2
2 (4 2
)2
2 (4 2 )2
Re G
32 82
:2 (2 4)2 Im G
32
(4 2
)2
0 : ReG
ImG
: ReG 0
ImG 0

0
Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
Το διάγραµµα Nyquist είναι:
27
Τοµή µε φανταστικό άξονα:
ReG 0 για 32 82 0 , άρα 2
Οπότε: y0 Im G(0 ) 0.25

Α σ κ ή σ ε ι ς π ρ ά ξ η ς Σ Α Ε Ι Ι
..
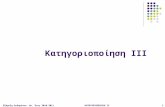
Το διάγραµµα Nyquist είναι:
28
Το διάγραµµα Nyquist περικλείει το -1, άρα το κλειστό σύστηµα είναι ασταθές για όλα
τα Κ.
Top Related