Advanced behavior models Recent development of...
24
Advanced behavior models Recent development of discrete choice models Makoto Chikaraishi Hiroshima University October 13-15, 2017 The 16th Summer Course for Behavior Modeling in Transportation Networks @The University of Tokyo
Transcript of Advanced behavior models Recent development of...
Advanced behavior models
Recent development of discrete choice models
Makoto Chikaraishi
Hiroshima University
October 13-15, 2017The 16th Summer Course for Behavior Modeling in Transportation Networks@The University of Tokyo
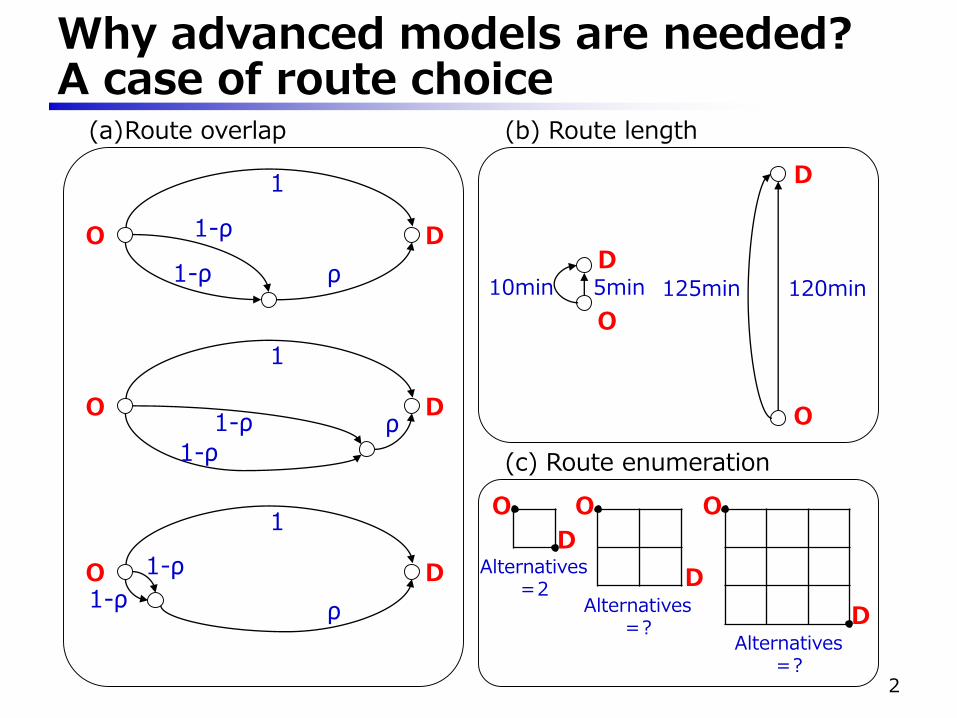
Why advanced models are needed?A case of route choice
O D
1
ρ1-ρ
1-ρ
O D
1
ρ1-ρ
1-ρ
O D
1
ρ
1-ρ
1-ρ
D
D
O
O
120min125min5min10min
(a)Route overlap (b) Route length
2
(c) Route enumeration
D
O
D
O
D
O
Alternatives=2
Alternatives=?
Alternatives=?
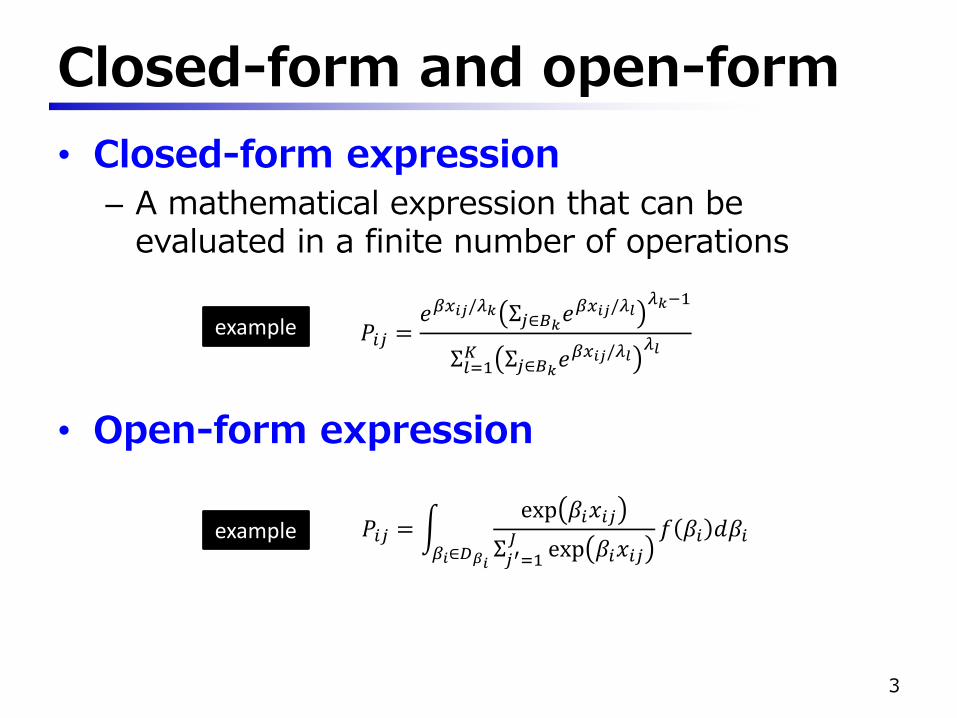
Closed-form and open-form
• Closed-form expression
– A mathematical expression that can be evaluated in a finite number of operations
• Open-form expression
3
𝑃𝑖𝑗 =𝑒𝛽𝑥𝑖𝑗/𝜆𝑘 Σ𝑗∈𝐵𝑘
𝑒𝛽𝑥𝑖𝑗/𝜆𝑙𝜆𝑘−1
Σ𝑙=1𝐾 Σ𝑗∈𝐵𝑘
𝑒𝛽𝑥𝑖𝑗/𝜆𝑙𝜆𝑙
example
𝑃𝑖𝑗 = 𝛽𝑖∈𝐷𝛽𝑖
exp 𝛽𝑖𝑥𝑖𝑗
Σ𝑗′=1𝐽 exp 𝛽𝑖𝑥𝑖𝑗
𝑓 𝛽𝑖 𝑑𝛽𝑖example
Pros and cons
• Closed-form expression– Pros
• Easy to use in practice
• Can be embedded into a larger modeling system as a subcomponent
– Cons• Not flexible enough in some cases
• Open-form expression– Pros
• Very flexible and any kind of closed-form models can be approximately modeled
– Cons• Behavioral understanding of the model is sometimes
difficult
4
Contents (closed-form models)
1. McFadden’s G function (McFadden, 1978)
Route overlap
2. Generalized G function (Mattsson et al., 2014)
Route overlap and route length
3. Recursive logit (Fosgerau et al., 2013)
Route enumeration
5
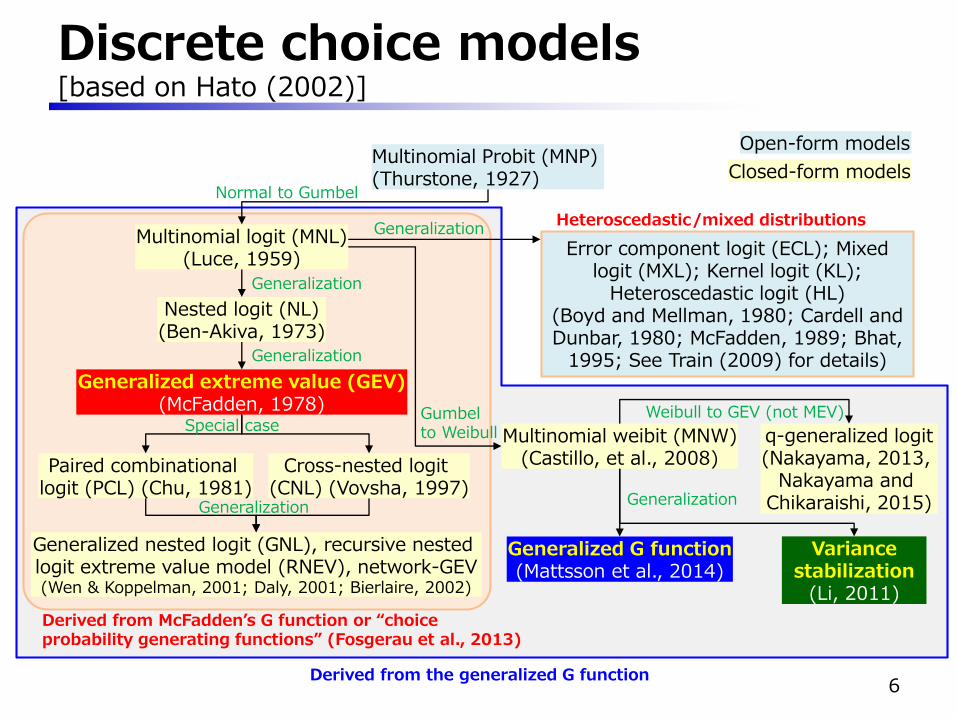
Discrete choice models[based on Hato (2002)]
6
Multinomial logit (MNL)(Luce, 1959)
Multinomial Probit (MNP)(Thurstone, 1927)
Nested logit (NL)(Ben-Akiva, 1973)
Generalized extreme value (GEV)(McFadden, 1978)
Paired combinational logit (PCL) (Chu, 1981)
Cross-nested logit (CNL) (Vovsha, 1997)
Generalized nested logit (GNL), recursive nested logit extreme value model (RNEV), network-GEV(Wen & Koppelman, 2001; Daly, 2001; Bierlaire, 2002)
Error component logit (ECL); Mixed logit (MXL); Kernel logit (KL);
Heteroscedastic logit (HL)(Boyd and Mellman, 1980; Cardell and Dunbar, 1980; McFadden, 1989; Bhat,
1995; See Train (2009) for details)
Normal to Gumbel
Generalization
Generalization
Generalization
Special case
Heteroscedastic/mixed distributions
Derived from McFadden’s G function or “choice probability generating functions” (Fosgerau et al., 2013)
Generalization
Multinomial weibit (MNW)(Castillo, et al., 2008)
Gumbel to Weibull q-generalized logit
(Nakayama, 2013, Nakayama and
Chikaraishi, 2015)
Variance stabilization
(Li, 2011)
Generalized G function(Mattsson et al., 2014)
Generalization
Derived from the generalized G function
Weibull to GEV (not MEV)
Closed-form models
Open-form models
McFadden’s G function
7
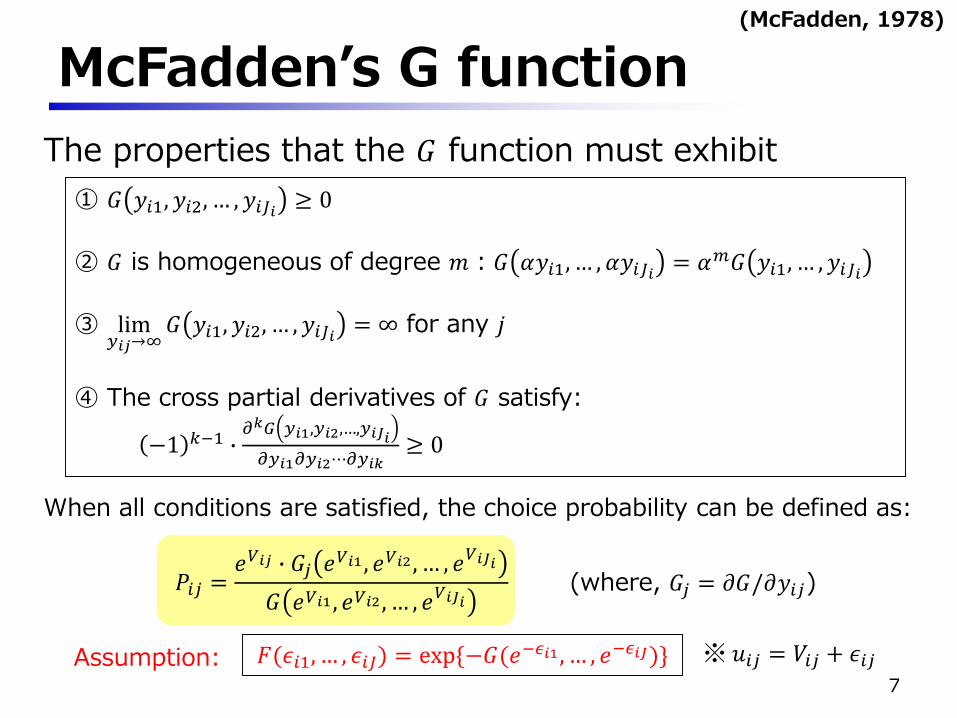
The properties that the 𝐺 function must exhibit
① 𝐺 𝑦𝑖1, 𝑦𝑖2, … , 𝑦𝑖𝐽𝑖 ≥ 0
② 𝐺 is homogeneous of degree 𝑚:𝐺 𝛼𝑦𝑖1, … , 𝛼𝑦𝑖𝐽𝑖 = 𝛼𝑚𝐺 𝑦𝑖1, … , 𝑦𝑖𝐽𝑖
③ lim𝑦𝑖𝑗→∞
𝐺 𝑦𝑖1, 𝑦𝑖2, … , 𝑦𝑖𝐽𝑖 = ∞ for any 𝑗
④ The cross partial derivatives of 𝐺 satisfy:
−1 𝑘−1 ∙𝜕𝑘𝐺 𝑦𝑖1,𝑦𝑖2,…,𝑦𝑖𝐽𝑖
𝜕𝑦𝑖1𝜕𝑦𝑖2⋯𝜕𝑦𝑖𝑘≥ 0
When all conditions are satisfied, the choice probability can be defined as:
𝑃𝑖𝑗 =𝑒𝑉𝑖𝑗 ∙ 𝐺𝑗 𝑒𝑉𝑖1 , 𝑒𝑉𝑖2 , … , 𝑒𝑉𝑖𝐽𝑖
𝐺 𝑒𝑉𝑖1 , 𝑒𝑉𝑖2 , … , 𝑒𝑉𝑖𝐽𝑖
𝐹(𝜖𝑖1, … , 𝜖𝑖𝐽) = exp{−𝐺(𝑒−𝜖𝑖1 , … , 𝑒−𝜖𝑖𝐽)}Assumption:
(where, 𝐺𝑗 = 𝜕𝐺/𝜕𝑦𝑖𝑗)
(McFadden, 1978)
※ 𝑢𝑖𝑗 = 𝑉𝑖𝑗 + 𝜖𝑖𝑗
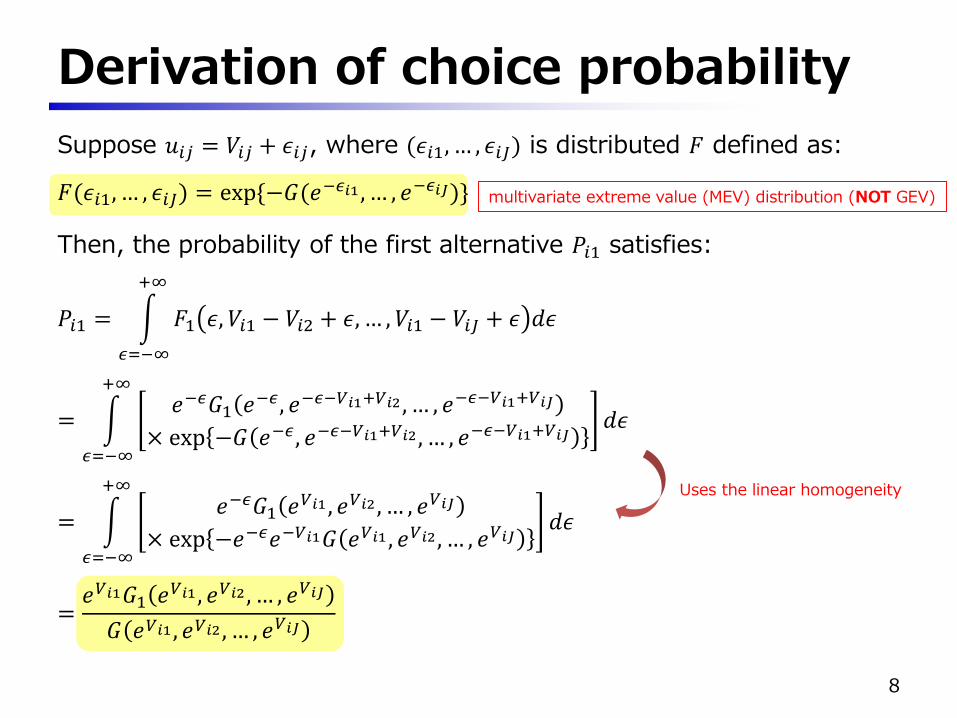
Derivation of choice probability
Suppose 𝑢𝑖𝑗 = 𝑉𝑖𝑗 + 𝜖𝑖𝑗, where (𝜖𝑖1, … , 𝜖𝑖𝐽) is distributed 𝐹 defined as:
𝐹(𝜖𝑖1, … , 𝜖𝑖𝐽) = exp{−𝐺(𝑒−𝜖𝑖1 , … , 𝑒−𝜖𝑖𝐽)}
Then, the probability of the first alternative 𝑃𝑖1 satisfies:
𝑃𝑖1 =
𝜖=−∞
+∞
𝐹1 𝜖, 𝑉𝑖1 − 𝑉𝑖2 + 𝜖,… , 𝑉𝑖1 − 𝑉𝑖𝐽 + 𝜖 𝑑𝜖
=
𝜖=−∞
+∞
𝑒−𝜖𝐺1 𝑒−𝜖, 𝑒−𝜖−𝑉𝑖1+𝑉𝑖2 , … , 𝑒−𝜖−𝑉𝑖1+𝑉𝑖𝐽
× exp −𝐺 𝑒−𝜖, 𝑒−𝜖−𝑉𝑖1+𝑉𝑖2 , … , 𝑒−𝜖−𝑉𝑖1+𝑉𝑖𝐽𝑑𝜖
=
𝜖=−∞
+∞
𝑒−𝜖𝐺1 𝑒𝑉𝑖1 , 𝑒𝑉𝑖2 , … , 𝑒𝑉𝑖𝐽
× exp −𝑒−𝜖𝑒−𝑉𝑖1𝐺 𝑒𝑉𝑖1 , 𝑒𝑉𝑖2 , … , 𝑒𝑉𝑖𝐽𝑑𝜖
=𝑒𝑉𝑖1𝐺1 𝑒𝑉𝑖1 , 𝑒𝑉𝑖2 , … , 𝑒𝑉𝑖𝐽
𝐺 𝑒𝑉𝑖1 , 𝑒𝑉𝑖2 , … , 𝑒𝑉𝑖𝐽
8
multivariate extreme value (MEV) distribution (NOT GEV)
Uses the linear homogeneity
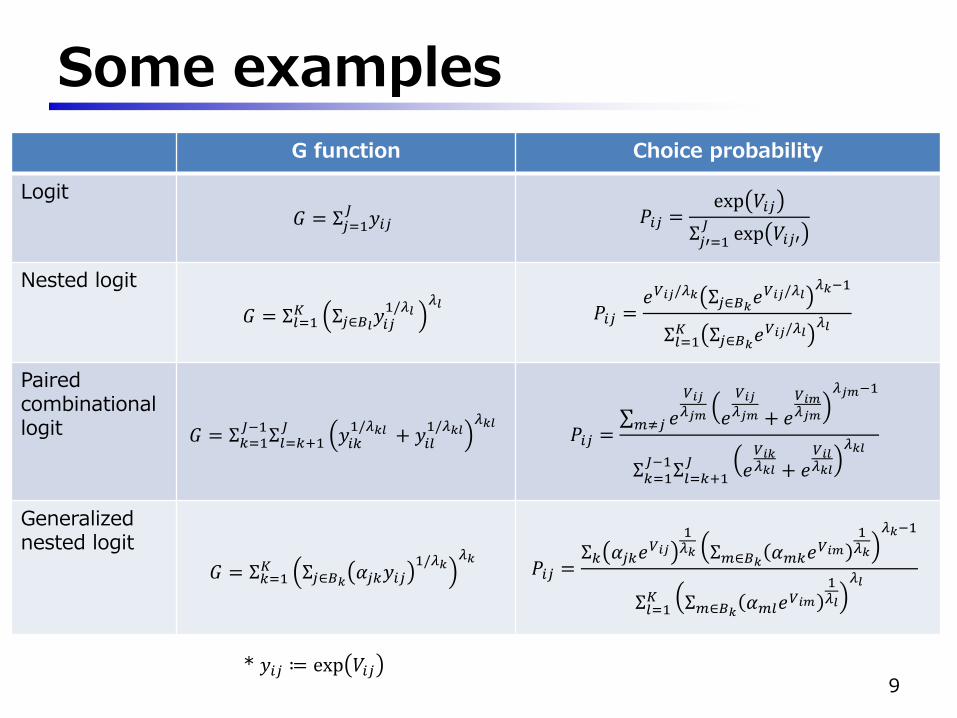
Some examples
G function Choice probability
Logit
𝐺 = Σ𝑗=1𝐽
𝑦𝑖𝑗 𝑃𝑖𝑗 =exp 𝑉𝑖𝑗
Σ𝑗′=1𝐽
exp 𝑉𝑖𝑗′
Nested logit
𝐺 = Σ𝑙=1𝐾 Σ𝑗∈𝐵𝑙
𝑦𝑖𝑗1/𝜆𝑙
𝜆𝑙𝑃𝑖𝑗 =
𝑒𝑉𝑖𝑗/𝜆𝑘 Σ𝑗∈𝐵𝑘𝑒𝑉𝑖𝑗/𝜆𝑙
𝜆𝑘−1
Σ𝑙=1𝐾 Σ𝑗∈𝐵𝑘
𝑒𝑉𝑖𝑗/𝜆𝑙𝜆𝑙
Pairedcombinational logit 𝐺 = Σ𝑘=1
𝐽−1Σ𝑙=𝑘+1𝐽
𝑦𝑖𝑘1/𝜆𝑘𝑙 + 𝑦𝑖𝑙
1/𝜆𝑘𝑙𝜆𝑘𝑙
𝑃𝑖𝑗 = 𝑚≠𝑗 𝑒
𝑉𝑖𝑗
𝜆𝑗𝑚 𝑒
𝑉𝑖𝑗
𝜆𝑗𝑚 + 𝑒𝑉𝑖𝑚𝜆𝑗𝑚
𝜆𝑗𝑚−1
Σ𝑘=1𝐽−1
Σ𝑙=𝑘+1𝐽
𝑒𝑉𝑖𝑘𝜆𝑘𝑙 + 𝑒
𝑉𝑖𝑙𝜆𝑘𝑙
𝜆𝑘𝑙
Generalized nested logit
𝐺 = Σ𝑘=1𝐾 Σ𝑗∈𝐵𝑘
𝛼𝑗𝑘𝑦𝑖𝑗1/𝜆𝑘
𝜆𝑘𝑃𝑖𝑗 =
Σ𝑘 𝛼𝑗𝑘𝑒𝑉𝑖𝑗
1𝜆𝑘 Σ𝑚∈𝐵𝑘
𝛼𝑚𝑘𝑒𝑉𝑖𝑚
1𝜆𝑘
𝜆𝑘−1
Σ𝑙=1𝐾 Σ𝑚∈𝐵𝑘
𝛼𝑚𝑙𝑒𝑉𝑖𝑚
1𝜆𝑙
𝜆𝑙
9* 𝑦𝑖𝑗 ≔ exp 𝑉𝑖𝑗
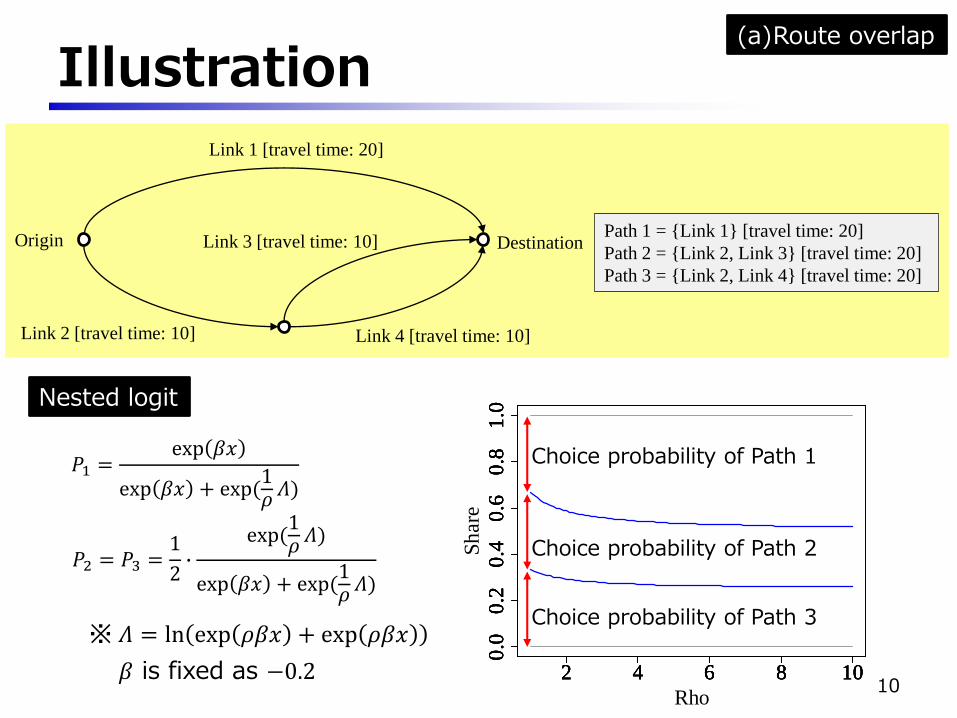
Illustration
10
Path 1 = {Link 1} [travel time: 20]
Path 2 = {Link 2, Link 3} [travel time: 20]
Path 3 = {Link 2, Link 4} [travel time: 20]
Origin Destination
Link 1 [travel time: 20]
Link 2 [travel time: 10] Link 4 [travel time: 10]
Link 3 [travel time: 10]
2 4 6 8 10
0.0
0.2
0.4
0.6
0.8
1.0
2 4 6 8 10
0.0
0.2
0.4
0.6
0.8
1.0
2 4 6 8 10
0.0
0.2
0.4
0.6
0.8
1.0
2 4 6 8 10
0.0
0.2
0.4
0.6
0.8
1.0
Rho
Sh
are
𝑃1 =exp 𝛽𝑥
exp 𝛽𝑥 + exp(1𝜌𝛬)
𝑃2 = 𝑃3 =1
2∙
exp(1𝜌𝛬)
exp 𝛽𝑥 + exp(1𝜌𝛬)
※ 𝛬 = ln exp 𝜌𝛽𝑥 + exp 𝜌𝛽𝑥
𝛽 is fixed as −0.2
Choice probability of Path 1
Choice probability of Path 3
Choice probability of Path 2
Nested logit
(a)Route overlap
Generalized G (A) function
11
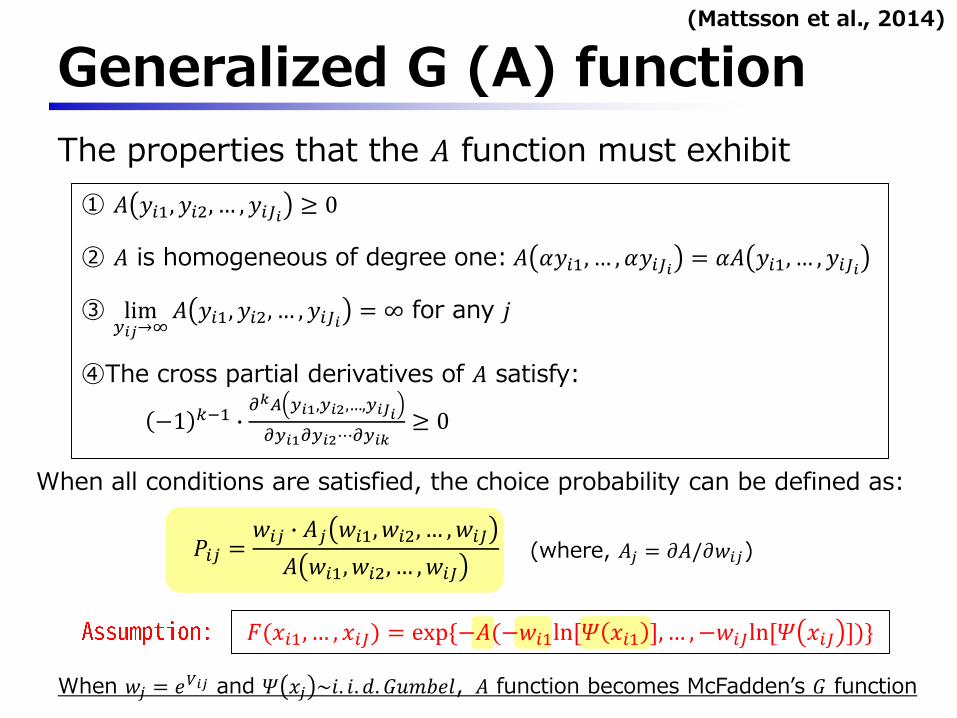
The properties that the 𝐴 function must exhibit
① 𝐴 𝑦𝑖1, 𝑦𝑖2, … , 𝑦𝑖𝐽𝑖 ≥ 0
② 𝐴 is homogeneous of degree one: 𝐴 𝛼𝑦𝑖1, … , 𝛼𝑦𝑖𝐽𝑖 = 𝛼𝐴 𝑦𝑖1, … , 𝑦𝑖𝐽𝑖
③ lim𝑦𝑖𝑗→∞
𝐴 𝑦𝑖1, 𝑦𝑖2, … , 𝑦𝑖𝐽𝑖 = ∞ for any 𝑗
④The cross partial derivatives of 𝐴 satisfy:
−1 𝑘−1 ∙𝜕𝑘𝐴 𝑦𝑖1,𝑦𝑖2,…,𝑦𝑖𝐽𝑖
𝜕𝑦𝑖1𝜕𝑦𝑖2⋯𝜕𝑦𝑖𝑘≥ 0
𝑃𝑖𝑗 =𝑤𝑖𝑗 ∙ 𝐴𝑗 𝑤𝑖1, 𝑤𝑖2, … , 𝑤𝑖𝐽
𝐴 𝑤𝑖1, 𝑤𝑖2, … , 𝑤𝑖𝐽
𝐹(𝑥𝑖1, … , 𝑥𝑖𝐽) = exp{−𝐴(−𝑤𝑖1ln[𝛹 𝑥𝑖1 ], … , −𝑤𝑖𝐽ln[𝛹 𝑥𝑖𝐽 ])}
When 𝑤𝑗 = 𝑒𝑉𝑖𝑗 and 𝛹 𝑥𝑗 ~𝑖. 𝑖. 𝑑. 𝐺𝑢𝑚𝑏𝑒𝑙, 𝐴 function becomes McFadden’s 𝐺 function
(Mattsson et al., 2014)
When all conditions are satisfied, the choice probability can be defined as:
(where, 𝐴𝑗 = 𝜕𝐴/𝜕𝑤𝑖𝑗)
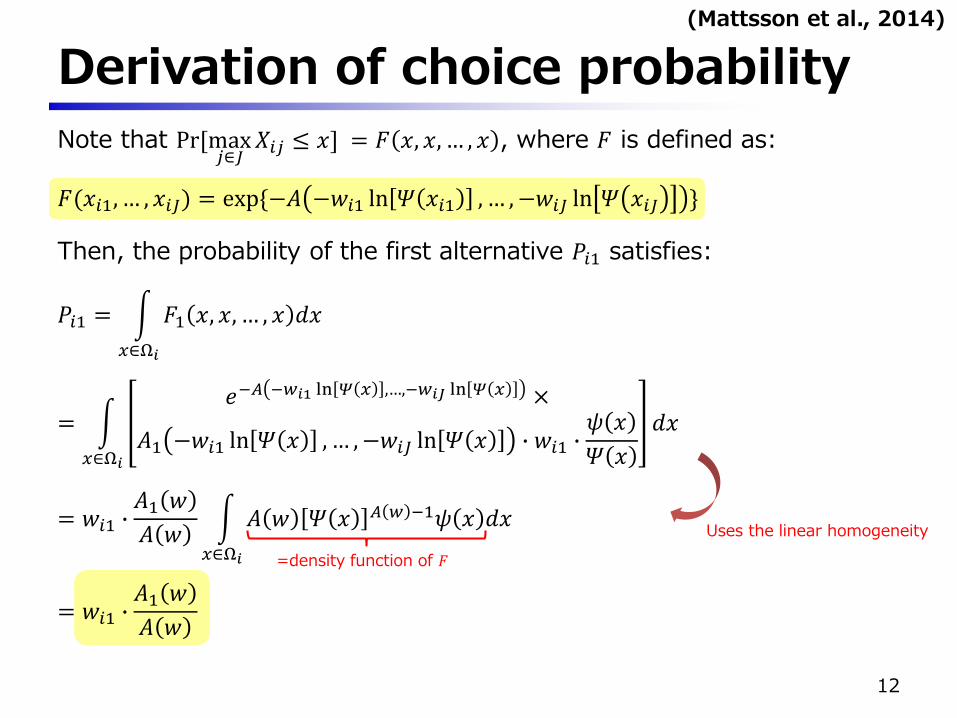
Derivation of choice probability
Note that Pr[max𝑗∈𝐽
𝑋𝑖𝑗 ≤ 𝑥] = 𝐹 𝑥, 𝑥, … , 𝑥 , where 𝐹 is defined as:
𝐹(𝑥𝑖1, … , 𝑥𝑖𝐽) = exp{−𝐴 −𝑤𝑖1 ln 𝛹 𝑥𝑖1 , … , −𝑤𝑖𝐽 ln 𝛹 𝑥𝑖𝐽 }
Then, the probability of the first alternative 𝑃𝑖1 satisfies:
𝑃𝑖1 =
𝑥∈Ω𝑖
𝐹1 𝑥, 𝑥, … , 𝑥 𝑑𝑥
=
𝑥∈Ω𝑖
𝑒−𝐴 −𝑤𝑖1 ln 𝛹 𝑥 ,…,−𝑤𝑖𝐽 ln 𝛹 𝑥 ×
𝐴1 −𝑤𝑖1 ln 𝛹 𝑥 ,… ,−𝑤𝑖𝐽 ln 𝛹 𝑥 ∙ 𝑤𝑖1 ∙𝜓 𝑥
𝛹 𝑥
𝑑𝑥
= 𝑤𝑖1 ∙𝐴1 𝑤
𝐴 𝑤
𝑥∈Ω𝑖
𝐴 𝑤 𝛹 𝑥 𝐴 𝑤 −1𝜓 𝑥 𝑑𝑥
= 𝑤𝑖1 ∙𝐴1 𝑤
𝐴 𝑤
12
Uses the linear homogeneity
=density function of 𝐹
(Mattsson et al., 2014)
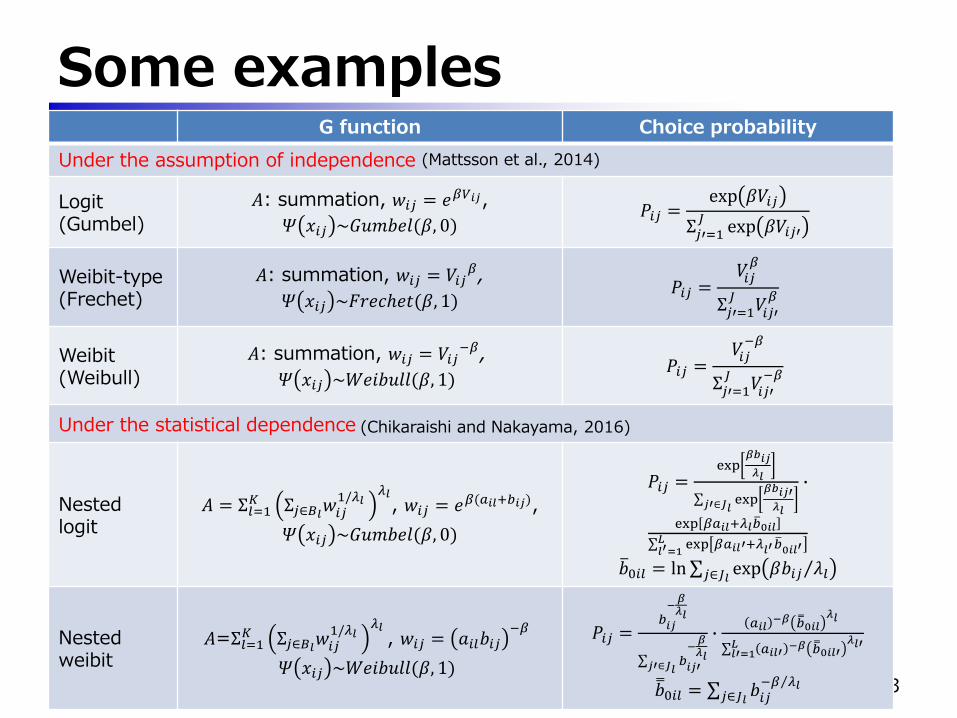
Some examples
13
G function Choice probability
Under the assumption of independence
Logit(Gumbel)
𝐴: summation, 𝑤𝑖𝑗 = 𝑒𝛽𝑉𝑖𝑗,
𝛹 𝑥𝑖𝑗 ~𝐺𝑢𝑚𝑏𝑒𝑙(𝛽, 0)𝑃𝑖𝑗 =
exp 𝛽𝑉𝑖𝑗
Σ𝑗′=1𝐽
exp 𝛽𝑉𝑖𝑗′
Weibit-type(Frechet)
𝐴: summation, 𝑤𝑖𝑗 = 𝑉𝑖𝑗𝛽,
𝛹 𝑥𝑖𝑗 ~𝐹𝑟𝑒𝑐ℎ𝑒𝑡(𝛽, 1)𝑃𝑖𝑗 =
𝑉𝑖𝑗𝛽
Σ𝑗′=1𝐽
𝑉𝑖𝑗′𝛽
Weibit(Weibull)
𝐴: summation, 𝑤𝑖𝑗 = 𝑉𝑖𝑗−𝛽,
𝛹 𝑥𝑖𝑗 ~𝑊𝑒𝑖𝑏𝑢𝑙𝑙(𝛽, 1)𝑃𝑖𝑗 =
𝑉𝑖𝑗−𝛽
Σ𝑗′=1𝐽
𝑉𝑖𝑗′−𝛽
Under the statistical dependence
Nestedlogit
𝐴 = Σ𝑙=1𝐾 Σ𝑗∈𝐵𝑙
𝑤𝑖𝑗1/𝜆𝑙
𝜆𝑙, 𝑤𝑖𝑗 = 𝑒𝛽(𝑎𝑖𝑙+𝑏𝑖𝑗),
𝛹 𝑥𝑖𝑗 ~𝐺𝑢𝑚𝑏𝑒𝑙(𝛽, 0)
𝑃𝑖𝑗 =exp
𝛽𝑏𝑖𝑗
𝜆𝑙
𝑗′∈𝐽𝑙exp
𝛽𝑏𝑖𝑗′
𝜆𝑙
∙
exp 𝛽𝑎𝑖𝑙+𝜆𝑙 𝑏0𝑖𝑙
𝑙′=1𝐿 exp 𝛽𝑎𝑖𝑙′+𝜆𝑙′
𝑏0𝑖𝑙′
𝑏0𝑖𝑙 = ln 𝑗∈𝐽𝑙exp 𝛽𝑏𝑖𝑗 𝜆𝑙
Nested weibit
𝐴=Σ𝑙=1𝐾 Σ𝑗∈𝐵𝑙
𝑤𝑖𝑗1/𝜆𝑙
𝜆𝑙, 𝑤𝑖𝑗 = 𝑎𝑖𝑙𝑏𝑖𝑗
−𝛽
𝛹 𝑥𝑖𝑗 ~𝑊𝑒𝑖𝑏𝑢𝑙𝑙(𝛽, 1)
𝑃𝑖𝑗 =𝑏𝑖𝑗
−𝛽𝜆𝑙
𝑗′∈𝐽𝑙𝑏𝑖𝑗′
−𝛽𝜆𝑙
∙𝑎𝑖𝑙
−𝛽 𝑏0𝑖𝑙𝜆𝑙
𝑙′=1𝐿 𝑎𝑖𝑙′
−𝛽 𝑏0𝑖𝑙′𝜆𝑙′
𝑏0𝑖𝑙 = 𝑗∈𝐽𝑙𝑏𝑖𝑗− 𝛽 𝜆𝑙
(Mattsson et al., 2014)
(Chikaraishi and Nakayama, 2016)
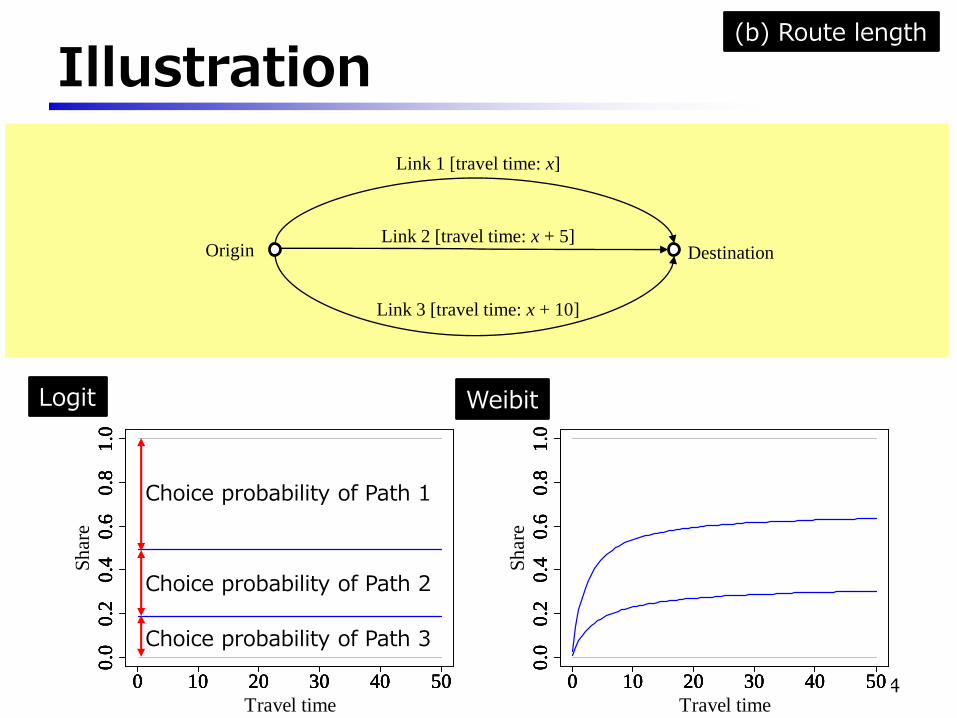
Illustration
14
Origin Destination
Link 1 [travel time: x]
Link 2 [travel time: x + 5]
Link 3 [travel time: x + 10]
Logit Weibit
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
Travel time
Sh
are
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
Travel time
Sh
are
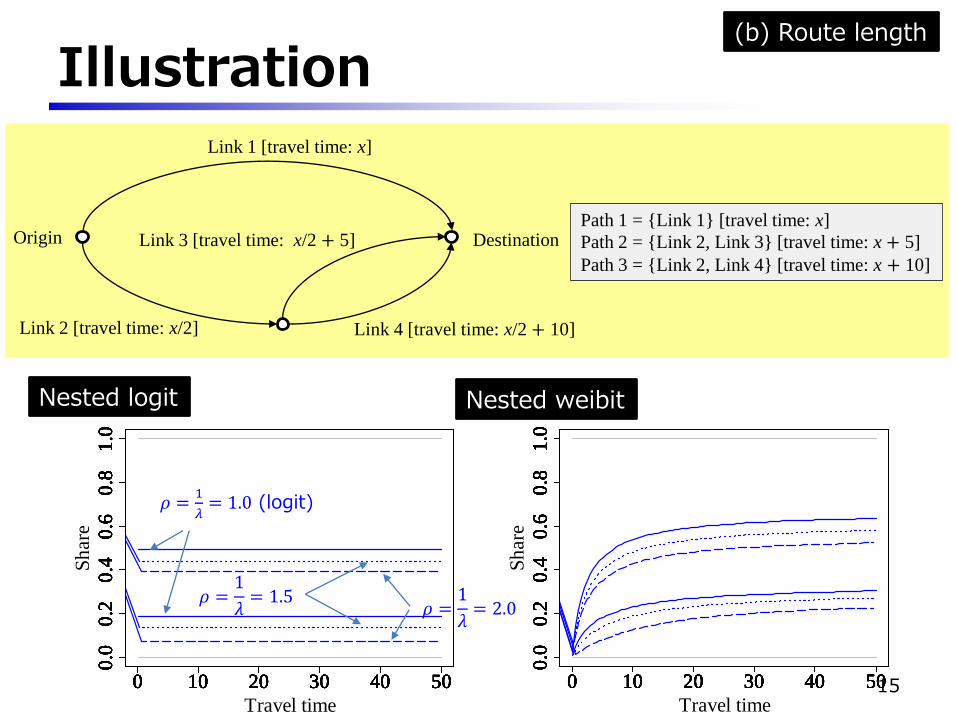
Choice probability of Path 1
Choice probability of Path 3
Choice probability of Path 2
(b) Route length
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
Travel time
Sh
are
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
0 10 20 30 40 50
0.0
0.2
0.4
0.6
0.8
1.0
Travel time
Sh
are
Illustration
15
Nested logit Nested weibit
Origin Destination
Link 1 [travel time: x]
Link 2 [travel time: x/2] Link 4 [travel time: x/2 + 10]
Link 3 [travel time: x/2 + 5]Path 1 = {Link 1} [travel time: x]
Path 2 = {Link 2, Link 3} [travel time: x + 5]
Path 3 = {Link 2, Link 4} [travel time: x + 10]
𝜌 =1
𝜆= 1.0 (logit)
𝜌 =1
𝜆= 1.5
𝜌 =1
𝜆= 2.0
(b) Route length
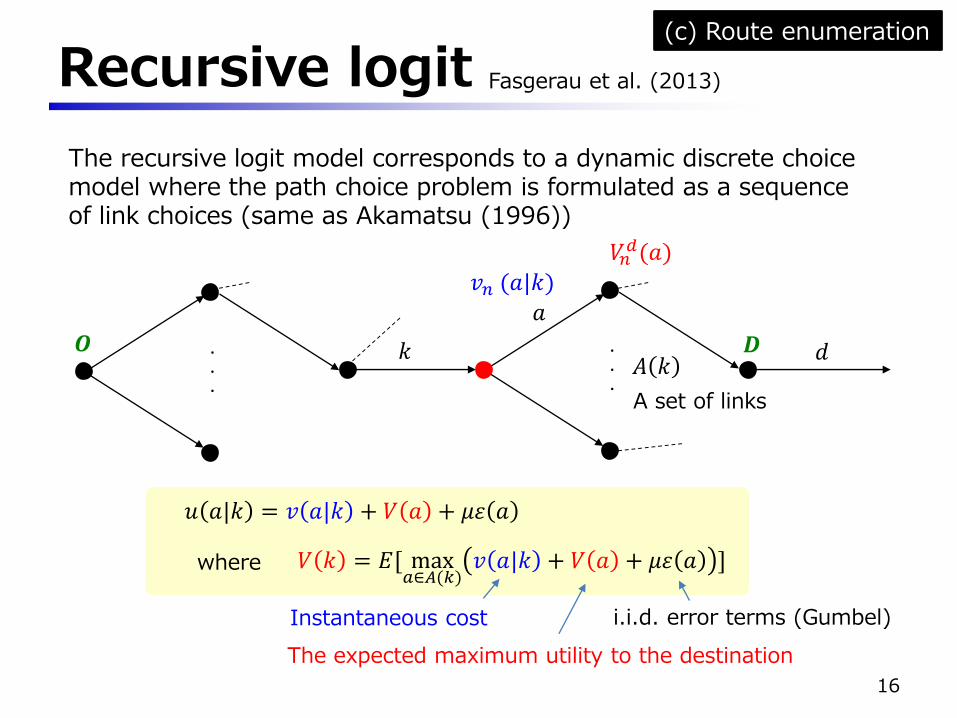
Recursive logit
16
The recursive logit model corresponds to a dynamic discrete choice model where the path choice problem is formulated as a sequence of link choices (same as Akamatsu (1996))
Fasgerau et al. (2013)
𝑢 𝑎|𝑘 = 𝑣 𝑎|𝑘 + 𝑉 𝑎 + 𝜇𝜀 𝑎
𝑉 𝑘 = 𝐸[ max𝑎∈𝐴(𝑘)
𝑣 𝑎|𝑘 + 𝑉 𝑎 + 𝜇𝜀 𝑎 ]where
𝑉𝑛𝑑(𝑎)
𝑑𝑘
𝑎
𝑫𝑶 ...
.
.
.𝐴 𝑘
A set of links
𝑣𝑛 (𝑎|𝑘)
Instantaneous cost
The expected maximum utility to the destination
i.i.d. error terms (Gumbel)
(c) Route enumeration
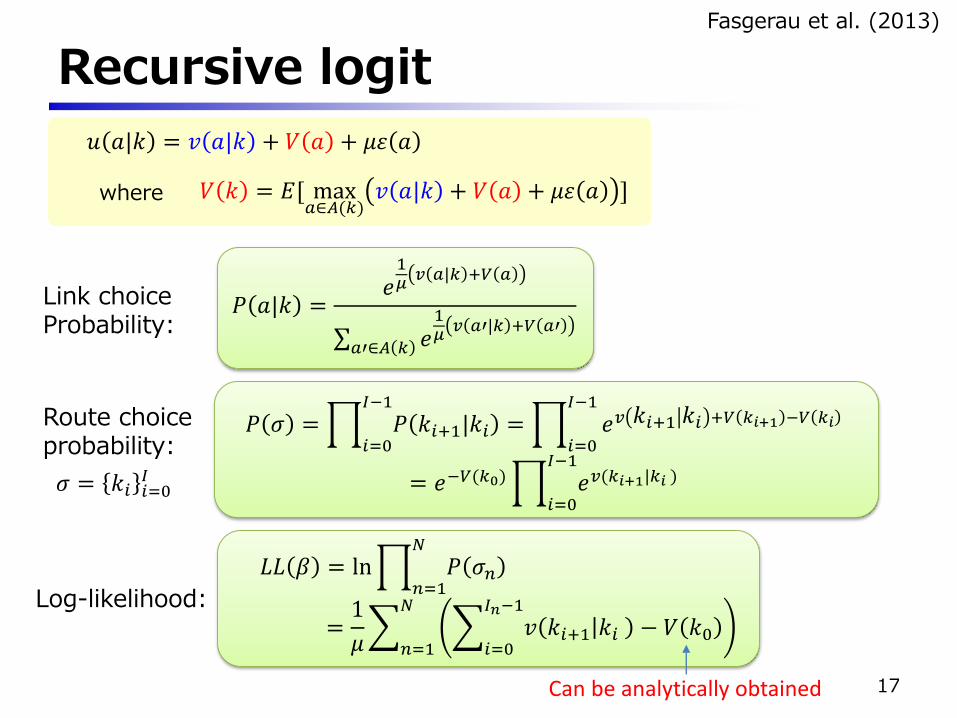
Recursive logit
17
𝑃 𝑎|𝑘 =𝑒1𝜇 𝑣 𝑎|𝑘 +𝑉 𝑎
𝑎′∈𝐴 𝑘 𝑒1𝜇 𝑣 𝑎′|𝑘 +𝑉 𝑎′
𝑃 𝜎 = 𝑖=0
𝐼−1
𝑃 𝑘𝑖+1|𝑘𝑖 = 𝑖=0
𝐼−1
𝑒𝑣 𝑘𝑖+1 𝑘𝑖 +𝑉 𝑘𝑖+1 −𝑉 𝑘𝑖
= 𝑒−𝑉(𝑘0) 𝑖=0
𝐼−1
𝑒𝑣(𝑘𝑖+1|𝑘𝑖 )
Link choiceProbability:
Route choice probability:
𝜎 = 𝑘𝑖 𝑖=0𝐼
Fasgerau et al. (2013)
𝑢 𝑎|𝑘 = 𝑣 𝑎|𝑘 + 𝑉 𝑎 + 𝜇𝜀 𝑎
𝑉 𝑘 = 𝐸[ max𝑎∈𝐴(𝑘)
𝑣 𝑎|𝑘 + 𝑉 𝑎 + 𝜇𝜀 𝑎 ]where
𝐿𝐿 𝛽 = ln 𝑛=1
𝑁
𝑃 𝜎𝑛
=1
𝜇
𝑛=1
𝑁
𝑖=0
𝐼𝑛−1
𝑣 𝑘𝑖+1 𝑘𝑖 − 𝑉 𝑘0
Log-likelihood:
Can be analytically obtained
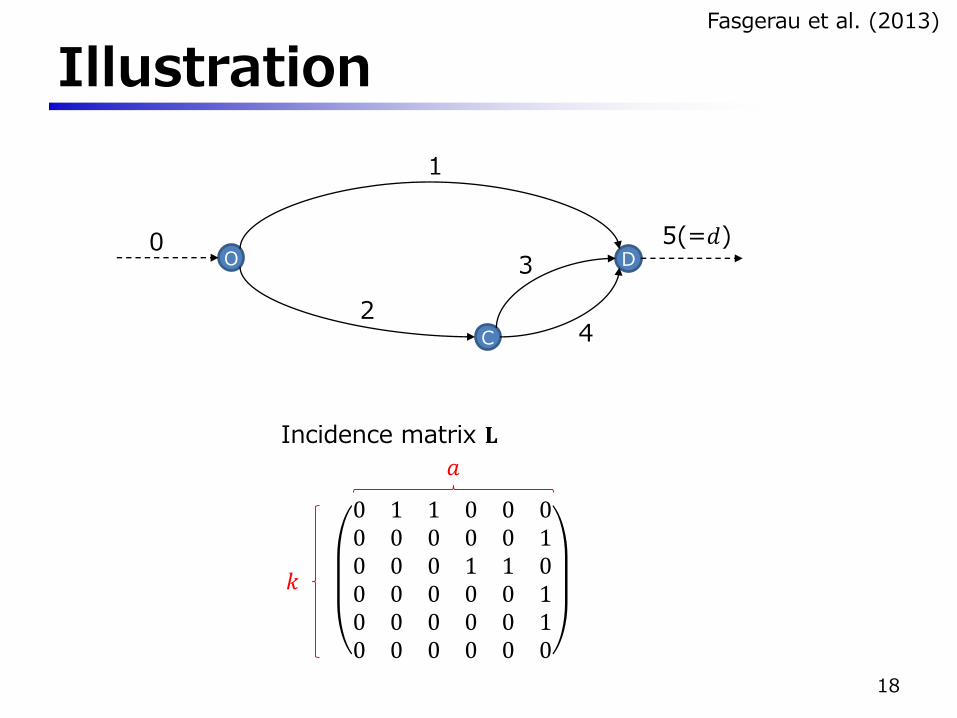
Illustration
18
O D
C
5(=𝑑)
1
2
3
4
Incidence matrix 𝐋
0 1 1 0 0 00 0 0 0 0 10 0 0 1 1 00 0 0 0 0 10 0 0 0 0 10 0 0 0 0 0
0
𝑘
𝑎
Fasgerau et al. (2013)
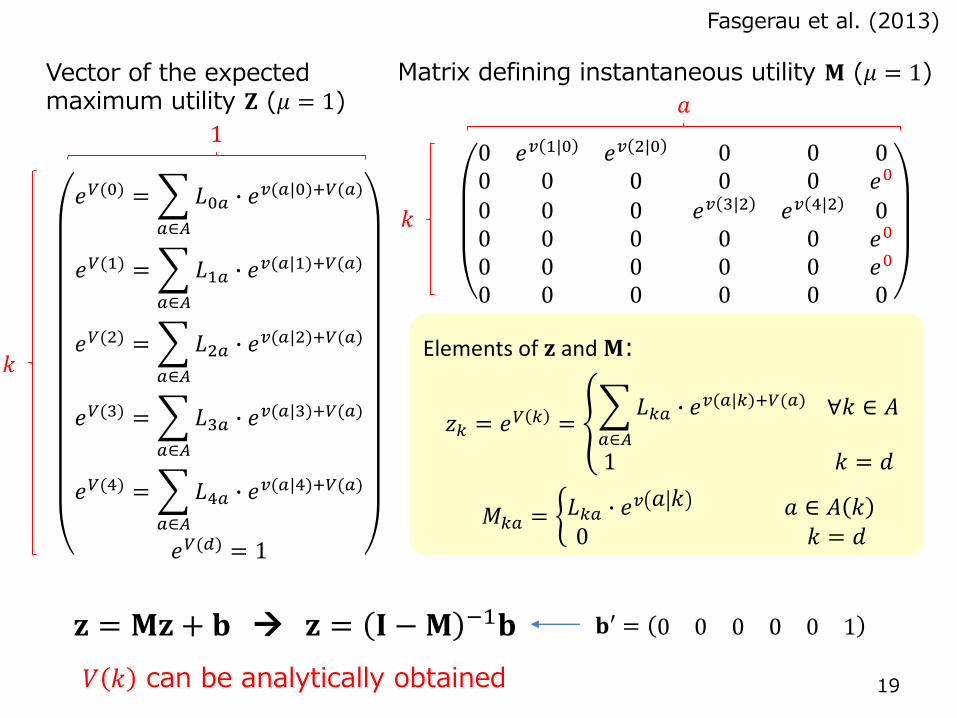
19
Vector of the expectedmaximum utility 𝐙 (𝜇 = 1)
𝑒𝑉(0) =
𝑎∈𝐴
𝐿0𝑎 ∙ 𝑒𝑣(𝑎|0)+𝑉(𝑎)
𝑒𝑉(1) =
𝑎∈𝐴
𝐿1𝑎 ∙ 𝑒𝑣(𝑎|1)+𝑉(𝑎)
𝑒𝑉(2) =
𝑎∈𝐴
𝐿2𝑎 ∙ 𝑒𝑣(𝑎|2)+𝑉(𝑎)
𝑒𝑉(3) =
𝑎∈𝐴
𝐿3𝑎 ∙ 𝑒𝑣(𝑎|3)+𝑉(𝑎)
𝑒𝑉(4) =
𝑎∈𝐴
𝐿4𝑎 ∙ 𝑒𝑣(𝑎|4)+𝑉(𝑎)
𝑒𝑉(𝑑) = 1
𝑘
1
Matrix defining instantaneous utility 𝐌 (𝜇 = 1)
0 𝑒𝑣 1|0 𝑒𝑣 2|0 0 0 00 0 0 0 0 𝑒0
0 0 0 𝑒𝑣 3|2 𝑒𝑣 4|2 00 0 0 0 0 𝑒0
0 0 0 0 0 𝑒0
0 0 0 0 0 0
𝑘
𝑎
Elements of 𝐳 and 𝐌:
𝑧𝑘 = 𝑒𝑉 𝑘 =
𝑎∈𝐴
𝐿𝑘𝑎 ∙ 𝑒𝑣(𝑎|𝑘)+𝑉(𝑎) ∀𝑘 ∈ 𝐴
1 𝑘 = 𝑑
𝑀𝑘𝑎 = 𝐿𝑘𝑎 ∙ 𝑒𝑣 𝑎 𝑘 𝑎 ∈ 𝐴 𝑘0 𝑘 = 𝑑
Fasgerau et al. (2013)
𝐳 = 𝐌𝐳 + 𝐛 𝐳 = 𝐈 −𝐌 −1𝐛 𝐛′ = 0 0 0 0 0 1
𝑉 𝑘 can be analytically obtained
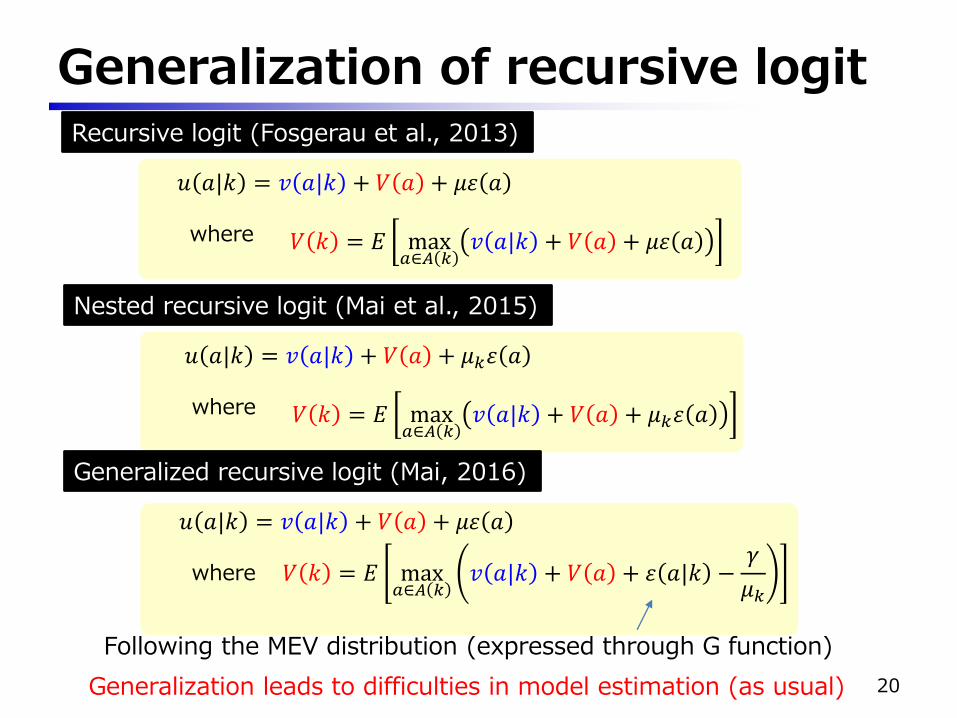
Generalization of recursive logit
20
𝑢 𝑎|𝑘 = 𝑣 𝑎|𝑘 + 𝑉 𝑎 + 𝜇𝜀 𝑎
𝑉 𝑘 = 𝐸 max𝑎∈𝐴 𝑘
𝑣 𝑎|𝑘 + 𝑉 𝑎 + 𝜇𝜀 𝑎where
Recursive logit (Fosgerau et al., 2013)
𝑢 𝑎|𝑘 = 𝑣 𝑎|𝑘 + 𝑉 𝑎 + 𝜇𝑘𝜀 𝑎
𝑉 𝑘 = 𝐸 max𝑎∈𝐴 𝑘
𝑣 𝑎|𝑘 + 𝑉 𝑎 + 𝜇𝑘𝜀 𝑎where
Nested recursive logit (Mai et al., 2015)
𝑢 𝑎|𝑘 = 𝑣 𝑎|𝑘 + 𝑉 𝑎 + 𝜇𝜀 𝑎
𝑉 𝑘 = 𝐸 max𝑎∈𝐴 𝑘
𝑣 𝑎|𝑘 + 𝑉 𝑎 + 𝜀 𝑎|𝑘 −𝛾
𝜇𝑘where
Generalized recursive logit (Mai, 2016)
Following the MEV distribution (expressed through G function)
Generalization leads to difficulties in model estimation (as usual)
Highly recommended!• Kenneth E. Train• Discrete Choice Methods with Simulation• Cambridge University Press• Second edition, 2009
• https://eml.berkeley.edu/books/choice2.htmlChapter 1. IntroductionChapter 2. Properties of Discrete Choice ModelsChapter 3. LogitChapter 4. GEVChapter 5. ProbitChapter 6. Mixed LogitChapter 7. Variations on a ThemeChapter 8. Numerical MaximizationChapter 9. Drawing from DensitiesChapter 10. Simulation-Assisted EstimationChapter 11. Individual-Level ParametersChapter 12. Bayesian ProceduresChapter 13. EndogeneityChapter 14. EM Algorithms
21
References• Ben-Akiva, M. (1973) Structure of passenger travel demand models. Ph.D. Thesis,
Massachusetts Institute of Technology. Dept. of Civil and Environmental Engineering (http://hdl.handle.net/1721.1/14790 ).
• Bhat, C.R. (1995) A heteroscedastic extreme value model of intercity travel mode choice. Transportation Research Part B 29, 471-483.
• Bierlaire, M. (2002) The Network GEV model. Proceedings of the 2nd Swiss Transportation Research Conference, Ascona, Switzerland.
• Cardell, N.S., Dunbar, F.C. (1980) Measuring the societal impacts of automobile downsizing. Transportation Research Part A: General 14, 423-434.
• Castillo, E., Menendez, J.M., Jimenez, P., Rivas, A. (2008) Closed form expressions for choice probabilities in the Weibull case. Transportation Research Part B 42, 373-380.
• Chikaraishi, M., Nakayama, S. (2016) Discrete choice models with q-product random utilities, Transportation Research Part B (forthcoming).
• Daly, A. (2001) Recursive nested EV model. ITS Working Paper 559, Institute for Transport Studies, University of Leeds.
• Daly, A., Bierlaire, M. (2006) A general and operational representation of Generalised Extreme Value models. Transportation Research Part B: Methodological 40, 285-305.
22
References• Fosgerau, M., McFadden, D., Bierlaire, M. (2013) Choice probability generating
functions. Journal of Choice Modelling 8, 1-18.
• Fosgerau, M., Frejinger, E., Karlstrom, A., 2013. A link based network route choice model with unrestricted choice set. Transportation Research Part B: Methodological 56, 70-80.
• Hato, E. (2002) Behaviors in network, Infrastructure Planning Review, 19-1, 13-27 (in Japanese).
• Koppelman, F.S., Wen, C.-H. (2000) The paired combinatorial logit model: properties, estimation and application. Transportation Research Part B: Methodological 34, 75-89.
• Li, B. (2011) The multinomial logit model revisited: A semi-parametric approach in discrete choice analysis. Transportation Research Part B 45, 461-473.
• Luce, R. (1959) Individual Choice Beahviour. John Wiley, New York.
• Mai, T., Fosgerau, M., Frejinger, E., 2015. A nested recursive logit model for route choice analysis. Transportation Research Part B: Methodological 75, 100-112.
• Mai, T., 2016. A method of integrating correlation structures for a generalized recursive route choice model. Transportation Research Part B: Methodological 93, Part A, 146-161.
• Mattsson, L.-G., Weibull, J.W., Lindberg, P.O. (2014) Extreme values, invariance and choice probabilities. Transportation Research Part B: Methodological 59, 81-95.
23
References• McFadden, D., (1978) Modelling the choice of residential location, in: Karlqvist, A.,
Lundqvist, L., Snickars, F., Weibull, J. (Eds.), Spatial Interaction Theory and Residential Location. North-Holland, Amsterdam.
• McFadden, D. (1989) A Method of Simulated Moments for Estimation of Discrete Response Models Without Numerical Integration. Econometrica 57, 995-1026.
• Nakayama, S. (2013) q-generalized logit route choice and network equilibrium model. Proceedings of the 20th International Symposium on Transportation and Traffic Theory (Poster Session).
• Nakayama, S., Chikaraishi, M., 2015. Unified closed-form expression of logit and weibit and its extension to a transportation network equilibrium assignment. Transportation Research Part B 81, 672-685.
• Thurstone, L.L. (1927) A law of comparative judgment. Psychological Review 34, 273-286.
• Train, K. (2009) Discrete Choice Methods with Simulation, 2nd Edition ed. Cambridge University Press.
• Vovsha, P. (1997) Cross-nested logit model: an application to mode choice in the Tel-Aviv metropolitan area. Transportation Research Board, Presented at the 76th Annual Meeting, Washington DC.
• Wen, C.-H., Koppelman, F.S. (2001) The generalized nested logit model. Transportation Research Part B 35, 627-641.
24