Vibrations and Waves Formulae Summary: Lectures …...Vibrations and Waves (Jan-Feb 2011) Formulae...
21
Vibrations and Waves (Jan-Feb 2011) Formulae Summary : Lectures 1–2 Vibrations and Waves Formulae Summary: Lectures 1-2 Simple Harmonic Motion Hooke’s law: F = -kx, where k is the spring constant (k > 0 for restoring force). The equation of motion for a mass on a spring is ¨ x + k m x = 0 notation: ¨ x ≡ d 2 x dt 2 which has the general solution x = A cos(ωt + φ) ( x = A sin(ωt + φ) and A cos(ωt) + B sin(ωt), are also valid as general solutions, but we use the cos form in the lectures.) • ω = √ k/m is the angular frequency which is independent of amplitude • A is the amplitude • φ is the phase angle • f = ω/(2π) is the frequency and is measured in Hertz(Hz) (cycles per second) • T = 1/ f = 2π/ω is the period. ω is determined by “the physics” whereas A and φ are adjustable parameters which we choose to fit the initial conditions. A one-dimensional simple harmonic oscillator has two degrees of freedom, corresponding to x and v, x(t) = A cos(ωt + φ) and v(t) = -ωA sin(ωt + φ) Initial conditions on x(0) and v(0) can then be used to determine the adjustable constants A and φ: A 2 = x 2 + v ω 2 and tan φ = - v(0) ωx(0) 1 of 2
Transcript of Vibrations and Waves Formulae Summary: Lectures …...Vibrations and Waves (Jan-Feb 2011) Formulae...

Vibrations and Waves (Jan-Feb 2011) Formulae Summary : Lectures 1–2
Vibrations and WavesFormulae Summary: Lectures 1-2
Simple Harmonic Motion
Hooke’s law: F = −kx, where k is the spring constant (k > 0 for restoring force).
The equation of motion for a mass on a spring is
x +km
x = 0(
notation: x ≡ d2xdt2
)which has the general solution
x = A cos(ωt + φ)
(x = A sin(ωt + φ) and A cos(ωt) + B sin(ωt), are also valid as general solutions, but we usethe cos form in the lectures.)
• ω =√
k/m is the angular frequency which is independent of amplitude
• A is the amplitude
• φ is the phase angle
• f = ω/(2π) is the frequency and is measured in Hertz(Hz) (cycles per second)
• T = 1/ f = 2π/ω is the period.
ω is determined by “the physics” whereas A and φ are adjustable parameters which wechoose to fit the initial conditions. A one-dimensional simple harmonic oscillator has twodegrees of freedom, corresponding to x and v,
x(t) = A cos(ωt + φ) and v(t) = −ωA sin(ωt + φ)
Initial conditions on x(0) and v(0) can then be used to determine the adjustable constantsA and φ:
A2 = x2 +( vω
)2and tan φ = − v(0)
ωx(0)
1 of 2

Vibrations and Waves (Jan-Feb 2011) Formulae Summary : Lectures 1–2
[See Handout 2 for complex notation, phasors, and velocity and acceleration. See “ExtraNotes/SHM in an LC circuit” on Blackboard for the LC circuit.]
Equivalences between the LC system and the mass-on-a-spring system:
x→ Q m→ L k→ 1C
x→ I F → V
The restoring force for a pendulum is F = −mg sin θ. Applying Newton’s second law andapproximating sin θ ≈ θ gives the equation of motion for SHM,
d2θ
dt2 +g`θ = 0 with ω =
√g`
where ` is the pendulum length,
[See Handout 3 for non-linearities and their effect on the pendulum period. See ProblemSheet 1 for linear approximations to potentials]
The energy for a mass on a spring is
Potential Energy: PE =12
kx2 =12
kA2 cos2(ωt + φ)
Kinetic Energy: KE =12
mv2 =12
mω2A2 sin2(ωt + φ) =12
kA2 sin2(ωt + φ)
Total Energy: E = PE + KE =12
kA2 (cos2 + sin2)︸ ︷︷ ︸=1
=12
kA2
2 of 2

Vibrations and Waves (Jan-Feb 2011) SHM in an LC Circuit
Vibrations and Waves - SHM in an LC circuit (Lecture 2)
A number of you asked for clarification on how we got from an equation in terms of thecharge on the capacitor Q to one in terms of Q′ and quite what this meant.
By considering the current and electromotive force around the circuit and applying Faraday’slaw (that the e.m.f around a circuit equals minus the rate of change of magnetic flux throughthe circuit), we obtained
VC − V0 = − dΦ
dt= −L
dIdt
(Please don’t worry if you don’t understand this bit yet!) The voltage on the capacitor isVC = Q/C. The current is the rate of change of charge on the capacitor, I = dQ/ dt, whichgives us
QC− V0 = −L
d2Qdt2
We could have tried to solve this directly by substituting in trial solutions, but I wanted tosee if we could get it into a form that we could recognise as a simple harmonic oscillator.We can do this by making the simple substitution for variables Q′ = Q− V0C which gives
Q′
C= −L
d2Q′
dt2 +�����>
0
Ld2V0C
dt2 ⇒ Q′
C= −L
d2Q′
dt2
(where the cancellation is because V0C is a constant, so differentiating gives zero.) Rear-ranging we get
Q′ +1
LCQ′ = 0 — Equation of motion for SHM!
Since we recognise this, we can write the solution without any further work:
Q′ = A cos(ωt + φ) with ω =
√1
LC
Substituting back to get to our original Q, (and writing the constant V0C as Q0 = V0C) weget our solution
Q = Q′ + Q0 = A cos(ωt + φ) + Q0
1 of 2

Vibrations and Waves (Jan-Feb 2011) SHM in an LC Circuit
You will often find that physicists take a shortcut approach of just ignoring a constant in thedifferential equation, then just adding it back into the final solution (it sounds dirty, but itamounts to the same thing as the formal substitution really and is less effort.)
Finally, applying our initial conditions Q = 0 and dQ/ dt = 0 at t = 0 (as we did in lecture 1)fixes the adjustable parameters to A = Q0 and φ = π, giving,
Q = Q0 cos(ωt + π) + Q0
I don’t expect you to be able to use Faraday’s law yet, since you’ve not been taught itformally, nor do I expect you to be comfortable with electrical circuits. But I do expect youto understand why we manipulated the resulting equation to get it into the form that we didand that having done so we could identify it as the equation of motion for a simple harmonicoscillator and hence write down the solution for how it will behave. If YOU can do that for asystem that maybe you’ve not seen before you’ll be able to predict how it behaves withouthaving to understand all the underlying details — that’s a useful skill!
Carl Paterson 2 of 2

Vibrations and Waves (Jan-Feb 2011) Formulae Summary : Lectures 3–4
Vibrations and WavesFormulae Summary: Lectures 3-4
Damped OscillationsThe damping force (in fluid) is:
F = −b1v− b2|v|2v
where the first (linear) term is the viscous damping and the second (quadratic) term is thepressure term. If b2v2 � b1v then we have linear damping, which is what we will use,but be aware that there are situations where the pressure term dominates (such as lecturetheatre-sized demonstrations of pendulums!)
The equation of motion for a linear damped mass on a spring is
mx + bx + kx = 0
or x + γx + ω20x = 0 where ω2
0 =km
γ =bm
Henceforth we will use ω0 for the natural angular frequency of the undamped oscillator.
Units: [γ] = [ω0] = seconds−1
We define a Q-factor, Q =ω0
γ.
We can solve the free damped oscillator equation in the complex plane by substituting inthe trial solution x = A eαt (where A = A e iφ). This gives
[α2 + αγ + ω20] A eαt = 0
which has solutions for α given by
α = −γ2±√γ2
4− ω2
0
Light damping ( γ2
4 < ω20 )
α = −γ2± i
√ω2
0 −γ2
4which gives an oscillatory solution with an exponentially decaying amplitude:
x =A e−γ2 t e± iωdt where, ω2
d = ω20 −
γ2
4Real part: x =A e−
γ2 t cos(ωdt + φ)
• ωd is the damped frequency which is independent of amplitude.
• Adjustable constants A and φ will be determined by initial conditions.
In terms of Q,
ωd = ω0
√1− 1
4Q2 = ω0
[1− 1
8Q2 + . . .
]from which we see that the difference between ωd and ω0 decreases rapidly as Q increases.
1 of 4

Vibrations and Waves (Jan-Feb 2011) Formulae Summary : Lectures 3–4
• The amplitude (A e−γ2 t) decays by 1/ e in a time 2/γ.
• The energy, which is proportional to the amplitude squared decays by 1/ e in a time1/γ.
• Q = ω0/γ = πN where N is the number of oscillations for the amplitude to decay by1/ e.
For an LCR circuit,
VC + VR − V0 = −LdIdt
⇒ qC
+ Rdqdt− V0 = −L
d2qdt2
This is the same as the LC circuit in Lecture 2 with the addition of the R term. Rearranging(and dropping the constant V0 which will just add a constant to the solution), this reducesto the standard form
q + γq + ω20q = 0 where ω0 =
√1
LCγ =
RL
We can add b→ R to the list of equivalences we identified for the LC circuit in Lecture 2.
From Lecture 2, the energy in a harmonic oscillator is E = 12kA2. Applying this to the
damped oscillator gives
E(t) =12
kA20 e−γt
For high Q,Q2π≈ Energy stored in oscillator
Energy lost per period
2 of 4

Vibrations and Waves (Jan-Feb 2011) Formulae Summary : Lectures 3–4
Heavy Damping (γ2
4 > ω20)
α = −γ2±√γ2
4− ω2
0
In this case α is real and there is no oscillatory motion.
x = e−γ2 t
[A1 e−t
√γ24 −ω2
0 + A2 e+t√
γ24 −ω2
0
]We can also rewrite the solution of the form
x = e−γ2 t
[B1cosh
(t
√γ2
4− ω2
0
)+ B2 sinh
(t
√γ2
4− ω2
0
)]This form is simpler if the initial conditions are of the form x = 0 v = v0, (corresponding tothe oscillator receiving an impulse), since the cosh term must then be zero.
Critical Damping (γ2
4 = ω0)In this case, our previous trial solution leads to a solution with only one adjustable parame-ter, and so it is not the general solution. Without proof, here is the general solution for thecritically damped oscillator
x = (A + Bt) e−γ2 t
Plots of displacement against timefor oscillators with different Q withinitial conditions corresponding toan impulse. The critically dampedoscillator decays to zero fastest.
Q > 0.5 light dampingQ = 0.5 critical dampingQ < 0.5 heavy damping
Linear superposition and beatingConsider the superposition of two oscillations of similar frequencies ω1 and ω2 of equal am-plitude (such as the superposition of sound oscillations from two wine glasses for instance)
x = A e iω1t + A e iω2t
Rewrite ω1 and ω2,
ω1 =ω1 + ω2
2+ω1 − ω2
2and ω2 =
ω1 + ω2
2− ω1 − ω2
2
thenx = A e iω1+ω2
2 t[
e iω1−ω22 t + e− iω1−ω2
2 t]
︸ ︷︷ ︸2 cos
(ω1−ω2
2 t)
3 of 4

Vibrations and Waves (Jan-Feb 2011) Formulae Summary : Lectures 3–4
Taking the real part,
x = 2A cos(ω1 + ω2
2t)
︸ ︷︷ ︸FAST
cos(ω1 − ω2
2t)
︸ ︷︷ ︸SLOW
x = Re[x] = 2A cos (ωt)︸︷︷︸FAST
cos(
∆ω2 t)︸ ︷︷ ︸
SLOW
ω =ω1 + ω2
2∆ω = ω1 − ω2
TSLOW
TFAST=
ω1 + ω2
|ω1 − ω2|
[In the lecture we verified this for beating between oscillations from two different glasses bycounting the number oscillations in the period TSLOW.]
We hear modulation at the beat frequency,
∆ f = | f1 − f2| =2
TSLOW
(Remember: TSLOW is not the beat period!)
Carl Paterson 4 of 4

Vibrations and Waves (Jan-Feb 2011) Formulae Summary : Lectures 5–6
Vibrations and WavesFormulae Summary : Lectures 5–6
Forced OscillationsThe equation of motion for a damped oscillator driven by a force F0 cosωt is
mx + bx + kx = F0 cosωt
or x + γx + ω20x =
F0
mcosωt where γ =
bm, ω2
0 =km
or ¨x + γ ˙x + ω20 x =
F0
meiωt (complex plane)
We solve by substituting in the trial solution x = Aeiωt+φ. This determines the amplitude Aand phase φ of the response,
Aeiφ =F0/m
(ω20 − ω2) + i(ωγ)
⇒ A =F0/m√
(ω20 − ω2)2 + ω2γ2
tan φ =−ωγ
ω20 − ω2
Aeiφ describes the response of the system to the driving force at angular frequency ω. Notethat there are no adjustable parameters in the steady state solution.
ω� ω0 : A ≈ F0
k, φ ≈ 0 —“stiffness controlled”
ω� ω0 : A ≈ F0/mω2 φ ≈ −π —“mass controlled”
ω = ω0 : A =F0/mω0γ
=F0
kQ φ = −π
2—“resistance limited”
The maximum amplitude response occurs at
ωres =
√ω2
0 −γ2
2= ω0
√1− 1
2Q2 at which Ares = Aω0
1√1− 1/(4Q2)
The difference between this and the value at ω0 is very small for high Q.
1 of 4

Vibrations and Waves (Jan-Feb 2011) Formulae Summary : Lectures 5–6
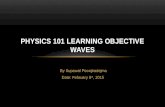
Figure 1: Forced damped oscillator response
For an LCR circuit driven by a cosinusoidal voltage, V0 cosωt the equation of motion (for thecapacitor charge) is
q + γq + ω20q =
V0
Lcosωt where ω0 =
√1
LCγ =
RL
and we can add F0 → V0 to the list of equivalences between the mechanical and electricalsystems.
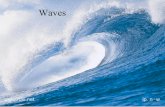
Figure 2: Driving the LCR circuit with a chirped (increasing frequency) driving voltage andobserving the voltage across the capacitor with an oscilloscope (left: sketch, right: actual).
2 of 4

Vibrations and Waves (Jan-Feb 2011) Formulae Summary : Lectures 5–6
TransientsIf the equation of motion for the forced oscillator is
x + γx + ω20x =
F0
mcosωt
When the force term is removed this becomes the homogeneous equation (i.e., RHS=0),which is just the equation of motion for the free damped oscillator. We can add any solutionof the homogeneous equation to the steady state forced oscillator solution and the resultwill still satisfy the forced oscillator equation. The general solution is then
x = A cos(ωt + φ)︸ ︷︷ ︸steady state
+ A0e− γ2 t cos(ωdt − α)︸ ︷︷ ︸
transient
(where we have renamed the adjustable constants from the damped oscillator solution fromlecture 3 to avoid conflict.) The adjustable parameters A0 and α are determined by initialconditions (A0 = A, α = −φ to make the initial displacement zero.)
(sketches not to the same scale)
This is a beating phenomena with beat frequency ∆ f = | fd − f | = |ωd − ω|/(2π).
Power Dissipation and AbsorptionThe work done by the oscillation against the damping force is
dW = − ~Fd. ~dx Power, P =dWdt
= − ~Fd.~v
Substituting in for the velocity, x = −ωA sin(ωt + φ) and using Fd = −b~v gives
P = b~v.~v = b|v|2 = bω2A2 sin2(ωt + φ)
Taking the time average (over one cycle is sufficient) gives
Pav =1T
∫ t+T
tPdt =
12
bω2A2 =12
F20γ
mω2
(ω20 − ω2)2 + ω2γ2
This is equivalent to the work done by the driving force on the system if the system is in asteady state.
Pav falls to half its maximum value for (ω2 − ω20)= ± ωγ. For reasonable Q (γ� ω0),
(ω2 − ω20) = (ω− ω0)(ω + ω0) ≈ 2ω∆ω ⇒ ∆ω ≈ ±γ
2γ� ω0
The full-width-at-half-maximum FWHM ≈ γ. We therefore call γ the width. In terms of theQ-factor, FWHM ≈ ω0/Q.
3 of 4

Vibrations and Waves (Jan-Feb 2011) Formulae Summary : Lectures 5–6
The function Pav can be interpreted as a power absorption curve for the system whendriven by a force of angular frequency ω. The strength of the absorption peak (Pav atω = ω0 is proportional to Q). We demonstrated resonance absorption by singing at high-Qwineglasses, observed resonance transfer of oscillations between high-Q wineglasses thathad almost the same resonant frequency and observed this did not work when the resonantfrequencies were different by much more than γ. We saw the Fraunhofer absorption linesin the solar spectrum as an example of resonance absorption by atoms and ions.
Carl Paterson 4 of 4

Vibrations and Waves (Jan-Feb 2011) Formulae Summary : Lectures 8–9
Vibrations and WavesFormulae Summary : Lectures 8–9
Types of wavesLongitudinal waves The oscillation of the medium is in the same direction as the prop-agation of the wave. Examples: the N-coupled masses and springs from Lecture 7, sound(pressure waves) in air, seismic P-waves. The wave motion results in compression andrarefaction of the medium. Longitudinal waves can propagate through gasses and liquids.
Transverse waves The oscillation of the medium is transverse to the propagation direc-tion of the wave. Examples: seismic S-waves, waves on a string, the Mexican wave, elec-tromagnetic waves. Transverse waves can exhibit polarization (oscillation can be in morethan one direction for a given wave propagation direction). Birefringence is where differentpolarizations have different propagation speeds.
Some waves can be a combination of longitudinal and transverse: e.g., surface gravitywater waves where the motion of the medium (the water) is elliptical having transverse andlongitudinal components 90◦ out of phase (i.e., in quadrature).
Transverse waves on string
Applying F = ma to a small element of the string for smallangles gives the one-dimensional wave equation,
∂2ψ
∂x2 =µ
T∂2ψ
∂t2 — the wave equation
Travelling wave solutions f (x ± vt) satisfy the wave equation provided v =√
T/µ. v is thewave propagation speed. Any function f (y) can be made a solution to the wave equationby the substitution y = x± vt.
The wave equation is linear: if f (x± vt) and g(x± vt) are solutions, then so is any superpo-sition of them. The general solution is a superposition of travelling waves in two directions
ψ(x, t) = f (x− vt) + g(x + vt)
For a travelling wave, the kinetic energy and potential energy are equal to each other at allpoints along the wave.
1 of 3

Vibrations and Waves (Jan-Feb 2011) Formulae Summary : Lectures 8–9
Open and Closed BoundariesAt a closed boundary, a travelling wave is reflected and inverted. Example: a travelling wavef (x − vt) travelling towards the end of the string (x = 0) which is held fixed. The boundarycondition is ψ = 0 at the closed end. Writing the reflected wave g(x + vt), then,
ψ(0, t) = f (−vt) + g(vt) ⇒ g(vt) =����:0
ψ(0, t)− f (−vt) ⇒ g(x + vt) = − f (−x− vt)
and we see that the wave is inverted on reflection.
At an open boundary a travelling wave is reflected but not inverted. Example: the end ofthe string is attached to an idealised massless ring on a frictionless pole. The boundarycondition is ∂ψ/∂x = 0 at an open end. Then
∂ψ
∂x(0, t) = f ′(−vt) + g′(vt) = 0 ⇒ g′(vt) = − f ′(−vt)
Integrating w.r.t. t gives g(vt) = f (−vt) ⇒ g(x + vt) = f (−x− vt), and so the wave is notnot inverted on reflection.
Harmonic Travelling WavesA harmonic travelling wave propagating along +x:
ψ = A cos[
2πλ
(vt − x)]
= A cos(ωt − kx)
At any point x, the wave motion is harmonic in time with angular frequency ω.
• λ is the wavelength. λ = v× period = v(2π)/ω
• k = (2π)/λ is the wavenumber.
• v = ω/k is the speed of propagation (phase velocity).
sin(kx± kx) and exp[i(ωt ± kx)] are equally valid harmonic travelling waves.
Any wave can be built up as a superposition of travelling waves with different A, ω and k(Fourier synthesis).
By considering the beat period between two frequencies f1 and f2, Tbeat = 1/∆ f , where∆ f = | f2− f1| we saw qualitatively that the minimum duration of a group or packet of waveswas determined by the range of frequencies of the harmonic waves used to make up thewave packet,
∆t∆ f & 1
where ∆t is the duration of the wave packet and ∆ f is the range of frequencies in the wavepacket. Using k = ω/k and x = vt this is readily converted into an equivalent form for atravelling wave ∆x∆k & 1. This is an example of the Bandwidth Theorem. We also relatedthese inequalities to uncertainty principles of quantum mechanics.
2 of 3

Vibrations and Waves (Jan-Feb 2011) Formulae Summary : Lectures 8–9
Reflection and transmission at an interface
incident wave (→) : Aiei(ωt−k1 x) transmitted wave (→) : Atei(ωt−k2 x)
reflected wave (←) : Arei(ωt+k1 x)
Boundary conditions:
1. ψ is continuous (string is not broken)
2. ∂ψ/∂x is continuous (interface does not experience infinite acceleration).
Applying the boundary conditions at the interface gives
BC 1: Ai + Ar = At
BC 2: −k1Ai + k1Ar = −k2At
giving,
Ar =k1 − k2
k1 + k2Ai At =
2k1
k1 + k2Ai
Using v = ω/k,
Ar =v2 − v1
v2 + v1Ai At =
2v2
v2 + v1Ai
Compare with light at normal incidence on a boundary between two dielectric media, inwhich case,
Ar =n1 − n2
n1 + n2Ai At =
2n1
n1 + n2Ai
where n1 and n2 are the refractive indices of the media (n1 = c/v1 etc.)
2-D and 3-D wavesIn 2-D and 3-D, wavefronts are respectively lines and surfaces of constant phase. Far froma point source, these wavefronts are approximately flat. We call these waves plane waves.The wavefronts are normal to the direction of propagation, have spacing λ and move alongwith the wave at the velocity of propagation. At a distance r from a point source,
• 2-D waves: Energy density ∝ 1/r (e.g., ripples on a pond)
• 3-D waves : Energy density ∝ 1/r2
Refraction
Snell’s Law:From continuity considerations (i.e., wavefronts must alignon both sides of the interface),
λ2
λ1=
h sin θ2
h sin θ1⇒ v2
v1=
sin θ2
sin θ1
Carl Paterson 3 of 3

Vibrations and Waves (Jan-Feb 2011) Formulae Summary : Lectures 10
Vibrations and WavesFormulae Summary : Lectures 10
Standing WavesThe superposition of two equal but counter-propagating travelling waves:
ψ = cos(ωt − kx) + cos(ωt + kx)= 2 cosωt︸ ︷︷ ︸
time
cos kx︸ ︷︷ ︸space
— standing wave, (also a normal mode)
Note: cos(ωt + φ) sin kx and cos(ωt + φ) cos kx (or a superposition with the same ω and φ)are equally valid standing wave solutions.
EnergyConsider the standing wave ψ = A cos kx cosωt on a string, At ωt = π/2, ψ = 0 and soall the standing wave energy is in kinetic form in the transverse motion of the string. Thetransverse velocity of the string (not to be confused with the wave velocity) is vt = ∂ψ/∂t =−Aω cos kx sinωt, and so the energy per wavelength of the standing wave is
E = KE =12
mv2t =
12
∫ λ
0µdxA2ω2 cos2 kx =
µA2ω2
2 ��������*λ/2∫ λ
0cos2 kxdx =
µA2ω2λ
4
Using v = ω/k =√
T/µ and k = 2π/λ, this can can be written as
E =Tπ2A2
λ(per wavelength)
Standing wave modesClosed–Closed boundary conditions: For a finite length with closed boundary condi-tions at x = 0 and x = L, only discrete values of k are allowed.
1 of 2

Vibrations and Waves (Jan-Feb 2011) Formulae Summary : Lectures 10
The resulting standing wave modes are
ψn = An sin knx cosωnt where kn =nπL, ωn =
nπvL= nω1, n = 1, 2, 3 . . .
n = 1 corresponds to the first harmonic or the fundamental, n = 2 to the second harmonicand so forth. The general situation is a superposition of these normal modes.
Closed–Open boundary conditions: For a closed–open system, the allowed modeshave
kn =(2n− 1)π
2L, ωn =
(2n− 1)vπ2L
(λn =
4L2n− 1
, fn =(2n− 1)v
4L
)n = 1, 2, 3, . . .
In this case the frequencies of the modes have ratios 1 : 3 : 5 : . . ..
Musical Instruments: Stringed instruments such as piano, violin, guitar, have closed–closed boundaries. Many wind instruments have closed–open boundaries (e.g., organ,clarinet, trumpet.) The characteristic sounds of instruments are determined by the mix ofharmonics that make up the sound.
2D wave equation
∂2ψ
∂x2 =1v2
∂2ψ
∂t2 (1-D) → ∂2ψ
∂x2 +∂2ψ
∂y2 =1v2
∂2ψ
∂t2 (2-D) (stated without proof)
The 2D wave equation has harmonic solutions
ψ = Aei(ωt−kx x−kyy) where k2x + k2
y =1v2ω
2
A system described by the 2-D wave equation, will also exhibit travelling waves and standingwaves and a bounded system will have normal modes. The system of modes will in generalbe more complicated than for the 1-D string. Examples include the sound boards of musicalinstruments such as the guitar and violin, which are responsible for radiating the sound ofthe instrument. The nodal-points of the 1-D case are replaced by nodal-lines in the 2-Dcase.
Carl Paterson 2 of 2

Vibrations and Waves (Jan-Feb 2011) Formulae Summary : Lecture 11
Vibrations and WavesFormulae Summary : Lecture 11
DispersionNon-dispersive waves have the same propagation speed v for all k and ω. Examples includeelectromagnetic waves in vacuum (but not in media), sound, and the transverse waves onthe ideal string. When v varies with k, the system is dispersive. Example: the guitar stringis non-ideal and has a finite stiffness, which gives an extra term to the wave equation
µ∂2ψ
∂t2 = T∂2ψ
∂x2︸ ︷︷ ︸non-dispersive
− C∂4ψ
∂x4︸ ︷︷ ︸stiffness term
(stated without proof)
Substituting ψ = ei(ωt−kx) (the same harmonic wave solution as before) gives
ω2 =Tµ
k2︸︷︷︸non-disp.
1 +CT
k2︸︷︷︸correction
The relationship between ω and k is the dispersion relationship. (For the guitar stringC/T � 1 and the dispersive correction is very small, corresponding to a fraction of 1 Hzover the typical range of frequencies used in the guitar.) Other examples of dispersivesystems include water waves, and electromagnetic waves in media.
Wave packets, Phase velocity and Group velocityConsider the superposition of two different harmonic waves
ψ1 = ei(ω1t−k1 x) (v1 = ω1/k1) and ψ2 = ei(ω2t−k2 x) (v2 = ω2/k2)
and using the same trignometric identity as when we derived beating,
ψ1 + ψ2 = 2ei(ω1+ω2
2 t− k1+k22 x
)cos[ω1 − ω2
2t − k1 − k2
2x]
= 2 ei(ωt−kx)︸ ︷︷ ︸v=ω/k
cos[
∆ω
2t − ∆k
2x]
︸ ︷︷ ︸v=∆ω/∆k
[writing
ω1 + ω2
2= ω and
k1 + k2
2= k]
The result is a travelling harmonic wave ei(·) with speed ω/k modulated by an envelopecos[·] which is also a travelling wave with speed ∆ω/∆k.
Define:
Phase velocity vp =ω
k
Group velocity vg =dωdk
1 of 2

Vibrations and Waves (Jan-Feb 2011) Formulae Summary : Lecture 11
• Normal dispersion:vg < vp.
• Anomalous dispersion:vg > vp.
A wave packet (or wave group) is made by Fourier superposition of of harmonic waves froma range of ω and k. The phase velocity gives the speed of the underlying harmonic waves,whereas the group velocity gives the speed of the envelope of the group.
ExamplesFor transverse waves on a uniform rod, (e.g., the central conducting rail on the LondonUnderground railway track)
µ∂2ψ
∂t2 = −EI∂4ψ
∂x4 (stated without proof)
where E is the Young’s modulus and I is the area cross-section moment of inertia. (Note:this case is related to the guitar string except that the stiffness term dominates and the ten-sion term is negligible). Substituting in a harmonic wave trial solution gives the dispersionrelation:
ψ = ei(ωt−kx) ⇒ ω2 =EIµ
k4 ⇒ ω =
√EIµ
k2
This is an example of anomalous dispersion. (It is straightforward to show that vg = 2vp.)
We also saw examples where the group velocity is much smaller than the phase velocityand where the phase velocity approaches infinity, exceeding c the speed of light in vacuum.We reconciled this by noting that a single harmonic wave cannot carry information—a wavepacket or group is required to transmit information (at the group velocity).
Group velocity dispersionFrom the bandwidth theorem, a finite length wave packet must consist of harmonic com-ponents from a range wavenumbers ∆k. If d2ω/dk2 6= 0 the group velocity will vary withk. Different parts of the wave group will propagate at different velocities and so the groupof waves will not preserve its shape on propagation. A measure of the range of groupvelocities present in the group is
∆vg ≈dvg
dk∆k =
d2ω
dk2 ∆k
Consequences of group velocity dispersion are chromatic dispersion and chromatic aberra-tion (the spreading of light with different wavelengths in lenses and prisms), and the length-ening of short laser pulses.
Finally, we saw that in optics there are small regions of anomalous dispersion that occurclose to resonant frequencies of some media in which both the phase velocity AND thegroup velocity may exceed c, the speed of light in vacuum!
Carl Paterson 2 of 2

Vibrations and Waves (Jan-Feb 2011) Formulae Summary : Lecture 12
Vibrations and WavesFormulae Summary : Lecture 12
Doppler Effect (Sound)Start with v = λ f . This also applies for a moving observer if the wave propagation speedv is replaced with the propagation speed relative to the observer and f with the frequencyobserved. (The wavelength λ is the same for a stationary or moving observer.)
Moving receiverf is the frequency in the mediumfR is the frequency at the receiver
v→ v− vR, f → fR ⇒ v− vR = λ fR
Using λ =vf⇒ fR =
(v− vR
v
)f
Moving source
v→ v− vS, f → fS ⇒ v− vS = λ fS
Using λ =vf⇒ ⇒ f =
(v
v− vS
)fS
CombinedCombining the two results,
fR =
(v− vR
v− vS
)fS
Two-slit diffraction
r2 − r1 = ∆r =
{nλ Constructive interference(n + 1
2 )λ Destructive interference
For small θ, the angular spacing between diffraction peaks (constructive interference) is
∆θ ≈ λ
dThis is the diffraction scale and more generally it gives the typical angular scale for diffrac-tion of light with wavelength λ from a structure of characteristic spatial size d. This is worthremembering.
IntensityWe define time-averaged intensity of a travelling wave (sometimes referred to simply asintensity) as the time-averaged power per unit area over a surface normal to the direction ofpropagation. Recall that energy density of a wave is proportional to the amplitude squared,so the time-averaged intensity obeys
I ∝ A2 ∝ |ψ|2
1 of 2

Vibrations and Waves (Jan-Feb 2011) Formulae Summary : Lecture 12
(since for the complex representation ψ = Aei(ωt−kx+φ), A = |ψ|).
Interference FringesFrom P1: ψ1 = Aei(ωt−kr1) From P2: ψ2 = Aei(ωt−kr2)
The linear superposition gives
ψ = ψ1 + ψ2 = Aeiωt(e−ikr1 + e−ikr2) = 2A ei(ωt−kr)︸ ︷︷ ︸travelling wave
cos(
k∆r2
)︸ ︷︷ ︸
envelope
where r =r1 + r2
2
The intensity is
I ∝ |ψ|2 = 4A2 cos2(
k∆r2
)= 4A2 cos2
(πd sin θ
λ
)︸ ︷︷ ︸
“ cos2 -fringes”
Note for two slits, the peak intensity of the fringes is 4× the intensity due to one slit.
Carl Paterson 2 of 2