Newton Einstein 1 πGT x dx dλ -...
26
Nonostante sia la forza piu’ debole (10 -36 volte meno intensa di quella elettromagnetica) la forza di gravita’ e’ quella piu’ rilevante su scale cosmologiche ed astrofisiche. Ne consegue che ogni spiegazione dei fenomeni astronomico-cosmologici deve basarsi su una teoria della gravitazione. La migliore teoria elaborata fino ad ora e’ quella della Relativita’ Generale di Einstein. (anche se in molti casi l’approccio Newtoniano e’ sufficientemente preciso). L’idea alla base della Relativita’ Generale e’ quella di interpretare la forza di gravita’ come una prorieta’ (geometrica) dello spazio-tempo. ! F g = − GMm r 2 ! e r ∇ 2 φ = 4 πGρ [ ] ! F g = m ! a − ! ∇φ = ! a [ ] R μν − 1 2 Rg μν = 8πGT μν d 2 x μ dλ 2 + Γ ρσ μ dx ρ dλ dx σ dλ = 0 Newton Einstein
Transcript of Newton Einstein 1 πGT x dx dλ -...
Nonostante sia la forza piu’ debole (10-36 volte meno intensa di quella elettromagnetica) la forza di gravita’ e’ quella piu’ rilevante su scale cosmologiche ed astrofisiche. Ne consegue che ogni spiegazione dei fenomeni astronomico-cosmologici deve basarsi su una teoria della gravitazione. La migliore teoria elaborata fino ad ora e’ quella della Relativita’ Generale di Einstein. (anche se in molti casi l’approccio
Newtoniano e’ sufficientemente preciso).
L’idea alla base della Relativita’ Generale e’ quella di interpretare la forza di gravita’ come una prorieta’ (geometrica) dello spazio-tempo.
€
! F g = −
GMmr2! e r ∇
2φ = 4πGρ[ ]! F g = m! a −
! ∇ φ =
! a [ ]
€
Rµν −12Rgµν = 8πGTµν
d2xµ
dλ2 +Γρσµ d x ρ
dλd xσ
dλ= 0
Newton Einstein
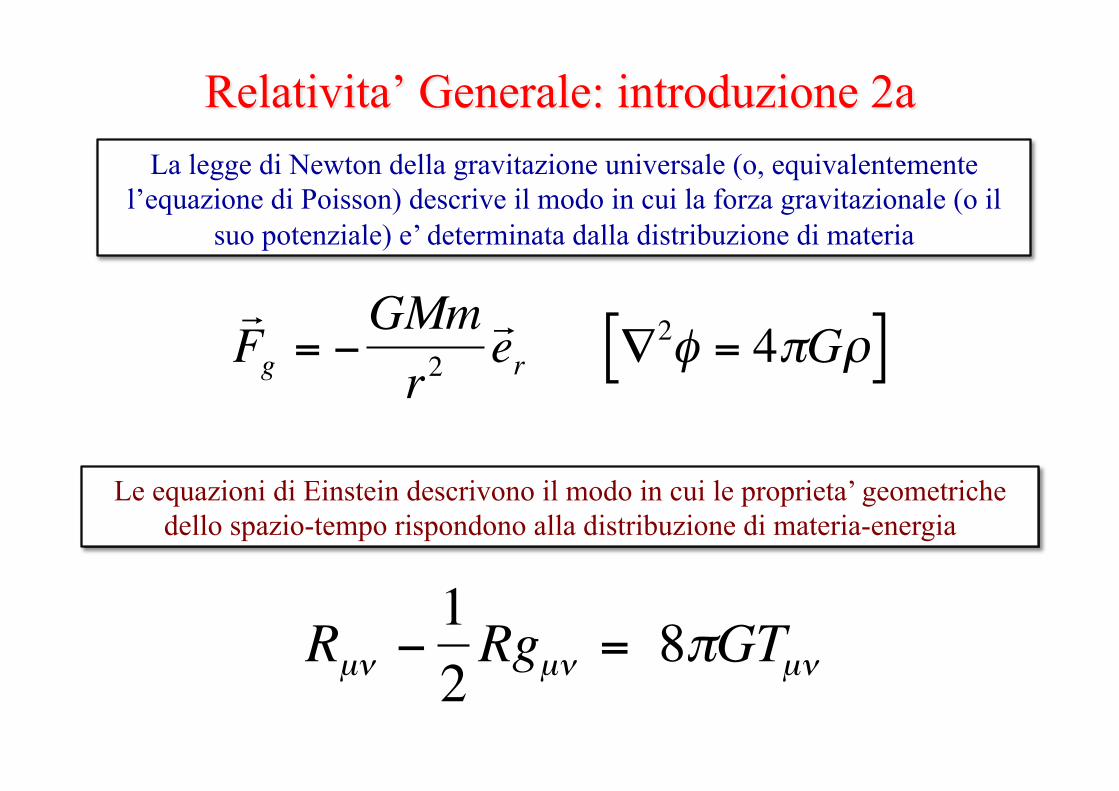
La legge di Newton della gravitazione universale (o, equivalentemente l’equazione di Poisson) descrive il modo in cui la forza gravitazionale (o il
suo potenziale) e’ determinata dalla distribuzione di materia
Le equazioni di Einstein descrivono il modo in cui le proprieta’ geometriche dello spazio-tempo rispondono alla distribuzione di materia-energia
€
! F g = −
GMmr2! e r ∇
2φ = 4πGρ[ ]
€
Rµν −12Rgµν = 8πGTµν
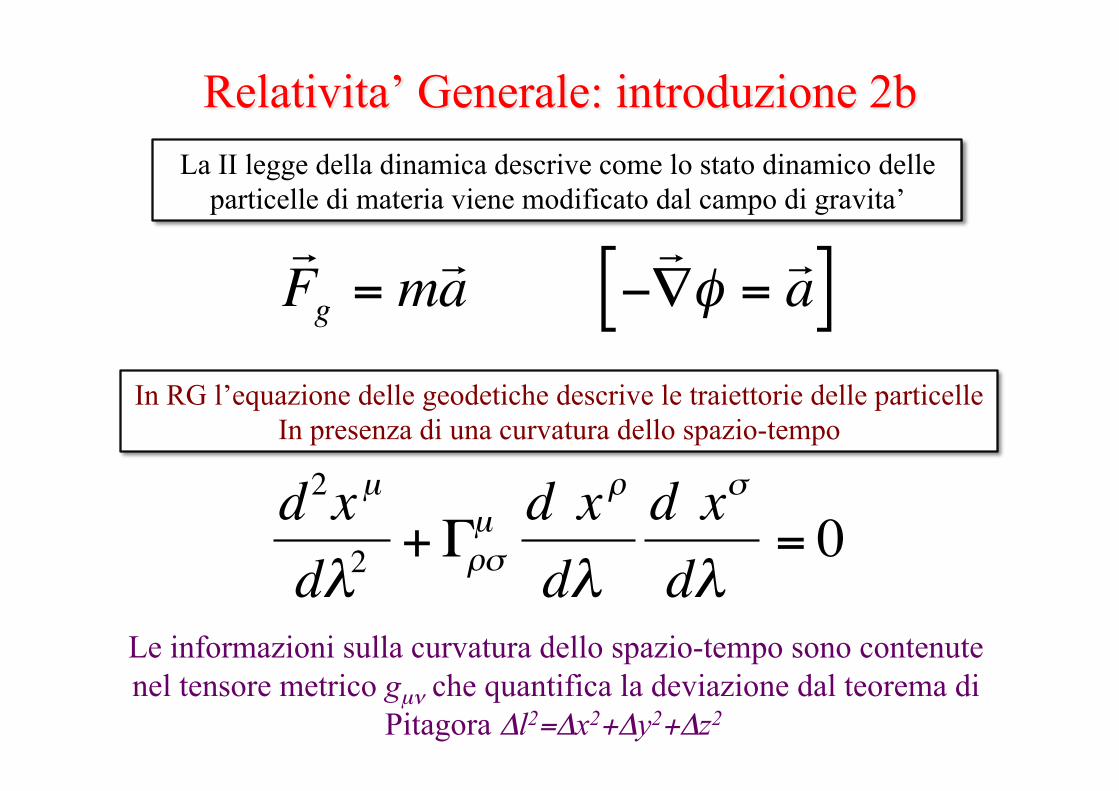
La II legge della dinamica descrive come lo stato dinamico delle particelle di materia viene modificato dal campo di gravita’
In RG l’equazione delle geodetiche descrive le traiettorie delle particelle In presenza di una curvatura dello spazio-tempo
Le informazioni sulla curvatura dello spazio-tempo sono contenute nel tensore metrico gµν che quantifica la deviazione dal teorema di
Pitagora Δl2=Δx2+Δy2+Δz2
€
! F g = m! a −
! ∇ φ =
! a [ ]
€
d2xµ
dλ2+Γρσ
µ d x ρ
dλd xσ
dλ= 0
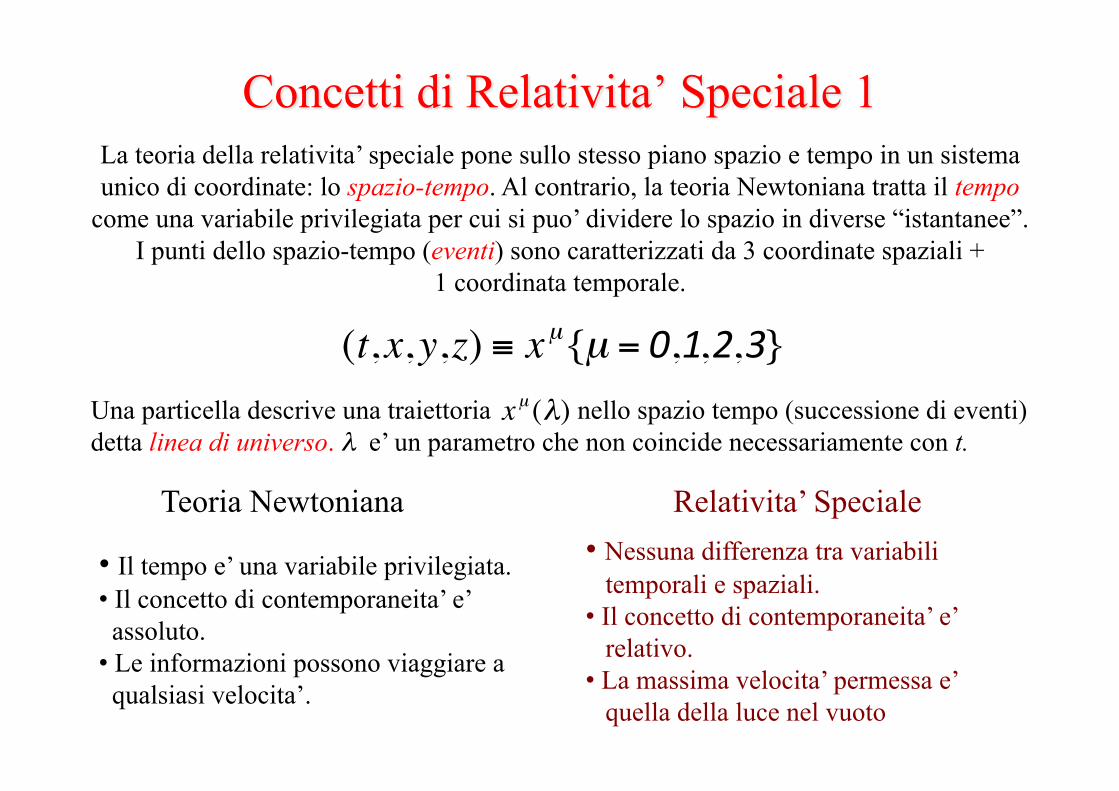
La teoria della relativita’ speciale pone sullo stesso piano spazio e tempo in un sistema unico di coordinate: lo spazio-tempo. Al contrario, la teoria Newtoniana tratta il tempo
come una variabile privilegiata per cui si puo’ dividere lo spazio in diverse “istantanee”. I punti dello spazio-tempo (eventi) sono caratterizzati da 3 coordinate spaziali +
1 coordinata temporale.
Una particella descrive una traiettoria nello spazio tempo (successione di eventi) detta linea di universo. λ e’ un parametro che non coincide necessariamente con t.
€
(t,x,y,z) ≡ xµ{µ = 0,1,2,3}
€
xµ (λ)
Teoria Newtoniana
• Il tempo e’ una variabile privilegiata. • Il concetto di contemporaneita’ e’ assoluto. • Le informazioni possono viaggiare a qualsiasi velocita’.
Relativita’ Speciale • Nessuna differenza tra variabili temporali e spaziali. • Il concetto di contemporaneita’ e’ relativo. • La massima velocita’ permessa e’ quella della luce nel vuoto
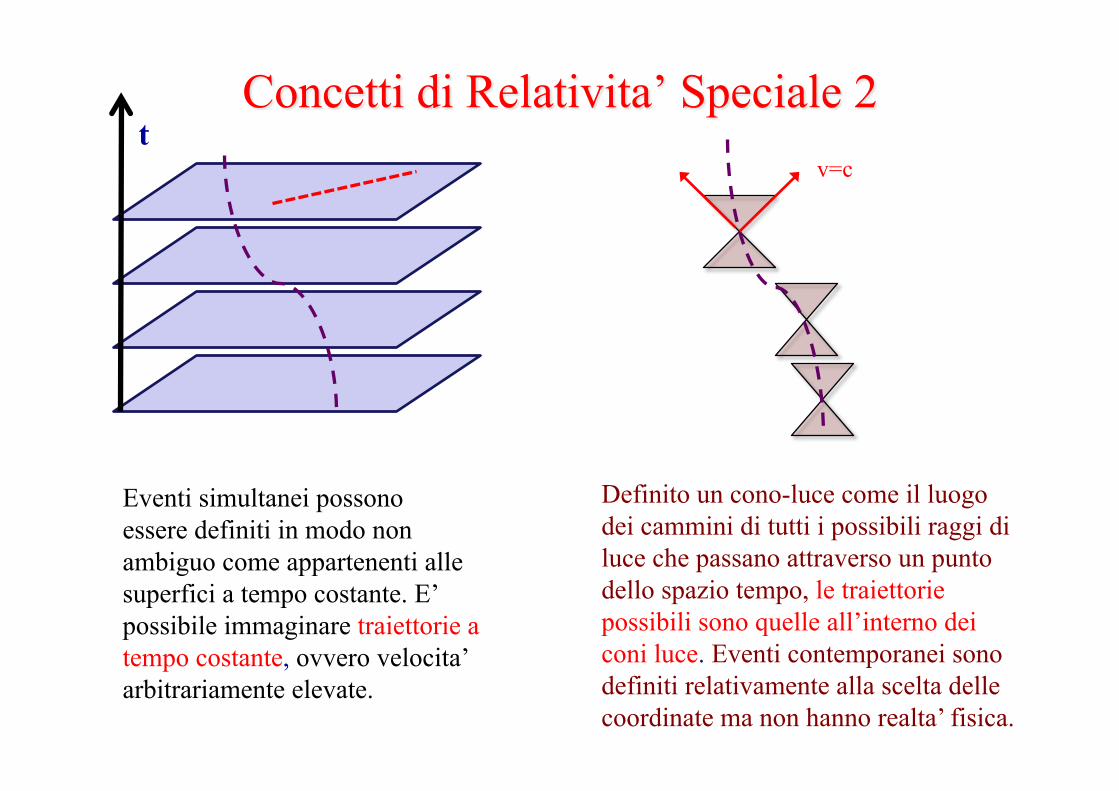
Definito un cono-luce come il luogo dei cammini di tutti i possibili raggi di luce che passano attraverso un punto dello spazio tempo, le traiettorie possibili sono quelle all’interno dei coni luce. Eventi contemporanei sono definiti relativamente alla scelta delle coordinate ma non hanno realta’ fisica.
t
Eventi simultanei possono essere definiti in modo non ambiguo come appartenenti alle superfici a tempo costante. E’ possibile immaginare traiettorie a tempo costante, ovvero velocita’ arbitrariamente elevate.
v=c
- -
€
Δ
€
Δ
€
Δ
€
Δ
€
Δ
-
Benche’ la scelta del sistema di coordinate sia arbitraria, alcune proprieta’ dello spazio-tempo sono indipendenti da tale scelta. Per esempio la distanza tra 2 punti rimane
costante al variare della scelta di coordinate. In quelle Cartesiane: Δl2=Δx2+Δy2+Δz2 In RS la variabile tempo e’ indistinguibile dalle variabili spaziali. Possiamo cosi’ definire dei sistemi di coordinate detti inerziali che sono equivalenti tra loro e che
differiscono solo per una traslazione spaziale, temporale, rotazione o boost. In ambito Newtoniano un set di coordinate (t’,x’,y’,z’) deve essere tale che, rispetto a
quello (t,x,y,z) sussista la relazione t’=t+cost indipendentemente dalla scelta delle coordinate. In RS questo non e’ piu’ vero. Lo spazio definito a t costante non e’ in
generale equivalente a quello definito a t’ costante.
Possiamo comunque definire in modo univoco un intervallo spazio-temporale, che specifica la distanza tra due eventi infinitamente vicini e che non dipende dalla scelta
delle coordinate. In RS questo intervallo, espresso in coordinate Cartesiane, e’
€
ds2 = −(cdt)2 + dx 2 + dy 2 + dz2 =ηµν dxµdxν
Dove abbiamo introdotto la Metrica (o tensore metrico) di Minkowski ηµν che specifica le proprieta’ geometriche dello spazio tempo. La quantita’ c e’ una
velocita’costante che sperimentalmente coincide con quella della luce nel vuoto.
t
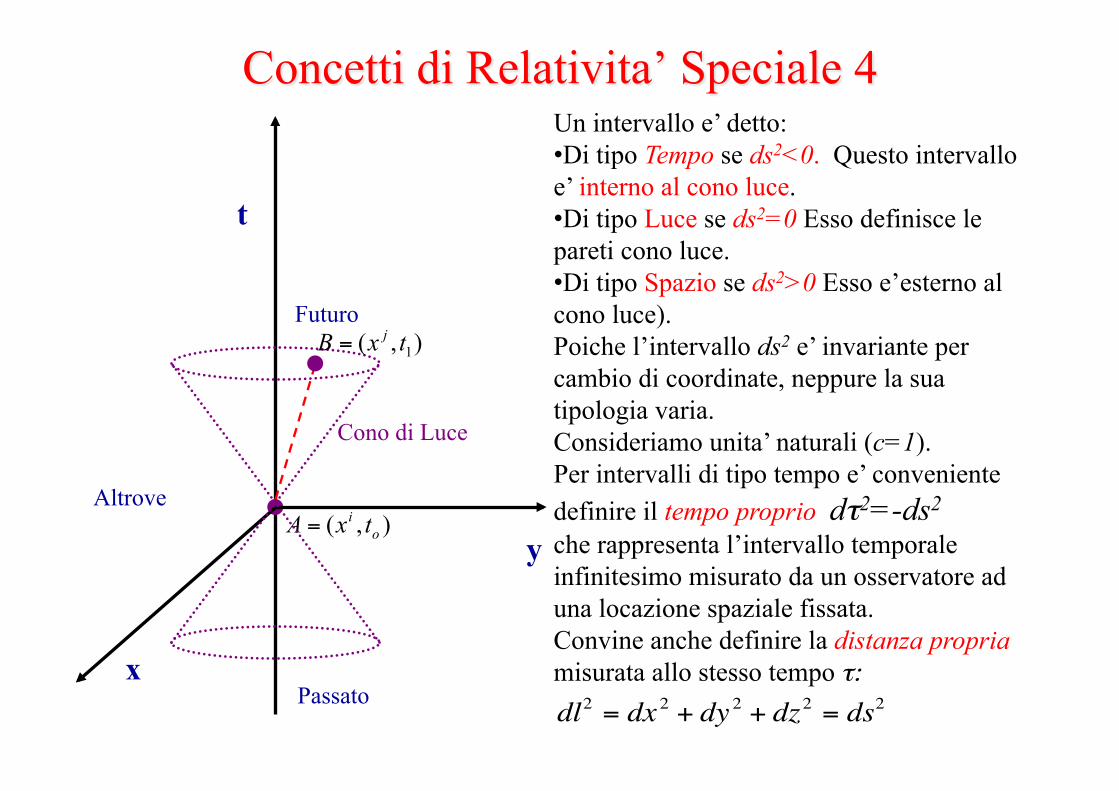
),( oi txA =
y
x
),( 1txB j=Futuro
Passato
Altrove
Cono di Luce
Un intervallo e’ detto: • Di tipo Tempo se ds2<0. Questo intervallo e’ interno al cono luce. • Di tipo Luce se ds2=0 Esso definisce le pareti cono luce. • Di tipo Spazio se ds2>0 Esso e’esterno al cono luce). Poiche l’intervallo ds2 e’ invariante per cambio di coordinate, neppure la sua tipologia varia. Consideriamo unita’ naturali (c=1). Per intervalli di tipo tempo e’ conveniente definire il tempo proprio dτ2=-ds2 che rappresenta l’intervallo temporale infinitesimo misurato da un osservatore ad una locazione spaziale fissata. Convine anche definire la distanza propria misurata allo stesso tempo τ:
€
dl2 = dx 2 + dy 2 + dz2 = ds2
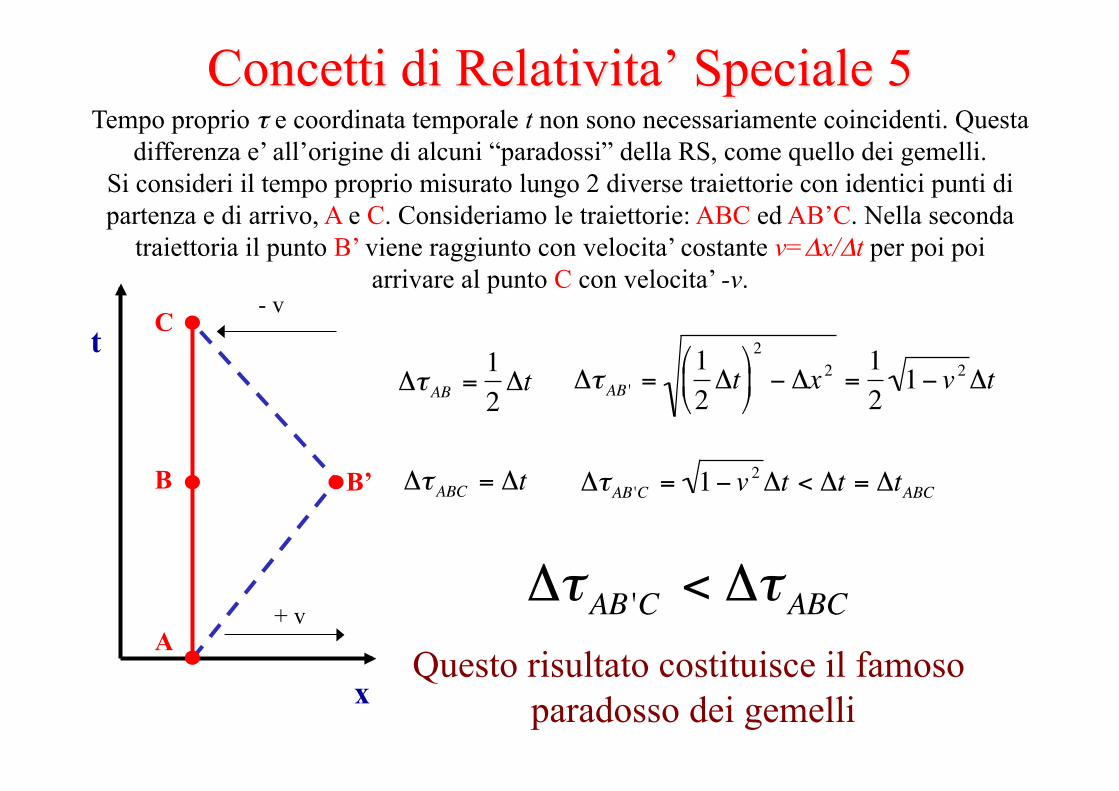
Tempo proprio τ e coordinata temporale t non sono necessariamente coincidenti. Questa differenza e’ all’origine di alcuni “paradossi” della RS, come quello dei gemelli.
Si consideri il tempo proprio misurato lungo 2 diverse traiettorie con identici punti di partenza e di arrivo, A e C. Consideriamo le traiettorie: ABC ed AB’C. Nella seconda
traiettoria il punto B’ viene raggiunto con velocita’ costante v=Δx/Δt per poi poi arrivare al punto C con velocita’ -v.
x
t
A
C
B’ B €
ΔτAB =12Δt
€
ΔτAB ' =12Δt
⎛
⎝ ⎜
⎞
⎠ ⎟ 2
− Δx 2 =121− v 2Δt
€
ΔτABC = Δt
€
ΔτAB 'C = 1− v 2Δt < Δt = ΔtABC
€
ΔτAB 'C < ΔτABCQuesto risultato costituisce il famoso
paradosso dei gemelli
+ v
- v
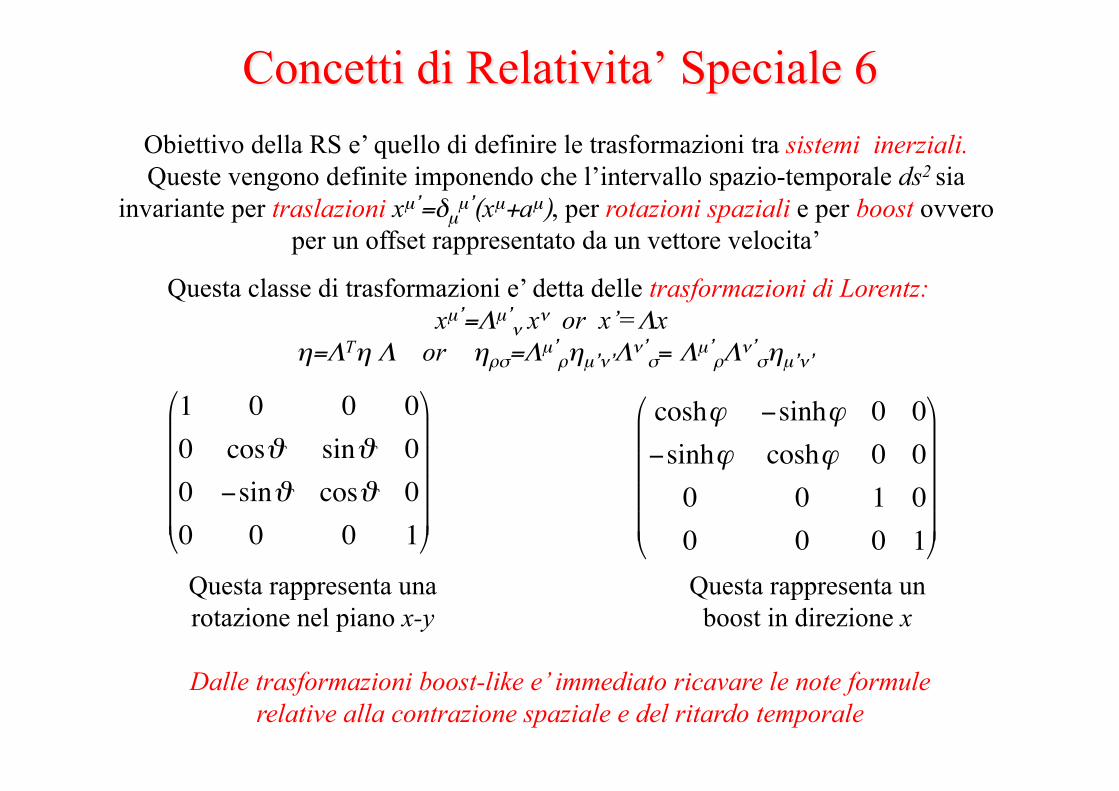
Obiettivo della RS e’ quello di definire le trasformazioni tra sistemi inerziali. Queste vengono definite imponendo che l’intervallo spazio-temporale ds2 sia
invariante per traslazioni xµ’=δµµ’(xµ+aµ), per rotazioni spaziali e per boost ovvero
per un offset rappresentato da un vettore velocita’
Questa classe di trasformazioni e’ detta delle trasformazioni di Lorentz: xµ’=Λµ’
ν xν or x’=Λx η=ΛTη Λ or ηρσ=Λµ’
ρηµ’ν’Λν’σ= Λµ’
ρΛν’σηµ’ν’
€
coshϕ −sinhϕ 0 0−sinhϕ coshϕ 0 00 0 1 00 0 0 1
⎛
⎝
⎜ ⎜ ⎜ ⎜
⎞
⎠
⎟ ⎟ ⎟ ⎟
Questa rappresenta una rotazione nel piano x-y
€
1 0 0 00 cosϑ sinϑ 00 −sinϑ cosϑ 00 0 0 1
⎛
⎝
⎜ ⎜ ⎜ ⎜
⎞
⎠
⎟ ⎟ ⎟ ⎟
Questa rappresenta un boost in direzione x
Dalle trasformazioni boost-like e’ immediato ricavare le note formule relative alla contrazione spaziale e del ritardo temporale
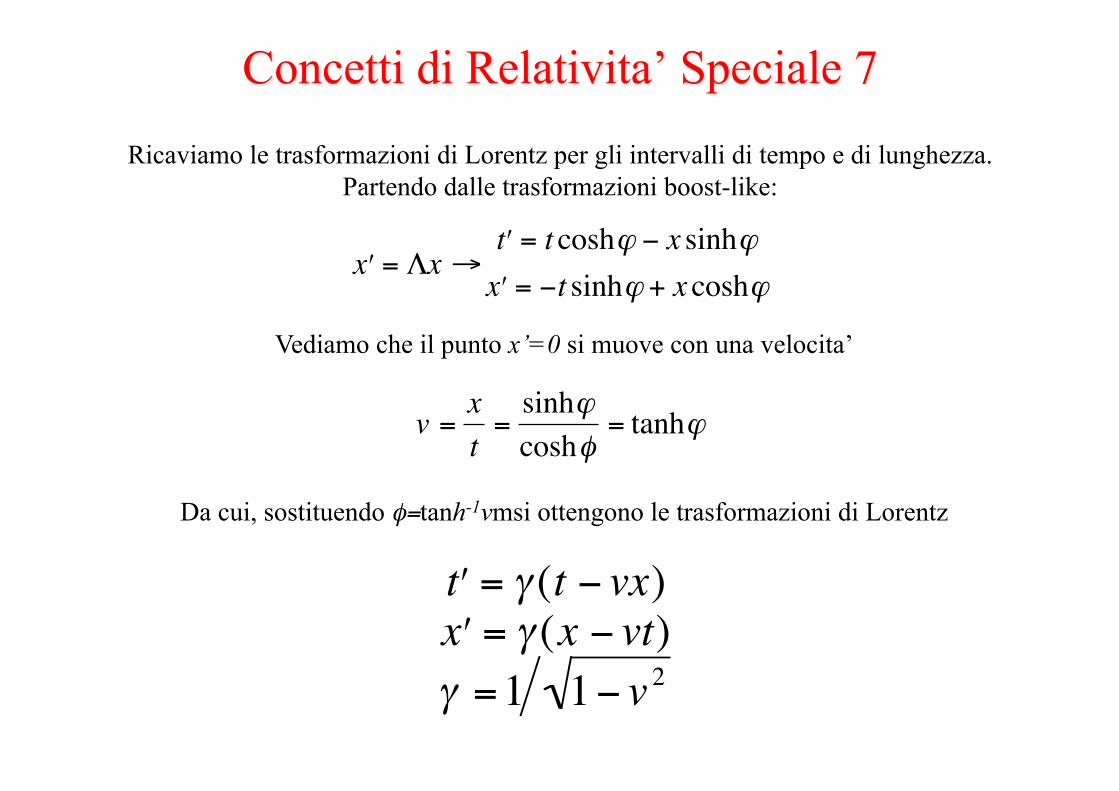
Ricaviamo le trasformazioni di Lorentz per gli intervalli di tempo e di lunghezza. Partendo dalle trasformazioni boost-like:
Vediamo che il punto x’=0 si muove con una velocita’
€ €
€
ʹ x = Λx →ʹ t = t coshϕ − x sinhϕʹ x = −t sinhϕ + x coshϕ
€
v =xt
=sinhϕcoshφ
= tanhϕ
Da cui, sostituendo φ=tanh-1vmsi ottengono le trasformazioni di Lorentz
€
ʹ t = γ (t − vx)ʹ x = γ (x − vt)γ =1 1− v 2
In ogni punto dello spazio tempo possiamo definire un vettore (campo vettoriale) che, grazie alla metrica di Minkowski, sappiamo trasportare in ogni altro punto dello
spazio tempo. Cosa che non si puo’ fare in presenza di una curvatura, ovvero di una diversa metrica dello spazio-tempo. E’ quindi utile pensare i vettori in modo locale,
associati ad un punto dello spazio tempo, senza presumere di poterli trasportare da un punto ad un altro in modo univoco, come accade in uno spazio piatto.
L’insieme dei vettori definiti relativamente ad punto p e’ detto Spazio Tangente a p, un nome che deriva dall’associare un piano tangente in p ad una varieta’ curva. Lo spazio tangente puo’ essere pensato come spazio vettoriale, ovvero un insieme di
vettori che possono essere composti linearmente tra loro.
E’ spesso utile esprimere i vettori in termini di componenti definite rispetto ad un sistema di basi. Una base e’ un insieme di vettori definiti nello spazio vettoriale per cui ogni vettore e’ decomponibile in termini delle basi mentre, viceversa, i vettori
basi non sono ulteriormente decomponibili. La scelta delle basi possibili e’ infinita, ma il numero di vettori che compone la base, ovvero la dimensione dello spazio, e’
sempre la stessa. Ogni vettore A e’ quindi decomponibile in termini delle basi e
Tipico e’ il vettore tangente ad una curva di tipo tempo:
€
A = Aµ ˆ e (µ ) Aµ = componenti
€
(a + b)(V +W ) = aV + bV + aW + bW
Questa considerazione ci permette di ricavare la regola di trasformazione per i vettori base:
Un tipico esempio e’ il vettore tangente ad una curva xµ(λ):
€
V µ =dxµ
dλ; V ≡V µ ˆ e (µ )
Sotto una trasformazione, (es. di Lorentz), le componenti del vettore si modificano:
€
V µ' = Λνµ 'V ν
€
Λν 'µ
€
V = V µ ˆ e (µ ) = V ʹ ν ˆ e ( ʹ ν ) = Λµʹ ν V µ ˆ e ( ʹ ν ) → ˆ e (µ ) = Λµ
ʹ ν ˆ e ( ʹ ν )
Mentre il vettore V in se’ non varia
I vettori le cui componenti (e basi) si trasformano secondo le regole di cui sopra sono detti vettori controvarianti e sono denotati da indici in basso.
Dove rappresenta la trasformazione di Lorentz inversa
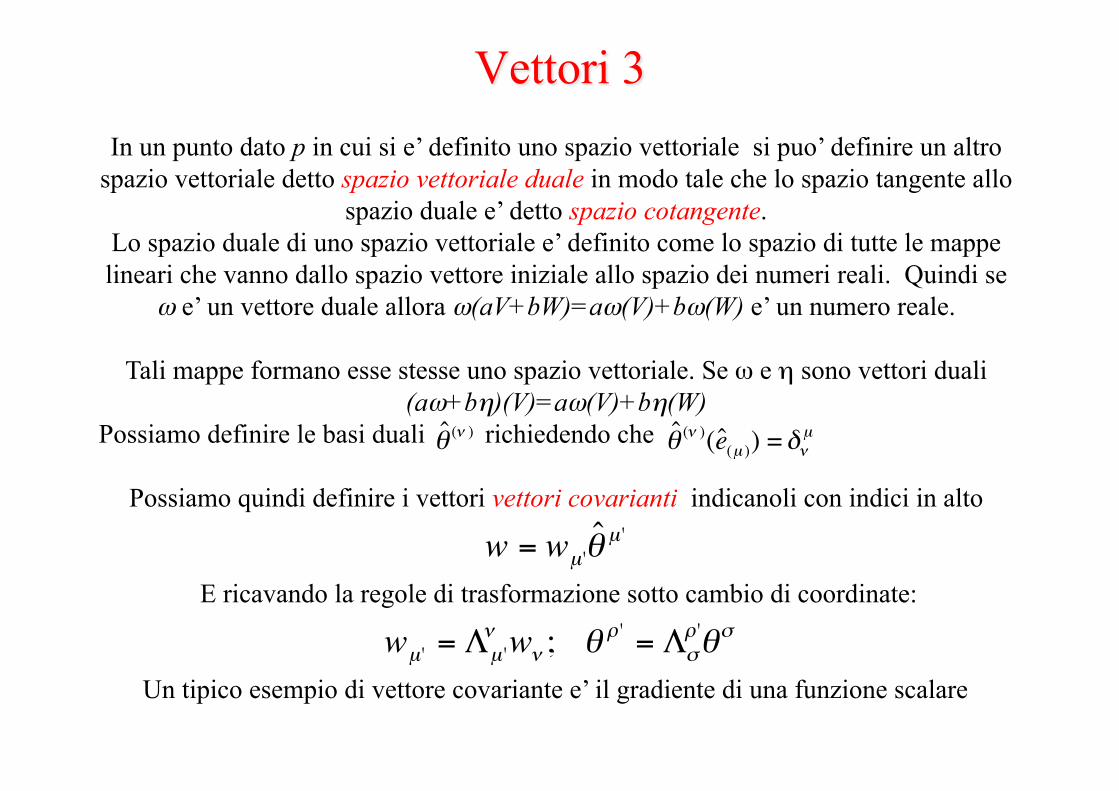
In un punto dato p in cui si e’ definito uno spazio vettoriale si puo’ definire un altro spazio vettoriale detto spazio vettoriale duale in modo tale che lo spazio tangente allo
spazio duale e’ detto spazio cotangente. Lo spazio duale di uno spazio vettoriale e’ definito come lo spazio di tutte le mappe lineari che vanno dallo spazio vettore iniziale allo spazio dei numeri reali. Quindi se
ω e’ un vettore duale allora ω(aV+bW)=aω(V)+bω(W) e’ un numero reale.
Tali mappe formano esse stesse uno spazio vettoriale. Se ω e η sono vettori duali (aω+bη)(V)=aω(V)+bη(W)
Possiamo definire le basi duali richiedendo che
Possiamo quindi definire i vettori vettori covarianti indicanoli con indici in alto
€
wµ' = Λµ 'ν wν ; θ ρ ' = Λσ
ρ 'θσ Un tipico esempio di vettore covariante e’ il gradiente di una funzione scalare
€
ˆ θ (ν )
€
ˆ θ (ν )( ˆ e (µ )) =δνµ
€
w = wµ'ˆ θ µ '
E ricavando la regole di trasformazione sotto cambio di coordinate:
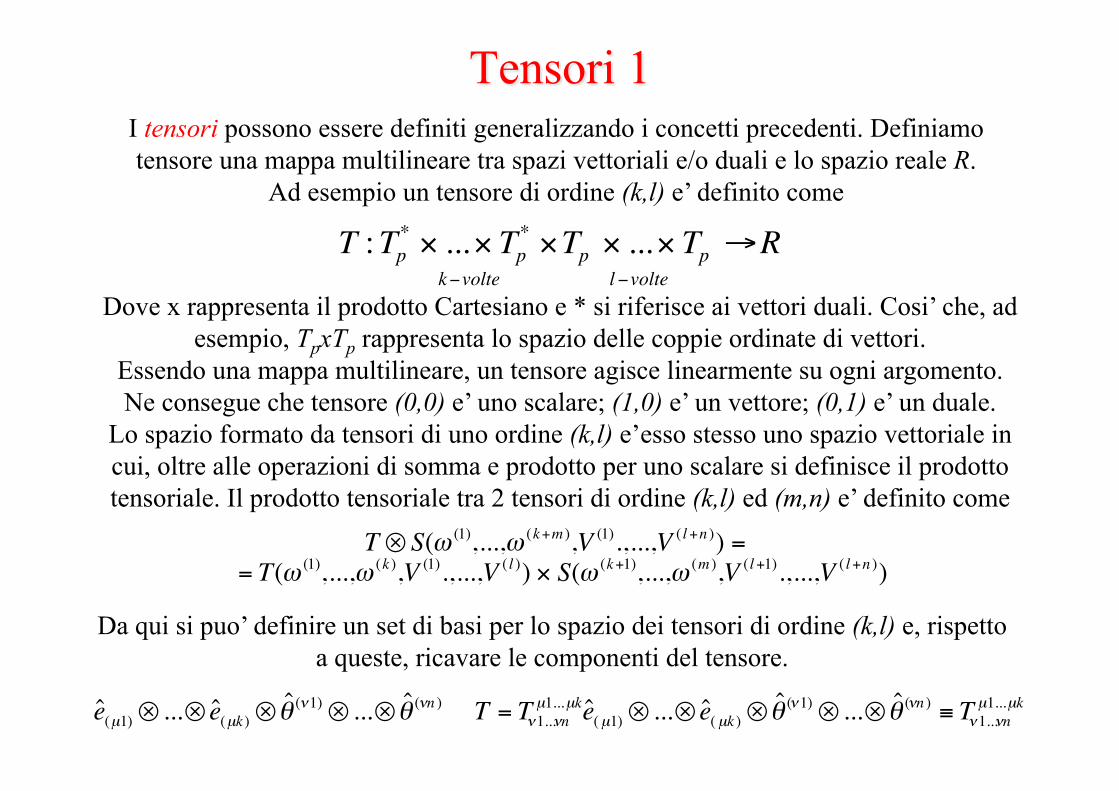
I tensori possono essere definiti generalizzando i concetti precedenti. Definiamo tensore una mappa multilineare tra spazi vettoriali e/o duali e lo spazio reale R.
Ad esempio un tensore di ordine (k,l) e’ definito come
Dove x rappresenta il prodotto Cartesiano e * si riferisce ai vettori duali. Cosi’ che, ad esempio, TpxTp rappresenta lo spazio delle coppie ordinate di vettori.
Essendo una mappa multilineare, un tensore agisce linearmente su ogni argomento. Ne consegue che tensore (0,0) e’ uno scalare; (1,0) e’ un vettore; (0,1) e’ un duale.
Lo spazio formato da tensori di uno ordine (k,l) e’esso stesso uno spazio vettoriale in cui, oltre alle operazioni di somma e prodotto per uno scalare si definisce il prodotto tensoriale. Il prodotto tensoriale tra 2 tensori di ordine (k,l) ed (m,n) e’ definito come
€
T ⊗ S(ω (1),...,ω (k+m ),V (1).,...,V ( l+n )) == T(ω (1),...,ω (k ),V (1).,...,V ( l )) × S(ω (k+1),...,ω (m ),V (l+1).,...,V ( l+n ))
Da qui si puo’ definire un set di basi per lo spazio dei tensori di ordine (k,l) e, rispetto a queste, ricavare le componenti del tensore.
€
T :Tp* × ...× Tp
* ×k−volte
Tp × ...× Tpl−volte
→R
€
ˆ e (µ1) ⊗ ...⊗ ˆ e (µk ) ⊗ˆ θ (ν1) ⊗ ...⊗ ˆ θ (νn )
€
T = Tν1...νnµ1...µk ˆ e ( µ1) ⊗ ...⊗ ˆ e ( µk ) ⊗
ˆ θ (ν1) ⊗ ...⊗ ˆ θ (νn ) ≡ Tν1...νnµ1...µk
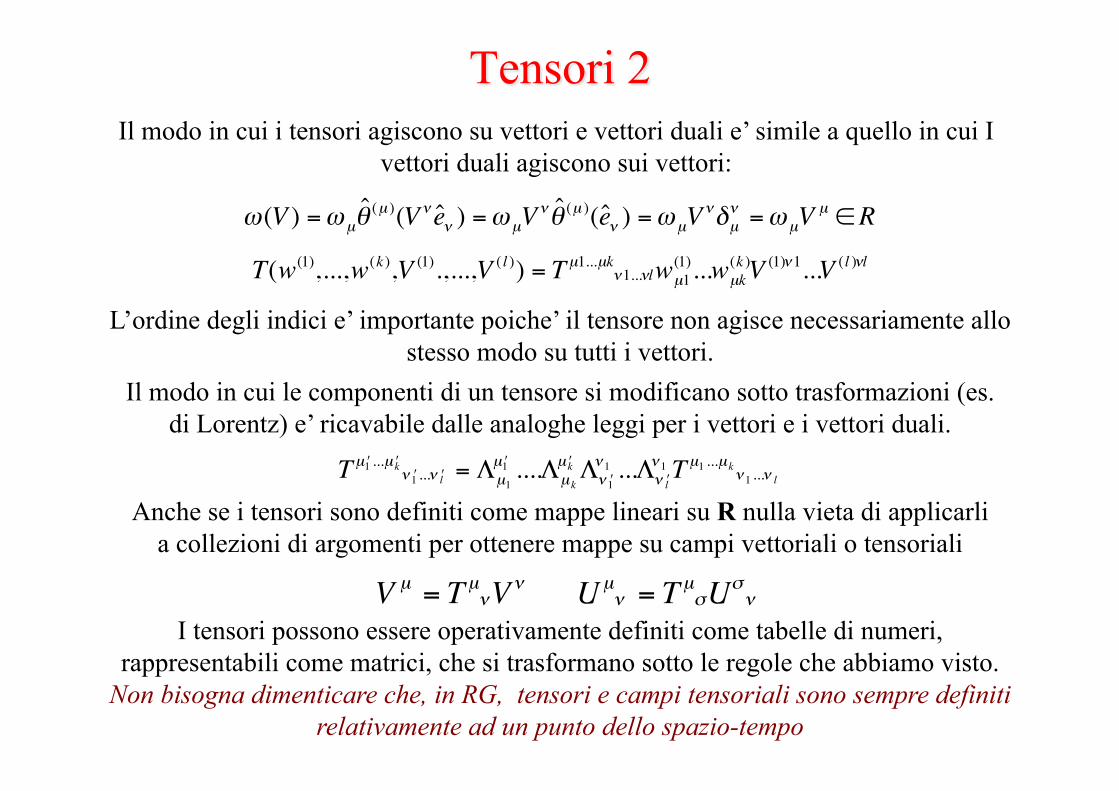
Il modo in cui i tensori agiscono su vettori e vettori duali e’ simile a quello in cui I vettori duali agiscono sui vettori:
Il modo in cui le componenti di un tensore si modificano sotto trasformazioni (es. di Lorentz) e’ ricavabile dalle analoghe leggi per i vettori e i vettori duali.
I tensori possono essere operativamente definiti come tabelle di numeri, rappresentabili come matrici, che si trasformano sotto le regole che abbiamo visto.
Non bisogna dimenticare che, in RG, tensori e campi tensoriali sono sempre definiti relativamente ad un punto dello spazio-tempo €
V µ = T µνV ν U µ
ν = T µσUσ
ν
€
T(w(1),...,w(k ),V (1).,...,V ( l )) = T µ1...µkν1...νlwµ1
(1)...wµk(k )V (1)ν1...V (l )νl
L’ordine degli indici e’ importante poiche’ il tensore non agisce necessariamente allo stesso modo su tutti i vettori.
Anche se i tensori sono definiti come mappe lineari su R nulla vieta di applicarli a collezioni di argomenti per ottenere mappe su campi vettoriali o tensoriali
€
ω(V ) =ω µˆ θ (µ )(V ν ˆ e ν ) =ω µV
ν ˆ θ (µ )( ˆ e ν ) =ω µVνδµ
ν =ω µVµ ∈R
€
T ʹ µ 1 ... ʹ µ kʹ ν 1 ... ʹ ν l = Λµ1
ʹ µ 1 ....Λµk
ʹ µ k Λ ʹ ν 1
ν 1 ...Λ ʹ ν l
ν 1 T µ1 ...µkν 1 ...ν l
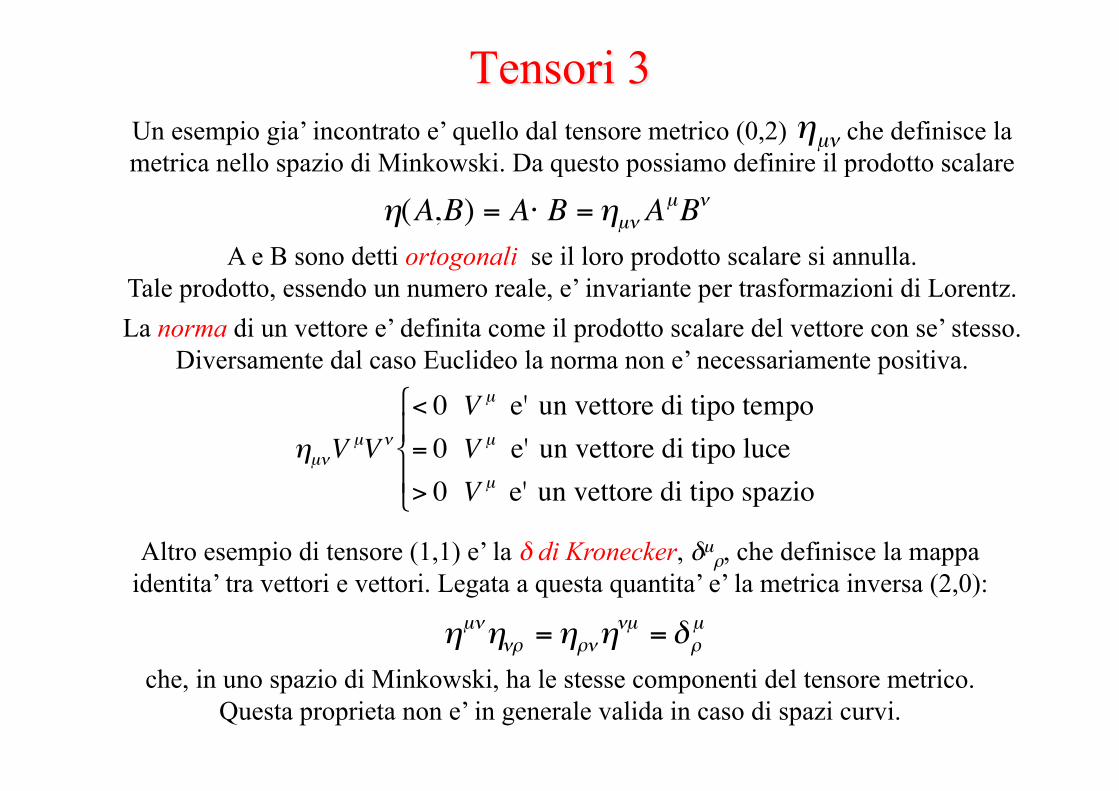
Un esempio gia’ incontrato e’ quello dal tensore metrico (0,2) che definisce la metrica nello spazio di Minkowski. Da questo possiamo definire il prodotto scalare
€
ηµν
Altro esempio di tensore (1,1) e’ la δ di Kronecker, δµρ, che definisce la mappa
identita’ tra vettori e vettori. Legata a questa quantita’ e’ la metrica inversa (2,0): €
ηµνVµV ν
< 0 V µ
= 0 V µ
> 0 V µ
⎧
⎨ ⎪
⎩ ⎪
e' un vettore di tipo tempo e' un vettore di tipo luce e' un vettore di tipo spazio
€
η(A,B) = A⋅ B =ηµν AµBν
A e B sono detti ortogonali se il loro prodotto scalare si annulla. Tale prodotto, essendo un numero reale, e’ invariante per trasformazioni di Lorentz. La norma di un vettore e’ definita come il prodotto scalare del vettore con se’ stesso.
Diversamente dal caso Euclideo la norma non e’ necessariamente positiva.
€
ηµνηνρ =ηρνηνµ = δρ
µ che, in uno spazio di Minkowski, ha le stesse componenti del tensore metrico.
Questa proprieta non e’ in generale valida in caso di spazi curvi.
Definiamo operazioni “permesse” quelle che trasformano tensori in altri tensori. Ovviamente si possono anche eseguire altre operazioni che pero’, in generale, hanno
una validita’ solamente locale e non mantengono la natura tensoriale dell’oggetto. Una importante operazione permessa e’ la contrazione. Essa trasforma un tensore
(k,l) in uno (k-1,l-1) sommando su un indice in alto e su uno in basso:
€
Sµρσ = T µνρ
σν T µνρσν ≠ T µρν
σν
dove la seconda diseguaglianza indica che l’ordine degli indici conta.
Infine nello spazio di Minkowski e’ possibile definire la derivata parziale di un tensore (che e’ pure un tensore).
€
∂αRµν = Tα
µν
Il tesore metrico puo’ essere usato per alzare o abbassare gli indici
€
Tαβµδ =ηµνTαβνδ Tµ
βγδ =ηµαT
αβγδ
Questa operazione non modifica la posizione relativa degli indici. Questa operazione trasforma vettori in vettori duali e viceversa
€
Vδ =ηδαVα wβ =ηβνwν
Si definiscono tensori simmetrici in n indici quelli che non varano scambiando n indici tra loro. In modo analogo si definiscono i tensori antisimmetrici.
Le rappresentazioni dei tensori dipendono dal sistema di coordinate utilizzato. La natura e le relazioni tra tensori non dipendono dal sistema di coordinate.
€
ηµνUµUν = −1
Ovvero la quadrivelocita’ e’ automaticamente normalizzata e costante in tutto lo spazio-tempo. La sua norma e’ negativa essendo un vettore di tipo tempo.
Nel sistema di riferimento della particella le componenti della quadrivelocita’ sono
Consideriamo una particella che si muove su una traiettoria di tipo tempo. In questo caso e’ conveniente parametrizzare la sua linea di mondo utilizzando il tempo proprio, xµ(τ). In questo caso il vettore tangente e’ detto quadrivelocita’.
€
U µ = (1,0,0,0)
€
U µ =dxµ
dτ
€
dτ 2 = −ηµν dxµdxνDal momento che allora
Nel sistema della particella vale che €
pµ = m dxµ
dτ= mU µ
€
pi = 0 E = p0 = m =c=1mc 2
In un sistema in moto uniforme possiamo definire la norma del quadrimomento:
€
pµ = (γm,γmv,0,0); γ =1/ 1− v 2 v<<1⎯ → ⎯ ⎯ p0 = m +
12mv 2
p1 = mv
⎧ ⎨ ⎪
⎩ ⎪
Dalla quadrivelocita’ definiamo il quadrimomento di una particella come:
Dove m definisce la massa a riposo della particella (invariante). L’energia della particella e’ definita come la componente di tipo tempo
del quadrimomento E=p0 e pertanto non si conserva.
Ovvero la famosa relazione E=mc2
E le componenti di pµ possono essere ottenute attraverso una trasformazione di Lorentz. Se consideriamo un il caso particolare si una particella che si muove con 3-velocita’ v
lungo l’asse x, abbiamo €
pµ pµ = −m2; E = m2 +p2 ; p2 = δ ij p
i p j
Il quadrimomento caratterizza completamente energia e momento di una singola particella. Tuttavia, i sistemi fisici sono tipicamente composti da molte particelle. In questo caso, anziche’ specificare i singoli quadrimomenti delle particelle e’ piu’ conveniente descrivere il sistema come un fluido, ovvero come un mezzo continuo
caratterizzato da variabili macroscopiche quali pressione, densita’ entropia etc. Benche’ il fluido sia composto da molte particelle con le loro qudrivelocita’, possiamo definire un campo di quadrivelocita’ per il fluido nel suo insieme.
Un singolo campo quadrivettoriale e’ tuttavia insufficiente per descrivere le proprieta’ energetiche del fluido. Dobbiamo infatti andare oltre e definire il
Tensore Energia-Momento (detto anche Tensore Stress-Energia) Tµν.
Questo e’ un tensore di ordine (2,0), simmetrico, che contiene tutte le informazioni relative agli aspetti energetici del sistema: densita’ di energia, pressione, stress, ecc.
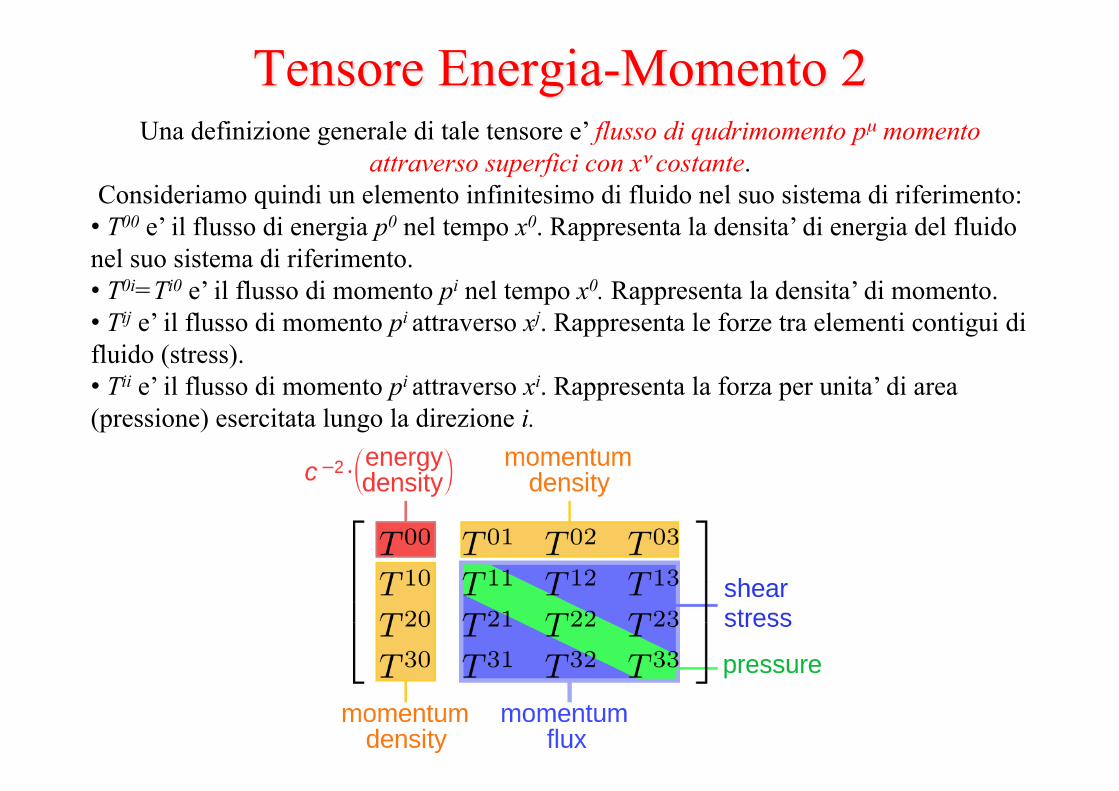
Una definizione generale di tale tensore e’ flusso di qudrimomento pµ momento attraverso superfici con xν costante.
Consideriamo quindi un elemento infinitesimo di fluido nel suo sistema di riferimento: • T00 e’ il flusso di energia p0 nel tempo x0. Rappresenta la densita’ di energia del fluido nel suo sistema di riferimento. • T0i=Ti0 e’ il flusso di momento pi nel tempo x0. Rappresenta la densita’ di momento. • Tij e’ il flusso di momento pi attraverso xj. Rappresenta le forze tra elementi contigui di fluido (stress). • Tii e’ il flusso di momento pi attraverso xi. Rappresenta la forza per unita’ di area (pressione) esercitata lungo la direzione i.
Si noti che, come ci si aspetta, la pressione e’ nulla in ogni direzione.
Consideriamo il caso di un fluido di “polvere” ovvero composto da particelle di materia con velocita’ relativa nulla. In questo caso il campo di quadrivelocita’
coincide con la quadrivelocita’ Uµ di ogni particella. Definiamo il quadrivettore flusso del numero di particelle Nµ=nUµ dove n
rappresenta la densita’ numerica di particelle misurata nel loro sistema di rifermento.
N0 rappresenta la densita’ di particelle misurata in ogni altro sistema di riferimento mentre Nι e’ il flusso di particelle lungo la direzione xi.
Assumiamo che le particelle abbiano tutte la tesssa massa m Ιn questo caso ρ=mn rappresenta la densita’ di energia della polvere misurata nel
sistema delle particelle. Per definizione la densita’ di energia caratterizza completamente un fluido di polvere. ρ e’ il suo valore nel sistema delle particlle.
Notiamo che m ed n rappresentano le 0-componenti dei quadrivettori Nµ=(n,0,0,0) e pµ=(m,0,0,0). Quindi ρ e’ la componente 0-0 del tensore
sempre misurata nel sistema a riposo. E’ quindi naturale definire il tensore energia-momento per un fluido di polvere nel seguente modo:
€
T µη ≡ pµNν = mnU µUν = ρU µUν
€
p⊗N
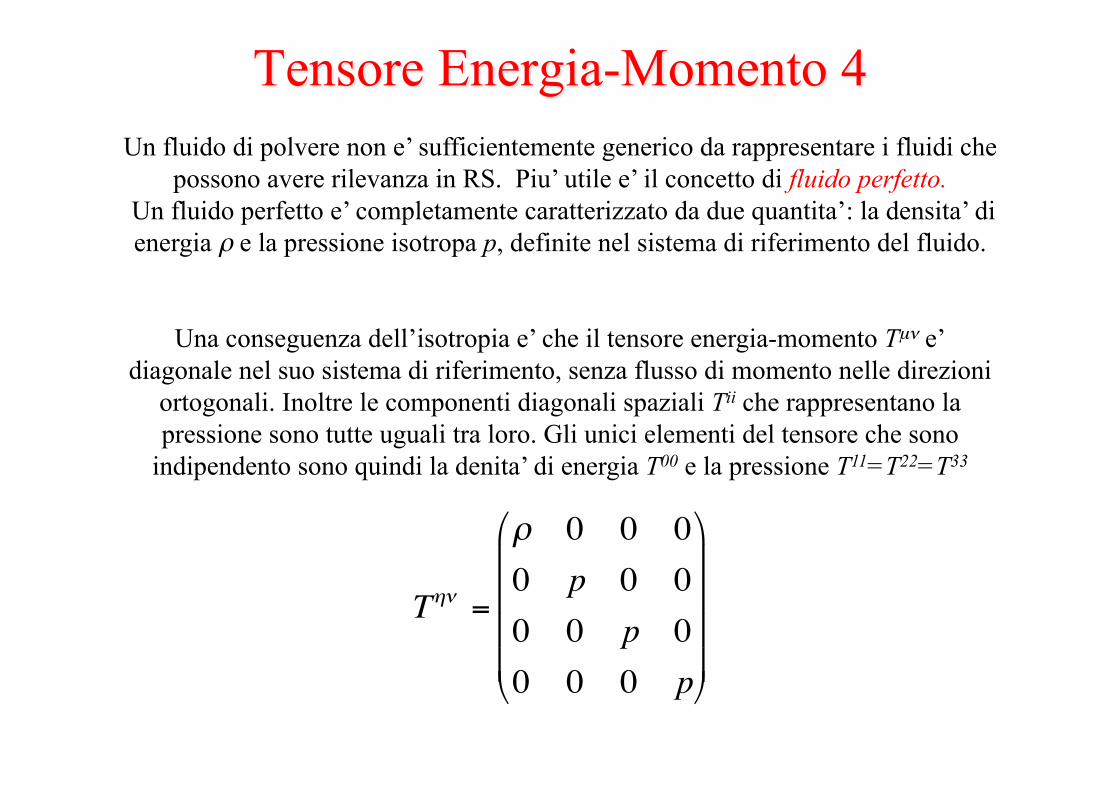
Un fluido di polvere non e’ sufficientemente generico da rappresentare i fluidi che possono avere rilevanza in RS. Piu’ utile e’ il concetto di fluido perfetto.
Un fluido perfetto e’ completamente caratterizzato da due quantita’: la densita’ di energia ρ e la pressione isotropa p, definite nel sistema di riferimento del fluido.
Una conseguenza dell’isotropia e’ che il tensore energia-momento Tµν e’ diagonale nel suo sistema di riferimento, senza flusso di momento nelle direzioni
ortogonali. Inoltre le componenti diagonali spaziali Tii che rappresentano la pressione sono tutte uguali tra loro. Gli unici elementi del tensore che sono
indipendento sono quindi la denita’ di energia T00 e la pressione T11=T22=T33
€
Tην =
ρ 0 0 00 p 0 00 0 p 00 0 0 p
⎛
⎝
⎜ ⎜ ⎜ ⎜
⎞
⎠
⎟ ⎟ ⎟ ⎟
Vogliamo ora generalizzare al caso di un sistema di riferimento qualunque.
€
T µη = (p + ρ)U µUν + pηµν
€
∂µTµν = 0
ν = 0→continuityν ≠ 0→Euler
⎧ ⎨ ⎩
€
Tmν = (p + ρ)U µUν
a questo punto pero’ basta aggiungere
Il tensore energia-momento ha l’ulteriore, importante proprieta’ di essere conservato
ovvero di avere divergenza nulla
€
T µη = ρU µUνSe per la polvere allora un’ipotesi e’
Che pero’ nel sistema di riferimento del fluido corrisponde a
€
Tην =
ρ + p 0 0 00 0 0 00 0 0 00 0 0 0
⎛
⎝
⎜ ⎜ ⎜ ⎜
⎞
⎠
⎟ ⎟ ⎟ ⎟
€
pηην =
−p 0 0 00 p 0 00 0 p 00 0 0 p
⎛
⎝
⎜ ⎜ ⎜ ⎜
⎞
⎠
⎟ ⎟ ⎟ ⎟
Per ottenere il tensore Energia Momento del fluido perfetto
Le caratteristiche di un particolare fluido perfetto e la sua evoluzione sono determinate dall’equazione di stato p(ρ)
€
p = 0 polverep = ρ 3 fotoni






![Filtro IIR di ordine 1 - iet.unipi.it · Filtro IIR di ordine 1 hn un[] []= ... e confrontarlo con la DSP teorica. Parametri: Intervallo temporale discreto di osservazione: N=2048](https://static.fdocument.org/doc/165x107/5b8269a57f8b9ae97b8e5a9a/filtro-iir-di-ordine-1-ietunipiit-filtro-iir-di-ordine-1-hn-un-.jpg)