SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTIcantor.polito.it/didattica/materiali/Analisi...
32
SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI Generalit` a sui sistemi 1. Sia (x(t),y(t)) la soluzione del problema di Cauchy ( x 0 =3x x(1) = 2 y 0 = -x 2 y(1) = 0. Posto v(t)=e x(t)y(t) , calcolare v 0 (1). 2. Sia ( x 0 =3x - y y 0 = x + y e ξ (t)= x(2t),η(t)= y(t). Scrivere il sistema soddisfatto da ξ e η. 3. Risolvere il sistema ( x 0 = y y 0 = -3x - 4y dopo essersi ricondotti ad una equazione del secondo ordine. 4. Data una soluzione γ (t)=(x(t),y(t)) del sistema ( x 0 =2x - 1 y 0 = x 2 - y t ∈ [0, 1], e il campo vettoriale ~ F(x, y)=(y - x 2 , 2x - 1), calcolare R γ ~ F · dP . 1
Transcript of SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTIcantor.polito.it/didattica/materiali/Analisi...
SISTEMI DI EQUAZIONIDIFFERENZIALI- ESERCIZISVOLTI
Generalita sui sistemi
1. Sia (x(t), y(t)) la soluzione del problema di Cauchy{
x′ = 3x x(1) = 2y′ = −x2 y(1) = 0.
Posto v(t) = e x(t)y(t), calcolare v′(1).
2. Sia {x′ = 3x− yy′ = x + y
e ξ(t) = x(2t), η(t) = y(t).
Scrivere il sistema soddisfatto da ξ e η.
3. Risolvere il sistema {x′ = yy′ = −3x− 4y
dopo essersi ricondotti ad una equazione del secondo ordine.
4. Data una soluzione γ(t) = (x(t), y(t)) del sistema{
x′ = 2x− 1y′ = x2 − y
t ∈ [0, 1],
e il campo vettoriale ~F(x, y) = (y − x2, 2x− 1), calcolare∫γ~F · dP .
1

2 SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI
5. Dire in quali punti (t0, y0) non puo applicarsi il teorema di Cauchy di esistenza e unicita di
soluzione per le seguenti equazioni scalari
a) y′ =√|t|, b) y′ =
√|y|, c) y′ = t|t|, d) y′ = y|y|, e) y′ = y
√|t|
con condizione iniziale y(t0) = y0.
6. Dire in quali punti (t0, x0, y0) non puo applicarsi il teorema di Cauchy di esistenza e unicita
per i seguenti sistemi
a)
{x′ =
√|t|xy′ = |y|y b)
{x′ =
√|y − t|y′ = x
con condizione iniziale (x(t0) = x0, y(t0) = y0).
SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI 3
Sistemi lineari a coefficienti costanti, omogenei
7. Risolvere il seguente sistema {x = 3x− 2yy = 2x− 2y
e determinare le soluzioni limitate su [0, +∞).
8. Risolvere il seguente sistema {x = 2x + yy = −x + 2y
e determinare le soluzioni limitate su (−∞, 0].
9. Risolvere il seguente sistema {x = 3x + yy = −x + y
e determinare le soluzioni limitate su (−∞, 0].
10. Risolvere il seguente sistema {x′1 = x1 + 2x2
x′2 = −2x1 − 4x2
11. Risolvere il seguente sistema {x′1 = x1 + 2x2
x′2 = −2x1 − x2
12. Risolvere il problema di Cauchy{
x = 3x− 2y, x(0) = 1y = 2x− 2y, y(0) = 2.

4 SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI
Sistemi lineari a coefficienti costanti, non omogenei
13. Risolvere il sistema {x′ = −x + 4y + e 3t
y′ = −x + 3y.
14. Risolvere il sistema {x′ = −x + 4y + 2 + e 3t
y′ = −x + 3y − 1.
15. Trovare la soluzione del problema di Cauchy{
x′ = −x + 4y + cos t, x(0) = 0y′ = −x + 3y, y(0) = 0.
16. Trovare la soluzione del problema di Cauchy{
x′ = x + 2y + e−t, x(0) = 0y′ = 2x + y, y(0) = 0.
17. Trovare la soluzione del problema di Cauchy{
x′ = x + 2y + e t, x(0) = 0y′ = 2x + y + 1, y(0) = 0.

SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI 5
Stabilita lineare
18. Studiare la stabilita della soluzione nulla del sistema{
x′ = −2x− 3yy′ = x + y.
19. Studiare, al variare di α ∈ R, la stabilita della soluzione nulla del sistema{
x′ = −3x + α2yy′ = x− 3y.
20. Studiare, al variare di α ∈ R, la stabilita della soluzione nulla del sistema{
x′ = 2yy′ = −2x + αy.
21. Studiare, al variare di α ∈ R, la stabilita della soluzione nulla del sistema{
x′ = αx− yy′ = x + y.
22. Dato il sistema {x′ = x + α2yy′ = 1
αx + αy,
determinare i valori di α ∈ R per cui:
a) tutte le soluzioni sono limitate su [0, +∞);
b) esistono soluzioni (diverse dalla soluzione nulla) limitate in [0, +∞).
23. Dato il sistema {x′ = x + α2yy′ = x + αy,
a) determinare i valori di α ∈ R per cui tutte le soluzioni sono limitate su [0, +∞);
b) dire se esistono soluzioni (diverse dalla soluzione nulla) limitate su R.

6 SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI
Stabilita non lineare
24. Trovare i punti critici dei seguenti sistemi, studiandone la stabilita e scriverne i corrispondenti
sistemi linearizzati;
a)
{x′ = yy′ = −x− y − (x2 + y2)
b)
{x′ = x2 + 2yy′ = x− y.
25. Verificare che (0, 0) e un punto critico del sistema:{
x′ = −x + e αy − 1y′ = e x−y − 1.
Discutere inoltre, al variare del parametro α 6= 1, la stabilita del punto (0, 0).

SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI 7
Esercizi di riepilogo sui sistemi
26. Dato il sistema {x = xy = −y − 2x.
a) Determinare l’integrale generale;
b) studiare la stabilita del punto critico (0, 0) e la limitatezza in passato (cioe in (−∞, 0])
e in futuro (cioe in [0,+∞)) delle soluzioni;
c) determinare gli α ∈ R tali che tutte le soluzioni (x(t), y(t)) verifichino
limt→0
e αt(
x(t)y(t)
)=
(00
);
d) determinare la soluzione che soddisfa x(0) = 2, y(0) = −2;
e) mostrare che il sistema e Hamiltoniano e tracciarne le orbite.
27. Dato il sistema {x = (α + 2)x + yy = −x + αy
a) discutere al variare di α ∈ R la stabilita della soluzione nulla e la limitatezza delle
soluzioni;
b) posto α = 1, risolvere il sistema.
28. Dato il sistema {x = 2e y − e x − 1y = sin αx + (αy)2
a) verificare che (0, 0) e un punto critico per ∀α ∈ R;
b) discutere, al variare di α ∈ R, α 6= 0, la stabilita del punto critico (0, 0).

8 SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI
Approfondimenti
29. Dato il sistema {x′ = αx− yy′ = x + αy
, α ∈ R,
risolverlo dopo averlo trasformato in coordinate polari e tracciarne qualitativamente le soluzioni.
30. Dato il sistema {x′ = (1 + y2) log(2 + cos(πx))y′ = x2 + y2
a) si determini la soluzione del problema di Cauchy con (x(0) = 1, y(0) = 1);
b) mostrare che se (x(t), y(t)) e una soluzione, definita per t su un intervallo I, allora
|x(t1)− x(t2)| < 2, ∀t1, t2 ∈ I.
31. Verificare che il seguente sistema e Hamiltoniano e studiare la stabilita del punto critico (0, 0){
x′ = yy′ = −x3.
32. Verificare che il seguente sistema e Hamiltoniano e studiare la stabilita del punto critico (0, 0){
x′ = 4y3
y′ = −2 sin x.

SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI 9
SOLUZIONI
Generalita sui sistemi
1. Derivando v(t) = e x(t)y(t) ed utilizzando le equazioni del sistema si trova
v′(t) = e x(t)y(t)[x′(t)y(t) + x(t)y′(t)]= e x(t)y(t)[3x(t)y(t)− x(t)3].
Sostituendo t = 1 si ottiene
v′(1) = e 2·0[3 · 2 · 0− 23] = −8.
2. Derivando rispetto a t la funzione ξ(t) = x(2t) ed utilizzando le equazioni del sistema abbiamo
ξ′(t) = 2x′(2t)= 2[3x(2t)− y(2t)]= 6ξ(t)− 2η(2t).
Analogamenteη′(t) = y′(t)
= x(t) + y(t)= ξ( t
2) + η(t),
da cui il sistema {ξ′(t) = 6ξ(t)− 2η(2t)η′(t) = ξ( t
2) + η(t).
Osserviamo che questo non e un sistema di equazioni differenziali ordinarie.
3. Derivando x′ = y otteniamo x′′ = y′ e sostituendo nella seconda equazione
x′′ = y′ = −3x− 4x′ ⇒ x′′ + 4x′ + 3x = 0.
Le radici del polinomio caratteristico
λ2 + 4λ + 3
sono λ1 = −1 , λ2 = −3, per cui l’integrale generale dell’equazione del secondo ordine e
x(t) = c1e−t + c2e−3t, c1, c2 ∈ R.
Derivando
y(t) = x′(t) = −c1e t − 3c2e−3t
per cui l’integrale generale del sistema e{
x(t) = c1e−t + c2e−3t
y(t) = −c1e−t − 3c2e−3t,c1, c2 ∈ R.

10 SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI
4. Osserviamo che γ(t) = (2x(t) − 1, x2(t) − y(t)) ed ~F(x(t), y(t)) = (y(t) − x2(t), 2x(t) − 1).
Quindi
γ(t) · ~F(x(t), y(t)) = 0,
ovvero γ(t) ⊥ ~F(γ(t)) e percio∫
γ
~F · dP =∫ 1
0
~F(x(t), y(t)) · γ(t)dt = 0.
5. Il teorema di esistenza ed unicita di Cauchy per y′ = f(t, y) richiede la continuita di f(x, y)
e della derivata parziale fy(x, y). Quindi nel nostro caso il teorema non si puo applicare:
a) in nessun punto;
b) nei punti (t0, 0), ∀t0 ∈ R;
c) nessun punto;
d) osserviamo che in questo caso ∂f∂y = |y| + y · sign y = 2|y| e continua quindi la risposta e:
nessun punto;
e) nessun punto.
6. Il teorema di esistenza e unicita per un sistema della forma (x′, y′) = (f1(t, x, y), f2(t, x, y))
richiede la continuita di fi e delle derivate parziali rispetto ad x ed y. Quindi:
a) f1 ed f2 sono continue ovunque. Inoltre ∂f1
∂x =√|t|, ∂f1
∂y = ∂f2
∂x = 0, ∂f2
∂y = 2|y| sono
anch’esse continue ovunque, per cui non c’e nessun punto in cui non siano verificate le ipotesi
del teorema di Cauchy.
b) Anche in questo caso f1 ed f2 sono continue ∀(x, y) ∈ R2, cosı come ∂f1
∂x = ∂f2
∂y = 0 e∂f2
∂x = 1. Invece ∂f1
∂y = sign (y−t)
2√|y−t| , non e continua se t0 = y0 e dunque il teorema non si applica
nei punti (t0, x0, t0), ∀t0, x0 ∈ R.

SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI 11
Sistemi lineari a coefficienti costanti, omogenei
7. La matrice dei coefficienti del sistema lineare e
A =(
3 −22 −2
)
che ha il polinomio caratteristico
det(
3− λ −22 −2− λ
)= (3− λ)(−2− λ) + 4
= λ2 − λ− 2= (λ− 2)(λ + 1).
Le radici sono λ = 2, λ = −1 dunque l’integrale generale e(
x(t)y(t)
)= c1e 2tu + c2e−tv,
dove u e v sono due autovettori relativi agli autovalori 2 e −1 rispettivamente.
λ = 2 Risolvo il sistema lineare omogeneo associato alla matrice A− 2I,
(1 −22 −4
) (xy
)=
(00
),
corrispondente all’unica equazione x − 2y = 0. Quindi un autovettore corrispondente all’
autovalore λ = 2 e
u =(
21
).
λ = −1 Risolvo il sistema lineare associato ad A + I,
(4 −22 −1
) (xy
)=
(00
),
corrispondente all’equazione 4x− 2y = 0 e trovo l’autovettore
v =(
12
).
L’integrale generale del sistema differenziale e dunque(
x(t)y(t)
)= c1e 2t
(21
)+ c2e−t
(12
),
o, piu esplicitamente{
x(t) = 2c1e 2t + c2e−t
y(t) = c1e 2t + 2c2e−t c1, c2 ∈ R.

12 SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI
Per quanto riguarda la limitatezza osserviamo che la funzione e 2t non e limitata su [0, +∞)
mentre la funzione e−t lo e. Quindi, affinche una soluzione sia limitata su tale intervallo,
non deve comparire la parte in e 2t, cioe deve essere c1 = 0. Quindi le soluzioni limitate su
[0,+∞) sono tutte e sole della forma{
x(t) = c2e−t
y(t) = 2c2e−t c2 ∈ R.
8. L’equazione caratteristica di
A =(
2 1−1 2
)
e
det(
2− λ 1−1 2− λ
)= (2− λ)2 + 1 = 0
da cui otteniamo (2 − λ)2 = −1 ⇒ 2 − λ = ±i e quindi gli autovalori sono λ = 2 ± i.
L’integrale generale sara della forma(
x(t)y(t)
)= c1e 2t [(cos t) · u− (sin t) · v] + c2e 2t [(sin t) · u + (cos t) · v] ,
dove u + iv e un autovettore relativo all’autovalore λ = 2 + i. Per trovare tale autovettore
devo risolvere il sistema omogeneo associato ad A− (2 + i)I, ovvero( −i 1−1 −i
) (xy
)=
(00
).
Questo corrisponde all’equazione
−ix + y = 0,
da cui, ponendo per esempio x = 1, ricavo l’autovettore(
1i
)=
(10
)+
(0i
)=
(10
)+ i
(01
),
e dunque
u =(
10
), v =
(01
).
Otteniamo l’integrale generale(
x(t)y(t)
)= c1e 2t
[cos t
(10
)− sin t
(01
)]+ c2e 2t
[sin t
(10
)+ cos t
(01
)]
ovvero {x(t) = e 2t(c1 cos t + c2 sin t)y(t) = e 2t(−c1 sin t + c2 cos t),
c1, c2 ∈ R.
Osserviamo che la funzione e 2t e limitata per t ∈ (−∞, 0] e le funzioni sin t e cos t sono
limitate su tutto R. Quindi tutte le soluzioni del sistema sono limitate su (−∞, 0].

SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI 13
9. Il polinomio caratteristico di
A =(
3 1−1 1
)
edet
(3− λ 1−1 1− λ
)= (3− λ)(1− λ) + 1
= λ2 − 4λ + 4= (λ− 2)2.
L’unico autovalore e λ = 2, contato con molteplicita algebrica due. Troviamo l’autospazio V2
relativo all’autovalore λ = 2, risolvendo il sistema (A− 2I)u = 0, ovvero(
1 1−1 −1
) (xy
)=
(00
),
corrispondente all’equazione x + y = 0. Quindi, ponendo per esempio x = 1, otteniamo
u =(
1−1
).
Dunque l’autospazio V2 ha dimensione 1 essendo generato dall’unico vettore u, ovvero l’autovalore
λ = 2 ha molteplicita geometrica 1. Quindi l’integrale generale sara della forma(
x(t)y(t)
)= c1e 2tu + c2e 2t [tu + v] ,
dove v e un autovettore generalizzato, ovvero una soluzione del sistema (A − 2I)v = u.
Questo corrisponde al sistema non omogeneo(
1 1−1 −1
) (xy
)=
(1−1
),
ovvero all’equazione x + y = 1. Scelgo per esempio x = 0, da cui y = 1, e quindi
v =(
01
).
Le soluzioni del sistema differenziale sono dunque(
x(t)y(t)
)= c1e 2t
(1−1
)+ c2e 2t
[t
(1−1
)+
(01
)], c1, c2 ∈ R,
ovvero {x(t) = c1e 2t + c2te 2t
y(t) = −c1e 2t − c2te 2t + c2e 2t,c1, c2 ∈ R.
Per quanto riguarda la limitatezza abbiamo che e 2t e limitata su (−∞, 0] mentre la funzione
t non e limitata, quindi le soluzioni limitate sono tutte e sole quelle corrispondenti a c2 = 0,
ovvero {x(t) = c1e 2t
y(t) = −c1e 2t,c1 ∈ R.

14 SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI
10. La matrice dei coefficienti e
A =(
1 2−2 −4
)
il polinomio caratteristico
det(A− λI) = (1− λ)(−4− λ) + 4= λ2 + 3λ= = λ(λ + 3)
e dunque gli autovalori sono λ1 = 0, λ2 = −3. L’integrale generale sara della forma(
x1(t)x2(t)
)= c1e 0tv + c2e−3tu, = c1v + c2e−3tu,
dove u e v sono due autovettori relativi agli autovalori 0 e −3 rispettivamente. Calcoliamo
gli autovettori.
α = 0 Risolvo il sistema omogeneo associato ad A− 0I = A, ovvero(
1 2−2 −4
) (x1
x2
)=
(00
),
corrispondente all’unica equazione x1 + 2x2 = 0. Quindi un autovettore corrispondente all’
autovalore λ = 0 e
u =(−2
1
).
α = −3 Risolvo il sistema omogeneo associato ad A + 3I, ovvero(
4 2−2 −1
) (x1
x2
)=
(00
),
corrispondente all’unica equazione −2x1 − x2 = 0. Quindi un autovettore corrispondente all’
autovalore λ = −3 e
v =(
1−2
).
Concludendo, l’integrale generale del sistema e(
x1(t)x2(t)
)= c1
(−21
)+ c2e−3t
(1−2
), c1, c2 ∈ R.
11.
A =(
1 2−2 −1
)⇒ det(A− λI) = (1− λ)(−1− λ) + 4 = λ2 + 3,
e gli autovalori sono λ1,2 = ±√3i. Quindi l’integrale generale sara della forma(
x1(t)x2(t)
)= c1
[cos
√3t · u− sin
√3t · v
]+ c2
[sin√
3t · u + cos√
3t · v],

SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI 15
dove u + iv e un autovettore relativo all’autovalore λ =√
3i. Risolviamo dunque il sistema
associato alla matrice A−√3iI, ovvero(
1−√3i 1−1 −1−√3i
) (x1
x2
)=
(00
),
corrispondente all’equazione (1−√3i)x1 + x2 = 0. Quindi otteniamo l’autovettore(
1−1 +
√3i
)=
(1−1
)+ i
(0√3
)⇒ u =
(1−1
), v =
(0√3
).
L’integrale generale del sistema e(
x1(t)x2(t)
)= c1
[cos
√3t ·
(1−1
)− sin
√3t ·
(0√3
)]+c2
[sin√
3t ·(
1−1
)+ cos
√3t ·
(0√3
)],
ovvero{
x1(t) = c1 cos√
3t + c2 sin√
3t
x2(t) = cos√
3t(−c1 +√
3c2) + sin√
3t(−c1
√3− c2),
c1, c2 ∈ R.
12. Il sistema e lo stesso dell’esercizio 7, il cui integrale generale e{
x(t) = 2c1e 2t + c2e−t
y(t) = c1e 2t + 2c2e−t.
Sostituendo la condizione iniziale x(0) = 1, y(0) = 2, otteniamo{
2c1 + c2 = 1c1 + 2c2 = 2
⇒{
c1 = 0c2 = 1.
Quindi la soluzione del problema di Cauchy e{
x(t) = e−t
y(t) = 2e−t.

16 SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI
Sistemi lineari a coefficienti costanti, non omogenei
13. Per prima cosa risolvo il sistema omogeneo associato{
x′(t) = −x + 4yy′(t) = −x + 3y.
Dal polinomio caratteristico
|A− λI| =∣∣∣∣∣−1− λ 4−1 3− λ
∣∣∣∣∣ = λ2 − 2λ + 1 = (λ− 1)2,
ottengo l’autovalore doppio λ = 1. Per trovare un autovettore u risolvo
(A− I)(
xy
)=
(−2 4−1 2
) (xy
)=
(00
),
da cui −x + 2y = 0 e quindi
u =(
21
).
Cerco ora un autovettore generalizzato v, risolvendo(−2 4−1 2
) (xy
)=
(21
),
da cui −x + 2y = 1. Scelgo y = 0 ed ottengo
v =(−1
0
).
L’integrale generale del sistema omogeneo e(
x(t)y(t)
)= e t
{c1
(21
)+ c2
[t
(21
)+
(−10
)]}, c1, c2 ∈ R,
ovvero {x(t) = e t(2c1 + 2c2t− c2)y(t) = e t(c1 + c2t),
c1, c2 ∈ R.
Cerchiamo ora una soluzione particolare del sistema non omogeneo. Dal momento che il
vettore dei termini noti e della forma
e 3t ·(
10
)
ovvero e 3t · p(t), con p(t) polinomio vettoriale di grado 0, e 3 non e radice del polinomio
caratteristico, posso cercare una soluzione particolare della stessa forma, cioe e 3t · q(t), con
q(t) polinomio vettoriale di grado 0, ovvero costante. Quindi cerco una soluzione del tipo{
x(t) = Ae 3t
y(t) = Be 3t,

SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI 17
con A,B ∈ R. Derivando e sostituendo nel sistema completo{
3Ae 3t = −Ae 3t + 4Be 3t + e 3t
3Be 3t = −Ae 3t + 3Be 3t,
da cui {3A = −A + 4B + 13B = −A + 3B
⇒{
A = 0B = −1
4 ,
corrispondente alla soluzione particolare{
x(t) = 0y(t) = −1
4e 3t.
L’integrale generale del sistema completo e la somma dell’integrale generale del sistema omo-
geneo associato e della soluzione particolare del sistema completo, e quindi si puo scrivere
come(
x(t)y(t)
)= e t
{c1
(21
)+ c2
[t
(21
)+
(−10
)]}+
(0
−14e 3t
), c1, c2 ∈ R
o, per esteso, {x(t) = 2c1e t + 2c2te t − c2e t
y(t) = c1e t + c2te t − 14e 3t,
c1, c2 ∈ R.
14. Il sistema omogeneo associato e lo stesso dell’esercizio precedente e dunque l’integrale generale
e {x(t) = e t(2c1 + 2c2t− c2)y(t) = e t(c1 + c2t),
c1, c2 ∈ R.
Cerchiamo ora una soluzione particolare del sistema completo. Il vettore dei termini noti si
puo scrivere come
e 3t ·(
10
)+
(2−1
).
Nell’esercizio precedente abbiamo trovato una soluzione particolare del sistema con termine
noto
e 3t ·(
10
)
e quindi per il principio di sovrapposizione e sufficiente sommarla ad una soluzione particolare
del sistema con temine noto (2−1
).
Questo e un vettore di costanti e quindi, dal momento che 0 non e radice del polinomio
caratteristico, posso cercare una soluzione particolare dello stesso tipo, ovvero{
x(t) = Ay(t) = B.

18 SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI
Sostituendo nel sistema completo otteniamo{
0 = −A + 4B + 20 = −A + 3B − 1
⇒{
A = −10B = −3
corrispondente alla soluzione particolare(−10−3
).
Applichiamo il principio di sovrapposizione e troviamo la soluzione particolare(
0−1
4e 3t
)+
(−10−3
)=
( −10−3− 1
4e 3t
)
del sistema completo di partenza. Concludendo, l’integrale generale del sistema completo
sara somma dell’integrale generale dell’omogeneo associato e della soluzione particolare del
sistema completo, quindi{
x(t) = e t(2c1 + 2c2t− c2)− 10y(t) = e t(c1 + c2t)− 3− 1
4e 3t,c1, c2 ∈ R.
15. Integrale generale del sistema omogeneo associato (lo stesso dell’esercizio precedente) e(
x(t)y(t)
)= e t
{c1
(21
)+ c2
[t
(21
)+
(−10
)]}.
Poiche non ha autovalori complessi, cerchiamo una soluzione del sistema completo nella forma{
x(t) = A cos t + B sin ty(t) = C cos t + D sin t.
Derivando e sostituendo nel sistema completo{−A sin t + B cos t = −(A cos t + B sin t) + 4(C cos t + D sin t) + cos t−C sin t + D cos t = −(A cos t + B sin t) + 3(C cos t + D sin t),
da cui
−A = −B + 4DB = −A + 4C + 1
−C = −B + 3DD = −A + 3C
⇒
A = −12
B = 32
C = 0D = 1
2 .
Integrale generale del sistema completo(
x(t)y(t)
)= e t
{c1
(21
)+ c2
[t
(21
)+
(−10
)]}+
(−1
2 cos t + 32 sin t
12 sin t
).

SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI 19
Imponiamo le condizioni iniziali x(0) = y(0) = 0,{
2c1 − c2 − 12 = 0
c1 = 0⇒
{c1 = 0c2 = −1
2
ed otteniamo la soluzione del problema di Cauchy{
x(t) = 12e t − te t − 1
2 cos t + 32 sin t
y(t) = −12 te t + 1
2 sin t.
16. Risolvo il sistema omogeneo associato. Dal polinomio caratteristico∣∣∣∣∣
1− λ 22 1− λ
∣∣∣∣∣ = (1− λ)2 − 4
= λ2 − 2λ− 3= (λ− 3)(λ + 1)
ottengo gli autovalori semplici λ = 3, λ = −1.
λ = −3 ⇒(−2 2
2 −2
) (xy
)=
(00
)⇒
{−2x + 2y = 0
. . .⇒ v1 =
(11
);
λ = −1 ⇒(
2 22 2
) (xy
)=
(00
)⇒
{2x + 2y = 0
. . .⇒ v2 =
(1−1
).
Integrale generale del sistema omogeneo(
x(t)y(t)
)= c1e 3t
(11
)+ c2e−t
(1−1
).
Poiche il termine noto e della forma e−t · p(t), con p(t) vettore polinomiale di grado 0,
ed il coefficiente di t nell’esponente e −1 (radice semplice del polinomio caratteristico), devo
cercare una soluzione del sistema completo nella forma e−t ·q(t), con q(t) vettore polinomiale
di grado 1, ovvero {x(t) = (At + B)e−t
y(t) = (Ct + D)e−t.
Derivendo e sostituendo{
Ae−t − (At + B)e−t = (At + B)e−t + 2(Ct + D)e−t + e−t
Ce−t − (Ct + D)e−t = 2(At + B)e−t + (Ct + D)e−t
−A = A + 2CA−B = B + 2D + 1−C = 2A + C
C −D = 2B + D
A = −C−C −B = B + 2D + 1
C = 2B + 2D
A = −C−C = 2B + 2D + 1
C = 2B + 2D
A = −C2C = −1
2B + 2D = −12
A = −CC = −1
22B + 2D = −1
2
A = 12
B = −14
C = −12
D = 0 (ad esempio).

20 SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI
Integrale generale del sistema completo(
x(t)y(t)
)= c1e 3t
(11
)+ c2e−t
(1−1
)+
(12 t− 1
4−1
2 t
)e−t
x(0) = y(0) = 0 ⇒{
c1 + c2 − 14 = 0
c1 − c2 = 0⇒
{c1 = 1
8c2 = 1
8 .
Soluzione del problema di Cauchy{
x(t) = −18e−t + 1
8e 3t + 12 te−t
x(t) = −18e−t + 1
8e 3t − 12 te−t
17. Integrale generale del sistema omogeneo (lo stesso dell’esercizio precedente)(
x(t)y(t)
)= c1e 3t
(11
)+ c2e−t
(1−1
).
Cerco una soluzione del sistema completo come{
x(t) = A + Be t
y(t) = C + De t :
{Be t = (A + Be t) + 2(C + De t) + e t
De t = 2(A + Be t) + (C + De t) + 1.
B = B + 2D + 10 = A + 2C
D = 2B + D0 = 2A + C + 1
⇒
D = −12
B = 0A = −2CC = 1
3
⇒
A = −23
B = 0C = 1
3D = −1
2 .
Integrale generale del sistema completo(
x(t)y(t)
)= c1e 3t
(11
)+ c2e−t
(1−1
)+
(−2
3−1
3 − 12e t
)
x(0) = y(0) = 0 ⇒{
c1 + c2 − 23 = 0
c1 − c2 + 13 − 1
2 = 0⇒
{c1 + c2 = 2
3c1 − c2 = 1
6
⇒{
c1 = 512
c2 = 14 .
Soluzione del problema di Cauchy
x(t) = 512e 3t + 1
4e−t − 23
y(t) = 512e 3t − 1
4e−t − 12e t + 1
3 .

SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI 21
Stabilita lineare
18. Il polinomio caratteristico di A e
det(−2− λ 3
1 1− λ
)= λ2 + λ + 1,
e quindi gli autovalori
λ1,2 =−1±√−3
2= −1
2±√
32
i.
Si ha Re (λ1) = Re (λ2) = −12 < 0 e quindi (0, 0) e asintoticamente stabile (e un fuoco).
19. Si ha
det(−3− λ α2
1 −3− λ
)= (−3− λ)2 − α2 = 0
per −3− λ = ±|α|, quindi λ1 = −3− |α|, λ2 = −3 + |α|. Osserviamo che λ1 < 0 ∀α, λ2 < 0
per |α| < 3. Percio:
se |α| < 3 ⇒ (0, 0) asintoticamente stabilese |α| = 3 ⇒ (0, 0) stabile (perche λ1 = −6, λ2 = 0 semplice)se |α| > 3 ⇒ (0, 0) instabile
20.
det(A− λI) = det(−λ 2−2 α− λ
)= λ2 − αλ + 4.
Per ∆ = α2 − 16 < 0, ossia |α| < 4, gli autovalori sono complessi coniugati e
Re (λ1) = Re (λ2) =α
2
> 0 per 0 < α < 4= 0 per α = 0< 0 per − 4 < α < 0.
Per ∆ = α2 − 16 = 0, ossia α = ±4,{
λ1 = λ2 = 2 se α = 4λ1 = λ2 = −2 se α = −4.
Per ∆ = α2 − 16 > 0, ossia |α| > 4, le radici λ1 e λ2 sono reali (distinte). Inoltre, λ1 · λ2 =
detA = 4 > 0, per cui le radici sono di segno concorde. Siccome λ1 + λ2 = trA = α, sara
λ1 > 0, λ2 > 0 per α > 4 e λ1 < 0, λ2 < 0 per α < −4.
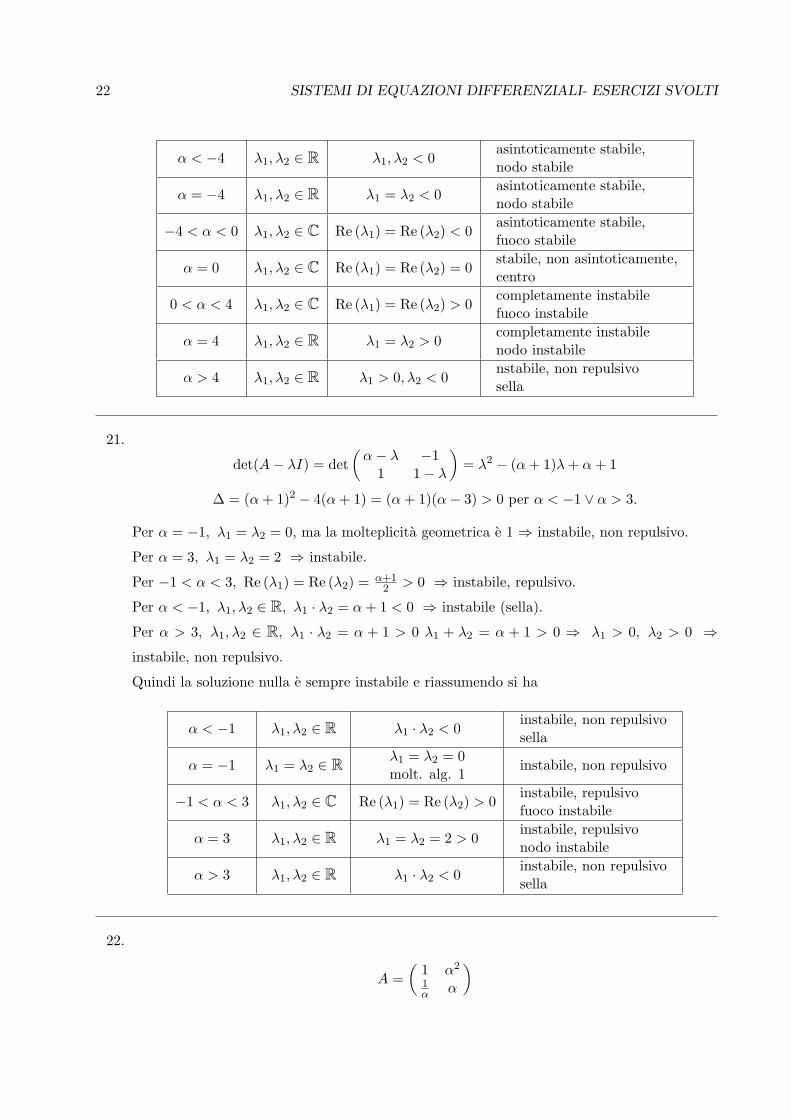
Riassumendo
22 SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI
α < −4 λ1, λ2 ∈ R λ1, λ2 < 0asintoticamente stabile,nodo stabile
α = −4 λ1, λ2 ∈ R λ1 = λ2 < 0asintoticamente stabile,nodo stabile
−4 < α < 0 λ1, λ2 ∈ C Re (λ1) = Re (λ2) < 0asintoticamente stabile,fuoco stabile
α = 0 λ1, λ2 ∈ C Re (λ1) = Re (λ2) = 0stabile, non asintoticamente,centro
0 < α < 4 λ1, λ2 ∈ C Re (λ1) = Re (λ2) > 0completamente instabilefuoco instabile
α = 4 λ1, λ2 ∈ R λ1 = λ2 > 0completamente instabilenodo instabile
α > 4 λ1, λ2 ∈ R λ1 > 0, λ2 < 0nstabile, non repulsivosella
21.
det(A− λI) = det(
α− λ −11 1− λ
)= λ2 − (α + 1)λ + α + 1
∆ = (α + 1)2 − 4(α + 1) = (α + 1)(α− 3) > 0 per α < −1 ∨ α > 3.
Per α = −1, λ1 = λ2 = 0, ma la molteplicita geometrica e 1 ⇒ instabile, non repulsivo.
Per α = 3, λ1 = λ2 = 2 ⇒ instabile.
Per −1 < α < 3, Re (λ1) = Re (λ2) = α+12 > 0 ⇒ instabile, repulsivo.
Per α < −1, λ1, λ2 ∈ R, λ1 · λ2 = α + 1 < 0 ⇒ instabile (sella).
Per α > 3, λ1, λ2 ∈ R, λ1 · λ2 = α + 1 > 0 λ1 + λ2 = α + 1 > 0 ⇒ λ1 > 0, λ2 > 0 ⇒instabile, non repulsivo.
Quindi la soluzione nulla e sempre instabile e riassumendo si ha
α < −1 λ1, λ2 ∈ R λ1 · λ2 < 0instabile, non repulsivosella
α = −1 λ1 = λ2 ∈ R λ1 = λ2 = 0molt. alg. 1
instabile, non repulsivo
−1 < α < 3 λ1, λ2 ∈ C Re (λ1) = Re (λ2) > 0instabile, repulsivofuoco instabile
α = 3 λ1, λ2 ∈ R λ1 = λ2 = 2 > 0instabile, repulsivonodo instabile
α > 3 λ1, λ2 ∈ R λ1 · λ2 < 0instabile, non repulsivosella
22.
A =(
1 α2
1α α
)

SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI 23
ed il polinomio caratteristico
det(A− λI) = λ2 − (1 + α)λ + (α− α) = λ2 − (1 + α)λ,
le cui radici sono λ1 = 0, λ2 = 1 + α.
1) Se λ2 = 1 + α 6= 0, detti v1 e v2 gli autovettori associati a λ1 e λ2, le soluzioni sono
c1e λ1tv1 + c2e λ2tv2 = c1v1 + c2e λ2tv2, c1, c2 ∈ R.
Dunque tutte le soluzioni sono limitate in [0, +∞) se λ2 = 1 + α < 0, cioe se α < −1.
2) Se α = −1, λ = 0 e autovalore doppio. Poiche la matrice
A− λI =(
1 11 −1
)
ha rango 1, λ = 0 ha molteplicita geometrica 1 e le soluzioni sono del tipo
c1v1 + c2(w1 + tv1), c1, c2 ∈ R,
con w1 autovettore generalizzato. Sono limitate in [0, +∞) solo le soluzioni con c2 = 0
Concludendo:
a) tutte le soluzioni sono limitate su [0, +∞) se α < −1;
b) esiste almeno una soluzione non banale limitata su [0, +∞) se α ≤ −1.
23. Il polinomio caratteristico
det(A− λI) = λ2 − (α + 1)λ + α− α2
ha discriminante
∆ = 5α2 − 2α + 1 < 0, ∀α ∈ R,
quindi gli autovalori sono sempre complessi coniugati
λ1,2 =1 + α±√5α2 − 2α + 1
2.
Le soluzioni sono limitate su [0,+∞) se la parte reale degli autovalori e non positiva, dunque
se
Re (λ1) = Re (λ2) =1 + α
2≤ 0 ⇔ α ≤ −1.
Infatti in questo caso, detto v1 + iv2 un autovettore associato a λ1, le soluzioni sono
c1e Re(λ1)t(v1 cos t− v2 sin t) + c2e Re(λ1)t(v1 sin t + v2 cos t), c1, c2 ∈ R.
Quando Re (λ1) = 0, le soluzioni sono limitate ∀t ∈ R. Concludendo:
24 SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI
α ≤ −1 tutte le soluzioni sono limitate per t ∈ [0, +∞)α = −1 tutte le soluzioni sono limitate per t ∈ R

SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI 25
Stabilita non lineare
24. a) I punti critici del sistema{
x′ = f1(x, y) = yy′ = f2(x, y) = −x− y − (x2 + y2)
sono i punti in cui si annulla il sistema{
y = 0−x− y − (x2 + y2) = 0
⇒{
y = 0−x(1 + x) = 0
⇒{
P1(0, 0)P2(−1, 0).
Per studiare la stabilita del sistema, si puo usare il teorema di stabilita in prima approssi-
mazione, studiando la stabilita del sistema linearizzato associato. Calcoliamo quindi la ma-
trice jacobiana di F (x, y) = (f1(x, y), f2(x, y)):
JF (x, y) =(
0 1−1− 2x −1− 2y
).
In particolare
P1(0, 0)
JF (0, 0) =(
0 1−1 −1
).
e il sistema linearizzato e {x = yy = −x− y.
Il polinomio caratteristico e λ2 +λ+1, le cui radici sono λ1,2 = −12 ±
√−32 i. Poiche Re (λ1) =
Re (λ2) = −12 < 0, P1(0, 0) risulta essere asintoticamente stabile.
P2(−1, 0)
JF (−1, 0) =(
0 11 −1
).
Ponendo X = x− (−1), Y = y, otteniamo il sistema lineare omogeneo{
X = Y
Y = X − Y
la cui equazione caratteristica e λ2 + λ− 1 = 0. In questo caso gli autovalori sono
λ1,2 =−1±√5
2.
Poiche λ1 < 0 e λ1 > 0, P2 e instabile, ma non repulsivo (e una sella).
b) Risolvo il sistema{
x2 + 2y = 0x− y = 0
⇒{
x(x + 2) = 0x = y

26 SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI
e trovo P0(0, 0), P1(−2,−2). La matrice Jacobiana di F (x, y) = (x2 + 2y, x− y) e
JF (x, y) =(
2x 21 −1
).
Linearizzato in P0
JF (P0) =(
0 21 −1
),
per cui otteniamo il sistema lineare omogeneo{
x = 2yy = x− y
il cui polinomio caratteristico λ2 + λ− 2 ha le radici λ1,2 = −1±√1+82 = −1±3
2 ,
⇒ λ1 = −2, λ2 = 1 ⇒ P0 e una sella (instabile).
Linearizzato in P1
JF (P1) =(−4 2
1 −1
)
Ponendo X = x + 2, Y = y + 2 si ottiene{
X = −4X + 2Y
Y = X − Y
λ2 + 5λ + 2 = 0 ⇒ λ1,2 = −5±√25−82 = −5±√17
2 .
λ1 < 0, λ2 < 0 ⇒ P1 e un punto critico asintoticamente stabile (nodo).
25. Posto F (x, y) = (−x + e αy − 1, e x−y − 1),
JF (x, y) =( −1 αe αy
e x−y −e x−y
)⇒ JF (0, 0) =
(−1 α1 −1
).
Il sistema linearizzato risulta essere {x′ = −x + αyy′ = x− y,
con equazione caratteristica
(1− λ)2 − α = 0
e dunque λ1,2 = −1±√α.
• Se α < 0, λ1, λ2 ∈ C e Re (λ1) = Re (λ2) = −1 < 0;
• se 0 ≤ α < 1, λ1 ≤ λ2 < 0;
• se α > 1, λ2 > 0;
• se α = 1, c’e un autovalore nullo e il teorema di stabilita in prima approssimazione non
fornisce informazioni.
Percio se α < 1, (0, 0) e asintoticamente stabile, mentre se α > 1, (0, 0) e instabile (sella).

SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI 27
Esercizi di riepilogo sui sistemi
26. a) La matrice
A =(
1 0−2 −1
)
e triangolare, per cui gli autovalori sono gli elementi sulla diagonale principale, ovvero λ = ±1.
Se λ = 1, per trovare un autovettore risolviamo il sistema associato ad
A− I =(
0 0−2 −2
),
che corrisponde all’unica equazione −2x− 2y = 0. Dunque un generatore dell’autospazio V1
e
v1 =(
1−1
).
Se λ = −1, abbiamo il sistema associato ad
A + I =(
2 0−2 0
),
corrispondente a 2x = 0. Dunque un generatore per l’autospazio V−1 e
v2 =(
01
).
Quindi l’integrale generale del sistema e(
x(t)y(t)
)= c1e t
(1−1
)+ c2e−t
(01
), c1, c2 ∈ R.
b) Uno dei due autovalori e positivo e dunque (0, 0) e instabile (sella).
Le soluzioni limitate in futuro sono tutte quelle corrispondenti a c1 = 0 e c2 arbitrario
Le soluzioni limitate in passato sono tutte quelle corrispondenti a c2 = 0 e c1 arbitrario.
L’unica soluzione limitata e la soluzione costante x(t) = 0, y(t) = 0 ∀t.
c) La richiesta e che
e αt(
x(t)y(t)
)=
[c1e (α+1)t
(1−1
)+ c1e (α−1)t
(01
)]→
(00
), per t → +∞,
per ogni c1, c2. Quindi si devono verificare le disuguaglianze{
α− 1 < 0α + 1 < 0,
ovvero deve essere α < −1.

28 SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI
d) x(0) = 2, y(0) = −2(
x(0)y(0)
)= c1
(1−1
)+ c2
(01
)=
(2−2
)
corrispondente al sistema{
c1 = 2−c1 + c2 = −2
⇒{
c1 = 2c2 = 0.
Quindi la soluzione cercata e (x(t)y(t)
)= 2e t
(1−1
).
e)
x =∂H
∂y
y = −∂H
∂x
⇒
∂H
∂y= x
−∂H
∂x= −y − 2x
⇒{
H(x, y) = xy + ϕ(x)−y − ϕ′(x) = −y − 2x
da cui H(x, y) = xy + x2. Le orbite sono quindi le curve di livello xy + x2 = c, ovvero
y = −x +c
x.
27. a) Dal polinomio caratteristico
det(
α + 2− λ 1−1 α− λ
)= (α + 2− λ)(α− λ) + 1
= λ2 − 2(α + 1)λ + (α + 1)2
= (λ− α− 1)2
= [λ− (α + 1)]2
deduciamo che esiste l’unico autovalore λ = α + 1, contato con molteplicita 2. Si presentano
quindi i seguenti casi.
• Se α < −1 la soluzione nulla e asintoticamente stabile (nodo), tutte le soluzioni sono
limitate in futuro e nessuna (tranne quella banale) e limitata in passato.
• Se α > −1 la soluzione nulla e completamente instabile (nodo instabile), tutte le soluzioni
sono limitate in passato e, tranne quella banale, nessuna e limitata in futuro.
• Se α = −1 ho λ = 0 doppio e
kerA = ker(
1 1−1 1
)
ha dimensione 1. Dunque λ = 0 ha molteplicita geometrica 1 e la soluzione nulla e
instabile. Inoltre le soluzioni sono del tipo c1v1 + c2(v2 + tv1), dove v1 e autovettore e
v2 autovettore generalizzato. Tutti i punti della retta passante per l’origine e parallela
a v1 sono punti critici, ciascuno dei quali rappresenta una soluzione limitata su R.

SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI 29
b) Se α = 1 abbiamo l’autovalore doppio λ = 2. Calcoliamo l’autospazio V2 risolvendo il
sistema associato ad A− 2I (1 1−1 −1
) (xy
)=
(00
),
corrispondente all’equazione x + y = 0. Dunque possiamo prendere come generatore di V2 il
vettore
v1 =(
1−1
).
Cerchiamo ora un autovettore generalizzato v2, risolvendo il sistema(
1 1−1 −1
) (xy
)=
(−11
),
corrispondente a x + y = 1. Scegliamo x = 0 ed otteniamo
v2 =(
01
).
L’integrale generale del sistema differenziale si puo scrivere come(
x(t)y(t)
)= c1e 2t
(1−1
)+ c2e 2t
[t
(1−1
)+
(01
)], c1, c2 ∈ R.
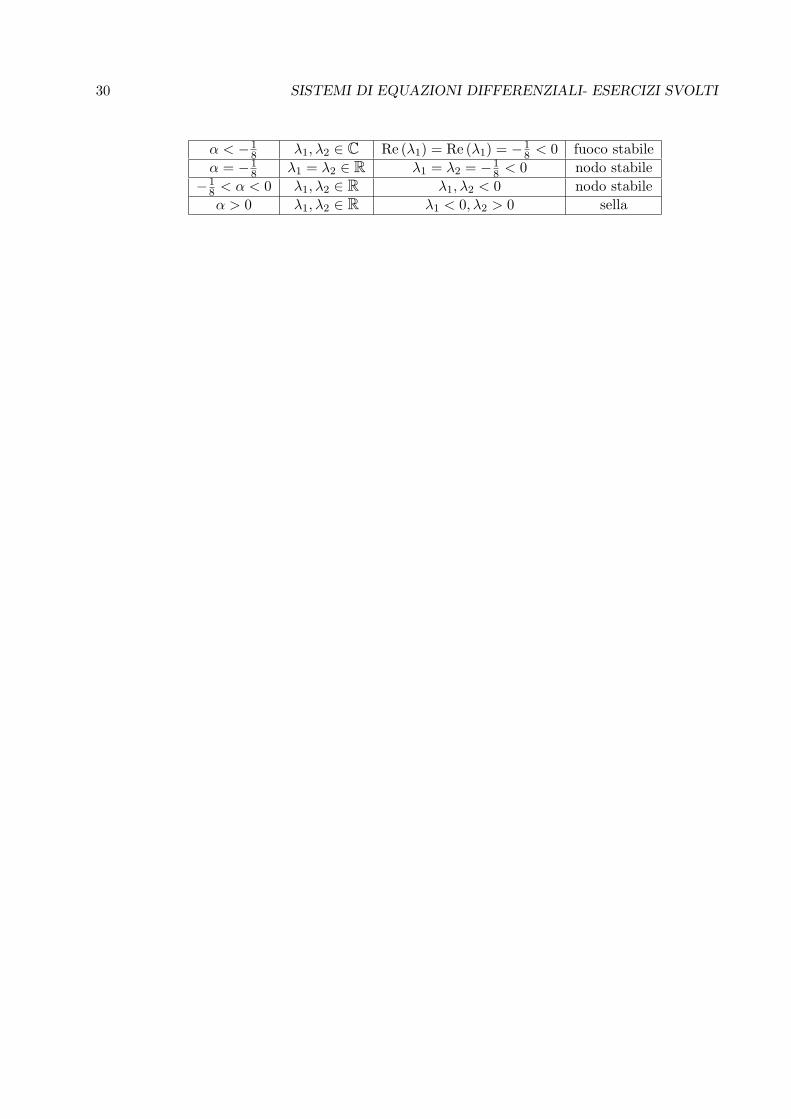
28. Posto F (x, y) = (2e y−e x−1, sinαx+(αy)2), abbiamo che F (0, 0) = (0, 0), ∀α ∈ R, e dunque
(0, 0) e un punto critico per ∀α ∈ R. Inoltre
JF (x, y) =( −e x 2e y
α cosαx 2α2y
)⇒ JF (0, 0) =
(−1 2α 0
).
Osserviamo che detJF (0, 0) 6= 0, percio, per il teorema di inversione locale, non esistono
punti P0 6= (0, 0) in un intorno di (0, 0) tali che f(P0) = 0. Il polinomio caratteristico della
matrica Jacobiana
(−1− λ)(−λ)− 2α = λ2 + λ− 2α
ha discriminante ∆ = 1 + 8α.
• Se 1 + 8α ≤ 0, ossia α ≤ −18 , Re (λ1) = Re (λ2) = −1
2 < 0.
• Se 1 + 8α > 0, ossia α > −18 distinguiamo due casi:
se α > 0, λ1 < 0, λ2 > 0;
se −18 < α < 0, λ1 < 0, λ2 < 0.
Percio per α < 0 (0, 0) e asintoticamente stabile mentre per α > 0 (0, 0) e instabile e per
α = 0 il teorema di stabilita in prima approssimazione non fornisce risposte. Riassumendo:
30 SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI
α < −18 λ1, λ2 ∈ C Re (λ1) = Re (λ1) = −1
8 < 0 fuoco stabileα = −1
8 λ1 = λ2 ∈ R λ1 = λ2 = −18 < 0 nodo stabile
−18 < α < 0 λ1, λ2 ∈ R λ1, λ2 < 0 nodo stabileα > 0 λ1, λ2 ∈ R λ1 < 0, λ2 > 0 sella

SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI 31
Approfondimenti
29. Derivando le relazioni
x = r cos θ, y = r sin θ
e sostituendo nel sistema otteniamo{
x′ = r′ cos θ − r sin θθ′ = αr cos θ − r sin θy′ = r′ sin θ + r cos θθ′ = r cos θ + αr sin θ.
Moltiplicando la prima riga per cos θ, la seconda per sin θ e sommando, si ottiene r′ = αr.
Viceversa, moltiplicando la prima per − sin θ, la seconda per cos θ e sommando si ottiene
θ′ = 1. Quindi il sistema equivale a{
r′ = αrrθ′ = r
⇒{
r′ = αrθ′ = 1
⇒{
r(t) = c1e αt
θ(t) = t + c2.
30. a) La soluzione costante x(t) ≡ 1 ∀t soddisfa la prima equazione. Sostituendo nella seconda
y′ = 1 + y2 ⇒ dy
1 + y2= dt.
Integrando
arctan y = t + c ⇒ y = tan(t + c)
ed imponendo y(0) = 1 si ottiene 1 = tan(c) ⇒ c = π4 e quindi la soluzione
{x(t) = 1y(t) = tan(t + π
4 ),
con t ∈ (−3π4 , π
4 ), che e l’intervallo massimale.
b) Siccome {x(t) = 2k + 1, k ∈ Zy(t) = tan(t + h), h ∈ R
sono soluzioni ed hanno per orbite le rette verticali x = 2k + 1, sappiamo per il teorema di
Cauchy che ogni altra orbita non puo intersecare tali rette. Dunque ogni orbita e confinata
in una striscia verticale 2k − 1 < x < 2k + 1, di larghezza 2.
31. {∂H∂y = y
−∂H∂x = −x3 ⇒ H(x, y) =
12y2 + ϕ(x).

32 SISTEMI DI EQUAZIONI DIFFERENZIALI- ESERCIZI SVOLTI
Derivando rispetto ad x otteniamo −ϕ′(x) = −x3 e quindi ϕ(x) = 14x4 + c. Sostituendo,
H(x, y) =12y2 +
14x4.
Verifichiamo che (0, 0) e stabile, ossia che ∀ε > 0, ∃δ > 0 tale che per ogni soluzione (x(t), y(t))
che verifica x(0)2 + y(0)2 < δ2, si ha x(t)2 + y(t)2 < ε2, ∀t ∈ [0,+∞).
Risulta12y(t)2 +
14x(t)4 =
12y(0)2 +
14x(0)4 <
12δ2 +
14δ4 = ϕ(δ)
e12y(t)2 +
14x(t)4 ≥ 1
2y(t)2
12y(t)2 +
14x(t)4 ≥ 1
4x(t)4.
Percio y(t)2 ≤ 2ϕ(δ), x(t)2 ≤ 2√
ϕ(δ), ossia
x(t)2 + y(t)2 ≤ 2ϕ(δ) + 2√
ϕ(δ).
Inoltre ϕ(δ) → 0 per δ → 0 e quindi, se δ e sufficientemente piccolo, ϕ(δ) + 2√
ϕ(δ) < ε, il
che implica la tesi.
32. Risulta H(x, y) = y4 + sin2 x e si puo osservare che tale funzione ha un minimo stretto in
(0, 0). Pertanto, se ε e sufficientemente piccolo, risulta H0 = min{H(x, y) | x2 +y2 = ε2} > 0.
Sia ora 0 < δ < ε, tale che H(x, y) < H02 se x2 + y2 < δ2. Se x(0)2 + y(0)2 < δ2 allora
H(x(t), y(t)) = H(x(0), y(0)) < H02 e quindi x(t)2 + y(t)2 non puo prendere il valore ε2.
Allora, per continuita, dovra essere x(t)2 + y(t)2 < ε, ∀t.