me.emu.edu.trme.emu.edu.tr/amir/ME331/Lab4 Experiment sheet.doc · Web viewωn : Natural frequency...
10
E astern Mediterranean University epartment of Mechanical Engineering Laboratory Handout COURSE : Dynamics of Machinery MENG 331 Semester: Spring (2012-2013) Name of Experiment: Damped Free Vibrations Instructor: Assist. Prof. Dr. Mostafa Ranjbar Submitted by: Student No: Group No: Date of experiment: Date of submission: ------------------------------------------------------------ ------------------------------------------------ EVALUATION Activity During Experiment & Procedure 30 % Data , Results & Graphs
-
Upload
truongxuyen -
Category
Documents
-
view
218 -
download
3
Transcript of me.emu.edu.trme.emu.edu.tr/amir/ME331/Lab4 Experiment sheet.doc · Web viewωn : Natural frequency...

Eastern Mediterranean University Department of Mechanical Engineering Laboratory Handout
COURSE : Dynamics of Machinery MENG 331
Semester: Spring (2012-2013)
Name of Experiment: Damped Free Vibrations
Instructor: Assist. Prof. Dr. Mostafa Ranjbar
Submitted by:
Student No:
Group No:
Date of experiment:
Date of submission:
------------------------------------------------------------------------------------------------------------EVALUATION
Activity During Experiment & Procedure 30 %
Data , Results & Graphs 35 %
Discussion, Conclusion & Answer to Questions 30 %
Neat and tidy report writing 5 %
Overall Mark
Name of evaluator: -------------------------------------

DAMPED FREE VIBRATIONS OBJECTIVE
1. To determine the viscous damping coefficient C as a function of the dashpot position
in a certain dynamic system.
2. To learn how to estimate the damping coefficient C of a dynamic system experimentally.
A) DESCRIPTION AND THEORY: All systems possessing mass and elasticity are capable of executing free vibrations, i.e.,
vibrations that take place with the absence of external excitation. The system shown in
Figure 1 is an example here on. If such an ideal undamped and frictionless system is
given a small displacement, it will continue to oscillate without stopping. Such an ideal
system does not exist in the real life due to the existence of internal friction between the
molecules of the beam’s material, due to the friction between the oscillating beam and
surrounding air and due to the friction at the supports of the beam. One can easily notice
that any system, when given a small displacement, its oscillatory motion will decay until
it completely dies out after a while. The rate of decay can be increased by introducing a
dashpot with a damping constant C.
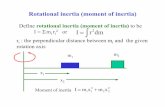
Consider the dynamic system shown in Figure 1. If the beam is pulled down and released,
the equation of the angular motion becomes

where
ωn : Natural frequency of the system
k : Spring stiffness
IA : Mass moment of inertia about point A
ζ : Damping ratio
The response of the system can be found using the solution to the governing differential
equation, which is given by:
Plotting the response using Matlab, the shape of the oscillatory motion, the system
undergoes, is shown in Figure 2.

A convenient way of measuring the amount of damping present in the dynamic system is
to measure the decay of the oscillations. The larger the damping, the greater will be the
rate of decay, which is expressed as logarithmic decrement. The logarithmic decrement
is defined as the natural logarithm of the ratio of any two successive amplitudes, i.e.
δ = ln(θ1/θ2) , as shown in Fig.2. The logarithmic decrement can be found by any of the
following equations:
Both of these equations can be used to evaluate the damping coefficient of any free
vibrating system with damping. However, the second equation is more accurate, since the
determination of δ is very sensitive to any inaccuracy in the amplitude measurements.
The amount of damping in a dynamic system C is usually assessed by any of the
following equations

where τd is the damped time period. Both methods if used to determine the damping
constant C are supposed to giver similar results.
EXPERIMENTAL PROCEDURES: APPARATUS
A rectangular beam, which supported at one end (A) by a trunion, pivoted in ball
bearings and all located in a fixed housing. The outer end of the beam is supported by a
helical spring of stiffness k. The free vibrations of the system are damped by means of a
dashpot, fixed to the base by sliding bracket. The dashpot consists of a transparent
cylindrical container filled with oil. Inside the container, there are two discs each with
several orifices. The two discs can be rotated relatively to each other to change the
damping characteristics of the dashpot
The amplitude time recording is provided by the chart recorder, which is clamped to the
right hand upright. The unit consists of a slowly rotating drum driven by a synchronous
motor. The motor is operated from the Auxiliary supply on the speed control unit. A roll
of recording paper is fitted adjacent to the drum and is wound a round the drum so that
the paper is driven at constant speed. A felt-tipped pen is fitted to the free end of the
beam and the drum may be adjusted in the horizontal plane so that the pen just touches
the paper. The paper is guided vertically downwards by a small attachable weight. By
switching on the motor, a trace can be obtained showing the oscillations of the end of the
beam.
EXPERIMENTAL PROCEDURES AND REQUIREMENTS:1. Record all dimensions needed for your analysis.
2. Pull the beam downward with the dashpot unattached and release it, while the
drum is rotating. Record the total time required for the motion.

3. Clamp the dashpot at a certain distance h along the beam and pull down on the
free end of the beam and release it. Draw the decaying curve on the recording
drum, while it is rotating.
4. Vary the damping characteristics of the system by moving the dashpot to a new
position and obtain a new record of the decaying curve.
5. Repeat steps 3 & 4 to get the records for 8 different positions of the dashpot.
6. From the resulting plot in step # 2 above, obtain the undamped natural time period
n and based on that calculate the natural (undamped) frequency of the system
ωn=2π/τn.
7. From the resulting plots in steps (3 through 5 above), obtain the damped natural
frequencies ωd = 2π/d of the system in each case (for each h length). The damped
period can be determined by using the decaying curve drawn on the recording
drum. Assuming that the length of n oscillations is measured to be x and the drum
speed v is known in inch/sec, then the damped period can be found as:
8. Determine the damping constant C of the system in each of the cases using both
equations mentioned earlier for calculating the damping constant. (Hint: You
might want to use
to determine the spring stiffness k. Note that the mass of the beam is known or
can be determined.

9. Use the following Matlab code as a guide to compare your experimental results
with the calculated results using the code.
EXPERIMENTAL RESULTS:
Parameter L l m IA
Value
Table 1: Values of apparatus parameters
Un-Damped
Parametersτn ωn m k
Table 2: The undamped parameter (damper is unattached)
Run. No. h τn Δ ζ ωd
Table 3: Obtained and calculated values for listed parameters
RESULTS and DISCUSSION:1. What would be the reason of discrepancy in values of C between using

,
Answer 1:
2. Which one of the equations;
Would you use to get a more accurate account of damping presence in the system?
Answer 2:
3. How would you find the spring stiffness constant k?
Answer 3:
4. what suggestions would you make to improve the accuracy of the experiment?
Answer 4:
.