DEFCON 22 Cesar Cerrudo Hacking Traffic Control Systems UPDATED
Control problems for traffic flow
Mauro Garavello
University of Milano Bicocca
OptHySYS
University of Trento, January 9-11, 2017
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
The LWR traffic flow model (1955, 1956)
∂t ρ+ ∂x f(ρ) = 0
• ρ(t, x): density of cars at time t > 0 and at the position x• f(ρ): flux of cars
f(ρ) = ρv, where v is the average velocity
• v depends only on ρ in a decreasing wayv(ρ) = Vmax
(1− ρ
ρmax
), ρmax: maximum density, Vmax: maximum velocity
• f(0) = f(ρmax) = 0 is a strictly concave function
ρ ρ
v f
σ ρmaxρmax
Vmax
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
The LWR traffic flow model (1955, 1956)
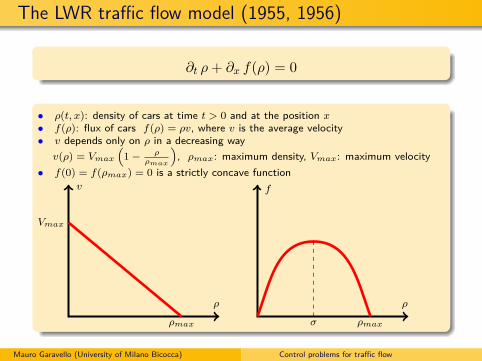
∂t ρ+ ∂x f(ρ) = 0
• ρ(t, x): density of cars at time t > 0 and at the position x
x
ρ
• f(ρ): flux of cars
f(ρ) = ρv, where v is the average velocity
• v depends only on ρ in a decreasing wayv(ρ) = Vmax
(1− ρ
ρmax
), ρmax: maximum density, Vmax: maximum velocity
• f(0) = f(ρmax) = 0 is a strictly concave function
ρ ρ
v f
σ ρmaxρmax
Vmax
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
The LWR traffic flow model (1955, 1956)
∂t ρ+ ∂x f(ρ) = 0
• ρ(t, x): density of cars at time t > 0 and at the position x• f(ρ): flux of cars
f(ρ) = ρv, where v is the average velocity• v depends only on ρ in a decreasing way
v(ρ) = Vmax
(1− ρ
ρmax
), ρmax: maximum density, Vmax: maximum velocity
• f(0) = f(ρmax) = 0 is a strictly concave function
ρ ρ
v f
σ ρmaxρmax
Vmax
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
The LWR traffic flow model (1955, 1956)
∂t ρ+ ∂x f(ρ) = 0
• ρ(t, x): density of cars at time t > 0 and at the position x• f(ρ): flux of cars f(ρ) = ρv, where v is the average velocity
• v depends only on ρ in a decreasing wayv(ρ) = Vmax
(1− ρ
ρmax
), ρmax: maximum density, Vmax: maximum velocity
• f(0) = f(ρmax) = 0 is a strictly concave function
ρ ρ
v f
σ ρmaxρmax
Vmax
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
The LWR traffic flow model (1955, 1956)
∂t ρ+ ∂x f(ρ) = 0
• ρ(t, x): density of cars at time t > 0 and at the position x• f(ρ): flux of cars f(ρ) = ρv, where v is the average velocity• v depends only on ρ in a decreasing way
v(ρ) = Vmax
(1− ρ
ρmax
), ρmax: maximum density, Vmax: maximum velocity
• f(0) = f(ρmax) = 0 is a strictly concave function
ρ ρ
v f
σ ρmaxρmax
Vmax
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
The LWR traffic flow model (1955, 1956)
∂t ρ+ ∂x f(ρ) = 0
• ρ(t, x): density of cars at time t > 0 and at the position x• f(ρ): flux of cars f(ρ) = ρv, where v is the average velocity• v depends only on ρ in a decreasing way
v(ρ) = Vmax
(1− ρ
ρmax
), ρmax: maximum density, Vmax: maximum velocity
• f(0) = f(ρmax) = 0 is a strictly concave function
ρ ρ
v f
σ ρmaxρmax
Vmax
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
The LWR traffic flow model (1955, 1956)
∂t ρ+ ∂x f(ρ) = 0
• ρ(t, x): density of cars at time t > 0 and at the position x• f(ρ): flux of cars f(ρ) = ρv, where v is the average velocity• v depends only on ρ in a decreasing way
v(ρ) = Vmax
(1− ρ
ρmax
), ρmax: maximum density, Vmax: maximum velocity
• f(0) = f(ρmax) = 0 is a strictly concave function
ρ ρ
v f
σ ρmaxρmax
Vmax
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
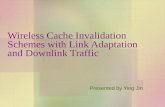
Traffic flow on a network of roads
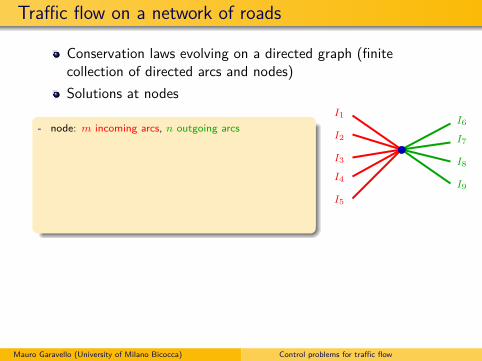
Conservation laws evolving on a directed graph (finitecollection of directed arcs and nodes)
Solutions at nodes
- node: m incoming arcs, n outgoing arcs- initial datum ρl in each arc Il, interval of R- This corresponds to m+ n IBV problems ∂t ρl+∂x f(ρl) = 0, x∈Il, l ∈ 1, · · · ,m+ n, t > 0
ρl(0, x) = ρl(x), x ∈ Il, l ∈ 1, · · · ,m+ nρl(t, 0) = ???, t > 0, l ∈ 1, · · · , n+m
Coupling transition condition at a node located at x = 0
Ψ(ρ1(t, 0), . . . , ρm+n(t, 0)) = 0
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Traffic flow on a network of roads
Conservation laws evolving on a directed graph (finitecollection of directed arcs and nodes)Solutions at nodes
- node: m incoming arcs, n outgoing arcs- initial datum ρl in each arc Il, interval of R- This corresponds to m+ n IBV problems ∂t ρl+∂x f(ρl) = 0, x∈Il, l ∈ 1, · · · ,m+ n, t > 0
ρl(0, x) = ρl(x), x ∈ Il, l ∈ 1, · · · ,m+ nρl(t, 0) = ???, t > 0, l ∈ 1, · · · , n+m
Coupling transition condition at a node located at x = 0
Ψ(ρ1(t, 0), . . . , ρm+n(t, 0)) = 0
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Traffic flow on a network of roads
Conservation laws evolving on a directed graph (finitecollection of directed arcs and nodes)Solutions at nodes
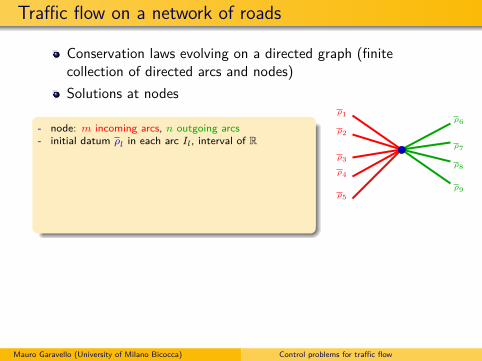
- node: m incoming arcs, n outgoing arcs
- initial datum ρl in each arc Il, interval of R- This corresponds to m+ n IBV problems ∂t ρl+∂x f(ρl) = 0, x∈Il, l ∈ 1, · · · ,m+ n, t > 0
ρl(0, x) = ρl(x), x ∈ Il, l ∈ 1, · · · ,m+ nρl(t, 0) = ???, t > 0, l ∈ 1, · · · , n+m
I1
I2
I3
I4
I5
I6
I7
I8
I9
Coupling transition condition at a node located at x = 0
Ψ(ρ1(t, 0), . . . , ρm+n(t, 0)) = 0
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Traffic flow on a network of roads
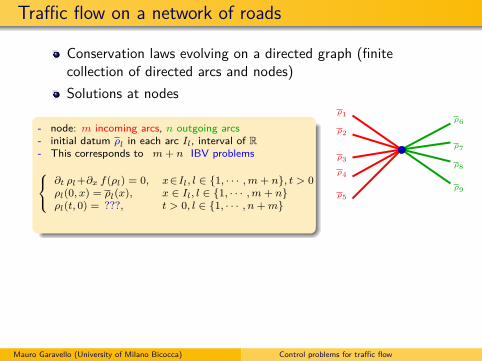
Conservation laws evolving on a directed graph (finitecollection of directed arcs and nodes)Solutions at nodes
- node: m incoming arcs, n outgoing arcs- initial datum ρl in each arc Il, interval of R
- This corresponds to m+ n IBV problems ∂t ρl+∂x f(ρl) = 0, x∈Il, l ∈ 1, · · · ,m+ n, t > 0ρl(0, x) = ρl(x), x ∈ Il, l ∈ 1, · · · ,m+ nρl(t, 0) = ???, t > 0, l ∈ 1, · · · , n+m
ρ1
ρ2
ρ3
ρ4
ρ5
ρ6
ρ7
ρ8
ρ9
Coupling transition condition at a node located at x = 0
Ψ(ρ1(t, 0), . . . , ρm+n(t, 0)) = 0
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Traffic flow on a network of roads
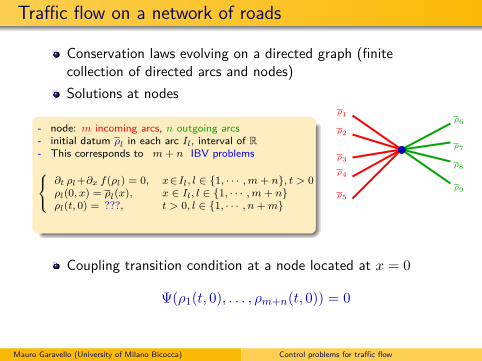
Conservation laws evolving on a directed graph (finitecollection of directed arcs and nodes)Solutions at nodes
- node: m incoming arcs, n outgoing arcs- initial datum ρl in each arc Il, interval of R- This corresponds to m+ n IBV problems ∂t ρl+∂x f(ρl) = 0, x∈Il, l ∈ 1, · · · ,m+ n, t > 0
ρl(0, x) = ρl(x), x ∈ Il, l ∈ 1, · · · ,m+ nρl(t, 0) = ???, t > 0, l ∈ 1, · · · , n+m
ρ1
ρ2
ρ3
ρ4
ρ5
ρ6
ρ7
ρ8
ρ9
Coupling transition condition at a node located at x = 0
Ψ(ρ1(t, 0), . . . , ρm+n(t, 0)) = 0
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Traffic flow on a network of roads
Conservation laws evolving on a directed graph (finitecollection of directed arcs and nodes)Solutions at nodes
- node: m incoming arcs, n outgoing arcs- initial datum ρl in each arc Il, interval of R- This corresponds to m+ n IBV problems ∂t ρl+∂x f(ρl) = 0, x∈Il, l ∈ 1, · · · ,m+ n, t > 0
ρl(0, x) = ρl(x), x ∈ Il, l ∈ 1, · · · ,m+ nρl(t, 0) = ???, t > 0, l ∈ 1, · · · , n+m
ρ1
ρ2
ρ3
ρ4
ρ5
ρ6
ρ7
ρ8
ρ9
Coupling transition condition at a node located at x = 0
Ψ(ρ1(t, 0), . . . , ρm+n(t, 0)) = 0
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
PDEs on networks
Vehicular traffic (scalar and systems)
Air traffic managementGas pipelines (systems)Supply chains (scalar)Blood circulatory flow & vascular stents (systems)Irrigation channels (systems)Biological networks (scalar)Telecommunication and data networks (scalar)
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
PDEs on networks
Vehicular traffic (scalar and systems)Air traffic management
Gas pipelines (systems)Supply chains (scalar)Blood circulatory flow & vascular stents (systems)Irrigation channels (systems)Biological networks (scalar)Telecommunication and data networks (scalar)
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
PDEs on networks
Vehicular traffic (scalar and systems)Air traffic managementGas pipelines (systems)
Supply chains (scalar)Blood circulatory flow & vascular stents (systems)Irrigation channels (systems)Biological networks (scalar)Telecommunication and data networks (scalar)
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
PDEs on networks
Vehicular traffic (scalar and systems)Air traffic managementGas pipelines (systems)Supply chains (scalar)
Blood circulatory flow & vascular stents (systems)Irrigation channels (systems)Biological networks (scalar)Telecommunication and data networks (scalar)
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
PDEs on networks
Vehicular traffic (scalar and systems)Air traffic managementGas pipelines (systems)Supply chains (scalar)Blood circulatory flow & vascular stents (systems)
Irrigation channels (systems)Biological networks (scalar)Telecommunication and data networks (scalar)
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
PDEs on networks
Vehicular traffic (scalar and systems)Air traffic managementGas pipelines (systems)Supply chains (scalar)Blood circulatory flow & vascular stents (systems)Irrigation channels (systems)
Biological networks (scalar)Telecommunication and data networks (scalar)
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
PDEs on networks
Vehicular traffic (scalar and systems)Air traffic managementGas pipelines (systems)Supply chains (scalar)Blood circulatory flow & vascular stents (systems)Irrigation channels (systems)Biological networks (scalar)
Telecommunication and data networks (scalar)
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
PDEs on networks
Vehicular traffic (scalar and systems)Air traffic managementGas pipelines (systems)Supply chains (scalar)Blood circulatory flow & vascular stents (systems)Irrigation channels (systems)Biological networks (scalar)Telecommunication and data networks (scalar)
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
PDEs on networks
Vehicular traffic (scalar and systems)Air traffic managementGas pipelines (systems)Supply chains (scalar)Blood circulatory flow & vascular stents (systems)Irrigation channels (systems)Biological networks (scalar)Telecommunication and data networks (scalar)
Achdou, Andreianov, Banda, Bastin, Bressan, Camilli, Canic, Chalons,Coclite, Colombo, Coron, Costeseque, D’Apice, Delle Monache,Donadello, Gasser, Goatin, Göttlich, Guerra, Gugat, Han, Herty, Holden,Imbert, Klar, Lattanzio, Lebacque, Leugering, Manzo, Marcellini, Marchi,Monneau, Moutari, Nguyen, Marigo, Piccoli, Rascle, Risebro, Rosini,Schleper, Shen, Tchou, Zidani, Ziegler...
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Nodal conditions on road networks
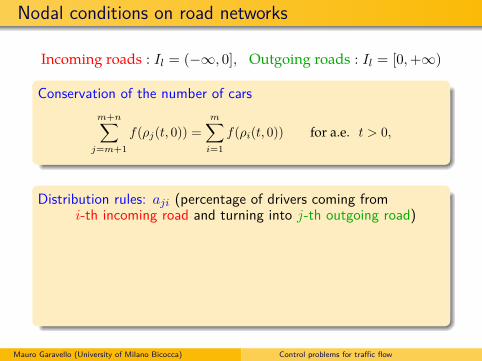
Incoming roads : Il = (−∞, 0], Outgoing roads : Il = [0,+∞)
Conservation of the number of cars
m+n∑j=m+1
f(ρj(t, 0)) =
m∑i=1
f(ρi(t, 0)) for a.e. t > 0,
Distribution rules: aji (percentage of drivers coming fromi-th incoming road and turning into j-th outgoing road)
f(ρj(t, 0)) =m∑i=1
aji(t)f(ρi(t, 0)) for a.e. t > 0,
0 ≤ aji(t) ≤ 1 ∀ j, im+n∑
j=m+1
aji(t) = 1 ∀ i
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Nodal conditions on road networks
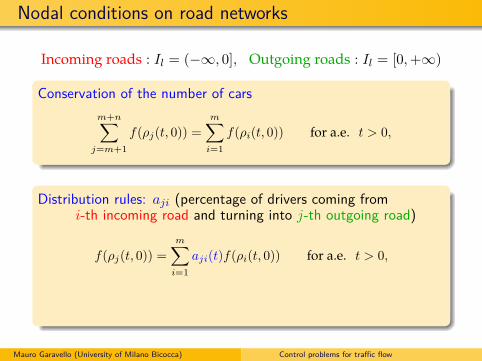
Incoming roads : Il = (−∞, 0], Outgoing roads : Il = [0,+∞)
Conservation of the number of cars
m+n∑j=m+1
f(ρj(t, 0)) =
m∑i=1
f(ρi(t, 0)) for a.e. t > 0,
Distribution rules: aji (percentage of drivers coming fromi-th incoming road and turning into j-th outgoing road)
f(ρj(t, 0)) =m∑i=1
aji(t)f(ρi(t, 0)) for a.e. t > 0,
0 ≤ aji(t) ≤ 1 ∀ j, im+n∑
j=m+1
aji(t) = 1 ∀ i
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Nodal conditions on road networks
Incoming roads : Il = (−∞, 0], Outgoing roads : Il = [0,+∞)
Conservation of the number of carsm+n∑
j=m+1
f(ρj(t, 0)) =
m∑i=1
f(ρi(t, 0)) for a.e. t > 0,
Distribution rules: aji (percentage of drivers coming fromi-th incoming road and turning into j-th outgoing road)
f(ρj(t, 0)) =m∑i=1
aji(t)f(ρi(t, 0)) for a.e. t > 0,
0 ≤ aji(t) ≤ 1 ∀ j, im+n∑
j=m+1
aji(t) = 1 ∀ i
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Nodal conditions on road networks
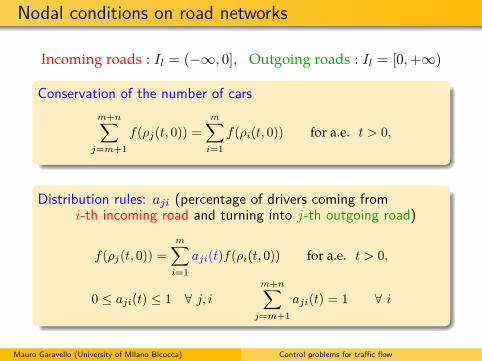
Incoming roads : Il = (−∞, 0], Outgoing roads : Il = [0,+∞)
Conservation of the number of carsm+n∑
j=m+1
f(ρj(t, 0)) =
m∑i=1
f(ρi(t, 0)) for a.e. t > 0,
Distribution rules: aji (percentage of drivers coming fromi-th incoming road and turning into j-th outgoing road)
f(ρj(t, 0)) =m∑i=1
aji(t)f(ρi(t, 0)) for a.e. t > 0,
0 ≤ aji(t) ≤ 1 ∀ j, im+n∑
j=m+1
aji(t) = 1 ∀ i
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Nodal conditions on road networks
Incoming roads : Il = (−∞, 0], Outgoing roads : Il = [0,+∞)
Conservation of the number of carsm+n∑
j=m+1
f(ρj(t, 0)) =
m∑i=1
f(ρi(t, 0)) for a.e. t > 0,
Distribution rules: aji (percentage of drivers coming fromi-th incoming road and turning into j-th outgoing road)
f(ρj(t, 0)) =m∑i=1
aji(t)f(ρi(t, 0)) for a.e. t > 0,
0 ≤ aji(t) ≤ 1 ∀ j, im+n∑
j=m+1
aji(t) = 1 ∀ i
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Nodal conditions on road networks
Incoming roads : Il = (−∞, 0], Outgoing roads : Il = [0,+∞)
Conservation of the number of carsm+n∑
j=m+1
f(ρj(t, 0)) =
m∑i=1
f(ρi(t, 0)) for a.e. t > 0,
Distribution rules: aji (percentage of drivers coming fromi-th incoming road and turning into j-th outgoing road)
f(ρj(t, 0)) =m∑i=1
aji(t)f(ρi(t, 0)) for a.e. t > 0,
0 ≤ aji(t) ≤ 1 ∀ j, im+n∑
j=m+1
aji(t) = 1 ∀ i
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Nodal conditions on road networks. . . continued
Remark: distribution rules are not sufficient to select uniquesolution at the junction.
wwwOptimization criterion imposed on the traces of the solution[maximize the flux through the junction]
Priority rules: ci [percentage of time drivers from i-th incomingroad passing through the junction],
∑mi=1 ci(t) = 1
(when m > n and the total possible flux on the incoming roads islarger than the maximal flux that the outgoing roads can handle)
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Nodal conditions on road networks. . . continued
Remark: distribution rules are not sufficient to select uniquesolution at the junction. www
Optimization criterion imposed on the traces of the solution[maximize the flux through the junction]
Priority rules: ci [percentage of time drivers from i-th incomingroad passing through the junction],
∑mi=1 ci(t) = 1
(when m > n and the total possible flux on the incoming roads islarger than the maximal flux that the outgoing roads can handle)
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Nodal conditions on road networks. . . continued
Remark: distribution rules are not sufficient to select uniquesolution at the junction. wwwOptimization criterion imposed on the traces of the solution[maximize the flux through the junction]
Priority rules: ci [percentage of time drivers from i-th incomingroad passing through the junction],
∑mi=1 ci(t) = 1
(when m > n and the total possible flux on the incoming roads islarger than the maximal flux that the outgoing roads can handle)
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Nodal conditions on road networks. . . continued
Remark: distribution rules are not sufficient to select uniquesolution at the junction. wwwOptimization criterion imposed on the traces of the solution[maximize the flux through the junction]
Priority rules: ci [percentage of time drivers from i-th incomingroad passing through the junction],
∑mi=1 ci(t) = 1
(when m > n and the total possible flux on the incoming roads islarger than the maximal flux that the outgoing roads can handle)
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Nodal conditions on road networks. . . continued
Remark: distribution rules are not sufficient to select uniquesolution at the junction. wwwOptimization criterion imposed on the traces of the solution[maximize the flux through the junction]
Priority rules: ci [percentage of time drivers from i-th incomingroad passing through the junction],
∑mi=1 ci(t) = 1
(when m > n and the total possible flux on the incoming roads islarger than the maximal flux that the outgoing roads can handle)
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Riemann problem approach[Holden, Risebro (1995); Coclite, G., Piccoli (2005) - ]
Junction Riemann Solver (JRS): provide nodal conditions anda procedure for (uniquely) solving m+ n IBV (Riemann)problems at m incoming and n outgoing roads when initialdata are constants. Solutions are required to be self-similar asfor classical Riemann problems.
Construct front tracking approximate solutions with piecewiseconstant initial data on each road.
A-priori BV bounds yield the convergence of front trackingapproximations to the (unique?) solution of the Cauchyproblem at the node with general initial data (having finitetotal variation).
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Riemann problem approach[Holden, Risebro (1995); Coclite, G., Piccoli (2005) - ]
Junction Riemann Solver (JRS): provide nodal conditions anda procedure for (uniquely) solving m+ n IBV (Riemann)problems at m incoming and n outgoing roads when initialdata are constants. Solutions are required to be self-similar asfor classical Riemann problems.
Construct front tracking approximate solutions with piecewiseconstant initial data on each road.
A-priori BV bounds yield the convergence of front trackingapproximations to the (unique?) solution of the Cauchyproblem at the node with general initial data (having finitetotal variation).
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Riemann problem approach[Holden, Risebro (1995); Coclite, G., Piccoli (2005) - ]
Junction Riemann Solver (JRS): provide nodal conditions anda procedure for (uniquely) solving m+ n IBV (Riemann)problems at m incoming and n outgoing roads when initialdata are constants. Solutions are required to be self-similar asfor classical Riemann problems.
Construct front tracking approximate solutions with piecewiseconstant initial data on each road.
A-priori BV bounds yield the convergence of front trackingapproximations to the (unique?) solution of the Cauchyproblem at the node with general initial data (having finitetotal variation).
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Riemann problem approach[Holden, Risebro (1995); Coclite, G., Piccoli (2005) - ]
Junction Riemann Solver (JRS): provide nodal conditions anda procedure for (uniquely) solving m+ n IBV (Riemann)problems at m incoming and n outgoing roads when initialdata are constants. Solutions are required to be self-similar asfor classical Riemann problems.
Construct front tracking approximate solutions with piecewiseconstant initial data on each road.
A-priori BV bounds yield the convergence of front trackingapproximations to the (unique?) solution of the Cauchyproblem at the node with general initial data (having finitetotal variation).
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Junction Riemann Solver
A Riemann problem at a node is a Cauchy problem with constantinitial condition on each arc Il:
∂t ρl + ∂x f(ρl) = 0, x ∈ Il, l ∈ 1, . . . ,m+ n, t > 0
ρl(0, x) = ρl, x ∈ Il, l ∈ 1, . . . ,m+ n
Giving a solution is equivalent to giving its trace at the node:ρl(t, 0) = ρl t > 0, l ∈ 1, . . . ,m+ n
A Riemann solver at the node is a mapRS : [0, ρmax]
m+n → [0, ρmax]m+n,
(ρ1, . . . , ρm+n) 7→ (ρ1, . . . , ρm+n)
that associates to an (m+ n)-tuple of constant initial data an(m+ n)-tuple of constant boundary data which are the tracesat the node of the solution to the corresponding Riemann problem.
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Junction Riemann Solver
A Riemann problem at a node is a Cauchy problem with constantinitial condition on each arc Il:
∂t ρl + ∂x f(ρl) = 0, x ∈ Il, l ∈ 1, . . . ,m+ n, t > 0
ρl(0, x) = ρl, x ∈ Il, l ∈ 1, . . . ,m+ n
Giving a solution is equivalent to giving its trace at the node:ρl(t, 0) = ρl t > 0, l ∈ 1, . . . ,m+ n
A Riemann solver at the node is a mapRS : [0, ρmax]
m+n → [0, ρmax]m+n,
(ρ1, . . . , ρm+n) 7→ (ρ1, . . . , ρm+n)
that associates to an (m+ n)-tuple of constant initial data an(m+ n)-tuple of constant boundary data which are the tracesat the node of the solution to the corresponding Riemann problem.
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Junction Riemann Solver
A Riemann problem at a node is a Cauchy problem with constantinitial condition on each arc Il:
∂t ρl + ∂x f(ρl) = 0, x ∈ Il, l ∈ 1, . . . ,m+ n, t > 0
ρl(0, x) = ρl, x ∈ Il, l ∈ 1, . . . ,m+ n
Giving a solution is equivalent to giving its trace at the node:ρl(t, 0) = ρl t > 0, l ∈ 1, . . . ,m+ n
A Riemann solver at the node is a mapRS : [0, ρmax]
m+n → [0, ρmax]m+n,
(ρ1, . . . , ρm+n) 7→ (ρ1, . . . , ρm+n)
that associates to an (m+ n)-tuple of constant initial data an(m+ n)-tuple of constant boundary data which are the tracesat the node of the solution to the corresponding Riemann problem.
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Junction Riemann Solver
A Riemann problem at a node is a Cauchy problem with constantinitial condition on each arc Il:
∂t ρl + ∂x f(ρl) = 0, x ∈ Il, l ∈ 1, . . . ,m+ n, t > 0
ρl(0, x) = ρl, x ∈ Il, l ∈ 1, . . . ,m+ n
Giving a solution is equivalent to giving its trace at the node:ρl(t, 0) = ρl t > 0, l ∈ 1, . . . ,m+ n
A Riemann solver at the node is a mapRS : [0, ρmax]
m+n → [0, ρmax]m+n,
(ρ1, . . . , ρm+n) 7→ (ρ1, . . . , ρm+n)
that associates to an (m+ n)-tuple of constant initial data an(m+ n)-tuple of constant boundary data which are the tracesat the node of the solution to the corresponding Riemann problem.
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
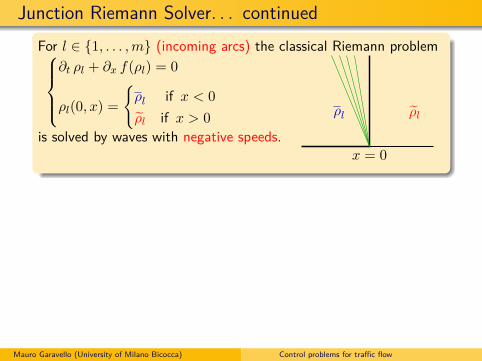
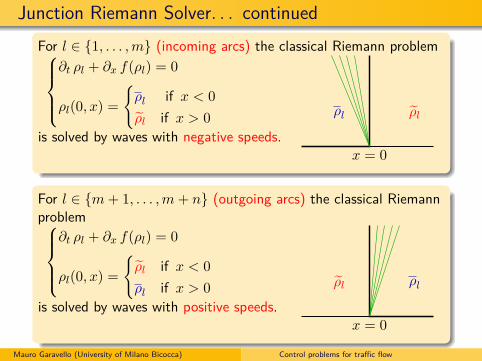
Junction Riemann Solver. . . continuedFor l ∈ 1, . . . ,m (incoming arcs) the classical Riemann problem
∂t ρl + ∂x f(ρl) = 0
ρl(0, x) =
ρl if x < 0
ρl if x > 0
is solved by waves with negative speeds.ρl ρl
x = 0
For l ∈ m+ 1, . . . ,m+ n (outgoing arcs) the classical Riemannproblem
∂t ρl + ∂x f(ρl) = 0
ρl(0, x) =
ρl if x < 0
ρl if x > 0
is solved by waves with positive speeds.ρl ρl
x = 0
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Junction Riemann Solver. . . continuedFor l ∈ 1, . . . ,m (incoming arcs) the classical Riemann problem
∂t ρl + ∂x f(ρl) = 0
ρl(0, x) =
ρl if x < 0
ρl if x > 0
is solved by waves with negative speeds.ρl ρl
x = 0
For l ∈ m+ 1, . . . ,m+ n (outgoing arcs) the classical Riemannproblem
∂t ρl + ∂x f(ρl) = 0
ρl(0, x) =
ρl if x < 0
ρl if x > 0
is solved by waves with positive speeds.ρl ρl
x = 0
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Solution for the Junction Riemann Problem
Fix a distribution Markov matrix A ∈ M(n×m) (Drivers’ preferences)
Impose the linear constraints
A · (f(ρ1(t, 0)), . . . , f(ρm(t, 0)))T = (f(ρm+1(t, 0)), . . . , f(ρm+n(t, 0)))T
on the traces of the fluxes (flux distribution ↔ matrix A)Choose the self-similar solution which maximizes
∑nl=1 f(ρl(t, 0))
If needed (m > n), prescribe relative priority rules
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Solution for the Junction Riemann Problem
Fix a distribution Markov matrix A ∈ M(n×m) (Drivers’ preferences)Impose the linear constraints
A · (f(ρ1(t, 0)), . . . , f(ρm(t, 0)))T = (f(ρm+1(t, 0)), . . . , f(ρm+n(t, 0)))T
on the traces of the fluxes (flux distribution ↔ matrix A)
Choose the self-similar solution which maximizes∑n
l=1 f(ρl(t, 0))
If needed (m > n), prescribe relative priority rules
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Solution for the Junction Riemann Problem
Fix a distribution Markov matrix A ∈ M(n×m) (Drivers’ preferences)Impose the linear constraints
A · (f(ρ1(t, 0)), . . . , f(ρm(t, 0)))T = (f(ρm+1(t, 0)), . . . , f(ρm+n(t, 0)))T
on the traces of the fluxes (flux distribution ↔ matrix A)Choose the self-similar solution which maximizes
∑nl=1 f(ρl(t, 0))
If needed (m > n), prescribe relative priority rules
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Solution for the Junction Riemann Problem
Fix a distribution Markov matrix A ∈ M(n×m) (Drivers’ preferences)Impose the linear constraints
A · (f(ρ1(t, 0)), . . . , f(ρm(t, 0)))T = (f(ρm+1(t, 0)), . . . , f(ρm+n(t, 0)))T
on the traces of the fluxes (flux distribution ↔ matrix A)Choose the self-similar solution which maximizes
∑nl=1 f(ρl(t, 0))
If needed (m > n), prescribe relative priority rules
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Solution for the Junction Riemann Problem
Fix a distribution Markov matrix A ∈ M(n×m) (Drivers’ preferences)Impose the linear constraints
A · (f(ρ1(t, 0)), . . . , f(ρm(t, 0)))T = (f(ρm+1(t, 0)), . . . , f(ρm+n(t, 0)))T
on the traces of the fluxes (flux distribution ↔ matrix A)Choose the self-similar solution which maximizes
∑nl=1 f(ρl(t, 0))
If needed (m > n), prescribe relative priority rules
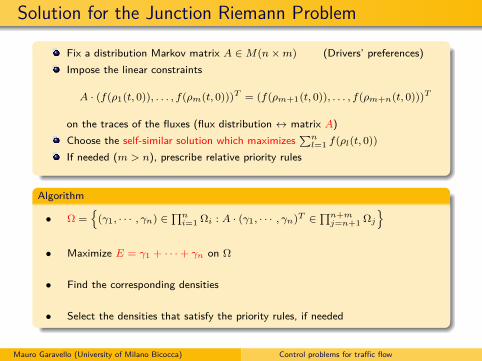
Algorithm
• Ω =(γ1, · · · , γn) ∈
∏ni=1 Ωi : A · (γ1, · · · , γn)T ∈
∏n+mj=n+1 Ωj
• Maximize E = γ1 + · · ·+ γn on Ω
• Find the corresponding densities
• Select the densities that satisfy the priority rules, if needed
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
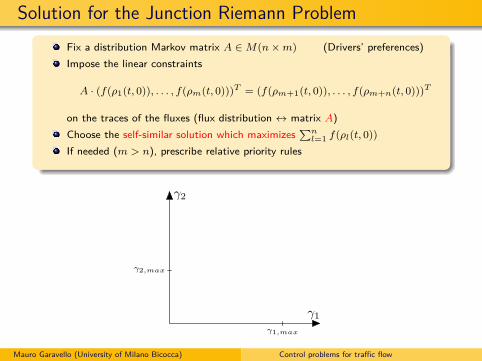
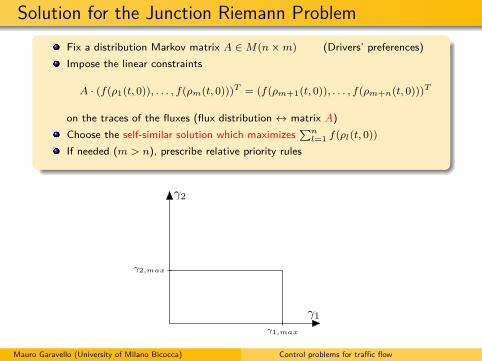
Solution for the Junction Riemann ProblemFix a distribution Markov matrix A ∈ M(n×m) (Drivers’ preferences)Impose the linear constraints
A · (f(ρ1(t, 0)), . . . , f(ρm(t, 0)))T = (f(ρm+1(t, 0)), . . . , f(ρm+n(t, 0)))T
on the traces of the fluxes (flux distribution ↔ matrix A)Choose the self-similar solution which maximizes
∑nl=1 f(ρl(t, 0))
If needed (m > n), prescribe relative priority rules
γ1
γ2
γ1,max
γ2,max
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
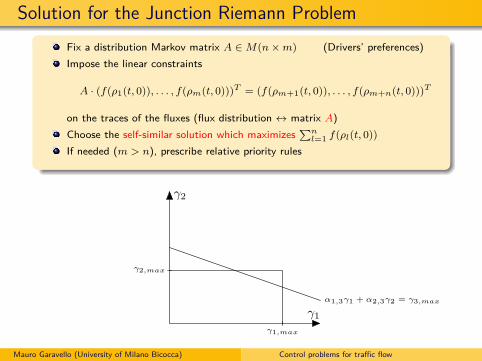
Solution for the Junction Riemann ProblemFix a distribution Markov matrix A ∈ M(n×m) (Drivers’ preferences)Impose the linear constraints
A · (f(ρ1(t, 0)), . . . , f(ρm(t, 0)))T = (f(ρm+1(t, 0)), . . . , f(ρm+n(t, 0)))T
on the traces of the fluxes (flux distribution ↔ matrix A)Choose the self-similar solution which maximizes
∑nl=1 f(ρl(t, 0))
If needed (m > n), prescribe relative priority rules
γ1
γ2
γ1,max
γ2,max
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
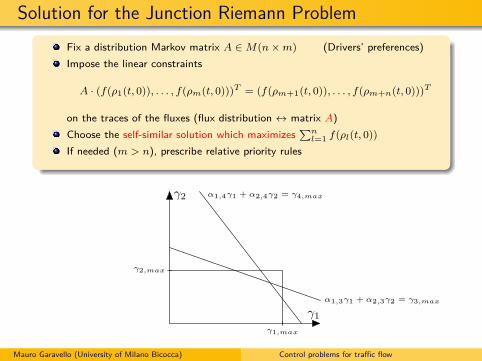
Solution for the Junction Riemann ProblemFix a distribution Markov matrix A ∈ M(n×m) (Drivers’ preferences)Impose the linear constraints
A · (f(ρ1(t, 0)), . . . , f(ρm(t, 0)))T = (f(ρm+1(t, 0)), . . . , f(ρm+n(t, 0)))T
on the traces of the fluxes (flux distribution ↔ matrix A)Choose the self-similar solution which maximizes
∑nl=1 f(ρl(t, 0))
If needed (m > n), prescribe relative priority rules
γ1
γ2
γ1,max
γ2,max
α1,3γ1 + α2,3γ2 = γ3,max
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
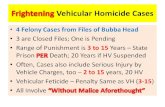
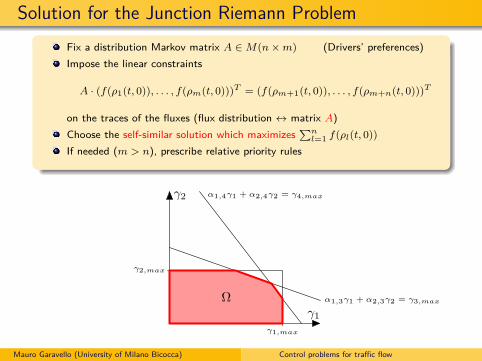
Solution for the Junction Riemann ProblemFix a distribution Markov matrix A ∈ M(n×m) (Drivers’ preferences)Impose the linear constraints
A · (f(ρ1(t, 0)), . . . , f(ρm(t, 0)))T = (f(ρm+1(t, 0)), . . . , f(ρm+n(t, 0)))T
on the traces of the fluxes (flux distribution ↔ matrix A)Choose the self-similar solution which maximizes
∑nl=1 f(ρl(t, 0))
If needed (m > n), prescribe relative priority rules
γ1
γ2
γ1,max
γ2,max
α1,3γ1 + α2,3γ2 = γ3,max
α1,4γ1 + α2,4γ2 = γ4,max
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Solution for the Junction Riemann ProblemFix a distribution Markov matrix A ∈ M(n×m) (Drivers’ preferences)Impose the linear constraints
A · (f(ρ1(t, 0)), . . . , f(ρm(t, 0)))T = (f(ρm+1(t, 0)), . . . , f(ρm+n(t, 0)))T
on the traces of the fluxes (flux distribution ↔ matrix A)Choose the self-similar solution which maximizes
∑nl=1 f(ρl(t, 0))
If needed (m > n), prescribe relative priority rules
γ1
γ2
γ1,max
γ2,max
α1,3γ1 + α2,3γ2 = γ3,max
α1,4γ1 + α2,4γ2 = γ4,max
Ω
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
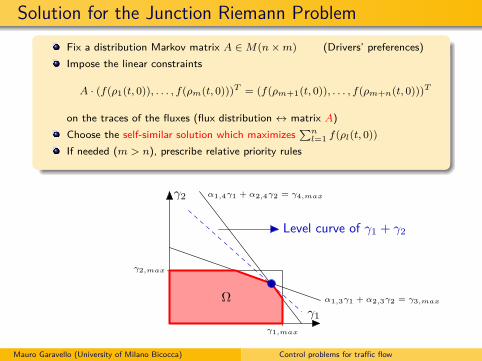
Solution for the Junction Riemann ProblemFix a distribution Markov matrix A ∈ M(n×m) (Drivers’ preferences)Impose the linear constraints
A · (f(ρ1(t, 0)), . . . , f(ρm(t, 0)))T = (f(ρm+1(t, 0)), . . . , f(ρm+n(t, 0)))T
on the traces of the fluxes (flux distribution ↔ matrix A)Choose the self-similar solution which maximizes
∑nl=1 f(ρl(t, 0))
If needed (m > n), prescribe relative priority rules
γ1
γ2
γ1,max
γ2,max
α1,3γ1 + α2,3γ2 = γ3,max
α1,4γ1 + α2,4γ2 = γ4,max
Ω
Level curve of γ1 + γ2
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Matrix A as a control function
Theorem: existence of solution (G., Piccoli)Assume that the traffic distribution matrix A = A(t) is time dependentand BV (control function). Fix initial data ρl,0 ∈
(BV ∩ L1
)(Il;R).
Then, for every T > 0, there exists a solution (ρ1, . . . , ρn+m) for theCauchy problem
∂∂tρl +
∂∂xf(ρl) = 0
ρl(0, x) = ρl,0(x)l = 1, . . . , n+m
such that
RSA(t)(ρ1(t, 0), . . . , ρn+m(t, 0)) = (ρ1(t, 0), . . . , ρn+m(t, 0))
for a.e. t ∈ [0, T ].
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
A different approach: a control theoretic point of view
Fix T > 0. Find the solution on [0, T ] to the Cauchy problem∂t ρl + ∂x f(ρl) = 0, x ∈ Il, l ∈ 1, . . . , n+m, t > 0
ρl(0, x) = ρl(x), x ∈ Il, l ∈ 1, . . . , n+m,
that satisfies the flux constraint
A · (f(ρ1(t, 0)), . . . , f(ρm(t, 0)))T = (f(ρm+1(t, 0)), . . . , f(ρm+n(t, 0)))T
and maximizes an integral cost∫ T
0
m∑l=1
f (ρl(t, 0)) dt
The maximization is global on [0, T ] among all admissiblesolutions (fulfilling linear flux constraints) and not pointwisein time
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
A different approach: a control theoretic point of view
Fix T > 0. Find the solution on [0, T ] to the Cauchy problem∂t ρl + ∂x f(ρl) = 0, x ∈ Il, l ∈ 1, . . . , n+m, t > 0
ρl(0, x) = ρl(x), x ∈ Il, l ∈ 1, . . . , n+m,
that satisfies the flux constraint
A · (f(ρ1(t, 0)), . . . , f(ρm(t, 0)))T = (f(ρm+1(t, 0)), . . . , f(ρm+n(t, 0)))T
and maximizes an integral cost∫ T
0J (f (ρ1(t, 0)) , . . . , f (ρm(t, 0))) dt (J : Rm → R).
The maximization is global on [0, T ] among all admissiblesolutions (fulfilling linear flux constraints) and not pointwisein time
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
A different approach: a control theoretic point of view
Fix T > 0. Find the solution on [0, T ] to the Cauchy problem∂t ρl + ∂x f(ρl) = 0, x ∈ Il, l ∈ 1, . . . , n+m, t > 0
ρl(0, x) = ρl(x), x ∈ Il, l ∈ 1, . . . , n+m,
that satisfies the flux constraint
A · (f(ρ1(t, 0)), . . . , f(ρm(t, 0)))T = (f(ρm+1(t, 0)), . . . , f(ρm+n(t, 0)))T
and maximizes an integral cost∫ T
0J (f (ρ1(t, 0)) , . . . , f (ρm(t, 0))) dt (J : Rm → R).
The maximization is global on [0, T ] among all admissiblesolutions (fulfilling linear flux constraints) and not pointwisein time
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
New features of optimal solutions
In general there is no Junction Riemann Solver compatiblewith an optimal solution.
Optimal solutions with constant initial densities are in generalnot self-similar.
No uniqueness of optimal solutions without further conditions(control theoretic perspective not a modelling one).
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
New features of optimal solutions
In general there is no Junction Riemann Solver compatiblewith an optimal solution.
Optimal solutions with constant initial densities are in generalnot self-similar.
No uniqueness of optimal solutions without further conditions(control theoretic perspective not a modelling one).
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
New features of optimal solutions
In general there is no Junction Riemann Solver compatiblewith an optimal solution.
Optimal solutions with constant initial densities are in generalnot self-similar.
No uniqueness of optimal solutions without further conditions(control theoretic perspective not a modelling one).
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Admissible flux traces
Given:T,M > 0,
initial data ρl : Il → [0, ρmax], l ∈ 1, . . . ,m+ n,
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Admissible flux traces
Given:T,M > 0,initial data ρl : Il → [0, ρmax], l ∈ 1, . . . ,m+ n,
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Admissible flux traces
Given:T,M > 0,initial data ρl : Il → [0, ρmax], l ∈ 1, . . . ,m+ n,
Consider:
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
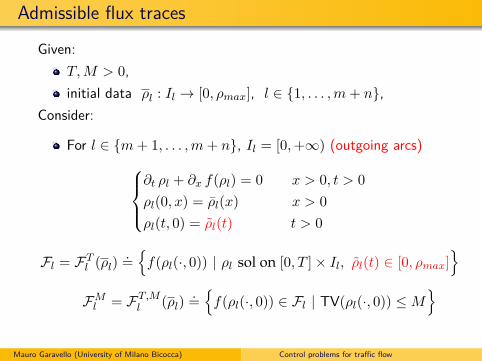
Admissible flux tracesGiven:
T,M > 0,initial data ρl : Il → [0, ρmax], l ∈ 1, . . . ,m+ n,
Consider:
For l ∈ 1, . . . ,m, Il = (−∞, 0] (incoming arcs)∂t ρl + ∂x f(ρl) = 0 x < 0, t > 0
ρl(0, x) = ρl(x) x < 0
ρl(t, 0) = ρl(t) t > 0
Fl = FTl (ρl)
.=f(ρl(·, 0)) | ρl sol on [0, T ]× Il, ρl(t) ∈ [0, ρmax]
FMl = FT,M
l (ρl).=f(ρl(·, 0)) ∈ Fl | TV(ρl(·, 0)) ≤ M
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Admissible flux tracesGiven:
T,M > 0,initial data ρl : Il → [0, ρmax], l ∈ 1, . . . ,m+ n,
Consider:
For l ∈ m+ 1, . . . ,m+ n, Il = [0,+∞) (outgoing arcs)∂t ρl + ∂x f(ρl) = 0 x > 0, t > 0
ρl(0, x) = ρl(x) x > 0
ρl(t, 0) = ρl(t) t > 0
Fl = FTl (ρl)
.=f(ρl(·, 0)) | ρl sol on [0, T ]× Il, ρl(t) ∈ [0, ρmax]
FMl = FT,M
l (ρl).=f(ρl(·, 0)) ∈ Fl | TV(ρl(·, 0)) ≤ M
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
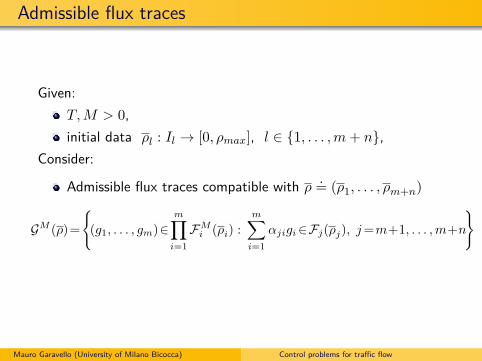
Admissible flux traces
Given:T,M > 0,initial data ρl : Il → [0, ρmax], l ∈ 1, . . . ,m+ n,
Consider:
Admissible flux traces compatible with ρ.= (ρ1, . . . , ρm+n)
GM (ρ)=
(g1, . . . , gm)∈
m∏i=1
FMi (ρi) :
m∑i=1
αjigi∈Fj(ρj), j=m+1, . . . ,m+n
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
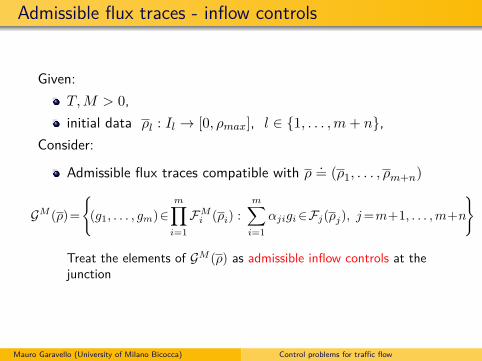
Admissible flux traces - inflow controls
Given:T,M > 0,initial data ρl : Il → [0, ρmax], l ∈ 1, . . . ,m+ n,
Consider:
Admissible flux traces compatible with ρ.= (ρ1, . . . , ρm+n)
GM (ρ)=
(g1, . . . , gm)∈
m∏i=1
FMi (ρi) :
m∑i=1
αjigi∈Fj(ρj), j=m+1, . . . ,m+n
Treat the elements of GM (ρ) as admissible inflow controls at thejunction
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
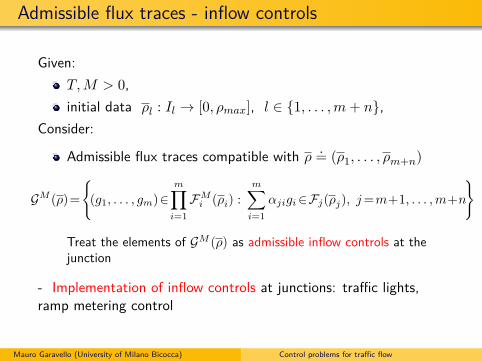
Admissible flux traces - inflow controls
Given:T,M > 0,initial data ρl : Il → [0, ρmax], l ∈ 1, . . . ,m+ n,
Consider:
Admissible flux traces compatible with ρ.= (ρ1, . . . , ρm+n)
GM (ρ)=
(g1, . . . , gm)∈
m∏i=1
FMi (ρi) :
m∑i=1
αjigi∈Fj(ρj), j=m+1, . . . ,m+n
Treat the elements of GM (ρ) as admissible inflow controls at thejunction
- Implementation of inflow controls at junctions: traffic lights,ramp metering control
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
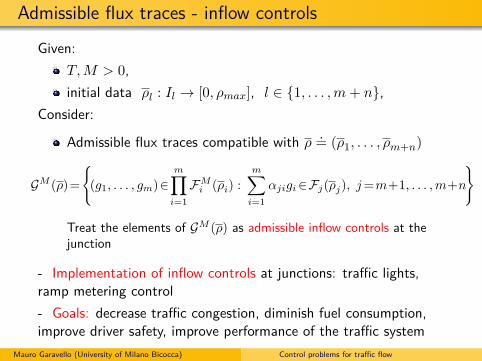
Admissible flux traces - inflow controlsGiven:
T,M > 0,initial data ρl : Il → [0, ρmax], l ∈ 1, . . . ,m+ n,
Consider:
Admissible flux traces compatible with ρ.= (ρ1, . . . , ρm+n)
GM (ρ)=
(g1, . . . , gm)∈
m∏i=1
FMi (ρi) :
m∑i=1
αjigi∈Fj(ρj), j=m+1, . . . ,m+n
Treat the elements of GM (ρ) as admissible inflow controls at thejunction
- Implementation of inflow controls at junctions: traffic lights,ramp metering control- Goals: decrease traffic congestion, diminish fuel consumption,improve driver safety, improve performance of the traffic system
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
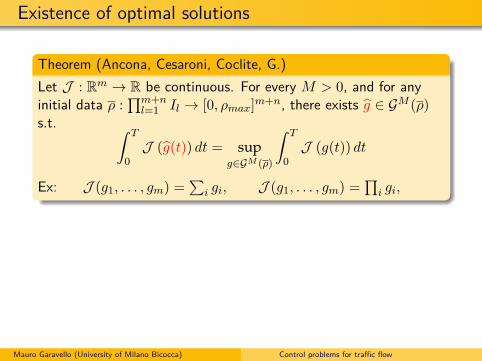
Existence of optimal solutions
Theorem (Ancona, Cesaroni, Coclite, G.)Let J : Rm → R be continuous. For every M > 0, and for anyinitial data ρ :
∏m+nl=1 Il → [0, ρmax]
m+n, there exists g ∈ GM (ρ)s.t. ∫ T
0J (g(t)) dt = sup
g∈GM (ρ)
∫ T
0J (g(t)) dt
Ex: J (g1, . . . , gm) =∑
i gi, J (g1, . . . , gm) =∏
i gi,
Proof:
Uniform BV bounds and Helly’s Compactness Theorem=⇒ convergence of subsequence of flux tracesDivergence Theorem on [−max |f ′(ρ)| · T, 0]× [0, T ]=⇒ convergence of flux traces of solutions to flux traceof limit solution
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Existence of optimal solutions
Theorem (Ancona, Cesaroni, Coclite, G.)Let J : Rm → R be continuous. For every M > 0, and for anyinitial data ρ :
∏m+nl=1 Il → [0, ρmax]
m+n, there exists g ∈ GM (ρ)s.t. ∫ T
0J (g(t)) dt = sup
g∈GM (ρ)
∫ T
0J (g(t)) dt
Ex: J (g1, . . . , gm) =∑
i gi, J (g1, . . . , gm) =∏
i gi,
Proof:Uniform BV bounds and Helly’s Compactness Theorem=⇒ convergence of subsequence of flux traces
Divergence Theorem on [−max |f ′(ρ)| · T, 0]× [0, T ]=⇒ convergence of flux traces of solutions to flux traceof limit solution
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
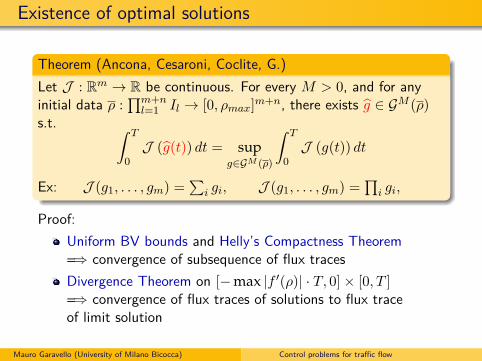
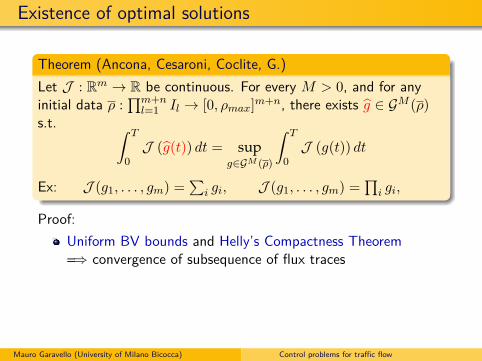
Existence of optimal solutions
Theorem (Ancona, Cesaroni, Coclite, G.)Let J : Rm → R be continuous. For every M > 0, and for anyinitial data ρ :
∏m+nl=1 Il → [0, ρmax]
m+n, there exists g ∈ GM (ρ)s.t. ∫ T
0J (g(t)) dt = sup
g∈GM (ρ)
∫ T
0J (g(t)) dt
Ex: J (g1, . . . , gm) =∑
i gi, J (g1, . . . , gm) =∏
i gi,
Proof:Uniform BV bounds and Helly’s Compactness Theorem=⇒ convergence of subsequence of flux tracesDivergence Theorem on [−max |f ′(ρ)| · T, 0]× [0, T ]=⇒ convergence of flux traces of solutions to flux traceof limit solution
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
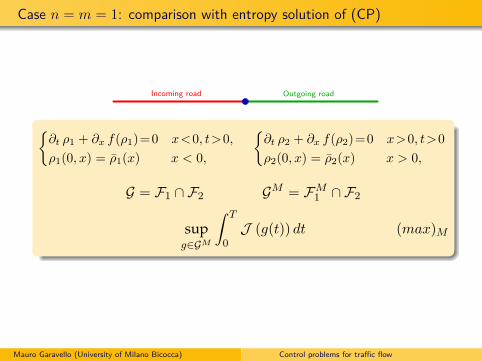
Case n = m = 1: comparison with entropy solution of (CP)
Incoming road Outgoing road
∂t ρ1 + ∂x f(ρ1)=0 x<0, t>0,
ρ1(0, x) = ρ1(x) x < 0,
∂t ρ2 + ∂x f(ρ2)=0 x>0, t>0
ρ2(0, x) = ρ2(x) x > 0,
G = F1 ∩ F2 GM = FM1 ∩ F2
supg∈GM
∫ T
0J (g(t)) dt (max)M
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
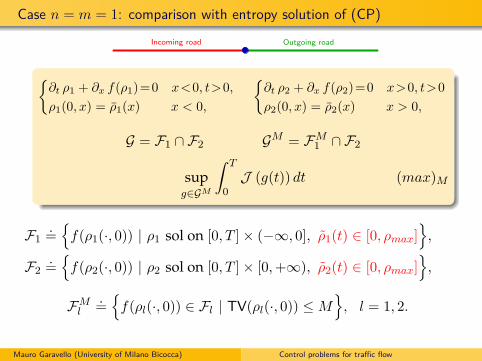
Case n = m = 1: comparison with entropy solution of (CP)Incoming road Outgoing road
∂t ρ1 + ∂x f(ρ1)=0 x<0, t>0,
ρ1(0, x) = ρ1(x) x < 0,
∂t ρ2 + ∂x f(ρ2)=0 x>0, t>0
ρ2(0, x) = ρ2(x) x > 0,
G = F1 ∩ F2 GM = FM1 ∩ F2
supg∈GM
∫ T
0J (g(t)) dt (max)M
F1.=f(ρ1(·, 0)) | ρ1 sol on [0, T ]× (−∞, 0], ρ1(t) ∈ [0, ρmax]
,
F2.=f(ρ2(·, 0)) | ρ2 sol on [0, T ]× [0,+∞), ρ2(t) ∈ [0, ρmax]
,
FMl
.=f(ρl(·, 0)) ∈ Fl | TV(ρl(·, 0)) ≤ M
, l = 1, 2.
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
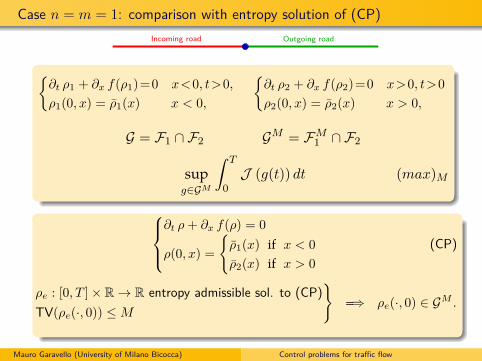
Case n = m = 1: comparison with entropy solution of (CP)Incoming road Outgoing road
∂t ρ1 + ∂x f(ρ1)=0 x<0, t>0,
ρ1(0, x) = ρ1(x) x < 0,
∂t ρ2 + ∂x f(ρ2)=0 x>0, t>0
ρ2(0, x) = ρ2(x) x > 0,
G = F1 ∩ F2 GM = FM1 ∩ F2
supg∈GM
∫ T
0J (g(t)) dt (max)M
∂t ρ+ ∂x f(ρ) = 0
ρ(0, x) =
ρ1(x) if x < 0
ρ2(x) if x > 0
(CP)
ρe : [0, T ]× R → R entropy admissible sol. to (CP)TV(ρe(·, 0)) ≤ M
=⇒ ρe(·, 0) ∈ GM .
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Case n = m = 1: comparison with entropy solution of (CP)
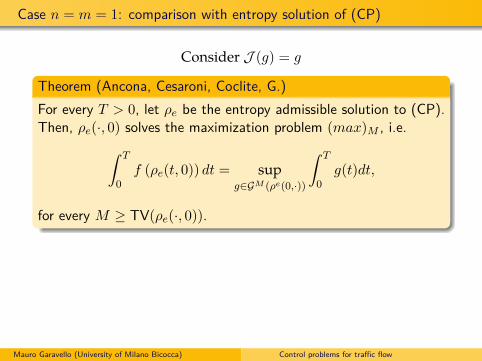
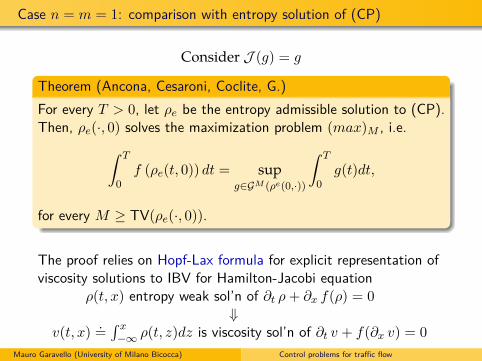
Consider J (g) = g
Theorem (Ancona, Cesaroni, Coclite, G.)For every T > 0, let ρe be the entropy admissible solution to (CP).Then, ρe(·, 0) solves the maximization problem (max)M , i.e.∫ T
0f (ρe(t, 0)) dt = sup
g∈GM (ρe(0,·))
∫ T
0g(t)dt,
for every M ≥ TV(ρe(·, 0)).
The proof relies on Hopf-Lax formula for explicit representation ofviscosity solutions to IBV for Hamilton-Jacobi equation
ρ(t, x) entropy weak sol’n of ∂t ρ+ ∂x f(ρ) = 0⇓
v(t, x).=∫ x−∞ ρ(t, z)dz is viscosity sol’n of ∂t v + f(∂x v) = 0
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Case n = m = 1: comparison with entropy solution of (CP)
Consider J (g) = g
Theorem (Ancona, Cesaroni, Coclite, G.)For every T > 0, let ρe be the entropy admissible solution to (CP).Then, ρe(·, 0) solves the maximization problem (max)M , i.e.∫ T
0f (ρe(t, 0)) dt = sup
g∈GM (ρe(0,·))
∫ T
0g(t)dt,
for every M ≥ TV(ρe(·, 0)).
The proof relies on Hopf-Lax formula for explicit representation ofviscosity solutions to IBV for Hamilton-Jacobi equation
ρ(t, x) entropy weak sol’n of ∂t ρ+ ∂x f(ρ) = 0⇓
v(t, x).=∫ x−∞ ρ(t, z)dz is viscosity sol’n of ∂t v + f(∂x v) = 0
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Case n = m = 1: comparison with entropy solution of (CP)
Consider J (g) = g
Theorem (Ancona, Cesaroni, Coclite, G.)For every T > 0, let ρe be the entropy admissible solution to (CP).Then, ρe(·, 0) solves the maximization problem (max)M , i.e.∫ T
0f (ρe(t, 0)) dt = sup
g∈GM (ρe(0,·))
∫ T
0g(t)dt,
for every M ≥ TV(ρe(·, 0)).
The proof relies on Hopf-Lax formula for explicit representation ofviscosity solutions to IBV for Hamilton-Jacobi equation
ρ(t, x) entropy weak sol’n of ∂t ρ+ ∂x f(ρ) = 0⇓
v(t, x).=∫ x−∞ ρ(t, z)dz is viscosity sol’n of ∂t v + f(∂x v) = 0
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
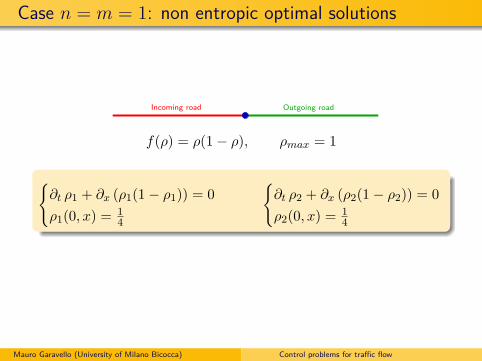
Case n = m = 1: non entropic optimal solutions
Incoming road Outgoing road
f(ρ) = ρ(1− ρ), ρmax = 1
∂t ρ1 + ∂x (ρ1(1− ρ1)) = 0
ρ1(0, x) =14
∂t ρ2 + ∂x (ρ2(1− ρ2)) = 0
ρ2(0, x) =14
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
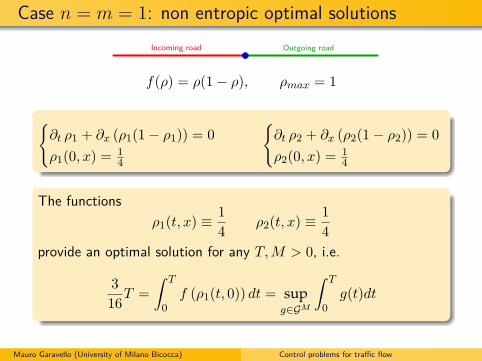
Case n = m = 1: non entropic optimal solutionsIncoming road Outgoing road
f(ρ) = ρ(1− ρ), ρmax = 1
∂t ρ1 + ∂x (ρ1(1− ρ1)) = 0
ρ1(0, x) =14
∂t ρ2 + ∂x (ρ2(1− ρ2)) = 0
ρ2(0, x) =14
The functionsρ1(t, x) ≡
1
4ρ2(t, x) ≡
1
4
provide an optimal solution for any T,M > 0, i.e.
3
16T =
∫ T
0f (ρ1(t, 0)) dt = sup
g∈GM
∫ T
0g(t)dt
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Case n = m = 1: non entropic optimal solutions
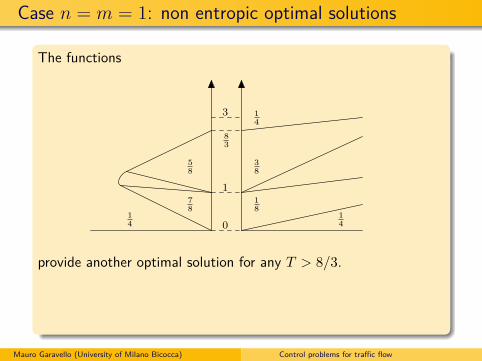
The functions
0
1
3
83
14
78
58
14
14
38
18
provide another optimal solution for any T > 8/3.
∫ T
0f (ρ(t, 0)) dt =
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Case n = m = 1: non entropic optimal solutions
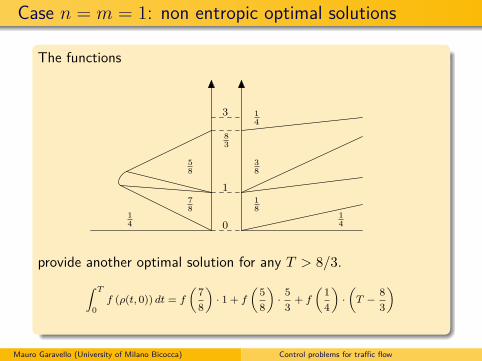
The functions
0
1
3
83
14
78
58
14
14
38
18
provide another optimal solution for any T > 8/3.∫ T
0f (ρ(t, 0)) dt = f
(7
8
)· 1 + f
(5
8
)·5
3+ f
(1
4
)·(T −
8
3
)
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Case n = m = 1: non entropic optimal solutions
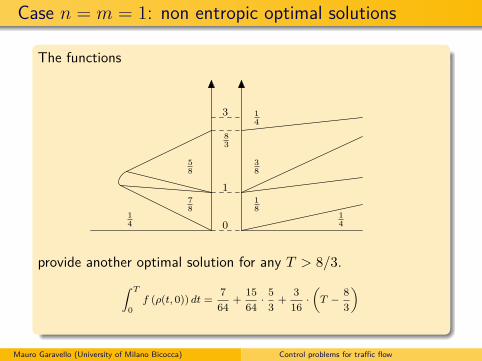
The functions
0
1
3
83
14
78
58
14
14
38
18
provide another optimal solution for any T > 8/3.∫ T
0f (ρ(t, 0)) dt =
7
64+
15
64·5
3+
3
16·(T −
8
3
)
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Case n = m = 1: non entropic optimal solutions
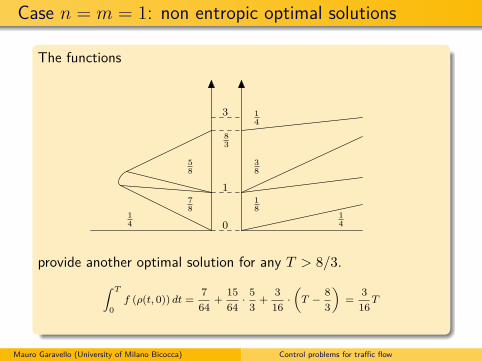
The functions
0
1
3
83
14
78
58
14
14
38
18
provide another optimal solution for any T > 8/3.∫ T
0f (ρ(t, 0)) dt =
7
64+
15
64·5
3+
3
16·(T −
8
3
)=
3
16T
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow

Optimization w.r.t. drivers’ preference parameters
Given:T,M > 0
initial data ρl : Il → [0, ρmax], l ∈ 1, . . . ,m+ na Markov matrix valued map t 7→ A(t), t ∈ [0, T ]
Admissible flux traces compatible with ρ.= (ρ1, . . . , ρm+n)
and satisfying constraints given by A:
GM
A(ρ) =
(g1, . . . , gm)∈
m∏i=1
FMi (ρi) :
m∑i=1
aji(t)gi(t) ∈ Fj(ρj),
for a.e. t∈ [0, T ], j=m+1, . . . ,m+n, TV(aij) ≤ M ∀i, j
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Optimization w.r.t. drivers’ preference parameters
Given:T,M > 0
initial data ρl : Il → [0, ρmax], l ∈ 1, . . . ,m+ n
a Markov matrix valued map t 7→ A(t), t ∈ [0, T ]
Admissible flux traces compatible with ρ.= (ρ1, . . . , ρm+n)
and satisfying constraints given by A:
GM
A(ρ) =
(g1, . . . , gm)∈
m∏i=1
FMi (ρi) :
m∑i=1
aji(t)gi(t) ∈ Fj(ρj),
for a.e. t∈ [0, T ], j=m+1, . . . ,m+n, TV(aij) ≤ M ∀i, j
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Optimization w.r.t. drivers’ preference parameters
Given:T,M > 0
initial data ρl : Il → [0, ρmax], l ∈ 1, . . . ,m+ na Markov matrix valued map t 7→ A(t), t ∈ [0, T ]
Admissible flux traces compatible with ρ.= (ρ1, . . . , ρm+n)
and satisfying constraints given by A:
GM
A(ρ) =
(g1, . . . , gm)∈
m∏i=1
FMi (ρi) :
m∑i=1
aji(t)gi(t) ∈ Fj(ρj),
for a.e. t∈ [0, T ], j=m+1, . . . ,m+n, TV(aij) ≤ M ∀i, j
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Optimization w.r.t. drivers’ preference parameters
Given:T,M > 0
initial data ρl : Il → [0, ρmax], l ∈ 1, . . . ,m+ na Markov matrix valued map t 7→ A(t), t ∈ [0, T ]
Consider:
Admissible flux traces compatible with ρ.= (ρ1, . . . , ρm+n)
and satisfying constraints given by A:
GM
A(ρ) =
(g1, . . . , gm)∈
m∏i=1
FMi (ρi) :
m∑i=1
aji(t)gi(t) ∈ Fj(ρj),
for a.e. t∈ [0, T ], j=m+1, . . . ,m+n, TV(aij) ≤ M ∀i, j
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Optimization w.r.t. drivers’ preference parameters
Given:T,M > 0
initial data ρl : Il → [0, ρmax], l ∈ 1, . . . ,m+ na Markov matrix valued map t 7→ A(t), t ∈ [0, T ]
Consider:
Admissible flux traces compatible with ρ.= (ρ1, . . . , ρm+n)
and satisfying constraints given by A:
GM
A(ρ) =
(g1, . . . , gm)∈
m∏i=1
FMi (ρi) :
m∑i=1
aji(t)gi(t) ∈ Fj(ρj),
for a.e. t∈ [0, T ], j=m+1, . . . ,m+n, TV(aij) ≤ M ∀i, j
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
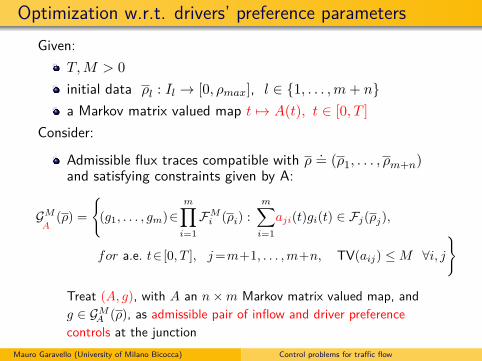
Optimization w.r.t. drivers’ preference parametersGiven:
T,M > 0
initial data ρl : Il → [0, ρmax], l ∈ 1, . . . ,m+ na Markov matrix valued map t 7→ A(t), t ∈ [0, T ]
Consider:
Admissible flux traces compatible with ρ.= (ρ1, . . . , ρm+n)
and satisfying constraints given by A:
GM
A(ρ) =
(g1, . . . , gm)∈
m∏i=1
FMi (ρi) :
m∑i=1
aji(t)gi(t) ∈ Fj(ρj),
for a.e. t∈ [0, T ], j=m+1, . . . ,m+n, TV(aij) ≤ M ∀i, j
Treat (A, g), with A an n×m Markov matrix valued map, andg ∈ GM
A (ρ), as admissible pair of inflow and driver preferencecontrols at the junction
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
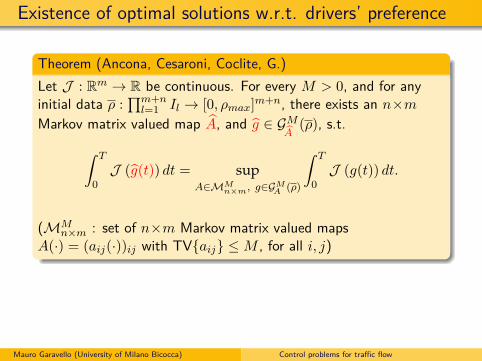
Existence of optimal solutions w.r.t. drivers’ preference
Theorem (Ancona, Cesaroni, Coclite, G.)Let J : Rm → R be continuous. For every M > 0, and for anyinitial data ρ :
∏m+nl=1 Il → [0, ρmax]
m+n, there exists an n×m
Markov matrix valued map A, and g ∈ GMA
(ρ), s.t.∫ T
0J (g(t)) dt = sup
A∈MMn×m, g∈GM
A (ρ)
∫ T
0J (g(t)) dt.
(MMn×m : set of n×m Markov matrix valued maps
A(·) = (aij(·))ij with TVaij ≤ M , for all i, j)
Proof:
Same arguments as for the optimal control problems with afixed distributional matrix A.
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
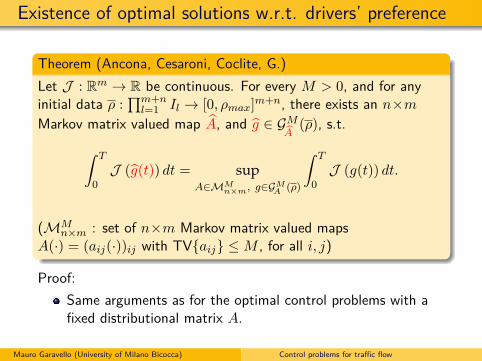
Existence of optimal solutions w.r.t. drivers’ preference
Theorem (Ancona, Cesaroni, Coclite, G.)Let J : Rm → R be continuous. For every M > 0, and for anyinitial data ρ :
∏m+nl=1 Il → [0, ρmax]
m+n, there exists an n×m
Markov matrix valued map A, and g ∈ GMA
(ρ), s.t.∫ T
0J (g(t)) dt = sup
A∈MMn×m, g∈GM
A (ρ)
∫ T
0J (g(t)) dt.
(MMn×m : set of n×m Markov matrix valued maps
A(·) = (aij(·))ij with TVaij ≤ M , for all i, j)
Proof:Same arguments as for the optimal control problems with afixed distributional matrix A.
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
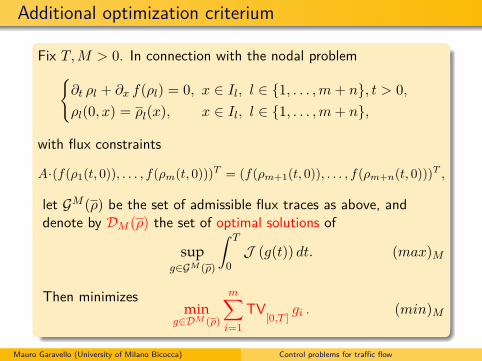
Additional optimization criterium
Fix T,M > 0. In connection with the nodal problem∂t ρl + ∂x f(ρl) = 0, x ∈ Il, l ∈ 1, . . . ,m+ n, t > 0,
ρl(0, x) = ρl(x), x ∈ Il, l ∈ 1, . . . ,m+ n,
with flux constraints
A·(f(ρ1(t, 0)), . . . , f(ρm(t, 0)))T = (f(ρm+1(t, 0)), . . . , f(ρm+n(t, 0)))T ,
let GM (ρ) be the set of admissible flux traces as above, anddenote by DM (ρ) the set of optimal solutions of
supg∈GM (ρ)
∫ T
0J (g(t)) dt. (max)M
Then minimizesmin
g∈DM (ρ)
m∑i=1
TV[0,T ]
gi . (min)M
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Additional optimization criterium: existence of solution
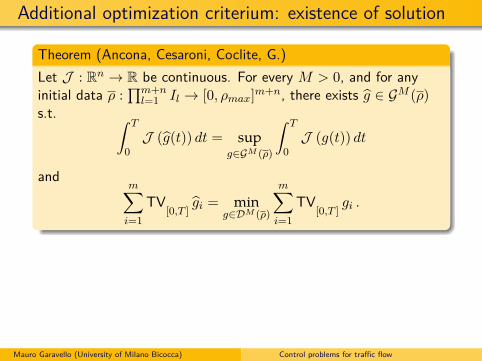
Theorem (Ancona, Cesaroni, Coclite, G.)Let J : Rn → R be continuous. For every M > 0, and for anyinitial data ρ :
∏m+nl=1 Il → [0, ρmax]
m+n, there exists g ∈ GM (ρ)s.t. ∫ T
0J (g(t)) dt = sup
g∈GM (ρ)
∫ T
0J (g(t)) dt
andm∑i=1
TV[0,T ]
gi = ming∈DM (ρ)
m∑i=1
TV[0,T ]
gi .
Notice: solutions of the min-max problems fulfills the requirementof maximize the total flux through the junction keeping theoscillation the smallest possibleThe proof relies on the compactness of the set GM with respect tothe L1-topology and the lower semicontinuity of the total variation
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Additional optimization criterium: existence of solution
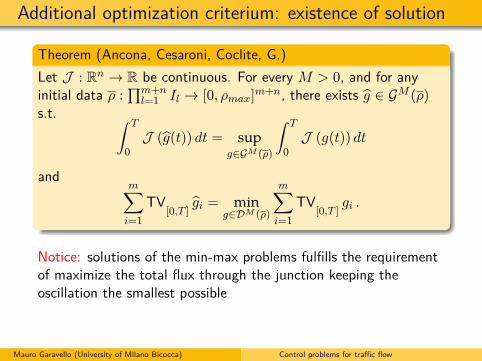
Theorem (Ancona, Cesaroni, Coclite, G.)Let J : Rn → R be continuous. For every M > 0, and for anyinitial data ρ :
∏m+nl=1 Il → [0, ρmax]
m+n, there exists g ∈ GM (ρ)s.t. ∫ T
0J (g(t)) dt = sup
g∈GM (ρ)
∫ T
0J (g(t)) dt
andm∑i=1
TV[0,T ]
gi = ming∈DM (ρ)
m∑i=1
TV[0,T ]
gi .
Notice: solutions of the min-max problems fulfills the requirementof maximize the total flux through the junction keeping theoscillation the smallest possible
The proof relies on the compactness of the set GM with respect tothe L1-topology and the lower semicontinuity of the total variation
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Additional optimization criterium: existence of solution
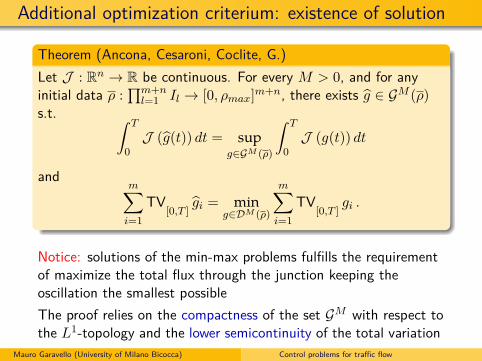
Theorem (Ancona, Cesaroni, Coclite, G.)Let J : Rn → R be continuous. For every M > 0, and for anyinitial data ρ :
∏m+nl=1 Il → [0, ρmax]
m+n, there exists g ∈ GM (ρ)s.t. ∫ T
0J (g(t)) dt = sup
g∈GM (ρ)
∫ T
0J (g(t)) dt
andm∑i=1
TV[0,T ]
gi = ming∈DM (ρ)
m∑i=1
TV[0,T ]
gi .
Notice: solutions of the min-max problems fulfills the requirementof maximize the total flux through the junction keeping theoscillation the smallest possibleThe proof relies on the compactness of the set GM with respect tothe L1-topology and the lower semicontinuity of the total variation
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
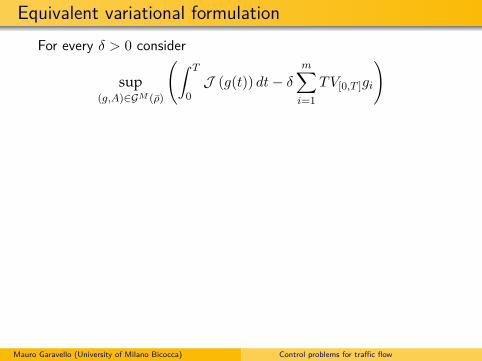
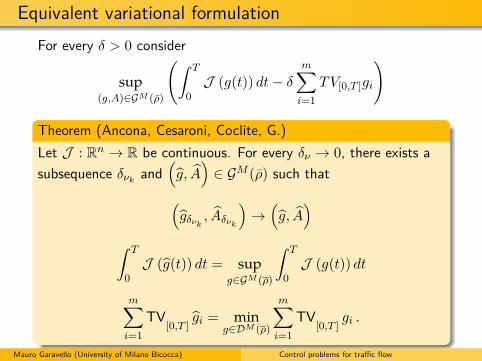
Equivalent variational formulationFor every δ > 0 consider
sup(g,A)∈GM (ρ)
(∫ T
0J (g(t)) dt− δ
m∑i=1
TV[0,T ]gi
)
Theorem (Ancona, Cesaroni, Coclite, G.)Let J : Rn → R be continuous. For every δν → 0, there exists asubsequence δνk and
(g, A
)∈ GM (ρ) such that(
gδνk , Aδνk
)→(g, A
)∫ T
0J (g(t)) dt = sup
g∈GM (ρ)
∫ T
0J (g(t)) dt
m∑i=1
TV[0,T ]
gi = ming∈DM (ρ)
m∑i=1
TV[0,T ]
gi .
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Equivalent variational formulationFor every δ > 0 consider
sup(g,A)∈GM (ρ)
(∫ T
0J (g(t)) dt− δ
m∑i=1
TV[0,T ]gi
)
Theorem (Ancona, Cesaroni, Coclite, G.)Let J : Rn → R be continuous. For every δν → 0, there exists asubsequence δνk and
(g, A
)∈ GM (ρ) such that(
gδνk , Aδνk
)→(g, A
)∫ T
0J (g(t)) dt = sup
g∈GM (ρ)
∫ T
0J (g(t)) dt
m∑i=1
TV[0,T ]
gi = ming∈DM (ρ)
m∑i=1
TV[0,T ]
gi .
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
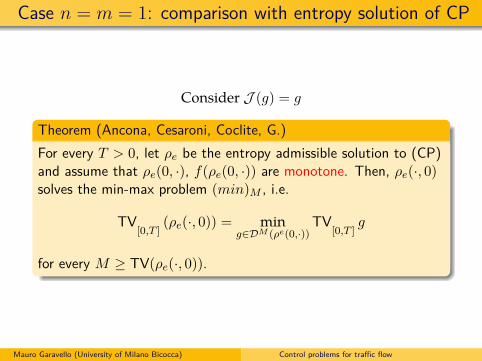
Case n = m = 1: comparison with entropy solution of CP
Consider J (g) = g
Theorem (Ancona, Cesaroni, Coclite, G.)For every T > 0, let ρe be the entropy admissible solution to (CP)and assume that ρe(0, ·), f(ρe(0, ·)) are monotone. Then, ρe(·, 0)solves the min-max problem (min)M , i.e.
TV[0,T ]
(ρe(·, 0)) = ming∈DM (ρe(0,·))
TV[0,T ]
g
for every M ≥ TV(ρe(·, 0)).
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Case n = m = 1: comparison with entropy solution of CP
Consider J (g) = g
Theorem (Ancona, Cesaroni, Coclite, G.)For every T > 0, let ρe be the entropy admissible solution to (CP)and assume that ρe(0, ·), f(ρe(0, ·)) are monotone. Then, ρe(·, 0)solves the min-max problem (min)M , i.e.
TV[0,T ]
(ρe(·, 0)) = ming∈DM (ρe(0,·))
TV[0,T ]
g
for every M ≥ TV(ρe(·, 0)).
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
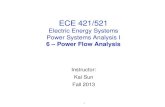
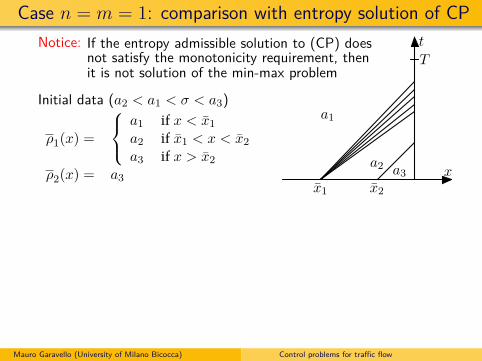
Case n = m = 1: comparison with entropy solution of CPNotice: If the entropy admissible solution to (CP) does
not satisfy the monotonicity requirement, thenit is not solution of the min-max problem
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Case n = m = 1: comparison with entropy solution of CPNotice: If the entropy admissible solution to (CP) does
not satisfy the monotonicity requirement, thenit is not solution of the min-max problem
Initial data (a2 < a1 < σ < a3)
ρ1(x) =
a1 if x < x1a2 if x1 < x < x2a3 if x > x2
ρ2(x) = a3
t
T
xx1 x2
a1
a2 a3
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
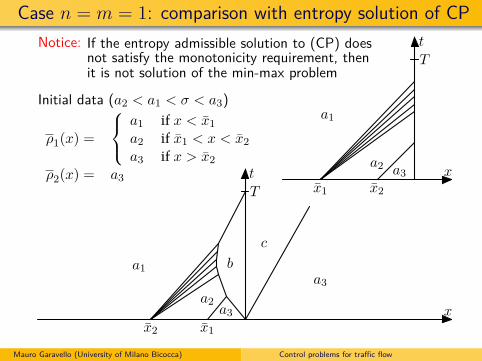
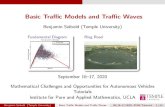
Case n = m = 1: comparison with entropy solution of CPNotice: If the entropy admissible solution to (CP) does
not satisfy the monotonicity requirement, thenit is not solution of the min-max problem
Initial data (a2 < a1 < σ < a3)
ρ1(x) =
a1 if x < x1a2 if x1 < x < x2a3 if x > x2
ρ2(x) = a3
t
T
xx1 x2
a1
a2 a3t
T
xx1x2
a1
a2a3
b
c
a3
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Prospective research directions
Analyze optimal solutions for 1× 2, 2× 1 and 2× 2 junctions
Analyze optimal solutions involving inflow junctions controlsat two (or more) nodes
Consider cost functionals depending on the whole value of thesolution on [0, T ] along the incoming roads (and not just onthe inflow on [0, T ] at the junction)
Consider feedback type optimal controls at junctions
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Prospective research directions
Analyze optimal solutions for 1× 2, 2× 1 and 2× 2 junctions
Analyze optimal solutions involving inflow junctions controlsat two (or more) nodes
Consider cost functionals depending on the whole value of thesolution on [0, T ] along the incoming roads (and not just onthe inflow on [0, T ] at the junction)
Consider feedback type optimal controls at junctions
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Prospective research directions
Analyze optimal solutions for 1× 2, 2× 1 and 2× 2 junctions
Analyze optimal solutions involving inflow junctions controlsat two (or more) nodes
Consider cost functionals depending on the whole value of thesolution on [0, T ] along the incoming roads (and not just onthe inflow on [0, T ] at the junction)
Consider feedback type optimal controls at junctions
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Prospective research directions
Analyze optimal solutions for 1× 2, 2× 1 and 2× 2 junctions
Analyze optimal solutions involving inflow junctions controlsat two (or more) nodes
Consider cost functionals depending on the whole value of thesolution on [0, T ] along the incoming roads (and not just onthe inflow on [0, T ] at the junction)
Consider feedback type optimal controls at junctions
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow
Thank you for your attention!
Mauro Garavello (University of Milano Bicocca) Control problems for traffic flow