SOLID MECHANICSpiet/edu/som/pdf/somsht1516_3.pdf · Elasticity models σ ε constitutive equation...
54
SOLID MECHANICS Piet Schreurs Department of Mechanical Engineering Eindhoven University of Technology http://www.mate.tue.nl/∼piet 2015/2016 March 11, 2016
Transcript of SOLID MECHANICSpiet/edu/som/pdf/somsht1516_3.pdf · Elasticity models σ ε constitutive equation...
SOLID MECHANICS
Piet Schreurs
Department of Mechanical EngineeringEindhoven University of Technology
http://www.mate.tue.nl/∼piet
2015/2016
March 11, 2016
INDEX
Nonlinear deformation
One-dimensional material behavior
Elastic
Elastoplastic
Piet Schreurs (TU/e) 2 / 54
NONLINEAR TRUSS
back to index
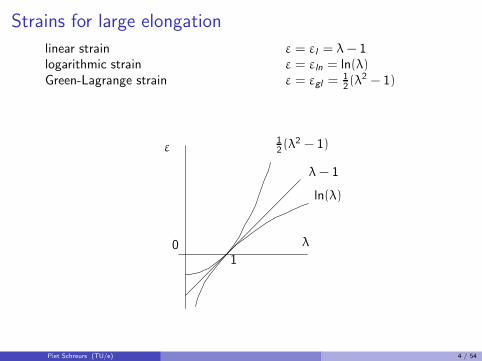
Strains for large elongation
linear strain ε = εl = λ − 1logarithmic strain ε = εln = ln(λ)
Green-Lagrange strain ε = εgl = 12(λ2 − 1)
12 (λ2 − 1)
λ − 1
ln(λ)
ε
λ
10
Piet Schreurs (TU/e) 4 / 54
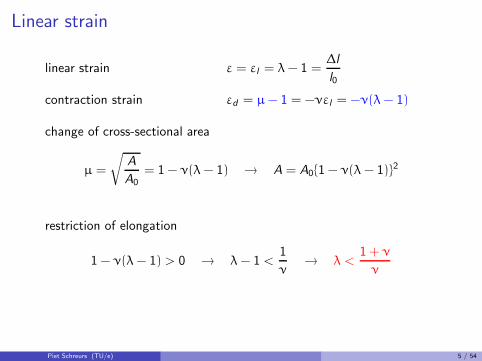
Linear strain
linear strain ε = εl = λ − 1 =∆l
l0
contraction strain εd = µ − 1 = −νεl = −ν(λ − 1)
change of cross-sectional area
µ =
√
A
A0= 1 − ν(λ − 1) → A = A0{1 − ν(λ − 1)}2
restriction of elongation
1 − ν(λ − 1) > 0 → λ − 1 <1
ν→ λ <
1 + ν
ν
Piet Schreurs (TU/e) 5 / 54
Logarithmic strain
logarithmic strain ε = εln = ln(λ)
contraction strain εd = ln(µ) = −νεln = −ν lnλ
change of cross-sectional area
µ =
√
A
A0= e−νεln = e−ν ln(λ) =
[
e ln(λ)]−ν
= λ−ν →
A = A0λ−2ν
NB : ln(x) = e log(x) = y → x = ey
Piet Schreurs (TU/e) 6 / 54
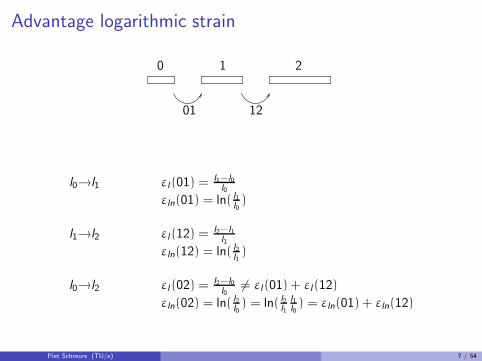
Advantage logarithmic strain
1 2
01 12
0
l0→l1 εl (01) = l1−l0l0
εln(01) = ln( l1l0)
l1→l2 εl (12) = l2−l1l1
εln(12) = ln( l2l1)
l0→l2 εl (02) = l2−l0l0
6= εl(01) + εl(12)
εln(02) = ln( l2l0) = ln( l2
l1
l1l0) = εln(01) + εln(12)
Piet Schreurs (TU/e) 7 / 54
Green-Lagrange strain
Green-Lagrange strain ε = εgl = 12 (λ2 − 1)
contraction strain εd = 12 (µ2 − 1) = −νεln = −ν 1
2 (λ2 − 1)
change of cross-sectional area
1 − ν(λ2 − 1) > 0 → λ <
√
1 + ν
ν
Piet Schreurs (TU/e) 8 / 54
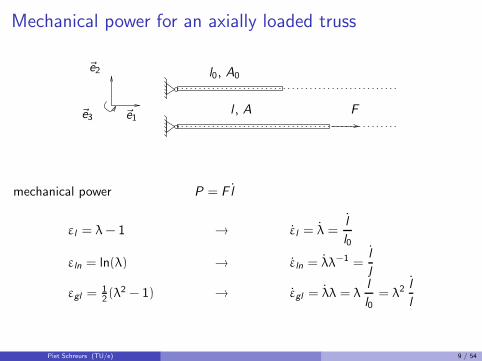
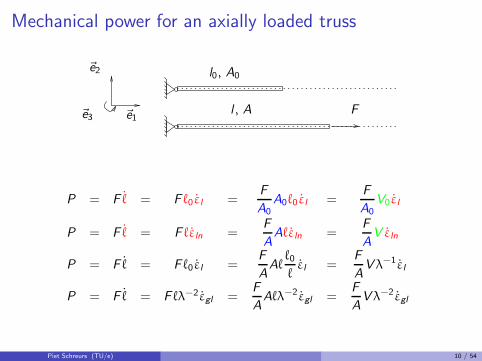
Mechanical power for an axially loaded truss
l0, A0
l , A F~e1
~e2
~e3
mechanical power P = F l
εl = λ − 1 → εl = λ =l
l0
εln = ln(λ) → εln = λλ−1 =l
l
εgl = 12 (λ2 − 1) → εgl = λλ = λ
l
l0= λ2 l
l
Piet Schreurs (TU/e) 9 / 54
Mechanical power for an axially loaded truss
l0, A0
l , A F~e1
~e2
~e3
P = F ℓ = F ℓ0εl =F
A0A0ℓ0εl =
F
A0V0εl
P = F ℓ = F ℓεln =F
AAℓεln =
F
AV εln
P = F ℓ = F ℓ0εl =F
AAℓ
ℓ0
ℓεl =
F
AVλ−1εl
P = F ℓ = F ℓλ−2εgl =F
AAℓλ−2εgl =
F
AVλ−2εgl
Piet Schreurs (TU/e) 10 / 54
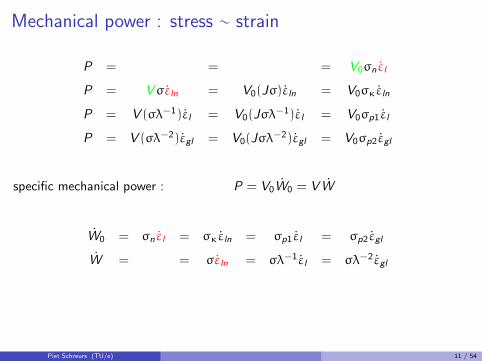
Mechanical power : stress ∼ strain
P = = = V0σn εl
P = Vσεln = V0(Jσ)εln = V0σκεln
P = V (σλ−1)εl = V0(Jσλ−1)εl = V0σp1εl
P = V (σλ−2)εgl = V0(Jσλ−2)εgl = V0σp2εgl
specific mechanical power : P = V0W0 = VW
W0 = σn εl = σκεln = σp1εl = σp2εgl
W = = σεln = σλ−1εl = σλ−2εgl
Piet Schreurs (TU/e) 11 / 54
SOLUTION PROCEDURE
back to index
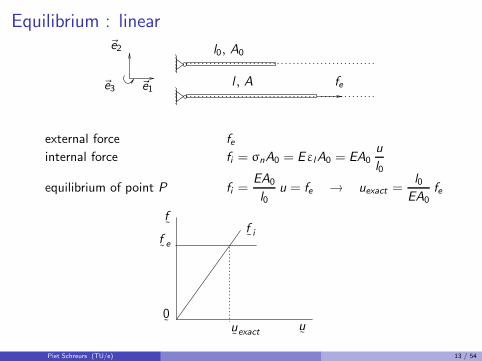
Equilibrium : linear
l0, A0
l , A fe~e1
~e2
~e3
external force fe
internal force fi = σnA0 = EεlA0 = EA0u
l0
equilibrium of point P fi =EA0
l0u = fe → uexact =
l0
EA0fe
f˜
if˜
e
f˜
u˜
u˜
exact
0˜
Piet Schreurs (TU/e) 13 / 54
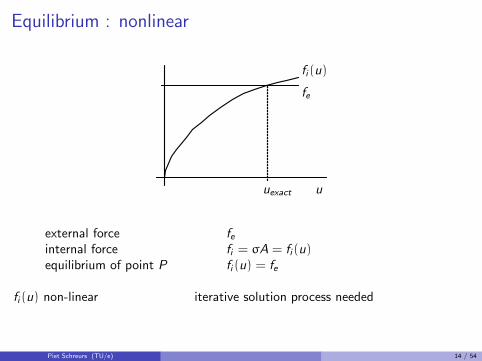
Equilibrium : nonlinear
u
fi (u)
fe
uexact
external force feinternal force fi = σA = fi (u)
equilibrium of point P fi (u) = fe
fi (u) non-linear iterative solution process needed
Piet Schreurs (TU/e) 14 / 54
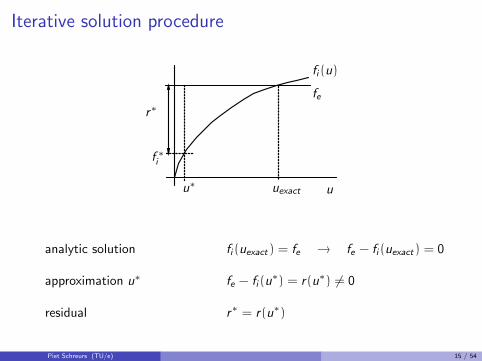
Iterative solution procedure
uu∗
f ∗i
fi (u)
r∗fe
uexact
analytic solution fi (uexact ) = fe → fe − fi (uexact) = 0
approximation u∗ fe − fi (u∗) = r(u∗) 6= 0
residual r∗ = r(u∗)
Piet Schreurs (TU/e) 15 / 54
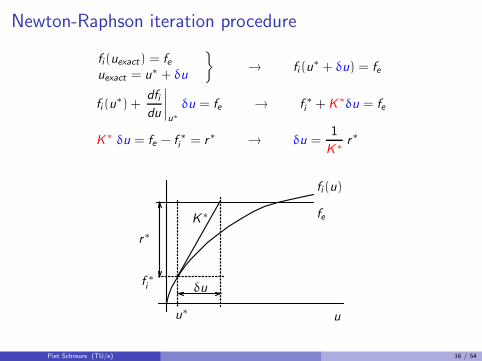
Newton-Raphson iteration procedure
fi (uexact) = feuexact = u∗ + δu
}
→ fi (u∗ + δu) = fe
fi (u∗) +
dfi
du
∣
∣
∣
∣
u∗
δu = fe → f ∗
i + K ∗δu = fe
K ∗ δu = fe − f ∗i = r∗ → δu =1
K ∗r∗
u
δu
u∗
K ∗
f ∗
i
fi (u)
fe
r∗
Piet Schreurs (TU/e) 16 / 54
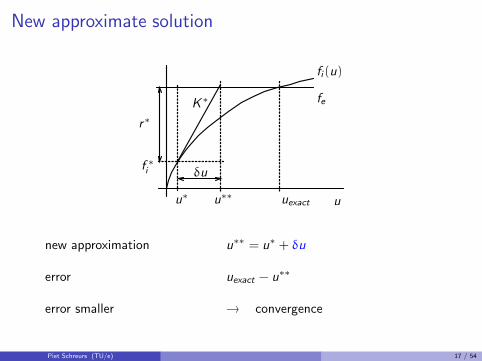
New approximate solution
uexact
δu
u∗
K ∗
f ∗
i
fi (u)
fe
r∗
uu∗∗
new approximation u∗∗ = u∗ + δu
error uexact − u∗∗
error smaller → convergence
Piet Schreurs (TU/e) 17 / 54
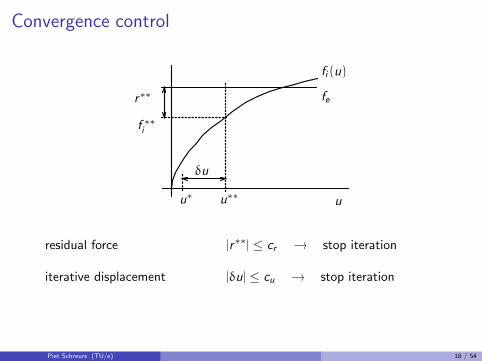
Convergence control
δu
u∗
fi (u)
r∗∗
u
fe
f ∗∗i
u∗∗
residual force |r∗∗| ≤ cr → stop iteration
iterative displacement |δu| ≤ cu → stop iteration
Piet Schreurs (TU/e) 18 / 54
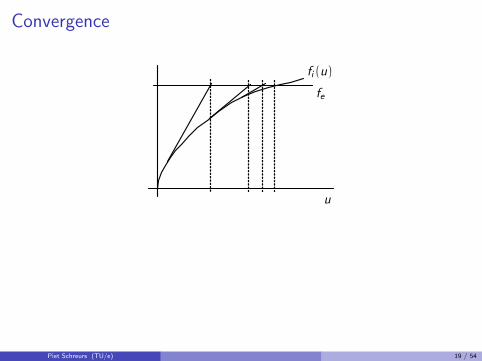
Convergence
u
fi (u)
fe
Piet Schreurs (TU/e) 19 / 54
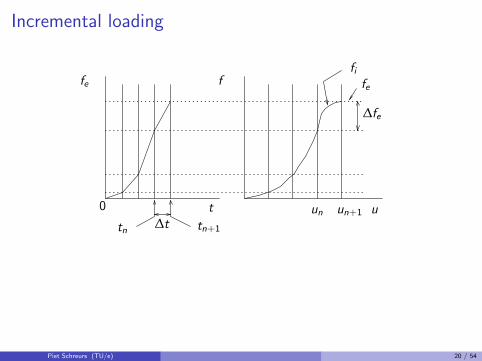
Incremental loading
fe
t0
fife
tn tn+1∆t
∆fe
f
un un+1 u
Piet Schreurs (TU/e) 20 / 54
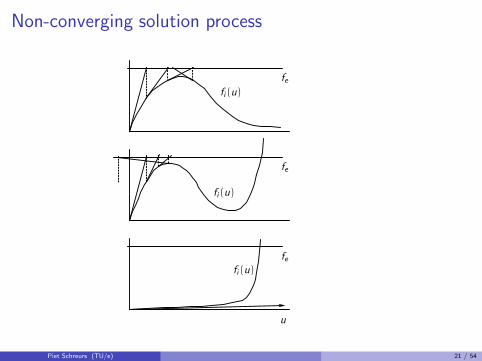
Non-converging solution process
fi (u)
fe
u
fe
fi (u)
fi (u)
fe
Piet Schreurs (TU/e) 21 / 54
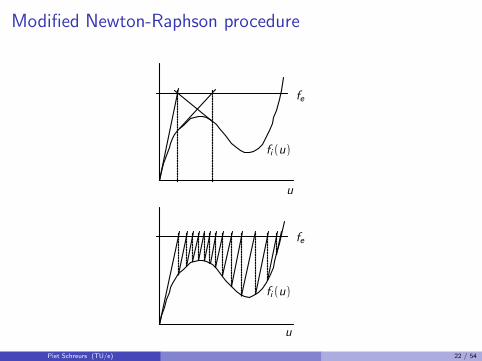
Modified Newton-Raphson procedure
u
u
fi (u)
fi (u)
fe
fe
Piet Schreurs (TU/e) 22 / 54
ONE-DIMENSIONAL MATERIAL BEHAVIOR
back to index
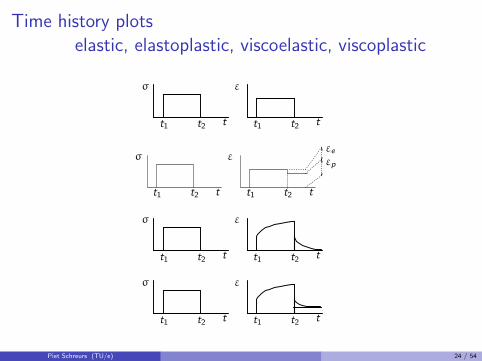
Time history plots
elastic, elastoplastic, viscoelastic, viscoplastic
t t
ε
t2
σ
t1 t2 t1
t t
εσ
t1 t2 t1 t2
εe
εp
t t2 t
εσ
t1 t2 t1
t2t t
εσ
t1 t2 t1
Piet Schreurs (TU/e) 24 / 54
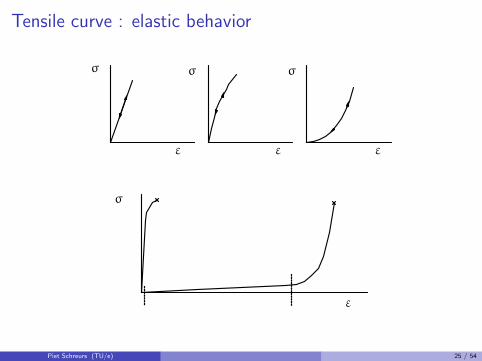
Tensile curve : elastic behavior
σ
ε
σ
ε
σ
ε
ε
σ
Piet Schreurs (TU/e) 25 / 54
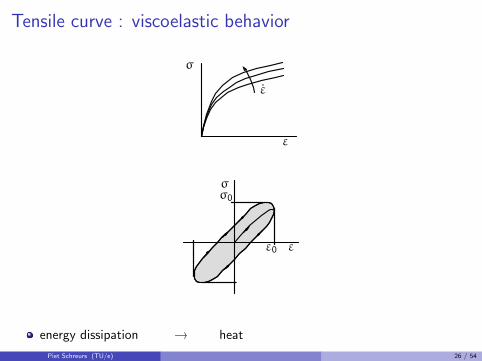
Tensile curve : viscoelastic behavior
ε
ε
σ
ε
σ
ε0
σ0
energy dissipation → heat
Piet Schreurs (TU/e) 26 / 54
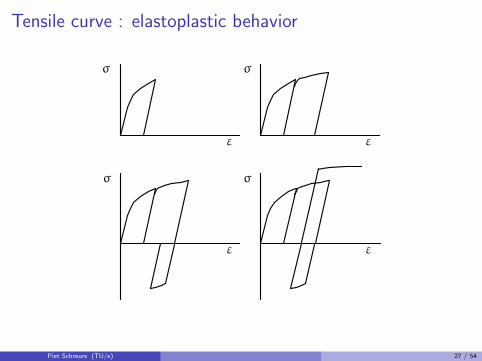
Tensile curve : elastoplastic behavior
σ
εε
σσ
σ
ε ε
Piet Schreurs (TU/e) 27 / 54
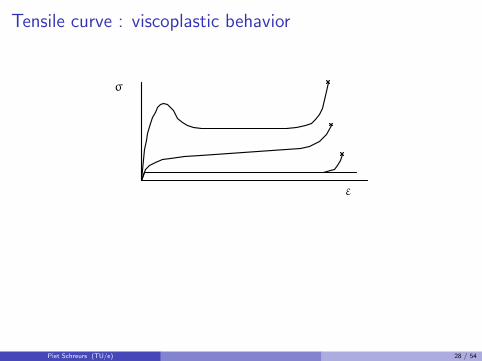
Tensile curve : viscoplastic behavior
ε
σ
Piet Schreurs (TU/e) 28 / 54
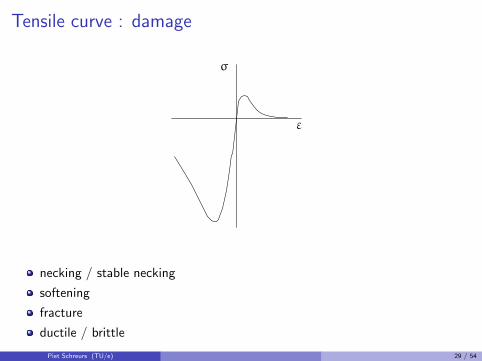
Tensile curve : damage
ε
σ
necking / stable necking
softening
fracture
ductile / brittle
Piet Schreurs (TU/e) 29 / 54
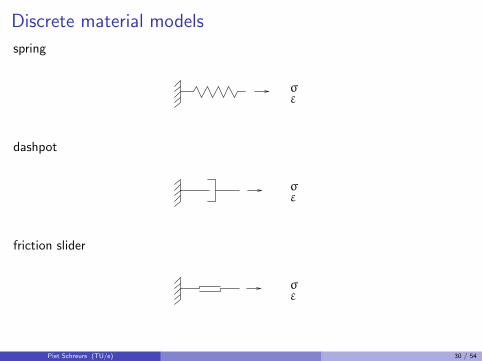
Discrete material models
spring
σε
dashpot
σε
friction slider
σε
Piet Schreurs (TU/e) 30 / 54
ELASTIC
back to index
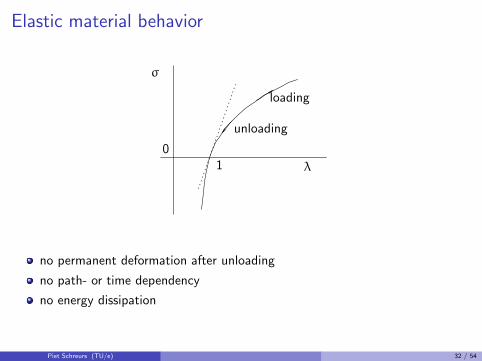
Elastic material behavior
unloading
loading
0
σ
λ1
no permanent deformation after unloading
no path- or time dependency
no energy dissipation
Piet Schreurs (TU/e) 32 / 54
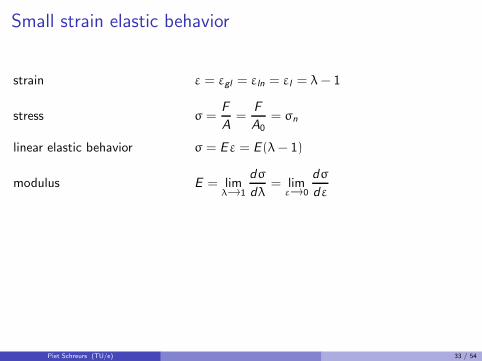
Small strain elastic behavior
strain ε = εgl = εln = εl = λ − 1
stress σ =F
A=
F
A0= σn
linear elastic behavior σ = Eε = E (λ − 1)
modulus E = limλ→1
dσ
dλ= lim
ε→0
dσ
dε
Piet Schreurs (TU/e) 33 / 54
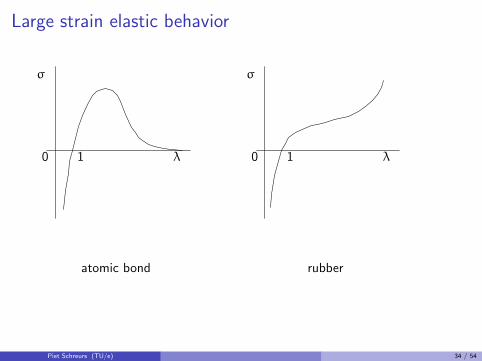
Large strain elastic behavior
σ
0 1 λ
atomic bond
σ
0 1 λ
rubber
Piet Schreurs (TU/e) 34 / 54
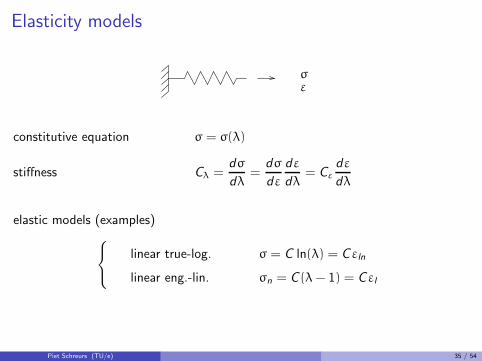
Elasticity models
σε
constitutive equation σ = σ(λ)
stiffness Cλ =dσ
dλ=
dσ
dε
dε
dλ= Cε
dε
dλ
elastic models (examples)
linear true-log. σ = C ln(λ) = Cεln
linear eng.-lin. σn = C (λ − 1) = Cεl
Piet Schreurs (TU/e) 35 / 54
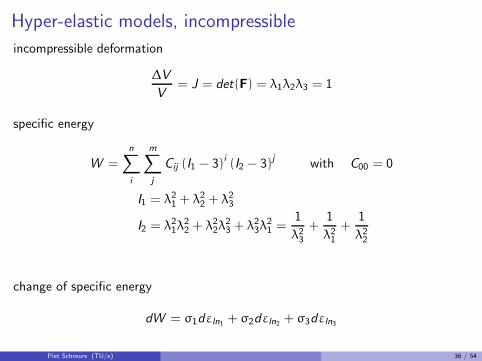
Hyper-elastic models, incompressible
incompressible deformation
∆V
V= J = det(F) = λ1λ2λ3 = 1
specific energy
W =
n∑
i
m∑
j
Cij (I1 − 3)i(I2 − 3)
jwith C00 = 0
I1 = λ21 + λ2
2 + λ23
I2 = λ21λ
22 + λ2
2λ23 + λ2
3λ21 =
1
λ23
+1
λ21
+1
λ22
change of specific energy
dW = σ1dεln1 + σ2dεln2 + σ3dεln3
Piet Schreurs (TU/e) 36 / 54
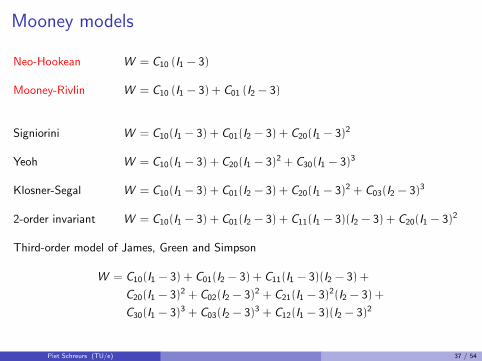
Mooney models
Neo-Hookean W = C10 (I1 − 3)
Mooney-Rivlin W = C10 (I1 − 3) + C01 (I2 − 3)
Signiorini W = C10(I1 − 3) + C01(I2 − 3) + C20(I1 − 3)2
Yeoh W = C10(I1 − 3) + C20(I1 − 3)2 + C30(I1 − 3)3
Klosner-Segal W = C10(I1 − 3) + C01(I2 − 3) + C20(I1 − 3)2 + C03(I2 − 3)3
2-order invariant W = C10(I1 − 3) + C01(I2 − 3) + C11(I1 − 3)(I2 − 3) + C20(I1 − 3)2
Third-order model of James, Green and Simpson
W = C10(I1 − 3) + C01(I2 − 3) + C11(I1 − 3)(I2 − 3) +
C20(I1 − 3)2 + C02(I2 − 3)2 + C21(I1 − 3)2(I2 − 3) +
C30(I1 − 3)3 + C03(I2 − 3)3 + C12(I1 − 3)(I2 − 3)2
Piet Schreurs (TU/e) 37 / 54
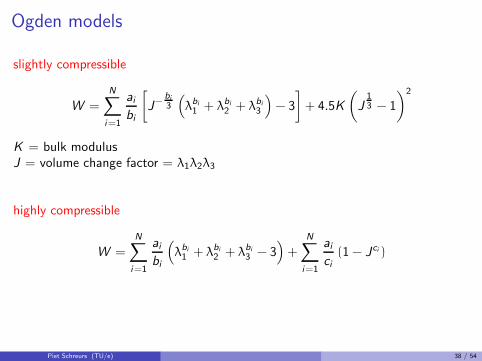
Ogden models
slightly compressible
W =
N∑
i=1
ai
bi
[
J−bi
3
(
λbi
1 + λbi
2 + λbi
3
)
− 3
]
+ 4.5K
(
J13 − 1
)2
K = bulk modulusJ = volume change factor = λ1λ2λ3
highly compressible
W =
N∑
i=1
ai
bi
(
λbi
1 + λbi
2 + λbi
3 − 3)
+
N∑
i=1
ai
ci
(1 − Jci )
Piet Schreurs (TU/e) 38 / 54
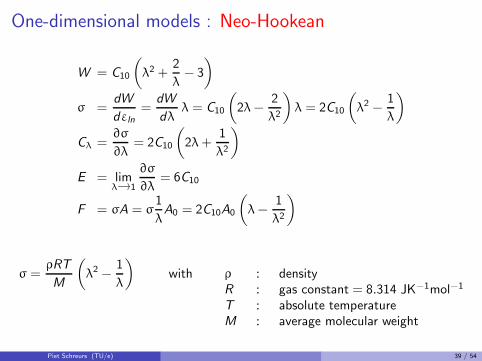
One-dimensional models : Neo-Hookean
W = C10
(
λ2 +2
λ− 3
)
σ =dW
dεln
=dW
dλλ = C10
(
2λ −2
λ2
)
λ = 2C10
(
λ2 −1
λ
)
Cλ =∂σ
∂λ= 2C10
(
2λ +1
λ2
)
E = limλ→1
∂σ
∂λ= 6C10
F = σA = σ1
λA0 = 2C10A0
(
λ −1
λ2
)
σ =ρRT
M
(
λ2 −1
λ
)
with ρ : densityR : gas constant = 8.314 JK−1mol−1
T : absolute temperatureM : average molecular weight
Piet Schreurs (TU/e) 39 / 54
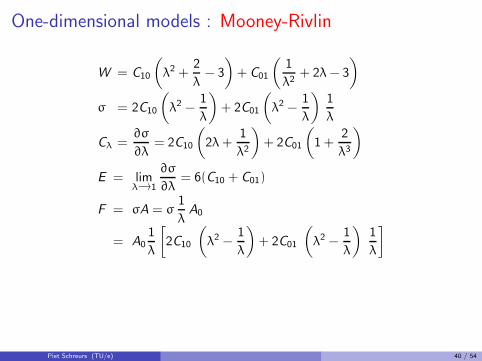
One-dimensional models : Mooney-Rivlin
W = C10
(
λ2 +2
λ− 3
)
+ C01
(
1
λ2+ 2λ − 3
)
σ = 2C10
(
λ2 −1
λ
)
+ 2C01
(
λ2 −1
λ
)
1
λ
Cλ =∂σ
∂λ= 2C10
(
2λ +1
λ2
)
+ 2C01
(
1 +2
λ3
)
E = limλ→1
∂σ
∂λ= 6(C10 + C01)
F = σA = σ1
λA0
= A01
λ
[
2C10
(
λ2 −1
λ
)
+ 2C01
(
λ2 −1
λ
)
1
λ
]
Piet Schreurs (TU/e) 40 / 54
ELASTOPLASTIC
back to index
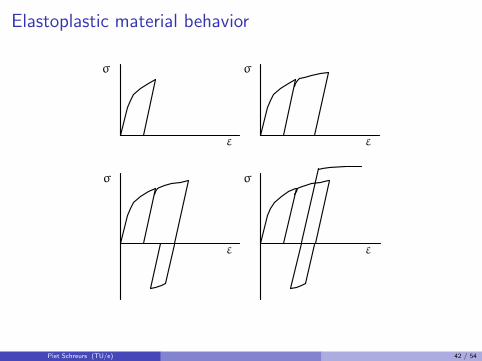
Elastoplastic material behavior
σ
εε
σσ
σ
ε ε
Piet Schreurs (TU/e) 42 / 54
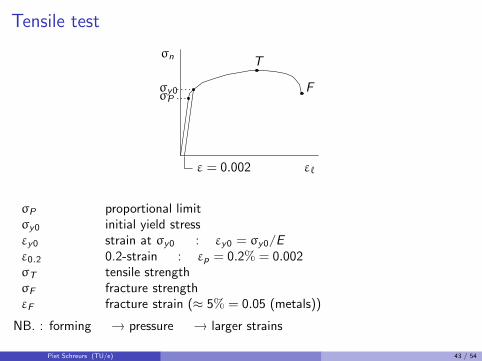
Tensile test
T
F
ε = 0.002 εℓ
σn
σPσy0
σP proportional limitσy0 initial yield stressεy0 strain at σy0 : εy0 = σy0/E
ε0.2 0.2-strain : εp = 0.2% = 0.002σT tensile strengthσF fracture strengthεF fracture strain (≈ 5% = 0.05 (metals))
NB. : forming → pressure → larger strains
Piet Schreurs (TU/e) 43 / 54
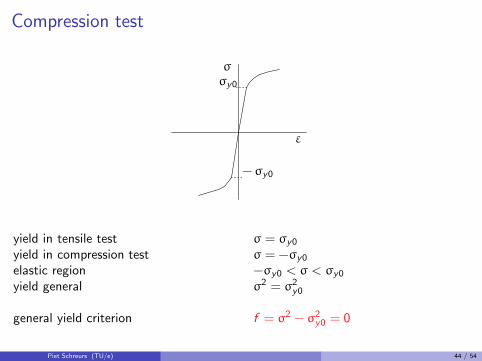
Compression test
σ
ε
σy0
− σy0
yield in tensile test σ = σy0
yield in compression test σ = −σy0
elastic region −σy0 < σ < σy0
yield general σ2 = σ2y0
general yield criterion f = σ2 − σ2y0 = 0
Piet Schreurs (TU/e) 44 / 54
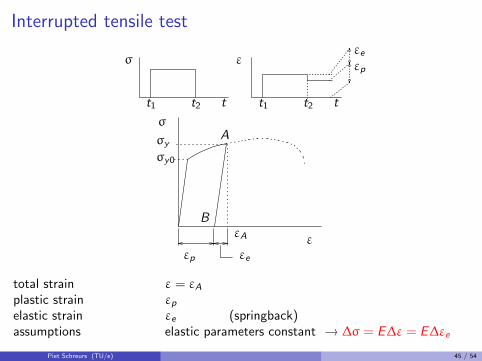
Interrupted tensile test
t t
εσ
t1 t2 t1 t2
εe
εp
ε
σ
σy0
εeεp
εA
A
B
σy
total strain ε = εA
plastic strain εp
elastic strain εe (springback)assumptions elastic parameters constant → ∆σ = E∆ε = E∆εe
Piet Schreurs (TU/e) 45 / 54
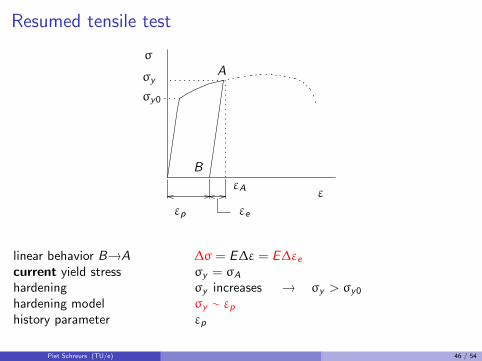
Resumed tensile test
ε
σ
σy0
εeεp
εA
A
B
σy
linear behavior B→A ∆σ = E∆ε = E∆εe
current yield stress σy = σA
hardening σy increases → σy > σy0
hardening model σy ∼ εp
history parameter εp
Piet Schreurs (TU/e) 46 / 54
Hardening
A
B
A ′
Y0
Y ′
0
0ε
σ
q
A ′
Aσ
0
Y ′
0
Y0
B
C
ε
σy0
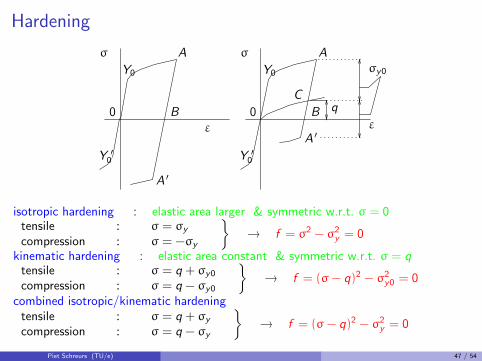
isotropic hardening : elastic area larger & symmetric w.r.t. σ = 0tensile : σ = σy
compression : σ = −σy
}
→ f = σ2 − σ2y = 0
kinematic hardening : elastic area constant & symmetric w.r.t. σ = qtensile : σ = q + σy0
compression : σ = q − σy0
}
→ f = (σ − q)2 − σ2y0 = 0
combined isotropic/kinematic hardeningtensile : σ = q + σy
compression : σ = q − σy
}
→ f = (σ − q)2 − σ2y = 0
Piet Schreurs (TU/e) 47 / 54
Effective plastic strain
ε
t
A
B
CD
C
E
E
σ
ε
A
B
D
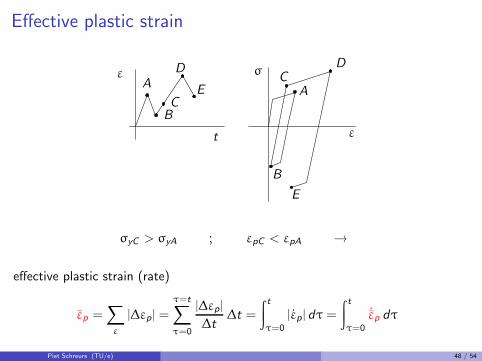
σyC > σyA ; εpC < εpA →
effective plastic strain (rate)
εp =∑
ε
|∆εp | =
τ=t∑
τ=0
|∆εp |
∆t∆t =
∫ t
τ=0
|εp | dτ =
∫ t
τ=0
˙εp dτ
Piet Schreurs (TU/e) 48 / 54
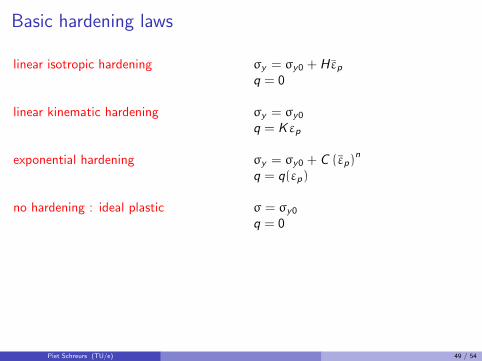
Basic hardening laws
linear isotropic hardening σy = σy0 + H εp
q = 0
linear kinematic hardening σy = σy0
q = Kεp
exponential hardening σy = σy0 + C (εp)n
q = q(εp)
no hardening : ideal plastic σ = σy0
q = 0
Piet Schreurs (TU/e) 49 / 54
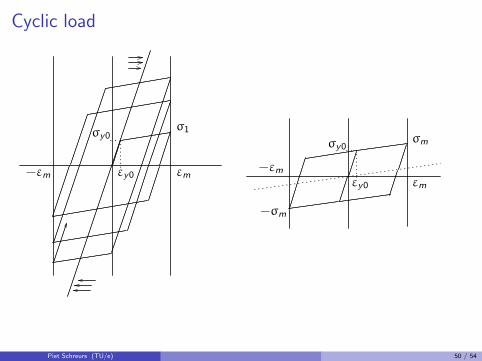
Cyclic load
εy0
σy0
εm
σ1
−εmεm
σm
εy0
σy0
−εm
−σm
Piet Schreurs (TU/e) 50 / 54
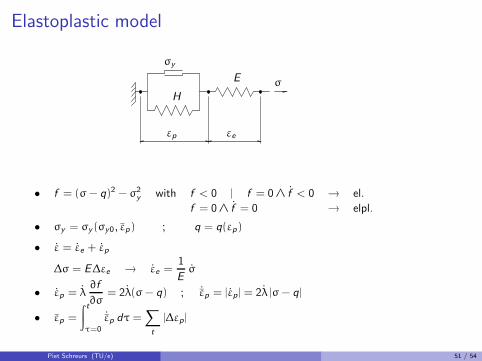
Elastoplastic model
H
σy
εeεp
σE
• f = (σ − q)2 − σ2y with f < 0 | f = 0 ∧ f < 0 → el.
f = 0 ∧ f = 0 → elpl.
• σy = σy (σy0, εp) ; q = q(εp)
• ε = εe + εp
∆σ = E∆εe → εe =1
Eσ
• εp = λ∂f
∂σ= 2λ(σ − q) ; ˙εp = |εp | = 2λ |σ − q|
• εp =
∫ t
τ=0
˙εp dτ =∑
t
|∆εp |
Piet Schreurs (TU/e) 51 / 54
Constitutive equations
σ = E εe = E (ε − εp) = E {ε − 2λ(σ − q)}
f = 0
→
σ + 2E (σ − q)λ − E ε = 0
f (σ, λ) = 0
implicit solution procedure
explicit solution procedure
Piet Schreurs (TU/e) 52 / 54
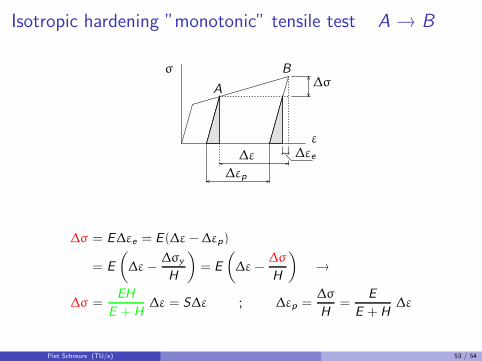
Isotropic hardening ”monotonic” tensile test A → B
∆εe
∆σσ
ε
∆ε
A
B
∆εp
∆σ = E∆εe = E (∆ε − ∆εp)
= E
(
∆ε −∆σy
H
)
= E
(
∆ε −∆σ
H
)
→
∆σ =EH
E + H∆ε = S∆ε ; ∆εp =
∆σ
H=
E
E + H∆ε
Piet Schreurs (TU/e) 53 / 54
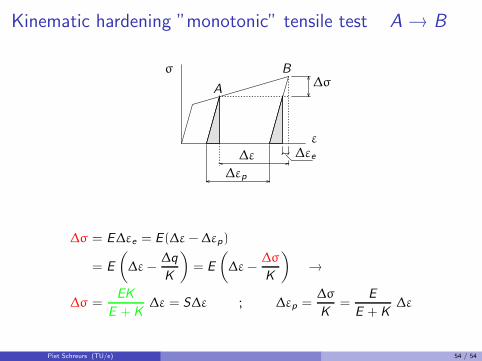
Kinematic hardening ”monotonic” tensile test A → B
∆εe
∆σσ
ε
∆ε
A
B
∆εp
∆σ = E∆εe = E (∆ε − ∆εp)
= E
(
∆ε −∆q
K
)
= E
(
∆ε −∆σ
K
)
→
∆σ =EK
E + K∆ε = S∆ε ; ∆εp =
∆σ
K=
E
E + K∆ε
Piet Schreurs (TU/e) 54 / 54





![SergiyKoshkin Email: arXiv:0907.0899v1 [math-ph] 5 Jul 2009Email: koshkin@math.northwestern.edu Abstract We study geometric variational problems for a class of nonlinear σ-models](https://static.fdocument.org/doc/165x107/5e2b329fbaf0be3f3b4d87ad/sergiykoshkin-email-arxiv09070899v1-math-ph-5-jul-2009-email-koshkinmathnorthwesternedu.jpg)