THE INFLUENCE OF HEEL ON THE BARE HULL...
10
The Second International Conference on Innovation in High Performance Sailing Yachts, Lorient, France © 2010: Royal Institution of Naval Architects THE INFLUENCE OF HEEL ON THE BARE HULL RESISTANCE OF A SAILING YACHT J. A. Keuning, and M. Katgert. Delft University of Technology NOMENCLATURE Lwl Waterline length Bwl Beam on waterline Tc Draft of canoe body LCB Longitudinal center of buoyancy Cm Midship section coefficient Sc Wetted area canoe body ∇c Volume of displacement canoe body φ Heel angle Rr Residuary resistance Ri Induced resistance FH Sideforce Cv Coefficient of viscous drag Cf Coefficient of frictional drag k Form factor ρ Specific gravity g Gravitational acceleration Rn Reynolds number 1. INTRODUCTION For the useful prediction of the performance of a sailing yacht using a generic Velocity Prediction Program (VPP) an accurate assessment of the hydrodynamic and aerodynamic forces and moments involved is essential. In a so called “generic VPP”, which yields an easy to run and rapid performance prediction of an arbitrary sailing yacht using its main dimensions only, this assessment is even more complicated due to the limited data of the yacht available in that case. Extensive research has been carried out over the last decades by numerous parties to find general applicable expressions for sail forces, upright resistance, appendage resistance, side force, induced resistance, added resistance in waves etcetera etcetera. With the transition from expressions yielding the forces and moments on the complete yacht, as was the case in the beginning of the DSYHS, to generic expressions for hull, keel and rudder separately all contributions of the various parts of the yacht on the overall forces and moments had to be formulated. One of the more difficult components in this assessment scheme turned out to be the change in resistance due to the stationary heel of the sailing yacht. Various attempts to “capture” this change have been made but they seem to lack either general applicability or accuracy. Yet this heeled resistance and more in particular the change in residuary resistance due to heel, has formed an important item for a long time on the research agenda of, amongst others, the International Technical Committee of the ORC. And in some respect it certainly has been a driver for the hull shapes of new designs. In the present paper an attempt will be made to present an overview of what has been done in this respect over the last decade using the data of the Delft Systematic Yacht Hull Series (DSYHS) and, using the same data, try to gain some insight on the absolute contribution of the heeled resistance on the overall performance and the physical effects driving it. 2. WHAT CHANGES UNDER HEEL? If we consider the difference between an upright sailing yacht hull and the same hull under 20 degrees of heel, which are the obvious differences? From a geometric point of view the shape of the underwater body changes considerably. The waterlines become highly asymmetric and the section shape changes accordingly. The amount to which these changes take place appears to be dependent on a number of the shape parameters of the hull under consideration. This change of geometry of the hull under heel is to some extent demonstrated in the next figures, in which for a small, but illustrative, number of models of the DSYHS both the waterlines upright and under 20 degrees of heel are compared. The differences between the various models that are shown are: Figure 1.1: Waterlines Sysser 1 1) Sysser 1, being the parent model of the Series 1 of the DSYHS has a typical wine glass shaped cross section as customary in the 1970’s with a modest Beam to Draft (B/T) ratio. In addition the fore and aft body are rather identical leading to a symmetrical hull and rather steep buttocks aft. Under heel the “windward” waterlines
Transcript of THE INFLUENCE OF HEEL ON THE BARE HULL...

The Second International Conference on Innovation in High Performance Sailing Yachts, Lorient, France
© 2010: Royal Institution of Naval Architects
THE INFLUENCE OF HEEL ON THE BARE HULL RESISTANCE OF A SAILING YACHT J. A. Keuning, and M. Katgert. Delft University of Technology NOMENCLATURE Lwl Waterline length Bwl Beam on waterline Tc Draft of canoe body LCB Longitudinal center of buoyancy Cm Midship section coefficient Sc Wetted area canoe body ∇c Volume of displacement canoe body φ Heel angle Rr Residuary resistance Ri Induced resistance FH Sideforce Cv Coefficient of viscous drag Cf Coefficient of frictional drag k Form factor ρ Specific gravity g Gravitational acceleration Rn Reynolds number 1. INTRODUCTION For the useful prediction of the performance of a sailing yacht using a generic Velocity Prediction Program (VPP) an accurate assessment of the hydrodynamic and aerodynamic forces and moments involved is essential. In a so called “generic VPP”, which yields an easy to run and rapid performance prediction of an arbitrary sailing yacht using its main dimensions only, this assessment is even more complicated due to the limited data of the yacht available in that case. Extensive research has been carried out over the last decades by numerous parties to find general applicable expressions for sail forces, upright resistance, appendage resistance, side force, induced resistance, added resistance in waves etcetera etcetera. With the transition from expressions yielding the forces and moments on the complete yacht, as was the case in the beginning of the DSYHS, to generic expressions for hull, keel and rudder separately all contributions of the various parts of the yacht on the overall forces and moments had to be formulated. One of the more difficult components in this assessment scheme turned out to be the change in resistance due to the stationary heel of the sailing yacht. Various attempts to “capture” this change have been made but they seem to lack either general applicability or accuracy. Yet this heeled resistance and more in particular the change in residuary resistance due to heel, has formed an important item for a long time on the research agenda of, amongst others, the International Technical Committee of the ORC. And in some respect it
certainly has been a driver for the hull shapes of new designs. In the present paper an attempt will be made to present an overview of what has been done in this respect over the last decade using the data of the Delft Systematic Yacht Hull Series (DSYHS) and, using the same data, try to gain some insight on the absolute contribution of the heeled resistance on the overall performance and the physical effects driving it. 2. WHAT CHANGES UNDER HEEL? If we consider the difference between an upright sailing yacht hull and the same hull under 20 degrees of heel, which are the obvious differences? From a geometric point of view the shape of the underwater body changes considerably. The waterlines become highly asymmetric and the section shape changes accordingly. The amount to which these changes take place appears to be dependent on a number of the shape parameters of the hull under consideration. This change of geometry of the hull under heel is to some extent demonstrated in the next figures, in which for a small, but illustrative, number of models of the DSYHS both the waterlines upright and under 20 degrees of heel are compared. The differences between the various models that are shown are:
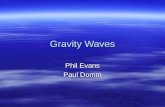
Figure 1.1: Waterlines Sysser 1 1) Sysser 1, being the parent model of the Series 1 of the DSYHS has a typical wine glass shaped cross section as customary in the 1970’s with a modest Beam to Draft (B/T) ratio. In addition the fore and aft body are rather identical leading to a symmetrical hull and rather steep buttocks aft. Under heel the “windward” waterlines

The Second International Conference on Innovation in High Performance Sailing Yachts, Lorient, France
© 2010: Royal Institution of Naval Architects
become quite narrow and stretched and the “leeward” lines bulk-out with increasing waterline entrance angle fore and a blunt aft body. There is a decrease in waterline length under heel, which appears to be symptomatic for all models in Series 1.
Figure 1.2: Waterlines Sysser 25 2) Sysser 25, being the parent model of Series 2 of the DSYHS, has the more customary shape of the yachts of the 1980’s. The cross sections are much more U shaped with a higher Cm value when compared with Sysser 1. The L/B ratio is smaller than Sysser 1, the B/T ratio is almost similar however there is a considerable asymmetry in the fore and aft lines leading to a much fuller shape of the waterlines and smaller buttock angles aft. Under heel the most striking feature of this type of hull shape is the apparent change in centreline of the hull: aft it shifts to leeward or it “rotates”. The asymmetry between windward and leeward is less than with Sysser 1 and compared with the shifted centreline the leeward side now becomes slightly more stretched and the windward side more bulky. The length of the “shifted” or “rotated” water-(centre-) line increases considerably when under heel and this shows to be consistent for all models derived from this parent.
Figure 1.3: Waterlines Sysser 27
Figure 1.4: Waterlines Sysser 29
3) These effects become smaller with decreasing B/T ratio as is shown with the lines of Sysser 27, which is a very low B/T ratio hull derived from the same lines as Sysser 25, and they increase with increasing B/T ratio, as shown with the lines from Sysser 29, which is a very high B/T ratio hull again also derived from Sysser 25 as a parent. Also the waterline separation at the leeward side decreases strongly with increasing B/T ratio as becomes obvious from comparison between #27, #25 and #29 with increasing B/T ratio. Also a trend for increasing curvature in the shifted centreline becomes apparent.
Figure 1.5: Waterlines Sysser 44 4) With the lines of Sysser 44, which is the parent of Series 4 of the DSYHS, the largest difference with the earlier effects appears to be in the more rounded end of the waterlines aft and the smaller difference in shape between the windward and the leeward waterlines. The parent of Series 4 has again a somewhat higher Cm than the parent of Series 2 and a lower Length to Beam ratio.
Figure 1.6: Waterlines Sysser 47 5) The lines of Sysser 47, which is a high B/T derivative of Sysser 44, show a larger rotation of the centre line and an even larger increase in length under heel. The effect of more rounded waterlines aft under heel disappears however completely with this Sysser 47, due to the high B/T.

The Second International Conference on Innovation in High Performance Sailing Yachts, Lorient, France
© 2010: Royal Institution of Naval Architects
Figure 1.7: Waterlines Sysser 81 6) Finally Sysser 81. This is a modern and recent hull designed for gaining extra length under heel, appropriately nicknamed “the Boxy”. It has a very high Cm and almost vertical sides. The change of shape is obvious from the plot above.
Sys Cm Bwl/Tc 0° 20° 0° 20°
1 0.646 0.733 3.99 4.16 25 0.727 0.695 5.39 4.33 27 0.724 0.718 2.46 2.55 29 0.751 0.636 10.87 5.04 44 0.712 0.703 4.42 3.98 47 0.749 0.658 6.04 4.56 81 0.783 0.679 5.82 4.11 82 0.770 0.685 6.19 4.19 Sys Lwl
0° 20° 1 10 9.735
25 10 10.267 27 10 10.174 29 10 10.306 44 10 10.142 47 10 10.708 81 10 10.703 82 10 10.770
Table 1: Hull parameters upright and heeled These changes of hull geometry under heel provoke a number of changes in the hydrodynamics involved: A) First of all the waterline length under heel is changed. It is interesting to note that all the models of Series 1 experience a reduction in waterline length under heel while in the other Series the waterline length increases. When the changes in waterline length were calculated for a typical heeling angle of 20 degrees it became obvious that those hulls that have the biggest decrease ( i.e. change) of the mid ship sectional coefficient Cm when heeled do have the largest increase in waterline length. This also holds true the other way around. This dependency is derived from the results as presented in Table 1 in which the principal hull
parameters upright and under 20 degrees of heel are presented. A second dependency was found with the change in the B/T ratio of the hull when heeled yielding a larger increase in length when the change in the B/T ratio is larger when Cm is the unchanged. Only the more illustrative examples within the DSYHS are presented in the Table 1. This result was used to formulate the parameters of importance for the change in waterline length when heeled and by means of regression the following relation has been found for the waterline length change as function of the change in mid ship sectional coefficient Cm and the Beam to Draft ratio:
0 1 2Lwl Bwla a Cm aLwl Tc
ϕ= + ⋅Δ + ⋅Δ
with:
Cm Cm CmBwl Bwl BwlTc Tc Tc
ϕϕϕ
Δ = −
Δ = −
With the following coefficients:
φ a0 a1 a2 20° 1.020 -0.541 0.008
Table 2: Coefficients heeled waterline length regression The goodness of fit of this polynomial with the data is shown in the next figure:
9.6 9.8 10 10.2 10.4 10.6 10.8
9.6
9.8
10
10.2
10.4
10.6
10.8
Lwlφ measured [m]
Lwl φ
cal
cula
ted
[m]
Figure 2: Waterline length under heel measured and calculated How this change in waterline length may be incorporated in dealing with the resistance under heel will be discussed later. B) Secondly the magnitude of the wetted area of the hull when she heels over is changed. Since the frictional resistance is assumed to be directly proportional to the wetted area, every change in wetted

The Second International Conference on Innovation in High Performance Sailing Yachts, Lorient, France
© 2010: Royal Institution of Naval Architects
area leads to a proportional change in the frictional resistance. To visualize this in Figure 3 the change in wetted area is depicted of some representative models of the DSYHS.
0 5 10 15 20 25 3012
14
16
18
20
22
24
Heel angle φ [deg]
Sc
[m2 ]
25272981Calc.
Figure 3: wetted area canoe body under heel From these results it may be concluded that there is a strong relationship between the change in wetted area and the beam to draft ratio B/T of the hull and Cm. In 1998 Keuning and Sonnenberg Ref [1] presented a polynomial expression for the wetted area of the hull under heel, which is found to be still rather accurate also when applied on the new designs. It reads: ( )
13
120.651.97 0.171 BwlSc c Lwl
Tc Cm⎛ ⎞ ⎛ ⎞= + ⋅ ⋅ ⋅ ∇ ⋅⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
2
0 1 21( 0) 100
3
1Bwl Bwls s s
Sc Sc Tc Tcs Cm
ϕϕ =
⎛ ⎞⎛ ⎞⎛ ⎞⎜ ⎟+ ⋅ + ⋅⎜ ⎟⎜ ⎟= ⋅ + ⋅ ⎝ ⎠⎜ ⎟⎜ ⎟⎜ ⎜ ⎟⎟+ ⋅⎝ ⎠⎝ ⎠
C) When considered appropriate a form factor k can be applied to get from the frictional resistance to the viscous resistance. The general applied formulation of the ITTC can be applied in this respect. According to:
2
(1 )0.075
(log(Rn) 2)
Cv k Cf
Cf
= + ⋅
=−
The usual procedure from either Prohaska or ITTC can be applied to obtain the form factor k from the experimental results at the lower speeds. Because the shape of the underwater part of the hull changes considerably when the hull is heeled it may be expected that this form factor k will change also under heel. It has been proven to be however quite difficult to derive a reliable form factor k from the measurements with the heeled bare hull. This is due to the fact that the heeled hull through its asymmetry delivers also some side force.
In addition due to the “rotation” of the centre line when heeled as demonstrated in the lines plans also an “effective” leeway angle is introduced even with zero geometrical leeway for the model, which was demonstrated by Keuning and Verwerft in Ref [3]. Although the overall side force on the heeled hull may be small there is a considerable yaw moment, due to the positive side force on the fore part and the negative side force on the aft part of the heeled hull. This particular side force distribution over the length of the heeled hull with relative small leeway angles is generally known as “the Munk moment” and results in a small total side force but introduces a large yaw moment. This has been shown by Keuning and Vermeulen in Ref [2]. This side force generation causes vorticity, which will be considerable because the hull is a highly inefficient wing, and so there will be an induced resistance component. This should not be included in the determination of the form factor k but is difficult if not impossible to separate. So generally the form factor obtained in the upright condition will be used instead. However the often quite large change in wetted area when heeled will generally dominate the small change in viscous resistance and therefore possible errors in the changes of the form factor of the heeled hull will have less influence. So the change in viscous resistance can reasonably accurate be predicted and therefore the emphasis in the following parts will be on the determination of the change in residuary resistance under heel. To establish some insight in the absolute and relative magnitude of the change in residuary resistance of a heeled hull for a limited number of the models of the DSYHS for some speeds in the speed range from Fn = 0.25 to Fn = 0.45 in the next figure the following quantities are presented: the frictional resistance under heel, the residuary resistance upright and the change in residuary resistance due to heel.
0.25 0.3 0.35 0.4 0.45-20
0
20
40
60
80
100
Sys 1
Fn [-]
Res
ista
nce
as %
of R
t φ
RfφRrδRrφRtφ

The Second International Conference on Innovation in High Performance Sailing Yachts, Lorient, France
© 2010: Royal Institution of Naval Architects
0.25 0.3 0.35 0.4 0.45-20
0
20
40
60
80
100
Sys 25
Fn [-]
Res
ista
nce
as %
of R
t φ
RfφRrδRrφRtφ
0.25 0.3 0.35 0.4 0.45-20
0
20
40
60
80
100
Sys 27
Fn [-]
Res
ista
nce
as %
of R
t φ
RfφRrδRrφRtφ
0.25 0.3 0.35 0.4 0.45-20
0
20
40
60
80
100
Sys 29
Fn [-]
Res
ista
nce
as %
of R
t φ
RfφRrδRrφRtφ
0.25 0.3 0.35 0.4 0.45-20
0
20
40
60
80
100
Sys 44
Fn [-]
Res
ista
nce
as %
of R
t φ
RfφRrδRrφRtφ
0.25 0.3 0.35 0.4 0.45-20
0
20
40
60
80
100
Sys 47
Fn [-]
Res
ista
nce
as %
of R
t φ
RfφRrδRrφRtφ
0.25 0.3 0.35 0.4 0.45-20
0
20
40
60
80
100
Sys 81
Fn [-]
Res
ista
nce
as %
of R
t φ
RfφRrδRrφRtφ
Figure 4: Relative contribution of resistance components to heeled bare hull resistance The data presented here is representative for the entire series of models in the DSYHS database. From these plots it is obvious that the change in residuary resistance due to heel is a small quantity when compared to the other components. In addition it should be noted that the change in the residuary resistance due to heel has to be determined from the measurements by subtracting two rather large quantities, i.e. the resistance upright and the resistance under heel, to find the (small) difference. Small errors in either of these two large quantities will inevitably lead to large errors in their “delta”: the change in residuary resistance due to heel. This may lead to all kind of irregularities in the “measured” change of residuary resistance due to heel. In Ref [2] and [3] it is also shown that depending on the B/T ratio of the hull there is also a considerable side force production of the sailing yacht at zero leeway angle which generates an even larger induced resistance component on the actual sailing yacht. This is shown in Figure 4 in which for two different B/T ratios the induced resistance due to heel and side force is depicted. This effect will make the importance of the change of residuary resistance of the bare hull due to heel on the overall resistance of the actual sailing yacht even smaller.

The Second International Conference on Innovation in High Performance Sailing Yachts, Lorient, France
© 2010: Royal Institution of Naval Architects
0
250
500
750
1000
0 5 10 15 20 25FH2 [kN2]
Ri [
N]
Sys 24 (B/T=11) Fn 0.36Sys 27 (B/T=2.5) Fn 0.36
Figure 5: Induced resistance Ri due to sideforce for various B/T 3. VARIOUS APPROACHES FOR THE
CHANGE IN RESIDUARY RESISTANCE UNDER HEEL
In 1998 Keuning and Sonnenberg Ref [1] formulated an expression for the change in resistance due to heel based on the results of about 25 models out of the total of 50 models of the DSYHS tested at that time. These tests were carried out using the unappended models of the DSYHS. The heel angle tested was restricted to one heel angle only, i.e. 20 degrees of heel. The database where they based their regression on was the raw database from the DSYHS available at that moment. This database contained 50 models of which only 25 had been tested as bare hulls at 20 degrees of heel. Using the raw database results means that no “fairing” or “smoothing” has been performed on any of the resistance data, not upright nor under heel. This implied that, as explained before, quite some humps and hollows appear in the small differential of these two large quantities that is the change in resistance due to heel. A typical example of this is depicted in Figure 6.
-400
-200
0
200
400
600
800
1000
dRrh
phi2
0 [N
]
0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 Fn
1
25
29
50
1
25
29
50
Delta Resist. Bare Hull due 20° heelMeasured & Calculated 10 m Lwl meas:
calc:
Figure 6: Change in residuary resistance under heel measured and calculated from Ref [1] Based on these results in the database available at that time they formulated the following expression for the
specific change in residuary resistance due to 20 degrees of heel:
2
200 1 2 3
24 5
Rrh Lwl Bwl Bwlu u u uc g Bwl Tc Tc
u LCB u LCB
ϕ
ρ= °Δ ⎛ ⎞= + ⋅ + ⋅ + ⋅⎜ ⎟∇ ⋅ ⋅ ⎝ ⎠
+ ⋅ + ⋅
With a dependency on the heeling angle to yield a similar result for any arbitrary heeling angle between zero and 30 degrees of heel according to: 1.7
20 6.0Rrh Rrhϕ ϕ ϕ= °Δ = Δ ⋅ ⋅ This is a speed independent polynomial expression with coefficients presented for a fixed series of Froude numbers. This is similar to the approach followed with the upright residuary polynomial expression derived from the DSYHS. The coefficients of this polynomial expression, i.e. u0 till u5, are presented in Table 3. Coefficients multiplied by 1000
Fn 0.25 0.3 0.35 0.4 0.45 0.5 0.55
u0 -0.0268 0.6628 1.6433 -0.8659 -3.2715 -0.1976 1.5873
u1 -0.0014 -0.0632 -0.2144 -0.0354 0.1372 -0.148 -0.3749
u2 -0.0057 -0.0699 -0.164 0.2226 0.5547 -0.6593 -0.7105
u3 0.0016 0.0069 0.0199 0.0188 0.0268 0.1862 0.2146
u4 -0.007 0.0459 -0.054 -0.58 -1.0064 -0.7489 -0.4818
u5 -0.0017 -0.0004 -0.0268 -0.1133 -0.2026 -0.1648 -0.1174
Table 3: coefficients regression delta residual resistance under heel Keuning & Sonnenberg Ref [1] These formulations, when checked against the DSYHS database, showed reasonable results. When validated against models not belonging to the database the results still showed satisfactory agreement at least when care is taken not to be outside the parameters space spanned by the DSYHS. Quite another approach is followed by the ORC in their VPP used for handicapping purposes. Here a multiplier on the upright residuary resistance is formulated depending on the principal hull parameters such as length to beam, beam to draft and change of waterplane area upright and under heel. Their approach is explained in the ORC VPP documentation 2009 Ref [4]. This formulation obviously has some flaws also because the ITC is seriously looking for another approach. 4. THE PRESENT APPROACH In the framework of the present study two new attempts have been made to improve on the assessment of the change in residuary resistance due to heel of the bare hull: First it has been investigated if fairing the results from the measurements and so reducing the abnormalities in

The Second International Conference on Innovation in High Performance Sailing Yachts, Lorient, France
© 2010: Royal Institution of Naval Architects
the data had any effect on the derived coefficients for the polynomial expression as presented by Keuning and Sonnenberg Ref [1] and if so if the results were improved. Two approaches regarding this fairing procedure have been followed in this respect. The first one was fairing the residuary resistance curves both upright and heeled. The change in resistance was then determined from the difference between these two faired curves at fixed Froude numbers. The other approach was that the difference as originally determined by Keuning and Sonnenberg was faired directly. It turned out that both procedures did not yield very different results, so fairing the original deltas was chosen as the method to fair the data. A typical example of this later procedure is depicted in Figure 7.
0.15 0.2 0.25 0.3 0.35 0.4 0.45-4
-2
0
2
4
6
8
10
Fn [-]
1000
⋅ΔR
r φ/ ρ⋅g⋅∇
1294481Smooth
Figure 7: measured and smoothed deltas As may be seen from this figure the overall magnitude of the delta resistance does not change much but the trend in the lines in particular over the Froude range is much more consistent. New coefficients have been determined for the same polynomial expression as formulated by Keuning and Sonnenberg Ref [1] using these new results for the delta residuary. However this did not improve the results of the assessment formulation significantly. The second attempt was focussed at gaining new insights in what or which hull shape characteristics drives this change in residuary resistance due to heel of the bare hull. If new parameters and dependencies could be found then it would be possible to formulate an appropriate expression to deal with those. Analyzing the results obtained for the change in residuary resistance after fairing these data revealed that there was a strong dependency on the change in waterline length and on top of that on the change of the Cm and the B/T ratio again. So a new formulation was set up using
the change in waterline length under heel, Cm and the B/T ratio. Once again a speed independent formulation was used with Froude number dependent coefficients. After some attempts the best formulation read:
0 1 2 3
Rr Bwl Lwlb b b Cm bg Tc Lwl
ϕ ϕρΔ
= + ⋅Δ + ⋅Δ + ⋅∇
In which:
Bwl Bwl BwlTc Tc Tc
Cm Cm Cm
ϕϕ
ϕ
Δ = −
Δ = −
with coefficients: Coefficients multiplied by 1000 Fn 0.15 0.2 0.25 0.3 0.35 0.4 0.45 b0 -1.850 -1.032 2.061 10.881 26.984 48.633 73.015b1 -0.032 0.000 -0.024 -0.163 -0.494 -1.062 -1.795b2 1.037 0.731 0.451 -0.431 -2.208 -4.344 -6.432b3 1.781 0.996 -2.046 -10.773 -26.780 -48.397 -72.799
Table 3: coefficients regression delta residual resistance under heel Keuning & Katgert 2010 When applied on the results of the database the results as depicted in the following Figure 8 were obtained. In this Figure only a limited number of the 38 models are presented. Those models are selected which show diverging behaviour with respect to the change in residuary resistance at heel. They are representative for the general result and show the general goodness of fit.
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-10
0
10
20
30
40
50
60
Fn [-]
1000
⋅Rr/ ρ
⋅g⋅∇
[-]
Sys1
Calculated ΔRrφMeasured ΔRrφMeasured Rr
φ=0°
Measured Rrφ=20°

The Second International Conference on Innovation in High Performance Sailing Yachts, Lorient, France
© 2010: Royal Institution of Naval Architects
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-10
0
10
20
30
40
50
60
Fn [-]
1000
⋅Rr/ ρ
⋅g⋅∇
[-]
Sys2
Calculated ΔRrφMeasured ΔRrφMeasured Rr
φ=0°
Measured Rrφ=20°
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-10
0
10
20
30
40
50
60
Fn [-]
1000
⋅Rr/ ρ
⋅g⋅∇
[-]
Sys18
Calculated ΔRrφMeasured ΔRrφMeasured Rr
φ=0°
Measured Rrφ=20°
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-10
0
10
20
30
40
50
60
Fn [-]
1000
⋅Rr/ ρ
⋅g⋅∇
[-]
Sys24
Calculated ΔRrφMeasured ΔRrφMeasured Rr
φ=0°
Measured Rrφ=20°
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-10
0
10
20
30
40
50
60
Fn [-]
1000
⋅Rr/ ρ
⋅g⋅∇
[-]
Sys25
Calculated ΔRrφMeasured ΔRrφMeasured Rr
φ=0°
Measured Rrφ=20°
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-10
0
10
20
30
40
50
60
Fn [-]
1000
⋅Rr/ ρ
⋅g⋅∇
[-]
Sys27
Calculated ΔRrφMeasured ΔRrφMeasured Rr
φ=0°
Measured Rrφ=20°
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-10
0
10
20
30
40
50
60
Fn [-]
1000
⋅Rr/ ρ
⋅g⋅∇
[-]
Sys29
Calculated ΔRrφMeasured ΔRrφMeasured Rr
φ=0°
Measured Rrφ=20°
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-10
0
10
20
30
40
50
60
Fn [-]
1000
⋅Rr/ ρ
⋅g⋅∇
[-]
Sys39
Calculated ΔRrφMeasured ΔRrφMeasured Rr
φ=0°
Measured Rrφ=20°
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-10
0
10
20
30
40
50
60
Fn [-]
1000
⋅Rr/ ρ
⋅g⋅∇
[-]
Sys44
Calculated ΔRrφMeasured ΔRrφMeasured Rr
φ=0°
Measured Rrφ=20°

The Second International Conference on Innovation in High Performance Sailing Yachts, Lorient, France
© 2010: Royal Institution of Naval Architects
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-10
0
10
20
30
40
50
60
Fn [-]
1000
⋅Rr/ ρ
⋅g⋅∇
[-]
Sys47
Calculated ΔRrφMeasured ΔRrφMeasured Rr
φ=0°
Measured Rrφ=20°
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-10
0
10
20
30
40
50
60
Fn [-]
1000
⋅Rr/ ρ
⋅g⋅∇
[-]
Sys49
Calculated ΔRrφMeasured ΔRrφMeasured Rr
φ=0°
Measured Rrφ=20°
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-10
0
10
20
30
40
50
60
Fn [-]
1000
⋅Rr/ ρ
⋅g⋅∇
[-]
Sys81
Calculated ΔRrφMeasured ΔRrφMeasured Rr
φ=0°
Measured Rrφ=20°
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-10
0
10
20
30
40
50
60
Fn [-]
1000
⋅Rr/ ρ
⋅g⋅∇
[-]
Sys82
Calculated ΔRrφMeasured ΔRrφMeasured Rr
φ=0°
Measured Rrφ=20°
Figure 8: results present regression
From these plots it may be concluded that in an overall view both the trend and the absolute magnitude of the change in the residuary due to heel is quite satisfactory captured. This certainly also holds true for the sign of the added resistance, i.e. positive or negative. In comparison with the earlier assessment method there is a significant improvement which justifies the use of the new method. 5. CONCLUSIONS AND
RECOMMENDATIONS Based on the results presented above it may be concluded that a more reliable method for assessing the change in residuary resistance of the bare hull under heel has been found. It seems to predict both the quantity and the trend of this change with reasonable accuracy for the range of the DSYHS. In the near future additional tests will be carried out to be able to extend the database were it is based on in those areas were we still lack information, and to be able to validate the results on models not belonging to the database of the DSYHS. 6. REFERENCES 1. Keuning, J.A. and Sonnenberg, U.B.
Approximation of the Hydrodynamic Forces on a Sailing Yachts based on the Delft Systematic Yacht Hull Series International HISWA Symposium on Yacht Design and Construction Amsterdam, November 1998
2. Keuning, J. A. and Vermeulen, K. J. The yaw balance of sailing yachts upright and heeled Chesapeake Sailing Yacht Symposium, 2003
3. Keuning, J. A. and Verwerft, B. A new Method for the Prediction of the Side Force on Keel and Rudder of a Sailing Yacht based on the Results of the Delft Systematic Yacht Hull Series Chesapeake Sailing Yacht Symposium, 2009
4. ORC VPP Documentation 2009, Published by the Offshore Racing Congress
5. Teeters, J., Pallard, R. and Muselet, C. Analysis of Hull Shape Effects on Hydrodynamic Drag in Offshore Handicap Racing Rules Chesapeake Sailing Yacht Symposium, 2003
7. AUTHORS’ BIOGRAPHIES Lex Keuning is associate professor at the Ship Hydromechanics Laboratory of the Delft University of Technology. He has been responsible for research on the Delft Systematic Yacht Hull Series and he is also research advisor of the ITC of the Ocean Racing Congress.

The Second International Conference on Innovation in High Performance Sailing Yachts, Lorient, France
© 2010: Royal Institution of Naval Architects
Michiel Katgert is member of the research staff of the Ship Hydromechanics Laboratory of the Delft University of Technology. He is responsible for carrying out towing tank research.