Planning, mobility, and counter guerrilla warfare
12
1964 [5] [6] IEEE TRANSACTIONS ON ENGINEERING MANAGEMENT 63 , "The PERT model for the distribution of an activity time," Operations Research, vol. 10, pp. 405-406; 1962. ' and NASA Guide, PERT/COST," Oiiice of the Secre- tary of Defense and Nat'l Aeronautics and Space Administra- tion, AVashington, D. C ; June, 1962. [7] Halim Dogrusoz, "Development programming," Operations Research, vol. 9, pp. 753-755; 1961. [8] A. R. Dooley, "Interpretations of PERT," Harvard Business Rev., vol. 42, pp. 160-168; March-April, 1964. [9] Howard Eisner, "A generalized network approach to the planning and scheduling of a research project," Operations Re- search, vol. 10, pp. 115-125; 1962. [10] Henr3^ B. Eyring, "Evaluation of Planning Models for Re- search and Development Projects," Unpub. DBA Thesis, Harvard Business School, Boston, Mass.; 1963. [11] Raoul J. Freeman, "A generalized PERT," Operations Research, vol. 8, p. 281; 1960. [12] : , "A generalized network approach to project activity sequencing," IRE T RANS, ON E NGINEERING M ANAGEMENT, vol. EM-7, pp. 103-107; September, 1960. [13] D. R. Fulkerson, "A network flow computation for project cost curves," Alanaqemcnt Sci., vol. 7, pp. 167-178; Januarv, 1961. [14] Frank E. Grubbs, "Attempts to validate certain PERT sta- tistics or 'picking on PERT'," Operations Research, vol, 10, pp. 912-915; 1962. [15] James E. Kelley, Jr., "Critical i)iith planning and scheduling: mathematical basis," Operations Research, vol, 9, pp. 296-320; 1961. [16] · , "The Critical-Path Method: Resources Planning and Scheduling," in ''Industrial ScheduHn(f," J. F. Muth and G. L. Thompson Eds., Prentice-Hall, Englewood Cliffs, N. J,, ch. 21; 1963. [17] S. Lambourn, "Resource allocation and invdti-projcct sched- uling (RAMPS) a new tool in planning and control," Computer J., vol. 5, pp. 300-304; 1963, [18] F. K. Levy, G. L. Thompson, ancl J. D. Wiest, "Multi-ship, [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] multi-shop workload smoothing program," Nav. Res. Logistics Quart., vol, 8, pp. 37-44; 1962. , , , "The ABCs of the critical path method," Harvard Business Review, vol, 41, pp. 98-108; Sept.-Oct, 1963. A. A. McGee and M. D, Markarian, "Optimum allocation of research/engineering manpower within a multi-project organi- zational structure," IRE T RANS, ON E NGINEERING M ANAGE- MENT , vol. EM-9, pp. 104-108; September, 1962. K. R. MacCrimmon and C. A. Ryavec, "An Analytical Study of the PERT Assumptions," RAND Corp,, Santa Monica, Calif., Memo, RM-3408-PR; December, 1962. D. G, Malcolm, J, H. Roseboom, C. E. Clark, and W. Fazar, "Application of a technique for research and development program evaluation," Operations Research, vol. 7, pp. 646-669; 1959, D. G. Malcolm, "Extensions and Application of PERT as a System Management Tool," presented at The Armed Forces Management Association Seventh National Conference, Wash- ington, D, C, March, 1961. Robert W. Miller, "How to plan and control with PERT," Harvard Business Rev., pp. 93-104; March-April, 1962. "NASA PERT and Companion Cost System Handbook,'' Nat'l. Aeronautics and Space Administration, Washington, D, C ; 1962. Merton J, Peck and Frederic M. Scherer, "The Weapons Acquisition Process: An Economic Analysis," Graduate School of Business Administration, Harvard Uiiiversitv, Boston, Mass.; 1962. PERT Coordinating Group, "PERT Guide for Management Use," U. S. Government Printing Ofhce, Washington, D. C; June, 1963. J. W. Pocock, "PERT as an analytical aid for program plan- ning—its payoffs and problems," Operations Research, vol. 10, pp. 893-903; 1962. Richard M. Van Slyke, "Monte Carlo methods and the PERT prol^lem," Operations Research, vol. 11, pp. 839-860; 1963. Planning, Mobility, and Counter Guerrilla Warfare T. J. RUBIN AND NORMAN HITCHMAN Summary—The process of solution identification is defined and structured as one of the four key components of the R & D planning process. Within the process some workable concepts of mobility are derived relating to the time factor in mihtary operations. Data for the ballistic projectile hardware family are used to illustrate mobility capabilities. The counter guerrilla strategy of reaction to guerrilla actions is discussed and illustrative mobiUty requirements resulting from the strategy are displayed. A counter guerrilla system is deduced functionally and its mobility component is highlighted. Finally, the system feasibility test is described for the coiinter guerrilla mission, both for single targets and target com- plexes. The heuristic characteristics of the approach described and the value of working within a consistent context are emphasized throughout the paper. Manuscript received June 10, 1963; revised March 6, 1964, The authors are with the General Electric Co., Santa Barbara, Calif. INTKODUCTION rmHE GENERAL staff activity of planning en- compasses three principal tasks Avhose results form a major basis for executive decision. 1) Identification of problems, 2) Identification of all known solutions to the problems, 3) Identification of preferred solutions to the problems. The planning process and the tasks delineated above apply to all hmnan activities, Avhether they are the activities of an individual or the activities of a nation. Planning also has a dimension in time. It may be applied to today 's activities or to activities of future interest. The orientation of this paper is to long-range military planning. For this purpose, the three tasks of planning should be restated as follows: 1) Identification of future world political problems and prospects, and the military missions deduced there- from, 2) Identification of all technological solutions which might be available to solve such problems by satisfy-
Transcript of Planning, mobility, and counter guerrilla warfare

1964
[5]
[6]
IEEE TRANSACTIONS ON ENGINEERING MANAGEMENT 63 , "The PERT model for the distribution of an activity
time," Operations Research, vol. 10, pp. 405-406; 1962. 'ΌΟΏ and NASA Guide, PERT/COST," Oiiice of the Secre
tary of Defense and Nat'l Aeronautics and Space Administration, AVashington, D. C ; June, 1962.
[7] Halim Dogrusoz, "Development programming," Operations Research, vol. 9, pp. 753-755; 1961.
[8] A. R. Dooley, "Interpretations of PERT," Harvard Business Rev., vol. 42, pp. 160-168; March-April, 1964.
[9] Howard Eisner, "A generalized network approach to the planning and scheduling of a research project," Operations Research, vol. 10, pp. 115-125; 1962.
[10] Henr3^ B. Eyring, "Evaluation of Planning Models for Research and Development Projects," Unpub. DBA Thesis, Harvard Business School, Boston, Mass.; 1963.
[11] Raoul J. Freeman, "A generalized PERT," Operations Research, vol. 8, p. 281; 1960.
[12] : , "A generalized network approach to project activity sequencing," IRE T R A N S , O N E N G I N E E R I N G M A N A G E M E N T , vol. EM-7, pp. 103-107; September, 1960.
[13] D. R. Fulkerson, "A network flow computation for project cost curves," Alanaqemcnt Sci., vol. 7, pp. 167-178; Januarv, 1961.
[14] Frank E. Grubbs, "Attempts to validate certain PERT statistics or 'picking on PERT' ," Operations Research, vol, 10, pp. 912-915; 1962.
[15] James E. Kelley, Jr., "Critical i)iith planning and scheduling: mathematical basis," Operations Research, vol, 9, pp. 296-320; 1961.
[16] · , "The Critical-Path Method: Resources Planning and Scheduling," in ''Industrial ScheduHn(f," J. F. Muth and G. L. Thompson Eds., Prentice-Hall, Englewood Cliffs, N. J,, ch. 21; 1963.
[17] S. Lambourn, "Resource allocation and invdti-projcct scheduling (RAMPS) a new tool in planning and control," Computer J., vol. 5, pp. 300-304; 1963,
[18] F . K. Levy, G. L. Thompson, ancl J. D. Wiest, "Multi-ship,
[19]
[20]
[21]
[22]
[23]
[24]
[25]
[26]
[27]
[28]
[29]
multi-shop workload smoothing program," Nav. Res. Logistics Quart., vol, 8, pp. 37-44; 1962.
, , , "The ABCs of the critical path method," Harvard Business Review, vol, 41, pp. 98-108; Sept.-Oct, 1963. A. A. McGee and M. D, Markarian, "Optimum allocation of research/engineering manpower within a multi-project organizational structure," IRE T R A N S , O N E N G I N E E R I N G M A N A G E M E N T , vol. EM-9, pp. 104-108; September, 1962. K. R. MacCrimmon and C. A. Ryavec, "An Analytical Study of the P E R T Assumptions," RAND Corp,, Santa Monica, Calif., Memo, RM-3408-PR; December, 1962. D . G, Malcolm, J, H. Roseboom, C. E. Clark, and W. Fazar, "Application of a technique for research and development program evaluation," Operations Research, vol. 7, pp. 646-669; 1959, D. G. Malcolm, "Extensions and Application of PERT as a System Management Tool," presented at The Armed Forces Management Association Seventh National Conference, Washington, D, C , March, 1961. Robert W. Miller, "How to plan and control with PERT," Harvard Business Rev., pp. 93-104; March-April, 1962. "NASA PERT and Companion Cost System Handbook,'' Nat'l. Aeronautics and Space Administration, Washington, D, C ; 1962. Merton J, Peck and Frederic M. Scherer, "The Weapons Acquisition Process: An Economic Analysis," Graduate School of Business Administration, Harvard Uiiiversitv, Boston, Mass.; 1962. PERT Coordinating Group, "PERT Guide for Management Use," U. S. Government Printing Ofhce, Washington, D. C ; June, 1963. J. W. Pocock, "PERT as an analytical aid for program planning—its payoffs and problems," Operations Research, vol. 10, pp. 893-903; 1962. Richard M. Van Slyke, "Monte Carlo methods and the P E R T prol^lem," Operations Research, vol. 11, pp. 839-860; 1963.
Planning, Mobility, and Counter Guerrilla Warfare T . J . R U B I N AND N O R M A N H I T C H M A N
Summary—The process of solution identification is defined and structured as one of the four key components of the R & D planning process. Within the process some workable concepts of mobility are derived relating to the time factor in mihtary operations. Data for the ballistic projectile hardware family are used to illustrate mobility capabilities. The counter guerrilla strategy of reaction to guerrilla actions is discussed and illustrative mobiUty requirements resulting from the strategy are displayed. A counter guerrilla system is deduced functionally and its mobility component is highlighted. Finally, the system feasibility test is described for the coiinter guerrilla mission, both for single targets and target complexes.
The heuristic characteristics of the approach described and the value of working within a consistent context are emphasized throughout the paper.
Manuscript received June 10, 1963; revised March 6, 1964, The authors are with the General Electric Co., Santa Barbara,
Calif.
INTKODUCTION
r m H E G E N E R A L staff ac t iv i ty of p l ann ing enc o m p a s s e s t h r ee pr inc ipa l t a s k s Avhose resul ts form a m a j o r bas is for execut ive decision.
1) Iden t i f i ca t ion of p rob lems , 2) Iden t i f i ca t ion of all k n o w n solut ions t o t h e p rob lems , 3) Iden t i f i ca t ion of preferred solut ions t o t h e p rob l ems . T h e p l a n n i n g process a n d t h e t a sks de l inea ted a b o v e
a p p l y t o al l h m n a n act ivi t ies , Avhether t h e y a re t h e ac t iv i t ies of a n ind iv idua l or t h e ac t iv i t ies of a n a t i o n . P l a n n i n g a lso has a d imens ion in t ime . I t m a y be app l i ed t o t o d a y ' s ac t iv i t ies or t o act ivi t ies of fu tu re in te res t .
T h e o r i e n t a t i o n of t h i s pape r is t o long- range mi l i t a ry p l ann ing . F o r t h i s pu rpose , t h e t h r e e t a sks of p l a n n i n g should be r e s t a t e d as follows:
1) Ident i f ica t ion of fu tu re world pol i t ical p rob l ems a n d p rospec t s , a n d t h e mi l i t a ry missions d e d u c e d t h e r e from,
2) Iden t i f i ca t ion of al l technological so lu t ions w h i c h m i g h t be ava i lab le t o solve such p r o b l e m s b y sat isfy-

64 IEEE TRANSACTIONS ON ENGINEERING MANAGEMENT June
ing t h e reciuiremeiits of t h e missions, 3) IdiMitification of t h e prefei-red technological solu
t ions, i.e., those Avhich a re in consonance Avith budget a r y and . ' o r o the r resource or o rgan iza t iona l cons t ra in t s .
I t is i m p o r t a n t t o no te t h a t p rob l em identif ication, solut ion identif icat ion, a n d prefer red solut ion choice a r e i n t e r d e p e n d e n t t a sks a n d p a r t of a closed-loop p l a n n i n g process. l i ecogn i t ion of th i s q u a l i t y of i n t e rdependence suggested t h e need for a n ovei'all f ramework or s t r u c t u r e t o which effort on t he se t a s k s could be m a d e explicit . Such a s t r u c t u r e was developed a n d is r epor ted in T E M P O SP-164, " A S t r u c t u r e for R e s e a r c h a n d D e v e l o p m e n t P l a n n i n g . "
Th i s p a p e r focusses on t h e second long range mi l i t a ry p l annh ig t a sk , t h e ident i f icat ion of technologica l solut ions , and emphas izes t h e m e a n i n g a n d role of mob i l i ty in t h a t context . T h e e lements of t h i s t a s k inc lude mission deiini t ion, d e t e r m i n a t i o n of miss ion r e q u i r e m e n t s , de te r mina t ion of technologica l s t a t e of a r t , a n d t h e in t e rac t ion of r e q u i r e m e n t s a n d capabi l i t i es in a feasibility t e s t . T h e s e e lements ai'e cons idered in t h e following o rde r :
1) T h e so lu t ion idc^ntiiication t a s k — s t r u c t u r e a n d concepts
2) Mobi l i ty concep ts 3) Technological s t a t e of a r t — s a m p l e ballist ic p r o
jectile capabi l i t ies 4) T h e coun te r guei-rilla mis s ion—mobi l i ty i-eipiiremtMits 5) T h e c oun t e r guerri l la sy s t em—capab i l i t i e s (V) T h e feasibil i ty t es t .
SOLUTION IDKXTIFICATION Under ly ing t h e ident if icat ion of feasible so lu t ions is t h e
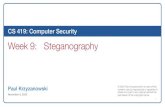
need to ident i fy m i l i t a i y miss ions t o which fu tu re t echnology m a y b e addressed . M i l i t a r y missions a re cons idered l ierem t o consis t of a mi l i t a ry ac t iv i ty , a phys ica l en-v i romnen t , a n d a t h r e a t or o p p o n e n t . A miss ion t h e n is a mi l i t a iy a c t i v i t y conduc ted in t h e presence of a t h r e a t in a n associa ted phys ica l e n v i r o n m e n t . F ig . 1 is a s imple r ep re sen t a t i on of t h e so lu t ion ident i f icat ion process . As suggested t h e miss ion s p e c t r u m is composed of combina t ions of a c t i v i t y , t h r e a t , a n d e n v i r o n m e n t . Disc re te missions m t h e s p e c t r u m yield miss ion r e q u i r e m e n t s . T h e s e miss ion r e q u i r e m e n t s i n t e r p l a y w i t h s t a t e of a r t capabi l i t ies t o yield all feasible s y s t e m s ( somet imes none ) , i.e., those Avhich satisfy t h e r e q u i r e m e n t s . Cons ider t h r e e add i t iona l concep t s t o comple t e t h e f rame of reference for t h e ba l ance of t h e pape r .
Physical Environmental Factors
Phys ica l e n v h o n m e n t m a y be defined a s t h e fixed a n d t r a n s i t o r y charac te r i s t i c s of t h e e a r t h ' s surface, subsur face, a t m o s p h e r e a n d t h e expanse of space . T h e effect of phys ica l e n v i r o n m e n t is t o es tab l i sh b o u n d s o n t h e choice a n d c o n d u c t of mi l i t a ry ac t iv i t i e s a n d t h r e a t . W h i l e knowledge of t h e m i c r o e n v i r o n m e n t of a p a r t i c u l a r locale is crit ical t o t h e conduct of m i l i t a r y ac t iv i t ies , knowledge of t h e m a c r o e n v i r o m n e n t is sufficient for t h e planning of
PHYSICAL MILITARY THREAT ΕΝΎΙΚΟΝΜΕΝΤ ACTIVITY
NUSSION SPECTRUM
MISSION REQUIREMKNTS ;
TECHNOLOGICAL STATE OF ART
FEA3IbLE SOLUTIONS
Fig. 1—Solution identification i)rocess.
t he m i l i t a i y activit}^ a n d for t h e provis ion of su i t ab le forces a n d h a r d w a r e . For t h i s l a t t e r pu rpose , i t is sugges t ed t h a t t h e phys ica l e n v i r o n m e n t can be meaningfu l ly classified in to a relativel}^ smal l n u m b e r of fac tors a n d g rada t ions . Th i s ΛΥΙΙΙ be d e m o n s t r a t e d l a t e r in t h e p a p e r .
Funclional Mission Requirements
Mission r e q u i r e m e n t s a re a desc i ip t ion of t h e c h a r a c t e r istics noiided in m i l i t a r y s y s t e m s in o rde r t o c o n d u c t a n ac t iv i ty u n d e r v a r y i n g e i u a r o n m e n t a l condi t ions . Miss ion r equ i r emen t s h a v e ce r t a in funct ional cha rac te r i s t i c s which a p p e a r to be c o m m o n t o all missions. T h r e e such charac te r i s t ics h a v e b e e n identified.
1) Intelligence—information Avhich is necessary for d e t e r m i n i n g t h e exis tence of and the n a t u r e of t h e j o b t o b e done .
2) Payload power—the mi l i t a ry "ef fec t" w h i c h it is necessa ry t o b r i n g to b e a r a n d t h e " i m p a c t " of t h e effect necessary t o do t h e job .
3) Mobility—the t i m e c o n s t r a i n t Avithin Avhich t h e j o b m u s t be done in o rde r t o be done effectively.
These in t u r n g e n e r a t e o rgan iza t iona l a n d i n fo rma t iona l r equ i r emen t s as folloAvs:
1) Command and control—the organ iza t iona l s t r u c t u r e w h i c h m u s t e v a l u a t e intell igence, a n d select a n d m o n i t o r t h e i m p l e m e n t i n g devices ava i l ab le t o d o t h e j o b .
2) Communications—the t r ansmis s ion of i n f o r m a t i o n in to a n d wdthin t h e c o m m a n d a n d cont ro l s t r u c t u r e a n d also t o a n d from t h e imp lemen t ing s u b s y s t e m s .
These a r e t h e r e q u i r e m e n t s w^hich m u s t be m e t b y imp le m e n t i n g h a r d w a r e i n o r d e r t o es tabl ish feasibi l i ty for a n y mission. I t is i m p o r t a n t t o n o t e t h a t t r u e mi l i t a ry " s y s t e m s " a r e composed of a m i x of c o m p o n e n t s w h i c h sat isfy all t h e func t iona l r e q u i r e m e n t s .

1964 Rubin and Hitchvian: Counter-Guerilla Warfare 65
State of Art Capabililies
H a r d w a r e devices, l ike t h e phys ica l e n v i r o n m e n t , c a n be cons idered generically for feasibi l i ty assessments . T h e c o n c e p t of t h e h a r d w a r e fami ly is n o t new a n d is m o s t useful in reducing the t o t a l a m o u n t of in fo rmat ion needed for feasibiUty test ing. I t a p p e a r s t h a t al l hardw^are devices^ fall i n t o one of five major classes.
1) Data gatherers and processors—all devices wh ich collect d a t a o r conve r t i t t o in format ion .
2) Effects producers—all devices A\4iose effective a n d t i m e l y delivery satisfies t h e miss ion objecti\ ' 'e.
3) Platforms or motive devices—all devices wh ich a c c o m pl i sh phys ica l m o v e m e n t or p ro jec t ion from one l oca t i on to another .
4) Command and control devices—all devices Avhich exped i t e t h e ΑοΛν or ana lys i s of in fo rmat ion .
5) Coinnvunication devices—self-defining.
T h e five classes of h a r d w a r e devices cor re la te t o a la rge e x t e n t w i t h t h e five func t iona l miss ion r e q u i r e m e n t s . A t r u e s y s t e m will include a t leas t one c o m p o n e n t device f rom e a c h of these five classes .
MOBILITY
M o b i l i t y has been defined as one of t h e funct ional r e q u i r e m e n t s of all missions. W h a t a r e i ts key c h a r a c t e r istics a n d ΙιΟΛΥ does it dilfer f rom m o v e m e n t , per se? If t h e o p e r a t i o n a l question, ' ^ W h y m o v e ? ' ' is addressed , ins ight is i m m e d i a t e l y gained in to t h e n a t u r e of mobi l i ty . T h e r e a r e a t leas t t h r ee answers :
1) T h e range of a m i l i t a r y s y s t e m is d e p e n d e n t on m o v e m e n t .
2) T h e t imeliness of a p p l i c a t i o n of a mi l i t a ry sy s t em is d e p e n d e n t on m o v e m e n t .
3) T h e survivabi l i ty of a mi l i t a ry sy s t em m a y d e p e n d on m o v e m e n t .
Range Extension
T h e p o t e n t i a l range of a n y h a r d Λ v a r e device consis ts of tw^o c o m p o n e n t s , i ts ' ' b u i l t - m " range , (such a s t h e m a x i m u m r a d i u s of a hel icopter , o r t h e m a x i m u m t r ansmiss ion r a n g e of a radio set) a n d r a n g e i n c r e m e n t s a t t a i n a b l e p r io r t o or d u r i n g t h e o p e r a t i o n of t h e device. I n t h e p e r f o r m a n c e of a mission, r a n g e m u s t b e e x t e n d e d a t a r a t e c o m m e n s u r a t e w i t h t h e r e q u i r e m e n t s of t h e miss ion. I n o t h e r words , d e v i c e s m a y be successfully app l i ed t o miss ion object ives only if suflftcient t i m e exists t o p e r m i t m o v e m e n t wi th in t h e t i m e life of t h e miss ion objec t ive .
Timeliness of Application
T h e t imel iness of a p p l i c a t i o n of a mi l i t a ry s y s t e m is of ten cr i t ica l a n d is no th ing m o r e t h a n formal iza t ion of t h e a d a g e " b e t h e r e fustest w i t h t h e m o s t e s t . " T h n e l m e s s of app l i c a t i on t h rough m o v e m e n t therefore refers t o m o v e -
1 Hardware devices should be construed to include biological devices.
m e n t w i th in mission d e m a n d t i m e and is a r e q u i r e m e n t for h a r d w a r e systems.
Survivability
Surv ivab i l i t y of mi l i t a ry s y s t e m s m a y be improved by-m o v e m e n t . T h e mechan i sm invo lved is den ia l of i n t e l l igence t o t h e e n e m y . T h i s fo rm of m a n e u v e r of ten i s n a m e d '^defensive m o v e m e n t ' ' o r ^Mefensive m o b i l i t y . " N o r m a l l y , a pe r fo rmance t i m e p e n a l t y occurs in t h i s t y p e of m o v e m e n t . T h e m a g n i t u d e of t h e p e n a l t y i s d e p e n d e n t on t h e pa r t i cu la r ope ra t i ona l doc t r i ne d i c t a t i n g t h e n a t u r e of t h e defensive m o v e m e n t .
A review of these answ^ers t o t h e ques t ion , " W h y m o v e ? , " sugges ts t h a t t h e d i s t inguish ing cha rac te r i s t i c of mobi l i ty is t h e impos i t ion of t i m e cons t r a in t s u p o n m o v e m e n t , Avhether for offensive or defensive purposes . I t a p p e a r s t h a t t h e mobi l i ty of h a r d w a r e devices should b e m e a s u r e d in t e r m s of the i r t i m e sufficiency in m e e t i n g miss ion r equ i remen t s . T h i s is a k e y no t ion i n th is p a p e r .
Cox'CRPTs FOR MOBILITY
F r o m t h e p reced ing discussion, several concepts foi mob i l i t y m a y b e disti l led. T h e s e concep t s cons t i t u t e a useab le definit ion of mi l i t a ry mob i l i t y a n d form t h e bas i s for m u c h of t h e s u b s e q u e n t ana lys i s in t h e pape r .
1) T h e essence of mobi l i ty is t h e t e m p o r a l i n t e r ac t i on be tween s y s t e m a n d mission.
2) M o b i l i t y r e q u i r e m e n t s a r e imposed b y the miss ion a s t h n e cons t r a in t s o n s y s t e m per fo rmance .
3) All mi l i t a ry s y s t e m s resemble t r a n s p o r t s y s t e m s , r e spond ing to ex te rna l ly gene ra t ed t ime t ab l e s .
4) A sys t em m u s t represen t a comple te , closed-loop process .
T h e first tAvo concep ts do n o t r equ i re fu r the r e l abo ra t i on . Suffice i t t o s ay t h a t t h e a d d i t i o n of wheels , t r a cks , Λ v m g s , or a n y o the r " p e r f o r m a n c e a d d i t i v e " is n o t necessar i ly synono inous w i t h a n increase i n mobi l i ty . T h e s e s u p p l e m e n t s s imply enhance m o v e m e n t wdthin ce r t a in pe r fo rma n c e enve lopes—which m a y or m a y n o t b e a r a r e l a t ionsh ip t o t h e mob i l i t y r e q u i r e m e n t s of t h e miss ion.
W i t h i n t h e con tex t der ived he re , i t is n o t difficult t o ident i fy all mi l i t a ry sj'-stems a s t r a n s p o r t sys tems . O n d e m a n d , mi l i t a ry sy s t ems t r ans fe r , p ropel , or p ro jec t a ca rgo or effect t o i ts des t ina t ion . T h e r e is no basic difference be tween del ivering a w a r h e a d b y S S M , de l iver ing a message b y radio, or de l iver ing milk b y t ruck . T h i s in l ie rent suni la r i ty p e r m i t s t h e design of s imple a n d straightforAvard methods for m e a s u r i n g a n d e v a l u a t i n g mob i l i t y for al l mi l i t a ry sys t ems .
T h e concept t h a t a sys t em m u s t r ep resen t a comple t e process is pa r t i cu la r ly i m p o r t a n t w i t h r e spec t t o t h e t i m e fac tor in mi l i t a ry opera t ions . A l l sy s t em e lements m u s t a c t Λvithhα t h e t o t a l t h n e ava i l ab le t o ac t ; t h e y m u s t b e identified a n d the i r t i m e pe r fo rmance m u s t be m e a s u r e d if t h e t r u e capabi l i ty for miss ion fulfil lment is t o be a s ce r ta ined .
A s a n example , consider t h e h u m a n be ing t o be a c o m -

6ΰ IEEE TRANSACTIONS ON ENGINEERING MANAGEMENT June
ple te sys t em; in fact, any of a m m i b e r of c o m p l e t e sys tems , depend ing u p o n Avhici i subsys tems a re e m p l o y e d . M a n has sensing devices a n d a b ra in for d a t a g a t h e r i n g a n d processing; effects p roducers for ta lk ing, s t r ik ing , Avalking, etc ; a musculoskele ta l p la t form or m o t i v e device , a n d a centra l ne rvous sys t em for c o m m a n d , cont ro l , a n d in t e rna l communica t ion .
I n general , mi l i t a ry h a r d w a r e devices pe r fo rm funct ions ana logous t o t h o s e per formed by h u m a n s u b s y s t e m s . T h e y are s u b s t i t u t e s wdiich a r e in tended to e x t e n d a n d magni fy t h e r ange of h u m a n capabil i t ies . E q u a l l y i m p o r t a n t , u n less t h e hard^vare eyes, brain, p l a t fo rm a n d o t h e r s u b sys tems r eac t in t h e rea l t i m e ava i l ab le for miss ion pe r formance, t h e effectiveness of t h e s y s t e m is sub jec t t o doub t . I n t e r m s of mobi l i ty , t hen , t h e s y s t e m process m u s t be comple te a n d t h e comple te s y s t e m - t i m e pe r fo rmance m u s t be assessed.
MOBILITY FEASIBILITY TESTING
Foregoing references to mobi l i ty r e q u i r e m e n t s a n d capabil i t ies sugges t t h e m a n n e r m Avhich m o b i l i t y can be examined in t h e solut ion ident i f icat ion process . B o t h r equ i r emen t s a n d capabil i t ies m a y be m e a s u r e d in t e r m s of t ime , a n d t h e feasibil i ty t e s t c o n d u c t e d a s a re la t ive ly simple m a t c h i n g process. C a n d i d a t e s y s t e m s a r e considered mobi le wdien t i m e response is less t h a n t h e mission derived t h n e ava i l ab le ; c and ida t e s y s t e m s a r e cons idered no t mobi le w h e n t i m e response is g rea t e r t h a n t h e t i m e avai lable . T h i s is a " g o , n o - g o " a p p r o a c h des igned t o identify p r o b l e m s a n d solut ions for m o r e specific inves t iga t ion .
CAPABILITIES
A useful expression for t h e mobi l i ty capab i l i t y of a sys tem is i t s t i m e per formance profile. S u c h a profile exammes t h e s t ep -by- s t ep ope ra t ion of t h e s y s t e m cycle a n d m e a s u r e s i t s t i m e consumpt ion p a t t e r n .
Profiles c a n b e p r e p a r e d a t a n y level of h a r d A v a r e aggre gat ion, from specific sys tems composed of specific devices t o generic s y s t e m s consist ing of families of devices . T h i s sect ion i l lus t ra tes t h e deve lopmen t of gener ic s y s t e m profiles. I t also indica tes t h e v a l u e of t h e in fo rma t ion which is gene ra t ed in t h e process of deve lop ing t i m e pe r formance profiles. Of ten serendipi ty occurs a n d u n e x p e c t e d resul ts lend zest t o t h e researcher.
What is a Hardware Family!
I n t h e discussion of s ta te-of-ar t capabi l i t ies , all mil it a r y h a r d w a r e Avas shown t o fall in five b r o a d classes. Th i s classification was funct ional m n a t u r e a n d re la ted t o t h e five funct ional mission r equ i r emen t s .
E a c h of t h e ma jo r classes consis ts of m a n y ind iv idua l end i t e m devices . F o r example , c o m m u n i c a t i o n devices r ange from d r u m s , flags, a n d s m o k e s ignals t o devices ut i l iz ing t h e e lec t romagnet ic s p e c t r u m . H o w e v e r , desp i te t h e large a s s o r t m e n t , h a r d w a r e devices c a n b e descr ibed in t e r m s of a n u m b e r of c o m m o n charac te r i s t i c s , inc luding
phys ica l charac te r i s t i c s , pe r fo rmance cha rac te r i s t i c s , oper a t iona l cha rac te r i s t i c s , a n d " c o s t " cha rac te r i s t i c s .
I n t h e so lu t ion identif icat ion process , cos t cha rac te r ist ics a re n o t of in te res t . T h e concern is w h e t h e r or no t a possible c o m b i n a t i o n of devices m e e t s t h e r e q u i r e m e n t s of a mission. T h e p rac t i ca l i t y of a n y feasible solut ion is assessed secondar i ly . I n a sense, o p e r a t i o n a l cha rac te r istics also a r e seconda ry t o t he ques t i on of feasibili ty since t h e y re la te t o t h e tac t i ca l p r a c t i c a l i t y of feasible solut ions.
F o r feasibil i ty t e s t i n g , t h e ha rdAvare charac te r i s t i cs of
in te res t a r e p h y s i c a l a n d pe r fo rmance c h a r a c t e r i s t i c s . A family of h a r d w a r e m a y b e defined as a g r o u p of devices Λvhich e x h i b i t s s imi la r r e l a t i o n s h i p s a m o n g t h e i r p h y s i c a l a n d pe r fo rmance charac ter i s t ics in t h e e n v i r o m n e n t s Avi th in w^hich t h e y a r e designed t o ope ra t e .
The Ballistic Projectile Family
Some ev idenee of t h e existence of b r o a d families of h a r d w a r e is deve loped he re by t h e h o m o g e n e o u s t r e a t m e n t of all surface- to-surface ballist ic pro jec t i les . These r ange from smal l a r m s project i les t o m e d i u m range mi s siles and rocke t s . I n defining family g rouphigs—before t h e ques t ion of t i m e p e r f o r m a n c e per se is i n t r o d u c e d — i t will become e v i d e n t t h a t m a n y in te res t ing a n d useful d a t a a re genera ted ΛΥΙΙΙΟΙΙ h a v e o the r app l i ca t i ons w i th in t h e solut ion ident i f ica t ion process .
I n th is sec t ion , t h e re la t ionship a m o n g t h e physical a n d pe r fo rmance charac te r i s t ics of bal l is t ic project i les is examined.^ D a t a Avere assembled for a s m a n y project i les as possible from unclassified sources. Subc lasses of ba l listic project i les a r e rep resen ted for t h e foUoAving w e a p o n t y p e s :
1) Smal l a r m s : p is to l , r i f l e , carbine, m a c h i n e g u n 2) Tvibe a r t i l l e ry : guns , howitzers , t a n k g u n s 3) M o r t a r s 4) M u l t i p l e r o c k e t l aunchers 5 ) Recoilless rifles 6) Spigot p r inc ip le w e a p o n s {e.g., rifle g r enades ) 7) S S M S and R o c k e t s
8) H a n d - h e l d r o c k e t launchers
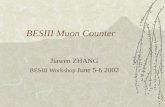
I n Fig. 2, s a m p l e r o u n d d i ame te r s of t h e a b o v e p r o jecti le t y p e s w e r e p l o t t e d aga ins t c o m p l e t e r o u n d weigh ts ( launch w e i g h t s ) . T h e l a t t e r p a r a m e t e r inc ludes the combined w e i g h t of p a y l o a d , p ro p e l l an t a n d s t r u c t u r e . W i t h the e x c e p t i o n of sp igot class Aveapons a n d m o r t a r s , Avith the i r l a i o w n off-design geomet ry , t h e d a t a for all projecti les, r ega rd less of t y p e , fall w i t h i n a n a r r o w b a n d . T h i s b a n d descr ibes a c o n s t a n t 4 t o 1 r a t i o of change i n w^eight t o d i a m e t e r t h r o u g h o u t the s p e c t r u m . T h e va lue of t h i s d isplay l ies in i t s provis ion of a c o n v e n i e n t convers ion ra t io p e r m i t t i n g d i a m e t e r or l a u n c h w e i g h t t o be used in t e r changeab ly t h r o u g h o u t t h e r e m a i n i n g d a t a d isplays . Moreover , t h e s e d a t a represen t t h e first c l ue t h a t al l of these project i le t y p e s a re p a r t of a single gener ic grouping .
2 It should be noted that balhstic projectiles are included in the functional category of motive devices.

1964 Rubin and Hilchman: Counler-GueriUa Warjare 67
Fig. 2.
SMALL ARMS AND Al.'TOMAnC .%tAFC-.3
SPIGOT PRirJClPLE AND MIGh< . Ε LCC Γ ·
TUBE ARTiLLE»Y Α.ΝΟ MORTARS
bALLISTIC SSm
COMPLETE ROUND WEIGHT (IbO IOC
0 OIL O.OCl 0.01 0.1 1 IC 100 1000 1 « lo" 1 X ΙΟ'Ί . lO''! . 10'
PAVLOAD / MAXIMUM RANGE (Un - Wm)
Fig, 3.
Ballistic Projectile Perjonnance: F o r t h e s a m e p r o ject i les , F ig . 3 shoAvs t h e r e l a t i onsh ip be tween r o u n d we igh t a n d p a y l o a d t i m e s m a x i m u m useful r ange . I t is w o r t h n o t i n g t h a t t h e l a t t e r p a r a m e t e r is a s t a n d a r d transport system m e a s u r e of p r o d u c t i v i t y . Hence , some ev idence is sugges ted t h a t al l m i l i t a r y s y s t e m s a re i ndeed t r a n s p o r t sy s t ems . I n F ig . 3 , t h e d a t a a r e a r r a y e d ove r e leven o rde r s of m a g n i t u d e h o r i z o n t a l l y a n d seven v e r t ica l ly . T h e un i fo rmi ty of t h e d a t a is a p p a r e n t , a n d four d a t a subg roup ings h a v e a p p e a r e d . S o m e i m p o r t a n t lessons e m e r g e w h i c h a r e w o r t h n o t i n g .
Apparent Limit: W i t h h i t h e c u r r e n t s t a te -o f - the -a r t for ba l l i s t ic project i les , t h e r e a p p e a r s t o be a l imit t o t h e p r o d u c t i v i t y a t t a m a b l e p e r u n i t l a u n c h weigh t . T h i s l imi t is r e p r e s e n t e d in F i g . 3 b y t h e cu rve d r a w n t a n g e n t t o t h e b a n d s r e p r e s e n t i n g smal l a r m s a n d t u b e ar t i l lery ( m a t u r e technologies) a n d e x t e n d e d i n t o t h e w e i g h t / p r o d u c t i v i t y reg ion p e r t i n e n t t o S S M . T h i s l imi t m i g h t be d u e t o t h e n e t effect of t h e i n t e r a c t i o n am-ong t h e followmg fac tors :
1) Al l project i les fly a ze ro lift t r a j e c t o r y t h r o u g h a re la t ive ly u n i f o r m p h y s i c a l e n v i r o n m e n t , t h e lower a t m o s p h e r e .
2) Al l project i les a r e p rope l l ed b y chemica l m e a n s a n d a r e un i formly d e p e n d e n t o n t h e ene rgy in t h e chemi cal bond .
3) All project i les a r e p r o d u c t s of t h e c u r r e n t ma te r i a l s s ta te-of- the-ar t Avh ich aifects t h e i r dens i ty and , perhaps m o r e i m p o r t a n t l y , the i r geomet ry .
Penalty jor Off-Design Concepts: I n th i s d i sp lay , t h e sp igot prmciple a n d h igh veloci ty projec t i le b a n d shoAvs i-elatively poor pe r fo rmance . T h i s b a n d is a q u a n t i t a t i v e descr ip t ion of t h e loss in p r o d u c t i v i t y suifered in o rder to achieve a special effect. T h e h igh veloci ty a r m o r piercing projecti le, for example , sacrifices efficienc}^ for accu racy a n d p ene t r a t i ng poAver; t h e spigot pr inciple Aveapon sacrifices p r o d u c t i v i t y for t h e t ac t ica l a d v a n t a g e of using a small bo re l aunche r r e l a t ive to w a r h e a d size. T h e e x t e n t of t hese off-design pena l t i e s is approximatel} ' ' a n o r d e r of m a g n i t u d e , c o m p a r e d t o t h e p r o d u c t i v i t y of t u b e ar t i l lery a n d m o r t a r projec t i les of equ iva l en t l aunch weight .
SSM technology: F o r t h e ball ist ic missile, cu rves are a r r a y e d chronological ly i n t e r m s of t h e a d v a n c i n g technology. These d a t a sugges t t h a t S S M s of t h e 1960 s t a t e -o f - t h e - a r t a l ready a r e p ress ing close t o t h e a p p a r e n t l imit f o r projectiles based on chemica l p ropu l s ion a n d p r e sen t mate r ia l s . I n t h e l igh t of t h i s fact, a ques t ion ar ises concern ing t h e u l t i m a t e u t i l i t y of seekmg marg ina l gains in p r o d u c t i m p r o v e m e n t for t h i s subclass of missiles. I t Avould b e in teres t ing t o p u r s u e t h i s ques t ion , t o expla in t h e a p p a r e n t l imit , a n d t o d e t e r m i n e w a y s t o ove rcome t h e l imi t ing barr ier .
Capability Gap: I n t h e region betAveen 0 . 5 a n d 8.0 p o u n d s in l a u n c h w e i g h t a n d t h e co r respond ing p r o d u c t i v i t y range of f rom 0 . 5 t o 20.0 p o u n d - k i l o m e t e r s t h e r e a p p e a r s t o b e no c u r r e n t capab i l i ty a p p r o a c h i n g t h e a p p a r e n t Imii t . T h i s gap is in t h e reg ion of large cal iber (0.7 — 2 .5 in) d i r ec t s u p p o r t Aveapons a n d t h e absence of such a capabi l i ty f o r sur face based w e a p o n s is s o m e w h a t surpr is ing.
Proposal Yardstick: A m o r e sub t l e app l i ca t i on of d a t a a r r a y s of th i s t y p e is w o r t h no t ing . T h e a p p a r e n t l imit l ine can be used as a y a r d s t i c k aga ins t wh ich t h e m e r i t of proposed ideas m a y be qu ick ly m e a s u r e d . A n y p u r p o r t e d ball ist ic pe r fo rmance signif icantly m excess of t h e indic a t e d Ihnit should be exp lanab le m t e r m s of t h e paraTiieters identified. I n t h i s app l i ca t ion , such d i sp lays become useful too ls for decision m a k e r s .
Conversion to Time of Flight: I n l ine Avith t h e object ive of gene ra tmg gener ic t h n e profiles, i t should be p o m t e d o u t t h a t a s e c o n d a r y absc i ssa m a y be a d d e d t o F ig . 3, g ivmg t ime of flight for t h e m a x i m u m useful r anges i n d i ca ted . T i m e of flight is o n e of t h e c o m p o n e n t s of t h e comp le t e profile of a w e a p o n sy s t em e m p l o y i n g a ball ist ic project i le . T h i s is t h e p o t e n t i a l connec t ing l ink be tween F ig . 3 and t h e concep t of mobi l i ty . T h e o the r " p a y o f f s " of t h e display h a v e b e e n e m p h a s i z e d he re mere ly t o ind ica te t h e addi t iona l benefits of work ing a t t h e level of aggregat i o n pe r t inen t of feasibi l i ty tes t ing .
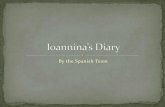
Ballistic Weapon Rate of Fire: F ig . 4 p re sen t s ball ist ic project i le d a t a for a n o t h e r p e r t i n e n t pe r fo rmance p a r a m eter , sus ta ined r a t e of fire. R o u n d d i a m e t e r is t h e p a r a m e t e r of t h e o r d m a t e . R a t e of fire is a t i m e per form-

6S IEEE TRANSACTIONS ON ENGINEERING MANAGEMENT June
S P I G O T PRINCIPLE
S I N G L E FIRE
S E M I - A ' J T O M A T I C
AUTOM; iT IC
Ό 0001 0 001 0.01 C . l 1 10 100 SUSTAINED RATE O F FIRE (fd$ mlo)
Fig. 4.
O N E M A N
MULT I-ίΛ A Ν
U N A 9 M G R E D
L IGHTLY ARMORED
HEAVILY ARMORED
oi
<
lOC ICOO 1 X 10 1 10 1 ' 10 1 X
5ELF PROPELLED LAUNCHER v.EIGHT (lbs)
Fig. 5.
ance c o m p o n e n t like t i m e of flight hi F ig . 3. I t is i nd i ca t ive of cycling r a t e s for Aveapons a t t a c k i n g t a r g e t s w h i c h requ i re mul t ip les of r o u n d s t o achieve a des i red efi*ect.
A l t h o u g h n o t p e r t i n e n t t o t h e ques t ion of mob i l i t y , once a g a m in te res t ing facts become q u a n t i t a t i v e l y explici t . T h e project i les form a different set of s u b g r o u p i n g s a n d a re a l igned as a funct ion of a u t o m a t i c i t y of fire. T h e categories a re a u t o m a t i c , s emi -au toma t i c , a n d single fire, w^hich refer t o t h e firing m o d e of t h e l aunche r . Sp igo t p rmc ip i e w'eapons a re in t h e single fire ca t ego ry b u t t h e y exh ib i t a lower r a t e of fire for a g iven bore d i a m e t e r (which is n o t su rp r i smg) .
A significant design po in t occurs a t a b o u t 5 inches in project i le d iamete r ( approx ima te ly 20 p o u n d s l a u n c h w e i g h t ) . A t th i s po in t , all w e a p o n s r eve r t t o t h e single-fire m o d e a n d r a t e of fire falls off r ap id ly w i t h f u r t h e r increases in r o u n d d i ame te r .
Influence of Launcher Weight: F ig . 5 sho\vs t h e influence of r o u n d d i ame te r o n t h e weigh ts of selfpropelled project i le l aunchers . I t should be n o t e d t h a t l a u n c h e r w e i g h t is re la ted to t h e t i m e pe r fo rmance profile i n t e r m s of t h e efficiency w i t h wh ich surface vehic les c a n t r a v e r s e t h e n envirormient , mc lud ing r a t e of speed . W h e n t h e feasibil i ty t e s t is m a d e betw^een mi l i t a ry ac t iv i t i e s a n d t h e m a n y v a r i a n t s of surface e n v i r o m n e n t t o d e t e r m i n e t h e e n v h o n m e n t a l l imits for m i l i t a r y miss ions , t h e Aveapon l aunche r we igh t has a d i rec t bea r ing o n t h e n app l i cab i l i ty .
M a n is inc luded in t h e d i sp lay a s a self-propel led l a u n c h e r for w^eapons r a n g i n g from smal l a r m s t o l igh t m o r t a r s . T h e d a t a for t h e h u m a n self-propelled l a u n c h e r
d iv ide in to t w o b a n d s , single m a u - c a i - r ied Aveapons, a n d w e a p o n s b roken d o w n for m \ d t i - m a n p a c k i n g . I n b o t h cases, t h e l auncher weigh t d o m i n a t e s s ince m a n ' s pay load t o gross w^eiglit ra t io is k e p t as low as possible t o p e r m i t m a x i m u m maneuAXM* a n d e n d u r a n c e .
T h e self-propelled launchers for heav ie r weapons fall i n to t h r e e groups , based o n t h e a m o u n t of pass ive p ro tec t ion , or a rmor , bui l t i n to t h e l a u n c h e r . T h e s e groupings , as ind ica t ed in t h e figure, a r e u n a r m o r e d ( S S M launchers ) , lightl.y a rmored (gun carr iages) , a n d h e a v i l y a rmored ( t anks ) .
I t is m o s t a p p a r e n t from t h e s e d a t a t h a t fur ther increases in t h e caliber of t a n k Aveapons c a n be ob ta ined only a t unaccep tab l e cost h i l a u n c h e r Aveight . F o r t yp i ca l t a n k morpho logy a n d a r m o r p r o t e c t i o n t h e five-inch gun a p p e a r s t o be t h e largest feasible Aveapon.
I n t e r m s of t h e degree of pas s ive p r o t e c t i o n requ i red for each, t h e d a t a clearly show t h e l a iu i che r Aveight a d v a n t a g e of t h e missile over t h e gun a t a n y r o u n d d i a m e t e r . H o w ever , F ig . 5 masks t h e ques t i on of pro jec t i le we igh t a n d t h e a m m u n i t i o n resupp ly p r o b l e m re la t ive t o missiles a n d guns . B u t t h e d a t a d o p r o v i d e ins igh t i n to t h e feasible m e a n s t o br ing fire power t o b e a r in e n v i r o n m e n t s Avhich will n o t p e r m i t passage of g u n t y p e Aveapons . F o r example , a self-propelled 8-inch missile l a u n c h e r we ighs approx i m a t e l y Ih t o 10 t o n s w^hile t h e self-propel led 8-inch gun or hoAvitzer Aveighs on t h e order of 50 t o 70 t o n s . T h i s leaves
l i t t le d o u b t t h a t for equ iva l en t ca l iber t h e ope ra t i on of t h e missile l auncher ΛΥΙΙΙ be feasible ove r a Avider r ange of e n v i r o n m e n t a l condi t ions .
I n t h i s section, samples h a v e b e e n g iven of t h e t y p e s of re su l t s a t t a i n a b l e b y t r e a t h i g h a r d w a r e in generic t e r m s . T h e displaj^s Avere p r e p a r e d Avith t h e folloAving goals in m i n d :
1) t o identify t h e n a t u r e a n d e x t e n t of t h e ball ist ic project i le family,
2) t o begin t h e de r iva t i on of t h e c o m p o n e n t e lements of t i m e pe r fo rmance for t h e Aveapon s u b s y s t e m s of comple te mi l i t a ry s y s t e m s ,
3) t o ind ica te some of t h e f o r t u i t o u s lessons associa ted w d t h t h e d e v e l o p m e n t of d a t a for so lu t ion identifica t ion .
T h e un i fo rmi ty of p e r f o r m a n c e d i sp l ayed for t h e Avide r a n g e of ballistic project i les l e n d s s u p p o r t t o t h e a rgu m e n t t h a t t h e n u m b e r of gener ic classif icat ions in to Avhich mi l i t a ry hardw^are devices fall i s n o t la rge . T h i s is a n h n p o r t a n t p recondi t ion t o e s t ab l i sh t h e usefulness a n d workab i l i t y of these tools .
Time-Perjormance Data
All h a r d A v a r e devices c a n be desc r ibed in t e r m s of t h e i r cycl ing t i m e , t h a t is, in t e r m s of t h e t i m e c o n s u m e d in each funct ion as t h e y per form a t a s k . T h e t o t a l t i m e consumed b y a device in cycl ing is e q u i v a l e n t t o i t s t h n e pe r fo rmance . T h e cycling t i m e of a s y s t e m of h a r d w a r e devices is s imply t h e s u m of t h e t u n e p e r f o r m a n c e s of t h e c o m p o n e n t devices.

19CU Rubin am! 11 itch man: Counter-Guerilla Warjare 09
T i m e cyclinp; d a t a for comple t e w e a p o n s y s t e m s luiv(^ n o t y e t been examined . H o w e v e r , representat i \^e d a t a o n c o m p o n e n t pe r fo rmance l iave been assembled for i l lustrat i v e purposes . I n i M g . 6, d a t a r e p r e s e n t a t i v e of t i m e -cycl ing for Aveapon s y s t e m s cen te red a r o u n d ballistic project i les a r e disp layed . A \^ariety of d a t a - g a t h e r i n g sources , in format ion rec ip ients , a n d levels OF c o m m a n d , con t ro l a n d c o m m u n i c a t i o n s a r e sliOAvn. BetAveen each p a i r of co lunms is i nd ica t ed A r ep re sen t a t i ve t i m e c o n s u m p t ion , in hou r s , for t h e ind ica ted funct ions . T h e m a n e u v e r c o l u m n is left b l a n k for s impl ic i ty , i nd ica t ing t h a t all Aveapons a re p re su rveycd a n d i n firing pos i t ion .
N o t e t h a t t h e ho r i zon ta l s u m s of t h e t i m e e lements in t h e figure a re r ep re sen t a t i ve of t o t a l t i m e pe r fo rmance for c o m p l e t e sys t ems (\vithin t h e cons t r a in t s of t h e d a t a ) . T h e flexibility of s u c h a n a r r a y of d a t a s h o u l d ηοΛν b e OAddent, as all possible c o m b i n a t i o n s of t h e s u b s y s t e m e l emen t s i n to sys t ems m a y be considered for t he i r effect o n t i m e cycling.
The Time-Performance Profile
D a t a from Fig. 6 a re displa^^ed g raph ica l ly in Fig . 7 for t h e purpose of i l lus t ra t ing t h e t i m e p e r f o r m a n c e of select e d sys tem combina t ions a n d of h id ica t ing t h e re la t ionsh ips of these d a t a t o t h e so lu t ion ident i f ica t ion process . T h e figure i l lus t ra tes t h e c u m u l a t i v e e lapsed t i m e in t h e s y s t e m cycle. T h e t o t a l s , o r t h e i n t e r cep t s of t h e curves w i t h t h e r i gh t -hand axis, a re t h e va lues Avhich a r e to b e c o m p a r e d w i t h t i m e r e q u i r e m e n t s g e n e r a t e d b y those miss ions for Avhich t h e s e s y s t e m s a re c o m p e t i t o r s . S y s t e m s Avhose t o t a l cycling t imes a re shor te r t h a n t h e mission r e q u n e m e n t , are mobi le ; s y s t e m s Avhose c y c h n g t imes a r e longer t h a n t h e miss ion r e q u i r e m e n t a r e n o t mobi le .
F ig . 8 presen t s t h e same d a t a in a g g r e g a t e d form as a func t ion of A r m y o rgan iza t iona l echelons. Add i t i ona l d a t a o n ballistic AVEAPONS p r i m a r y t o Corps , A r m y , a n d T h e a t e r echelons h a v e been a d d e d t o ex tend t h e r ange of t h e disp lay .
T h e t o t a l cycle t i m e for those w e a p o n s w h i c h are t h e p r i m a r y source of firepoAvor for each eche lon ( thus d i s t ingu i sh ing each echelon f rom t h e n e x t loAver echelon) a r e t h e b o u n d s t o t h e b a n d of d a t a . I n t h e case of t h e " c o m p a n y , " for example , t h e r a n g e from 1 t o 5 m i n u t e s descr ibes t h e cycling t imes in F ig . 6 for m o r t a r s a n d l igh t t u b e ar t i l le ry . T h e s e Aveapons d is t inguish t h e c o m p a n y from t h e indiv idual soldier Avhose primar^^ Aveapons a r e smal l a r m s .
I t is significant t o n o t e t h a t t h e Aveapons of e a c h o rgan i za t iona l echelon a r e p e r t i n e n t only t o t a r g e t s t h a t h a v e t u n e s tab i l i ty equa l t o or g rea te r t h a n w e a p o n s y s t e m cycl ing t imes . T h i s m e a n s t h a t t h e div is ion ' s p r i m a r y w e a p o n sys tems a re c u r r e n t l y useful (mobile enough) on ly for a t t a c k i n g t a r g e t s w h i c h h a v e t i m e s t ab i l i t y equal t o OR g rea ter t h a n 1 t o 5 h o u r s . Since these d a t a r ep resen t op thn i s t i c , " p r o v i n g g r o u n d " condi t ions , a n d a s s u m e t h a t a l l weapons a re in POSITION a n d r e a d y t o fire, t h e mobi l i ty of t h e s e w e a p o n s y s t e m s a p p e a r s t o be Ιολν indeed FOR many-t a r g e t s AVITHIN division cognizance .
SOURCE OF DATA
VISUAL
SOLDIER
OPTICAL
PHOTO
RECIPIENT OF INFORMATION
r.VEAPON COGNIZANCES
WEAPONS COMMAND, CONTROL, AND
COMMUNICATION (FIRE REQUEST, DECISION,
ORDER)
COMPANY 0.25
- SMALL ARMS AND I AUTOMATIC WEAPONS I
MORTARS AND LIGHT TUBE ARTILLERY
MEDIUM TUBE ARTILL£RY —
SSM-OIRECT SUPPORT •
•ΛΈΑΡΟΝ DELAY TIME
0.01
0.01
FIG. G- -Siiinplc time-proiile data—i)alli.stic vakios of time in hours weapon
) systems. (All
OPIICAL, DIVISION, ^ [DUJ ^ arty/ssm
AIR RfCCt, DIVISION MEWUM ARTy/SSM 1
.'ISUAl, COM;-AfJV/8G, MQPTAR', - MEDIUM ARTY
ISUAl, SOLDIER. ISMALl ARMS
DATA GATHERlrJG. COMMAMO, CONTROL WfAPONDElAY PROCESSING, ΛΜΟ AMD '"OMMUNICAIION TIMi COMMUNICAIION (FIRt RIOUEST, DECISION TO RECIPIENT ORO(R)
Fig. 7—Sample systems-time profiles.
TIMI OF FLIGHT
— —
AI L V/fAPONS 'REPOSmCN D ^
— - — - —
— —
1
SOintfR COMPANY BO DIVISION CORPS ARMY THEATER
Fig. 8—Time performance related to organizational level.

70 IEEE TRANSACTIONS ON ENGINEERING MANAGEMENT June
T H E MISSION'
T h e choice of a sample mission to d e m o n s t r a t e t h e solut ion ident i f ica t ion process Avas based on t h e following cri teria:
1) A t ime-sens i t ive mission t o emphas ize t h e concep t s of mob i l i t y .
2) A se l f -conta ined mission, i.e,, r equ i r ing few l imi t ing a s s u m p t i o n s .
3) A miss ion of top ica l in teres t .
Coun te r guerr i l la warfare is such a mission. I t is n o n -l irepower o r i en ted a n d , if a trade-off does exist be tween firepoAver a n d mobi l i ty , t h e emphas i s is on mobi l i ty .
T h r e e m a j o r counter -guerr i l la s t ra teg ies exist .
1) Alilitar}^ a c t i o n a) self-defense b) seek o u t a n d des t rov
c) r e a c t i o n
2) Po l i t i ca l a c t i o n
3) E c o n o m i c ac t ion]
\ f as t -ac t ing b u t t e m p o r a r y solut ions
\ sloAV- to-act b u t long- las t ing solut ions
In t e r m s of n a t i o n a l pos tu re , pol i t ical a n d economic measures a r e v i t a l in f o s t e r i n g condi t ions Avh ich d e n y guerrilla m o v e m e n t s t h e popu l a r s u p p o r t r equ i red to r e main v i ru l en t . T h e s e measures , hoAvever , t a k e t i m e t o i m p l e m e n t before t h e y are effective. M i l i t a r y ac t i on is t h e s topgap Avh ich p r o v i d e s this t i m e b y forcefully cont ro l l ing the guerr i l la t h r e a t .
Of t h e t h r e e c o m p l e m e n t a r y ni i l i ta ry s t ra tegies for conduc t ing counte r -guer r i l l a Avar fa re , self-defense is n o t mobi l i ty o r i en t ed b u t is more neai- ly equ iva len t t o t a r g e t ha rden ing . T o seek-ou t and d e s t r o y guerr i l las is a s t i ' a tegy cri t ically d e p e n d e n t o n locat ing a n d ident i fying t h e enemy , a classic in te l l igence p rob lem. O n t h e o the r hand , t h e s t r a t e g y of r e a c t i o n t o guerri l la ac t ions is ve ry m u c h mobi l i ty o r i en ted . I t reduces t h e m a g n i t u d e of t h e in te l ligence p r o b l e m , for in m a n y ac t ions t h e guerri l la is b o t h self-locating a n d self- identifymg. F o r t h e s e reasons t h e focus is o n t h e m i l i t a r y coun te r guerri l la r eac t ion s t r a t e g y . T h e miss ion is impl ic i t hi t h e s t a t e d s t r a t egy , t o b r i n g mi l i t a ry force t o b e a r aga ins t guerr i l las d u r i n g t h e per iod t h a t t h e i r pos i t ions a n d ident i t ies a re revea led b y then-hosti le ac t ions .
Mission Requirements jor Mobility
T h e miss ion r e q u h e m e n t for mob i l i ty is t h e t i m e ava i la ble for c o u n t e r forces to reac t . T h i s t i m e in te rva l is a comb ina t ion of t h r e e fac tors .
1) T h e a m o u n t of ear ly A v a r n i n g of i m p e n d i n g guerr i l la a t t a c k .
2) T h e t i m e i t t a k e s for t h e guerr i l la t o achieve his ob jec t ive once h e a t t a c k s .
3) T h e t i m e consumed b y t h e guerr i l la in w i t h d r a A v i n g or othei-wise " d i s a p p e a r i n g " from t h e scene of t h e a t t a c k .
If ta is r ep re sen ted as react ion time ava i l ab le t o c o u n t e r forces, t h e n
L = + +
Avhere /,, = ear ly w a r n i n g t ime // = t a r g e t life, or a t t a c k d u r a t i o n (guerr i l la \ v i l l n o t
a l w a y s seek a lethal objec t ive) /, = t i m e for t h e guerrilla t o AvithdraAV.
Because earl}^ w a r n i n g m a y be ach ieved only b y re int r o d u c i n g the intel l igence p r o b l e m in to t h i s example , i t is a s s u m e d t h a t n o n e is ava i lab le a n d hereaf te r i t is ignored . I t shou ld be n o t e d however , t h a t t h e effect of ea r ly Avarn -ing is t o increase t h e a m o u n t of t i m e aA^ailable for reac t ion . F o r t h e conven ience of us ing a s imple c r i t e r ion a g a i n s t Avhich t o c o m p a r e r equ i r emen t s a n d capabi l i t ies , guerr i l la Avithdi-aAval t i m e is assumed t o be i n s t a n t a n e o u s . A t t e n t i o n there fore can b e d i rec ted toAvard t a r g e t t ime-life {ti) as t h e counter -guerr i l la miss ion mob i l i t y r e q u i r e m e n t .
T h e ident i f ica t ion of those classes of t a r g e t s wh ich a r e of v i t a l i n t e res t t o guerril las a n d t h e d e r i v a t i o n of t h e p r o b a b l e t i m e life of each of t h e s e generic t a r g e t t y p e s u n d e r guerr i l la a t t a c k Avas ach ieved by a c o m b i n a t i o n l i t e r a tu r e search a n d sunple one-s ided t h n e a n d m o t i o n t a c t i c a l games . T h e p rmcipa l fac tors influencing choice of t a r g e t s , t y p e of guerri l la a t t a c k , a n d p r o b a b l e t a r g e t t i m e life inc luded phys ica l envnOinnen t , guerr i l la s t r a t e g y a n d t ac t i c s , t y p e of secur i ty forces, a n d social a n d economic o rgan iza t i on of t h e region. I n T a b l e I , t y p i c a l guerr i l la t a r g e t s , ob jec t ives a n d raid sizes a r e s h o w n a long Avith t h e resu l t ing ranges of t a rge t l ives . T h e s e ti v a l u e s a r e t h e miss ion r e q u h e m e n t s for mobi l i ty .
T A B L E I
TAKCTP:T L I F E E X A M P L E S
Guerrilla Time-life Force Range
Target Required Objective
Individual :3-o men Kill or seriously wound 5 min. or Kill or seriously wound less
Factor}^ or ware o-lO Major damage 10-30 min. house
Major damage
Store or stock- 15-25 Loot, destroy remainder 15-60 min. age sheds
Loot, destroy remainder
Vehicles and 10-20 Drive away for use, or 15-30 min. fuel (2-10 ve destroy hicle convoys)
destroy
Ammunition δ-10 Destroy or cause major 15-30 min. and fuel damage dumps
damage
Modern bridge 3-5 Destroy or serioush- 1-4 hours.' or tunnel damage
T H E C o u N T E i i - F o i i c E SYSTEM
I t h a s b e e n es tabl i shed t h a t t h e coun te r force m u s t r eac t a n d r each a t a r g e t under guerr i l la a t t a c k A v i t h i n ti, t h e t i m e life of t h e t a rge t . I t Avas shoAvn t h a t t^, t h e t i m e ava i l ab l e t o reac t , Avas m a d e equa l t o ti b y a s s u m h i g t h a t no ear ly A v a r n i n g AA ould be ava i l ab le t o c o u n t e r forces

1964 Rubin and Hiichnian: Counler-Guerilla Warfare 71
a n d hy ignor ing t h e t i m e for t h e guerri l las t o AvithdraAV from t h e t a r g e t . T h e s e a re b o t h unfavorab le or res t r i c t ive a s s u m p t i o n s Avith respec t t o t h e counter-force.
R e a c t i o n t i m e b y itself is n o t sufficient to define t h e job t o be done . Accord ing t o t h e ear ly descr ip t ion of t h e solut ion ident i f ica t ion process t h e r e a re five funct ional r e q u i r e m e n t s wh ich descr ibe a mission. Mobi l i ty is one ; t h e o t h e r s a r e intel l igence, p a y l o a d , c o m m a n d a n d cont ro l , a n d c o m m u n i c a t i o n s . T h e s e r equ i r emen t s c a n be descr ibed briefly a s t h e y re la te t o th i s example mission.
T h e p a y l o a d r e q u i r e m e n t for t h e counte r force is t h e del ivery of a r m e d mi l i t a ry pe r sonne l t o t h e t a r g e t s i te . T h e in te l l igence r e q u i r e m e n t of t h e coun te r force is t h e knoAv ledge t h a t a n a t t a c k h a s been ini t ia ted a g a i n s t a t a r g e t . T h e c o m m a n d a n d cont ro l r equ i rement is t h e ava i l ab i l i ty of a complex of m e n a n d ha rdware devices t o accep t ancl e v a l u a t e intel l igence, select means , a n d disp a t c h forces t o t h e t a r g e t s i te . F ina l ly , t he c o m m u n i c a t i o n s r e q u i r e m e n t is t h e rece ip t of information from t a r g e t s u n d e r a t t a c k a n d con tac t w i t h a n d control of d i spa t ched forces.
T h e s e r e q u i r e m e n t s m a y be t r ans l a t ed as follows in to t h e func t ions Λνΐιΐοΐι m u s t be pe i fo rmed from t h e m o m e n t a t a r g e t is aware it is u n d e r a t t a c k , unt i l t h e m o m e n t t h e guerr i l las AvithdraAv.
1) C o m m u n i c a t i o n of a n a l a r m from t h e t a r g e t t o t h e c o u n t e r force.
2) E v a l u a t i o n of t h e a l a r m by t h e counter-force c o m m a n d a n d a l loca t ion of counter-force e l emen t s .
3) P r e p a r a t i o n of counter - force e lements t o d e p a r t . 4) T r a n s p o r t a t i o n of counter - forces t o t h e t a r g e t s i te .
Elements of the Sijstem and the Evaluation Criterion
T h e e l e m e n t s of t h e counter- force sys tem are d e d u c e d from t h e a b o v e funct ional r equ i r emen t s in t e r m s of t h e five m a j o r classes of h a r d w a r e devices defined ear l ier as compr i s ing a sy s t em.
1) D a t a ga the re r s a n d p rocessors—the h u m a n sensors of t h e ind iv idua ls u n d e r guerri l la a t t a c k .
2) Effects p r o d u c e r s — t h e mi l i t a ry personnel t o be de l ivered t o t h e target .^
3) M o t i v e dev i ce s—the m e a n s t o t r a n s p o r t m i l i t a r y pe r sonne l from c o u n t e r force locat ion t o t a r g e t .
4) C o m m a n d a n d con t ro l dev ices—the m e a n s for speed ing m f o r m a t i o n flow a n d / o r moni to r ing b o t h guerr i l la a t t a c k s i n p rogress a n d counte r force elem e n t s i n ac t ion .
5) C o m m u n i c a t i o n s dev i ce s—the m e a n s b y Λ v h i c h t a r g e t s c o m m u n i c a t e ncAvs of a t t a c k t o t h e c o u n t e r force, a n d t h e m e a n s of con t inu ing con tac t b e t w e e n c o u n t e r force c o m m a n d a n d d i spa tched e l e m e n t s .
These five-system e lemen t s influence t h e t o t a l s y s t e m i n t h e fol lowing w a y .
3 In this sample study no attention is given to the tasks of the personnel, once delivered, in terms of the ensuing close combat with the guerrilla force.
1) D a t a ga the re r s and processors—le t /.· be t h e a m o u n t of t i m e it t ake s for t h e t a r g e t t o become a w a r e i t is u n d e r a t t a c k . I n th i s example , ti is cons idered to be zero l)ecause of t he r a p i d t i m e response of h u m a n ( la ta ga the re r s and processors .
2) Effects p roducers—le t t, be t h e t i m e i t t a k e s af ter deli\^ery for t h e pay load t o p r o d u c e t h e desired effect on t h e guerri l la . Again , t, is cons idered t o be zero since t h e only effect desired is to del iver forces t o t h e t a r g e t a rea .
3) M o t i v e devices—let /./ r ep re sen t t h e s u m of p re -d e p a r t u r e de lay t ime inhe ren t in t h e m o t i v e device a n d t h e t i m e consumed en rou t e .
4) C o m m a n d a n d control devices—let represen t t h e t i m e consumed in t h e eva lua t ion , decision a n d order cycle of counter-force c o m m a n d .
5 ) C o m m u n i c a t i o n s dev ices—le t t^ r ep resen t t h e t i m e consumed be tween to (guerri l la a t t a c k in i t ia t ion) a n d t h e receipt of t h e a l a r m b y t h e counter- force c o m m a n d .
6) T o t a l counter-force s y s t e m — l e t t, r ep resen t t h e t o t a l t i m e consumed b y all e l emen t s of t h e counte r -force sys t em.
T h e n , b y definition,
L = ii + te + L + Ic^- + Ic^
B u t because
~ 0
a n d
t h e n
is = t, + t,. +
Smce t h e cr i ter ion selected for r eac t i on w-as t h a t ta ( t ime ava i lab le t o r eac t ) < ti ( t a rge t life), t h e n , t, < t^ < ti is t h e c r i te r ion for tes t ing t h e feasibil i ty of r eac t i on sys tems aga ins t miss ion r equ i r emen t s in o rde r t o assess mobi l i ty .
Further Simplification and Design Requirements
I n o rde r t o focus a t t e n t i o n en t i r e ly on m o t i v e devices as t h e d o m i n a n t e lement in coun te r -guer r i l l a ac t ion, a fu r the r s implifying condi t ion c a n be i n t r o d u c e d . If comm a n d , cont ro l , a n d commun ica t i ons a r e in i t ia l ly a s sumed to b e i n s t a n t a n e o u s (consume zero t i m e ) , t h e n t h e quest ion c a n be addressed: W h a t families of m o t i v e devices a re ab le t o m e e t t h e reac t ion r e q u i r e m e n t {ti) of va r ious t a r g e t s o r t a r g e t complexes u n d e r t h e s e f avorab le c k c u m -s tances? T h e answers t o t h i s ques t i on a re of t w o t y p e s .
1) All families of m o t i v e devices w h i c h c a n n o t m e e t t h i s favorable mobi l i ty r e q u i r e m e n t (in t h e absence of ear ly warning) a r e disqualif ied (no t feasible).

IEEE TRANSACTIONS ON ENGINEERING MANAGEMENT June
2) Fo r those m o t i v e devices which do m e e t t h e m o b i h t y requ i rement it is possible t o a sce r t a in t h e a m o u n t of t u n e still a \ 'a i lable [i.e., ii — t,i) for a l locat ion t o t h e combined c o m m a n d and cont ro l a n d c o m n u m i c a -t ions subsys tems . A n y such su rp lus of t h n e can be t rans la ted in to design i*equirements for these sul)-systems Avhen used in conjunc t ion w i t h t h e class of mot ive device t h a t c rea ted t h e su rp lu s time.*
H e n c e , for this example , t he dei ini t ion of sys tem t i m e per fo rmance is
L = t,
a n d t he cr i ter ion for t e s t i n g feasibili ty of t he c o u n t e r force sys tem is
Motive Device Capabililies
F o r this example , t h e counter-force sys t em ha s becMi del ibera te ly reduced to a single s u b s y s t e m , the m o t i v e device . T h e t ime, consumed by t h e m o t i v e device, tj, t h e r e fore represents the t ime-per formance profile of t h e counter-force sys t em. T h e level of effort associa ted with t h i s s t udy did not p e r m i t t h e gene ra t ion of generic families of mo t ive de\ ' ices, o t h e r t h a n ball ist ic project i les . FIoav-ever , several classes of t r a n s p o r t \^ehicles Avere cons idered a s a l t e rna t ives for t h e counter -guer r i l la sys t em. T h e s e inc luded m a n , an ima l s , l ight- a n d med ium-whee led a n d t r a c k e d vehicles, a n d fixed a n d r o t a r y Aving a i rcraf t .
Motive Device versus Environment: T h e in t e rp l ay be -tAveen mot ive devices a n d phys ica l e n v i r o n m e n t involves a n analys is of t h e d e g r a d a t i o n in m o v e m e n t - r a t e pe r formance . I n Fig . 9, a generic classification of t h e t e r r e s t r i a l physical e n v i r o n m e n t is shown in matrix: form. I n t h i s s tudy , ma t r i ces of t h i s t y p e were u sed t o e v a l u a t e t h e mfluence of e n v i r o n m e n t a l condi t ions o n each surface m o t i v e device m e n t i o n e d .
I n Fig. 9, for example , d a t a for medium-Avheeled vehicles (2^ to 5 tons ) o p e r a t i n g unde r c ross -coun t ry condi t ions a r e shown. T h e m o v e m e n t - r a t e en t r i e s in t h e mat rbc reflect t he m a x u n u m expec tab le r a t e s of s u s t a m e d speed a t t a i n a b l e for each c o m b i n a t i o n of e n v i r o n m e n t a l cond i t i ons . T h e b l a n k s in t h e m a t r i x r e p r e s e n t impassab le condi t ions for med ium-whee led vehicles .
T h e s e d a t a inere ly confirm t h e k n o w n fac t t h a t wheeled vehicles h a v e l imi ted capab i l i t y u n d e r t h e e n v i r o n m e n t a l condi t ions ci ted. H o w e v e r , m o t h e r cases , i t Avas n o t e d t h a t while m o s t surface a n d a h veliicles exhibi t env i ron m e n t a l l imi ta t ions , m e n a n d a n i m a l s (wi th in the i r Ihn i t ed speed regmies) exhibi t a re la t ive ly wide r a n g e of capabi l i t ies for m a i n t a i n i n g m o v e m e n t in a d v e r s e e n v i r o m n e n t s . B y m a k i n g such d a t a explicit , t h e p r e d o m m a t i n g env i ron -
^ Note that this process also can be reversed to establish design requirements for motive devices for use with given families of command, control and communications devices.
PHYSICAL ENVIiONVENTAL FACTO«iS TEiiAIN:
PRECIPITOUS 1 DISCONTIN'JCUS »LaT TO 3CLLr,G
VEGETATION: ENSE SPi E 3 ENS ΡΛΙ»·: CENS SClV'AApR: Sa SU F SA SJ F SA SU F SA Γ SA SLl F SA S,i r
TRANSIENT CACTOS VISIBILITY WEAThES I 2 3 5 6 7 8 9 IC 12 13 '.4 15 Ii '7 IS
DARKNESS
CL£A!? TO LIGHT FGG C? WECIPiTATION
A X DARKNESS HEAVY fCG CR PRECIPITATION Β 5 10
LIGHT
CIEAR TO LIGHT FOG CH PPECIPITATION C X 5 10 10 15
LIGHT HEAVY FOG OS PRECIPITATION 0 X 10 15 15 20
SA - SATURATED S O I L SU - SUPERFICIAL EFFECTS F - FIRM
Fig. 9—Medium wheeled vehicle movement—cross countrv. (Block velocity—miles per hour.)
m e n t a l factors Avhich inh ib i t pe r fo rmance a re clearly-identified a n d des ign a t t e n t i o n can be d i r ec t ed t o overcome their r e s t r a in ing influence.
F E A s m i L r r v T e s t i n g for M o b i l i t y
T h e final s t e p in t h e so lu t ion identif icat ion process is t h e feasibility t e s t . S u c h t e s t s involve t h e c o m p a r i s o n of mission r e q u i r e m e n t s a n d s^^stem capab i l i t i e s Avithin a p p r o p n a t e o p e r a t i n g e n v i r o n m e n t s .
Single Targets
I n consider ing feasibi l i ty, i t is well t o begin Avith t h e case of single t a r g e t s . F ig . 10 represents a s u n p l e m e t h o d o logical tool Avhich c a n be used t o d e t e r m i n e t h e d i s t ance a t which e q u i p m e n t a n d m e n (counter forces) can be displaced from single t a r g e t s a n d r e spond effectively (in t ime ) w h e n a m i l i t a r y d e m a n d is p laced on t h e coun te r force sys tem. T h e s e d i sp lacement d i s t a n c e s for forces re la te u n p o r t a n t h ^ t o t h e d e t e r m i n a t i o n of a preferred force d e p l o y m e n t doc t r ine .
I n Fig. 10, t h e p a r a m e t r i c veloci ty c u r v e s co r re spond t o a n d m a y be d h e c t l y l inked t o values de r ived i n F ig . 9 a n d o t h e r s like i t . As a basis for compar ing v a s t l y different m o t i v e devices, n o t e t h a t a c u r v e is inc luded co r re spond ing t o ballistic dev ice pe r fo rmance . T h e p e r f o r m a n c e of a n y class of m o t i v e dev ices m a y be so r ep resen ted . T h e veloci ty cu rves reflect t h e n e t influence of n a t u r a l phys i ca l env i ronmen t , m a n - m a d e a l t e r a t i ons a n d t r a n s i e n t vis ibi l i ty a n d Aveather fac to r s .
F o r a n y class of m o t i v e devices t h e m a x i m u m displacem e n t d i s t ance froi.T t a r g e t locat ion c a n be de t e rmined readi ly from t h e abscissa for any g iven t a r g e t life (ti) selected from t h e o r d i n a t e . I n t he e x a m p l e show^i on Fig . 10, if a t a r g e t of in t e re s t has a ti of 25 m h i u t e s , a n d if a mot ive device is ava i l ab le having a 4 0 - m p h capab i l i ty over local e n v i r o n m e n t a f te r a o-minute dela3^, t h e maxi m u m d i sp lacemen t d i s t a n c e of counter forces so m o u n t e d is a b o u t 13 miles from t h e t a rge t .
A t th is j u n c t u r e , t h e choice of c o n s t r a i n t s s u r r o u n d i n g t h e definition of t h e counter- force s y s t e m becomes a p p a r en t . Fo r example , if a counter-force base loca t ion is fixed, t h e n for all t a r g e t s covered b y the base t h i s s imple p r o cedure allows t h e select ion of a preferred m o t i v e device or devices for reac t ion . Similar ly, des ign b o u n d a r i e s for

1964 Biihin and Hitchman: Coiinier-Gnerilla Warjare 7 3
9 ?oA
70 30 40 50
M O V t M t N T DISTANCE (miles)
Fig. 10—Time, distiincc, onviroamerit and performance functions for reaction systems against single targets.
t h e c o m m a n d , con t ro l and c o m m u n i c a t i o n s s u b s y s t e m s c a n be es tab l i s l ied repea ted l3^ T h e i n t e g r a t i o n of such resul ts t h e n ^deld a prefer red force mix .
I t m i g h t be no t ed f rom Fig . 10 t h a t t h e s t i pu l a t ed m o t i v e dev ices for t r a n s p o r t i n g pe r sonne l t o t h e t a r g e t a r e a m a y n o t be feasible (not mobi le) in some cases, m d i c a t i n g t h a t o the r m e a n s migh t b e useful, such as t r a n s p o r t i n g w a r h e a d s b y ball ist ic devices w h e r e ti is v e r y sho r t . T h e figure shoAvs t h a t t h e l a t t e r devices can be displaced a t g r e a t d i s t ances for shor t t a r g e t lives, a n d a re appl icab le p r o v i d i n g i n h e r e n t p r e l a u n c h dela^^'s a re no t p roh ib i t ive .
Multiple Targets: T h e m u l t i p l e - t a r g e t case bui lds fur ther u p o n t h e e l emen t s a l r eady discussed a n d in t ro duces cons ide ra t i ons of t a r g e t d i s t r ibu t ions , va r i ab l e t a r g e t lives, a l t e r n a t i v e m o t i v e devices a n d va r i ab l e phys ica l e n v i r o n m e n t s . Whi l e t h e ind ica t ed o u t p u t s of t h e smgle t a rge t case p r o v i d e h is ights for t h e des ign of h a r d w a r e , cons idera t ion of mul t ip le t a r g e t s can b e sho\vn t o yield in fo rmat ion r e l a t ive t o force s t r u c t u r e a n d d e p l o y m e n t s for coun te r guerr i l la forces.
Analysis of Variables: T a r g e t d i s t r i bu t i on a n d i t s m-fluence o n force s t r u c t u r e a n d on t h e loca t ions of comi te r force bases is t h e d o m i n a n t e l emen t m t h e mu l t i p l e - t a rge t mission a n a l y s i s . T h e t h r e e usua l t y p e s of t a r g e t d is t r i bu t ions a r e cons idered—uni form, l inea r a n d c lus tered. These d i s t r i b u t i o n s possess t h e folloΛvmg charac te r i s t i cs :
1) U n i f o r m — t a r g e t s a r e relativel}^ spa r se a n d uni form ove r a n u n c o n s t r a i n e d a rea .
2) L i n e a r — t a r g e t s a re general ly cons t r a ined m one d i m e n s i o n of t h e t a r g e t a rea .
3) C l u s t e r e d — c o n s t r a i n t s m two d imens ions d o m i n a t e
these t a r g e t d i s t r i b u t i o n s resu l t ing in t a r g e t c lus te r s a b o u t a smgle p o i n t wdthin t h e t o t a l t a rge t a r e a .
I n general , these t h r e e d i s t r i bu t ions can be recognized in a n y complex of p o t e n t i a l t a rge t s . T h e y a r e i l lus t ra ted in F ig . 11 w h e r e d i s t r i bu t i ons h a v e been sepa ra t ed for c lar i ty . I n a n a c t u a l s i tua t ion , t h e y could be expected t o be less c lear ly defined a n d to be often super imposed on o n e ano the r .
F o r t h e t a r g e t d i s t r ibu t ions shown in F ig . 11, if t h e e n v i r o n m e n t Λvere fixed (say, a perfect p l ane ) , and t a r g e t t i m e lives Avcre equa l , a n d only one t y p e of mot ive dev ice considered, t h e n circles of equa l r a d i u s c i rcumscr ib ing each t a r g e t would rep resen t t h e a reas Avithin which r e a c t ion forces could be effectively based . T h e d o t t e d circles in Fig. 11 enclose such regions.
I n t h e example , t h e circles do n o t over lap in t h e r eg ion of un i fo rm t a r g e t d i s t r i bu t ion ; in t h e l inear a n d c lus t e red t a r g e t regions, ove r l aps do occur. T h e s e over laps a re of p r i m e in t e res t for he re reac t ion forces, m o u n t e d in t h e mot ive device u n d e r cons idera t ion , c a n be based for suppor t of t w o or m o r e t a r g e t s . H e n c e , over lapp ing a r e a s indica te preferred loca t ions for n i a x i m u m t a rge t co\^erage and, for t h e t o t a l complex , begin t o ind ica te counte r force d e p l o y m e n t p a t t e r n s a n d force levels.
Since t h e u l t i m a t e d e t e r m i n a t i o n of base locat ion a r e a s in a n y rea l s i t ua t i on is sub jec t t o t h e var iables imposed by e n v i r o n m e n t , t a r g e t lives a n d m o t i v e device, i t s h o u l d be readi ly a p p a r e n t t h a t t h e circles g iven in the e x a m p l e Avill be a l t e r ed in s h a p e a n d d imens ion wdien var ious r e a l -Avorld c o n s t r a i n t s a r e imposed . I n t h i s s t u d y , va r ious t y p e s of m i l i t a ry \^ehicles, t e r r a in , t a r g e t d i s t r ibu t ions a n d t a r g e t l ives were a n a l y z e d a n d d i sp lays weve p r e p a r e d t o ind ica te t h e influence of t hese va r i ab les . I n F ig . 12, for example , t h e effect of v a r y i n g only t h e mix of t a r g e t t i m e lives is d i sp layed . T h i s h a s t h e effect of changing t h e r a d i i of feasible r eac t ion s u r r o u n d i n g each t a r g e t . I n F ig . 13 , bo th t a r g e t mLx a n d e n v n o n m e n t a r e .varied. T h e influence of n a t u r a l obs tac les a n d m a n - m a d e a id s t o Avheeled veh ic le m o v e m e n t a re t h e m o s t p r o n o u n c e d charac te r i s t ics i n th i s figure. Again , i n b o t h F igs . 12 a n d 13, shaded a r e a s represen t prefer red base loca t ions for mul t ip le t a r g e t coverage.
T h e foregoing c o m m e n t a r y i l lus t ra tes t h e influence of p a r a m e t e r v a r i a t i o n o n m o t i v e de \ ace feasibilitj'^ in t h e presence of m u l t i p l e t a r g e t s . F i r s t , p a r a m e t e r v a r i a t i o n effects t h e size of t h e feasible r eac t ion region s u r r o u n d i n g each t a r g e t m t h e complex , t h u s a l t e r m g t h e n u m b e r a n d size of t h e regions of ove r l app ing t a r g e t coverage, w h i c h are t h e prefer red b a s e locat ions for r e a c t i o n forces. Second , t h e shapes of t h e r eac t i on regions also a re affected a s phys ica l e n v i r o n m e n t a l va r i a t ions a r e in t roduced .
W h e n ana lyses such a s these a r e quantif ied, m s i g h t s are ga ined in to t h e feasibi l i ty of \^arious classes of m o t i v e devices a s t r a n s p o r t m e a n s for counter -guerr i l la forces. I n addi t ion , t h e a m o u n t of base loca t ion over l ap t yp i ca l of

IEEE TRANSACTIONS ON ENGINEERING MANAGEMENT June
•
/ • / /
/ /
/
/ ' ./
/ • /
/ /
. /
/
•
/ ^ ' CLUSTERiO ·
Fig. 11—Target distributions.
var ious m o t i v e devices is ind ica t ive of s l ack ' ' t i m e ΛΥΙΊΙΟΙΙ can be a l loca ted t o command , control a n d c o m m u n i c a t i o n s s u b s y s t e m s t o Avork in con junc t ion Avith t h e m o t i v e de-\dces. F r o m t h e degree of ove r l ap , mob i l i t y des ign requ i re m e n t s for t h e s e complimentar}^ s u b s y s t e m s can be de te r m m e d .
T h e genera l app roach descr ibed, in compan}'^ Avith a s u p p l e m e n t a r y set of p l ann ing tools w h i c h h a v e been der ived , p e r m i t t h e object ive of generic so lu t ion identif icat i o n to be m e t for t h e counter -guer r i l la r e ac t i on mission. All c o m b i n a t i o n s of e n v i r o n m e n t a l v a r i a t i o n s , t a r g e t d i s t r i bu t i ons a n d mot ive devices c a n b e p a r a m e t r i c a l l y assessed t o es tabl i sh t h e follo\ving:
1) T h e b o u n d s wi th in Avh ich e ach m o t i v e device is feasible (mobDe).
2) T h e c o n c o m i t a n t mob i l i ty r e q u i r e m e n t s for o the r counte r force sys tem c o m p o n e n t s ( c o m m a n d , control , a n d communica t ions ) .
3) Feas ib le m o t i v e device mix , d e p l o y m e n t p a t t e r n and force level for a n y t a r g e t complex .
F ina l ly , because a direct t r a n s l a t i o n m a y b e m a d e from t h e s e a b s t r a c t t echniques t o rea l -wor ld s i t ua t ions , t h e s a m e t e c h n i q u e s m a y be addressed w i t h g r e a t e r specificity t o a c t u a l ope ra t iona l t h e a t e r s as t h e need ar ises .
Θ CONDITIONS: •^ARCETF. - VAdlASLE TYPES MOTIVE DEVICE -
V.'HEELED VEHICLE ENvlRON'MENT FIXED
Θ / /
/ \ /
/ 1/
KEY:
I I SINGLE TARGET COVERAGE
I i TWO TARGETS COVERED
• n THREE TARGETS COVERED
Fig. 12—Coverage areas—fixed motive device and environment and variable target tyi)es.
CONDIMONS.-TAPGITS - VARIABLE TYPES MOTIVE DEVICE -
WHEELED VEHICLE ENVIRONMENT - VARAIBLE
MODERATE TERRAIN, FAIR I PACT ION, CLEAR
Fig. 13—Fixed motive device and variable targets and environment.