
Technische Mechanik Kompakt - Springer978-3-8351-9066-5/1.pdf · A.2 Drehung des Koordinatensystems...
65
Anhang A Mathematische Grundlagen A.1 Ebene Trigonometrie A.1.1 Definitionen Definition am Dreieck Die Winkelfunktionen entsprechen dem Verh¨ altnis der Seiten in einem recht- winkligen Dreieck. c b A B a α β C Bild A.1 Winkelfunktionen am rechtwinkligen Dreieck Mit den in Bild A.1 festgelegten Bezeichnungen gilt beispielsweise f¨ ur den Win- kel α: Sinus = Gegenkathete Hypotenuse sin α = a c Cosinus = Ankathete Hypotenuse cos α = b c Tangens = Gegenkathete Ankathete tan α = a b Cotangens = Ankathete Gegenkathete cot α = b a (A.1) Winkelfunktionen am Kreis Die Definition am Dreieck l¨ asst sich am Kreis f¨ ur große Winkel erweitern. Die Koordinaten des Punktes P in Bild A.2 auf einem Kreis mit dem Radi- us r lassen sich mit den Winkelfunktionen ausdr¨ ucken, dies gilt auch f¨ ur Win- P. Wriggers, et al., Technische Mechanik kompakt, DOI 10.1007/978-3-8351-9066-5, © B. G. Teubner Verlag / GWV Fachverlage GmbH, Wiesbaden 2006
Transcript of Technische Mechanik Kompakt - Springer978-3-8351-9066-5/1.pdf · A.2 Drehung des Koordinatensystems...

Anhang
A Mathematische Grundlagen
A.1 Ebene Trigonometrie
A.1.1 Definitionen
Definition am Dreieck
Die Winkelfunktionen entsprechen dem Verhaltnis der Seiten in einem recht-winkligen Dreieck.
c
b
A B
a
α β
C
Bild A.1Winkelfunktionen am rechtwinkligen Dreieck
Mit den in Bild A.1 festgelegten Bezeichnungen gilt beispielsweise fur den Win-kel α:
Sinus =Gegenkathete
Hypotenusesin α =
a
c
Cosinus =Ankathete
Hypotenusecos α =
b
c
Tangens =Gegenkathete
Ankathetetan α =
a
b
Cotangens =Ankathete
Gegenkathetecot α =
b
a
(A.1)
Winkelfunktionen am Kreis
Die Definition am Dreieck lasst sich am Kreis fur große Winkel erweitern.
Die Koordinaten des Punktes P in Bild A.2 auf einem Kreis mit dem Radi-us r lassen sich mit den Winkelfunktionen ausdrucken, dies gilt auch fur Win-
P. Wriggers, et al., Technische Mechanik kompakt, DOI 10.1007/978-3-8351-9066-5,© B. G. Teubner Verlag / GWV Fachverlage GmbH, Wiesbaden 2006

A.2 Drehung des Koordinatensystems 453
Bild A.2Winkelfunktionen am Kreis
rr tan ϕ
r cos ϕ
r sin ϕϕ
x
P
y
kel ϕ > 90◦. Die Koordinaten von P sind also
P (r cos ϕ, r sin ϕ) .
A.1.2 Zusammenhange zwischen den Winkelfunktionen
Fur die Winkelfunktionen gelten folgende Beziehungen fur beliebige Winkel α:
sin2 α + cos2 α = 1
tan α =sin α
cos α(cos α �= 0)
1 + tan2 α =1
cos2 α(cos α �= 0)
cot α =1
tan α(tan α �= 0)
(A.2)
A.2 Drehung des Koordinatensystems
Bild A.3Drehung des Koordinatensystems
P
ξ
ϕξP
yP
ηP
x
η
y
xP

454 Anhang A Mathematische Grundlagen
Bei der in Bild A.3 skizzierten Drehung des Koordinatensystems um den Winkelϕ lassen sich die Koordinaten des Punktes P mit Hilfe der Transformationsma-trix wie folgt umrechnen:
"ξP
ηP
#=
"cos ϕ sin ϕ
− sin ϕ cos ϕ
#"xP
yP
#(A.3)
"xP
yP
#=
"cos ϕ − sin ϕ
sin ϕ cos ϕ
#"ξP
ηP
#(A.4)
A.3 Geometrische Momente
A.3.1 Definition
Unter geometrischen Momenten versteht man allgemein Integrale von Potenzender Koordinaten in der Form
Zs
xαyβzγ ds ,
ZA
xαyβzγ dA ,
ZV
xαyβzγ dV (A.5)
mit naturlichen Exponenten α, β und γ, wobei die Summe n = α + β + γ alsGrad des geometrischen Moments bezeichnet wird.
Flachenmomente
In der Mechanik werden hauptsachlich die Flachenmomente fur Querschnittevon Balken, also fur den zweidimensionalen Fall benotigt, d. h.
ZA
yβzγ dA . (A.6)
Tabelle A.1 zeigt einen Uberblick uber die Definitionen der wichtigsten Flachen-momente, diese werden in den folgenden Abschnitten detaillierter dargestellt.Eine Ubersicht uber die Flachenmomente einfacher Geometrien befindet sich inTabelle B.5.

A.3 Geometrische Momente 455
Grad Name Definition
0 Flache A =
ZA
dA
1 statisches Moment
Sy =
ZA
z dA
Sz =
ZA
y dA
2 Flachentragheitsmoment
Iy =
ZA
z2 dA
Iz =
ZA
y2 dA
2 Deviationsmoment der Flache Iyz = −ZA
yz dA
2 Polares Flachentragheitsmoment Ip =
ZA
r2 dA , (r2 = y2 + z2)
Tabelle A.1 Flachenmomente
Flacheninhalt
Der Flacheninhalt
A =
ZA
dA (A.7)
ist unabhangig von der Wahl des Koordinatensystems, da im Integral keineKoordinaten auftreten.
A.3.2 Statisches Moment und geometrischer Schwerpunkt
Das statische Moment wird auf eine Achse bezogen. Das auf die y-Achse bezo-gene statische Moment ist beispielsweise
Sy =
ZA
z dA . (A.8)
Da das statische Moment achsenbezogen ist, andert es sich, wenn man die zu-gehorige Achse verschiebt. Bild A.4 zeigt eine Flache mit einem infinitesimalen

456 Anhang A Mathematische Grundlagen
dA
z
Δzzy
y
z = z
Bild A.4Statisches Moment bei Verschiebung der y-Achse
Flachenelement dA. Bei Verschiebung der y-Achse um Δz, also z = z − Δz,erhalt man
Sy =
ZA
z dA =
ZA
z − Δz dA =
ZA
z dA − Δz
ZA
dA = Sy − Δz A .
(A.9)
Das Koordinatensystem kann so verschoben werden, dass Sy und Sz ver-schwinden. Der Ursprung eines solchen Koordinatensystems wird geometrischerSchwerpunkt S genannt, man spricht auch vom Schwerpunktskoordinatensystem.
Die Koordinaten des geometrischen Schwerpunkts in einem gegebenen y-z-Koordinatensystem ergeben sich mit der Forderung Sy = Sz = 0 ausGleichung A.9
yS =1
A
ZA
y dA , zS =1
A
ZA
z dA. (A.10)
Beispiel A.1 Schwerpunkt eines DreiecksBerechnen Sie den geometrischen Schwerpunkt (xS, yS) des Dreiecks mitder oberen Berandung g(x).
a
h
g(x) =h
ax
x
y

A.3 Geometrische Momente 457
Losung:1. Schritt: Berechnung der Dreiecksflache
A =
ZA
dA =
x=aZx=0
y=g(x)Zy=0
dy dx =
x=aZx=0
g(x) dx
=h
a
x=aZx=0
x dx =1
2ha .
2. Schritt: Berechnung des geometrischen Schwerpunktes
xS =1
A
Zx dA =
1
A
x=aZx=0
x g(x) dx
=1
A
»h
a
x3
3
–x=a
x=0
=1
A
1
3ha2 =
2
3a .
3. Schritt: Durch analoges Vorgehen erhalt man fur die y-Koordinate desgeometrischen Schwerpunkts
yS =1
3h .
Zusammengesetzte Flachen
Mit Gleichung A.9 und Gleichung A.10 erhalt man eine einfache Gleichung zurBerechnung des statischen Moments bei aus einfachen Geometrien zusammenge-setzten Flachen, deren Teilschwerpunkte bekannt sind. (Diese konnen beispiels-weise Tabelle B.5 entnommen werden). Sy und Sz konnen mit
Sy =X
i
zSiAi , Sz =X
i
ySiAi (A.11)
berechnet werden, wobei zSi und ySidie Koordinaten der geometrischen Teil-schwerpunkte und Ai die Flachen der Teile sind. Daraus folgt auch entsprechendGleichung A.10 fur den geometrischen Schwerpunkt von solchen zusammenge-setzten Flachen:
yS =
Pi
ySiAiPi
Ai, zS =
Pi
zSiAiPi
Ai(A.12)
Die praktische Berechnung des Flachenschwerpunkts einer zusammengesetztenFlache wird in Beispiel 5.1 gezeigt.

458 Anhang A Mathematische Grundlagen
Geometrischer Linien- und Volumenschwerpunkt
yx
zs
S
dsdV
S
Bild A.5 Geometrischer Schwerpunkt von Linie und Volumen
Analog zu Gleichung A.10 lassen sich im allgemeinen dreidimensionalen Falldie geometrischen Schwerpunkte von Linien und Volumen berechnen. Fur denLinienschwerpunkt gilt
xS =1
L
Zx ds , yS =
1
L
Zy ds , zS =
1
L
Zz ds (A.13)
mit der Lange
L =
Zds . (A.14)
Der Volumenschwerpunkt lasst sich mit
xS =1
V
Zx dV , yS =
1
V
Zy dV , zS =
1
V
Zz dV (A.15)
berechnen mit dem Volumen
V =
ZdV . (A.16)
Beispiel A.2 LinienschwerpunktBerechnen Sie den Linienschwerpunkt (xS, yS) des dargestellten Kreisbo-gens.
α
R cos ϕ
ϕ
ds = R dϕ
x
y
Rα

A.3 Geometrische Momente 459
Losung:Aus der Symmetrie ergibt sich
xS = 0 .
Die Lange des Kreisbogens ergibt sich nach Gleichung A.14 zu
L =
Zds = 2
Z α
0
R dϕ = 2 R α .
Die Koordinate yS bestimmt sich mit
y = R cos ϕ
nach Gleichung A.13 zu
yS =2
L
Z α
0
R cos ϕ ds = Rsin α
α.
Beispiel A.3 VolumenschwerpunktBerechnen Sie den geometrischen Schwerpunkt (xS, yS, zS) der skizziertenPyramide.
z
x
y
a
a
h
Losung:Da sich die horizontalen Querschnittsflachen A(z) der Pyramide leicht inAbhangigkeit der z-Koordinate ausdrucken lassen, empfiehlt sich eine Inte-gration uber die Pyramidenhohe h. Die Querschnittsflache ist
A(z) =ha“1 − z
h
”i2= a2
„1 − 2
z
h+
z2
h2
«Das Volumen V der Pyramide ist
V =
hZ0
A(z) dz = a2
hZ0
„1 − 2
z
h+
z2
h2
«dz
= a2
»z − z2
h+
z3
3h2
–h
0
=1
3a2h .

460 Anhang A Mathematische Grundlagen
Die Lage des Schwerpunktes ergibt sich in x- und y-Richtung aus der Sym-metrie zu
xS = 0 , yS = 0 .
In z-Richtung erhalt man aus Gleichung A.15 die Schwerpunktkoordinate
zS =1
V
hZ0
z A(z) dz =a2
V
hZ0
z
„1 − 2
z
h+
z2
h2
«dz
=a2
V
»z2
2− 2 z3
3h+
z4
4 h2
–h
0
=a2
V
h2
12=
1
4h .
A.3.3 Flachentragheitsmoment
Definition
Neben den axialen Flachentragheitsmomenten
Iy =
ZA
z2 dA , Iz =
ZA
y2 dA , (A.17)
die wegen der quadratischen Terme stets positiv sind, ist das Deviationsmomentoder Zentrifugalmoment definiert durch
Iyz = −ZA
yz dA . (A.18)
Bei Flachen, bei denen eine der Koordinatenachse Symmetrieachse ist, ist dasDeviationsmoment null. Dies wird unten bei der Berechnung der Haupttrag-heitsmomente gezeigt.
Anmerkung: Das negative Vorzeichen wird hier aus rechentechnischen Grundeneingefuhrt. In der Literatur wird das Deviationsmoment teilweise auch ohne ne-gatives Vorzeichen definiert, daher ist beim Nachschlagen von Querschnittswertenin Tabellen auf das richtige Vorzeichen zu achten.
Das polare Flachentragheitsmoment ist definiert durch
Ip =
ZA
r2 dA =
ZA
`y2 + z2´ dA = Iy + Iz (A.19)
und kann daher leicht aus den axialen Tragheitsmomenten berechnet werden.

A.3 Geometrische Momente 461
Beispiel A.4 Flachentragheitsmomente eines RechtecksBerechnen Sie fur das dargestellte Rechteck der Breite B und Hohe H dieFlachentragheitsmomente bzgl. des Schwerpunktskoordinatensystems.
B B
y
z
Sy
z
H
H/2
H/2dA = B dzz
dz
Losung:Zur Bestimmung von Iy ist es zweckmaßig, ein Flachenelement dA zu wah-len, bei dem alle Punkte den gleichen Abstand z von der y-Achse haben.Daraus folgt
Iy =
ZA
z2 dA =
H/2Z−H/2
z2B dz
=1
3Bz3
˛H/2
−H/2
=1
3B
»H3
8−„−H3
8
«–=
H3B
12
Entsprechend ergibt sich durch Vertauschen von B und H
Iz =HB3
12
und daraus unter Verwendung von Gleichung A.19
Ip =H3B + HB3
12.
Wegen der Symmetrie des Rechtecks bzgl. der Koordinatenachsen ist dasDeviationsmoment
Iyz = 0 .
Parallelverschiebung des Koordinatensystems
Verschiebt man die Achsen wie in Bild A.6 dargestellt parallel aus dem Schwer-punkt heraus mit z = z + zS, y = y + yS, erhalt man

462 Anhang A Mathematische Grundlagen
y
z
zSS
dA
z
y
y
z
yS
Bild A.6Flachentragheitsmoment bei Parallelverschiebungder Achsen
Iy =
Zz2 dA =
Z(z + zS)2 dA
=
Zz2 dA| {z }Iy
+2zS
Zz dA| {z }0
+ z2S
ZdA| {z }
A
,
Iz =
Zy2 dA =
Z(y + yS)2 dA
=
Zy2 dA| {z }Iz
+2yS
Zy dA| {z }0
+ y2S
ZdA| {z }
A
, (A.20)
Iyz = −Z
yz dA = −Z
(y + yS)(z + zS) dA
= −Z
yz dA| {z }Iyz
− yS
Zz dA| {z }0
− zS
Zy dA| {z }0
− ySzS
ZdA| {z }
A
.
Aus diesen Gleichungen folgen die Steinerschen Satze (nach Jacob Steiner,1796 – 1863)
Iy = Iy + z2SA ,
Iz = Iz + y2SA , (A.21)
Iyz = Iyz − ySzSA .
Aus den Steinerschen Formeln erkennt man unmittelbar, dass die axialenFlachentragheitsmomente bezuglich des Schwerpunktskoordinatensystems amkleinsten sind. Die so genannten Steineranteile z2
SA und y2SA sind stets positiv,
ySzSA kann je nach Lage der Achsen positiv oder negativ sein. Bei Verschiebungaus einem beliebigen Koordinatensystem in das Schwerpunktskoordinatensys-tem mussen die Steineranteile abgezogen werden.

A.3 Geometrische Momente 463
Beispiel A.5 Flachentragheitsmoment eines DreiecksBerechnen Sie fur den dargestellten Dreiecksquerschnitt die Flachentrag-heitsmomente Iy und Iy. Kontrollieren Sie den Zusammenhang der Fla-chentragheitsmomente Iy und Iy mit Hilfe des Steinerschen Satzes.
4a 2a
a
2a
z
S
z
y
y
Losung:Mit den Geradengleichungen fur die Hypotenuse
y = 2a − 2z , y = 6a − 2z
folgt
Iy =
ZA
z2 dA =
2aZ−a
2a−2zZ−2a
z2 dy dz =
2aZ−a
z2 [y]2a−2z−2a dz
=
2aZ−a
`4az2 − 2z3´ dz =
»4a
3z3 − 1
2z4
–2a
−a
=9
2a4
und
Iy =
ZA
z2 dA =
3aZ0
6a−2zZ0
z2 dy dz =
3aZ0
z2 [y]6a−2z0 dz
=
3aZ0
`6az2 − 2z3´ dz =
»2az3 − 1
2z4
–3a
0
=27
2a4 .
Aus Gleichung A.21 folgt fur Iy direkt
Iy =9
2a4 + (−a)2
„1
26a 3a
«=
27
2a4 .
Anmerkung: In Tabelle B.5 sind Flachentragheitsmomente von diversen Quer-schnitten angegeben.
Drehung des Koordinatensystems
Bild A.7 zeigt das durch Drehung um den mathematisch positiven Winkel ϕ ausdem Schwerpunktskoordinatensystem y, z hervorgegangene System η, ζ sowie ein

464 Anhang A Mathematische Grundlagen
ϕS
dAη
z
y
ζ
Bild A.7Flachentragheitsmoment bei Drehung desKoordinatensystems
infinitesimales Flachenstuck dA. Die Lage im neuen Koordinatensystem lasstsich in Abhangigkeit der ursprunglichen Koordinaten berechnen.
Damit folgt beispielsweise fur das axiale Flachentragheitsmoment bezuglich desgedrehten Koordinatensystems
Iη =
ZA
ζ2 dA =
ZA
(−y sin ϕ + z cos ϕ)2 dA
=
ZA
`y2 sin2 ϕ − 2yz sin ϕ cos ϕ + z2 cos2 ϕ
´dA
= Iz sin2 ϕ + Iyz2 sin ϕ cos ϕ + Iy cos2 ϕ . (A.22)
Mit den Additionstheoremen
2 sin ϕ cos ϕ = sin 2ϕ ,
cos2 ϕ =1
2(1 + cos 2ϕ) ,
sin2 ϕ =1
2(1 − cos 2ϕ) ,
lasst sich Iη schließlich umschreiben zu
Iη =1
2(Iy + Iz) +
1
2(Iy − Iz) cos 2ϕ + Iyz sin 2ϕ . (A.23)
Entsprechend folgt
Iζ =1
2(Iy + Iz) − 1
2(Iy − Iz) cos 2ϕ − Iyz sin 2ϕ , (A.24)
Iηζ = − 1
2(Iy − Iz) sin 2ϕ + Iyz cos 2ϕ . (A.25)
Haupttragheitsmomente
Unter Haupttragheitsmomenten versteht man die durch Drehung eines Schwer-punktskoordinatensystems erreichbaren maximalen und minimalen Flachentrag-heitsmomente.

A.3 Geometrische Momente 465
Um diese zu ermitteln leitet man das Flachentragheitsmoment Iη nach demDrehwinkel ϕ ab und setzt das Ergebnis gleich null. Damit erhalt man als Be-dingung fur ein extremales Flachentragheitsmoment die Gleichung
−1
2(Iy − Iz) 2 sin 2ϕ∗ + Iyz 2 cos 2ϕ∗ = 0 . (A.26)
Woraus sich die Bedingung fur den Drehwinkel ergibt,
tan 2ϕ∗ = 2Iyz
Iy − Iz. (A.27)
Mochte man die Extremwerte von Iz bestimmen, so erhalt man wegen der or-thogonalen Achsen dieselben Gleichungen. Fur eine Drehung um den Winkel ϕ∗
erhalt man also sowohl die maximalen als auch die minimalen Flachentrag-heitsmomente. Die zugehorigen Achsen werden Hauptachsen genannt und mit I(maximales Tragheitsmoment) und II (minimales Tragheitsmoment) bezeichnet.Da der Tangens π-periodisch ist, erhalt man zwei Losungen ϕ∗
1 und ϕ∗2, die sich
um π2
bzw. 90◦ unterscheiden, also
ϕ∗2 = ϕ∗
1 + 90◦ . (A.28)
Beide Winkel fuhren aber auf dieselben Hauptachsen, die den Winkel 90◦ ein-schließen. Das Ergebnis unterscheidet sich lediglich in der Zuordnung der Haupt-achsen zu den Koordinatenachsen η und ζ.
Vergleicht man Gleichung A.26 mit der Gleichung fur die Transformation desDeviationsmoments A.25, so sieht man, dass in einem Hauptachsensystem dasDeviationsmoment verschwindet. Ein Hauptachsensystem liegt genau dann vor,wenn das Deviationsmoment null ist. Setzt man den mit Gleichung A.27 erhal-tenen Winkel in Gleichung A.23 und A.24 ein, so kann man auch eine Formelzur direkten Berechnung der Haupttragheitsmomente herleiten. Unter Beruck-sichtigung elementarer trigonometrischer Zusammenhange folgt
II,II =Iy + Iz
2±s„
Iy − Iz
2
«2
+ I2yz . (A.29)
Im Allgemeinen benotigt man allerdings auch die Lage der Hauptachsen nachGleichung A.27, so dass sich eine Berechnung mit den Gleichungen A.27, A.23und A.24 empfiehlt.
Der Mohrsche Tragheitskreis
Die Transformationsgleichungen A.23, A.24 und A.25 fur Flachentragheitsmo-mente konnen grafisch interpretiert werden. Dies fuhrt auf den Mohrschen Trag-heitskreis (nach Christian Otto Mohr, 1853-1918).
Bild A.8 zeigt einen solchen Tragheitskreis, in dem fur den dargestellten Quer-schnitt die Tragheitsmomente bezuglich des ursprunglichen Koordinatensystems

466 Anhang A Mathematische Grundlagen
I
S
z
II
y
Iy IIIII
2ϕ∗Iz
Iij
Iyz
−Iyz
Py
Pz
ϕ∗
Iy + Iz
2
Iy − Iz
2
Iyz
Ii
Bild A.8 Mohr’scher Tragheitskreis
y, z eingezeichnet sind, sowie die Hauptachsen I und II. Der Rotationswinkel ϕtritt im Mohr’schen Tragheitskreis mit dem doppelten Betrag und dem entge-gengesetzten Drehsinn auf.
Man erkennt auch hier, dass es stets ein maximales und ein minimales Fla-chentragheitsmoment gibt, wobei die zugehorigen Hauptachsen senkrecht auf-einander stehen. Gleichung A.27 ist als trigonometrische Beziehung im grauunterlegten Dreieck erkennbar.
Mit dem Satz von Pythagoras lasst sich in diesem Dreieck der Radius desKreises berechnen. Dies fuhrt auf Gleichung A.29.
Ein Sonderfall liegt vor, wenn die Haupttragheitsmomente II und III gleichgroß sind. Dann wird der Mohr’sche Tragheitskreis zu einem Punkt und alleRichtungen sind Hauptachsen mit jeweils dem gleichen Tragheitsmoment. Diesist beispielsweise bei quadratischen oder kreisrunden Querschnitten der Fall,siehe dazu auch den folgenden Abschnitt.
Haupttragheitsachsen symmetrischer Profile
y′y
z
dA dA′
yS
Symmetrieachse
Bild A.9Symmetrischer Querschnitt

A.3 Geometrische Momente 467
Bild A.9 zeigt einen symmetrischen Querschnitt, bei dem das Koordinatensys-tem so festgelegt sei, dass die z-Achse mit der Symmetrieachse zusammenfallt,wie in Bild A.9 gezeigt. Zu jedem Flachenelement dA mit dem Abstand y zurz-Achse gibt es ein symmetrisches Element dA′ mit dem Abstand y′ = −y. Da-her erhalt man bei der Berechnung des Deviationsmoments nach Gleichung A.18
Iyz = −ZA
yz dA = −Z12
A
yz dA −Z12
A
y′z dA
= −Z12
A
yz dA −Z12
A
−yz dA = 0 . (A.30)
Das Deviationsmoment ist demnach bei symmetrischen Querschnitten null. Diesist im Allgemeinen genau dann der Fall, wenn das gewahlte Koordinatensys-tem ein Hauptachsensystem ist. Daraus folgt, dass bei einfach symmetrischenQuerschnitten die Symmetrieachse eine Hauptachse ist. Die zweite Hauptachseverlauft orthogonal zur Symmetrieachse durch den Schwerpunkt.
I
II
I
II
I
II
Bild A.10 Hauptachsen symmetrischer Querschnitte
Hieraus lasst sich folgern, dass ein Querschnitt, der Symmetrieachsen hat, dienicht orthogonal sind, wie das Quadrat, das gleichseitige Dreieck und der Kreisin Bild A.10, mehrere Hauptachsen haben. Bei diesen Querschnitten entartet derMohrsche Tragheitskreis zu einem Punkt und alle Achsen sind Hauptachsen.
Flachentragheitsmomente zusammengesetzter Querschnitte
Ist eine Querschnittsflache A aus geometrisch einfachen Teilflachen Ai zusam-mengesetzt, deren Flachentragheitsmomente bekannt sind (z. B. nach Tabel-le B.5), so lasst sich das Flachentragheitsmoment des Gesamtquerschnitts ausder Summe der Flachentragheitsmomente der Einzelflachen berechnen, nachdemdiese zunachst auf ein gemeinsames Koordinatensystem bezogen wurden.

468 Anhang A Mathematische Grundlagen
1
S
S2
2
y2
z2
yS2
zS2
y
z
Bild A.11Flachentragheitsmomente eineszusammengesetzten Querschnitts
Bild A.11 zeigt einen aus zwei Teilen zusammengesetzten Querschnitt mit demlokalen Koordinatensystem fur Teil 2. Fur die Flachentragheitsmomente gilt
Iy =
ZA
z2 dA =
ZA1
z2 dA1 +
ZA2
z2 dA2 + . . . =X
i
Iy i (A.31)
Iz = . . . =X
i
Iz i (A.32)
Iyz = . . . =X
i
Iyz i . (A.33)
Fur eine formalisierte Berechnung von Flachentragheitsmomenten von zusam-mengesetzten Querschnitten ist folgende Umformung der o. g. Gleichungen sinn-voll,
Iy =X
i
Iyi +X
i
z2SiAi ,
Iz =X
i
Izi +X
i
y2SiAi , (A.34)
Iyz =X
i
Iyzi −X
i
ySizSiAi ,
wobei Iy i, Iz i und Iyz i die Eigenanteile der Flachentragheitsmomente derTeilflachen (bezogen auf die jeweiligen Teilschwerpunktsachsen) sind sowie ySi
und zSi die Abstande vom Gesamtschwerpunkt zum jeweiligen Teilschwerpunkt.
Beispiel A.6 Flachentragheitsmoment eines zusammenesetzten QuerschnittsBerechnen Sie fur das dargestellte T-Profil die FlachentragheitsmomenteIy, Iz und Iyz bezuglich der Schwerpunktsachsen.

A.3 Geometrische Momente 469
S
z
y
8a
8a
a
a
zS
y
z
Losung:Da das T-Profil zur z-Achse symmetrisch ist, ist zum einen das Deviations-moment Iyz null, zum anderen liegt der Schwerpunkt ebenfalls auf dieserAchse (ys = 0). Die z-Koordinate des Schwerpunkts berechnet sich nachGleichung A.12 zu
zS =11
4a .
Das T-Profil wird in die zwei Teilflachen Flansch (1) und Steg (2) aufgeteilt,deren (Teil-) Schwerpunkte ebenfalls auf der z-Achse liegen
yS1 = 0 , yS2 = 0 .
Die z-Koordinaten der Teilschwerpunkte ergeben sich zu
zS1 = −11
4a +
1
2a = −9
4a , zS2 = 5a − 11
4a =
9
4a .
Mit Gleichung A.34 folgt fur die gesuchten axialen Flachentrag-heitsmomente
Iy = Iy 1 + Iy 2 + z2S1A1 + z2
S2A2
=1
12a3 · 8a +
1
12a · (8a)3 +
„−9
4a
«2
· 8a2 +
„9
4a
«2
· 8a2
=373
3a4 ,
Iy = Iz 1 + Iz 2 + y2S1A1 + y2
S2A2
=1
12a · (8a)3 +
1
12a3 · 8a + 0 + 0 =
130
3a4 .
Beispiel A.7 Hauptachsen, HaupttragheitsmomenteGesucht sind die Flachentragheitsmomente Iy, Iz und Iyz bezuglich desSchwerpunktskoordinatensystems y, z sowie Hauptachsen und Haupttrag-heitsmomente II und III fur das abgebildete L-Profil.

470 Anhang A Mathematische Grundlagen
5 cm
1 cm
6 cm
y
z
1 cm
Losung:Fur die Berechnung der Flachentragheitsmomente muss zunachst der Fla-chenschwerpunkt bestimmt werden. Dazu zerlegen wir die Flache in zweiTeilflachen und verwenden Gleichung A.12 zur Berechnung des Flachen-schwerpunktes,
yS =yS1 A1 + yS2 A2
A1 + A2=
4.5 · 6 + 2 · 46 + 4
= 3.5 cm
zS =zS1 A1 + zS2 A2
A1 + A2=
3 · 6 + 5.5 · 46 + 4
= 4 cm .
Damit kann man nun die Flachentragheitsmomente bezuglich des Schwer-punktskoordinatensystems berechnen. Dazu benotigt man die Flachentrag-heitsmomente der Teilflachen bezuglich ihrer Teilschwerpunkte, wie sie z. B.in Tabelle B.5 aufgefuhrt sind. Mit den Abmessungen b1, h1, b2 und h2 folgt
Iy =b1h
31
12+ (zS1 − zS)2 · A1 +
b2h32
12+ (zS2 − zS)2 · A2
=1 · 63
12+ (3 − 4)2 · 6 +
4 · 13
12+ (5.5 − 4)2 · 4 = 33.33 cm4
Iz =h1b
31
12+ (yS1 − yS)2 · A1 +
h2b32
12+ (yS2 − yS)2 · A2
=6 · 13
12+ (4.5 − 3.5)2 · 6 +
1 · 43
12+ (2 − 3.5)2 · 4 = 20.83 cm4
Iyz = 0 − (yS1 − yS)(zS1 − zS) A1
+ 0 − (yS2 − yS)(zS2 − zS) A2
= 0 − (4.5 − 3.5) · (3 − 4) · 6 + 0 −(2 − 3.5) · (5.5 − 4) · 4= 15 cm4 .
Die Richtung der Hauptachsen erhalt man mit Hilfe von Gleichung A.27,
tan 2ϕ∗ = 2Iyz
Iy − Iz= 2 · 15
33.33 − 20.83= 2.4 ,
⇒ 2ϕ∗ = 67.38◦ ⇒ ϕ∗1 = 33.69◦ .
Anmerkung: Als zweite Losung ergibt sich der Winkel ϕ∗2 = 33.69◦ + 90◦,
der aber auf dieselben Hauptspannungen fuhrt (vergleiche Gleichung A.28).

A.3 Geometrische Momente 471
Die zugehorigen Haupttragheitsmomente erhalt man schließlich mit denTransformationsgleichungen A.23 und A.24,
Iη =1
2(Iy + Iz) +
1
2(Iy − Iz) cos 2ϕ + Iyz sin 2ϕ
=1
2(33.33 + 20.83) +
1
2(33.33 − 20.83) cos 67.38◦
+15 sin 67.38◦ = 43.33 cm4
Iζ =1
2(Iy + Iz) − 1
2(Iy − Iz) cos 2ϕ − Iyz sin 2ϕ
=1
2(33.33 + 20.83) − 1
2(33.33 − 20.83) cos 67.38◦
−15 sin 67.38◦ = 10.83 cm4
Die Haupttragheitsmomente sind so definiert, dass II das maximale undIII das minimale Tragheitsmoment ist, also hier
II = Iη = 43.33 cm4 , III = Iζ = 10.83 cm4 .
Die Lage der Hauptachsen I und II ist durch den Winkel ϕ∗ (oder ϕ∗2)
bestimmt:
I
II
S
zζ
ηϕ∗
2
ϕ∗1
y
Zur anschaulichen Kontrolle kann man den Mohr’schen Tragheitskreis ver-wenden.
10 20 30 40
-10
10
2ϕ∗2
0
Iij
−Iyz
Iyz
II
IIIIz
Iy 50
2ϕ∗1
Ii

472 Anhang A Mathematische Grundlagen
Flachentragheitsmomente dunnwandiger Querschnitte
Dunnwandige Querschnitte sind Querschnitte, bei denen eine Kantenlange (z. B.die Dicke t) wesentlich kleiner als die andere ist (z. B. die Lange a), d. h. t � a.
Bei der Berechnung von Flachentragheitsmomenten von dunnwandigen Quer-schnitten konnen dann meistens die Eigenanteile der Flachentragheitsmomentevernachlassigt werden, wenn die kleinere Kantenlange potenziert wird.
Die Steineranteile dieser (Teil-)Querschnitte durfen jedoch auf keinen Fall ver-nachlassigt werden. Sie liefern dennoch einen wesentlichen Anteil zum gesamtenFlachentragheitsmoment und mussen deswegen unbedingt in Betracht gezogenwerden.
Beispiel A.8 Flachentragheitsmoment eines dunnwandigen QuerschnittsBerechnen Sie das axiale Flachentragheitsmoment des skizzierten dunnwan-digen T-Profils (t � a) bezuglich der angegebenen Schwerpunktsachse y.
a
Sy
a
z
t
ta/4
Losung:Mit der Aufteilung des Querschnitts in die beiden Teilflachen Flansch (1)und Steg (2) ergibt sich fur die z-Koordinaten der Teilschwerpunkte
zS1 = −a
4, zS2 =
a
4.
Die Eigenanteile der Flachentragheitsmomente der Teilflachen sind unterBerucksichtigung der Dunnwandigkeit (t � a)
Iy 1 =at3
12≈ 0 , Iy 2 =
a3t
12.
Aus Gleichung A.34 folgt fur das gesuchte axiale Flachentragheitsmoment
Iy = Iy 1 + Iy 2 + z2S1A1 + z2
S2A2
= 0 +a3t
12+“−a
4
”2
at +“a
4
”2
at =5
24a3t .
Die Auswirkung der Vernachlassigung der Eigenanteile zeigt die Betrach-tung unterschiedlicher Abmessungsverhaltnisse a/t:

A.3 Geometrische Momente 473
Fur a/t = 10 folgt
Iy =1250
6t4 , Iy 1 =
5
6t4 ,
fur a/t = 100 folgt
Iy =625000
3t4 , Iy 1 =
25
3t4 .
Die Abweichung von der exakten Losung betragt damit fur a/t = 10 0.4%bzw. fur a/t = 100 sogar nur noch 0.004%.
A.3.4 Volumentragheitsmoment
Entsprechend den Flachentragheitsmomenten fur eine Flache in Gleichung A.17sind fur ein Volumen V die axialen Volumentragheitsmomente bezuglich einesSchwerpunktskoordinatensystems definiert durch
Θ(S)x =
Z `y2 + z2´ dV , (A.35)
Θ(S)y =
Z `z2 + x2´ dV , (A.36)
Θ(S)z =
Z `x2 + y2´ dV , (A.37)
die deviatorischen Tragheitsmomente lauten
Θ(S)xy = Θyx = −
Zxy dV , (A.38)
Θ(S)yz = Θzy = −
Zyz dV , (A.39)
Θ(S)zx = Θxz = −
Zzx dV . (A.40)
Die Volumentragheitsmomente bezuglich der Parallelen zu den Achsen durcheinen Punkt A(xA, yA, zA) lassen sich mit Hilfe der Steiner’schen Satze berech-nen,
Θ(A)x = Θ(S)
x + V (y2A + z2
A) (A.41)
Θ(A)y = Θ(S)
y + V (x2A + z2
A) (A.42)
Θ(A)z = Θ(S)
z + V (x2A + y2
A) (A.43)
Θ(A)xy = Θ(S)
xy − V (xA yA) (A.44)
Θ(A)yz = Θ(S)
yz − V (yA zA) (A.45)
Θ(A)zx = Θ(S)
zx − V (zA xA) (A.46)

474 Anhang A Mathematische Grundlagen
Beispiel A.9 Massentragheitsmoment eines QuadersVon dem abgebildeten Quader ist das Massentragheitsmoment bezuglichder x-Achse durch den Schwerpunkt S gesucht.
z
x
y
a
c
bS
Losung:Nach Gleichung A.35 ist
Θ(S)x =
Z `y2 + z2´ dV
Die Integration kann nacheinander in jeder Achsrichtung erfolgen. Die In-tegrationsgrenzen mussen dabei so gewahlt werden, dass genau uber dasgesamte Volumen des Quaders integriert wird, also
Θ(S)x =
c/2Z−c/2
b/2Z−b/2
a/2Z−a/2
`y2 + z2´ dx dy dz
=
c/2Z−c/2
b/2Z−b/2
`y2 + z2´ a dy dz
=
c/2Z−c/2
»„1
3y2 + z2
«y a
–y=b/2
y=−b/2
dz
=
c/2Z−c/2
„b2
12+ z2
«ab dz
=
»„b2
12+
1
3z2
«zab
–z=c/2
z=−c/2
=b2 + c2
12abc .
A.4 Vektor- und Matrizenrechnung
In diesem Abschnitt wird stets von einem kartesischen Koordinatensystem aus-gegangen. Auf eine Einfuhrung in die Tensorrechnung wird verzichtet, da diesefur die Grundlagen der Mechanik nicht benotigt wird.

A.4 Vektor- und Matrizenrechnung 475
A.4.1 Vektoren
Darstellung eines Vektors
In einem kartesischen Koordinatensystem ist in Richtung jeder Achse ein Ein-heitsvektor der Lange 1 definiert. Ein allgemeiner Vektor a, dargestellt durcheinen Pfeil, setzt sich aus Vielfachen dieser Einheitsvektoren zusammen.
ax
az
ex
ayey
ez
a
z
y
x
a = ax ex + ay ey + az ez
=3X
i=1
ai ei
In der Regel wird die matrizielle Schreibweise verwendet, d. h. es werden lediglichdie Faktoren ax, ay, az in einer Spaltenmatrix notiert
a =
264 ax
ay
az
375 .
Das verwendete kartesische Koordinatensystem muss als Rechtshandsystem de-finiert sein, d. h. die Lage der orthogonalen Koordinatenachsen entspricht demgespreizten Daumen, Zeigefinger und Mittelfinger der rechten Hand, wie inBild A.12 dargestellt ist.
Bild A.12Rechtshandsystem
x
z
y
x
y
z
Skalarprodukt
Das Skalarprodukt a · b zweier Vektoren a und b ist ein Skalar c:

476 Anhang A Mathematische Grundlagen
b
ϕ a
b cos ϕ
a
c = a · b = ab cos(ϕ)
= axbx + ayby + azbz
= aTb = [ax, ay, az]
264 bx
by
bz
375 .
Betrag eines Vektors
Der Betrag (die”Lange“) eines Vektors lasst sich mit Hilfe des Skalarproduktes
berechnen:
a = |a| =√
a · a =q
a2x + a2
y + a2z
Vektorprodukt
Das Vektorprodukt oder Kreuzprodukt a × b zweier Vektoren a und b ist einVektor c, der senkrecht auf der von den Vektoren a und b aufgespannten Flachesteht. Dabei ist der Betrag des Vektors |c| gleich dem Flacheninhalt A des vona und b aufgespannten Parallelogramms.
b
a
A = |c|
c = a× b
c = a × b

A.4 Vektor- und Matrizenrechnung 477
Die Berechnung des Vektorprodukts kann mit Hilfe der Sarrus-Regel erfolgen:
c = det
0B@ ex ey ez
ax ay az
bx by bz
1CA =
˛˛ ex ey ez
ax ay az
bx by bz
˛˛
= (aybz − azby)ex + (azbx − axbz)ey + (axby − aybx)ez
= [aybz − azby, azbx − axbz, axby − aybx]
264 ex
ey
ez
375= [aybz − azby, azbx − axbz, axby − aybx] e
= eT
264 aybz − azby
azbx − axbz
axby − aybx
375Die drei Vektoren a, b und c bilden in dieser Reihenfolge ein Rechtshandsys-tem, siehe Bild A.12. Daher lasst sich auch die folgende Rechenregel fur dasVektorprodukt leicht nachvollziehen:
a × b = −b × a
A.4.2 Dyaden (Tensoren 2. Stufe)
Um zum Beispiel Spannungszustande dreidimensional darstellen zu konnen, wer-den in der Mechanik Dyaden bzw. Tensoren 2. Stufe benotigt.
Darstellung eines Tensors 2. Stufe
Tensoren 2. Stufe konnen sowohl nach der Einsteinschen Summenkonvention alsauch in der Komponentenschreibweise geschrieben werden:
σ = σijeiej
= σxxexex + σxyexey + σxzexez
+ σyxeyex + σyyeyey + σyzeyez
+ σzxezex + σzyezey + σzzezez .
In der matriziellen Schreibweise sieht die Darstellung folgendermaßen aus:
σ = eTσe
=h
ex ey ez
i264 σxx σxy σxz
σyx σyy σyz
σzx σzy σzz
375264 ex
ey
ez
375 .

478 Anhang A Mathematische Grundlagen
Die Ausfuhrung des Matrizenprodukts nach dem Falkschen Schema ergibt wie-der 264 ex
ey
ez
375264 σxx σxy σxz
σyx σyy σyz
σzx σzy σzz
375264 σxxex + σxyey + σxzez
σyxex + σyyey + σyzez
σzxex + σzyey + σzzez
375h
ex ey ez
i= σxxexex + σxyexey + σxzexez
+ σyxeyex + σyyeyey + σyzeyez
+ σzxezex + σzyezey + σzzezez .
Eigenwerte und Eigenvektoren symmetrischer Matrizen (Dyaden)
Fur symmetrische Matrizen (Dyaden) gilt
σyx = σxy ,
σzx = σxz ,
σzy = σyz .
Fur alle symmetrischen Dyaden gibt es eine Drehtransformation in eine Diago-nalform, also
σ∗ =
264 σ1 0 0
0 σ2 0
0 0 σ3
375 .
Die Diagonalelemente heißen Eigenwerte oder Hauptwerte der Dyade. Es gilt
[σ − σiI] = 0 ,
woraus die Bedingung
det
264 σxx − σi σxy σxz
σxy σyy − σi σyz
σxz σyz σzz − σi
375 = 0
folgt.Aus der Determinante berechnet sind das charakteristische Polynom zur Be-stimmung der Eigenwerte
σ3i − I1σ
2i + I2σi − I3 = 0

A.4 Vektor- und Matrizenrechnung 479
mit den Invarianten
I1 = σxx + σyy + σzz ,
I2 = σxxσyy + σyyσzz + σzzσxx − `σ2xy + σ2
yz + σ2zx
´,
I3 = det σ = σxx
`σyyσzz − σ2
yz
´− σxy (σxyσzz − σyzσxz)
+ σxz (σxyσyz − σyyσxz) .
Sind die Eigenwerte bestimmt, so konnen die zugehorigen Eigenvektoren xi auseinem linearen Gleichungssystem berechnet werden,264 σxx − σi σxy σxz
σxy σyy − σi σyz
σxz σyz σzz − σi
375264 xi
yi
zi
375 =
264 0
0
0
375 .
Die Eigenvektoren beschreiben die Orientierung des Hauptachsensystems be-zuglich des inertialen Koordinatensystems.
Anmerkung: Fur symmetrische Matrizen sind alle Eigenwerte σi und Eigenvek-toren xi reell!
Mit Hilfe der Eigenvektoren lasst die Dyade σ in die Diagonalform σ∗ transfor-mieren:
σ∗ = AT
σA mit A = [ x1, x2, x3 ]
Ebenes Problem
Fur ebene symmetrische Probleme gilt
σ =
264 σxx σxy 0
σxy σyy 0
0 0 0
375mit den Invarianten
I1 = σxx + σyy
I2 = σxxσyy − σ2xy
I3 = 0
und dem charakteristischen Polynom
σ3i − I1σ
2i + I2σi − I3 = 0 .
Mit der trivialen Losung
σ3 = 0

480 Anhang A Mathematische Grundlagen
folgen die restlichen Eigenwerte aus
σ2i − (σxx + σyy) σi +
`σxxσyy − σ2
xy
´= 0 .
Die Losungen dieser quadratischen Gleichung lauten
σ1,2 =σxx + σyy
2±r“σxx + σyy
2
”2
− `σxxσyy − σ2xy
´=
σxx + σyy
2±r“σxx − σyy
2
”2
+ σ2xy .
Beispiel A.10 Eigenwerte, EigenvektorenBerechnen Sie die Eigenwerte und Eigenvektoren der gegebenen (symme-trischen) Matrix.
σ =
264 4√
3 0√3 2 0
0 0 0
375Losung:Die Eigenwerte lassen sich entweder durch Nullstellenbestimmung des cha-rakteristischen Polynoms oder mit Hilfe der Invarianten bestimmen. Hiersollen beide Wege gezeigt werden. Mit Hilfe der Invarianten folgt unmittel-bar
σ1,2 =4 + 2
2±s„
4 − 2
2
«2
+√
32
= 3 ± 2 .
Das charakteristische Polynom lautet
det
264 4 − σi
√3 0√
3 2 − σi 0
0 0 0
375 = (4 − σi) (2 − σi) − 3 = 0
mit den Losungen
σ2i − 6σi + 5 = 0 ⇒ σ1,2 = 3 ±√
9 − 5 = 3 ± 2 .
Damit lauten die Eigenwerte
σ1 = 5 ,
σ2 = 1 .
Der 1. Eigenvektor x1 lasst sich nun aus mit Hilfe des 1. Eigenwertes σ1
durch Losung eines linearen Gleichungssystems losen:"4 − 5
√3√
3 2 − 5
#"x1
y1
#=
"0
0
#
⇒ −x1 +√
3 y1 = 0√3 x1 − 3y1 = 0
⇒ x1 =√
3 y1

A.5 Ubungsaufgaben 481
Dieses Gleichungssystem ist linear abhangig, da sich Eigenvektoren nur bisauf einen Faktor bestimmen lassen! Notwendig ist eine Normierung desVektors auf die Lange 1:
||x1|| = 1 ⇒ x1 =1
2
" √3
1
#.
Analog bestimmt sich der 2. Eigenvektor x2 mit Hilfe des 2. Eigenwertes σ2
zu "4 − 1
√3√
3 2 − 1
#"x2
y2
#=
"0
0
#⇒ x2 =
1
2
"1
−√3
#.
Die Matrix der Eigenvektoren
A =h
x1 x2
i=
1
2
" √3
1
1
−√3
#
beschreibt die Hauptachsentransformation
σ∗ = AT
σA =
"5 0
0 1
#.
A.5 Ubungsaufgaben
Aufgabe A.1 (Schwierigkeitsgrad 1)
Berechnen Sie die Schwerpunktskoordinaten des abgebildeten gleichseitigenDreiecks mit der Seitenlange a.
Gegeben: a
a a
y
a
x
Losung:
xS =a
2, yS =
√3
6a

482 Anhang A Mathematische Grundlagen
Aufgabe A.2 (Schwierigkeitsgrad 2)
Bestimmen Sie die Schwerpunktskoordinaten einer Halbkugel mit dem Radius r.
Gegeben: r
y
xr
Losung:
yS =3
8r
Aufgabe A.3 (Schwierigkeitsgrad 2)
Wo liegt der Schwerpunkt des abgebildeten Rotationsparaboloids?Es handelt sich um eine quadratische Parabel.
Gegeben: R, h
����������������������������������������������������������������
����������������������������������������������������������������
R
y
h
xz
Losung:
xS = 0
yS = 13h
zS = 0
Aufgabe A.4 (Schwierigkeitsgrad 3)
Berechnen Sie die Schwerpunktskoordinaten fur die Linie y = x2 im Bereichx ∈ [0, 1].
Gegeben: siehe Skizze

A.5 Ubungsaufgaben 483
y = x2
x
yLosung:
x =
√5
12;
y =1
4
√125
2√
5 + ln(1 +q
54)− 1
16≈ 0.473
Aufgabe A.5 (Schwierigkeitsgrad 2)
Bestimmen Sie die Koordinate zS der Linienschwerpunkte.
Gegeben: siehe Skizze
10 cm
z 10 cm
10 cm
y
zy
a) b)Losung:
a) zS =20
3cm
b) zS =20
πcm
Aufgabe A.6 (Schwierigkeitsgrad 1)
Geben Sie die Schwerpunktskoordinaten (xS, yS) der folgenden Flachen an.
Gegeben: a, b
b2 b
xa
y y
a
bx
a
a2y
a
a
a a
a2
a
a
a
a2
x
b4
y
a2
a)
c) d)
b)
x
Losung:
a) xS =1
3b, yS =
1
3a
b) xS =41
44b, yS =
5
11a
c) xS =59
60a, yS =
59
60a
d) xS = − 1
60a, yS =
1
60a

484 Anhang A Mathematische Grundlagen
Aufgabe A.7 (Schwierigkeitsgrad 3)
Bestimmen Sie fur das skizzierte Profil die Tragheitsmomente Iy und Iz.
Gegeben: r
y
z
r
Losung:
Iy =πr4
8
Iz =πr4
8
Aufgabe A.8 (Schwierigkeitsgrad 2)
Fur den unten abgebildeten Hohlkasten ermittle man die Flachentragheitsmo-mente Iy, Iz, Iyz und Ip fur das im Schwerpunkt liegende Achsenkreuz.
Gegeben: h1 = 20 cm, h2 = 10 cm, h3 = 12 cm, h = 162 cm, b = 200 cm
z
S hh2
h3
h2
h1
y
b
Losung:
Iz = 4.482 · 107 cm4
Iy = 3.657 · 107 cm4
Ip = 8.139 · 107 cm4
Iyz = 0
Aufgabe A.9 (Schwierigkeitsgrad 2)
Bestimmen Sie fur den mit seinen Abmessungen dargestellten Bruckenquer-schnitt die Tragheitsmomente Iy und Iz.
Gegeben:

A.5 Ubungsaufgaben 485
z
y
20
[dm]12 10
2
3
S2
31
Losung:
Iy = 11424.7 dm4
Iz = 21989.4 dm4
Aufgabe A.10 (Schwierigkeitsgrad 1)
Berechnen Sie fur den dargestellten Querschnitt die Flachentragheitsmomen-te Iy und Iz bezuglich der Schwerpunktsachsen y und z.
Gegeben: a = 1 cm
6a
z
y
3a2a3a
Losung:
Iy = 79.2 cm4
Iz = 85.0 cm4
Aufgabe A.11 (Schwierigkeitsgrad 1)
Berechnen Sie fur den dargestellten Querschnitt das FlachentragheitsmomentIy bezuglich der Schwerpunktsachse y.
Gegeben: a
y
3a
4a
2a
2a
z
a
Losung:
Iy = 85.71 a4

486 Anhang A Mathematische Grundlagen
Aufgabe A.12 (Schwierigkeitsgrad 1)
Berechnen Sie fur den dargestellten Querschnitt die Flachentragheitsmomen-te Iy und Iz bezuglich der Schwerpunktsachsen y und z.
Gegeben: Maße in cm
1
1
6
1 2 2 1
y
z
Losung:
Iy = 216.0 cm4
Iz = 136.0 cm4
Aufgabe A.13 (Schwierigkeitsgrad 3)
Gesucht sind die Haupttragheitsmomente und die Lage der Haupttragheitsach-sen fur den gegebenen dunnwandigen Querschnitt.
Gegeben: b = 200 mm, h = 100 mm, t = s = 10 mm
b
hst
Losung:
I1 = 15452243 mm4
I2 = 1607870 mm4
ϕ∗ = −16.29◦

B Hilfsmittel
Zug/Druck Biegung
z
x
Verschiebung Schnittgroßen Verschiebung Schnittgroßen
u = 0 — w = 0, w′ = 0 —
u = 0 — w = 0 M = 0
— N = 0 w = 0 M = 0
u = 0 — w′ = 0 V = 0
— N = 0 w = 0, w′ = 0 —
— N = 0 — V = 0, M = 0
sprungR
L
Steifigkeits-
uL = uR —w′
L = w′R
wL = wR
—
Momenten-gelenk uL = uR — wL = wR ML = MR = 0
Querkraft-gelenk uL = uR — w′
L = w′R VL = VR = 0
Normalkraft-gelenk — NL = NR = 0
wL = wR
w′L = w′
R
—
Tabelle B.1 Rand- und Ubergangsbedingungen

488 Anhang B Hilfsmittel
��������
��������
ba
�
xA B
α =a
�, β =
b
�, ξ =
x
�
��������
��������
F
A B
EIw′A =
F�2
6
`−β3 + β´
EIw′B =
F�2
6
`α3 − α
´
EIw(x) =
8>>><>>>:F�3
6
ˆβ ξ`−ξ2 − β2 + 1
´˜fur x ≤ a
F�3
6
hβ ξ`−ξ2 − β2 + 1
´+ (ξ − α)3
ifur x ≥ a
��������
��������
q0
A B
EIw′A =
q0�3
24
EIw′B = − q0�3
24
EIw(x) =q0�4
24
`ξ4 − 2ξ3 + ξ
´
��������
��������
q0
A BEIw′
A =q0�3
24
`1 − β2
´2EIw′
B =q0�3
24
`β4 − 4 β3 + 4 β2 − 1
´
EIw(x) =
8>>><>>>:q0�4
24
hξ4 − 2
`1 − β2
´ξ3 +
`1 − β2
´2ξi
fur x ≤ a
q0�4
24
hξ4 − 2
`1 − β2
´ξ3 +
`1 − β2
´2ξ − (ξ − α)4
ifur x ≥ a
��������
��������
q0
BA
EIw′A =
7q0�3
360
EIw′B = − q0�3
45
EIw(x) =q0�4
360
`3 ξ5 − 10 ξ3 + 7 ξ
´
��������
��������
M0
A B
EIw′A =
M0�
6
`3 β2 − 1
´EIw′
B =M0�
6
`3 α2 − 1
´
EIw(x) =
8>>><>>>:M0�2
6
ˆξ3 +
`3 β2 − 1
´ξ˜
fur x ≤ a
M0�2
6
hξ3 +
`3 β2 − 1
´ξ − 3 (ξ − α)2
ifur x ≥ a
Tabelle B.2 Biegelinientafel fur Einfeldbalken

Anhang B Hilfsmittel 489
���
���
Bx
A
�
baα =
a
�, β =
b
�, ξ =
x
�
���
��� F
A B
EIw′A = 0
EIw′B =
Fa2
2
EIw(x) =
8>>><>>>:F�3
6
`−ξ3 + 3 α ξ2´
fur x ≤ a
F�3
6
h−ξ3 + 3 α ξ2 + (ξ − α)3
ifur x ≥ a
���
��� q0
A B
EIw′A = 0
EIw′B =
q0�3
6
EIw(x) =q0�4
24
`ξ4 − 4 ξ3 + 6 ξ2
´
���
��� q0
A B
EIw′A = 0
EIw′B =
q0�3
6
`β3 − 3 β2 + 3 β
´
EIw(x) =
8>>><>>>:q0�4
24
ˆ−4 β ξ3 + 6 β (2 − β) ξ2˜
fur x ≤ a
q0�4
24
h−4 β ξ3 + 6 β (2 − β) ξ2 + (ξ − α)4
ifur x ≥ a
���
���
q0
A B
EIw′A = 0
EIw′B =
q0�3
24
EIw(x) =q0�4
120
`−ξ5 + 5 ξ4 − 10 ξ3 + 10 ξ2´
���
��� M0
A B
EIw′A = 0
EIw′B = M0a
EIw(x) =
8>>><>>>:M0�2
2ξ2 fur x ≤ a
M0�2
2
`2 α ξ − α2
´fur x ≥ a
Tabelle B.3 Biegelinientafel fur Kragarm

490 Anhang B Hilfsmittel
g(x)
f(x) k
s
k k
s s
k k2s
k1
i i
ssik 1
2sik 1
2sik 1
2si(k1 + k2)
i
s
12sik 1
3sik 1
6sik 1
6si(k1 + 2k2)
i2
si1
12s(i1 + i2)k 1
6s(i1 + 2i2)k 1
6s(2i1 + i2)k 1
6s(2i1k1 + 2i2k2
+i1k2 + i2k1)
i
s
quadratisch
23sik 1
3sik 1
3sik 1
3si(k1 + k2)
i
s
quadratisch
23sik 5
12sik 1
4sik 1
12si(3k1 + 5k2)
i
s
quadratisch13sik 1
4sik 1
12sik 1
12si(k1 + 3k2)
i
s
kubisch14sik 1
5sik 1
20sik 1
20si(k1 + 4k2)
i
s
kubisch
38sik 11
40sik 1
10sik 1
40si(4k1 + 11k2)
i
s
kubisch14sik 2
15sik 7
60sik 1
60si(7k1 + 8k2)
Bei quadratischen Parabeln kennzeichnet ◦ den Scheitelpunkt der Parabel,bei kubischen Parabeln den Wendepunkt (Nullstelle der zweiten Ableitung)
Tabelle B.4 Werte der IntegraleR
(s)
f(x) g(x) dx

Anhang B Hilfsmittel 491
Rechteck
hS
z
y
b
y
A = bh
Iy =bh3
12
Iz =hb3
12Iyz = 0
Iy =bh3
3
Ip =bh
12(h2 + b2)
Quadrat
S
z
ya
a
y
A = a2
Iy = Iz =a4
12
Iyz = 0
Iy =a4
3
Ip =a4
6
IT = 0.140a4
WT = 0.208a3
Dreieck
hy S
zb
a
y
h
3
A =bh
2
Iy =bh3
36
Iz =bh
36(b2 − ba + a2)
Iyz =bh2
72(b − 2a)
Iy =bh3
12
Ip =bh
36(h2 + b2
−ba + a2)
Kreis
S
z
yR
y
A = πR2
Iy = Iz =πR4
4Iyz = 0
Iy =5πR4
4
Ip = IT =πR4
2
WT =πR3
2
dunner Kreisring
S
z
y
h
R
y
h � R
A=2πRh
Iy = Iz = πR3h
Iyz = 0
Iy = 3πR3h
Ip = IT = 2πR3h
WT = 2πR2h
Halbkreis
z
y SR
y
4
3πR
A =πR2
2
Iy =R4
72π(9π2 − 64)
Iz = Iy =πR4
8
Iyz = 0
Ip =πR4
36π(9π2 − 32)
Ellipse
z
y
b
a
y
SA = πab
Iy =π
4ab3
Iz =π
4ba3
Iyz = 0
Iy =5π
4ab3
Ip =πab
4(a2 + b2)
IT = πa3b3
a2 + b2
WT =a2b
2(a > b)
Tabelle B.5 Flachenmaße einfacher Geometrien

492 Anhang B Hilfsmittel
Geometrie Massentragheitsmomente
Punktmasse
a
�
mΘa = m�2
dunner Stab
S
a
a
s
s
�
Θs =m�2
12
Θa =m�2
3
Quader
S
s
sa
a
d
b
c
Θs =1
12m`b2 + d2
´Θa = m
„1
3b2 +
1
12d2
«
Kreiszylinder
s
S
b b
a
a s
�
r
Θs =1
2mr2
Θa =3
2mr2
Θb =1
4mr2 +
1
12m�2
dunne Kreisscheibe
S
a
a
s
s
r
Θs =1
2mr2
Θa =1
4mr2
Kugel
S
a
a
r
Θs =2
5mr2
Θa =7
5mr2
Tabelle B.6 Massentragheitsmomente einfacher Korper mit konstanter Dichte

C Englische Fachbegriffe
Als Hilfe zum Verstandnis englischer Fachliteratur ist im Folgenden eine Ubersicht derwichtigsten Begriffe der Mechanik in englischer und deutscher Sprache wiedergegeben.Hinter dem deutschen Begriff ist in Klammern jeweils die Nummer des entsprechen-den Kapitels angegeben, sie ermoglicht ein Nachschlagen des Zusammenhangs, in demder jeweilige Begriff verwendet wird. Um das rasche Auffinden der Begriffe in beidenSprachen zu ermoglichen, ist die gesamte Vokabelliste zunachst englisch–deutsch undanschließend deutsch–englisch abgedruckt.
Zur vertieften Einarbeitung in die englische Fachsprache eignet sich auch die englische
Version dieses Buches, die zurzeit in Arbeit ist und nach Fertigstellung im Internet
unter www.tm-kompakt.de zum Download bereitgestellt wird.
Englisch–deutsche Vokabelubersicht
acceleration Beschleunigung (18)amplitude Amplitude (21)angular frequency Kreisfrequenz (21)angular momentum Drall (20)angular momentum Drehimpuls (20)angular velocity Winkelgeschwindigkeit (18)arch Bogentrager (6)area Flacheninhalt (A)area Flache (A)at-rest position statische Ruhelage (21)axial force Normalkraft (6)axial moment of inertia Massentragheitsmoment (20)axial stiffness Dehnsteifigkeit (7)axial stress Axialspannung (8)axiom Axiom (1)bar Stab (11)base excitation Fußpunktanregung (21)beam Balken (6)bearing Lager (3)bending Biegung (12)bending moment Biegemoment (6)bending stiffness Biegesteifigkeit (12)body Korper (1)boundary condition Randbedingung (12)

494 Anhang C Englische Fachbegriffe
brittle sprode (17)buckling Knicken (16)cantilever beam Kragarm (B)Cartesian coordinates Kartesische Koordinaten (18)center of gravity Schwerpunkt (5)central system of forces zentrales Kraftesystem (2)centripetal acceleration Zentripetalbeschleunigung (18)centroid geometrischer Schwerpunkt (A)centroidal axis Schwerachse (12)chain Kette (6)circular arc Kreisbogentrager (6)circular motion Kreisbewegung (18)circular tube Kreisrohr (13)coefficient of restitution Stoßzahl (19)composite beam Verbundbalken (14)compression Druckspannung (11)compression Kompression (19)compression force Druckkraft (4)conservation of energy Energieerhaltung (20)conservation of momentum Impulserhaltung (19)conservative force konservative Kraft (20)continuum Kontinuum (1)coordinate system Koordinatensystem (18)critical load kritische Last (16)critically damped kritische Dampfung (21)critically damped state aperiodischer Grenzfall (21)curvature Krummung (12)curved beam gekrummter Balken (6)cylinder coordinates Zylinderkoordinaten (18)damped vibration gedampfte Schwingung (21)damper Dampfer (21)damping Dampfung (21)damping coefficient Dampferkonstante (21)damping ratio Dampfungsgrad (21)deflection curve Biegelinie (12)deformation energy Formanderungsenergie (15)degree of freedom Freiheitsgrad (3)density Dichte (5)displacement Verschiebung (9)displacement vector Verschiebungsvektor (9)displacement-time graph Weg-Zeit-Diagramm (21)distributed load verteilte Last (5)ductile duktil (17)dynamics Dynamik (1)eigenfrequency Eigenfrequenz (21)elastic elastisch (19)elastic modulus Elastizitatsmodul (7)elastic section modulus Widerstandsmoment (12)elastostatics Elastostatik (7)elongation Verlangerung (11)

Anhang C Englisch–deutsche Vokabelubersicht 495
energy dissipation Energieverlust (19)energy method Energiemethode (15)energy theorem Arbeitssatz (15)equation of motion Bewegungsgleichung (20)equilibrium Gleichgewicht (3)equivalent stress Vergleichsspannung (17)excitation Anregung (21)finite elements Finite Elemente (15)fixed support Festlager (3)flexure Biegung (12)force Kraft (2)force of impact Kraftstoß (19)forced vibration erzwungene Schwingung (21)frame Rahmen (6)free vibration freie Schwingung (21)free-body diagram Freikorperbild (3)frequency Frequenz (21)frequency ratio Frequenzverhaltnis (21)friction Reibung (19)friction of ropes Seilreibung (19)gravitation force Gewichtskraft (5)gravitational acceleration Erdbeschleunigung (5)harmonic excitation harmonische Anregung (21)harmonic oscillation harmonische Schwingung (21)harmonic vibration harmonische Schwingung (21)hinge Gelenk (3)hinged bar Pendelstab (3)hinged column Pendelstutze (3)homogeneous homogen (10)Hooke’s law Hookesches Gesetz (10)hydrostatic state of stress hydrostatischer Spannungszustand (8)imbalance excitation Unwuchtanregung (21)impact Stoß (19)inclined plane schiefe Ebene (20)indifferent indifferent (16)initial condition Anfangsbedingung (21)instantaneous center of rotation Momentanpol (20)internal forces and moments Schnittgroßen (6)isotropic isotrop (10)joint Gelenk (3)kinematically indeterminated kinematisch unbestimmt (3)kinematics Kinematik (18)kinetic energy kinetische Energie (19)kinetics Kinetik (19)lever arm Hebelarm (2)line load Linienlast (5)line load Streckenlast (5)line of action Wirkungslinie (2)linear motion geradlinige Bewegung (18)load Last (5)

496 Anhang C Englische Fachbegriffe
logarithmic decrement logarithmisches Dekrement (21)magnification factor Vergroßerungsfunktion (21)mass Masse (19)matching condition Ubergangsbedingung (12)material equation Materialgleichung (10)material equation Stoffgleichung (10)material property Werkstoffkennwert (10)mathematical pendulum mathematisches Pendel (21)mechanical work mechanische Arbeit (15)mechanics Mechanik (1)method of joints Knotenpunktverfahren (4)method of sections Schnittprinzip (3)method of sections (truss) Ritter-Schnitt-Verfahren (Fachwerk) (4)model Modell (1)Mohr’s circle of inertia Mohrscher Tragheitskreis (A)Mohr’s circle of stress Mohrscher Spannungskreis (8)moment Moment (2)moment of inertia Flachentragheitsmoment (A)momentum Impuls (19)motion Bewegung (18)natural coordinates naturliche Koordinaten (18)natural frequency Eigenfrequenz (21)neutral axis Spannungsnulllinie (12)neutral axis neutrale Faser (12)node Knoten (4)normal stress Normalspannung (8)oblique centric impact schiefer zentrischer Stoß (19)oscillation Schwingung (21)overdamped stark gedampft (21)parallel connection Parallelschaltung (21)parallel-axis theorems Steinersche Satze (A)parallelogram of forces Krafteparallelogramm (2)pendulum Pendel (21)period Periode (21)period Schwingungsdauer (21)phase angle Phasenverschiebung (21)phase angle Phasenwinkel (21)planar impact ebener Stoß (20)plane bending ebene Biegung (12)plane stress ebener Spannungszustand (8)plane stress ebener Verzerrungszustand (9)plastic plastisch (19)point mass Massenpunkt (19)point of application Angriffspunkt (2)Poisson’s ratio Querkontraktionszahl (10)polar coordinates Polarkoordinaten (18)polar moment of inertia polares Flachentragheitsmoment (A)position vector Ortsvektor (18)potential Potential (19)potential energy potentielle Energie (15)

Anhang C Englisch–deutsche Vokabelubersicht 497
power Leistung (19)preservation of shape Formtreue (13)pressure Druck (5)pressure vessel Kessel (8)principal axis Hauptachse (A)principal moment of inertia Haupttragheitsmoment (A)principal strain Hauptdehnung (9)principal stress Hauptspannung (8)principle Prinzip (1)product of inertia Deviationsmoment (A)projectile motion schiefer Wurf (19)pulley Seilrolle (3)pure bending reine Biegung (12)quantity Große (1)radial velocity Radialgeschwindigkeit (18)reaction force Reaktionskraft (3)reaction of joint Gelenkreaktion (3)relative angle-of-twist Drillung (13)resonance Resonanz (21)response Antwort (21)response of a system Systemantwort (21)restitution Restitution (19)resultant Resultierende (2)rigid body starrer Korper (2)rigid body motion Starrkorperbewegung (20)rod Stab (4)roller support Loslager (3)rope Seil (3)rope line Seillinie (6)rotation Rotation (20)section Schnittufer (6)self-weight Eigengewicht (6)sense (of a moment) Drehsinn (eines Moments) (2)series connection Reihenschaltung (21)shear Schub (13)shear center Schubmittelpunkt (13)shear flow Schubfluss (13)shear force Querkraft (6)shear modulus Schubmodul (10)shear stress Schubspannung (8)shearing strain Gleitung (9)sign convention Vorzeichenkonvention (8)simply supported beam Einfeldbalken (B)skew bending schiefe Biegung (12)slide bearing Gleitlager (3)slipping Gleiten (19)specific weight spezifisches Gewicht (5)spring Feder (16)spring combination Federschaltung (21)spring constant Federkonstante (16)

498 Anhang C Englische Fachbegriffe
stability Stabilitat (16)stable stabil (16)state of stress Spannungszustand (8)static moment statisches Moment (A)statical determined statisch bestimmt (3)statical determinism statische Bestimmtheit (3)statical indetermined statisch unbestimmt (3)statics Statik (1)sticking Haften (19)sticking coefficient Haftzahl (19)stiffness Steifigkeit (7)straight centric impact gerader zentrischer Stoß (19)strain Dehnung (9)strain Verzerrung (9)strain tensor Verzerrungstensor (9)strength of materials Festigkeitslehre (17)stress Beanspruchung (17)stress Spannung (8)stress tensor Spannungstensor (8)superposition Uberlagerung (14)superposition Superposition (14)support Lager (3)support reaction Lagerreaktion (3)surface load Flachenlast (5)surface load Oberflachenlast (5)symmetric cross section symmetrisches Profil (A)symmetry Symmetrie (A)tangent Tangente (18)tangential velocity Bahngeschwindigkeit (18)temperature Temperatur (10)tensile force Zugkraft (4)tensile test Zugversuch (10)tension Zugspannung (11)thermal expansion Warmedehnung (10)thin-walled dunnwandig (13)torque Torsionsmoment (13)torsion Torsion (13)torsion stiffness Torsionssteifigkeit (13)torsional moment Torsionsmoment (13)torsional spring Drehfeder (16)transient motion Einschwingvorgang (21)truss Fachwerk (4)undamped motion ungedampfte Bewegung (21)underdamped schwach gedampft (21)unit Einheit (1)unloaded truss Nullstab (4)unstable labil (16)velocity Geschwindigkeit (18)vibration Schwingung (21)virtual displacement virtuelle Verruckung (15)

Anhang C Deutsch–englische Vokabelubersicht 499
virtual force virtuelle Kraft (15)virtual work virtuelle Arbeit (15)viscous damping viskose Dampfung (21)volumetric moment of inertia Volumentragheitsmoment (A)warp Verwolbung (13)warping torsion Wolbkrafttorsion (13)weight Gewicht (5)weight force Schwerkraft (5)work Arbeit (15)yield criterion Beanspruchungshypothese (17)Young’s modulus Elastizitatsmodul (7)
Deutsch–englische Vokabelubersicht
Amplitude (21) amplitudeAnfangsbedingung (21) initial conditionAngriffspunkt (2) point of applicationAnregung (21) excitationAntwort (21) responseaperiodischer Grenzfall (21) critically damped stateArbeit (15) workArbeitssatz (15) energy theoremAxialspannung (8) axial stressAxiom (1) axiomBahngeschwindigkeit (18) tangential velocityBalken (6) beamBeanspruchung (17) stressBeanspruchungshypothese (17) yield criterionBeschleunigung (18) accelerationBewegung (18) motionBewegungsgleichung (20) equation of motionBiegelinie (12) deflection curveBiegemoment (6) bending momentBiegesteifigkeit (12) bending stiffnessBiegung (12) bendingBiegung (12) flexureBogentrager (6) archDampfer (21) damperDampferkonstante (21) damping coefficientDampfung (21) dampingDampfungsgrad (21) damping ratioDehnsteifigkeit (7) axial stiffnessDehnung (9) strainDeviationsmoment (A) product of inertiaDichte (5) densityDrall (20) angular momentumDrehfeder (16) torsional springDrehimpuls (20) angular momentumDrehsinn (eines Moments) (2) sense (of a moment)

500 Anhang C Englische Fachbegriffe
Drillung (13) relative angle-of-twistDruck (5) pressureDruckkraft (4) compression forceDruckspannung (11) compressiondunnwandig (13) thin-walledduktil (17) ductileDynamik (1) dynamicsebene Biegung (12) plane bendingebener Spannungszustand (8) plane stressebener Stoß (20) planar impactebener Verzerrungszustand (9) plane stressEigenfrequenz (21) eigenfrequencyEigenfrequenz (21) natural frequencyEigengewicht (6) self-weightEinfeldbalken (B) simply supported beamEinheit (1) unitEinschwingvorgang (21) transient motionelastisch (19) elasticElastizitatsmodul (7) Young’s modulusElastizitatsmodul (7) elastic modulusElastostatik (7) elastostaticsEnergieerhaltung (20) conservation of energyEnergiemethode (15) energy methodEnergieverlust (19) energy dissipationErdbeschleunigung (5) gravitational accelerationerzwungene Schwingung (21) forced vibrationFachwerk (4) trussFeder (16) springFederkonstante (16) spring constantFederschaltung (21) spring combinationFestigkeitslehre (17) strength of materialsFestlager (3) fixed supportFinite Elemente (15) finite elementsFlachenlast (5) surface loadFlache (A) areaFlacheninhalt (A) areaFlachentragheitsmoment (A) moment of inertiaFormtreue (13) preservation of shapeFormanderungsenergie (15) deformation energyfreie Schwingung (21) free vibrationFreiheitsgrad (3) degree of freedomFreikorperbild (3) free-body diagramFrequenz (21) frequencyFrequenzverhaltnis (21) frequency ratioFußpunktanregung (21) base excitationgedampfte Schwingung (21) damped vibrationgekrummter Balken (6) curved beamGelenk (3) hingeGelenk (3) jointGelenkreaktion (3) reaction of joint

Anhang C Deutsch–englische Vokabelubersicht 501
geometrischer Schwerpunkt (A) centroidgerader zentrischer Stoß (19) straight centric impactgeradlinige Bewegung (18) linear motionGeschwindigkeit (18) velocityGewicht (5) weightGewichtskraft (5) gravitation forceGleichgewicht (3) equilibriumGleiten (19) slippingGleitlager (3) slide bearingGleitung (9) shearing strainGroße (1) quantityHaften (19) stickingHaftzahl (19) sticking coefficientharmonische Anregung (21) harmonic excitationharmonische Schwingung (21) harmonic oscillationharmonische Schwingung (21) harmonic vibrationHauptachse (A) principal axisHauptdehnung (9) principal strainHauptspannung (8) principal stressHaupttragheitsmoment (A) principal moment of inertiaHebelarm (2) lever armhomogen (10) homogeneousHookesches Gesetz (10) Hooke’s lawhydrostatischer Spannungszustand (8) hydrostatic state of stressImpuls (19) momentumImpulserhaltung (19) conservation of momentumindifferent (16) indifferentisotrop (10) isotropicKartesische Koordinaten (18) Cartesian coordinatesKessel (8) pressure vesselKette (6) chainKinematik (18) kinematicskinematisch unbestimmt (3) kinematically indeterminatedKinetik (19) kineticskinetische Energie (19) kinetic energyKnicken (16) bucklingKnoten (4) nodeKnotenpunktverfahren (4) method of jointsKorper (1) bodyKompression (19) compressionkonservative Kraft (20) conservative forceKontinuum (1) continuumKoordinatensystem (18) coordinate systemKrafteparallelogramm (2) parallelogram of forcesKraft (2) forceKraftstoß (19) force of impactKragarm (B) cantilever beamKreisbewegung (18) circular motionKreisbogentrager (6) circular arcKreisfrequenz (21) angular frequency

502 Anhang C Englische Fachbegriffe
Kreisrohr (13) circular tubekritische Dampfung (21) critically dampedkritische Last (16) critical loadKrummung (12) curvaturelabil (16) unstableLager (3) bearingLager (3) supportLagerreaktion (3) support reactionLast (5) loadLeistung (19) powerLinienlast (5) line loadlogarithmisches Dekrement (21) logarithmic decrementLoslager (3) roller supportMasse (19) massMassenpunkt (19) point massMassentragheitsmoment (20) axial moment of inertiaMaterialgleichung (10) material equationmathematisches Pendel (21) mathematical pendulumMechanik (1) mechanicsmechanische Arbeit (15) mechanical workModell (1) modelMohrscher Spannungskreis (8) Mohr’s circle of stressMohrscher Tragheitskreis (A) Mohr’s circle of inertiaMoment (2) momentMomentanpol (20) instantaneous center of rotationnaturliche Koordinaten (18) natural coordinatesneutrale Faser (12) neutral axisNormalkraft (6) axial forceNormalspannung (8) normal stressNullstab (4) unloaded trussOberflachenlast (5) surface loadOrtsvektor (18) position vectorParallelschaltung (21) parallel connectionPendel (21) pendulumPendelstab (3) hinged barPendelstutze (3) hinged columnPeriode (21) periodPhasenverschiebung (21) phase anglePhasenwinkel (21) phase angleplastisch (19) plasticpolares Flachentragheitsmoment (A) polar moment of inertiaPolarkoordinaten (18) polar coordinatesPotential (19) potentialpotentielle Energie (15) potential energyPrinzip (1) principleQuerkontraktionszahl (10) Poisson’s ratioQuerkraft (6) shear forceRadialgeschwindigkeit (18) radial velocityRahmen (6) frameRandbedingung (12) boundary condition

Anhang C Deutsch–englische Vokabelubersicht 503
Reaktionskraft (3) reaction forceReibung (19) frictionReihenschaltung (21) series connectionreine Biegung (12) pure bendingResonanz (21) resonanceRestitution (19) restitutionResultierende (2) resultantRitter-Schnitt-Verfahren (Fachwerk) (4) method of sections (truss)Rotation (20) rotationschiefe Biegung (12) skew bendingschiefe Ebene (20) inclined planeschiefer Wurf (19) projectile motionschiefer zentrischer Stoß (19) oblique centric impactSchnittgroßen (6) internal forces and momentsSchnittprinzip (3) method of sectionsSchnittufer (6) sectionSchub (13) shearSchubfluss (13) shear flowSchubmittelpunkt (13) shear centerSchubmodul (10) shear modulusSchubspannung (8) shear stressschwach gedampft (21) underdampedSchwerachse (12) centroidal axisSchwerkraft (5) weight forceSchwerpunkt (5) center of gravitySchwingung (21) oscillationSchwingung (21) vibrationSchwingungsdauer (21) periodSeil (3) ropeSeillinie (6) rope lineSeilreibung (19) friction of ropesSeilrolle (3) pulleySpannung (8) stressSpannungsnulllinie (12) neutral axisSpannungstensor (8) stress tensorSpannungszustand (8) state of stressspezifisches Gewicht (5) specific weightsprode (17) brittleStab (11) barStab (4) rodstabil (16) stableStabilitat (16) stabilitystark gedampft (21) overdampedstarrer Korper (2) rigid bodyStarrkorperbewegung (20) rigid body motionStatik (1) staticsstatisch bestimmt (3) statical determinedstatisch unbestimmt (3) statical indeterminedstatische Bestimmtheit (3) statical determinismstatische Ruhelage (21) at-rest position

504 Anhang C Englische Fachbegriffe
statisches Moment (A) static momentSteifigkeit (7) stiffnessSteinersche Satze (A) parallel-axis theoremsStoffgleichung (10) material equationStoß (19) impactStoßzahl (19) coefficient of restitutionStreckenlast (5) line loadSuperposition (14) superpositionSymmetrie (A) symmetrysymmetrisches Profil (A) symmetric cross sectionSystemantwort (21) response of a systemTangente (18) tangentTemperatur (10) temperatureTorsion (13) torsionTorsionsmoment (13) torqueTorsionsmoment (13) torsional momentTorsionssteifigkeit (13) torsion stiffnessUbergangsbedingung (12) matching conditionUberlagerung (14) superpositionungedampfte Bewegung (21) undamped motionUnwuchtanregung (21) imbalance excitationVerbundbalken (14) composite beamVergleichsspannung (17) equivalent stressVergroßerungsfunktion (21) magnification factorVerlangerung (11) elongationVerschiebung (9) displacementVerschiebungsvektor (9) displacement vectorverteilte Last (5) distributed loadVerwolbung (13) warpVerzerrung (9) strainVerzerrungstensor (9) strain tensorvirtuelle Arbeit (15) virtual workvirtuelle Kraft (15) virtual forcevirtuelle Verruckung (15) virtual displacementviskose Dampfung (21) viscous dampingVolumentragheitsmoment (A) volumetric moment of inertiaVorzeichenkonvention (8) sign conventionWarmedehnung (10) thermal expansionWeg-Zeit-Diagramm (21) displacement-time graphWerkstoffkennwert (10) material propertyWiderstandsmoment (12) elastic section modulusWinkelgeschwindigkeit (18) angular velocityWirkungslinie (2) line of actionWolbkrafttorsion (13) warping torsionzentrales Kraftesystem (2) central system of forcesZentripetalbeschleunigung (18) centripetal accelerationZugkraft (4) tensile forceZugspannung (11) tensionZugversuch (10) tensile testZylinderkoordinaten (18) cylinder coordinates

Abbildungsnachweis
Die Wiedergabe der aufgefuhrten Abbildungen erfolgt mit freundlicher Genehmigungdes jeweiligen Rechteinhabers bzw. Verlages.
Bild 3.1: Sascha Beuermann
Bild 3.5: Sascha Beuermann; Eisenbahnbrucke uber die Leine von 1975, Hannover
Bild 3.9: Sascha Beuermann; Messehalle 13, Messegelande Hannover
Bild 4.1: Sascha Beuermann; Brucke des 25. April uber den Tejo, Lissabon (1966)
Bild 5.1: Holger Spiess
Bild 6.1: Ing.-Software Dlubal GmbH, Tiefenbach
Bild 6.6: Hans Straub; Gmundertobelbrucke uber die Sitter bei Teufel, Schweiz (1908),aus Straub, Hans: Die Geschichte der Bauingenieurkunst, erschienen im BirkhauserVerlag
Bild 8.1: Jochen Naumann, Institut fur Mechanik, Technische Universitat Chemnitz
Bild 10.1: Sascha Beuermann; Zugversuch am Institut fur Baustoffe, Universitat Han-nover
Bild 11.1: Sascha Beuermann; Messehalle 27, Messegelande Hannover
Bild 12.1: Holger Spiess
Bild 12.2: Holger Spiess
Bild 13.1: Sascha Beuermann; Versuchskorper am Institut fur Stahlbau, UniversitatHannover
Bild 13.21: Rolf Lammering, Institut fur Mechanik, Helmut-Schmidt-Universitat, Ham-burg
Bild 15.1: DaimlerChrysler AG, Sindelfingen, 2005; Crashsimulation des Frontalauf-pralls eines PKW
Bild 16.1: Sascha Beuermann; Knickversuch am Institut fur Stahlbau, Universitat Han-nover
Bild 17.1: Andrea Hildebrand, Institut fur Baustoffe, Universitat Hannover
Bild 18.1: Heide-Park Soltau GmbH, Soltau
Bild 20.5: Firma Hagedorn GmbH Abbruch und Bauschuttaufbereitung, Gutersloh
Bild 21.1: The Camera Shop, 1007 Pacific Ave, Tacoma WA 98402, USA
P. Wriggers, et al., Technische Mechanik kompakt, DOI 10.1007/978-3-8351-9066-5,© B. G. Teubner Verlag / GWV Fachverlage GmbH, Wiesbaden 2006

Symbolverzeichnis
Grundsatzliche Schreibweise
Skalare werden kursiv dargestellt (z. B. A), Vektoren durch fett-kursive Buchstaben(beispielsweise v), Matrizen durch i. d. R. Großbuchstaben, die fett und aufrecht dar-gestellt sind (z. B. I).
Verzeichnis wichtiger Symbole
Im Folgenden sind Symbole aufgefuhrt, die in der Mechanik verwendet werden. DieSymbole sind alphabetisch sortiert, zunachst nach lateinischen Buchstaben, anschlie-ßend nach griechischen.
A Querschnittsflache
Ai ideelle Querschnittsflache
Am von Profilmittellinie einge-schlossene Flache
a Wertigkeit eines Lagers
a Beschleunigung
a Beschleunigungsvektor
ar Radialbeschleunigung
aϕ Zirkularbeschleunigung
b Massenkraftdichte
C Amplitude
c Federkonstante
D Dampfungsgrad
E Elastizitatsmodul
e Stoßzahl
eM Lage des Schubmittelpunkts
ex, ey ,ez
Basiseinheitsvektoren
f Volumenkraft
F Kraft
FR Resultierende Kraft
Fkrit kritische Last
F (t) zeitabhangige Kraft
F Kraftstoß
f Stichhohe, Durchhang
f Gesamtverschiebung
f Frequenz
f Volumenkraftdichte
G Gewichtskraft
G Schubmodul
g Gravitationskonstante
H Betrag der Haftkraft
h Scheibendicke
Iy , Iz axiale Flachentragheitsmo-mente
Iyz Deviationsmoment der Fla-che
Ip polares Flachentragheitsmo-ment
Iξ, Iη transformierte Flachentrag-heitsmomente
Iξη transformiertes Deviations-moment
II , III Haupttragheitsmomente
Ii ideelles Flachentragheitsmo-ment
IT Torsionstragheitsmoment
i Tragheitsradius
K Stoßebene
k Anzahl der Knoten in einemFachwerk
L Drehimpuls
M Moment
MR resultierendes Moment
P. Wriggers, et al., Technische Mechanik kompakt, DOI 10.1007/978-3-8351-9066-5,© B. G. Teubner Verlag / GWV Fachverlage GmbH, Wiesbaden 2006

Symbolverzeichnis 507
M(0)
Momentenstoß
MT Torsionsmoment
m Masse
m Streckenmoment
N Normalkraft
n Anzahl der Teilsysteme
n Anzahl der Stabe in einemFachwerk
n Streckennormallast
N Stoßnormalenrichtung
n Richtungsvektor
P Leistung
p Impuls
p Druck
q Streckenlast
R Reibkraft
Rm Radius der Profilmittellinie
r Radius
r Anzahl der Lagerreaktionenin einem Fachwerk
r Ortsvektor
r⊥ Hebelarm
S Schwerpunkt
S Seil-/Stabkraft
Si ideeller Schwerpunkt
Sy , Sz statisches Moment
s Kurvenparameter
s Bahngeschwindigkeit
s Bahnbeschleunigung
T Temperatur
T Schwingungsdauer
t Schubfluss
t Zeit
t Spannungsvektor
t Oberflachenspannungen
U Umfang
U potentielle Energie
UG Gestaltanderungsenergie
UV Volumenanderungsarbeit
u Verschiebung in x-Richtung
V Querkraft
V Volumen
v Verschiebung in y-Richtung
v Geschwindigkeit
v Geschwindigkeitsvektor
vr Radialgeschwindigkeit
vϕ Zirkulargeschwindigkeit
W Widerstandsmoment
W mechanische Arbeit
WT Torsionswiderstandsmoment
w Verschiebung in z-Richtung
xS, yS,zS
Koordinaten des Schwer-punktes
z Wertigkeit eines Gelenks
γ spezifisches Gewicht
γ Gleitung
δ Abklingkonstante
ε Dehnung
ϑ Drillung
Θ Tragheitsmoment
κ Schubflachenfaktor
μH Haftzahl
μR Reibzahl
ν Querdehnzahl
Π Momentanpol
� Krummungsradius
� Dichte
σ Spannung
σm mittlere Spannung
σzul zulassige Spannung
σ1, σ2 Hauptspannungen
σi ideelle Spannung
σξ, ση ,τξη
transformierte Spannungen
σGV von Mises-Vergleichsspan-
nung
σSV Tresca-Vergleichsspannung
σZV maximale Zugnormalspan-
nung
τ Schubspannung
ϕ Phasenwinkel
ϕ0, ϕ1 Richtungen der Hauptspan-nungen
ψ Verdrehung
ω Kreisfrequenz
ω Winkelgeschwindigkeit
ωd Kreisfrequenz der gedamp-ften Schwingung

Stichwortverzeichnis
Tritt ein Stichwort nicht als Hauptbegriff auf, so sollte zunachst nach einem Oberbegriffgesucht werden, unter dem das gesuchte Stichwort evtl. als Untereintrag zu finden ist.Seitenzahlen, die bei den nachfolgenden Stichwortern fett dargestellt sind, verweisenauf diejenigen Stellen, an denen der zugehorige Begriff weitergehend behandelt wird.
A
Abklingkonstante. . . . . . .414, 416, 417
Abzahlformel . . . . . . . . . . . . . . . . . . . . . . 47
bei Fachwerken . . . . . . . . . . . . . . . 60
Amplitude . . . . . . . . . . . . . . . . . . . 405, 410
Anfangsbedingung . . . . . . . . . . . . . . . . 409
Angriffspunkt . . . . . . . . . . . . . . . . . . 17, 22
Anregung
Dampferkraftanregung . . . . . . 434
Fußpunktanregung . . . . . . . . . . 437
Kraftanregung . . . . . . . . . 429, 431
Unwuchtanregung . . . . . . . . . . . 435
Weganregung . . . . . . . . . . . . . . 432f.
Antwort . . . . . . . . . . . . . . . . . . . . . . . . . . 427
aperiodischer Grenzfall . . . . . . . . . . . 417
Arbeit . . . . . . . . . . . . . . . . . . . . . . . . . . . .281
Arbeitssatz. . .281, 348, 384, 386
Auflager . . . . . . . . . . . . . . . . . . . . . s. Lager
Ausnahmefall . . . . . . . . . . . . . . . . . . . . . . 47
Axialspannung . . . . . . . . . . . . . . . . . . . 133
Axiom. . . . . . . . . . . . . . . . . . . . .14, 18, 33
Dynamisches Grundgesetz . . . . 34
Gleichgewichtsaxiom . . . . . . . . . 33
Reaktionsaxiom . . . . . . . . . . . . . . 34
B
Bahn
Bahnbeschleunigung . . . . . . . . 337
Bahngeschwindigkeit . . . . . . . . 337
Balken . . . . . . . . . . . . . . . . . . . . . . . . . . .175
Balkenachse . . . . . . . 176, 178, 196
Einfeldbalken . . . . . . . . . . . . . . . 488
gekrummter . . . . . . . . . . . . . . . . . . 94
Verbundbalken . . . . . . . . . . . . . . 262
Beanspruchung
kombinierte . . . . . . . . . . . . . . . . . 248
Beanspruchungshypothese
max. Gestaltanderungsenergie328
max. Schubspannung . . . . . . . . 327
max. Zugnormalspannung . . . 327
begleitendes Dreibein . . . . . . . . . . . . . 336
Bemessung . . . . . . . . . . . . . . . . . . 164, 258
Bernoulli-Hypothese . . . . 176, 195, 263
Beschleunigung . . . . . . . . . . . . . . . . . . . 335
Bahnbeschleunigung . . . . . . . . 337
Radialbeschleunigung . . . . . . . 338
Zirkularbeschleunigung. . . . . . 338
Betrag . . . . . . . . . . . . . . . . . . . . . . . . 17, 476
Bewegung . . . . . . . . . . . . . . . . . . . . . . . . .13
des starren Korpers . . . . . . . . . 374
geradlinige . . . . . . . . . . . . . . . . . . 337
in Polarkoordinaten . . . . . . . . . 338
Kreisbewegung . . . . . . . . . . . . . . 339
Bewegungsgleichung . . . . . . . . . . . . . . 404
Bewegungsgleichungen . . . . . . . 377, 388
Newtonsche . . . . . . . . . . . . . . . . . 345
Biegelinie. . . . . . . . . . . . . . . . . . . . . . . . .179
Biegelinientafel . . . . . . . 192, 488f.
Differentialgleichung . . . . . . . . 178
Biegemoment . . . . . . . . . . . . 81, 178, 249
Biegesteifigkeit . . . . . . . . . . . . . . . . . . . 178
ideelle . . . . . . . . . . . . . . . . . . 265, 269
Biegung . . . . . . . . . . . . . . . . . . . . .175, 249
ebene . . . . . . . . . . . . . . . . . .176, 263
schiefe . . . . . . . . . . . . . . . . . . . . . .194
Bogentrager . . . . . . . . . . . . . . . . . . . . . . . 94
Kreisbogentrager . . . . . . . . . . . . . 94
P. Wriggers, et al., Technische Mechanik kompakt, DOI 10.1007/978-3-8351-9066-5,© B. G. Teubner Verlag / GWV Fachverlage GmbH, Wiesbaden 2006

Stichwortverzeichnis 509
momentenfreier . . . . . . . . . . . . . . 96Bredtsche Formel . . . . . . . . . . . . 226, 228
D
Dampfer . . . . . . . . . . . . . . . . . . . . . . . . . 413Dampferkonstante. . . . . . . . . . .413Weganregung uber Dampfer . 433
Dampfung . . . . . . . . . . . . . . . . . . . . . . . 413
Dampfungsgrad . . . . . . . . . . . . . 415Dampfungsmaß . . . . . . . . . . . . . 417kritische . . . . . . . . . . . . . . . . . . . . 418schwache . . . . . . . . . . . . . . . . . . . . 415starke . . . . . . . . . . . . . . . . . . . . . . . 417viskose . . . . . . . . . . . . . . . . . . . . . . 413
dunne Kreisscheibe . . . . . . . . . . . . . . . 492dunner Stab . . . . . . . . . . . . . . . . . . . . . . 492dunnwandiger Querschnitt . . 216, 225,
232Dampfungsgrad . . . . . . . . . . . . . . . . . . 417dunner Kreisring . . . . . . . . . . . . . . . . . 491De Saint Venant . . . . . . . . . . . . . . . . . . 163Dehnsteifigkeit . . . . . . . . . . . . . . . . . . . 114
ideelle . . . . . . . . . . . . . . . . . . 265, 269Dehnung . . . . . . . . . . . . . . . . . . . . . . . . . 113
Hauptdehnung . . . . . . . . . . . . . . 143Determinantenkriterium . . . . . . . 49, 60Deviationsmoment. . . . . . . . . . . . . . . .460Dichte . . . . . . . . . . . . . . . . . . . . . . . . . 66, 70
Dichteverteilung. . . . . . . . . . . . . .68Differentialgleichung
der Biegelinie . . . . . . . . . . 178, 192der ebenen Biegung . . . . . . . . . 176der schiefen Biegung . . . 195, 197
der Schnittgroßen . . . . . . . . . . . . 87der Torsionsverformung . . . . . 223des momentenfreien Tragers . . 98des Seils . . . . . . . . . . . . . . . . . . . . 100des Stabes . . . . . . . . . . . . . 114, 166fur Verbundquerschnitte. . . . .266
Dimensionierung . . . . . . . . . . . . . . . . 163f.Doppel-T-Trager . . . . . . . . . . . . . . . . . 189Drall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382
Drallsatz . . . . . . . . . . . . . . . . . . . . 382Drehimpulssatz . . . . . . . . . . . . . . . . . . . 382Drehsinn . . . . . . . . . . . . . . . . . . . . . . . . . . 23Dreibein, begleitendes . . . . . . . . . . . . 336Dreieck . . . . . . . . . . . . . . . . . . . . . . . . . . .491Drillung . . . . . . . . . . . . . . . . . . . . . 222, 226Druck . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
Druckkraft . . . . . . . . . . . . . . 55, 75f.Druckspannung . . . . . . . . . . . . . 162
Dynamik . . . . . . . . . . . . . . . . . . . . . . . . . .13
E
Ebenbleiben der Querschnitte . . . . 176,195, 263
ebene Biegung . . . . . . . . . . . . . . . 176, 263Ebene, schiefe . . . . . . . . . . . . . . . . . . . . 387ebener Spannungszustand . . . . . . . . 176ebener Stoß . . . . . . . . . . . . . . . . . . . . . . 383Eigenfrequenz . . . . . . . . . . . . . . . . . . . . 410Eigengewicht . . . . . . . . . . . . . . . . . . . . . 101Eigenkreisfrequenz . . . . . . . . 409f., 414f.Einfeldbalken. . . . . . . . . . . . . . . . . . . . .488Einflusszahlen . . . . . . . . . . . . . . . . . . . . 284Einheit . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Einheitensystem. . . . . . . . . . . . . .15Einheitsvektor . . . . . . . . . . . . . . . . . . . . 475Einschwingvorgang . . . . . . . . . . . . . . . 429Einzelkrafte . . . . . . . . . . . . . . . . . . . . . . . 17Einzelstab . . . . . . . . . . . . . . . . . . . . . . . . 167
ElastizitatElastizitatsgesetz. . . . . . . . . . . .147Elastizitatskonstante . . . . . . . . 155Elastizitatsmodul . . . . . . . . . . . 114
Elastostatik . . . . . . . . . . . . . . . . . . . . . . 111Ellipse . . . . . . . . . . . . . . . . . . . . . . . . . . . 491Energie
dissipative Energie . . . . . . . . . . 282Energiemethode . . . . . . . . . . . . . 281Energierhaltung . . . . . . . . . . . . . 386Energiesatz. . . . . . . . . . . . .348, 384Energieverlust. . . . . . . . . . . . . . .353Formanderungsenergie . . . . . . 282kinetische Energie . . . . . . 282, 349potentielle Energie . . . . . 282, 349
Englische Fachbegriffe . . . . . . . . . . . . 493Erdbeschleunigung . . . . . . . . . . . . . 34, 66Ersatzfedersteifigkeit. . . . . . . . .316, 406erzwungene Schwingung . . . . . 404, 427
F
Fachbegriffe . . . . . . . . . . . . . . . . . . . . . . 493Fachwerk. . . . . . . . . . . . . . . . . . . . . . . . . .55
Fachwerkknoten . . . . . . . . . . . . . . 55Fachwerkstab . . . . . . . . . . . . . . . . 55Knotenpunktverfahren . . . . . . . 56

510 Stichwortverzeichnis
Ritter-Schnitt-Verfahren. . . . . .60Faser, neutrale . . . . . . . . . . . . . . . . . . . 189Feder
Ersatzfedersteifigkeit . . . . . . . . 406Federkonstante . . . . . . . . . . . . . . 314Weganregung . . . . . . . . . . . . . . . 432
Feder-Masse-System . . . . . . . . . . . . . . 404Federschaltung . . . . . . . . . . . . . . . . . . . 405Finite Elemente Methode . . . . . . . . 297
FlacheFlacheninhalt . . . . . . . . . . . . . . . 455Flachenmaße . . . . . . . . . . . . . . . . 491zusammengesetzte . . . . . . . . . . . .69
Flachentragheitsmoment178, 197, 460,491
dunnwandiger Querschnitte . 472polares . . . . . . . . . . . . . . . . . . . . . . 460
Formanderungsarbeit . . . . . . . . . . . . 282
Formanderungsenergie . . 282, 285, 328durch Querkraftschub . . . . . . . 289durch Torsion . . . . . . . . . . . . . . . 290im Balken. . . . . . . . . . . . . . . . . . .287im Zugstab . . . . . . . . . . . . . . . . . 285
formtreu . . . . . . . . . . . . . . . . 222, 232, 235freie Schwingung . . . . . . . . . . . . . . . . . 404Freiheitsgrad . . . . . . . . . . . . . . . . . . 47, 48Freikorperbild . . . . . . . . . . . . . . . . . 39, 40Frequenz. . . . . . . . . . . . . . . . . . . . . . . . .405
Erregerfrequenz . . . . . . . . . . . . . 427Frequenzverhaltnis . . . . . 427, 430
Kreisfrequenz . . . . . . . . . . . . . . . 410Fußpunktanregung . . . . . . . . . . . . . . . 437
G
gedampfte Schwingung . . . . . . 404, 413Gelenk. . . . . . . . . . . . . . . . . . . . . . . .41, 487
Gelenkreaktionen . . . . . . . . . . . 39f.Momentengelenk . . . . . . . . . . . . 487Normalkraftgelenk . . . . . . . . . . 487Querkraftgelenk . . . . . . . . . . . . . 487
geometrisches Moment. . . . . . . . . . . .454geradlinige Bewegung. . . . . . . . . . . . .337geschlossener Querschnitt . . . . . . . . .225Geschwindigkeit . . . . . . . . . . . . . . . . . . 334Gestaltanderung
Gestaltanderungsenergie . . . . 328Gewicht
Eigengewicht . . . . . . . . . . . . . . . . 101Gewichtskraft . . . . . . . . . . . . . . . . 66
spezifisches . . . . . . . . . . . . . . . . . . . 66Gleichgewicht . . . . . . . . . . . . . .33, 35, 37
am ausgelenkten System . . . . 404am Stab . . . . . . . . . . . . . . . . . . . . 165Gleichgewichtsbedingungen . .35,
41, 47Gleichgewichtsbedingungen . . . . . . . 120Gleiten . . . . . . . . . . . . . . . . . . . . . . . . . . . 357Gleitung . . . . . . . . . . . . . . . . . . . . . . . . . 222
Gleitmodul. . . . . . . . . . . . . . . . . .149Gleitwinkel . . . . . . . . . . . . . . . . . . . . . . . 141Große, physikalische . . . . . . . . . . . . . . . 14Gravitation . . . . . . . . . . . . . . . . . . . . . . . . 66Grenzfall, aperiodischer. . . . . . . . . . .417Grundaufgaben. . . . . . . . . . . . . . . . . . .340
H
Haftbedingung . . . . . . . . . . . . . . . . . . . 356Haften . . . . . . . . . . . . . . . . . . . . . . . . . . . 355
Haftzahl . . . . . . . . . . . . . . . . . . . . 355Halbkreis . . . . . . . . . . . . . . . . . . . . . . . . . 491harmonische Anregung . . . . . . . . . . . 427harmonische Schwingung . . . . 405, 409Hauptachse . . . . . . . . . . . . . 176, 197, 202Hauptspannung . . . . . . . 127, 130f., 327Haupttragheitsmoment . . . . . . . . . . . 464Hebelarm. . . . . . . . . . . . . . . . . . . . . . . . . .22homogen . . . . . . . . . . . . . . . . . . . . . . . . . 148Hooke
Hookesches Gesetz114, 146, 147,152
Hookesches Gesetz fur Schub 149
I
I-Trager . . . . . . . . . . . . . . . . . . . . . . . . . . 189ideelle Biegesteifigkeit . . . . . . . 265, 269ideelle Dehnsteifigkeit. . . . . . . .265, 269ideeller Schwerpunkt . . . . . . . . . 264, 269Impuls . . . . . . . . . . . . . . . . . . . . . . 345, 377
Drehimpulssatz . . . . . . . . . . . . . 382Impulserhaltung . . . . . . . . . . . . 347Impulssatz . . . . . . . . . . . . . 347, 382
indifferent . . . . . . . . . . . . . . . . . . . . . . . . 311Integraltafel . . . . . . . . . . . . . . . . . . . . . . 490isotrop . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
K
Kessel

Stichwortverzeichnis 511
dunnwandig, zylindrisch . . . . . 133Kesselformel . . . . . . . . . . . . . . . . 134
Kette . . . . . . . . . . . . . . . . . . . . . . . . . . s. SeilKinematik . . . . . . . . . . . . . . . . . . . .13, 374
des Punktes . . . . . . . . . . . . . . . . . 334ebene Biegung . . . . . . . . . . . . . . 176
kinematisch unbestimmt . . . . . . . . . . . 48kinematische Beziehung . . . . . . . . . . 165Kinetik . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
des Massenpunktes . . . . . . . . . . 345Knicken . . . . . . . . . . . . . . . . . . . . . . . . . . 317Knoten
Fachwerkknoten . . . . . . . . . . . . . . 55Knotenpunktverfahren . . . . . . . 56
kombinierte Beanspruchung. . . . . . .248Kompression . . . . . . . . . . . . . . . . . . . . . 352Kompressionsphase . . . . . . . . . . . . . . . 351Kontinuum . . . . . . . . . . . . . . . . . . . . . . . . 13Koordinaten
Drehung des Koordinatensys-tems . . . . . . . . . . . . . . . . . . . 453
kartesische Koordinaten . . . . . 335Koordinatensysteme. . . . . . . . .335Koordinatentransformation. .453naturliche . . . . . . . . . . . . . . . . . . . 336Polarkoordinaten. . . . . . . . . . . .338
Koordinatentransformation . . . . . . . 123Kraftepaar . . . . . . . . . . . . . . . . . . . . . . . . 22
resultierendes Moment . . . . . . . 24Krafteparallelogramm . . . . . . . . . . . . . 19Kraftesystem
allgemeines. . . . . . . . . . . . . . .20, 37
ebenes . . . . . . . . . . . . . . . . . . . . . . . 27raumliches . . . . . . . . . . . . . . . . . . . 25zentrales . . . . . . . . . . . . . . . . . 19, 36
Zusammenfassung . . . . . . . . . . . . 25Krummung . . . . . . . . . . . . . . . . . . . . . . . 179Krummungsradius . . . . . . . . . . . . . . . . 337Kraft. . . . . . . . . . . . . . . . . . .13, 17, 22, 25
Angriffspunkt . . . . . . . . . . . . . . . . 17Betrag . . . . . . . . . . . . . . . . . . . . . . . 17innere . . . . . . . . . . . . . . . . . . . . . . . . 80konservative. . . . . . . . . . . . . . . . .386Kraftanregung . . . . . . . . . . . . . . 429Reaktionskraft . . . . . . . . . . . . . . . 34resultierende . . . . . . . . . . . . 19, 26f.Richtungssinn . . . . . . . . . . . . . . . . 17Wirkungslinie . . . . . . . . . . . . . . . . 17Zerlegung . . . . . . . . . . . . . . . . . . . . 20Zusammenfassung . . . . . . . . . . . . 19
Kraftstoß . . . . . . . . . . . . . . . . . . . . . . . . .347Kragarm . . . . . . . . . . . . . . . . . . . . . . . . . 489Kreis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 491
Kreisbewegung . . . . . . . . . . . . . . 339Kreisbogentrager . . . . . . . . . . . . . 94Kreisquerschnitt . . . . . . . . . . . . 221Kreisrohr . . . . . . . . . . . . . . . . . . . 224Kreiszylinder . . . . . . . . . . . . . . . .492
Kreisfrequenz . . . . . . . . . . . . . . . . 405, 410Kreuzprodukt . . . . . . . . . . . . . . . . . . . . 476Kriechbewegung. . . . . . . . . . . . . . . . .417f.kritische Dampfung. . . . . . . . . . . . . . .418Kugel . . . . . . . . . . . . . . . . . . . . . . . . . . . . 492
L
Langsspannung . . . . . . . . . . . . . . . . . . . 133labil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311Lager . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40
Festlager . . . . . . . . . . . . . . . . . . . . . 41Lagerreaktion . . . . . . . . . . . . . . . 39f.Loslager . . . . . . . . . . . . . . . . . . . . . .41
LastenFlachenlasten . . . . . . . . . . . . . . . . 72gleichgerichtete . . . . . . . . . . . . . . .73kritische . . . . . . . . . . . . . . . . . . . . 316Linienlasten . . . . . . . . . . . . . . . . . . 73nicht gleichgerichtete . . . . . . . . . 75Oberflachenlasten . . . . . . . . . . . . 72Streckenlasten. . . . . . . . . . . . . . . .73verteilte . . . . . . . . . . . . . . . . . . . . . . 65
Lehr’sches Dampfungsmaß. . . . . . . .415Leistung. . . . . . . . . . . . . . . . . . . . . . . . . .348lineares Stabelement. . . . . . . . . . . . . .297Linienfluchtigkeit . . . . . . . . . . . . . . . . . . 18logarithmisches Dekrement . . . . . . 416f.
M
Masse . . . . . . . . . . . . . . . . . . . . . . . . 14, 345Massenpunkt. . . . . . . . . . . . . . . .345Punktmasse . . . . . . . . . . . . . . . . . 487
Massentragheitsmoment . . . . . 379, 492Materialgleichung . . . . . . . . . . . 146, 166mathematisches Pendel . . . . . . 410, 429Matrix
Determinante . . . . . . . . . . . . . . . 125Invariante . . . . . . . . . . . . . . 125, 132Spur . . . . . . . . . . . . . . . . . . . 125, 132
Mechanik . . . . . . . . . . . . . . . . . . . . . . . . . . 13

512 Stichwortverzeichnis
Modell . . . . . . . . . . . . . . . . . . . . . . . . 14, 73Mohrscher
Spannungskreis . . . . . . . . . . . . . 126Tragheitskreis . . . . . . . . . . . . . . . 465
Moment . . . . . . . . . . . . . . . . . . . 22, 22, 25Biegemoment . . . . . . . 81, 178, 249Deviationsmoment . . . . . . . . . . 460Flachentragheitsmoment . . . . 460geometrisches . . . . . . . . . . . . . . . 454inneres . . . . . . . . . . . . . . . . . . . . . . . 80resultierendes . . . . . . . . . . . . . . . . 26statisches . . . . . . . . . . . . . . 218, 455Torsionsmoment . . . 92, 223, 235,
239Versetzungsmoment . . . . . 25, 239
Momentanpol . . . . . . . . . . . . . . . . . . . . 375momentenfreier Bogentrager . . . . . . . 96
Differentialgleichung. . . . . . . . . .98Momentengelenk . . . . . . . . . . . . . . . . . 487Momentensatz . . . . . . . . . . . . . . . . . . . . 377
N
Nachgiebigkeit. . . . . . . . . . . . . . . . . . . .114naturliche Koordinaten . . . . . . . . . . . 336neutrale Faser . . . . . . . . . . . . . . . 189, 202Newton
Newtonsche Bewegungsgleichun-gen . . . . . . . . . . . . . . . . . . . . 345
Newtonsches Grundgesetz . . . 345Normal
Normalbeschleunigung . . . . . . 337Normalkraft . . . . . . . . 81, 249, 263Normalkraftgelenk . . . . . . . . . . 487Normalspannung . . . . . . 119f., 131
Nullstab . . . . . . . . . . . . . . . . . . . . . . . . . . 56
O
Oberflachenkrafte. . . . . . . . . . . . .65, 72f.offener Querschnitt . . . . . . . . . . . . . . . 232Ortsvektor . . . . . . . . . . . . . . . . . . . . 22, 334
P
Parallelogrammaxiom. . . . . . . . . . . . . .19Parallelschaltung . . . . . . . . . . . . . . . . . 407Partikularlosung. . . . . . . . . . . . . . . . . .428Pendel
mathematisches . . . . . . . . . . . . . 410
Pendelstutze . . . . . . . . . . . . . . . . . 46Pendelstab . . . . . . . . . . . . . . . 42, 46
Periode . . . . . . . . . . . . . . . 404, 409f., 416periodische Schwingung. . . . . . . . . . .404Phasenwinkel . . . . . . . . . . . . . . . . 410, 429plastischer Stoß . . . . . . . . . . . . . . . . . . 383Poissonsche Konstante. . . . . . . . . . . .149polares Flachentragheitsmoment . . 460Polarkoordinaten . . . . . . . . . . . . . . . . . 338Potential . . . . . . . . . . . . . . . . . . . . . . . . . 350
potentielle Energie.282, 314, 349Prinzip. . . . . . . . . . . . . . . . . . . . . . . . . . . .14
von de Saint Venant. . . . . . . . .163Profil
Profilkoordinate . . . . . . . . . . . . . 217symmetrisches . . . . . . . . . . . . . . 466
Punktmasse . . . . . . . . . . . . . . . . . . . . . . 492
Q
Quader . . . . . . . . . . . . . . . . . . . . . . . . . . . 492Quadrat . . . . . . . . . . . . . . . . . . . . . . . . . . 491Querdehnzahl . . . . . . . . . . . . . . . . . . . . 149Querkontraktion . . . . . . . . . . . . . . . . . .148Querkraft . . . . . . . . . . . . . . . . . . . . . 81, 238
Querkraftgelenk . . . . . . . . . . . . . 487Schubspannung. . . . . . . . .214, 218Schubspannungen infolge Quer-
kraft. . . . . . . . . . . . . . . . . . .212Querschnitt
dunnwandiger . . . . . . . . . . 216, 225geschlossener . . . . . . . . . . . . . . . . 225Kreisquerschnitt . . . . . . . . . . . . 221offener . . . . . . . . . . . . . . . . . . . . . . 232Querschnittsufer . . . . . . . . . . . . . 82Rechteckquerschnitt . . . . . . . . . 232Rohrquerschnitt . . . . . . . . . . . . .224Verbundquerschnitt . . . . . . . . . 262zusammengesetzter . . . . . . . . . .235
R
RadialRadialbeschleunigung . . . . . . . 338Radialgeschwindigkeit . . . . . . . 338Radialspannung . . . . . . . . . . . . . 134
Rahmen . . . . . . . . . . . . . . . . . . . . . . . . . . . 91Randbedingung. . . . . . . . . . . . . . 179, 487Reaktionskraft. . . . . . . . . . . . . . . . . . . . .34Rechteck . . . . . . . . . . . . . . . . . . . . . . . . . 491

Stichwortverzeichnis 513
Rechteckquerschnitt . . . . . . . . . 232Rechtshandsystem . . . . . . . . . . . 475, 477Reduktionszahl . . . . . . . . . . . . . . . . . . . 268Referenzmaterial . . . . . . . . . . . . . . . . . 268Reibung. . . . . . . . . . . . . . . . . . . . .354, 423
Seilreibung . . . . . . . . . . . . . . . . . . 359Reihenschaltung . . . . . . . . . . . . . . . . . . 407Resonanz . . . . . . . . . . . . . . . . . . . . . . . . . 431Restitution . . . . . . . . . . . . . . . . . . . . . . . 352Restitutionsphase . . . . . . . . . . . . . . . . 351Resultierende . . . . . . . . . . . . .17, 65, 74f.Richtung
Hauptspannungsrichtung . . . 127,130f.
Richtungssinn . . . . . . . . . . . . . . . . 17Richtungsvektor . . . . . . . . . . . . . . 17
Ritter-Schnitt-Verfahren . . . . . . . . . . . 60Rohrquerschnitt . . . . . . . . . . . . . . . . . . 224Rotation . . . . . . . . . . . . . . . . . . . . . . . . . 374Ruhelage, statische . . . . . 404, 426, 426
S
Saint-Venantsche Torsion . . . . . . . . . 221Satz von Betti . . . . . . . . . . . . . . . . . . . . 284Satz von Maxwell . . . . . . . . . . . . . . . . 284Scheibe. . . . . . . . . . . . . . . . . . . . . . . . . . .122Scherung, reine . . . . . . . . . . . . . . . . . . . 211schiefe Biegung. . . . . . . . . . . . . .194, 250schiefe Ebene . . . . . . . . . . . . . . . . . . . . . 387Schnitt, schrager . . . . . . . . . . . . . . . . . 136Schnittgroßen . . . . . . . . . . . . . . . . 80, 387
kinetische . . . . . . . . . . . . . . . . . . . 387punkteweise Ermittlung . . . . . . 90
Schnittprinzip . . . . . . . . . .39, 40, 43, 80Schnittufer. . . . . . . . . . . . . . . . . . . . .82, 92Schornstein . . . . . . . . . . . . . . . . . . 387, 389Schub
reiner . . . . . . . . . . . . . . . . . . . . . . . 128Schubbeanspruchung . . . . . . . . 211Schubflachenfaktor . . . . . . . . . . 289Schubfluss . . . . . . . . . . . . 217f., 225Schubmittelpunkt . . . . . . . . . . . 238Schubmodul. . . . . . . . . . . . . . . . .149
Schubspannung. . . . . . . . . . . . .119f., 131infolge Querkraft . . . . . . . 214, 218infolge Torsion . . . 224, 233f., 236zugeordnete . . . . . . . . . . . . . . . . . 122
Schubspannunszustand . . . . . . . . . . . 149Schubverzerrungen . . . . . . . . . . . . . . . 142
schwache Dampfung . . . . . . . . . . . . . . 415Schwerachse . . . . . . . . . . . . . . . . . 178, 196Schwerkraft. . . . . . . . . . . . . . . . . . . . . . . .66Schwerpunkt . . . . . . . . . . . . . . . . 66ff., 238
Flachenschwerpunkt . . . . . 69, 457geometrischer . . . . . . . . . . . 68, 456ideeller . . . . . . . . . . . . . . . . . 264, 269Volumenschwerpunkt. . . . . . . .458von dunnwandigen Querschnit-
ten . . . . . . . . . . . . . . . . . . . . . 71Schwerpunktsatz . . . . . . . . . . . . . . . . . 377Schwingung . . . . . . . . . . . . . . . . . . . . . .402
erzwungene . . . . . . . . . . . . 404, 427freie . . . . . . . . . . . . . . . . . . . . . . . . 404freie ungedampfte . . . . . . . . . . . 407gedampfte . . . . . . . . . . . . . .404, 413harmonische. . . . . . . . . . . .405, 409periodische . . . . . . . . . . . . . . . . . . 404Schwingungsdauer. . . . . . . . . . .404
Seil . . . . . . . . . . . . . . . . . . . . . . . . . . . 35, 100Differentialgleichung . . . . . . . . 100Seilline . . . . . . . . . . . . . . . . . . . . . .100Seilreibung . . . . . . . . . . . . . . . . . . 359Seilrolle . . . . . . . . . . . . . . . . . . . . . . 35
Seillinie . . . . . . . . . . . . . . . . . . . . . . . . . . 102Seismische Anregung . . . . . . . . . . . . . 437Skalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Skalarprodukt . . . . . . . . . . . . . . .475Spannung . . . . . . . . . . . . . . . . . . . 112, 162
Axialspannung . . . . . . . . . . . . . . 134bei ebener Biegung . . . . . . . . . . 189bei schiefer Biegung . . . . . . . . . 201Definition . . . . . . . . . . . . . . . . . . . 118Langsspannung . . . . . . . . . . . . . 134Radialspannung . . . . . . . . . . . . . 134Spannungskreis . . . . . . . . . . . . . 126Spannungsmatrix 122f., 125, 131,
133, 135Spannungsnachweis . . . . . . . . . 163Spannungsnulllinie . . . . . 202, 250Spannungstensor . . . . . . . . . . . . 120Spannungsvektor . . . . . . . . . . . . 118Spannungsverteilung . . . . . . . . 162Umfangsspannung. . . . . . . . . . .134Verbundquerschnitt . . . . . . . . . 266Vergleichsspannung . . . . . . . . . 258
Spannungs-Dehnungs-Diagramm. .147Spannungskomponenten . . . . . . . . . . 119
Transformation . . . . . . . . . . . . . 123Vorzeichenkonvention . . . . . . . 120

514 Stichwortverzeichnis
Spannungszustand . . . . . . . . . . 118, 119
dreiachsiger . . . . . . . . . . . . . . . . . 152
ebener . . . . . . 122, 153, 176, 327ff.
einachsiger . . . . . . . . . . . . . . . . . . 135
hydrostatischer. . . . . . . . . . . . . .128
raumlicher . . . . . . . . . . . . . . . . . . 122
rotatationssymmetrischer. . . .133
zweiachsiger. . . . . . . . . . . . . . . . .122
Stutzlinie . . . . . . . . . . . . . . . . . . . . . . . . . . 96
Stab . . . . . . . . . . . . . . . . . . . 112, 161, 161
Beanspruchung. . . . . . . . . . . . . .161
Differentialgleichung. . . .114, 166
Gleichgewicht . . . . . . . . . . . . . . . 165
Stabsysteme . . . . . . . . . . . . . . . . 167
Verformungshypothese . . . . . . 161
stabil . . . . . . . . . . . . . . . . . . . . . . . . . . . . .311
Stabilitat . . . . . . . . . . . . . . . . . . . . . . . . . 311
starke Dampfung . . . . . . . . . . . . . . . . . 417
Starrkorper . . . . . . . . . . . . . . . . . . . 18, 374
Starrkorperbewegung. . . . . . . .374
Statik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
statische Bestimmtheit42, 47, 59
statische Ruhelage. . . . . .404, 426, 426
statisches Moment . . . . . . 214, 218, 455
grafische Veranschaulichung . 219
Stauchung . . . . . . . . . . . . . . . . . . . . . . . . 144
Steifigkeit
Biegesteifigkeit . . . . . . . . . . . . . . 178
Dehnsteifigkeit . . . . . . . . . . . . . . 114
Steifigkeitssprung . . . . . . . . . . . 487
Torsionssteifigkeit . . . . . . . . . . . 223
Steinersche Satze . . . . . . . . . . . . 462, 473
Stoß . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 351
ebener . . . . . . . . . . . . . . . . . . . . . . 383
elastischer. . . . . . . . . . . . . . . . . . .353
gerader zentrischer . . . . . . . . . . 351
plastischer . . . . . . . . . . . . . . . . . . 353
schiefer zentrischer . . . . . . . . . . 354
Stoßzahl . . . . . . . . . . . . . . . . . . . . 352
Stoffgleichung . . . . s. Materialgleichung
Streckenlast . . . . . . . . . . . . . . . . . . . . . . . 73
Streckung . . . . . . . . . . . . . . . . . . . . . . . . 144
Summenformel . . . . . . . . . . . . . . . . . . . . 68
Superposition . . . . . . . . . . . . . . . 192, 248
Symmetrie . . . . . . . . . . . . . . . . . . . . . . . 459
Symmetrieachse . . . . . . . . . . . . . . 68
symmetrisches Profil . . . . . . . . 466
T
Tangente . . . . . . . . . . . . . . . . . . . . . . . . . 334Teilschubkraft . . . . . . . . . . . . . . . . . . . . 239Temperatur . . . . . . . . . . . . . . . . . . . . . . . 14Temperaturanderung . . . . . . . . . . . . . 150Torsion . . . . . . . . . . . . . . . . . . . . . . . . . . 221
Differentialgleichung . . . . . . . . 223geschlossener Querschnitt . . . 225Kreisquerschnitt . . . . . . . . . . . . 221Kreisrohr . . . . . . . . . . . . . . . . . . . 224offener Querschnitt . . . . . . . . . .232Schubspannung . . 224, 233f., 236Torsionsmoment . . . 92, 223, 235,
239Torsionssteifigkeit . . . . . . . . . . . 223Torsionstragheitsmoment . . . 223,
229, 234f., 491Widerstandsmoment . . . 224, 226,
233f., 236zusammengesetzter Querschnitt
235Torsionsversuch . . . . . . . . . . . . . . . . . . 149Tragheitskreis . . . . . . . . . . . . . . . . . . . . 465Tragheitsmoment . . . . . . . . . . . . . . . . . 460
Haupttragheitsmoment . . . . . . 464Volumentragheitsmoment . . . 473
Tragheitstensor . . . . . . . . . . . . . . . . . . . 379Tresca-Vergleichsspannung. . . . . . . .328Trigonometrie . . . . . . . . . . . . . . . . . . . . 452
U
Ubergangsbedingung . . . . . . . . 179, 487Uberlagerung . . . . . . . . . . . . . . . 192, 248
Umfangsspannung . . . . . . . . . . . . . . . . 134Unwuchtanregung . . . . . . . . . . . . . . . . 435
V
Variation . . . . . . . . . . . . . . . . . . . . . . . . . 290Vektor . . . . . . . . . . . . . . . 15, 21, 335, 475
freier . . . . . . . . . . . . . . . . . . . . . . . . . 25Vektorprodukt . . . . . . . . . . . . . . 476
Verbundbedingung. . . . . . . . . . .263, 268Verbundquerschnitt . . . . . . . . . . . . . . 262
Verdrehung. . . . . . . . . . . . . . . . . . . . . . .179Verformung. . . . . . . . . . . . . . . . . . 179, 197Verformungshypothese, beim Stab 161Vergleichsspannung . . . . . . . . . 258, 326

Stichwortverzeichnis 515
Vergroßerungsfunktion . . . . . . . . . . 429f.Verhaltnis der Elastizitatsmoduln.268Verlangerung . . . . . . . . . . . . . . . . . . . . . 167Verruckung, virtuelle . . . . . . . . . . . . . 292Verschiebung . . . . . . . . . . . 113, 140, 179
Verschiebungsvektor . . . . . . . . 140Versetzungsmoment. . . . . . . . . . .25, 239Verwolbung. . . . . . . . . . . . . . . . . .221, 229Verzerrung . . . . . . . . . . . . . . . . . . . . . . . 140
Verzerrungsmatrix . . . . . . . . . . 142Verzerrungstensor . . . . . . . . . . . 140
Verzerrungszustand. . . . . . . . . . . . . . .140dreiachsiger . . . . . . . . . . . . . . . . . 152ebener . . . . . . . . . . . . . . . . . 143, 154einachsiger . . . . . . . . . . . . . . . . . . 144raumlicher . . . . . . . . . . . . . . . . . . 142
viskose Dampfung . . . . . . . . . . . 404, 413Vollquerschnitt . . . . . . . . . . . . . . . . . . . 212Volumen
Volumenanderungsenergie . . . 328Volumenkrafte . . . . . . . . . . . . 65, 73Volumenschwerpunkt. . . . . . . .458
Volumentragheitsmoment . . . . . . . . . 473von Mises-Vergleichsspannung . . . . 330Vorzeichenkonvention . . . . . . 55, 81, 92
W
Warmedehnung. . . . . . . . . . . . . .149, 166Warmeausdehnungskoeffizient
150Wolbkrafttorsion . . . . . . . . . . . . . . . . . 229Weg-Zeit-Diagramm . . . . . . . . . 404, 409Werkstoffkennwerte. . . . . . . . . . . . . . .157Widerstandsmoment. . . . . . . . . . . . . .190
Torsion . . . . . . . 224, 226, 233, 236Winkelgeschwindigkeit . . . . . . . . . . . .338Wirkungslinie . . . . . . . . 17f., 22, 25f., 76Wurf
schiefer Wurf . . . . . . . . . . . . . . . .346
Z
Zentrifugalbeschleunigung . . . . . . . 375f.Zentrifugalmoment . . . . . . . . . . . . . . . 460Zentripetalbeschleunigung . . . . . . . . 337Zirkularbeschleunigung . . . . . . 338, 376Zug
einachsiger . . . . . . . . . . . . . . . . . . 127Zugkraft . . . . . . . . . . . . . . . . . . . . . 55
Zugspannung. . . . . . . . . . . . . . . .162Zugversuch. . . . . . . . . . . . . . . . . .113
Zugversuch . . . . . . . . . . . . . . . . . . . . . . . 147zusammengesetzter Querschnitt. . .235Zustandslinie . . . . . . . . s. SchnittgroßenZwischenreaktionen . . . . . . . . . . . . . . . . 39Zylinderkoordinaten . . . . . . . . . . . . . . 335

Stand Juli 2006.Änderungen vorbehalten.Erhältlich im Buchhandel oder beim Verlag.
4., korr. und erg. Aufl. 2006. XIV, 721 S. Geb. € 49,90ISBN 3-8351-0006-8
7. Aufl. 2005. 404 S. (Leitfäden der angewandten Mathematikund Mechanik 3; hrsg. von Hotz, Günter /Kall, Peter / Magnus, Kurt / Meister,Erhard) Br. € 29,90ISBN 3-519-52301-9
Dankert, Jürgen / Dankert, HelgaTechnische MechanikStatik, Festigkeitslehre,Kinematik/Kinetik
Magnus, Kurt / Popp, KarlSchwingungenEine Einführung in physikalischeGrundlagen und die theoretischeBehandlung von Schwingungs-problemen
2005. 460 S. mit 148 Abb. u. 5 Tab.Br. € 36,90ISBN 3-519-00425-9
Silber, Gerhard / Steinwender, Florian Bauteilberechnung undOptimierung mit der FEM Materialtheorie, Anwendungen,Beispiele
B. G. Teubner VerlagAbraham-Lincoln-Straße 4665189 WiesbadenFax 0611.7878-400www.teubner.de
Teubner Lehrbücher: einfach clever



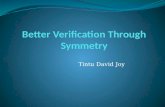
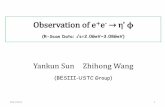


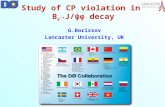





![Kapitel 5 | Trigonometrie · Kapitel 5 | Trigonometrie De nition 5.1 (Winkelfunktionen) Name D W Sinus sin R [ 1;1] Cosinus cos R [ 1;1] Tangens tan R nf2k+1 2 ˇjk2Z g R Cotangens](https://static.fdocument.org/doc/165x107/5e09aa41c36eb245c90b5343/kapitel-5-trigonometrie-kapitel-5-trigonometrie-de-nition-51-winkelfunktionen.jpg)




