QUATRO TEOREMAS DAS FUNC¸OES IMPL˜ ´ICITAS Teorema … · a identidade g ≡ h na...
22
MAT 147 - C ´ ALCULO II - FEA-USP 2 SEMESTRE de 2012 Professor Oswaldo Rio Branco de Oliveira QUATRO TEOREMAS DAS FUNC ¸ ˜ OES IMPL ´ ICITAS Nesta apresenta¸ c˜ao utilizaremos o teorema abaixo. Teorema do Valor M´ edio. Seja f ∶ Ω → R, com Ω um aberto em R 2 , uma fun¸c˜ao diferenci´avel. Consideremos dois pontos P e Q, ambos em Ω, tais que o segmento que os une, PQ, est´a contido em Ω. Ent˜ao, existe um ponto P ∈ PQ tal que f (Q)− f (P ) = → ∇ f ( P ) ⋅ (Q − P ). ´ E claro que h´a um resultado an´alogo ao acima se Ω´ e um aberto de R 3 . O TEOREMA FUNDAMENTAL DAS FUNC ¸ ˜ OES IMPL ´ ICITAS Motiva¸c˜ ao. Seja f ∶ Ω → R uma fun¸c˜ao definida em um aberto Ω ⊂ R 2 . Ob- jetivamos encontrar condi¸ c˜oes em que dada a equa¸ c˜ao f (x, y ) = 0 podemos explicitar y comofun¸c˜aodavari´avel x, x em algum intervalo aberto. Isto ´ e, determinarmosumafun¸c˜ao y = g (x) tal que f (x, g (x)) = 0 para todo ponto x ∈ Dom(g ) = (a, b) ⊂ R, onde a ≠ b. Ainda mais, assegurada a existˆ encia de umatalfun¸c˜ao g desejamos identificar sob quais hip´ oteses podemos con- cluir, para g , sua unicidade ou continuidade ou diferenciabilidade. Defini¸ c˜ ao. Umafun¸c˜ao y = g (x) se diz definida (dada) implicitamente pela equa¸ c˜ao f (x, y ) = 0 se f (x, g (x)) = 0, para todo x ∈ Dom(g ). Diz-se tamb´ em que y = g (x) ´ e solu¸c˜ ao impl´ ıcita da equa¸ c˜ao f (x, y ) = 0. Analogamente definimossolu¸c˜oesimpl´ ıcitas x = h(y ) . Nota¸c˜ ao. Para diferenciar ponto de vetor, por vezes indicamos um vetor → v = (a, b) ∈ R 2 por → v = ⟨a, b⟩.
-
Upload
truongtram -
Category
Documents
-
view
224 -
download
0
Transcript of QUATRO TEOREMAS DAS FUNC¸OES IMPL˜ ´ICITAS Teorema … · a identidade g ≡ h na...
MAT 147 - CALCULO II - FEA-USP
2º SEMESTRE de 2012
Professor Oswaldo Rio Branco de Oliveira
QUATRO TEOREMAS DAS FUNCOES IMPLICITAS
Nesta apresentacao utilizaremos o teorema abaixo.
Teorema do Valor Medio. Seja f ∶ Ω Ð→ R, com Ω um aberto em R2,
uma funcao diferenciavel. Consideremos dois pontos P e Q, ambos em Ω,
tais que o segmento que os une, PQ, esta contido em Ω. Entao, existe um
ponto P ∈ PQ tal que
f(Q) − f(P ) = Ð→∇f(P ) ⋅ (Q −P ).
E claro que ha um resultado analogo ao acima se Ω e um aberto de R3.
O TEOREMA FUNDAMENTAL DAS FUNCOES IMPLICITAS
Motivacao. Seja f ∶ Ω→ R uma funcao definida em um aberto Ω ⊂ R2. Ob-
jetivamos encontrar condicoes em que dada a equacao f(x, y) = 0 podemos
explicitar y como funcao da variavel x, x em algum intervalo aberto. Isto e,
determinarmos uma funcao y = g(x) tal que f(x, g(x)) = 0 para todo ponto
x ∈ Dom(g) = (a, b) ⊂ R, onde a ≠ b. Ainda mais, assegurada a existencia de
uma tal funcao g desejamos identificar sob quais hipoteses podemos con-
cluir, para g, sua unicidade ou continuidade ou diferenciabilidade.
Definicao. Uma funcao y = g(x) se diz definida (dada) implicitamente pela
equacao f(x, y) = 0 se f(x, g(x)) = 0, para todo x ∈ Dom(g). Diz-se tambem
que y = g(x) e solucao implıcita da equacao f(x, y) = 0. Analogamente
definimos solucoes implıcitas x = h(y) .Notacao. Para diferenciar ponto de vetor, por vezes indicamos um vetorÐ→v = (a, b) ∈ R2 por Ð→v = ⟨a, b⟩.

Exemplo 1. A analise da equacao x2 + y2 − 1 = 0, neste caso f(x, y) =x2 + y2 − 1, e elucidativa. A equacao x2 + y2 = 1 define a circunferencia no
plano, de raio 1 e centrada na origem, usualmente indicada por S1.
Claramente, as funcoes g1(x) = +√1 − x2, onde x ∈ (−1,+1), e g2(x) =
−√1 − x2, onde x ∈ (−1,+1), sao solucoes implıcitas da equacao x2+y2−1 = 0.
Os graficos de g1 e g2 sao, respectivamente, o “hemisferio” superior
H+ = (x, y) ∶ x2+ y2 = 1 e y ≥ 0,
e o “hemisferio” inferior
H− = (x, y) ∶ x2+ y2 = 1 e y ≤ 0,
de S1, subtraıdos de ambos os pontos (−1,0) e (1,0).
x
y
x 1−1
g1(x) = +√1 − x2
g2(x) = −√1 − x2
Figura 1: Solucoes implicıtas da equacao x2 + y2 = 1, se x ∈ (−1,+1)
Se (x0, y0) ∈ H+ e y0 > 0, entao a funcao g1(x) = +√1 − x2 com x ∈ (−1,+1)
e, entre as solucoes da equacao x2 + y2 = 1, uma solucao tal que g1(x0) = y0.Analogamente, se (x0, y0) ∈ H− e y0 < 0, entao a funcao g2(x) = −
√1 − x2
onde x ∈ (−1,1), e solucao de f(x, y) = 0 tal que g2(x0) = y0. Vide Figura 1.
Logo, se (x0, y0) ∈ S1 e tal que y0 < 0 ou y0 > 0 determinamos uma funcao
2

y = g(x) definida em um intervalo I, aberto e contendo x0, tal que
⎧⎪⎪⎨⎪⎪⎩f(x, g(x)) = 0 , para todo x ∈ I , onde x0 ∈ I ,g(x0) = y0.
Neste caso temos I = (−1,1). Porem, todo intervalo (x0 − r, x0 + r), r > 0,contido em (−1,1) serve.
Se (x0, y0) = (1,0) ∈ S1, observando o desenho da circunferencia, proximo
ao ponto (1,0), e obvio que nao podemos encontrar um intervalo aberto
centrado em x0 = 1, I = (1−r,1+r), r > 0, e uma funcao g ∶ (1−r,1+r) → R,
tal que x2+g(x)2 = 1 para todo x ∈ (1−r,1+r). Neste caso, tal g nao existe
ainda que descontınua. Vide Figura 2 que segue.
x
yÐ→∇f(0, 1)
Ð→∇f(1, 0)Ð→∇f
Ð→∇fx = −1x = 1
y = −1
y = 1
Figura 2: Analise das solucoes da equacao x2 + y2 = 1 nos pontos (±1,0) e (0,±1)
A circunferencia S1 e a curva de nıvel zero de f = f(x, y), donde o gradienteÐ→∇f = ⟨2x,2y⟩ e ortogonal ao S1 em cada ponto.
Atencao. A reta tangente [T ] a curva de nıvel zero, no ponto (1,0), e“vertical” pois paralela ao eixo Oy [prenuncio de dificuldades para determi-
narmos y = g(x)] e Ð→∇f(1,0) e paralelo ao eixo x [indicando que neste caso
a reta tangente T e paralela a Oy].
3

Analogamente, se (x0, y0) = (−1,0) entao nao existe intervalo I, aberto e
contendo x0 = −1, e g ∶ I → R, tal que x2 + g(x)2 = 1, ∀x ∈ I, e g(−1) = 0.Ainda, a reta tangente a curva de nıvel zero, no ponto (−1,0), e paralela
ao eixo Oy e o vetorÐ→∇f(−1,0) e paralelo a Ox (vide Figura 2).
A analise e analoga se procurarmos solucoes implicıtas da equacao
x2+ y2 − 1 = 0 ,
da forma x = h(y) tais que x0 = h(y0) e x20+ y2
0= 1 e, neste caso, se x0 = 0,
nos pontos (0,−1) e (0,+1) nao podemos determinar uma funcao x = h(y),onde y ∈ I, sendo I um intervalo aberto centrado em y0 = −1 (ou y0 = +1),tal que h(y)2 + y2 = 1, para todo y ∈ I, e h(y0) = 0 (vide Figura 2).
Atencao. As retas tangentes a curva de nıvel zero, em (0,−1) e em (0,+1),sao “horizontais” pois paralelas ao eixo Ox e
Ð→∇f e paralelo ao eixo Oy ∎
Mostramos a seguir que se f ∈ C1 e o vetor gradienteÐ→∇f(x0, y0) nao e
paralelo ao eixo Ox [donde segue que a reta tangente, se existir, a curva de
nıvel de f passando pelo ponto (x0, y0) nao e paralela ao eixo Oy], podemos
entao determinar uma funcao y = g(x) definida em um intervalo aberto I
contendo o ponto x0 tal que
f(x, g(x)) = 0 ,∀x ∈ I , e g(x0) = y0.
Teorema 1. Seja f = f(x, y) ∈ C1(Ω;R), com Ω um aberto nao vazio em
R2, e P0 = (x0, y0) um ponto em Ω tal que f(x0, y0) = 0. Nestas condicoes,se ∂f
∂y(x0, y0) ≠ 0, entao existem intervalos abertos I e J , contidos em R,
com x0 ∈ I e y0 ∈ J , satisfazendo:
Para cada x ∈ I existe um unico y = g(x) ∈ J , tal que f(x, g(x)) = 0. A funcao g ∶ I → J e diferenciavel, de classe C1, e
g′(x) = −∂f
∂x(x, g(x))
∂f
∂y(x, g(x)) .
4
Previamente a prova deste teorema e util uma serie de observacoes:
(1) O nome do teorema evidentemente se deve ao fato de podermos, teoricamente,
determinar localmente a variavel y em funcao da variavel x.
(2) Como estamos interessados em resolver f(x, y) = 0 localmente, pode-
mos supor que Ω e uma bola aberta (ou retangulo aberto) centrada em
(x0, y0) suficientemente pequena tal que ∂f
∂y(x, y) ≠ 0, ∀(x, y) ∈ Ω; e
portanto, a derivada parcial ∂f
∂ynao troca de sinal em Ω. Suponhamos
entao, sem perda de generalidade, ∂f
∂y> 0 em um tal domınio Ω.
(3) Retangulos e bolas sao conjuntos convexos [um conjunto e convexo se
contem todo segmento unindo dois pontos quaisquer do conjunto].
(4) A unicidade da funcao g(x) e trivial. De fato, se f(x, y1) = f(x, y2),com (x, y1) e (x, y2) em Ω, ∂f
∂y> 0 e Ω convexo, e facil ver que y1 = y2.
(5) Pela observacao (4), se g ∶ Dom(g) → R e h ∶ Dom(h) → R satisfazem
f(x, g(x)) = f(x,h(x)) , com x ∈ Dom(g) ∩Dom(h) ,
entao temos g(x) = h(x), para todo x ∈ Dom(g)∩Dom(h). Isto e, vale
a identidade g ≡ h na interseccao de domınios Dom(g) ∩Dom(h).(6) Pela observacao (5) [e com a notacao no enunciado do Teorema 1] segue
que para concluirmos a diferenciabilidade de g sobre todo o intervalo
I e suficiente provarmos a Afirmacao:
“para todo (x0, y0) ∈ Ω, existe uma funcao g ∶ I → J satisfazendo as
seguintes condicoes: f(x, g(x)) = 0, y0 = g(x0) e g derivavel em x0.”
Verificacao. De fato, dado x1 arbitrario no intervalo aberto I, pela
Afirmacao sabemos que existe uma funcao h definida em um intervalo
aberto I1 centrado em x1 tal que f(x,h(x)) = 0,∀x ∈ I1, com h de-
rivavel em x1. Entretanto, como x1 ∈ I ∩ I1, o qual e um intervalo
aberto, e g ≡ h em I ∩ I1, concluımos que g e derivavel em x1, ∀x1 ∈ I.
5

(7) Tendo provado que g e diferenciavel, a formula apresentada para a de-
rivada de g segue diretamente da regra da cadeia aplicada ao computo:
0 = d(0)dx= d
dxf(x, g(x)) = ∂f
∂x(x, g(x)) + ∂f
∂y(x, g(x)) ⋅ g′(x) .
(8) Utilizando a notacao apresentada no enunciado do teorema, temos que
a curva γ ∶ I → I × J ⊂ Ω, γ(x) = (x, g(x)), e tal que
f(γ(x)) = 0, ∀x ∈ I.
Logo, γ e uma curva de nıvel zero de f , satisfazendo ainda as tres
seguintes condicoes:
(i) γ e diferenciavel.
(ii) γ′(x) = ⟨1, g′(x)⟩ ≠Ð→0 , ∀x ∈ I.(iii)
Ð→∇f(γ(x)) ⋅ γ′(x) = 0, ∀x ∈ I, donde Ð→∇f(γ(x)) ⊥ γ′(x), ∀x ∈ I.
Dizemos que γ e uma parametrizacao local, passando pelo ponto (x0, y0),da curva L de nıvel zero de f = f(x, y). Por meio de uma translacao
podemos supor a curva γ definida em um intervalo aberto I = (−δ, δ),δ > 0, tal que γ(t) ∈ L e f(γ(t)) = 0 se t ∈ I = (−δ, δ), e ainda
mais, γ(0) = P0 e γ′(0) ≠ Ð→0 . Tal formulacao serve tanto no caso∂f
∂x(x0, y0) ≠ 0 como no caso ∂f
∂y(x0, y0) ≠ 0.
(9) Com as notacoes e a simplificacao do ıtem (8), por (8)(iii) segue que o
vetor gradienteÐ→∇f(γ(t)) e ortogonal a curva γ e assim ao grafico de
g. Logo, o vetorÐ→∇f(γ(0)) e normal ao grafico de g no ponto (x0, y0).
(10) Tendo provado que a funcao g e diferenciavel e a formula para a deri-
vada de g, como as derivadas parciais de f sao contınuas, concluımos
que a funcao g′ e tambem contınua. Consequentemente, g ∈ C1.
Demonstracao do Teorema.
Existencia.
Sendo f ∈ C1, temos que existe uma bola B = B((x0, y0); δ), δ > 0, tal
que ∂f
∂y> 0 em B. Sejam y1 e y2 tais que y1 < y0 < y2, com (x0, y1) ∈ B e
(x0, y2) ∈ B. Seja J = [y1, y2] contido no eixo das ordenadas (v. Figura 3).
6

y
y0y1
y1
y2
y2
x0
I
J
y = g(x)
Figura 3: Teorema 1 das Funcoes Implıcitas
Considerando a funcao [y1, y2] ∋ y ↦ f(x0, y) temos que esta e estritamente
crescente e f(x0, y0) = 0. Logo, f(x0, y1) < 0 e f(x0, y2) > 0. Consequente-
mente, pela continuidade da funcao f , existe um intervalo aberto I, con-
tendo x0, tal que ∀x ∈ I temos f(x, y1) < 0 e f(x, y2) > 0. Portanto, fixadox ∈ I, a funcao [y1, y2] ∋ y ↦ f(x, y) e tal que f(x, y1) < 0 e f(x, y2) > 0.Donde, pelo Teorema do Valor Intermediario segue que existe um unico y,
onde y = g(x) ∈ (y1, y2), tal que f(x, g(x)) = 0. Observemos que o retangulo
I × J esta contido na bola B.
Continuidade no ponto x0.
Sejam y1 e y2 como acima e sejam y1 e y2 tais que y1 < y1 < y0 < y2 < y2.Procedendo como acima encontramos um intervalo aberto I1 centrado em
x0 e contido em I, tal que:
se x ∈ I1 entao g(x) ∈ (y1, y2).Logo, g e contınua no ponto x0.
7

Diferenciabilidade no ponto x0.
Suponhamos ∆x ≠ 0 e pequeno o suficiente tal que x0 +∆x ∈ I. Considere-mos os pontos P0 = (x0, y0) = (x0, g(x0)) e P = (x0+∆x, g(x0+∆x)), ambos
no convexo I × J ⊂ B. Aplicando o Teorema do Valor Medio a funcao f
restrita ao segmento P0P vemos que existe um ponto (x, y) ∈ P0P tal que
0 = f((x0 +∆x, g(x0 +∆x)) − f(x0, g(x0)) == ∂f
∂x(x, y)∆x + ∂f
∂y(x, y)[g(x0 +∆x) − g(x0)].
Donde, como as derivadas parciais fx e fy sao contınuas, com fy ≠ 0 em B,
e a funcao g e contınua em x0 e, ainda, (x, y) ∆x→0ÐÐÐ→ P0 = (x0, y0), segue queg(x0 +∆x) − g(x0)
∆x= −
∂f
∂x(x, y)
∂f
∂y(x, y)
∆xÐ→0ÐÐÐÐ→ −∂f
∂x(x0, y0)
∂f
∂y(x0, y0) ∎
Exemplo 2. Determine pontos (x0, y0) ∈ R2 tais que em um intervalo em
torno de x0 existe solucao implıcita y = y(x) da equacao y3 + 3xy + x3 = 4.Compute entao y′(x0).Resolucao. Seja f(x, y) = y3 + 3xy + x3 − 4, onde (x, y) ∈ R2.
Se f(x0, y0) = 0 e fy(x0, y0) = 3y20+ 3x0 = 3(y2
0+ x0) ≠ 0, pelo Teorema 1
existe y = g(x), definida em um intervalo em torno de x0, tal que
f(x, g(x)) = g(x)3 + 3xg(x) + x3− 4 = 0 e g(x0) = y0.
Como f e C1, pelo Teorema 1, g e derivavel e pelas regras usuais de de-
rivacao segue que 3g(x0)2g′(x0) + 3g(x0) + 3x0g′(x0) + 3x20= 0. Logo,
dy
dx(x0) = g′(x0) = − g(x0) + x2
0
g(x0)2 + x0
= −x20+ y0
x0 + y20
∎
Destaquemos que sob as hipoteses do Teorema 1 asseguramos (localmente):
a existencia, a unicidade e a diferenciabilidade
da solucao y = g(x) do problema
f(x, y) = 0 e f(x0, y0) = 0.Se ∂f
∂y(x0, y0) = 0, nada podemos afirmar sobre ou a existencia ou a unicidade
ou a diferenciabilidade de uma solucao g para o referido problema.
O exemplo abaixo mostra que se ∂f
∂y(x0, y0) = 0 entao nao podemos a priori
supor a nao existencia de uma solucao diferenciavel para o citado problema.
8

Exemplo 3. Seja f(x, y) = x3 − y3, (x, y) ∈ R2.
(a) Descreva a curva de nıvel zero de f e mostre queÐ→∇f(0,0) = ⟨0,0⟩.
(b) De uma solucao implıcita e diferenciavel y = g(x) de f(x, y) = 0 tal
que g(0) = 0.Resolucao.
(a) Obviamente, x3 − y3 = 0⇔ x = y e, a curva de nıvel zero e a bissetriz
principal. E evidente que o gradiente e nulo em (0,0).(b) A funcao g(x) = x e difererenciavel e atende os requisitos ∎
O exemplo abaixo, mostra que se ∂f
∂y(x0, y0) = 0 e y = g(x) e uma solucao
contınua para f(x, y) = 0, por (x0, y0), pode ocorrer que g nao e diferenciavel.Exemplo 4. Seja f(x, y) = x − y3, para todo (x, y) ∈ R2.
(a) Descreva a curva de nıvel zero de f e mostre que fy(0,0) = 0.(b) De uma solucao implicıta e contınua y = g(x), de f(x, y) = 0, tal que
g(0) = 0.(c) Verifique que g nao e derivavel.
Solucao.
y
x
y = 3√x
y = 3√x
y = x3
Figura 4: Solucoes implicıtas da equacao x − y3 = 0
(a) Temos f(x, y) = 0 se e somente se x − y3 = 0, isto e, y = 3√x. A curva
de nıvel zero e o grafico da funcao raız cubica, a qual e a inversa da
funcao cubica: y = x3, cujo grafico e elementar. O grafico de y = 3√x e
9

entao simetrico ao grafico de y = x3 em relacao a bissetriz principal do
plano [esboce-o]. Obviamente, fy(x, y) = −3y2 e fy(0,0) = 0.(b) e (c) Se g(x) = 3
√x, temos que f(x, g(x)) = x − g(x)3 = 0, g(0) = 0, g e
contınua e, e facil ver, nao existe dg
dx(0) ∎
Mostremos agora que se ∂f
∂y(x0, y0) = 0 entao pode ocorrer a nao unicidade da
solucao implicıta diferenciavel y = g(x) para f(x, y) = 0, pelo ponto (x0, y0).Exemplo 5. Seja f(x, y) = x2 − y2,(x, y) ∈ R2.
(a) Descreva a curva de nıvel zero de f e mostre queÐ→∇f(0,0) = ⟨0,0⟩.
(b) De duas solucoes implicıtas diferenciaveis y = g(x) de f(x, y) = 0, peloponto (0,0).
Resolucao.
x
y
x2 − y2 = 0y = x (bissetriz principal)y = −x (bissetriz secundaria)
Figura 5: Solucoes implicıtas da equacao x2 − y2 = 0
(a) A curva de nıvel zero e o conjunto (x,±x) ∶ x ∈ R, uniao das bisse-
trizes principal e secundaria do plano. E evidente que
Ð→∇f(0,0) =Ð→0 ∈ R2.
(b) E claro que g1(x) = x e g2(x) = −x sao ambas solucoes implicıtas
diferenciaveis pela origem (0,0) ∎
10

Exemplo 6. Suponhamos que a funcao z = g(x, y), (x, y) ∈ Dom(g), comDom(g) um aberto de R2, dada implicitamente pela equacao F (x, y, z) = 0,e diferenciavel em Dom(g), sendo F diferenciavel num aberto Ω ⊂ R3 e
∂F
∂z(x, y, g(x, y)) ≠ 0 , ∀(x, y) ∈ Dom(g).
(a) Mostre que
∂g
∂x(x, y) = − ∂F
∂x(x,y,g(x,y))
∂F∂z(x,y,g(x,y)) e ∂g
∂y(x, y) = − ∂F
∂y(x,y,g(x,y))
∂F∂z(x,y,g(x,y)) .
(b) Observando que o grafico de g esta contido na superfıcie de nıvel 0
de F , mostre que o gradiente de F no ponto Po = (x0, y0, g(x0, y0)) eortogonal ao plano tangente ao grafico de g no ponto P0.
Solucao.
(a) Pela regra da cadeia, para pontos (x, y) ∈ Dom(g) temos as equacoes
0 = ∂∂x[F (x, y, g(x, y))] = ∂F
∂x.1 + ∂F
∂y.0 + ∂F
∂z
∂g
∂x
= ∂F∂x(x, y, g(x, y)) + ∂F
∂z(x, y, g(x, y)) ∂g
∂x(x, y)
e0 = ∂
∂y[F (x, y, g(x, y))] = ∂F
∂y.0 + ∂F
∂y.1 + ∂F
∂z
∂g
∂y
= ∂F∂y(x, y, g(x, y)) + ∂F
∂z(x, y, g(x, y))∂g
∂y(x, y) ,
as quais fornecem, ja que ∂F∂z(x, y, g(x, y)) ≠ 0, as formulas em (a).
(b) O plano π, tangente ao grafico de g no ponto P0 = (x0, y0, g(x0, y0))tem sua direcao dada pelo vetor normal
Ð→n P0= ⟨gx(x0, y0) , gy(x0, y0) ,−1⟩
e, devido a hipotese ∂F∂z(P0) ≠ 0, o plano π tem tambem a direcao
∂F∂z(P0)Ð→n P0
= ⟨∂F∂z(P0) ∂g∂x(x0, y0) , ∂F∂z (P0)∂g∂y(x0, y0) ,−∂F
∂z(P0)⟩ .
Finalmente, pelo item (a) temos o par de equacoes
∂F∂z(P0) ∂g∂x(x0, y0) = −∂F
∂x(P0) e ∂F
∂z(P0)∂g∂y (x0, y0) = −∂F
∂y(P0),
e consequentemente
∂F∂z(P0)Ð→n P0
= ⟨−∂F∂x(P0) ,−∂F
∂y(P0) ,−∂F
∂z(P0)⟩ = −Ð→∇F (P0) ∎
11

SEGUNDA VERSAO DO TEOREMA DA FUNCAO IMPLICITA
Teorema 2. Sejam F (x, y, z) uma funcao de classe C1 no aberto Ω ⊂ R3
e um ponto P0 = (x0, y0, z0) ∈ Ω, com F (x0, y0, z0) = 0. Nestas condicoes,
se ∂F∂z(x0, y0, z0) ≠ 0, entao existirao um retangulo aberto I × J centrado
no ponto (x0, y0) e um intervalo aberto V , com z0 ∈ V , tais que para cada
(x, y) ∈ I × J existe um unico numero g(x, y) ∈ V satisfazendo
F (x, y, g(x, y)) = 0.A funcao z = g(x, y), com (x, y) ∈ I × J , e diferenciavel, de classe C1, e:
∂g
∂x(x, y) = −
∂F∂x(x, y, g(x, y))
∂F∂z(x, y, g(x, y)) e
∂g
∂y(x, y) = −
∂F∂y(x, y, g(x, y))
∂F∂z(x, y, g(x, y)) .
Antes de iniciarmos a prova deste teorema tecamos duas observacoes:
(1) Utilizemos as notacoes Fx, Fy e Fz para ∂F∂x,∂F∂y
e ∂F∂z, respectivamente.
(2) Como no Teorema 1, supondo Ω convexo e pequeno o suficiente tal
que Fz > 0 em Ω, vale a unicidade: F (x, y, z1) = F (x, y, z2)⇒ z1 = z2.
Demonstracao do Teorema.
Existencia.
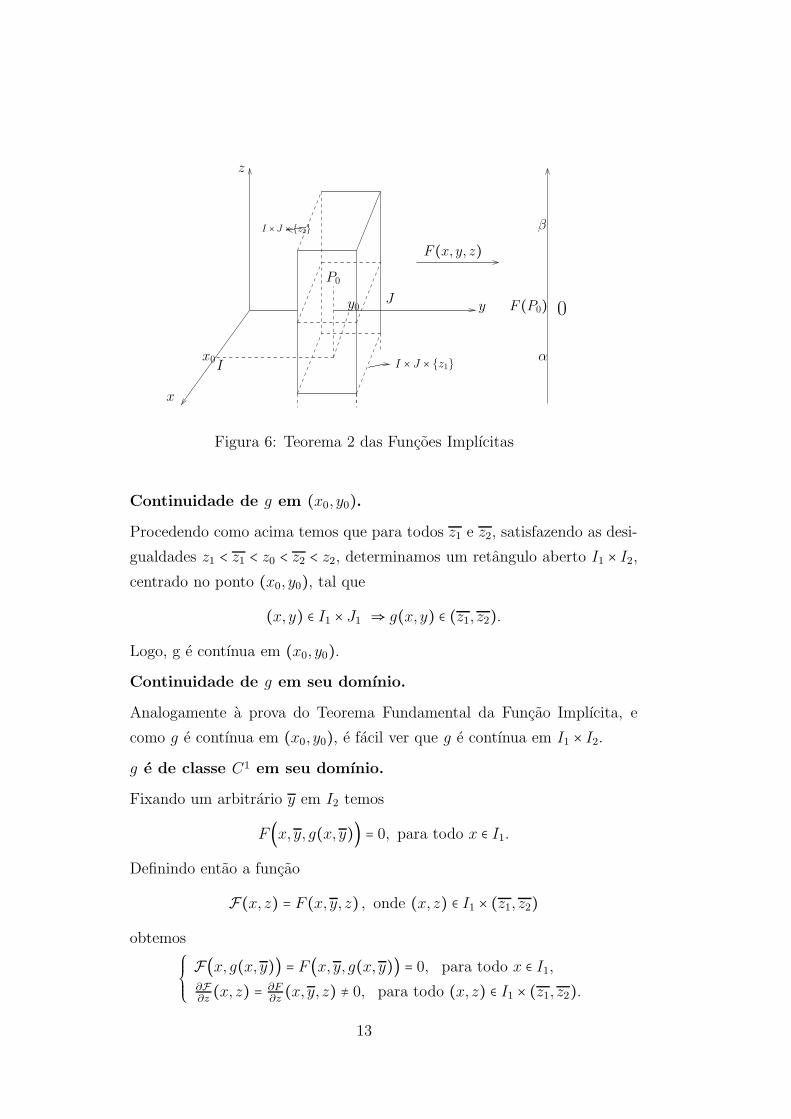
Consideremos (v. Figura 6 abaixo) um paralelepıpedo (convexo) aberto
I ×J × (z1, z2), centrado em (x0, y0, z0), pequeno o suficiente tal que seu fe-
cho esteja contido em Ω. Visto que temos Fz > 0, seguem as desigualdades
F (x0, y0, z1) < 0 = F (x0, y0, z0) < F (x0, y0, z2). Assim, devido a continui-
dade de F , podemos supor, sem perda de generalidade, que I e J sao sufici-
entemente pequenos tais que a restricao de F a I ×J × z1 e estritamente
negativa e a restricao de F a I × J × z2 e estritamente positiva.
Fixando agora (x, y) ∈ I × J e considerando a funcao ϕ(z) = F (x, y, z),com z ∈ [z1, z2], temos que ϕ e contınua, estritamente crescente (pois tem
derivada estritamente positiva), e ainda mais ϕ(z1) < 0 e ϕ(z2) > 0. Logo,
existe um unico z = g(x, y) ∈ (z1, z2) tal que ϕ(g(x, y)) = F (x, y, g(x, y)) = 0.Seja entao g assim definida, g ∶ I × J ↦ (z1, z2).
12
F (x, y, z)
F (P0) 0
I × J × z1
J
P0
y0
x0
I × J × z2
α
β
I
x
z
y
Figura 6: Teorema 2 das Funcoes Implıcitas
Continuidade de g em (x0, y0).Procedendo como acima temos que para todos z1 e z2, satisfazendo as desi-
gualdades z1 < z1 < z0 < z2 < z2, determinamos um retangulo aberto I1 × I2,
centrado no ponto (x0, y0), tal que(x, y) ∈ I1 × J1 ⇒ g(x, y) ∈ (z1, z2).
Logo, g e contınua em (x0, y0).Continuidade de g em seu domınio.
Analogamente a prova do Teorema Fundamental da Funcao Implıcita, e
como g e contınua em (x0, y0), e facil ver que g e contınua em I1 × I2.
g e de classe C1 em seu domınio.
Fixando um arbitrario y em I2 temos
F(x, y, g(x, y)) = 0, para todo x ∈ I1.
Definindo entao a funcao
F(x, z) = F (x, y, z) , onde (x, z) ∈ I1 × (z1, z2)obtemos
⎧⎪⎪⎨⎪⎪⎩F(x, g(x, y)) = F (x, y, g(x, y)) = 0, para todo x ∈ I1,∂F∂z(x, z) = ∂F
∂z(x, y, z) ≠ 0, para todo (x, z) ∈ I1 × (z1, z2).
13

Aplicando o Teorema Fundamental das Funcoes Implıcitas a funcao F ve-
mos que a funcao x↦ g(x, y) e derivavel em todo ponto x ∈ I1 e
∂g
∂x(x, y) = −
∂F∂x(x, g(x, y))
∂F∂z(x, g(x, y)) = −
∂F∂x(x, y, g(x, y))
∂F∂z(x, y, g(x, y)) .
Entao, como y e arbitrario em I2, segue que ∂g
∂x(x, y) e contınua em I1 × I2.
Analogamente, ∂g
∂ytambem. Portanto, g e de classe C1.
Exemplo 7. Ache pontos (x0, y0, z0) ∈ R3 tais que a equacao
x3+ y3 + z3 = x + y + z
tenha solucoes implicıtas diferenciaveis z = z(x, y) em uma bola aberta
contendo (x0, y0) e tais que z(x0, y0) = z0. Compute ∂z∂x
e ∂z∂y.
Resolucao.
Consideremos a superfıcie de nıvel zero de
F (x, y, z) = x3+ y3 + z3 − x − y − z.
Temos,∂F
∂z= 3z2 − 1
e Fz(x0, y0, z0) ≠ 0, se ocorre z0 ≠ ±√3
3. Entao, pelo Teorema 2, se o ponto
P0 = (x0, y0, z0) pertence a superfıcie F −1(0) e ainda z0 ≠ ±√3
3, segue que
existe uma funcao z = z(x, y) como desejada.
Ainda mais, derivando parcialmente a equacao
x3+ y3 + z3(x, y) − x − y − z(x, y) = 0 ,
obtemos
3x2+ 3z2(x, y)zx − 1 − zx = 0 , 3y2 + 3z2(x, y)zy − 1 − zy = 0 .
Logo,
∂z
∂x(x, y) = 1 − 3x2
3z2(x, y) − 1 e∂z
∂y(x, y) = 1 − 3y2
3z2(x, y) − 1 ∎
14

Exemplo 8. Se y = y(x) e z = z(x), x ∈ I = (a, b) ⊂ R, sao solucoes
implicıtas de
(S1)⎧⎪⎪⎨⎪⎪⎩
F (x, y, z) = 0G(x, y, z) = 0 ,
com F e G diferenciaveis num aberto de R3, compute as derivadas dy
dxe dz
dx
(em funcao das derivadas parciais de F e G).
Resolucao.
Por hipotese temos,
(S2) F (x, y(x), z(x)) = 0 e G(x, y(x), z(x)) = 0 ,
e portanto a curva γ(x) = (x, y(x), z(x)), x ∈ I = (a, b), esta contida na
interseccao das superfıcies de nıvel zero de F e de G: F (x, y, z) = 0 e
G(x, y, z) = 0.Obtemos dy
dxe dz
dxderivando as equacoes em (S2) em relacao a variavel x:
⎧⎪⎪⎨⎪⎪⎩∂F∂x
dxdx+
∂F∂y
dy
dx+
∂F∂z
dzdx= 0
∂G∂x
dxdx+
∂G∂y
dy
dx+
∂G∂z
dzdx= 0 ,
ou equivalentemente, ⎧⎪⎪⎨⎪⎪⎩∂F∂y
dy
dx+
∂F∂z
dzdx= −∂F
∂x
∂G∂y
dy
dx+
∂G∂z
dzdx= −∂G
∂x,
cuja solucao e dada pela Regra de Cramer,
dy
dx= −
RRRRRRRRRRRR∂F∂x
∂F∂z
∂G∂x
∂G∂z
RRRRRRRRRRRRRRRRRRRRRRRR∂F∂y
∂F∂z
∂G∂y
∂G∂z
RRRRRRRRRRRR
,dz
dx= −
RRRRRRRRRRRR∂F∂y
∂F∂x
∂G∂y
∂G∂x
RRRRRRRRRRRRRRRRRRRRRRRR∂F∂y
∂F∂z
∂G∂y
∂G∂z
RRRRRRRRRRRR
,
para todo x ∈ (a, b) tal queRRRRRRRRRRRR
∂F∂y
∂F∂z
∂G∂y
∂G∂z
RRRRRRRRRRRR≠ 0 no ponto γ(x) = (x, y(x), z(x)).
Notacao. O determinante jacobiano de F e G em relacao a y e a z, nesta
ordem, e:
∂(F,G)∂(y, z) =
RRRRRRRRRRRR∂F∂y
∂F∂z
∂G∂y
∂G∂z
RRRRRRRRRRRR.
15

De forma analoga indicamos os determinantes jacobianos de F e G em
relacao a x e z (nesta ordem) e em relacao a y e x (nesta ordem). Com tais
notacoes temos,
dy
dx= −
∂(F,G)∂(x,z)∂(F,G)∂(y,z)
,dz
dx= −
∂(F,G)∂(y,x)∂(F,G)∂(y,z)
Exemplo 9. Seja g(u, v) = f(x, y), com x = x(u, v) e y = y(u, v) dadasimplicitamente: ⎧⎪⎪⎨⎪⎪⎩
u = x2 + y2
v = xy .
Suponha x∂f
∂x− y ∂f
∂y= 0.
(a) Mostre que ∂y
∂u= −y
x∂x∂u.
(b) Compute ∂g
∂u.
(c) Mostre que f e constante sobre as hiperboles xy = c.
Resolucao.
(a) Temos v = x(u, v).y(y, v), ∀(u, v). Portanto, derivando tal equacao
em relacao a u temos,
0 = y∂x∂u+ x
∂y
∂u,
donde segue (a).
(b) Pela regra da cadeia temos,
∂g
∂u= ∂f
∂x∂x∂u+
∂f
∂y
∂y
∂u= ∂f
∂x∂x∂u
∂f
∂y( − y
x∂x∂u)
= (∂f∂x−
y
x
∂f
∂y)∂x∂u= 1
x(x∂f
∂x− y ∂f
∂y)∂x∂u
.
Entao, como x∂f
∂x− y ∂f
∂y= 0, segue que ∂g
∂u= 0.
(c) Seja c ∈ R fixado e γ(x) = (x, cx), x ≠ 0, uma parametrizacao da
hiperbole xy = c. Seja ainda, ϕ(x) = f(x, cx) a restricao de f sobre a
hiperbole. Entao, utilizando que xy = c na segunda igualdade abaixo,
ϕ′(x) = ∂f
∂x(x, c
x) + ∂f
∂y(x, c
x).(−c
x2 )= ∂f
∂x(x, y) − xy
x2
∂f
∂y(x, y)
= 1
x[x∂f
∂x− y ∂f
∂y](x, y) = 0.
Portanto, f e constante sobre as hiperboles xy = c ∎
16

Exemplo 10. Seja x = x(u, v) e y = y(u, v) dadas implicitamente pelo
sistema
(S)⎧⎪⎪⎨⎪⎪⎩
u = x2 + y2
v = xy .
(a) Compute ∂x∂u
e ∂y
∂uem termos de x e y.
(b) Determine um par de funcoes x = x(u, v) e y = y(u, v) solucoes implıcitas
de (S).
Resolucao.
(a) Derivando as duas equacoes de (S) em relacao a variavel u obtemos,
⎧⎪⎪⎨⎪⎪⎩1 = 2x∂x
∂u+ 2y ∂y
∂u
0 = y ∂x∂u+ x ∂y
∂u.
Neste ultimo sistema, multiplicando a primeira equacao por x, a 2ª por−2y e entao somando-as obtemos xu. Analogamente, multiplicando a
1ª equacao por −y, a segunda por 2x e somando-as obtemos yu. Assim,
∂x
∂u= x
2(x2 − y2) e∂y
∂u= − y
2(x2 − y2) .
(b) Do sistema (S) temos,
⎧⎪⎪⎨⎪⎪⎩(x + y)2 = x2 + 2xy + y2 = u + 2v(x − y)2 = x2 − 2xu + v2 = u − 2v ,
e pela escolha de sinais abaixo ao extrairmos as raızes quadradas no
sistema acima,
x + y = +√u + 2v , x − y = −
√u − v .
Donde, ⎧⎪⎪⎨⎪⎪⎩x = x(u, v) = √u+2v−
√u−2v
2
y = y(u, v) = √u+2v+√u−2v
2∎
No teorema abaixo utilizamos a notacao introduzida no Exemplo 7 para o
determinate jacobiano de duas funcoes em relacao a duas de suas variaveis.
17

TERCEIRA VERSAO DO TEOREMA DA FUNCAO IMPLICITA
Exemplo 11. Consideremos o sistema linear nas variaveis x, y e z,
⎧⎪⎪⎨⎪⎪⎩x + 2y + 3z = 0
4x + 5y + 6z = 0.
Como RRRRRRRRRRRR2 3
5 6
RRRRRRRRRRRR= −3 ≠ 0,
podemos determinar as variaveis y e z em funcao de x. De fato, escrevendo
⎧⎪⎪⎨⎪⎪⎩2y + 3z = −x
5y + 6z = −4x
obtemos
y =
RRRRRRRRRRRR−x 3
−4x 6
RRRRRRRRRRRRRRRRRRRRRRRR2 3
5 6
RRRRRRRRRRRR
= −2x e z =
RRRRRRRRRRRR2 −x
5 −4x
RRRRRRRRRRRRRRRRRRRRRRRR2 3
5 6
RRRRRRRRRRRR
= x.
Teorema 3. Consideremos F (x, y, z) e G(x, y, z), ambas de classe C1 no
aberto Ω ⊂ R3 e seja P0 = (x0, y0, z0) ∈ Ω, comF (x0, y0, z0) = 0 e G(x0, y0, z0) = 0.
Nestas condicoes, seÐ→∇F (x0, y0, z0) e Ð→∇G(x0, y0, z0) sao L.I. com
∂(F,G)∂(y, z) (x0, y0, z0) ≠ 0,
entao existem um intervalo aberto I, contendo x0, e tambem um par de
funcoes y = y(x) e z = z(x) de classe C1 em I, tais que
F (x, y(x), z(x)) = G(x, y(x), z(x)) = 0, ∀x ∈ I.Alem disso, temos y0 = y(x0) e z0 = z(x0). Tem-se ainda
dy
dx= −
∂(F,G)∂(x,z)∂(F,G)∂(y,z)
edz
dx= −
∂(F,G)∂(y,x)∂(F,G)∂(y,z)
,
sendo os determinantes jacobianos calculados em (x, y(x), z(x)), com x ∈ I.
18

Demonstracao.
Podemos supor, sem perda de generalidade, que ∂(F,G)∂(y,z) e nao nulo em Ω.
Suponhamos ainda, tambem sem perda de generalidade, a desigualdade∂F∂z(x0, y0, z0) ≠ 0. Pelo Teorema 2 a equacao F (x, y, z) = 0 define implicita-
mente uma funcao z = g(x, y), (x, y) ∈ V , sendo g de classe C1 em uma bola
aberta V , com V centrada em (x0, y0) e z0 = g(x0, y0). Analisemos, agora,
a funcao H(x, y) = G(x, y, g(x, y)), (x, y) ∈ V . E facil ver que a funcao H
e de classe C1, com H(x0, y0) = 0 e ∂H∂y(x0, y0) ≠ 0. De fato, lembrando que
o Teorema 2 estabelece ∂g
∂y= −
∂F∂y
∂F∂z
, obtemos entao
∂H∂y(x0, y0) = ∂G
∂y(x0, y0, g(x0, y0)) + ∂G
∂z(x0, y0, g(x0, y0))∂g∂y(x0, y0)
= ∂G∂y(x0, y0, z0) − ∂G
∂z(x0, y0, z0)
∂F∂y(x0,y0,z0)
∂F∂z(x0,y0,z0)
=∂F∂z
∂G∂y−∂F
∂y∂G∂z
∂F∂z
(x0, y0, z0) = −∂(F,G)∂(y,z)∂F∂z
(x0, y0, z0) ≠ 0 .
Como ja sabemos, a equacao H(x, y) = 0, ou G(x, y, g(x, y)) = 0, define
implicitamente uma funcao y = y(x), com x ∈ I, de classe C1 no intervalo
I e y0 = y(x0). Assim sendo, para completarmos a prova deste teorema
definamos a funcao, obviamente de classe C1, z(x) = g(x, y(x)), onde x ∈ I,e passemos a verificacao das propriedades requeridas. E claro que
G(x, y(x), z(x)) = 0 , F (x, y(x), z(x)) = 0 , y(x0) = y0 e z(x0) = g(x0, y0) = z0.
Para determinarmos as formulas para as derivadas das funcoes y = y(x) ez = z(x), derivemos em relacao a x o par de equacoes
⎧⎪⎪⎨⎪⎪⎩F (x, y(x), z(x)) = 0G(x, y(x), z(x)) = 0.
Obtemos, ⎧⎪⎪⎨⎪⎪⎩∂F∂y
dy
dx+
∂F∂z
dzdx= −∂F
∂x
∂G∂y
dy
dx+
∂G∂z
dzdx= −∂G
∂x.
Donde, pela regra de Cramer,
dy
dx= −
∂(F,G)∂(x,z)∂(F,G)∂(y,z)
edz
dx= −
∂(F,G)∂(y,x)∂(F,G)∂(y,z)
∎
19

4ª VERSAO DO TEOREMA DA FUNCAO IMPLICITA (DINI)
A descoberta do teorema da funcao Implıcita e geralmente atribuıda a A. L.
Cauchy (1789-1857). Porem, a primeira formulacao deste resultado para um
sistema com varias equacoes e variaveis deve-se ao italiano Ulisse Dini (1845-
1918). Em sua prova Dini (1870) usou inducao e a nao degenerescencia
do determinante jacobiano. Na Italia, o Teorema da Funcao Implıcita e
atribuıdo a Dini, cuja versao nao garante a unicidade local da solucao.
Notacoes. Indiquemos
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
x = (x1, ..., xm) ∈ Rm,
y = (y1, . . . , yn) ∈ Rn,
y′ = (y2, . . . , yn) ∈ Rn−1,
y = (y1;y′) ∈ R ×Rn−1
(x1, . . . xn;y1, . . . , yn) = (x;y) = (x;y1;y′).Teorema 5. Sejam n funcoes F i(x1, . . . , xm;y1, . . . , yn), com i = 1, . . . , n,de classe C1 em um aberto de Rm ×Rn contendo o ponto (a; b) e tais que
F 1(a; b) = 0, . . . , F n(a; b) = 0.Suponhamos que e nao nulo o determinante da matriz
J =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
∂F1
∂y1(a; b) . . . ∂F1
∂yn(a; b)
. . .
. . .
. . .
∂Fn
∂y1(a; b) . . . ∂Fn
∂yn(a; b)
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
.
Entao, existem n funcoes y1(x), . . . , yn(x) definidas em uma vizinhanca
aberta de a que satisfazem, para cada x nesta vizinhanca,
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
F1[x;y1(x), . . . , yn(x)] = 0,.
.
Fn[x;y1(x), . . . , yn(x)] = 0,e
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
y1(a) = b1,.
.
yn(a) = bn.
20

Prova. Seja In a matriz identidade de ordem n.
Pela regra da cadeia as funcoes
Fi(x; z) = Fi[x; b + J−1(z − b)], onde i = 1, . . . , n,
satisfazem [∂Fi
∂zj(a; b)]
n×n= JJ−1 = In. Podemos entao supor J = In.
A seguir, argumentemos por inducao.
Se n = 1, sabemos que a afirmacao e valida. Suponhamos a afirmacao
valida para n − 1. Dado um sistema com n equacoes e n variaveis
dependentes, como acima, consideremos a primeira das equacoes
F1(x;y1;y′) = 0 e a condicao F1(a; b1; b′) = 0.Como ∂F1
∂y1(a; b1; b′) = 1, segue que existe uma funcao ϕ(x;y′) definida
em uma vizinhanca aberta de (a; b′) tal queF1[x;ϕ(x;y′);y′] = 0 e ϕ(a; b′) = b1.
Substituindo a funcao ϕ nas equacoes seguintes obtemos o sistema,
com n − 1 equacoes e n − 1 variaveis dependentes,
S ∶
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
F2[x;ϕ(x;y2, . . . , yn);y2, . . . , yn] = 0,.
.
Fn[x;ϕ(x;y2, . . . , yn);y2, . . . , yn] = 0e
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
F2[a;ϕ(a; b′); b′] = 0,.
.
Fn[a;ϕ(a; b′); b′] = 0.Derivando as equacoes em S obtemos
∂Fi
∂y1(a; b) ∂ϕ
∂yj(a; b′) + ∂Fi
∂yj(a; b) = 0 +
∂Fi
∂yj(a; b), onde 2 ≤ i, j ≤ n.
E claro que [∂Fi
∂yj(a; b)]
2≤i,j≤n= In−1. Por hipotese de inducao existem
funcoes y2(x), . . . , yn(x) definidas numa vizinhanca de a tais que
Fi[x;ϕ(x;y2(x), . . . , yn(x));y2(x), . . . , yn(x)] = 0, para cada i = 2, . . . , n,
e satisfazendo y2(a) = b2, . . . , yn(a) = bn. Tambem temos
F1[x;ϕ(x;y2(x), . . . , yn(x));y2(x), . . . , yn(x)] = 0.Definindo y1(x) = ϕ(x;y2(x), . . . , yn(x)) encerramos a prova ∎
21
REFERENCIAS
1. Guidorizzi, H. L., Um Curso de Calculo, Vol 2, 5ª ed., Editora LTC.
2. Hairer, E., and Wanner, G., Analysis by Its History, Springer-Verlag,
1996.
3. Krantz, S. G., and Parks, H. R., The Implicit Function Theorem -
history, theory and applications, Birkhauser, 2002.
4. Lima, Elon, Curso de Analise, Vol 2, 11ª ed., IMPA.
5. Simmons, G., Calculo Com Geometria Analıtica, Vol 2, 1ª ed., Makron
Books.
22