sl wv 3pp 12 - University of Oxford Department of Physics ·...
20
The Wave Equation ♦ The method of characteristics ♦ Inclusion of boundary conditions ♦ Traveling waves and stationary waves
Transcript of sl wv 3pp 12 - University of Oxford Department of Physics ·...

The Wave Equation
♦ The method of characteristics
♦ Inclusion of boundary conditions
♦ Traveling waves and stationary waves

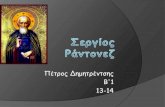
TRANSVERSE OSCILLATIONS OF AN ELASTIC STRING
small displacements y
θ2
θ
x
1
T2
T1
yuniform linear density ρ
• T1 cos θ1 = T2 cos θ2for small θ, cos θ ≃ 1 ⇒ T1 = T2 = T
• ρ δx∂2y
∂t2= T sin θ2 − T sin θ1
sin θ ≃ tan θ ≃∂y
∂x=⇒ ρ δx
∂2y
∂t2= T
[
(∂y
∂x)2 − (
∂y
∂x)1
]
︸ ︷︷ ︸
(∂2y/∂x2)δx+...
Thus ρ∂2y
∂t2= T
∂2y
∂x2
i.e. ,∂2y
∂x2=
1
c2∂2y
∂t2, c2 ≡
T
ρwave equation

2nd-order linear PDEs
A(x, y)uxx+2B(x, y)uxy+C(x, y)uyy+D(x, y)ux+E(x, y)uy+F (x, y)u = R(x, y)
• B2 − AC < 0 elliptic. Ex.: Laplace eqn. uxx + uyy = 0
• B2 −AC = 0 parabolic. Ex.: diffusion eqn. ut − αuxx = 0
• B2 −AC > 0 hyperbolic. Ex.: wave eqn. utt − c2uxx = 0
♦ General solutions of PDEs depend on arbitrary functions
(analogous to solutions of ODEs depending on arbitrary constants)
−→ boundary conditions to determine such functions
• Cauchy boundary conditions:
assign function u and normal derivative ∂u/∂n on given curve γ in xy plane
(relevant to hyperbolic PDEs)

D’Alembert’s solution
!2y
!x2=
1
c2
!2y
!t2
u = x ! ct
v = x + ct
Change variables
!
!x=
!u
!x
!
!u+!v
!x
!
!v=
!
!u+
!
!v
!
!t=
!u
!t
!
!u+!v
!t
!
!v= " c
!
!u+ c
!
!v
!2y
!x2=
1
c2
!2y
!t2
"
!!u
+!!v
"#$
%&'
2
y =1
c2
(c!!u
+ c!!v
"#$
%&'
2
y =!!u
(!!v
"#$
%&'
2
y
!"2y
"u"v= 0
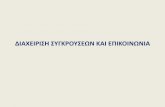
y u,v( ) = f u( ) + g v( ) i.e. y x,t( ) = f x ! ct( ) + g x + ct( )General solution
f, g arbitrary functions

• The curves in the xt plane
x− ct = const.
x+ ct = const.
are called the characteristics of the wave equation.
x−ct=const.
x
t
x+ct=const.

CHARACTERISTICS
Consider the PDE Aytt + 2Bytx + Cyxx +Dyt + Eyx + Fy = R
Q =
(
A B
B C
)
matrix of 2nd− order coefficients
• Characteristics of the above PDE are defined as the curves
χ(t, x) = const.
such that their normal n is rotated by 90◦ by Q or is annihilated by Q, i.e.,
n ·Q n = 0.
• Since n ∝ ∇χ, for characteristics ∇χ ·Q ∇χ = 0.
⊲ Example. Wave eqn. : −1
c2ytt + yxx = 0 ⇒ Q =
(
−1/c2 0
0 1
)
The curves χ∓(t, x) = x∓ ct =const. are the characteristics of the wave equation because
∇χ∓ =
(
∓c
1
)
⇒ ∇χ ·Q ∇χ = (∓c 1 )
(
−1/c2 0
0 1
)(
∓c
1
)
= (∓c 1 )
(
±1/c
1
)
= 0

• The condition ∇χ ·Q ∇χ = 0 implies, using ∇χ = (χt, χx), that
(χt χx )
(A B
B C
)(χt
χx
)
= 0 ,
i.e., Aχ2t + 2Bχtχx + Cχ2
x = 0 .
Expressing the derivatives in terms of x′(t) = −χt/χx,
A[x′(t)]2 − 2Bx′(t) + C = 0 .
♠ Hyperbolic eqns. (B2 −AC > 0) have 2 families of characteristics
♠ Parabolic eqns. (B2 −AC = 0) have 1 (Q ∇χ = 0)
♠ Elliptic eqns. (B2 −AC < 0) have none

Uses of characteristics
• Characteristics χ∓(t, x) = const. can be used to solve hyperbolic equations
by means of the transformation of variables
u = χ−(t, x)
v = χ+(t, x)
⊲ Example: D’Alembert solution of the wave equation
• Characteristics serve to analyze whether boundary value problems
for PDEs are well posed.
⊲ Example: Cauchy conditions on curve γ well-defined
provided γ is not a characteristic
[Cauchy-Kovalevska theorem]

Cauchy boundary conditions and characteristics
Consider the PDE Aytt + 2Bytx + Cyxx = H(yt, yx, y, t, x)
• Cauchy conditions: Suppose y and the normal derivative ynare assigned on the curve γ specified by
G(t, x) = 0
⊲ The normal and tangential directions to γ are n ∝ ∇G = (Gt, Gx), τ ∝ (−Gx, Gt).
⊲ Given y on γ, we can compute tangential derivative yτ . From yn and yτ we can get yt and yx.
• Can we determine higher derivatives as well?
∂
∂τyt = τ · ∇ yt ∝ (−Gx Gt )
(ytt
yxt
)
= −Gxytt +Gtyxt
∂
∂τyx = τ · ∇ yx ∝ (−Gx Gt )
(ytx
yxx
)
= −Gxytx +Gtyxx
⇒ 3 linear equations in ytt, ytx, yxx, with unique solution if det 6= 0

det
A 2B C
−Gx Gt 0
0 −Gx Gt
6= 0
⇒ AG2t + 2BGtGx + CG2
x 6= 0
That is, Cauchy conditions on curve γ are well-defined
provided γ is not a characteristic

! y x,t( ) = f x " ct( ) + g x + ct( )!
2y
!x2=1
c2
!2y
!t2
!"#$%&'%()"*+*,$-.,/+
f and g are determined by the initial conditions:
Suppose at time t = 0, the wave has an initial displacement U(x) and an initial velocity V (x)
y x,0( ) = f x( ) + g x( ) =U x( )
!y x,0( )!t
= "c #f x( ) + c #g x( ) =V x( ) $ f x( ) " g x( ) = "1
cV x '( )dx
b
x
% '
f x( ) =1
2U x( ) !
1
2cV x '( )dx
b
x
" '
g x( ) =1
2U x( ) +
1
2cV x '( )dx '
b
x
!
y x,t( ) =1
2U x ! ct( ) +U x + ct( )"#
$% +
1
2cV x( )dx ! V x( )dx
b
x!ct
&b
x+ct
&"
#
'''
$
%
(((
=1
2U x ! ct( ) +U x + ct( )"#
$% +
1
2cV x( )dx
x!ct
x+ct
&

!"#$%&'($)*+,$*-*.&/$0(1+&-23/&0$4*56/&1(7(-+$0(/(&5(4$8097$0(5+:$$
y x,t( ) =1
2U x ! ct( ) +U x + ct( )"#
$%
V (x) = 0
y x,t( ) =1
2U x ! ct( ) +U x + ct( )"# $% +
1
2cV x( )dx
x!ct
x+ct
&'
(
))
*
+
,,
U x( )



y x,t( ) = f x ! ct( ) + g x + ct( )
What is the form of f (x), g(x)?

If time dependence is cos ! t( ) the full x,t( ) dependence is given by
y x,t( ) = f x ! ct( ) + g x + ct( )
!"#$%&#%'('
Speed of wave c =
!
k•
• Frequency f =1
!=
"
2#
t
! =2"
#y(x,t)
x
! =2"
ky(x,t)• Wavelength ! =
2"
k
k is "wavenumber"
y(x,t)=Acos kx ! ! t( ) + Bcos kx "! t( )

We can write the equation of a travelling wave in a number of analogous forms:
Velocity Wavelength Period Angular
frequency
( )sinA kx t!" / k! 2 / k# 2 /# ! !
( )sinA k x vt" v 2 / k# 2 / vk# vk
sin 2x t
A #$ %
& '( )"* +, -. /0 1
/$ % $ % 2 /# %
( )sin 2 /A x vt# $"& '0 1 v $ / v$ 2 /v# $
N.B. Can include phase most easily by putting
( ) ( ), Re expy x t A i kx t!& '= "& '0 10 1
where A is complex.
N.B.2 Sometimes more convenient to switch x and t, i.e.
( ) ( ), siny x t A t kx!= "
This is still a travelling wave moving to the right.
For non-sinusoidal wave moving to right with speed v, can always write as ( )f x vt! .

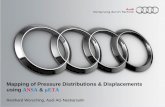
!"#$%&#'()*#+,-)
y = Asin kx !"t( ) + Asin kx +"t( )= 2Asin kxcos"t
y = Asin kx !"t + 2#1
( ) + Asin kx +"t + 2#2
( )= 2Asin kx + #
1+ #
2( )cos "t + #
1! #
2( )
.%',)/,&,'#00()
y t + !t( )
y t( )
1-"#$%&#'()*#+,2)

!"#$%&'()*+#,$-.)/#0-
!.E!"= 0
!.B!"= 0
! " E!"= #
$B!"
$t
! " B!"=1
c2
$E!"
$t
!"#$%&&'()%*+",-.()/01%%)(2"3%4)
!" #$B!"
$t= !
$" # B!"
$t= !
1
c2
$2E
!"
$t2
!2E
!"=1
c2
"2E
!"
"t2
EM plane wave E!"= E!"z( )
!2E
!"
!z2=1
c2
!2E!"
!t2
!E!"
!z= 0" E
z= 0
51".(6%1(%)$"6%)
! "! " E
!"= #!
2E
!"+! !.E
!"
( )
0
†
†

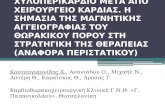
!"#$%&'$(")*
Ex = Asin kx !"t( )
Ey = Bsin kx !"t + #( )
Ex
Ey