Maneuvering predictions in the early design phase using...
18
29th Symposium on Naval Hydrodynamics Gothenburg, Sweden, 26-31 August 2012 Maneuvering predictions in the early design phase using CFD generated PMM data Claus D. Simonsen, Janne F. Otzen, Christian Klimt, Nikolaj L. Larsen (FORCE Technology, Denmark) and Frederick Stern (IIHR, University of Iowa, USA) Abstract The present paper covers the work made in order to be able to perform standard deep water IMO manoeuvring simulations based on a combination of computed and measured hydrodynamic input data. Based on a full set of measured PMM data a reduced test matrix was identified and the standard 10-10 and 20-20 zigzag and the 35 turning circle manoeuvres was simulated. Based on the reduced test matrix all the static PMM conditions were computed with the RANS code STAR-CCM+ in order to obtain the hydrodynamic forces and moments. The computed static PMM data was subsequently used to replace the corresponding measured static PMM data in the simulations. Comparison between the computed and measured forces and moments showed a quite good agreement. Formal verification and validation, taking numerical and experimental uncertainties into account, was made for a selected condition. The result showed that the X-force is validated, while the Y-force and the yaw moment are not. For the simulated manoeuvres, the results also look promising, since reasonable good agreement was found when comparing the simulated turning circle and zigzag manoeuvres, obtained with measured and computed input data. Introduction Today manoeuvring simulators are used to find the trajectory of the ship in arbitrary manoeuvres. During the ship design phase, focus is mainly on the requirements to the IMO standard manoeuvres (10/10 and 20/20 zigzag and 35 turning circle), which the new ship must comply with. The simulator models are based on integral quantities and the idea is to solve the equations of motion together with large measured sets of hydrodynamic force/moment data. The major advantage of the simulators compared to CFD is their ability to simulate general manoeuvres in real time. But, since they rely on usage of experimental PMM data, which is costly and time consuming to produce, they are usually used late in the design phase, after the final hull form is known and the scale model can be built. Consequently, the manoeuvring characteristics of the ship are evaluated late in the design process. Using CFD instead of the experiment for the data generation would not require the scale model and the simulation could therefore be done earlier in the design process. It is well known that CFD requires much CPU time when it comes to producing hydrodynamic force/moment data by sweeping through large test matrices. But, taking into account how much extra useful information the CFD results provide about the flow field, this is acceptable. Maneuvers have traditionally been simulated by empirical methods, for instance as done in Agdrup (2008) or by simulators based on mathematical models using experimental rotating arm or PMM data, for instance as done in Otzen (2008). The application of CFD in connection with maneuvering has shown promising results in the past. However, much of the work performed so far has primarily focused on individual PMM conditions like static drift and static rudder configurations, e.g. Simonsen and Stern (2003), Simonsen and Stern (2005) and Simonsen et. al (2006) or pure yaw, e.g. Simonsen and Stern (2008). The SIMMAN2008 manoeuvring workshop, showed the same tendency, except for very few cases where CFD was used to predict the final manoeuvres directly. Only one participant, Hochbaum et. al (2008), tried the approach used in this present paper, i.e. CFD based PMM. The approach was somewhat simplified, since effects of free surface and dynamic sinkage and trim were not taken into account, but even so quite good results were obtained for the final manoeuvres. Based on above, the objective of the current work is to be able to perform standard deep water IMO maneuvering simulations in the early design phase purely based on computed input data, i.e. without using experimental data. This also includes investigations on how the numerical PMM test can be reduced to minimize the computational effort, while still
Transcript of Maneuvering predictions in the early design phase using...

29th Symposium on Naval Hydrodynamics Gothenburg, Sweden, 26-31 August 2012
Maneuvering predictions in the early design phase using
CFD generated PMM data
Claus D. Simonsen, Janne F. Otzen, Christian Klimt, Nikolaj L. Larsen (FORCE Technology, Denmark) and
Frederick Stern (IIHR, University of Iowa, USA) Abstract
The present paper covers the work made in order to be able to perform standard deep water IMO manoeuvring simulations based on a combination of computed and measured hydrodynamic input data. Based on a full set of measured PMM data a reduced test matrix was identified and the standard 10-10 and 20-20 zigzag and the 35 turning circle manoeuvres was simulated. Based on the reduced test matrix all the static PMM conditions were computed with the RANS code STAR-CCM+ in order to obtain the hydrodynamic forces and moments. The computed static PMM data was subsequently used to replace the corresponding measured static PMM data in the simulations. Comparison between the computed and measured forces and moments showed a quite good agreement. Formal verification and validation, taking numerical and experimental uncertainties into account, was made for a selected condition. The result showed that the X-force is validated, while the Y-force and the yaw moment are not. For the simulated manoeuvres, the results also look promising, since reasonable good agreement was found when comparing the simulated turning circle and zigzag manoeuvres, obtained with measured and computed input data. Introduction Today manoeuvring simulators are used to find the trajectory of the ship in arbitrary manoeuvres. During the ship design phase, focus is mainly on the requirements to the IMO standard manoeuvres (10/10 and 20/20 zigzag and 35 turning circle), which the new ship must comply with. The simulator models are based on integral quantities and the idea is to solve the equations of motion together with large measured sets of hydrodynamic force/moment data. The major advantage of the simulators compared to CFD is their ability to simulate general manoeuvres in real time. But, since they rely on usage of experimental PMM data, which is costly and time consuming to produce, they are usually used late in the design phase, after the
final hull form is known and the scale model can be built. Consequently, the manoeuvring characteristics of the ship are evaluated late in the design process. Using CFD instead of the experiment for the data generation would not require the scale model and the simulation could therefore be done earlier in the design process. It is well known that CFD requires much CPU time when it comes to producing hydrodynamic force/moment data by sweeping through large test matrices. But, taking into account how much extra useful information the CFD results provide about the flow field, this is acceptable.
Maneuvers have traditionally been simulated by empirical methods, for instance as done in Agdrup (2008) or by simulators based on mathematical models using experimental rotating arm or PMM data, for instance as done in Otzen (2008). The application of CFD in connection with maneuvering has shown promising results in the past. However, much of the work performed so far has primarily focused on individual PMM conditions like static drift and static rudder configurations, e.g. Simonsen and Stern (2003), Simonsen and Stern (2005) and Simonsen et. al (2006) or pure yaw, e.g. Simonsen and Stern (2008). The SIMMAN2008 manoeuvring workshop, showed the same tendency, except for very few cases where CFD was used to predict the final manoeuvres directly. Only one participant, Hochbaum et. al (2008), tried the approach used in this present paper, i.e. CFD based PMM. The approach was somewhat simplified, since effects of free surface and dynamic sinkage and trim were not taken into account, but even so quite good results were obtained for the final manoeuvres.
Based on above, the objective of the current work is to be able to perform standard deep water IMO maneuvering simulations in the early design phase purely based on computed input data, i.e. without using experimental data. This also includes investigations on how the numerical PMM test can be reduced to minimize the computational effort, while still

29th Symposium on Naval Hydrodynamics Gothenburg, Sweden, 26-31 August 2012
producing sufficient information to give reliable maneuvering simulations. Approach
All the experimental and numerical activities in the present work are focused on the appended KCS containership, which, according to the 24th Maneuvering Committee ITTC Report, is appointed as one of the benchmark ships within the maneuvering community.
A full standard test matrix for the PMM test is defined and the PMM test is conducted in FORCE Technology’s towing tank in Denmark. Based on this full data set, a mathematical model for the simulator is made and the IMO maneuvers are simulated. A reduction of the full test matrix is then made by removing points from the matrix and corresponding maneuvering simulations are performed to study the influence on the maneuvers, which will be quantified by overshoot angles and turning circle diameters. For each of the simulations the resulting maneuvers will be compared to the initial reference case obtained with the full matrix to quantify the changes. Based on this work, the test matrix for the computational work will be chosen.
With the reduced test matrix, CFD computations will be made for all the conditions and the resulting X and Y forces and the yaw moment for each condition will be compared with data from the measurement as a point to point comparison. The computations are performed with the RANS solver Star-CCM+. Finally, all the computed force and moment results will be included in the simulator model in order to rerun the maneuvering simulations based on the numerical data input. The simulated maneuvers will be compared with the results from the previous simulations based on the measured data with full and reduced test matrix.
The structure of the paper is as follows. First the model test is presented. This is followed by a presentation of the CFD work. In this connection, point to point comparison of all measured and computed quantities will be made. Next part covers the maneuvering simulations, i.e. the applied mathematical model and simulations based on measured PMM data and the reduction of test matrix. Finally, simulations will be made where the EFD data from the static conditions in the reduced test matrix are replaced with data computed with CFD. The result based on EFD and CFD will be compared to conclude about how well the CFD based input data performs.
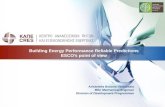
Data generation based on model testing The model testing is carried out in FORCE Technology’s towing tank with a scale model of the KCS container ship using a scale of 1:53.667. The towing tank is 240m long, 12m wide and 5.5m deep.
Figure 1. PMM model test setup at FORCE Technology.
The main particulars and propeller data for the ship are shown in Table 1. The approach speed for the manoeuvres is U0=1.701 m/s (24.0 knots full scale) corresponding to a Froude number of 0.26. The test is described in detail in Larsen (2012), so only a brief summary is given here.
Table 1: Hull and propeller data.
Lpp [m] 4.3671 B [m] 0.6114 T [m] 0.2051 S [m2] 3.4357 CB [-] 0.651 DP [m] 0.150 Z [no. of blades] 5 P/D0.7 [-] 1.300
The considered experimental test conditions cover
a set of tests, which are representative for a 1st quadrant 4 DOF PMM test and which can be used for assessment of the experimental uncertainty for representative conditions. The PMM testing technique enables various test conditions to be studied individually. The conditions, which are considered in this work, are “static rudder”, “static drift”, “static drift and rudder”, “static heel” “static heel and drift”, “pure sway”, “pure yaw” “yaw and rudder”, “yaw and drift” and “yaw and heel”. In the static test the model is towed in the same steady condition through the tank. The other tests are dynamic, i.e. the model is oscillating harmonically. In the present paper focus is placed on 3 DOF simulations, which means that only a subset of the conditions is covered, leaving all quantities related to heel and roll out. The contents of the considered test tests can be summarized as follows:

29th Symposium on Naval Hydrodynamics Gothenburg, Sweden, 26-31 August 2012
“Static rudder”:
The model travels straight ahead through the tank with the rudder in a given angle δ. “Static drift”:
The model travels through the tank in oblique flow due to a given drift angle β. “Static drift and rudder”:
Same as “Static drift” but the rudder is deflected. “Pure sway”:
The model travels through the tank on straight ahead course while it is oscillated from side to side. With u, v and r being the surge velocity, the sway velocity and the yaw rate in the ships local coordinate system, the pure sway motion can also be expressed in terms of the velocities, i.e. u=Uc (carriage speed), r=0 and v oscillates harmonically. “Pure yaw”:
The model travels through the tank while it performs a pure yaw motion, where it is forced to follow the tangent of the oscillating path. In terms of velocities this means that v=0, while r and u oscillate harmonically. u oscillates, since the carriage speed in the present set-up is constant.
“Yaw and rudder”: Same as “Pure yaw” but the rudder is deflected.
“Yaw and drift”:
The model travels through the tank, while it performs a pure yaw motion as described in “Pure yaw”. However, a fixed and preset drift angle is overlaid on the motion in order to obtain a drift angle relative to the tangent of the oscillating path. In terms of velocities this means that v≠0, but constant, while r and u oscillate harmonically.
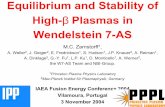
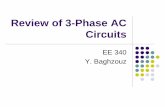
For all of the above conditions, the tests were conducted according to FORCE’s standard PMM testing procedures. This means that the model was constrained in all degrees of freedom except for heave and pitch to account for dynamic sinkage and trim. The PMM setup is shown in Figure 1. During the test the model is equipped with propeller and rudder. The propeller RPMs are kept constant at the model’s self propulsion point. The model is shown in Figure 2 and Figure 3, where the sand strips used for turbulence stimulation can also be seen. The PMM test program is carried out for speeds down to 0.35U0 corresponding to a Froude number of 0.091. The test program carried out including the repeat tests for the uncertainty assessment are shown in Table 2.
Table 2: PMM test programme for the design condition. U0 is nominal approach speed and N0 is corresponding impeller revolutions.
Speed [1/U0]
Revs. [1/N0]
Drift angle [deg]
Rudder angle [deg]
Sway velocity
[-]
Yaw velocity
[-] Standard program
Static speed 0.61.0 1.0 0 0 0 0
Static drift 0.61.0 1.0 -2020 0 0 0
Static rudder 0.61.0 1.0 0 -3535 0 0
Drift & rudder 0.60.78 1.0 -2020 -3535 0 0
Pure sway 0.781.0 1.0 0 0 0.0350.21 0
Pure yaw 0.351.0 1.0 0 0 0 0.050.8 Yaw & drift 0.350.78 1.0 -2020 0 0 0.40.8 Yaw & rudder 0.350.78 1.0 0 -2020 0 0.40.8
Repeated tests (no. of repeats) Static drift (13,12) 0.78, 1.0 1.0 8 0 0 0 Static rudder (12) 0.78 1.0 0 10 0 0 Pure sway (4) 0.78 1.0 0 0 0.14 0 Pure yaw (12) 0.78 1.0 0 0 0 0.4

29th Symposium on Naval Hydrodynamics Gothenburg, Sweden, 26-31 August 2012
Figure 2. Bow of KCS model with sand strips for turbulence stimulation
Figure 3. Stern of KCS model with rudder and propeller.
During the test the instantaneous operating conditions for the ship like speeds, positions etc. are measured together with the resultant forces. All forces are measured in a coordinate system following the ship, meaning that X-components act in the longitudinal direction of the ship (positive forward) and Y-components perpendicular to this direction (positive starboard). The yaw moment is taken with respect to the mid-ship position at /2. All hydrodynamic forces and moments presented in the present work are non-dimensionalized by the data reduction equations shown below. It should be mentioned that for the static conditions, the hydro dynamic forces and moments are equal to the measured quantities, i.e.
ppm
X
LT
Fmeasured
2'
Uρ0.5X (1)
ppm
Y
LT
Fmeasured
2'
Uρ0.5Y (2)
2pp
2'
LUρ0.5N
m
Z
T
Mmeasured (3)
while in the dynamic cases the measured quantities include inertial contributions due to acceleration of the ship. In this case the inertial contributions are subtracted from the measured quantise to get the hydrodynamic part as
ppm
GGX
LT
rYrXrvuMFmeasured
2
2'
Uρ0.5
)(X
(4)
ppm
GGY
LT
rXrYruvMFmeasured
2
2'
Uρ0.5
)(Y
(5)
2pp
2'
LUρ0.5
))()((N
m
GGZZ
T
rvuYruvXMrIMmeasured
(6)
, and are the longitudinal force, the transverse force and the yaw moment, respectively. is the water density. √ is the ship speed, where u and v are the surge and sway velocities respectively. r is the yaw rate. Finally, the dots above the velocity quantities indicate the corresponding accelerations. See Figure 4.
and are the mean draft and the length between perpendiculars. and are the mass and moment of inertia of the model, i.e. of the model itself, the gauges and the ballast weights. and are the X- and Y-distances from the center of gravity of the model to the point, which the model rotates around.
Figure 4. Definition of state variables.

29th Symposium on Naval Hydrodynamics Gothenburg, Sweden, 26-31 August 2012
A part of the experimental work also covered
assessment of the experimental uncertainty. Following the approach in ITTC 1999a and b and Simonsen 2004 the uncertainty assessment, which covers both precision and bias limits, is based on the data reduction equations for the forces and moments listed above. The uncertainties are expressed as
222''' XXX
PBU (7)
222
''' YYYPBU (8)
222
''' NNNPBU (9)
B and P are the bias (systematic errors) and precision (random errors) limits, respectively. The bias contributions are found by sensitivity analysis of the data reduction equations and error estimates related to the individual components of the measurement system, The bias limits are assessed based on a study of the measuring system. According to ITTC 1999a they can be estimated on the basis of
J
i
J
i
J
ikikkiiir BBB
1
1
1 1
222 2 (10)
where is the influence coefficient defined by
ii X
r
(11)
is the bias limits in and is the correlated bias limits in and .
L
kiik BBB1
)()(
(12)
where is the number of correlated bias error sources that are common for measurement of variables and
. The bias error for each variable in the data reduction equation may consist of a number of bias errors, so in order to calculate the combined bias error the root-sum-square is used
J
kkii BB
1
22 )( (13)
is the number of the considered variable in the data
reduction equation.
The precision limits are assessed through repeated tests, which are built into the test program. The model has not been dismounted from the carriage during the test, so in order to “disturb” the system the repeat tests has been mixed with the other test configurations. According to ITTC 1999a the precision limit is estimated from
M
SP r
r2
(14)
where is the number of repeats and the factor of 2 is applied for 10. is the standard deviation defined as
½
1
2
1
)(
M
k
kr M
rrS (15)
Here is the value from each repeat test and is
the mean value of all the quantities from the repeat tests. is defined as
M
kkrM
r1
1 (16)
Table 3. Uncertainties for “static drift”, β=8°,
Fr=0.201.
X’ Y’ N’
´ 0.000736 0.000798 0.000285
´ 0.000214 0.000246 0.000047
´ 0.000766 0.000836 0.000289 ´ 0.0180 0.0397 0.0127
% ´ 4.26 2.10 2.28 The uncertainty assessment procedure is very
extensive and is not described here. It has only been done for a few conditions as spot checks of the uncertainty level. It is described in details in Larsen (2012). Table 3 and Table 4 show the results of the uncertainty assessment for the “static drift” case with
8 , and “static rudder” case with 10 , respectively at model speed of 1.318m/s, i.e. 0.775U0.
Table 4. Uncertainties for “static rudder”, δ=10°,
Fr=0.201.
X’ Y’ N’
´ 0.000724 0.000705 0.000228
´ 0.000160 0.000408 0.000218
´ 0.000742 0.000815 0.000316 ´ 0.0165 0.0150 -0.0077
% ´ 4.50 5.45 4.11

29th Symposium on Naval Hydrodynamics Gothenburg, Sweden, 26-31 August 2012
The level of the uncertainties is higher than for a
resistance test, but this is to be expected since the PMM test is conducted with a two-gauge system, which typically gives higher uncertainties than a single gauge system. The uncertainty level seems reasonable and the level is comparable to other to PMM tests in Benedetti et al. (2006), Yoon (2009) and Simonsen (2004).
With respect to the measured data, examples are
shown in Figure 8 to Figure 19 in the section below, in connection with the discussion of the comparison between computed and measured PMM data.
Data generation based on CFD computations
The CFD computations in the present work are supposed to replace both dynamic and static PMM conditions. However, at present time of writing the dynamic conditions are not completed, so only results for static cases are covered.
Computational method
The computations are performed with the Reynolds Averaged Navier-Stokes (RANS) solver STAR-CCM+ from CD-adapco. The code solves the RANS and continuity equations on integral form on an unstructured mesh by means of the finite volume technique. Both steady state and transient calculations are considered depending on the considered test condition. For the steady state calculations the temporal discretization is based on a first order Euler difference, while a second order difference is used for transient calculations. Spatial discretization is performed with second order schemes for both convective and viscous terms. The pressure and the velocities are coupled by means of the SIMPLE method. Closure of the Reynolds stress problem is achieved by means of the isotropic blended k-ε/k-ω SST turbulence model with an all Y+ wall treatment, which depending on the Y+ value selects the near wall treatment. The rotating propeller is not modelled directly, as this requires very long computational times that are not realistic when computing a large number of cases. Therefore, a prescribed body force propeller is applied instead as is commonly done for this type of simulations. The propeller model is based on a radial varying body force field, which follows the variation of a theoretically derived circulation distribution. It is prescribed by means of the ship speed based advance coefficient and the propeller coefficients and . The model is integrated in the CFD-code, where the axial and tangential force components are given by
h*
h
**
θθ**
XXrrr
rrAfb,rrAfb
)1(
11 (17)
Where the non-dimensional propeller and hub radii are
defined by )1()( hh* r/rrr and phh /RRr . With
∆ being the longitudinal extension of the disk divided by the ship length, the coefficients and are defined by
hh
Thx rrxΔ
CA
13416
105 (18)
hhV
Qθ rrπJxΔ
KA
134
1052
(19)
The free surface is modelled with the two phase
volume of fluid technique (VOF). Further details about the code can be found in STAR-CCM+ user guide (2012). Finally, it must be noted that all computations are done in model scale with a model similar to the one used in the model test.
The motions of the ship are described in terms of
an earth-fixed inertial reference coordinate system and a ship fixed coordinate system. The motion of the ship, i.e. translations and rotations, are described with respect to the inertial frame. The linear and angular velocities plus the forces and moments are described with respect to the ship-fixed frame. In the present calculation, three degrees of freedom are considered and the ship motions in surge, sway and yaw are all prescribed. The motions are applied in the earth-fixed frame by mowing the complete computational domain and hereby introduce grid velocities according to the considered motion. This applies to both static conditions like static drift where the ship is moved with constant speed to obtain the desired drift angle and to dynamic tests like pure yaw motion, which are not covered in this paper. Heave and pitch motions in terms of dynamic sinkage and trim are taken from the model test, so they are not predicted in the CFD solver. The thrust and torque values applied in the prescribed body-force model are also taken from the model test. Computational domain
The computational mesh is based on the trimmed mesh approach, which means that the mesh is dominated by hexahedral cells in most regions except close to the hull where the hull surface is used to trim the hexahedral cells leaving a set of polyhedral cells. Further, prism layer mesh is used near the hull surface to resolve the boundary layer flow. Concerning boundary conditions on the domain, an inlet condition

29th Symposium on Naval Hydrodynamics Gothenburg, Sweden, 26-31 August 2012
prescribing the inlet velocity and the still water level for the volume fraction is given up-stream of the model and on the sides of the domain. On the outlet boundary a pressure condition is applied in order to have zero gradients for the velocity and volume fraction and prescribed hydrostatic pressure. On the top and bottom of the domain, slip walls are applied so there is no flow through the boundary. The inlet boundary is located 4.0 ship lengths from the ship, Outlet and sides are located 6.4 and 5.0 ship lengths from the ship, respectively.
Figure 5. Illustration of domain boundaries.
Figure 6 and Figure 7 show the computational
mesh in the bow and stern regions, respectively. Refinement zones are applied in the free surface region and on the hull where the wave formation is expected to take place.
Figure 6. Mesh in bow region.
Figure 7. Mesh in bow region.
Verification and validation
Concerning verification focus is on mesh sensitivity. To study the sensitivity of the mesh size on the results one condition has been picked to be investigated. Three different grid sizes have been used and the corresponding forces have been evaluated for a static drift condition with 20 degrees drift angle at model speed of 1.318m/s, i.e. 0.775U0. Further, no running body-force propeller is included in this case. With the unstructured mesh, it is not possible to make a completely systematic grid refinement, since it is not possible to directly control the size of the individual cells. However, all mesh quantities are given as a percentage of a base size, so in order to change the grid as systematically as possible the coarse (No. 3), medium (No. 2) and fine (No. 1) grids were made by changing the base size with a constant factor. Based on the three grids, the CFD simulations were conducted and the longitudinal X-force, X, the transverse Y-force, Y, and the yaw moments, N, taken around the Z-axis at mid-ship position were computed.
It is difficult to estimate the grid uncertainty for
unstructured meshes, so in lieu of an uncertainty method for unstructured meshes and since the present grid is hexahedral dominated, it has been attempted to estimate the grid uncertainty based on Richardson extrapolation. Solutions were obtained on 3 systematically refined grids by means of the refinement ratio, √2. This gave mesh sizes ranging from approximately 1.5 to 7.0 million cells. Exact grid numbers and computed force and moment coefficients can be seen in Table 5. Forces and moments are non-dimensionalized with ½ and ½ respectively.

29th Symposium on Naval Hydrodynamics Gothenburg, Sweden, 26-31 August 2012
Table 5: Non-dim forces and moments for different
grids.
No. of cells X’ Y’ N’ 1,491,946 -0.0208 0.1372 0.0451 3,068,474 -0.0214 0.1442 0.0446 6,969,575 -0.0211 0.1473 0.0451
The grid uncertainty is estimated according to
the procedure given in Stern et al. 2001 and Wilson et al. 2004. Briefly, the procedure is as follows. The changes in solutions between coarse and medium grids,
2332SSG , and between medium and fine grids,
1221SSG , are used to calculate the convergence
ratio 3221
/ GGGR . Depending on the value of
three conditions can occur: i) 0 1, grid convergence, ii) 0, oscillatory convergence and iii) 1 , grid divergence. In condition iii) no uncertainty can be estimated. In condition ii) the uncertainty is estimated by
)½( LUG SSU (20)
where US and LS are the maximum and minimum of
the solutions from the considered grids. In condition i) grid convergence occurs and generalized Richardson extrapolation (RE) is used to estimate the grid error
)1*(1GRE and the order of accuracy Gp , which are given
as
121
1
)1(*
GG pG
GRE
r
(21)
and
)ln(
/ln2132
G
GGG r
p
(22)
2312 // GGGGG xxxxr is the refinement
factor, which defines the relation between the
considered grids. When )1*(1GRE and Gp are know it is
possible to estimate the grid uncertainty. There are two ways to do this depending on whether the solutions are close to the asymptotic range or not. If the correction factor defined by
1
1
Gest
G
pG
pG
Gr
rC (23)
where Gestp is the limiting or theoretical accuracy of
the applied numerical method, is close to unity, the solutions are close to the asymptotic range. In this case the sign of the error is known, so the numerical error,
*SN , benchmark, CS and uncertainty, GCU can be
calculated from
)1*(*1GREGSN C (24)
*SNC SS (25)
125.01,1
125.01,)1.0)1(4.2(
*
*2
1
1
GREG
GREG
GCCC
CCU
G
G
(26) If the correction factor is away from unity only the numerical uncertainty is calculated
125.01,)112(
125.01,)1.1)1(6.9(
*
*2
1
1
GREG
GREG
GCC
CCU
G
G
(27)
Table 6: % change in non-dim forces and moments between grids.
% Change X’ Y’ N’ 3 to 2 -2.74 -4.74 1.14 2 to 1 1.28 -2.12 -0.97
Table 7: Estimated order of accuracy and grid uncertainty.
Quantity Gp GU GU % 1S
X’ Oscill. 0.00029 1.4 Y’ 2.3 0.00372 2.5 N’ Oscill. 0.00026 0.6 Table 6 shows the change in quantities between
grids. It is seen that all quantities are converging as the grid is refined, but both X’ and N’ show oscillatory convergence, i.e. the order of accuracy cannot be estimated. For Y’ Table 7 shows that an order of accuracy of 2.3 is achieved. This is close to the theoretical order of accuracy of 2. Finally, Table 7 also shows the estimated grid uncertainty, which ranges from 0.6 to 1.4 % of the fine grid solution. It should be noted that if the solution for Y’ is corrected with the

29th Symposium on Naval Hydrodynamics Gothenburg, Sweden, 26-31 August 2012
numerical error, the grid uncertainty can be reduced to 2.3%.
In order to validate the computations against
measurements, the measured data shown in Table 8 are used. No specific uncertainty assessment was made for the un-propelled 20 degrees static drift case, so the uncertainty estimates from the propelled 8 degrees drift case is applied, by assuming that the percentage in Table 3 is representative for the un-propelled case.
Table 8: Measured values and data uncertainty
Quantity D DU DU % D
X’ -0.0220 0.00094 4.26 Y’ 0.1551 0.00326 2.10 N’ 0.0434 0.00099 2.28
Table 9: Validation investigation.
Quantity E=D-S VU E % D
X’ 0.00086 0.00098 3.90 Y’ -0.00779 0.00494 5.03 N’ 0.00167 0.00102 3.84 To finally check if Validation has been obtained it
is necessary to check if the absolute comparison error E is smaller than the validation uncertainty calculated as
22DGV UUU , i.e. if the comparison error is within
the combined noise from the CFD simulation and the experiments. From Table 9 it is seen that the computation agrees with the measurement within approximately maximum 5%, so the agreement is pretty good taking into account that it is a pretty complex flow field at 20 degrees drift angle. However, in spite of this it is only X´ that is validated.
Taking into account that going from medium to fine grids will only change the results with approximately 2% while the computational time will be more than doubled, it was judged that the medium mesh was sufficient for the present study, which has much focus on computation of large data sets for practical application. It should also be mentioned that later in the project it was necessary to increase the mesh size a little in order to have a mesh that work for non-zero rudder angles. Therefore, the final mesh used for the production runs contains app. 3.57 million cells, which is a little finer than the initial medium mesh. It was designed to give a Y+ of maximum 75.5 and an average over the hull of 23.5.
After the verification and validation work, all the
production runs for the static maneuvers to be used in the simulator model were made. The figures below show comparisons between CFD and EFD for all the computed cases, which cover static drift, static rudder and the combined static drift and rudder conditions. As
mentioned earlier only static CFD data will be used as input for the simulator, as the dynamic computations are not finalized at the present time of writing.
Figure 8 to Figure 10 show the computed and
measured non-dimensionalized forces and moments, X´, Y´and N´ as function of the rudder angle for three different speeds. For X´ it is seen to be close to 0 and negative for the highest speed, whereas it increases to larger positive values as the speed is reduced. This means that the propeller is over-thrusting at the lower speeds. However, based on the applied constant RPM approach, where the propeller RPMs are kept constant at service speed self-propulsion point, the propeller will deliver too much thrust at the lower speeds giving the observed behavior. It is seen that the CFD computations generally predicts X´ fairly well. The slightly larger deviations at large negative rudder angles are probably related to the simplified propeller model not being able to capture the rudder propeller interaction.
‐0.020
‐0.010
0.000
0.010
0.020
0.030
0.040
0.050
0.060
‐40 ‐20 0 20 40
X´
Rudder angle [deg]
CFD, Fr=0.260
EFD, Fr=0.260
CFD, Fr=0.201
EFD, Fr=0.201
CFD, Fr=0.156
EFD, Fr=0.156
Figure 8. Computed and measured non-dim X force for “static rudder”.
‐0.080
‐0.060
‐0.040
‐0.020
0.000
0.020
0.040
0.060
0.080
‐40 ‐20 0 20 40
Y´
Rudder angle [deg]
CFD, Fr=0.260
EFD, Fr=0.260
CFD, Fr=0.201
EFD, Fr=0.201
CFD, Fr=0.156
EFD, Fr=0.156
Figure 9. Computed and measured non-dim Y force for “static rudder”.
For Y´ good agreement between EFD and CFD is also observed. Increased rudder angle leads to increased Y-force which makes sense since the rudder lifts more at higher rudder angles. It is seen that the slope of the curves increases as the speed is reduced and the weak non-linearity occurs at the larger rudder angles.

29th Symposium on Naval Hydrodynamics Gothenburg, Sweden, 26-31 August 2012
‐0.040
‐0.030
‐0.020
‐0.010
0.000
0.010
0.020
0.030
0.040
‐40 ‐20 0 20 40
N´
Rudder angle [deg]
CFD, Fr=0.260
EFD, Fr=0.260
CFD, Fr=0.201
EFD, Fr=0.201
CFD, Fr=0.156
EFD, Fr=0.156
Figure 10. Computed and measured non-dim yaw moment for “static rudder”.
N´ also shows increased slope of the curves as the speed is reduced and the weak non-linearity at the larger rudder angles. This behavior is expected as the yaw moment for the static rudder case to a large degree is caused by the rudder lift force. Again good agreement between EFD and CFD is observed.
Figure 11 to Figure 13 show the computed and measured non-dimensionalized forces and moments, X´, Y´and N´ as function of the drift angle for three different speeds. Again X´ shows the effect of the constant RPM approach discussed above. Further, it can be noticed that the largest deviations occur at the lowest speed, which presumably is caused by the body-force propeller not being able to model the propeller flow in the case where the propeller loading is increasing. However, in spite of the difference, the CFD code generally predicts the force fairly well compared to the measurement, plus it is able to capture variation in X´ with the drift angle.
‐0.010
0.000
0.010
0.020
0.030
0.040
0.050
0.060
‐20.0 ‐10.0 0.0 10.0 20.0
X´
Rudder angle [deg]
CFD, Fr=0.260
EFD, Fr=0.260
CFD, Fr=0.201
EFD, Fr=0.201
CFD, Fr=0.156
EFD, Fr=0.156
Figure 11. Computed and measured non-dim X-force for “static drift”.
‐0.150
‐0.100
‐0.050
0.000
0.050
0.100
0.150
‐20.0 ‐10.0 0.0 10.0 20.0
Y´
Drift angle [deg]
CFD, Fr=0.260
EFD, Fr=0.260
CFD, Fr=0.201
EFD, Fr=0.201
CFD, Fr=0.156
EFD, Fr=0.156
Figure 12. Computed and measured non-dim Y-force for “static drift”.
‐0.040
‐0.030
‐0.020
‐0.010
0.000
0.010
0.020
0.030
0.040
‐20.0 ‐10.0 0.0 10.0 20.0
N´
Drift angle [deg]
CFD, Fr=0.260
EFD, Fr=0.260
CFD, Fr=0.201
EFD, Fr=0.201
CFD, Fr=0.156
EFD, Fr=0.156
Figure 13. Computed and measured non-dim yaw moment for “static drift”.
Figure 12 and Figure 13 show Y´ and N´ for the three speeds. Compared to the static rudder case it is here seen that the non-dimensionalization basically collapses the force and moment curves into one curve, which is often seen for the static drift force and moment. It is also seen that as the drift angle is increased the Y-force becomes non-linear. The yaw moment also shows non-linearity, but not as pronounced as the Y-force. Further, it seems that the non-linearity in N´ is more pronounced for lower speeds. Concerning the comparison between model test and CFD results, it appears the computation agrees well with the measurement.
The final set of results to be shown covers the
static drift and rudder results. Figure 14 to Figure 16 show the forces and moments as function of the rudder angle for the two negative drift angles β=-4° and β=-12°, while Figure 17 to Figure 19 show the forces and moments as function of the rudder angle for two corresponding positive drift angles β=4° and β=12°.

29th Symposium on Naval Hydrodynamics Gothenburg, Sweden, 26-31 August 2012
0.000
0.010
0.020
0.030
0.040
0.050
‐40.0 ‐20.0 0.0 20.0 40.0
X´
Rudder angle [deg]
CFD, Fr=0.201, β=‐4°
EFD, Fr=0.201, β=‐4°
CFD, Fr=0.156, β=‐12°
EFD, Fr=0.156, β=‐12°
Figure 14. Computed and measured non-dim X-force for “static drift and rudder”. Negative drift angles.
‐0.150
‐0.100
‐0.050
0.000
0.050
‐40.0 ‐20.0 0.0 20.0 40.0
Y´
Rudder angle [deg]
CFD, Fr=0.201, β=‐4°
EFD, Fr=0.201, β=‐4°
CFD, Fr=0.156, β=‐12°
EFD, Fr=0.156, β=‐12°
Figure 15. Computed and measured non-dim Y-force for “static drift and rudder”. Negative drift angles.
‐0.060
‐0.050
‐0.040
‐0.030
‐0.020
‐0.010
0.000
0.010
0.020
‐40.0 ‐20.0 0.0 20.0 40.0
N´
Rudder angle [deg]
CFD, Fr=0.201, β=‐4°
EFD, Fr=0.201, β=‐4°
CFD, Fr=0.156, β=‐12°
EFD, Fr=0.156, β=‐12°
Figure 16. Computed and measured non-dim yaw moment for “static drift and rudder”. Negative drift
angles.
Only the two lower speeds are covered in this
case. The reason is that the test program reflects the conditions the ship will experience during maneuvering and typically the combined drift and rudder angle condition occurs later in the maneuver, where the ship is experiencing a speed loss.
0.000
0.010
0.020
0.030
0.040
0.050
0.060
‐40.0 ‐20.0 0.0 20.0 40.0
X´
Rudder angle [deg]
CFD, Fr=0.201, β=+4°
EFD, Fr=0.201, β=+4°
CFD, Fr=0.156, β=+12°
EFD, Fr=0.156, β=+12°
Figure 17. Computed and measured non-dim X-force for “static drift and rudder”. Positive drift angles.
‐0.050
0.000
0.050
0.100
0.150
‐40.0 ‐20.0 0.0 20.0 40.0
Y´
Rudder angle [deg]
CFD, Fr=0.201, β=+4°
EFD, Fr=0.201, β=+4°
CFD, Fr=0.156, β=+12°
EFD, Fr=0.156, β=+12°
Figure 18. Computed and measured non-dim Y-force for “static drift and rudder”. Positive drift angles.
For all the forces and moments the overall agreement between the measured and computed PMM results is fairly good. Though, it generally seems that it is most difficult to capture the measured data at the lowest speed. One of the main reasons for this is believed to be the propeller model. The rudder load is strongly dependent of the flow over the propeller since it is located in the propeller slip stream. On the other hand the propeller flow is strongly dependent of the wake field behind the ship as this generates the propeller inflow field. The simplified propeller does not really reflect the difference in propeller load distribution over the disk occurring from the change in the wake field that occurs during drift conditions and reduced speed due to the prescribed body-force approach. If the load distribution over the propeller disk is not correct, the distribution of the propeller slipstream velocity that hits the rudder will not be correct, which again means that the rudder performance will be influenced. This again will influence X´, Y´and N´ and probably lead to larger deviations between EFD and CFD, particularly for lower speeds and large drift angles, which also change the wake flow significantly.

29th Symposium on Naval Hydrodynamics Gothenburg, Sweden, 26-31 August 2012
‐0.020
‐0.010
0.000
0.010
0.020
0.030
0.040
0.050
0.060
0.070
‐40.0 ‐20.0 0.0 20.0 40.0
N´
Rudder angle [deg]
CFD, Fr=0.201, β=+4°
EFD, Fr=0.201, β=+4°
CFD, Fr=0.156, β=+12°
EFD, Fr=0.156, β=+12°
Figure 19. Computed and measured non-dim yaw moment for “static drift and rudder”. Positive drift
angles.
Based on the above comparison the idea of generating PMM data on the basis of CFD looks promising. However, the question is if the small differences between EFD and CFD will influence the final maneuvers after applying the data as input to the maneuvering simulator. This is investigated in the following sections where simulations with both EFD and CFD data will be compared. Mathematical model applied for the manoeuvring simulations A mathematical model was generated to determine a specific set of X, Y and N derivative with the most optimal fit to the measured forces of the KCS. The analysis was performed in a classic way where initially the linear Y and N coefficients, Y’v and N’v
were determined from the pure drift test at nominal speed with drift angle in the linear range between +/-4 degrees. These two coefficients were then fixed and included in the following general static analysis where the total matrix of static test data is applied to solve the total matrix of static coefficients, i.e. the remaining static derivatives are determined in a single combined analysis. The two added mass coefficients, vY ' and vN ' was
determined based on a special pure sway analysis which comprised the time series from all the dynamic pure sway tests. The general dynamic analysis was performed similar to the static analysis with a combined analysis for all of the dynamic test types. In the dynamic analysis all the static coefficients were fixed to the values adopted from the static analysis.
The final coefficient formulation applied for the simulation of manoeuvres were output from the dynamic analysis (including the static analysis) supplemented with the two added mass coefficients from the pure sway analysis and an empirical value for the added mass coefficient , which was calculated
as 6 percent of the non-dimensional mass of the vessel. I.e. based on the model tests the final coefficient formulation becomes:
'uX' r'X'
r'X' r'X' v'X' v'X'
v'X' u'X' u'X'X'
X' X' X' r'v'X' r'X
r'X' v'X' v'X' u'X' u'X' X'
X'
'u2
r'
2r'r'r'
2v'
2v'v'
v'2
u'u'4
22r'v'
2r'r'
r'2
v'v'v'2
u'u'u'o'
(28)
'rY' 'vY'
r'v'Y' r'Y' |r'|Y' r'Y'
r'Y' v'Y' |v'|Y' v'Y'
v'Y' u'Y' u'Y' u'Y'
Y' Y' Y' r'v'Y'
|r'|v'Y' r'v'Y' r'|v'|Y' r'Y'
|r'|r'Y' r'Y' r'Y' v'u'Yv'Y'
|v'|v'Y' v'Y' v'Y' u'Y' Y'
Y'
'r'v
r'v'2
r'|r'|2
r'r'
r'2
v'|v'|2
v'v'
v'3
u'2
u'u'
322r'r'v'
|r'|v'2
r'v'v'r'|v'|3
r'r'r'
|r'|r'2
r'r'r'v'u'3
v'v'v'
|v'|v'2
v'v'v'u'o
(29)
'rN' 'vN'
r'v'N' r'N' |r'|N' r'N'
r'N' v'N' |v'|N' v'N'
v'N' u'N' u'N' u'N'
N' N' N' r'v'N'
|r'|v'N' r'v'N' r'|v'|N' r'N'
|r'|r'N' r'N' r'N' v'u'Nv'N'
|v'|v'N' v'N' v'N' u'N' N'
N'
'r'v
r'v'2
r'|r'|2
r'r'
r'2
v'|v'|2
v'v'
v'3
u'2
u'u'
322r'r'v'
|r'|v'2
r'v'v'r'|v'|3
r'r'r'
|r'|r'2
r'r'r'v'u'3
v'v'v'
|v'|v'2
v'v'v'u'o
(30)
In case of a 4DOF model a corresponding set of derivatives for the roll (K) moment would have been generated. However, this has been omitted due to the focus on 3DOF.
Since the vessel is a single screw ship it possesses inherent asymmetry regarding port starboard manoeuvring ability. This asymmetry is reflected in a number of X, Y and N coefficients. The asymmetry is partly due to the propeller side force and partly due to unavoidable asymmetry in the physical model used for the model tests. To account for the scewness of the model, the Y and N forces acting on the model in a bare hull resistance test at drift angle zero is subtracted from

29th Symposium on Naval Hydrodynamics Gothenburg, Sweden, 26-31 August 2012
those measured in the PMM series with the propeller working.
The generated model is strictly speaking only applicable for the given approach speed. In case of different approach speeds the model ought to be re-evaluated to find the corresponding coefficients. Test matrix reduction and simulation results based on EFD
For standard PMM tests a full standard test program (STP) similar to the programme presented in
Table 2 is usually applied. When running just tank tests there has been no significant motivation for minimizing the test programme since the main costs are associated with the initial setup of the model and there has rather been a tendency to utilize the length of the entire towing tank to pick up as many points as possible. This approach is suitable for tank tests, but in connection with numerical model tests where the calculation time is the most expensive “cost”, there is a need to minimize the number of points/calculations.
To evaluate a minimum test programme (MTP), a set of simulated manoeuvres based on MTP were compared to similar manoeuvres based on the STP. To establish whether the MTP was acceptable or not a set of criteria or tolerances were defined. If the initially tested MTP did not meet the defined tolerances the number of measuring points was to be increased until the limits were fulfilled.
The predefined acceptable tolerances between STP and MTP are presented in Table 10.
In order to meet the criteria a number of iterations
were performed increasing the number of data-points in the MTP. Different approaches were tested for example adding points mainly focusing on static points and correspondingly adding points mainly focusing on
dynamic points. The final minimum test program comprised the total matrix of dynamic test points from the STP while the static part only contained 58 data points of the total 82 in the STP. In fact the final MTP did not meet all the tolerances, but it was accepted as close enough and robust enough to fulfill the purpose. The criteria values, i.e. differences between final MTP and STP maneuvering parameter, are listed in Table 11.
The final minimum test matrix is presented in
Table 12.
Table 10: Acceptable tolerances between results of MTP and STP simulated manoeuvres, where zz is
zigzag, OS is overshoot angle, ITA is initial turning ability and tc is turning circle.
10/10 zz 1st OS [deg] +/- 0.5 10/10 zz 2nd OS [deg] 0.8 ITA [Lpp] 0.02 20/20 zz 1st OS [deg] 0.8 20/20 zz 2nd OS [deg] 0.8 35 tc advance [Lpp] 0.05 35 tc tactical diameter [Lpp] 0.05 35 tc steady drift [deg] 1.0
Table 11: Difference between results of MTP and STP simulated manoeuvres.
Port Starboard 10/10 zz 1st OS [deg] -0.7 -0.9 10/10 zz 2nd OS [deg] -1 -1.1 ITA [Lpp] 0.02 0.05 20/20 zz 1st OS [deg] -0.5 -0.9 20/20 zz 2nd OS [deg] -0.6 -0.3 35 tc advance [Lpp] -0.01 0.02 35 tc tactical diameter [Lpp] -0.11 0.02 35 tc steady drift [deg] 0.6 0
Table 12. Minimum PMM test programme for the design condition. The dynamic matrix is not included as this is similar to the STP.
Speed [1/U0] Revs. [1/N0]
Drift angle [deg]
Rudder angle [deg]
Static speed 0.6, 0.78, 1.0 1.0 0 0 Static drift 1.0 1.0 -8, -2, -0.5, 1, 4 0 0.78 1.0 -12, -4, 8, -16 0 0.6 1.0 -12, -8, -4, 0, 4, 8, 12, 16 0 Static rudder 1.0 1.0 0 -35, -20, 10, 30 0.78 1.0 0 -30, -10, 20, 35 0.6 1.0 0 -30, -10, 20, 35 Drift & rudder 0.78 1.0 -4 -20, -10, 0, 10, 20, 30, 35 0.78 1.0 4 -35, -30, -20, -10, 0, 10, 20 0.6 1.0 -12 -20, -10, 0, 10, 20, 30, 35 0.6 1.0 12 -35, -30, -20, -10, 0, 10, 20

29th Symposium on Naval Hydrodynamics Gothenburg, Sweden, 26-31 August 2012
Simulation results based on CFD data
As the next step in line towards a full model test matrix of pure numerical model tests the static part of the found MTP was generated using CFD. The purpose was to substitute the static derivative found from the model tests with static derivatives evaluated from numerical model tests. The numerical data was evaluated just as if they have been recorded in the towing tank, i.e. the calculated hydrodynamic forces are faired by the same combination of independent variables as presented in equation 28 to 30. The dynamic coefficients are not reevaluated based on the new static coefficients; to make it simple the static coefficients from the MTP is just replace by the new “CFD” static coefficients.
The predicted static hydrodynamic derivatives are presented in Table 13.
Simulations were made using both sets of hydrodynamic derivatives presented in Table 11. The main values for 35/-35 degree turning circles and 10/10 and 20/20 starboard and port zigzag manoeuvres are presented in Table 14 and Table 15. The simulation results are plotted in Figure 20 to Figure 23.
Table 13: Predicted hydrodynamic derivatives based (multiplied by 105)
105 MTP CFD
XU -270.9 -249.4 XUU 131.4 141.3 XV -41.1 -66.3 XVV -355.7 -412.7 XD -1.7 -4.7 XDD -125.5 -116.2 XDU -30.0 -15.0 XDDU 268.4 209.4 XVD 173.1 12.5 XVVD -218.0 -303.9 XVDD -119.1 223.8
Y0U -1.5 -11.6 YV -1167.0 -1354.6 YVV 16.9 24.2 YVIVI -2944.7 -2550.3 YVU -163.0 -169.9 YD 310.2 282.8 YDD 17.7 -10.0 YDDD -206.5 -102.3 YDU -397.2 -417.0 YDDU 24.0 157.1 YDDDU 94.0 67.4 YDV 0.0 0.0 YDVV 0.0 0.0 YDIVI 142.4 169.6 YVDD 439.1 -399.5
N0U 3.1 10.1 NV -508.7 -506.6
NVV 4.2 15.1 NVIVI -480.2 -38.2 NVU -244.1 -21.4 ND -156.1 -140.4 NDD -8.3 3.4 NDDD 140.2 94.0 NDU 163.0 194.9 NDDU -16.2 -77.8 NDDDU 86.4 49.5 NDV 0.0 0.0 NDVV 0.0 0.0 NDIVI 130.5 -91.5 NVDD -3.4 235.3
Table 14: MTP simulated manoeuvres.
Port Starboard 10/10 zz 1st OS [deg] 9.3 8.0 10/10 zz 2nd OS [deg] 12.4 13.9 ITA [Lpp] 1.46 1.53 20/20 zz 1st OS [deg] 17.4 17.1 20/20 zz 2nd OS [deg] 16.4 15.6 35 tc advance [Lpp] 2.99 3.24 35 tc tactical diameter [Lpp] 3.47 3.82 35 tc steady drift [deg] -18.6 15.4
Table 15: CFD simulated manoeuvres.
Port Starboard 10/10 zz 1st OS [deg] 7.9 6.9 10/10 zz 2nd OS [deg] 10.3 11.9 ITA [Lpp] 1.57 1.64 20/20 zz 1st OS [deg] 15.3 14.7 20/20 zz 2nd OS [deg] 15.0 15.1 35 tc advance [Lpp] 3.22 3.45 35 tc tactical diameter [Lpp] 3.48 4.05 35 tc steady drift [deg] -15.8 15.1
Figure 20. 35 degree turning circle to port and starboard, where blue is the model with static CFD and
the red is pure MTP.
‐200
0
200
400
600
800
1000
‐1000 ‐500 0 500 1000
Advance [m]
Transfer [m]

29th Symposium on Naval Hydrodynamics Gothenburg, Sweden, 26-31 August 2012
Figure 21. Speed and drift angle in a 35/-35 degree turning circle, where blue is the model with static CFD, red is pure MTP, dashed is -35 deg and solid is 35 deg.
Figure 22. 10/10 port and starboard zigzag, where blue is the model with static CFD and the red is pure MTP.
Figure 23. 20/20 port and starboard zigzag, where blue is the model with static CFD and the red is pure MTP.
The simulations based on the data from CFD
indicate a more course stable ship causing a longer initial turning ability and larger turning circles.
The differences are apparently most severe for the manoeuvres to port side, which might be due to the simple propeller model applied for the CFD calculations. Considering the hydrodynamic derivatives presented in Table 11 these also reveals that the largest deviations are seen among the derivatives dependent on the rudder. Appling a simple propeller model will affect the flow field around the rudder due to the simplification of the flow field from the propeller. Instead of applying a real propeller, the propeller is modeled using an actuator disc. For normal CFD calculations (resistance/self propulsion) this approach seems reasonable since scewness of the model due to the propeller is of minor interest, but when simulation manoeuvres at high drift and rudder angles the port/starboard asymmetry and correspond change of flow field down to the rudder appears to have a larger influence on the manoeuvres than initially assumed as discussed earlier in the CFD result section.
To investigate the influence of asymmetry simulations were made for the CFD predicted model using modified Y0 and N0, applying at first the values from the original pure experimental MTP model and
10
15
20
25
0 200 400
Speed [kn
]
Time [s]
‐20
‐10
0
10
20
0 200 400
Drift angle [deg]
Time [s]
‐30
‐20
‐10
0
10
20
30
0 100 200 300
Head
ing an
d rudder an
gle [deg]
Time [s]
‐30
‐20
‐10
0
10
20
30
0 100 200 300
Head
ing an
d rudder an
gle [deg]
Time [s]
‐60
‐40
‐20
0
20
40
60
0 100 200 300
Head
ing an
d rudder an
gle [deg]
Time [s]
‐60
‐40
‐20
0
20
40
0 100 200 300
Head
ing an
d rudder an
gle [deg]
Time [s]

29th Symposium on Naval Hydrodynamics Gothenburg, Sweden, 26-31 August 2012
afterwards the values from the static CFD calculations. It turned out that when applying the values from pure static numeric calculation, the port starboard asymmetry leveled out even more than previously revealing for example an advance/Lpp of 3.29 to port and 3.37 to starboard against the previous 3.22 and 3.45 respectively, i.e. the model is quite sensitive to the applied values of Y0 and N0. Figure 21 showing the speed and the drift angle during the turning circles also clearly shows that the asymmetry for the CFD model is not as pronounced as for the MTP model. This could be a consequence of the propeller side force, which is missing in the present propeller model. Concluding remarks
In the present work the KCS container ship is investigated during maneuvering by means of EFD and CFD in order to see if CFD results can be used as input for the maneuvering simulator instead of measured data, as this will allow pure numerical evaluation of the ships maneuvering characteristics in the early design phase where no physical scale model is available. The experimental study was conducted in FORCE Technology’s towing tank in Denmark and the CFD study including verification was conducted using the RANS code STAR-CCM+. The experiment covered a 4DOF PMM test, but only 3DOF results were used to simulate the IMO standard maneuvers in this paper. The results from the model test cover the hydrodynamic X-force, Y-force and yaw moment acting on the fully appended ship during the captive PMM motion including experimental uncertainty for selected conditions. Based on a mathematical model of the maneuvering ship, the results from the full test program were first used to simulate the standard IMO maneuvers, i.e. turning circle and 10-10 and 20-20 zig-zag. Afterwards the simulation results were used as basis for a reduction of the test matrix in order to reduce the amount of input data required to get as close as possible to the initial maneuvers. The idea of reducing the test matrix is to reduce the number of CFD computations required to perform the maneuvering simulations with as reasonable accuracy. After reducing the test matrix, all the static conditions in the matrix were computed with the CFD code and the results were compared with the measured data. After ensuring that the results looked reasonable the CFD data were analyzed and fed into the maneuvering simulator by replacing the measured values in the mathematical model and the standard maneuvers were simulated again to see how well the simulated maneuvers based on the reduced experimental test matrix compared with the maneuvers obtained with the CFD based input data.
With respect to the results obtained, the experimental work showed that the experimental uncertainty of the forces and moment for the selected conditions all were within 5.5%, which is comparable to the level obtained in previous PMM measurements with the 5415 frigate and the KVLCC2 tanker. Based on the comparison between standard IMO maneuvers obtained with the full test matrix and a gradually reduced matrix it was possible to reduce the number of static PMM conditions with approximately 30%, while still obtaining reasonable simulation results. It should be noted that the reduction involved experience of the test engineer and it was not done by systematically removing points. The systematic approach is difficult to do since the maneuvering model easily becomes unstable and diverges. Also, it cannot be concluded that removing 30% of the points for all ships will work, as this was only done for one ship.
Concerning the CFD work it was initiated with a verification of the numerical model. It was assumed that the numerical error primarily comes from the discretization so a grid study on 3 systematically refined grids was made. The grid uncertainty was estimated assuming that the hexahedral dominated mesh could be refined systematically in spite of being unstructured in some regions. The verification showed grid uncertainties within 2.5%, which is reasonable. However when doing the validations against measured data, taking the experimental uncertainty into account, the comparison errors became larger than the validation uncertainty leading to validation of X´ alone. However, generally the difference between measurement and computations was quite small giving comparison errors of 5% of the measured value. After computing all the conditions in the reduced test matrix, comparison between measurement and computations was made for all data points and as indicated initially by the verification conditions quite good agreement was generally obtained. There are conditions at higher drift and rudder angles, where differences start to occur, but this may be expected as the flow starts to separate and therefore is more difficult to compute accurately. Further, the simplified and prescribed propeller model also has limitations, as it cannot capture the change in propeller load distribution over the disk as the inflow changes. This for instance happen at large drift angles. Consequently, the rudder, which is located in the propeller slip stream, experiences an inflow that is not correct leading to less accurate rudder loads. However, in spite of the deviations the forces and moments predicted by CFD look promising.
The maneuvering simulations shown in the paper were initially made for the full standard test matrix in order to find reference values for IMO maneuvers. Subsequent reduction of the test matrix showed that the

29th Symposium on Naval Hydrodynamics Gothenburg, Sweden, 26-31 August 2012
number of point in the static part of the matrix could be reduced with approximately 30%, while the dynamic tests all had to be used. The maneuvers with the reduced matrix did not satisfy the predefined tolerance criteria perfectly, but the test program was assumed to be good enough for the study and leaving a reasonable number of conditions for the CFD based PMM test. Swapping the experimental static data with the CFD generated data in the maneuvering simulation gave reasonable results for the final maneuvers, but there were differences. On coefficient level, differences between EFD and CFD were seen for the coefficients related to drift and rudder angles and on the maneuvering level the CFD based model gave a slightly more course stable ship. The differences may be related to the simplified propeller model, which due to the prescribed body-forces does not reflect the actual propeller load distribution over the disk corresponding to changed inflow conditions at for instance drift conditions. This again influences the rudder loads. Further the present model does not include the propeller side force, which also influences the results. However, in spite of the differences the results look encouraging and do indicate that there is a potential for CFD to be used as input generator for the maneuvering simulator, which can be useful in the early design phase where it is not feasible to do the model test.
To round of the conclusion it should be mentioned that the present work focused on computations of the static part of the test matrix. In future work the dynamic conditions should also be computed and applied in the simulator model. Finally it can also be noted the present work is focused on 3DOF simulation, but for a container ship roll typically is important to include in the simulations, which means that a 4DOF model is required. Therefore, in future work it would be relevant to include the fourth degree of freedom in the simulations, even though it will expand the test matrix significantly. Acknowledgements This research is sponsored by FORCE Technology and Office of Naval Research grant N00014-09-1-1055 under the Naval International Cooperative Opportunities in Science and Technology Program (NICOP). References Agdrup K, and Otzen, J. F., “Manoeuvring Prediction Based on a Neural Network Tool for Two Versions of a VLCC Tanker and a Container Ship”, SIMMAN 2008 Workshop on Verification and Validation of Ship Manoeuvering Simulation Methods, April 4-16, 2008, Copenhagen, Denmark.
Benedetti, L., Bouscasse, B., Broglia, R., Fab-bri, L., La Gala, F., and Lugni, C., “PMM Model Test with DDG51 Including Uncertainty Assessment,” INSEAN Report No. 14, 2006. Hochbaum, A. C., Vogt, M. and Gatchell, S.,“Maneuvering Prediction for Two Tankers Based on RANS Simulations”, SIMMAN 2008 Workshop on Verification and Validation of Ship Manoeuvering Simulation Methods, April 4-16, 2008, Copenhagen, Denmark. ITTC, 1999a “Uncertainty Analysis in EFD, Uncertainty Assessment Methodology, 7.5-02-01-01”, 22nd International Towing Tank Conference, Seoul, Korea/Beijing, China. ITTC, 1999b “Uncertainty Analysis, Example for Resistance Test, 7.5-02-02-02”, 22nd International Towing Tank Conference, Seoul, Korea/Beijing, China. Larsen, Nikolaj L. “PMM test and uncertainty assessment for the KCS container ship,” FORCE Technology report No. 109-29227, to be released in 2012 Otzen J. F. and Agdrup K,, “Manoeuvring Prediction Based on PMM Tests for Two Versions of a VLCC Tanker”, SIMMAN 2008 Workshop on Verification and Validation of Ship Manoeuvering Simulation Methods, April 4-16, 2008, Copenhagen, Denmark. Simonsen, C., “PMM Model Test with DDG51 Including Uncertainty Assessment,” Force Technology Report No. ONRII187 01, 2004. Simonsen, C. D. and Stern, F., “RANS Maneuvering Simulation of Esso Osaka with Rudder and a Body-Force propeller”, Journal of Ship Research, Vol. 49 No. 2, 2005. Simonsen, C. D. and Stern, F., “RANS simulation of the flow around the KCS container ship in pure yaw”, SIMMAN 2008 Workshop on Verification and Validation of Ship Manoeuvering Simulation Methods, April 4-16, 2008, Copenhagen, Denmark. Simonsen, C. D. and Stern, F., “Verification and validation of RANS maneuvering simulations of Esso Osaka: effects of drift and rudder angle on the forces and moments”, Computers & Fluids, Vol. 32, No. 10, 2003.

29th Symposium on Naval Hydrodynamics Gothenburg, Sweden, 26-31 August 2012
Simonsen, C. D., Stern, F. and Agdrup, K., “CFD with PMM test validation for manoeuvring VLCC2 tanker in deep and shallow water”, MARSIM 2006, June 25-30, 2006, Terschelling, the Netherlands. STAR-CCM+ user guide, 2012 Stern, F., Wilson, R.V., Coleman, H.V. and Paterson, E.G., “Comprehensive approach to verification and validation of CFD simulations-Part 1: methodology and procedures,” ASME J Fluids Engineering, 2001; 124(4): 793-802. Wilson, R., Shao, J. and Stern, F., “Discussion: Criticism of the “Correction Factor” Verification Method,” ASME J Fluids Engineering, 2004; 126:704-706. Yoon, H.-S., 2009. “Phase-Averaged Stereo-PIV flow field and Force/Moment Measurements for Surface Combatant in PMM Maneuvres,” Phd. Thesis, IIHR, University of Iowa, 2009.