Phys206—ExamIIIFormulaemechanics.physics.tamu.edu/formulae/phys206-examIII-formulae.pdfTrigonometryandVectors:...
2
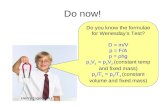
Trigonometry and Vectors: sin 30 ◦ = cos 60 ◦ = 1 2 sin 36.9 ◦ ≈ cos 53.1 ◦ ≈ 3 5 sin 45 ◦ = cos 45 ◦ = 1 √ 2 sin 53.1 ◦ ≈ cos 36.9 ◦ ≈ 4 5 sin 60 ◦ = cos 30 ◦ = √ 3 2 h adj = h cos θ = h sin φ h opp = h sin θ = h cos φ h 2 = h 2 adj + h 2 opp tan θ = hopp h adj h h opp φ θ h adj Law of cosines: C 2 = A 2 + B 2 − 2AB cos γ Law of sines: sin α A = sin β B = sin γ C B γ α C A β A = A x ˆ i + A y ˆ j + A z ˆ k ˆ A = A | A| A · B = A x B x + A y B y + A z B z = AB cos θ = A ‖ B = AB ‖ A × B =(A y B z −A z B y ) ˆ i +(A z B x −A x B z ) ˆ j +(A x B y −A y B x ) ˆ k | A × B| = AB sin θ = A ⊥ B = AB ⊥ (direction via right-hand rule) Quadratic: ax 2 + bx + c =0 ⇒ x 1,2 = −b ± √ b 2 − 4ac 2a Derivatives: d dt (at n )= nat n−1 d dt sin at = a cos at d dt cos at = −a sin at Integrals: t2 t1 f (t)dt = a n+1 (t n+1 2 − t n+1 1 ) if f (t)= at n , then f (t)dt = a n+1 t n+1 + C (n = −1) sin at dt = −1 a cos at cos at dt = 1 a sin at Kinematics: translational rotational 〈v〉 = r2− r1 t2−t1 v = d r dt 〈 a〉 = v2−v1 t2−t1 a = dv dt = d 2 r dt 2 r(t)= r 0 + t 0 v(t ′ ) dt ′ v(t)= v 0 + t 0 a(t ′ ) dt ′ 〈ω〉 = θ2−θ1 t2−t1 ω = dθ dt 〈α〉 = ω2−ω1 t2−t1 α = dω dt = d 2 θ dt 2 θ(t)= θ 0 + t 0 ω(t ′ ) dt ′ ω(t)= ω 0 + t 0 α(t ′ ) dt ′ —– constant (linear/angular) acceleration only —– r(t)= r 0 + v 0 t + 1 2 at 2 v(t)= v 0 + at v 2 x = v 2 x,0 +2a x (x − x 0 ) (and similarly for y and z) r(t)= r 0 + 1 2 (v i + v f )t θ(t)= θ 0 + ω 0 t + 1 2 αt 2 ω(t)= ω 0 + αt ω 2 f = ω 2 0 +2α(θ − θ 0 ) θ(t)= θ 0 + 1 2 (ω i + ω f )t Energy and Momenta: translational rotational K = 1 2 Mv 2 W = F · d r const −−−→ force F · Δ r P = dW dt = F · v p cm = m 1 v 1 + m 2 v 2 + ... = Mv cm J = F dt =Δ p ∑ F ext = Ma cm = d p cm dt ∑ F int =0 if ∑ F ext,x =0,p cm,x = const τ = r × F and | τ | = F ⊥ r = Fl K rot = 1 2 I tot ω 2 W = τdθ const −−−→ torque τ Δθ P = dW dt = τ · ω L = ∑ r × p = I 1 ω 1 + I 2 ω 2 + ... = I tot ω ∑ τ ext = I tot α = d L dt ∑ τ int =0 if ∑ τ ext,z =0,L z = const —– Work-energy and potential energy —– W =ΔK E tot,i + W other = E tot,f U = − F · d r ; U grav = Mgy cm ; U elas = 1 2 kΔx 2 F x (x)= −dU (x)/dx F = − ∇U = − ∂U ∂x ˆ i + ∂U ∂y ˆ j + ∂U ∂z ˆ k Constants/Conversions: g = 9.80 m/s 2 = 32.15 ft/s 2 (Earth, sea level) ≈ 10 m/s 2 ≈ 33 ft/s 2 1 mi = 1609 m 1 lb = 4.448 N 1 ft = 12 in ⇔ 0.454 kg (Earth, sea level) 1 in = 2.54 cm 1 rev = 360 ◦ =2π radians Circular motion: a rad = v 2 R a tan = d| v| dt = Rα T = 2πR v s = Rθ v tan = Rω Relative velocity: v A/C = v A/B + v B/C v A/B = −v B/A Forces: Newton’s: ∑ F = ma, F B on A = − F A on B Hooke’s: F x = −kΔx friction: | f s |≤ µ s |n|, | f k | = µ k |n| Centre-of-mass: r cm = m 1 r 1 + m 2 r 2 + ... + m n r n m 1 + m 2 + ... + m n (and similarly for v and a) Phys 206 — Exam III Formulae
Transcript of Phys206—ExamIIIFormulaemechanics.physics.tamu.edu/formulae/phys206-examIII-formulae.pdfTrigonometryandVectors:...

Trigonometry and Vectors:
sin 30◦ = cos 60◦ = 1
2sin 36.9◦ ≈ cos 53.1◦ ≈ 3
5
sin 45◦ = cos 45◦ = 1√2
sin 53.1◦ ≈ cos 36.9◦ ≈ 4
5
sin 60◦ = cos 30◦ =√3
2
hadj = h cos θ = h sinφ
hopp = h sin θ = h cosφ
h2 = h2adj + h2
opp
tan θ =hopp
hadj
hhopp
φ
θ
hadj
Law of cosines: C2 = A2 +B2 − 2AB cos γ
Law of sines:sinα
A=
sinβ
B=
sin γ
C
Bγ
αC
A
β
~A = Axi+Ay j +Az k A =~A
| ~A|~A · ~B = AxBx +AyBy +AzBz = AB cos θ = A‖B = AB‖
~A× ~B = (AyBz−AzBy )i+ (AzBx−AxBz)j + (AxBy−AyBx)k
| ~A× ~B| = AB sin θ = A⊥B = AB⊥ (direction via right-hand rule)
Quadratic:
ax2 + bx+ c = 0 ⇒ x1,2 =−b±
√b2 − 4ac
2aDerivatives: d
dt (atn) = natn−1
ddt sin at = a cos atddt cos at = −a sin at
Integrals: ∫ t2t1
f(t)dt = an+1
(tn+1
2 − tn+1
1 )if f(t) = atn, then
{
∫
f(t)dt = an+1
tn+1 + C(n 6= −1)
∫
sin at dt = −1
a cos at∫
cos at dt = 1
a sin at
Kinematics:translational rotational
〈~v〉 = ~r2−~r1t2−t1
~v = d~rdt
〈~a〉 = ~v2−~v1
t2−t1~a= d~v
dt =d2~rdt2
~r(t) = ~r0 +∫ t
0~v(t′) dt′
~v(t) = ~v0 +∫ t
0~a(t′) dt′
〈ω〉 = θ2−θ1t2−t1
ω = dθdt
〈α〉 = ω2−ω1
t2−t1α= dω
dt =d2θdt2
θ(t) = θ0 +∫ t
0ω(t′) dt′
ω(t) = ω0 +∫ t
0α(t′) dt′
—– constant (linear/angular) acceleration only —–
~r(t) = ~r0 + ~v0t+1
2~at2
~v(t) = ~v0 + ~at
v2x = v2x,0 + 2ax(x− x0)(and similarly for y and z)
~r(t) = ~r0 +1
2(~vi + ~vf )t
θ(t) = θ0 + ω0t+1
2αt2
ω(t) = ω0 + αt
ω2f = ω2
0 + 2α(θ − θ0)
θ(t) = θ0 +1
2(ωi + ωf )t
Energy and Momenta:
translational rotational
K = 1
2Mv2
W =∫
~F · d~r const−−−→force
~F ·∆~r
P = dWdt = ~F · ~v
~pcm = m1~v1 +m2~v2 + . . .
= M~vcm
~J =∫
~Fdt = ∆~p
∑ ~Fext = M~acm =d~pcmdt
∑ ~Fint = 0
if∑
Fext,x = 0, pcm,x = const
~τ = ~r × ~F and |~τ | = F⊥r = Fl
Krot =1
2Itotω
2
W =∫
τdθconst−−−→torque
τ ∆θ
P = dWdt = ~τ · ~ω
~L =∑
~r × ~p
= I1~ω1 + I2~ω2 + . . .
= Itot~ω
∑
~τext = Itot~α =d~L
dt∑
~τint = 0
if∑
τext,z = 0, Lz = const
—– Work-energy and potential energy —–
W = ∆K Etot,i +Wother = Etot,f
U = −∫
~F · d~r ; Ugrav = Mgycm ; Uelas =1
2k∆x2
Fx(x) = −dU(x)/dx ~F = −~∇U = −[
∂U∂x i+
∂U∂y j +
∂U∂z k
]
Constants/Conversions:
g = 9.80 m/s2= 32.15 ft/s
2(Earth, sea level)
≈ 10 m/s2 ≈ 33 ft/s
2
1 mi = 1609 m
1 lb = 4.448 N 1 ft = 12 in⇔ 0.454 kg (Earth, sea level) 1 in = 2.54 cm
1 rev = 360◦ = 2π radians
Circular motion: arad =v2
Ratan =
d|~v|dt
= Rα
T =2πR
vs = Rθ vtan = Rω
Relative velocity: ~vA/C = ~vA/B + ~vB/C
~vA/B = −~vB/A
Forces:Newton’s:
∑ ~F = m~a, ~FB on A = −~FA on B
Hooke’s: Fx = −k∆x
friction: |~fs| ≤ µs|~n|, |~fk| = µk|~n|Centre-of-mass:
~rcm =m1~r1 +m2~r2 + . . .+mn~rn
m1 +m2 + . . .+mn
(and similarly for ~v and ~a)
Phys 206 — Exam III Formulae

Moments of inertia:
Thin cylinder
I = MR2
Thin cylinder
I = 1
2MR2 + 1
12ML2
Hollow sphere
I = 2
3MR2
Solid sphere
I = 2
5MR2
Solid cylinder
I = 1
2MR2
Solid cylinder
I = 1
4MR2 + 1
12ML2
Thin rod
I = 1
12ML2
Thin rod
I = 1
3ML2
Thick cylinder
I = 1
2M(R2
1 +R22)
Thick cylinder
I = 1
4M(R2
1+R22) +
1
12ML2
Rectangular plate
I = 1
12M(a2 + b2)
Rectangular plate
I = 1
3Ma2
For a point-like particle of mass M a distance R from the axis of rotation: I = MR2
Parallel axis theorem: Ip = Icm +Md2
A disk is a cylinder of negligible length; the I for a disk may be found by setting L = 0 in the formulae for cylinders






![8 · Web viewΔ. Construct word and balanced formulae equations of all chemical reactions as they are encountered in this module: Note: In chemistry, [x]](https://static.fdocument.org/doc/165x107/5ab0cfbe7f8b9a1d168bcd3b/8-view-construct-word-and-balanced-formulae-equations-of-all-chemical-reactions.jpg)