Y = aX + b - Faculty Website Listing · MS Excel functions for linear and logarithmic regression...
19
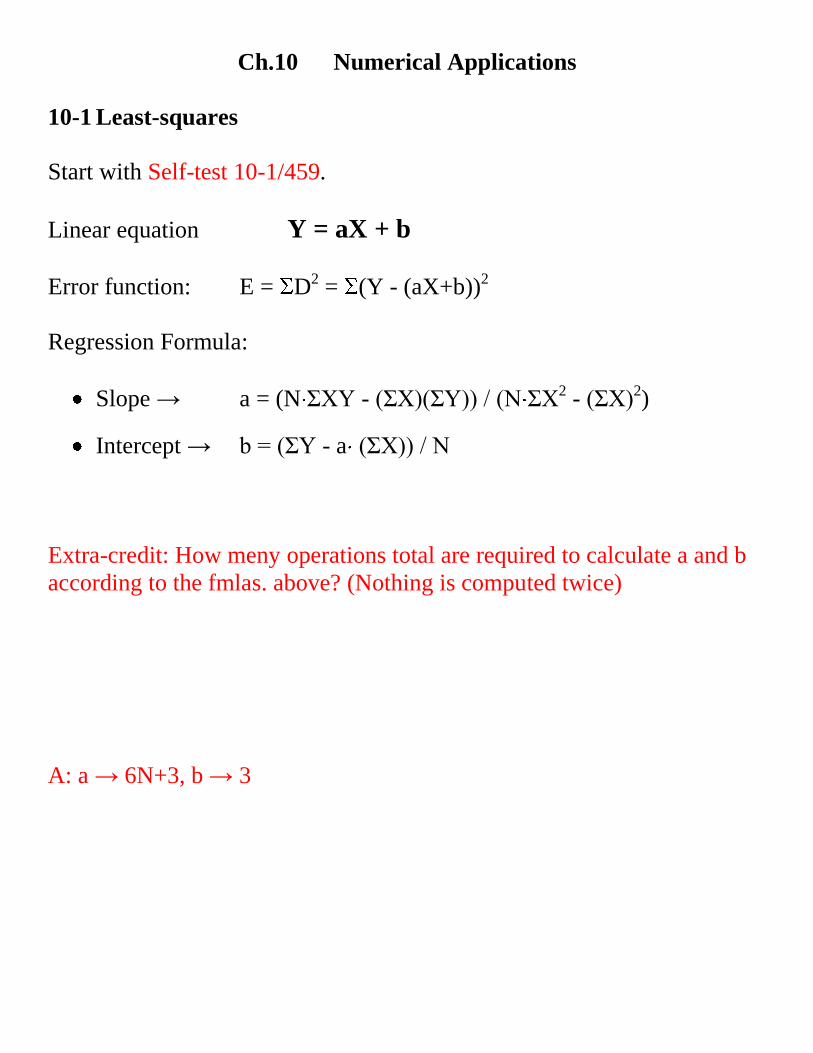
Ch.10 Numerical Applications 10-1 Least-squares Start with Self-test 10-1/459. Linear equation Y = aX + b Error function: E = D 2 = (Y - (aX+b)) 2 Regression Formula: Slope → a = (N ΣXY - (ΣX)(ΣY)) / (N ΣX 2 - (ΣX) 2 ) Intercept → b = (ΣY - a (ΣX)) / N Extra-credit: How meny operations total are required to calculate a and b according to the fmlas. above? (Nothing is computed twice) A: a → 6N+3, b → 3
Transcript of Y = aX + b - Faculty Website Listing · MS Excel functions for linear and logarithmic regression...
Ch.10 Numerical Applications
10-1 Least-squares
Start with Self-test 10-1/459.
Linear equation Y = aX + b
Error function: E = D2 = (Y - (aX+b))2
Regression Formula:
Slope → a = (N ΣXY - (ΣX)(ΣY)) / (N ΣX2 - (ΣX)2)
Intercept → b = (ΣY - a (ΣX)) / N
Extra-credit: How meny operations total are required to calculate a and b
according to the fmlas. above? (Nothing is computed twice)
A: a → 6N+3, b → 3
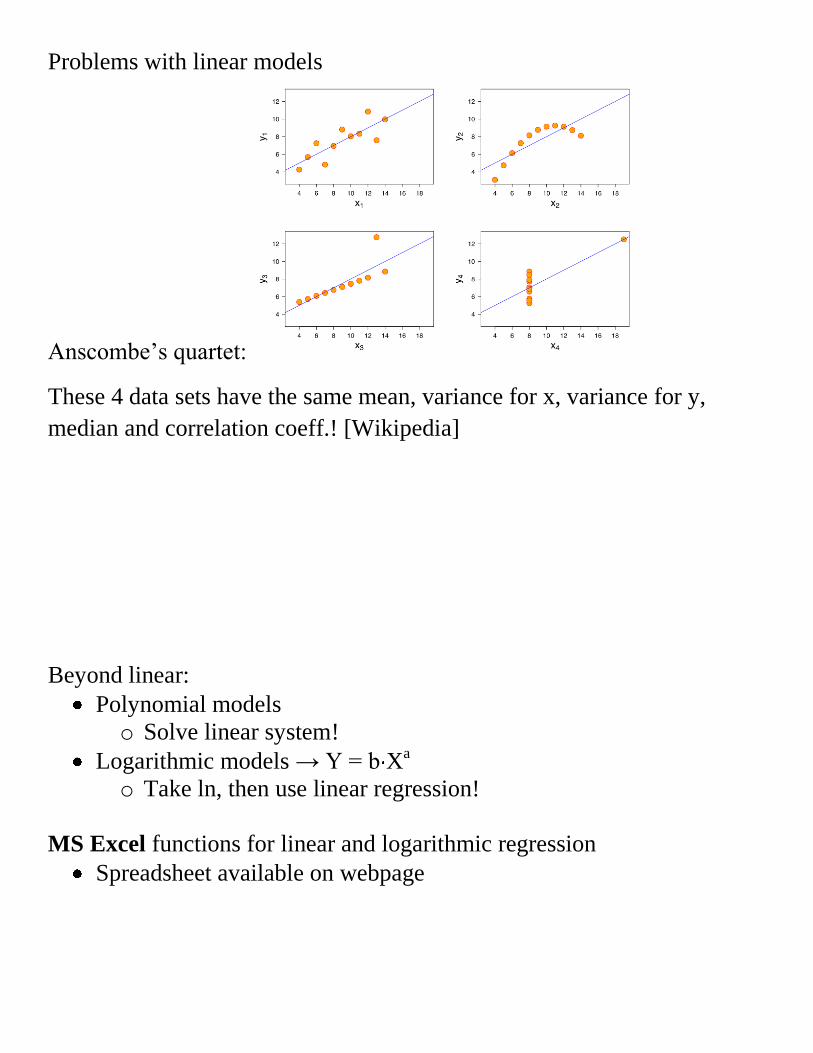
Problems with linear models
Anscombe’s quartet:
These 4 data sets have the same mean, variance for x, variance for y,
median and correlation coeff.! [Wikipedia]
Beyond linear:
Polynomial models
o Solve linear system!
Logarithmic models → Y = b Xa
o Take ln, then use linear regression!
MS Excel functions for linear and logarithmic regression
Spreadsheet available on webpage
10-3 Matrix Operations
Scalar multiplication
Matrix add., sub.
Dot product (vector mult.)
Matrix mult.
Self-test 10-2 / 472
------------------------------------------------------------------------------
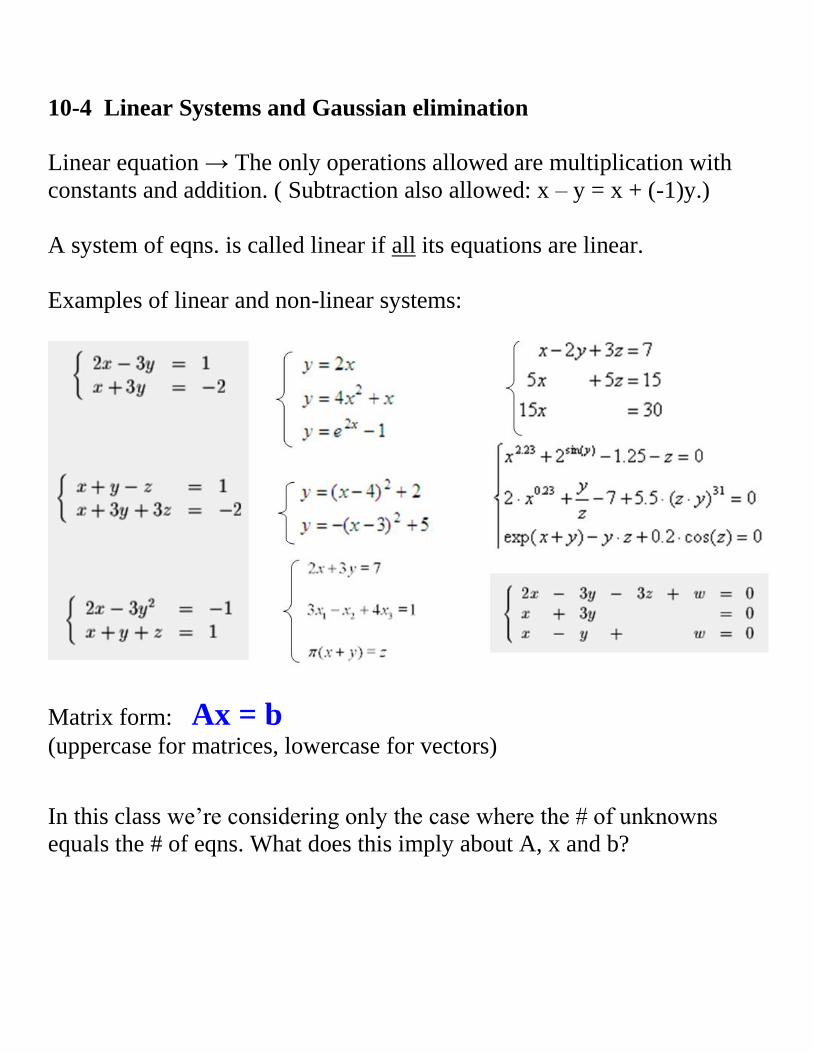
10-4 Linear Systems and Gaussian elimination
Linear equation → The only operations allowed are multiplication with
constants and addition. ( Subtraction also allowed: x – y = x + (-1)y.)
A system of eqns. is called linear if all its equations are linear.
Examples of linear and non-linear systems:
Matrix form: Ax = b
(uppercase for matrices, lowercase for vectors)
In this class we’re considering only the case where the # of unknowns
equals the # of eqns. What does this imply about A, x and b?
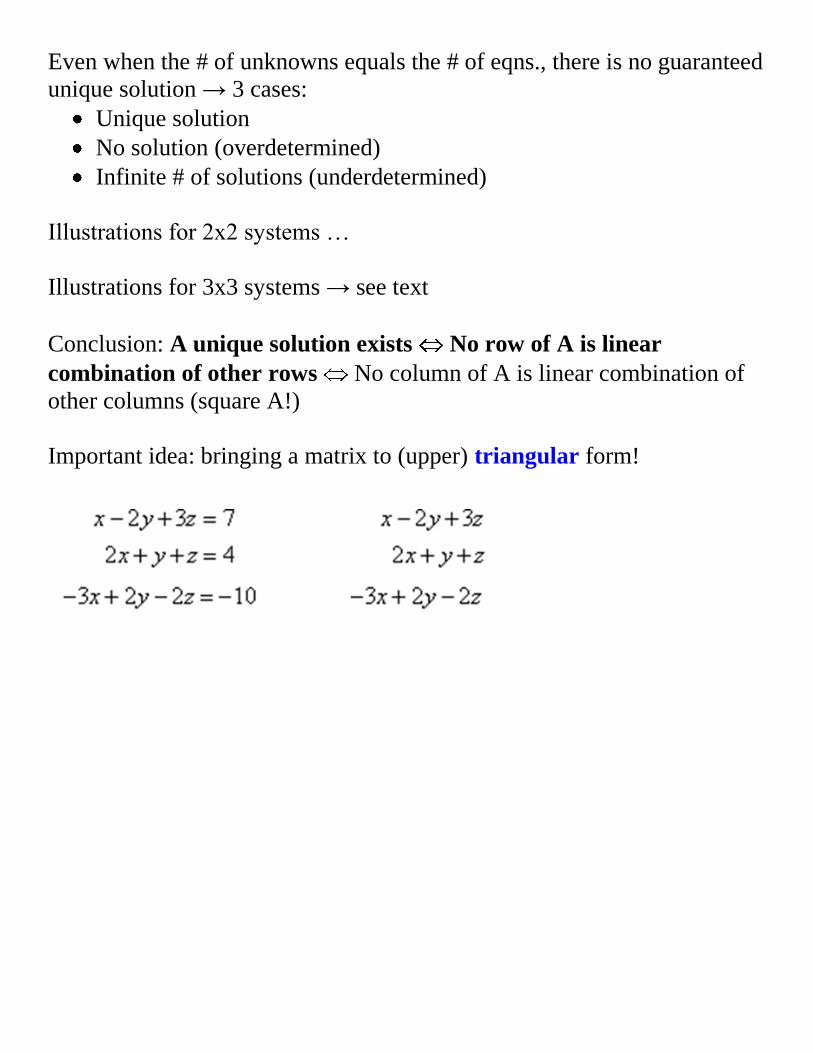
Even when the # of unknowns equals the # of eqns., there is no guaranteed
unique solution → 3 cases:
Unique solution
No solution (overdetermined)
Infinite # of solutions (underdetermined)
Illustrations for 2x2 systems …
Illustrations for 3x3 systems → see text
Conclusion: A unique solution exists No row of A is linear
combination of other rows No column of A is linear combination of
other columns (square A!)
Important idea: bringing a matrix to (upper) triangular form!
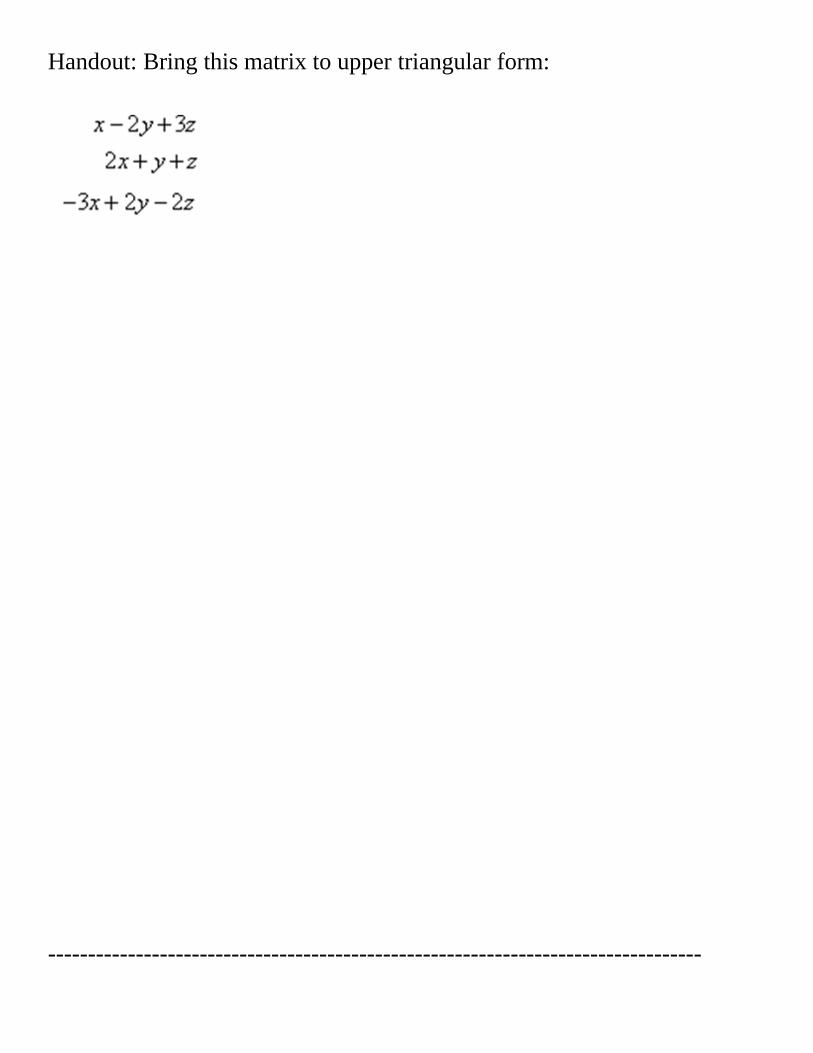
Handout: Bring this matrix to upper triangular form:
----------------------------------------------------------------------------------
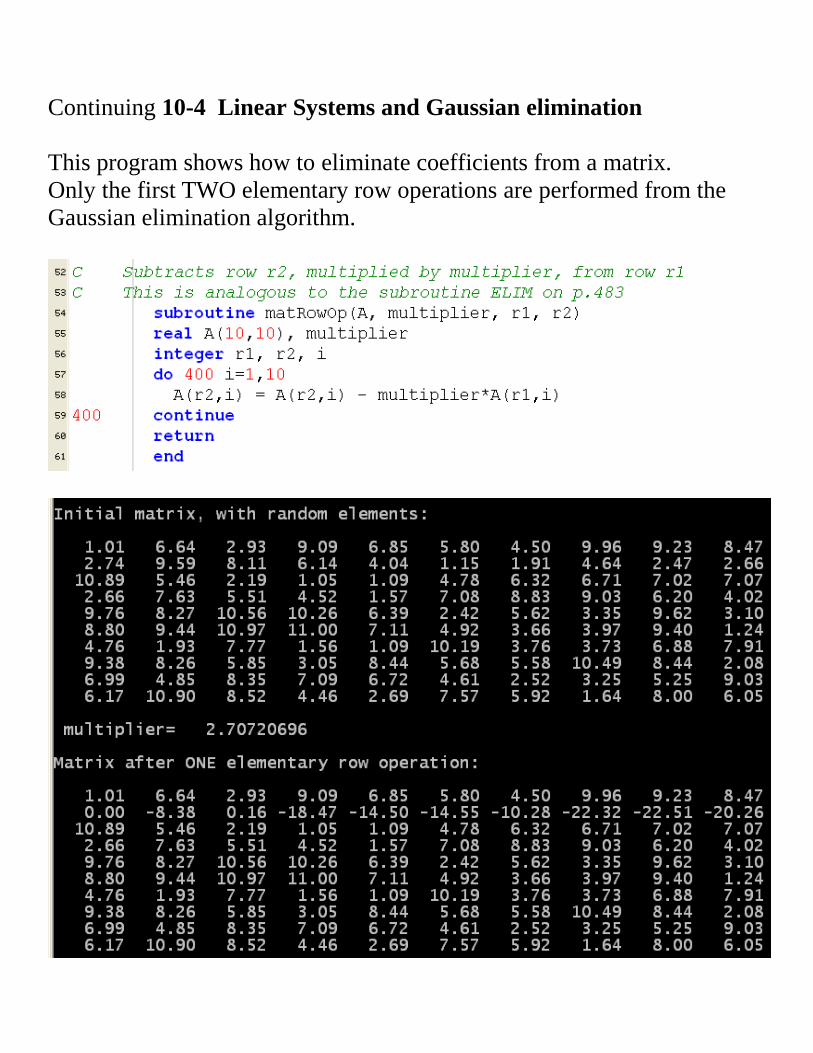
Continuing 10-4 Linear Systems and Gaussian elimination
This program shows how to eliminate coefficients from a matrix.
Only the first TWO elementary row operations are performed from the
Gaussian elimination algorithm.
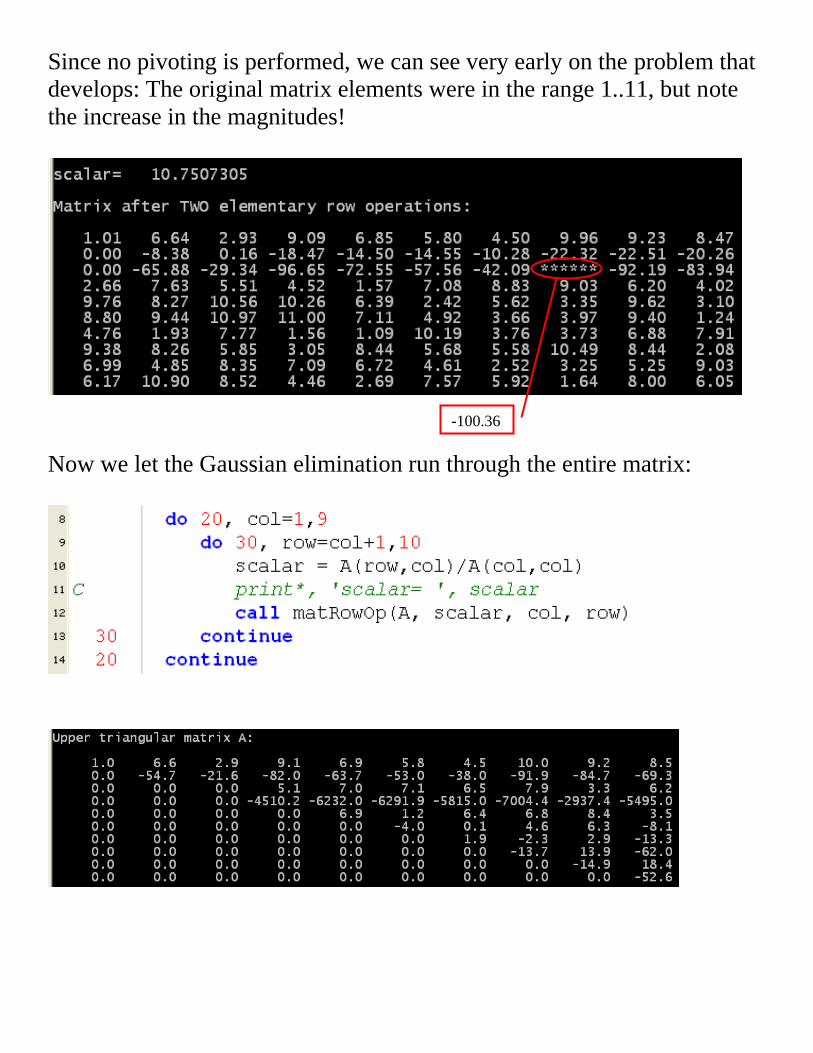
Since no pivoting is performed, we can see very early on the problem that
develops: The original matrix elements were in the range 1..11, but note
the increase in the magnitudes!
Now we let the Gaussian elimination run through the entire matrix:
-100.36
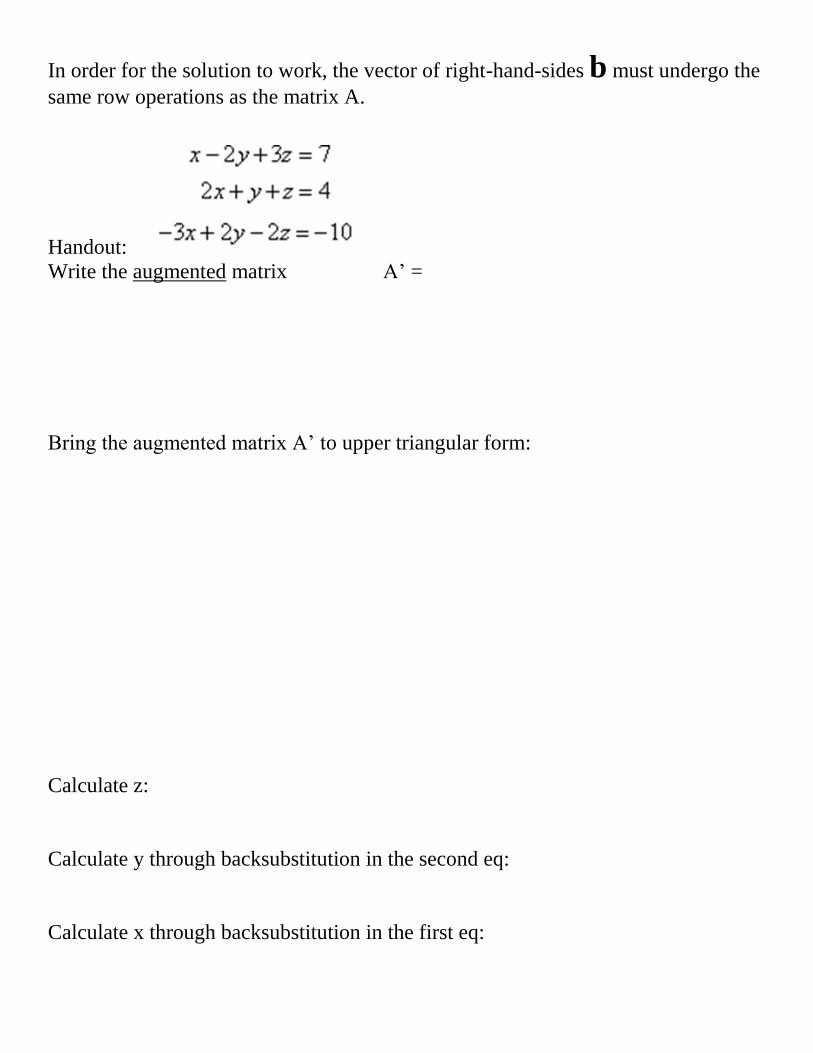
In order for the solution to work, the vector of right-hand-sides b must undergo the
same row operations as the matrix A.
Handout: Write the augmented matrix A’ =
Bring the augmented matrix A’ to upper triangular form:
Calculate z:
Calculate y through backsubstitution in the second eq:
Calculate x through backsubstitution in the first eq:
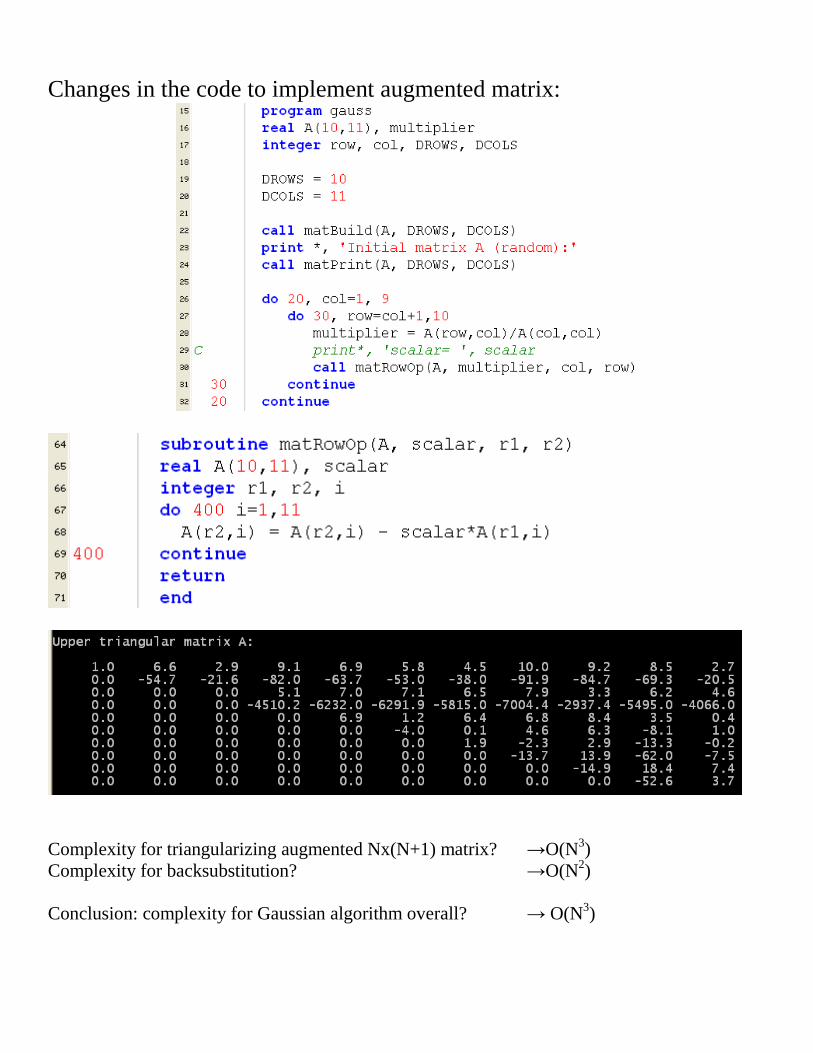
Changes in the code to implement augmented matrix:
Complexity for triangularizing augmented Nx(N+1) matrix? →O(N3)
Complexity for backsubstitution? →O(N2)
Conclusion: complexity for Gaussian algorithm overall? → O(N3)
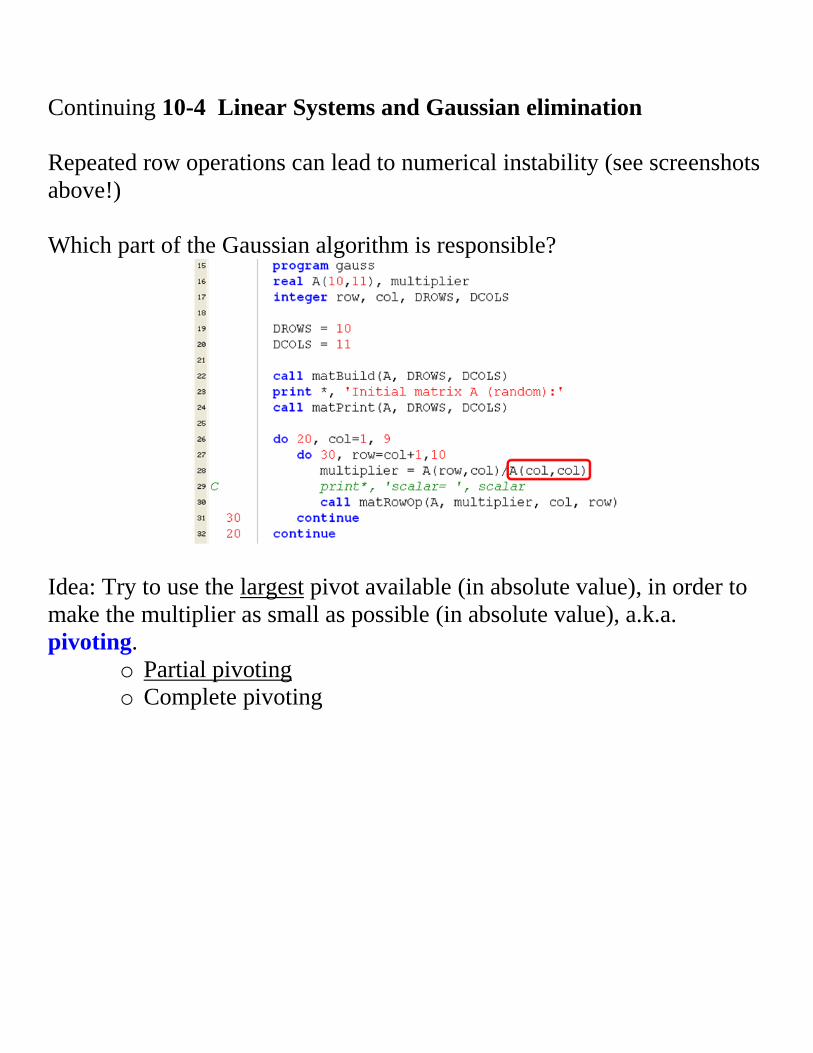
Continuing 10-4 Linear Systems and Gaussian elimination
Repeated row operations can lead to numerical instability (see screenshots
above!)
Which part of the Gaussian algorithm is responsible?
Idea: Try to use the largest pivot available (in absolute value), in order to
make the multiplier as small as possible (in absolute value), a.k.a.
pivoting.
o Partial pivoting
o Complete pivoting

New code for partial pivoting:
And finally the payoff:
Since each column has one
and only one pivot, I’m
renaming the column index
PIVOT
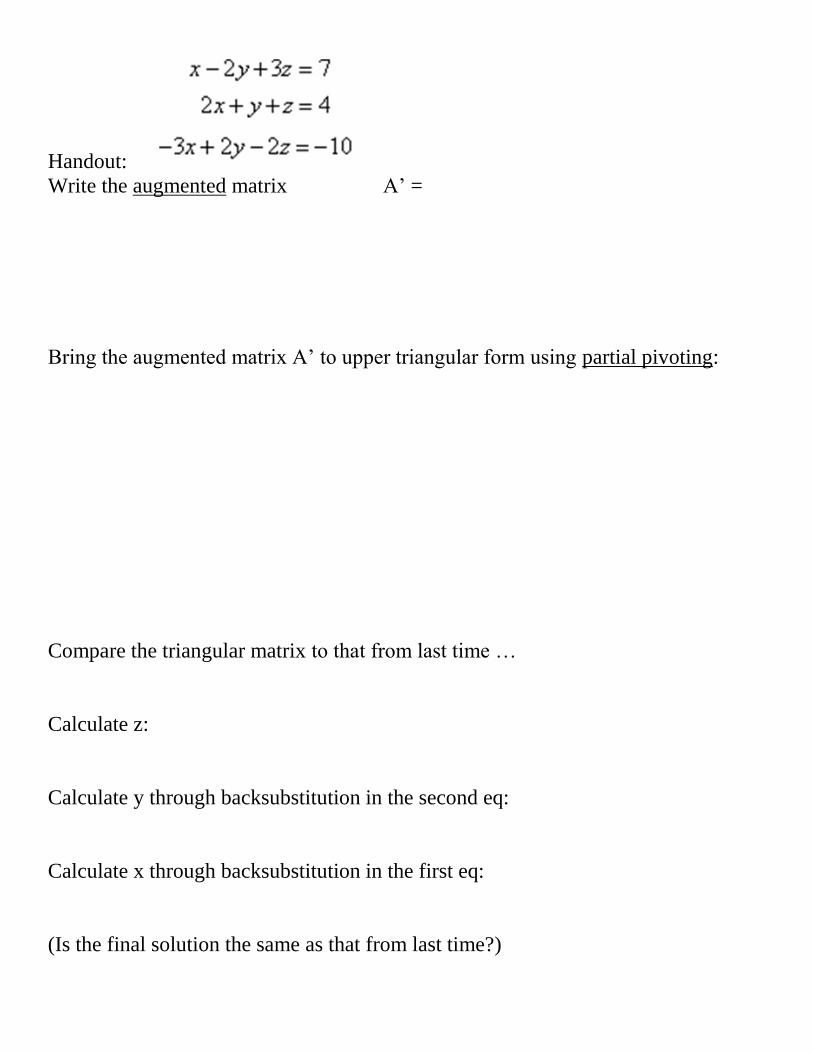
Handout: Write the augmented matrix A’ =
Bring the augmented matrix A’ to upper triangular form using partial pivoting:
Compare the triangular matrix to that from last time …
Calculate z:
Calculate y through backsubstitution in the second eq:
Calculate x through backsubstitution in the first eq:
(Is the final solution the same as that from last time?)
Individual work for next time: Solve in notebook the Hand Example on
pp.479-480.
How about total pivoting? … Swapping columns can lead to an even larger pivot, but the price
to pay is that the unknowns get swapped, too. We have to keep track of these swaps, and un-
swap the solution vector at the end.
Empirical conclusion: partial pivoting is good enough in most practical problems. If the matrix
A is particularly ill-conditioned, we can work a little harder and do complete pivoting.
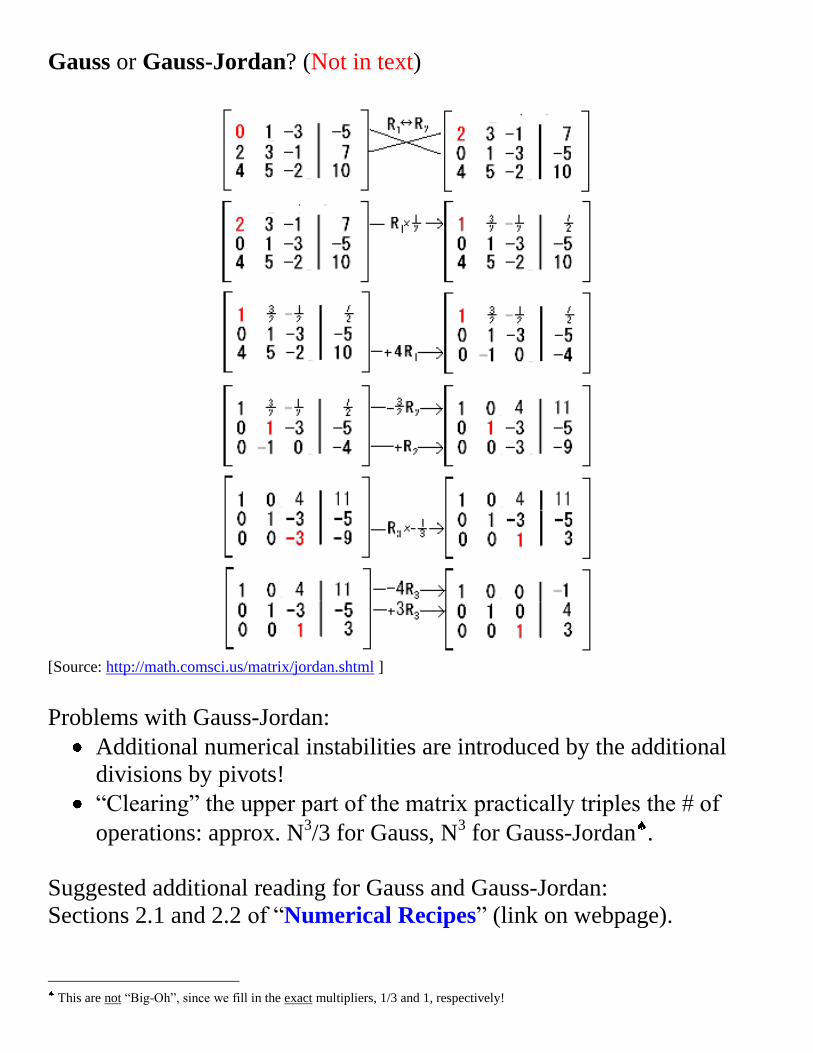
Gauss or Gauss-Jordan? (Not in text)
[Source: http://math.comsci.us/matrix/jordan.shtml ]
Problems with Gauss-Jordan:
Additional numerical instabilities are introduced by the additional
divisions by pivots!
“Clearing” the upper part of the matrix practically triples the # of
operations: approx. N3/3 for Gauss, N3 for Gauss-Jordan .
Suggested additional reading for Gauss and Gauss-Jordan:
Sections 2.1 and 2.2 of “Numerical Recipes” (link on webpage).
This are not “Big-Oh”, since we fill in the exact multipliers, 1/3 and 1, respectively!
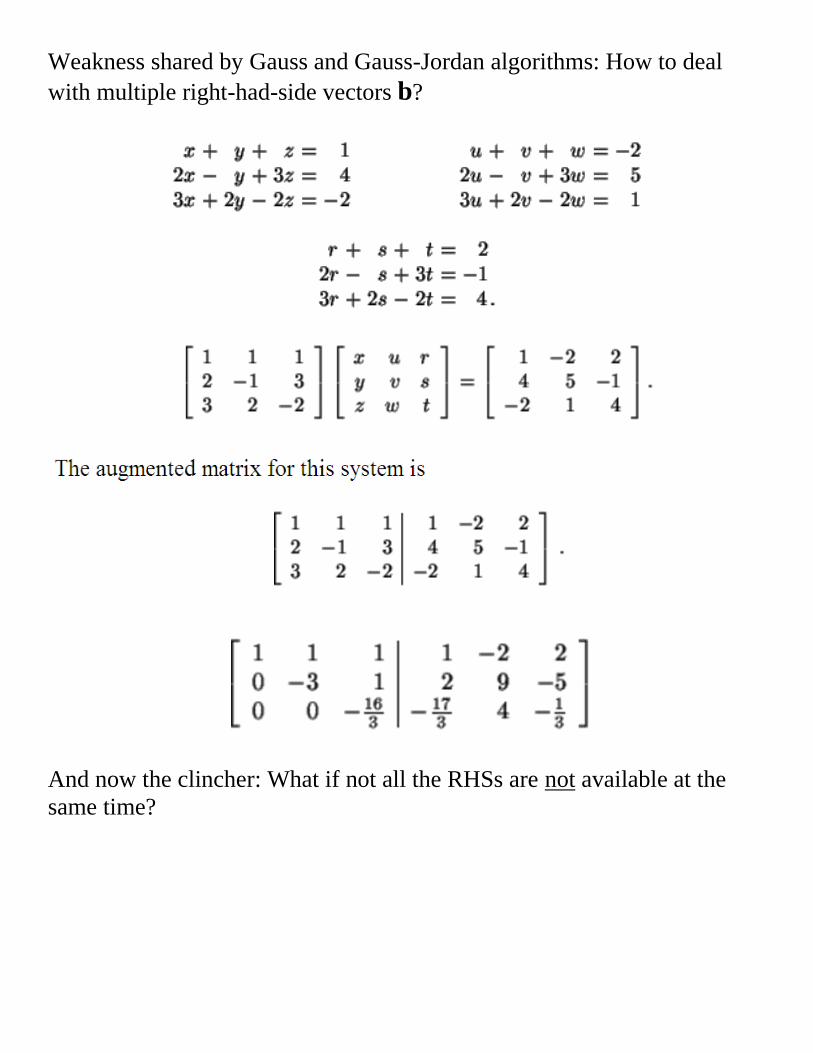
Weakness shared by Gauss and Gauss-Jordan algorithms: How to deal
with multiple right-had-side vectors b?
And now the clincher: What if not all the RHSs are not available at the
same time?
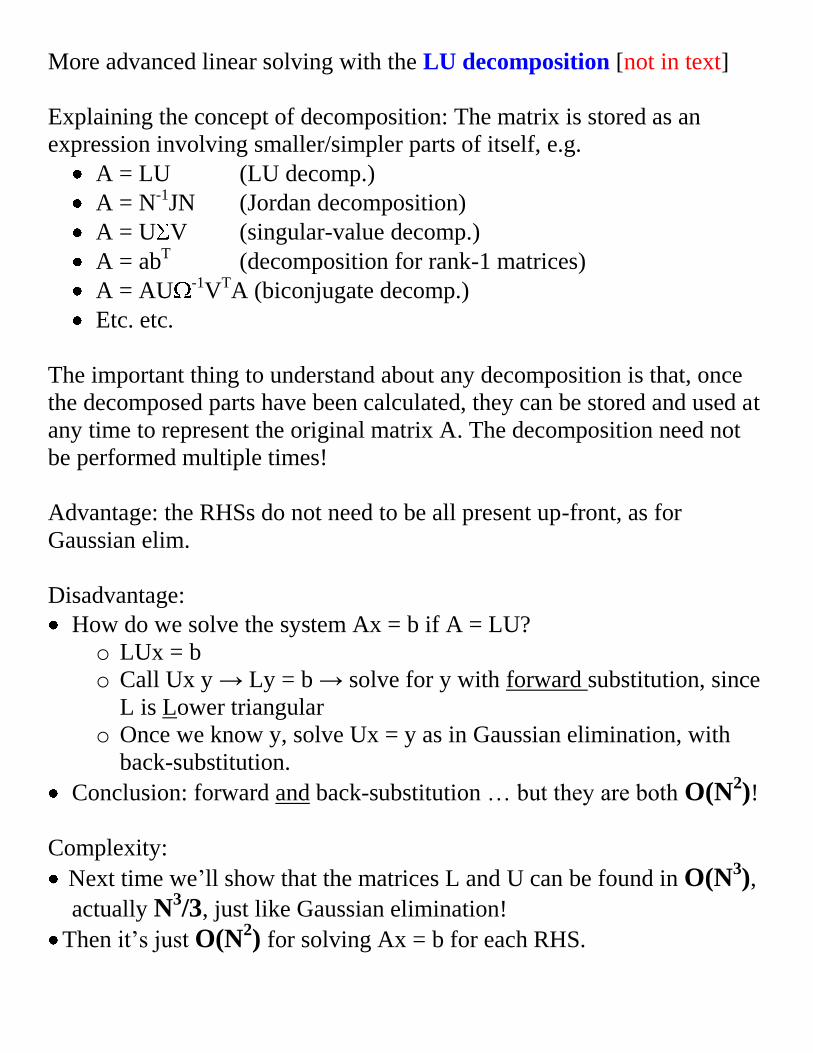
More advanced linear solving with the LU decomposition [not in text]
Explaining the concept of decomposition: The matrix is stored as an
expression involving smaller/simpler parts of itself, e.g.
A = LU (LU decomp.)
A = N-1JN (Jordan decomposition)
A = U V (singular-value decomp.)
A = abT (decomposition for rank-1 matrices)
A = AU -1VTA (biconjugate decomp.)
Etc. etc.
The important thing to understand about any decomposition is that, once
the decomposed parts have been calculated, they can be stored and used at
any time to represent the original matrix A. The decomposition need not
be performed multiple times!
Advantage: the RHSs do not need to be all present up-front, as for
Gaussian elim.
Disadvantage:
How do we solve the system Ax = b if A = LU?
o LUx = b
o Call Ux y → Ly = b → solve for y with forward substitution, since
L is Lower triangular
o Once we know y, solve Ux = y as in Gaussian elimination, with
back-substitution.
Conclusion: forward and back-substitution … but they are both O(N2)!
Complexity:
Next time we’ll show that the matrices L and U can be found in O(N3),
actually N3/3, just like Gaussian elimination!
Then it’s just O(N2) for solving Ax = b for each RHS.
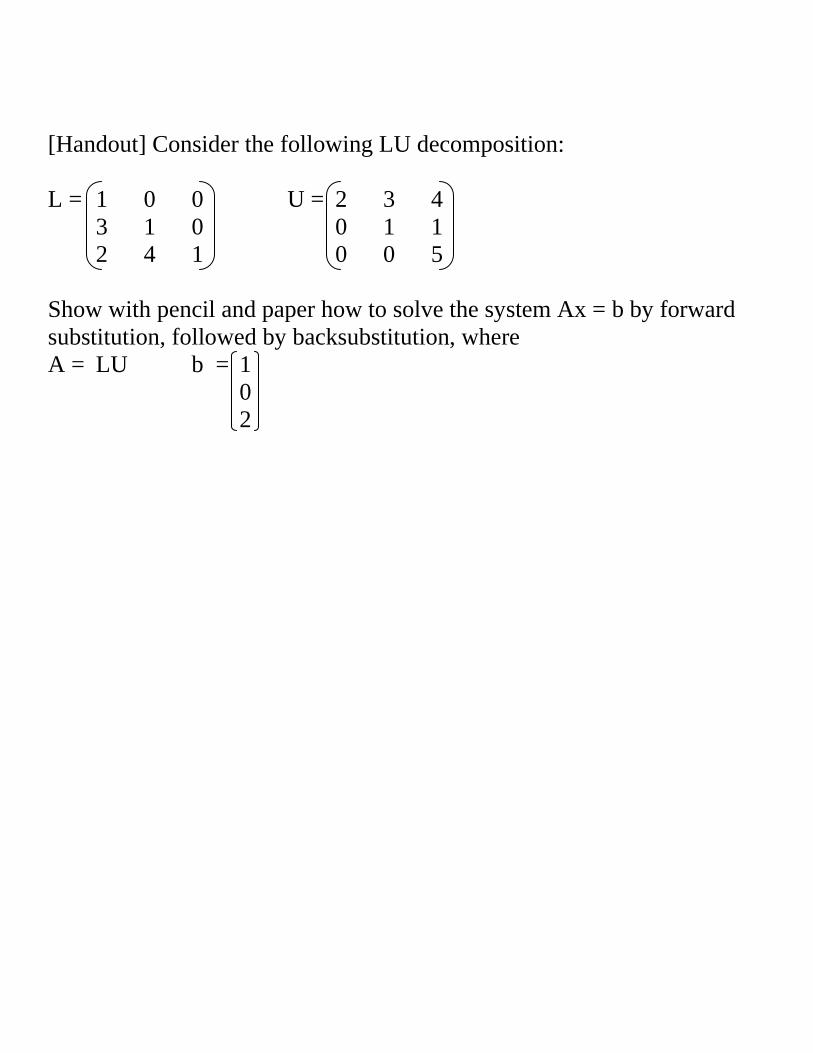
[Handout] Consider the following LU decomposition:
L = 1 0 0 U = 2 3 4
3 1 0 0 1 1
2 4 1 0 0 5
Show with pencil and paper how to solve the system Ax = b by forward
substitution, followed by backsubstitution, where
A = LU b = 1
0
2
A note on L’s diagonal:
L and U together have N2 + N non-zero elements. Because the original A
has only N2, we can choose the remaining N freely. Most implementations
of LU decomp. choose to make all diag. elements of L ones. In this case,
we don’t even need two matrices, we can store both L and U in place in
the old matrix A!
Recommended reading:
Section 2.3 of Numerical Recipes (link on webpage)
Wikipedia article (link on webpage)
------------------------------------------------------------------------------