New Techniques and Improved Methods for Fault Location
29
Copyright © SEL 2011 New Techniques and Improved Methods for Fault Location
Transcript of New Techniques and Improved Methods for Fault Location

Copyright © SEL 2011
New Techniques and Improved
Methods for Fault Location

Fault Location (FL) Methods
• Impedance-based methods
♦ Single-ended method
♦ Multi-ended method
Real-time calculations in relays
Offline software tools
• Traveling wave (TW) method

Impedance-Based FL What Is Impedance-Based Fault Location?
Impedance (Z)
Impedance Distance
Distance = Im(VL • IFLT
*)
Im(IL • ZL • IFLT*)
• Line Length
ZLINEZS
ES

ZSES
LO
AD
ZLINE
Single-Ended Method Uses Only Local Current and Voltage
VLINE
ILINE
IFAULT
ILINE = IFAULT
Radial System Single-Ended Method
RFAULT

Single-Ended Method
jX
R
RFAULT = 0
ZLINE
RFAULT
Line Impedance

ZSES
ZLINE ZR
ER
RFAULT
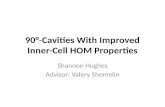
Single-Ended Method Multisource System
IS_TERM
VLINE
IR_TERM
IFAULT
IFAULT IS_TERM
RFAULT = 0
No Problem
RFAULT 0
IFAULT = IS_TERM No Problem
IFAULT IS_TERM Problem!

Single-Ended Method
jX
R
RFAULT = 0
ZLINE
RFAULT
Line Impedance
IFAULT = IS_TERM
IFAULT IS_TERM RFAULT
RFAULT

Multi-Ended Fault Location Requires Communications
• Real time
Between devices (relays)
Natural for line differential
• Offline
Between devices and data concentrator
(central unit)

Multi-Ended Fault Location
Real Time
IS_TERM
IR_TERM
Distance =
Im{VL • (IR_TERM + IS_TERM) *}
Im{IL • ZL • (IR_TERM + IS_TERM) *} • Line Length
ZLINE_1
S R

Impact of Polarizing Quantities

LL1
LL2
LL4
LL3Tap Point 1
Tap Point 2
LLTZL1
Four-Terminal FL Between Taps
m > 1.0
Fault not in my section
No relay claims
fault in own section!
Line Diff (1)
Line Diff (2)
Line Diff (3)
Line Diff (4)

ZL1
Four-Terminal FL Between Taps
0 < m_t < 1.0
Fault in middle section
I1
I4
I2
I3
IL = I1 + I4
IR = I2 + I3
VTAP = V1 – (I1 + k0 • IG_1) • ZL1
IL IR

Multi-Ended Fault Location Offline
ZLINE_1
S R

Use Negative Sequence
N2
S R
m • ZLINE_2 (1 – m) • ZLINE_2
ZS_2 ZR_2 VS_2
IS_2
VR_2
IR_2
VF_2
Terminal S:
Terminal R:
F2

Solve for m
m = VR_2 – VS_2 + ZLINE_2 • IR_2
ZLINE_2 • (IR_2 + IR_2)

Traveling Wave
• Can locate faults within 300 m
( 0.2 miles)
• Works great for series-compensated
and parallel lines
• Keeps high resolution regardless of
line length

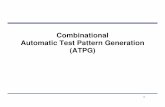
Transients Contain FL Information
0.2 0.22 0.24 0.26 0.28 0.3 0.32 0.34 0.36 0.38 0.4
-6000
-4000
-2000
0
2000
4000
6000
0.298 0.299 0.3 0.301 0.302 0.303 0.304 0.305-3000
-2000
-1000
0
1000
2000
3000
0.298 0.299 0.3 0.301 0.302 0.303 0.304 0.305-100
-50
0
50
100
150
10 kHz – 0.6 MHz
DC to 0.6 MHz
High-frequency
transients contain
precise information
about location
of the fault

Basic Physics Revisited
Time (seconds)
Velo
city (
Me
ters
/ s
econds)
Distance =
Velocity • Time
s = u • t

Theory of Traveling Wave

FLOCATION = LLENGTH
2 +
(tS_TERM – tR_TERM)
τLINE
LLENGTH
2 •
Calculating the Fault Distance
Find the phase velocity (νp) of the TW
νp =
1
0 0 r r 1
Calculate the travel time of the wave in the line
τLine = Line Length
νp
Calculate the distance to the fault

S R
Example – What Is the
Distance to the Fault?
Line = 300 km (186 mi)
10:00.000,000,000
10:00.000,334,560 10:00.000,665,440
νp = 300,000 km / s
τLINE = 0.001 s or 1 ms

Distance From Terminal S
= 100.368 km
• 150 = 150 + (334,560 – 665,440)
1,000,000
FLOCATION = LLENGTH
2 +
(tS_TERM – tR_TERM)
τLINE
LLENGTH
2 •

Realizing the TW
• Six current channels
• Sampling at 1.5625 MHz each
• 12-bit A/D converter

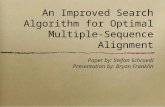
CT Bandwidth Is Adequate
to Detect Traveling Waves
Frequency (Hz)
1/R
CF
10
0.95
0.710000010000100 1000 1000000
0.75
0.8
0.85
0.9
1
1.05
Zp
Zs Cs
Zs
Zs
N:5Exciting
ImpedanceStray
CapacitanceBurden
Ideal
Transformer
Primary
WindingSecondary
Winding
Equivalent Circuit for Determining
CT Frequency Response

Frequency Response of CVT

I0TW 1 1 1 IATW1
I TW 2 1 1 IBTW3
I TW ICTW0 3 3
Clarke Modal Transformations of TW
Extract the aerial mode:
I TW = 1/3 • (2 • IATW – IBTW – ICTW)

TW Fault Locator Is Easy to Configure Enable TW Fault Location (ETWFL)

Determine Line Propagation
Velocity (LPVEL)
= 1
LC
For a 500 kV line:
L1 = 8.852 • 10–7 H / m
C1 = 1.302 • 10–11 F / m
νp1 = 2.946 • 108 m / s
= 0.982 c
νp = 1
0 0 r

Questions?