Lösningsmanual till utvalda lektionsuppgifter i … (MI) Stefan Lindström [email protected]...
50
Lösningsmanual till utvalda lektionsuppgifter i Mekanik (MI) Stefan Lindström [email protected] VT 2013 1
Transcript of Lösningsmanual till utvalda lektionsuppgifter i … (MI) Stefan Lindström [email protected]...

Lösningsmanual till utvalda lektionsuppgifter i
Mekanik (MI)
Stefan Lindström
VT 2013
1

Uppgift 2/7: Statik/kraftsystem
Tre balkar är sammanskarvade enligt figuren. Beräkna storleken R avkraftresultanten R för de två givna krafterna, samt vinkeln θ mellan re-sultanten och den positiva x-axeln.
j
i
F1y
F2x OO
γβ
F1x
F2y
x
F 2F 2
F 1
F 1
Det är givet att F1 = 3 kN, F2 = 2 kN, β = 60 och γ = 30.
Komposantuppdelning
Beräkna komponenterna för F 1.
F1x = −F1 cos β = −12F1
F1y = −F1 sin β = −√
32 F1
Beräkna komponenterna för F 2.
F2x = −F2 cos γ = −√
32 F2
F2y = +F2 sin γ = 12F2
Beräkning av resultant
Beräkna komponenterna för resultanten R = F 1 + F 2.
Rx = F1x + F2x = −12F1 −
√3
2 F2
Ry = F1y + F2y = −√
32 F1 + 1
2F2
Detta gerR = Rxi + Ryj = −3232i − 1598j N.
Bestäm resultantens storlek R och vinkel θ mot x-axeln:
R =√
R2x + R2
y ≈ 3606 N
θ = arctanRy
Rx+ 180n ≈ 26.3 + 180n
där n = 1, då R befinner sig i tredje kvadranten.
Svar
R ≈ 3606 N, θ ≈ 206
2

Uppgift 2/53: Statik/kraftsystem och moment
I toppen av en mast sitter en infästning enligt bilden. Bestäm storleken avspännkraften T så att momentet kring punkten O blir noll.
25
j
i
γO
Ty
Fx
β
Cb
ℓd
Tx
Fy TF
Det är givet att F = 5 kN, β = 30, b = 60 mm, d = 90 mm och ℓ = 120 mm.
Komposantuppdelning
Beräkna komponenterna för F .
Fx = −F sin β = −12F
Fy = −F cos β = −√
32 F
Beräkna komponenterna för T .
Tx = +T sin γ = se ruta = 2√29
T
Ty = −T cos γ = se ruta = − 5√29
T
5
2h
γ
h =√
22 + 52 =√
29sin γ = 2
h = 2√29
, cos γ = 5h = 5√
29
Beräkning av moment
Momentsumma kring punkten O moturs
x
MO= b|Fx| + d|Fy| − b|Tx| − ℓ|Ty| ⇒
0 =1
2bF +
√3
2dF − 2√
29bT − 5√
29ℓT ⇔
(2√29
b +5√29
ℓ
)
T =
(
1
2b +
√3
2d
)
F ⇔
T =12b +
√3
2 d2√29
b + 5√29
ℓF =
12
(
b +√
3d)
1√29
(2b + 2ℓ)F =
√29
2· b +
√3d
2b + 5ℓF
Svar
T = 4.04 kN
3

Uppgift 2/93: Statik/kraftsystem och moment
Två sammanfogade trissor belastas av krafter enligt figuren. Bestäm snörkraftens
belopp T så att momentetx
MO kring punkten O blir noll. Bestäm resultan-ten Rs storlek och vinkel θ mot x-axeln.
j
i
F 3
F 2
F 1
RT
βb
r
O
Det är givet att F1 = 200 N, F2 = 150 N, F3 = 160 N, β = 30, r = 200 mmoch b = 100 mm.
Komposantuppdelning
Beräkna komponenterna för F 3 och T :
F3x = −F3 cos β = −√
32 F3
F3y = F3 sin β = 12F3
Tx = −T cos β = −√
32 T
Ty = T sin β = 12T
Beräkning av moment
I fallet med ett snöre runt en trissa är trissans radie momentarmen. Vi fårx
MO= −rF1 + rF2 + bF3 − bT ⇔ bT = bF3 + r(F2 − F1) ⇔
T = F3 +r
b(F2 − F1) = 60 N.
Beräkning av resultant
Resultanten Rs komposanter blir
Rx = F1x + F2x + F3x + Tx = F1 + F2 −√
32 F3 −
√3
2 T = 159.5 NRy = F1y + F2y + F3y + Ty = 1
2F3 + 12T = 110 N.
Resultatntens storlek och vinkel ges av
R =√
R2x + R2
y = 193.7 N
θ = arctanRy
Rx= 34.60.
Svar
T = 60 N, R = 193.7 N, θ = 34.6
4

Uppgift 3/41: Statik/friläggning och jämvikt
Bilden visar ett enmotorigt propellerplan plan med massan m. Propellernutövar en dragkraft T . Hjulen vid punkten B är bromsade. Hjulet vid A ärobromsat. Beräkna den procentuella förändringen hos normalkrafterna vidpunkterna A respektive B, när motorns dragkraft ändras från T = 0 N tillT = 3000 N.
j
i
ℓ b
h
A B
β
T
G
Tx
Ty
β
G
Ay
T
mg
By
Bx
Det är givet att β = 12, ℓ = 4 m, b = 0.8 m, h = 1.4 m och m = 1800 kg.Tyngdaccelerationen antas vara g = 9.81 m/s2.
Komposantuppdelning
Beräkna komponenterna för T :
Tx = T cos βTy = T sin β.
Vi vet ingenting om riktningen hos kraften B och utför därför inte kom-posantuppdelning för denna.
Jämviktsekvationer
Kraftjämvikt,∑
Fx = 0,∑
Fy = 0:
→: −Bx + T cos β = 0 (1a)
↑: Ay + By + T sin β − mg = 0 (1b)
Momentjämvikt kring G medurs ger
ℓAy + hBx − bBy = 0 (2)
5

Beräkningar
Omskrivning av ekv. (1a) respektive (1b) ger
Bx = T cos β
By = mg − Ay − T sin β.
Insättning i ekv. (2) ger då
ℓAy + hT cos β − b (mg − Ay − T sin β) = 0 ⇔
ℓAy + hT cos β − bmg + bAy + bT sin β = 0 ⇔(ℓ + b)Ay = −hT cos β + bmg − bT sin β ⇔
Ay =b
ℓ + bmg − h cos β + b sin β
ℓ + bT.
Insättning av A i uttrycket för By ger
By = mg − Ay − T sin β
= mg − b
ℓ + bmg +
h cos β + b sin β
ℓ + bT − T sin β = · · ·
=ℓ
ℓ + bmg +
(h cos β − ℓ sin β
ℓ + b
)
T.
Uttryck för normalkrafterna Ay och By har nu beräknats så att deres pro-centuella förändring kan bestämmas:
Ay(T = 0 N) = 2943.0 N, Ay(T = 3000 N) = 1983.2 N
By(T = 0 N) = 14715.0 N, By(T = 3000 N) = 15051.1 N
Svar
Normalkraften Ay minskar med 32.5 %, medan normalkraften By ökar med2.28 %.
6

Uppgift 4/67: Statik/sammansatta konstruktioner
Bestäm kraften i balken BD och kraften som verkar på var och en av nitarnavid A, B respektive C.
j
i
ℓℓ
B
A
D
FF
C
A
BxB
By B
C
β
AAy
Ax
−BD
B
D
γ
γ
Det är givet att F = 2.5 kN, β = 15, γ = 45 och att ℓ = 0.8 m.
Komposantuppdelning
Beräkna komponenterna för B
Bx = B cos γ = 1√2B
By = B sin γ = 1√2B.
Här använde vi att kraften B måste vara riktad längs balken BDs axel.Detta gäller för att balkens båda ändar är infästa med gångjärnsleder.
Jämviktsekvationer
Kraftjämvikt,∑
Fx = 0,∑
Fy = 0 för balken AC
→: Ax +1√2
B = 0 (1a)
↑: Ay +1√2
B − F = 0 (1b)
Momentjämvikt kring A moturs för balken AC ger
−(ℓ sin β)Bx + (ℓ cos β)By − (2ℓ cos β)F = 0 (2)
Kraftjämvikt för balken BD ger att D = B och därmed att D = B.
Beräkningar
Insättning i ekv. (2) ger
− 1√2
ℓB sin β +1√2
ℓB cos β − 2ℓF cos β = 0 ⇔
1√2
B(cos β − sin β) = 2F cos β.
7

Enligt tabell gäller att sin 15 = 14(
√6−
√2) samt att cos 15 = 1
4(√
6+√
2)ger
1√2
B
(1
4(√
6 +√
2) − 1
4(√
6 −√
2)
)
= 2F1
4(√
6 +√
2) ⇔
1√2
B(2√
2) = 2F (√
6 +√
2) ⇔
B = D = (√
6 +√
2)F.
Insättning av B i ekv. (1a) och (1b) ger
Ax = − 1√2
B = −(√
3 + 1)F
Ay = − 1√2
B + F = −(√
3 + 1)F + F = −√
3F.
så att
A =√
A2x + A2
y =
√
(√
3 + 1)2 +√
32
F =
√
7 + 2√
3 F.
Svar
Kraften i balken BD är B = D = 9.66 kN. Krafterna vid knutpunkterna ärA = 8.09 kN samt B = D = 9.66 kN.
8

Uppgift 4/103: Statik/sammansatta konstruktioner
Figuren visar an avdragare som monterats mot ett drivhjul. Drivhjuletlossnar från sin axel då P = 1.2 kN. Krafterna mot ställskruvarna är horison-
tella. Bestäm beloppet av kraften vid A.
j
i
ℓ
b
b
d
P
[2]
[1]
C
C
C
−C
B
D
A
C
Det är givet att b = 60 mm, d = 15 mm och att ℓ = 90 mm. I friläggningenhar vi använt att stången BC är upphängd i två gångjärnsleder, så att etttvåkraftsystem verkar på stången.
Komposantuppdelning
Px = 0Py = P
Cx = 1√2C
Cy = − 1√2C
Dx = −DDy = 0
Jämviktsekvationer
Kraftjämvikt, kropp [1]:
↑: Py + 2Cy = 0 ⇔ P − 2√2
C = 0 ⇔ C =1√2
P.
Kraftjämvikt, kropp [3]:
↑: −Cy + Ay = 0 ⇔ 1√2
C + Ay = 0 ⇔ Ay = − 1√2
C = −1
2P.
Momentjämvikt, kropp [3]:
y
D:1√2
bC + dAy − (b + ℓ)Ax = 0 ⇔ 1
2bP − 1
2dP − (b + ℓ)Ax = 0 ⇔
(b + ℓ)Ax =1
2P (b − d) ⇔ Ax =
b − d
2(b + ℓ)P
9

Beräkningar
Kraftens belopp beräknas enligt
A =√
A2x + A2
y =
√(
b − d
2(b + ℓ)P
)2
+1
4P 2 =
P
2
√(
b − d
b + ℓ
)2
+ 1.
Svar
A = 0.626 kN.
10

Uppgift 6/5: Statik/friktion
Ett rätblock med massan m hålls på plats mot en vägg. Den statiska frik-tionskoefficienten mellan vägg och block µs är känd, liksom den kinetiskafriktionskoefficienten µk. Bestäm friktionskraften F , som verkar på rät-blocket vid väggen, om a) θ = 15 och b) θ = 30.
j
i
θ
P
Px
FP
mg
m Py
N
Det är givet att P = 500 N, m = 45 kg, µs = 0.5 och µk = 0.4. Tyngdaccel-erationen antas vara g = 9.81 m/s2.
Komposantuppdelning
Px = −P cos θPy = P sin θ
Fx = 0Fy = F
Nx = NNy = 0
Jämviktsekvationer
Kraftjämvikt,∑
Fx = 0,∑
Fy = 0
→: −P cos θ + N = 0 (1a)
↑: P sin θ + F − mg = 0 (1b)
Beräkningar
Vi kan bryta ut F och N direkt ur ekv. (1a) och (1b):
F = mg − P sin θ, N = P cos θ. (2)
Vi måste kontrollera att rätblocket inte glider. Villkoret för detta är:
−µs <F
N< µs. (3)
Fall a: θ = 15. Insättning av givna värden i (2) ger
F = 312.0 N, N = 483.0 N, ⇒ F/N = 0.646.
I fallet θ = 15 uppfylls ej villkor (3), så att rätblocket börjar glida. Därmedexisterar ingen jämvikt i uppåtriktningen och ekv. (1b) upphör att gälla. Vi
11

måste förkasta alla tidigare beräkningar och använda det kinetiska friktion-ssambandet:
→: −P cos θ + N = 0 (4a)
friktion : F = µkN (4b)
Lösning av detta ekvationssystem ger
F = 193.2 N, N = 483.0 N.
Fall b: θ = 30. Insättning av givna värden i (2) ger
F = 191.4 N, N = 433.0 N, ⇒ F/N = 0.442.
I fallet θ = 30 är villkor (3) uppfyllt. Den beräknade friktionskraften äralltså korrekt.
Svar
a) F = 193.2j N, b) F = 191.4j N
12

0.1 Uppgift 6/44: Statik/friktion
En person med massan m1 stiger uppför en stege med massan m2 och läng-den ℓ. Den statiska friktionskoefficienten µs mellan golvet och stegen ärkänd. Beräkna största sträckan s som personen kan röra sig längs stegeninnan den börjar glida vid A.
xy
N
B
m1g
µsN
m2g
B
m1
g
s
bd
ℓ,m2 √ℓ2 − b2
A
Det är givet att m1 = 90 kg, m2 = 15 kg, µs = 0.25, ℓ = 4.0 m och b = 1.5 m.Tyngdaccelerationen antas vara g = 9.81 m/s2. Eftersom vi undersökergränsfallet för statisk friktion gäller att friktionskraften är µsN .
Jämviktsekvationer
Kraftjämvikt,∑
Fx = 0,∑
Fy = 0
→: µsN − B = 0 (1a)
↑: N − m1g − m2g = 0 (1b)
Momentjämvikt kring A medurs ger
y
A: dm1g +1
2bm2g −
√
ℓ2 − b2B = 0. (2)
Beräkningar
Ekvation (2a) ger N = (m1 + m2)g och vidare insättning i ekv. (1) ger B =µs(m1 + m2)g. Likformiga trianglar medför att
ℓ
b=
s
d⇔ d =
sb
ℓ.
13

Allt detta sättes in i ekv. (2b) för att ge
sb
ℓm1g +
1
2bm2g −
√
ℓ2 − b2µs(m1 + m2)g = 0 ⇔
s = ℓ
µsm1 + m2
m1
√
ℓ2
b2− 1 − m2
2m1
= 2.55074 . . . m.
Svar
Största möjliga sträcka är s = 2.55 m.
14

Uppgift 6/54: Statik/kilar
En dörr med massan m stöds mot en kil med kilvinkel α vid ena hörnetoch ligger an mot en kant vid det andra hörnet, så att dörren inte förskjutsi sidled då man driver in kilen. Den statiska friktionskoefficienten mellankilen och dörren, samt mellan kilen och underlaget, är µs. Bestäm vilkenhorisontell kraft P som måste appliceras på kilen för att lyfta dörren.
j
i
P
m
ℓ b
A
mg
A
NA
µsN
µsN
N ′
N
µsN′
α
G
P
Eftersom kilen precis är på väg att börja glida gäller att friktionskrafternaär µsN respektive µsN
′ . Det är givet att m = 100 kg, α = 5, µs = 0.6,ℓ = 1.2 m och b = 1.0 m. Tyngdaccelerationen antas vara g = 9.81 m/s2.
Jämviktsekvationer
Momentjämvikt för dörren, vi antar att dörrens vinkel mot golvet är för-sumbar
y
A: mgℓ + µsN(ℓ + b) sin α − N(ℓ + b) cos α = 0 (1)
Kraftjämvikt för kilen
→: −P + µsN cos α + N sin α + µsN′ = 0 (2a)
↑: µsN sin α − N cos α + N ′ = 0 (2b)
Beräkningar
Ekv. (2b) gerN ′ = N(cos α − µs sin α).
Vidare ger ekv. (1) att
N = mgℓ
ℓ + b(cos α − µs sin α)−1.
15

Således får vi ur ekv. (2a) att
P = N(µs cos α + sin α) + µsN′
= N(µs cos α + sin α) + µsN(cos α − µs sin α)
= N(
2µs cos α + (1 − µ2s ) sin α
)
= mgℓ
ℓ + b
2µs cos α + (1 − µ2s ) sin α
cos α − µs sin α.
Svar
P = −709.3i N
16

Uppgift 6/93: Statik/remfriktion
Bestäm den kinetiska friktionskoefficienten µk mellan snöret och axeln (skug-gad cirkelskiva) så att cylindrarna i bilder rör sig med jämn fart.
j
i
m10
m
mg
1
10mg
N
M
Remfriktion
Enligt formel (6/7) s. 381 i Statics (Meriam) gäller
T2 = T1eµkβ , (1)
där T2 är den större remkraften, T1 är den mindre remkraften och β ärbälteskontaktens totala vinkel givet i radianer.
I det aktuella fallet har vi
T2 = mg, T1 =mg
10, β =
3
2· 2π = 3π,
där βs värde motsvarar ett och ett halvt varvs bälteskontakt.
Beräkningar
Insättning av kända värden i ekv. (1) ger
mg =1
10mge3πµk ⇔ e3πµk = 10 ⇔ 3πµk = ln 10 ⇔ µk =
ln 10
3π.
Svar
µk = 0.244
17

Uppgift 5/16: Statik/geometriskt centrum
Bestäm det geometriska centrumet G:s läge (xG, yG) för den skuggade ytan.
b
b
y
xy = kx2
G
y
x
dx
yc ℓ
xc
Notera att linjen y = kx2 tangerar punkten (b, b). Således gäller att b =kb2 ⇔ k = 1/b.
Ytelement
I detta fall använder vi ett vertikalt ytelementet för att beräkna arean.Elementets längd är
ℓ = b − kx2 = b − x2/b.
Det skuggade ytementets area blir
dA = ℓdx,
och dess geometriska centrum kan uttryckas som
xc = x
yc =1
2
(
kx2 + b)
=x2
2b+
b
2
Områdets area
Hela föremålets area ges av
A =
∫
dA =
∫ b
0ℓdx =
∫ b
0b − 1
bx2dx =
[
bx − 1
3bx3]b
0= b2 − 1
3b2 =
2
3b2.
Koordinater för geometriskt centrum
Definitinen för geometriskt centrum ger
xG =1
A
∫
xcdA =1
A
∫ b
0xℓdx =
1
A
∫ b
0bx − 1
bx3dx
=3
2b2
[b
2x2 − 1
4bx4]b
0=
3
2b2
(1
2b3 − 1
4b3)
=3
8b.
18

På samma sätt får vi
yG =1
A
∫
yc dA︸︷︷︸
=ℓdx
=1
A
∫ b
0
(
x2
2b+
b
2
)(
b − x2
b
)
dx
=1
A
∫ b
0
b2
2− x4
2b2dx =
1
A
[
b2x
2− x5
10b2
]b
0
=b3
A
(1
2− 1
10
)
=3b3
2b2
(5
10− 1
10
)
=3
2
4
10b =
3
5b.
Svar
xG =3
8b, yG =
3
5b
19

Uppgift 5/49: Statik/geometriskt centrum
Bestäm geometriska centrumet Gs läge (XG, YG) för den skuggade ytan.
y
x
h
hh
h/2G
Uppdelning i delytor
Den skuggade ytan kan delas in i två enklare ytor: en triangel (yta 1) ochen halvcirkel (yta 2):
[1] [2]
Koordinater för geometriskt centrum
Det geometriska centrumets läge bestäms genom att slå upp delytornas ge-ometriska centra i tabellverk. Notera att areorna för ytor man skär bort fårminustecken i tabellen.
Del Ai xGi yGi xGiAi yGiAi
i = 1 h2 0 h/3 0 h3/3i = 2 −πh2/8 0 2h/3π 0 −h3/12
Summa (1 − π/8)h2 0 h3/4
Koordinaterna beräknas nu enligt formeln
XG =
∑
i xGiAi∑
Ai= 0, YG =
∑
i yGiAi∑
Ai=
h3
4(1 − π
8
)h2
=2
8 − πh
Svar
XG = 0, YG =2
8 − πh
20

Uppgift 2/10: Dynamik/rätlinjig rörelse
Ett föremål kastas från randen av ett ℓ = 60 m högt stup, rakt upp i skynmed farten v0 = 30 m/s. (a) Bestäm föremålets maximala höjd h räknat frånstupets kant. (b) Bestäm tiden τ som förflyter mellan kastet och ögenblicketdå föremålet når marken.
g
A
h
ℓ
B
C
s
Luftmotståndet antas vara försumbart. Tyngdaccelerationen antas vara g =9.81 m/s2.
Fysikaliskt samband
Under rörelsen är accelerationen i s-riktningen
a = −g. (1)
Maximal höjd
Betrakta rörelsen från A till banans högsta punkt B. Starttillståndet re-spektive sluttillstånd ges av
s = 0v = v0
s = hv = 0
där v betecknar hastigheten i s-riktningen. Vi känner till rörelsens start-och sluttillståd. Detta kallas ett randvärdesproblem.
Vi får
vdv = ads ⇔ vdv = −gds ⇔∫ 0
v0
v dv = −g
∫ h
0ds ⇔
[1
2v2]0
v0
= −g [s]h0 ⇔ 0 − 1
2v2
0 = −g(h − 0) ⇔ h =v2
0
2g.
21

Tid för kastet
Betrakta rörelsen från A till banans lägsta punkt C. Starttillståndet ges av
t = 0, s = 0, v = v0.
Vi vet dock inte vilket sluttillståndet är (hastighet okänd). Detta är ettbegynnelsevärdesproblem.
Först bestämmer vi v(t) genom
dv = adt ⇔ dv = −gdt ⇔∫ v(t)
v0
dv = −g
∫ t
0dt ⇔
v(t) − v0 = −gt ⇔ v(t) = v0 − gt.
Därefter kan vi bestämma s(t) genom att använda
ds = vdt ⇔∫ s(t)
0ds =
∫ t
0(v0 − gt) dt ⇔
s(t) − 0 =
[
v0t − 1
2gt2]t
0⇔ s(t) = v0t − 1
2gt2.
Vid nedslaget gäller att s(τ) = −ℓ, ger
v0τ − 1
2gτ2 = −ℓ ⇔ τ2 − 2v0
gt − 2ℓ
g= 0 ⇔
τ =v0
g±√
v20
g2+
2ℓ
g=
v0
g
(
1 ±√
1 +2gℓ
v20
)
,
av vilka endast en lösning är positiv.
Svar
h = 45.9 m, τ = 7.70 s
22

Uppgift 2/41: Dynamik/rätlinjig rörelse
Luftmotståndet gör att en bil, som får rulla fritt, accelereras i rörelserik-tningen med a = −C1 − C2v2, där C1 > 0 och C2 > 0 är konstanteroch v är farten. Hur lång sträcka D rullar bilen efter att ha stängts avvid farten v = v0?
v0
s
Fysikaliskt samband
Det är givet atta = −C1 − C2v2. (1)
Rörelse i s-riktningen
Starttillståndet respektive sluttillstånd ges av
s = 0v = v0
s = Dv = 0
där v betecknar hastigheten i s-riktningen. Vi har alltså ett randvärdesprob-lem. Vi får
vdv = ads ⇔ vdv = (−C1 − C2v2)ds ⇔
− vdv
C1 + C2v2= ds ⇔ −
∫ 0
v0
v
C1 + C2v2dv =
∫ D
0ds ⇔
D =
∫ v0
0
vdv
C1 + C2v2=
u = C1 + C2v2, du = 2C2vdvu0 = C1, u1 = C1 + C2v2
0
=
∫ C1+C2v2
0
C1
12C2
du
u=
1
2C2
[
ln |u|]C1+C2v2
0
C1
=1
2C2
(
ln(C1 + C2v20) − ln C1
)
=1
2C2ln
C1 + C2v20
C1
Svar
D =1
2C2ln
(
1 +C2
C1v2
0
)
23

Uppgift 2/72: Dynamik/kroklinjig rörelse
Vilken är den minsta farten u man måste kasta en sten horisontellt frånklippkanten A i figuren, för att stenen nätt och jämnt ska ta sig över hin-dret B?
g
u
B
A
h
ℓy
x
Det är givet att ℓ = 40 m och att h = 10 m. Tyngdaccelerationen antas varag = 9.81 m/s2 och luftmotståndet antas vara försumbart.
Fysikaliskt samband
Det är givet attax = 0, ay = −g. (1)
Rörelse i x-riktningen
Betrakta rörelsen från A till banans lägsta punkt B. Starttillståndet ges av
t = 0, x = 0, vx = u.
Först bestämmer vi vx(t) genom
dvx = axdt ⇔∫ vx(t)
udvx =
∫ t
00 dt ⇔ vx(t) − u = 0 ⇔ vx(t) = u.
Sedan bestämmer vi x(t) genom
dx = vxdt ⇔∫ x(t)
0dx =
∫ t
0u dt ⇔ x(t) − 0 = ut ⇔ x(t) = ut.
Rörelse i y-riktningen
Betrakta rörelsen från A till banans lägsta punkt B. Starttillståndet ges av
t = 0, y = 0, vy = 0.
Först bestämmer vi vy(t) genom
dvy = aydt ⇔∫ vy(t)
0dvy = −g
∫ t
0dt ⇔ vy(t) − 0 = −gt ⇔ vy(t) = −gt.
24

Sedan bestämmer vi y(t) genom
dy = vydt ⇔∫ y(t)
0dy =
∫ t
0−gt dt ⇔ y(t)−0 = −1
2gt2 ⇔ y(t) = −1
2gt2.
Randvillkor
Vi vet att det i punkten B ska gälla att
x(t) = ℓy(t) = −h
⇔
ut = ℓ−1
2gt2 = −h⇒
u = ℓ
t
t =√
2hg
⇔
u = ℓ
√g
2h.
Svar
u = 28.0 m/s
25

Uppgift 2/131: Dynamik/kroklinjig rörelse/naturliga kompo-nenter
En bil framförs med farten vA på en raksträcka. Föraren börjar bromsabilen vid A och slutar bromsa vid C. Inbromsningen sker med konstant ac-celeration. Efter punkten C är bilens fart vC . Bestäm den accelerationen ~aB
som verkar på bilen vid punkten B efter ingången i kurvan.
A BC
ℓ ℓ
ρs
Det är givet att vA = 250 km/h, vC = 200 km/h, ℓ = 150 m och att vägenskrökningsradie är ρ = 500 m.
Bestäm accelerationen
Betrakta rörelsen från A till C. I banans tangentriktning (t-riktningen), detvill säga längs den sträckade linjen, gäller differentialsambanden för rätlinjigrörelse. Starttillstånd och sluttillstånd ges av
s = 0v = vA
s = 2ℓv = vC
Med at constant får vi
vdv = atds ⇔∫ vC
vA
vdv =
∫ 2ℓ
0atds ⇔
[
v2
2
]vC
vA
= at [s]2ℓ0 ⇔
v2C
2− v2
A
2= 2ℓat ⇔ at =
v2C − v2
A
4ℓ.
Bestäm farten
Vi vill beräkna farten vid B för att kunna bestämma accelerationen an in-riktningen vid B. Vi betraktar rörelsen från A till B:
vdv = atds ⇔∫ vB
vA
vdv =
∫ ℓ
0atds ⇔
[
v2
2
]vB
vA
= at [s]ℓ0 ⇔
v2B
2− v2
A
2= ℓat =
v2C
4− v2
A4 ⇔ vB =
√
v2C
2+
v2A
2.
26

Bestäm total acceleration
Vi har att
aBn =v2
B
ρ=
v2C + v2
A
2ρ.
Den titala accelrationen vid B ges av Pythagoras sats
aB =√
a2t + a2
Bn
Svar
aB = 8.42 m/s2
27

Uppgift 2/147: Dynamik/polära koordinater
En raket färdas genom atmosfären och spåras av en radarstation. Raketenshastighet v och acceleration a är riktade rakt uppåt. Radarn har vinkeln θmot markytan och avståndet från radarn till raketen är r. Beräkna v och a.
θθ
θ
y
x
r
eθ
y
x
r
v
a
er
Det är givet att r = 9 km, r = 21 m/s2, θ = 60 och att θ = 0.02 rad/s.
Vektorrepresentation
Hastighet och acceleration uttrycks i polära koordinater
vr = v sin θvθ = v cos θ
ar = a sin θaθ = a cos θ
Kinematiska samband
För polära koordinater gäller [ekv. 2/13,14, Dynamics, Meriam]
vr = r
vθ = rθ
ar = r − rθ2
aθ = rθ + 2rθ
Beräkningar
Kombinera formlerna för kinematiska samband och vektorrepresentation.
vθ : v cos θ = rθ ⇔ v =rθ
cos θ
ar : a sin θ = r − rθ2 ⇔ a =r − rθ2
sin θ
Svar
v = 360 m/s, a = 20.1 m/s2
28

Uppgift 3/3: Dynamik/rörelseekvationer/rätlinjig rörelse
I ett visst ögonblick rör sig en låda med hastigheten v0 uppför en lutningmed lutningsvinkeln β. Bestäm tiden τ som förflyter innan lådan stannarupp. Bestäm också sträckan d den hinner färdas.
y
x
v0
F
N
mg
mg sinβ
mg cosβ
β
µk
Det är givet att lådans massa är m = 40 kg, den kinetiska friktionskoeffi-cienten är µk = 0.25, att β = 20 och att v0 = 10 m/s.
Rörelseekvationer
Eftersom ay = 0 ges rörelseekvationerna i x- och y-led av
ց: F + mg sin β = max (1a)
ր: N − mg cos β = 0 (1b)
Lådan rör sig, varför det kinetiska friktionssambandet ska användas
F = µkN (2)
Insättning av ekv. (2) i ekv. (1b) ger F = mgµk cos β, vilket kan sättas in iekv. (1a):
mgµk cos β + mg sin β = max ⇔ ax = g(sin β + µk cos β).
Rörelse i x-led
Starttillstånd respektive sluttillstånd för rörelsen ges av
t = 0x = 0vx = −v0
t = τx = −dvx = 0
För att beräkna tiden τ då lådan stannar använder vi
dvx = axdt ⇔ dvx = g(sin β + µk cos β)dt ⇔∫ 0
−v0dvx =
∫ τ
0g(sin β + µk cos β)dt ⇔
29

[vx]0−v0 = g(sin β + µk cos β) [t]τ0 ⇔ · · · ⇔ τ =v0
g(sin β + µk cos β).
För att beräkna sträckan använder vi
vxdvx = axdx ⇔ vxdvx = g(sin β + µk cos β)dx ⇔∫ 0
−v0
vxdvx =
∫ −d
0g(sin β + µk cos β)dx ⇔
[1
2v2
x
]0
−v0
= g(sin β+µk cos β) [x]−d0 ⇔ · · · ⇔ d =
v20
2g(sin β + µk cos β).
Svar
τ = 1.767 s, d = 8.834 m
30

Uppgift 3/78: Dynamik/rörelseekvationer/kroklinjig rörelse
Ett föremål med massan m har placerats på en konisk roterande skiva enligtfiguren. Bestäm den maximala konstanta vinkelhastigheten ω hos skivan,utan att föremålet trillar av, då den statiska friktionskoefficienten är µs.
ω
mg
y
n
N
F
gρ
µs
β
Det är givet att β = 30, µs = 0.8 och att ρ = 0.2 m. Tyngdaccelerationenantas vara g = 9.81 m/s2.
Kinematiska samband
För naturliga koordinater gäller [ekv. 2/10, Dynamics, Meriam]
an = ρω2 (1)
Dessutom gäller det att ay = 0, eftersom inger rörelse sker i y-led.
Rörelseekvationer
Genom att utnyttja ekv. (1) och att ay = 0 får vi
→: F cos β − N sin β = man = mρω2 (2a)
↑: N cos β + F sin β − mg = may = 0 (2b)
Friktionssamband
Föremålet är precis på gränsen till att börja glida. Då gäller
F = µsN (3)
Beräkningar
Genom att sätt in ekv. (3) i ekv. (2b) får vi
N cos β + µsN sin β − mg = 0 ⇔ N =mg
cos β + µs sin β.
31

Uttrycken för N och F sätts in i ekv. (2a), vilket ger
N(µs cos β − sin β) = mρω2 ⇔ mgµs cos β − sin β
cos β + µs sin β= mρω2 ⇔
ω =
√
g
ρ· µs cos β − sin β
cos β + µs sin β.
Svar
ω = 2.73 rad/s
32

Uppgift 3/89: Dynamik/rörelseekvationer/kroklinjig rörelse
En liten, cylindrisk skyttel med massa m glider friktionsfritt genom ettrör med längden L. Röret roterar i horisontalplanet kring sin ena ändemed vinkelhastigheten Ω. Cylindern startar vid r = r0 med den radiellafarten r0. Bestäm storleken hos den horisontella kraften N1 på cylindernvid det ögonblick den lämnar röret.
θ
y
x
eθ
r
er
L
N
Ω
Det är givet att m = 0.180 kg, L = 1.0 m, r0 = 0.150 m, r0 = 20 m/s ochΩ = 7 rad/s.
Kinematiska samband
För polära koordinater gäller [ekv. 2/14, Dynamics, Meriam]
ar = r − rθ2 = r − rΩ2
aθ = rθ + 2rθ = 2rΩ
Rörelseekvationer
Rörelseekvationerna i r- respektive θ-riktningen ger
er : 0 = mar ⇔ r = rΩ2 (1a)
eθ : N = maθ = 2mrΩ (1b)
här utnyttjade vi också de kinematiska sambanden.
Rörelse i r-riktningen
Vi tänker oss nu att röret ligger fixt, och att skytteln rör sig genom röret medhastigheten r och accellerationen r. Betrakta rörelse från startögonblicket(index 0) till det ögonblick då föremålet lämnar röret (index 1). Start-respektive sluttillstånd ges av
r = r0
r = r0
r = Lr = r1,
33

där r1 är obekant. Enligt differentialen vdv = ads, och genom att sätta inr = rΩ2 från ekv. (1a) får vi
rdr = rdr ⇔ rdr = Ω2rdr ⇔∫ r1
r0
rdr = Ω2∫ L
r0
rdr ⇔[
1
2r2]r1
r0
= Ω2[
1
2r2]L
r0
⇔
1
2
(
r21 − r2
0
)
=1
2Ω2(
L2 − r20
)
⇔ r1 =√
r20 + Ω2
(L2 − r2
0
).
Beräkningar
Normalkraften N1 vid ögonblick då föremålet lämnar röret erhålles genomatt sätt in uttrycket för r1 i ekv. (1b):
N1 = 2mΩr1 = 2mΩ√
r20 + Ω2
(L2 − r2
0
).
Svar
Normalkraften vid ögonblick då föremålet lämnar röret är N1 = 53.3 N.
34

Uppgift 3/127: Dynamik/arbete och energi
Ett raketdrivet fordon med massan m startar från vila vid A. Dess mo-tor utvecklar kraften T i rörelseriktningen från A till B. Bestäm hur långsträcka s den därefter rullar uppför backen, där den stannar vid C.
A
C
B
s
β
R
x
y
g
Det är givet att m = 100 kg, R = 120 m, β = 30 och T = 1.5 kN. Tyngdac-celerationen antas vara g = 9.81 m/s2.
Energi vid A
Potentiell respektive kinetisk energi är vid A:
VgA = mgyA = −mg(R − R cos β), TA =1
2mv2
A = 0
Arbete mellan A och C
Endast motorns kraft ska räknas som arbete på bilen. Gravitationen utförockså ett arbete, men det tar man hänsyn till genom att använda potentiellenergi.
U ′AC = U ′
AB = TβR. (1)
Här använde vi att βR är sträckan mellan A och B.
Energi vid C
Potentiell respektive kinetisk energi är vid C:
VgC = mgyC = mgs sin β, TC =1
2mv2
C = 0
Energisamband
Arbete och energisatsen ger
VgA + TA + U ′AC = VgC + TC ⇔
35

−mgR(1 − cos β) + TβR = mgs sin β ⇔TβR
mg− R(1 − cos β) = s sin β ⇔
s =R
sin β
(Tβ
mg+ cos β − 1
)
.
Svar
s = 160 m
36

Uppgift 3/146: Dynamik/effekt
En bil med massan m accellererar på en plan vägsträcka. Den horisontellakraften F från vägbanan på bilen driver upp farten från v1 till v2 då bilenfärdas sträckan ℓ från A till B i bilden. Bestäm v2 om bilen utvecklar enkonstant effekt P under accelerationen. Du får anta att P , m, v1 och ℓ ärkända konstanter.
v1
A B
ℓ
v2F
m
Effektsamband
Kraften varierar enligt
P = Fv ⇔ F =P
v.
Rörelseekvationer
Rörelseekvation längsmed färdriktningen ger
F = ma.
Med hjälp av effektsambandet får vi
P
v= ma ⇔ a =
P
mv.
Rörelse i färdriktningen
Start- respektive sluttillstånd ges av
s = 0v = v1
s = ℓv = v2,
där s betecknar sträcka och v hastighet. Vi får
vdv = ads ⇔ vdv =P
mvds ⇔ v2dv =
P
mds ⇔
∫ v2
v1
v2dv =P
m
∫ ℓ
0ds ⇔
[1
3v3]v2
v1
=P
m[s]ℓ0 ⇔
v32 − v3
1 =3P
m(ℓ − 0) ⇔ v3
2 =3Pℓ
m+ v3
1.
Svar
v2 =
(3Pℓ
m+ v3
1
)1/3
37

Uppgift 3/155: Dynamik/arbete och energi
Två klot med massorna mA respektive mB är fästade i var sin ände av en lättstång enligt figuren. Från början är anordningen i vila och vinkeln mellanstången och horisontalplanet är θ. Anordningen kommer att rotera motursså att det mindre klotet träffar en fjäder med fjäderkonstanten k då stångennår horisontellt läge. Bestäm (a) hastigheten vB hos det mindre klotet precisinnan det träffar fjädern, och (b) fjäderns maximala deformation x.
[3][1] [2]
x
y
θ
g
ωk
mB
mA
vAvB
ℓA ℓB
Det är givet att mA = 4 kg, mB = 2 kg, ℓA = 0.30 m, ℓB = 0.45 m, θ = 60
och k = 35 kN/m. Tyngdaccelerationen antas vara g = 9.81 m/s2.
Energi i tillstånd [1]
Lägesenergin summeras till
Vg1 = mAgℓA sin θ + mBg(−ℓB sin θ) = (mAℓA − mBℓB)g sin θ.
Rörelseenergin är T1 = 0, då anordningen är i vila, och fjäderenergin är Ve1 =0, då fjädern är obelastad.
Arbete mellan [1] och [2]
Inga yttre krafter utför något arbete. Speciellt utför kraften i navet ingetarbete, eftersom navet inte förflyttas. Således är U ′
12 = 0.
Energi i tillstånd [2]
Lägesenergin vid [2] är Vg2 = 0 och fjäderenergin är Ve2 = 0, då fjädern ärobelastad. Rörelseenergin summeras till
T2 =1
2mAv2
A +1
2mBv2
B.
Mekaniska energisatsen från [1] till [2]
Vg1 + Ve1 + T1 + U ′12 = Vg2 + Ve2 + T2 ⇔
(mAℓA − mBℓB)g sin θ =1
2mAv2
A +1
2mBv2
B. (1)
38

De två kloten utför cirkulär rörelse kring upphängningspunkten. Om vinkel-hastigheten är ω får vi följande kinematiska samband:
vA = ωℓA, vB = ωℓB.
Uttrycken för vA och vB sättes in i ekv. (1):
(mAℓA − mBℓB)g sin θ =1
2mAω2ℓ2
A +1
2mBω2ℓ2
B ⇔ · · · ⇔
ω =
(
mAℓA − mBℓB
mAℓ2A + mBℓ2
B
2g sin θ
)1/2
.
Den eftersökta hastigheten ges sedan direkt av vB = ωℓB.
Arbete mellan [1] och [3]
Inga yttre krafter utför något arbete. Således är U ′13 = 0.
Energi i tillstånd [3]
Lägesenergin vid [3] är Vg3 = 0 och rörelseenergin är T3 = 0, då all rörelseen-ergi omvandlats till fjäderenergi vid maximal kompression. Fjäderenerginblir
Ve3 =1
2kx2.
Energisamband från [1] till [3]
Arbete och energisatsen ger
Vg1 + Ve1 + T1 + U ′13 = Vg3 + Ve3 + T3 ⇔
(mAℓA − mBℓB)g sin θ =1
2kx2 ⇔
x =
(
(mAℓA − mBℓB)2g sin θ
k
)1/2
.
Svar
a) vB = 1.162 m/s b) x = 12.07 mm
39

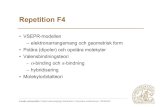
Uppgift 3/193: Dynamik/impuls
En månlandare med massan m nedstiger mot månytan med en starthastighet v1
vid tiden t = 0. Dess motor utvecklar en dragkraft T mot färdriktnin-gen, där T varierar enligt diagrammet i figuren nedan. Bestäm landarenshastighet v2 vid tiden t2 = 5 s. Landaren antas inte nudda marken.
800
400
[N]
[s]00 1 3 4 52
t
T
x
y
g
Tv
mg
Det är givet att m = 200 kg och v1 = 6 m/s. Tyngdaccelerationen antasvara g = 1.62 m/s2.
Rörelsemängd i starttillståndet
Vi undersöker rörelsemängden i y-riktningen (uppåt). Rörelsemängden istarttillståndet blir
Gy1 = −mv1,
där minustecknet beror på att hastigheten är ritad motsatt y-riktningen.
Impuls
Impulsen i y-riktningen ges av∫ t1
0
∑
Fydt =
∫ t2
0(T − mg)dt =
∫ t2
0Tdt − mgt2.
Här måste man vara noga med att krafterna får rätt tecken.
Rörelsemängd i sluttillståndet
Den slutliga rörelsemängden är
Gy2 = −mv2.
Eftersom vi antagit att hastigheten är riktad nedåt får vi ett minustecken.
Impulslagen
Vi kan nu tillämpa impulslagen i y-riktningen
↑: Gy1 +
∫ t2
0
∑
Fydt = Gy2 ⇔
40

−mv1 +
∫ t2
0Tdt − mgt2 = −mv2 ⇔
v2 = v1 − 1
m
∫ t2
0Tdt + gt2,
där integralen bestäms grafiskt till 2.4 kNs.
Svar
v2 = 2.10 m/s
41

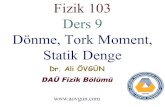
Uppgift 3/218: Dynamik/impuls
En så kallad ballistisk pendel används för att mäta en projektils hastighet.Projektilen har från början massan m och hastigheten v. Den träffar, ochfastnar i, en sandfylld låda med massan m0. Lådan är upphängd i ett repmed längden ℓ, så på grund av impulsen från projektilen pendlar lådan tillmaximal svängningsvinkel θ. Beräkna θ samt hur mycket av energin somgår förlorad vid stöten.
[1] [3][2]
m0
x
y
θ
ℓℓ cos θ
m+m0
v2
g
m
v
Det är givet att m = 0.060 kg, m0 = 20 kg, ℓ = 2 m och v = 600 m/s.Tyngdaccelerationen antas vara g = 9.81 m/s2.
Impulslagen från [1] till [2]
Vi undersöker rörelsemängden i x-riktningen (horisontellt).
→: G1x +
∫ [2]
[1]
∑
Fxdt = G1x
Inga yttre krafter påverkar systemet i x-riktningen, så att∑
Fx = 0. Vi får
−mv +
∫ [2]
[1]0 dt = −(m + m0)v2 ⇔ v2 =
m
m + m0v.
Energi i de tre tillstånden
Den totala energin i tillstånd [1] är
E1 = Vg1 + T1 = 0 +1
2mv2 =
1
2mv2.
Den totala energin i tillstånd [2] är
E2 = Vg2 +T2 = 0+1
2(m+m0)v2
2 =1
2(m+m0)
(m
m + m0v
)2
=m2v2
2(m + m0).
Den totala energin i tillstånd [3] är
E3 = Vg3 + T3 = (m + m0)g(ℓ − ℓ cos θ) + 0 = (m + m0)gℓ(1 − cos θ).
42

Energisamband från [2] till [3]
Eftersom snörkraften är vinkelrät mot rörelsen blir arbetet från [2] till [3]
U ′23 = 0.
Energisambandet ger
E2 + U ′23 = E3 ⇔ m2v2
2(m + m0)= (m + m0)gℓ(1 − cos θ) ⇔
m2v2
2gℓ(m + m0)2= 1 − cos θ ⇔ θ = arccos
[
1 − v2
2gℓ
(m
m + m0
)2]
.
Energiförlust från [1] till [2]
Den procentuella energiförändringen ges av
δE =E2 − E1
E1=
m2v2
2(m+m0) − 12mv2
12mv2
=m
m+m0− 1
1= − m0
m + m0= −0.997.
Svar
Utslagsvinkeln blir θ = 23.4, och energiförlusten blir δE = −99.7 %.
43

Uppgift 3/269: Dynamik/stötar
Två lika dana hockeypuckar kolliderar med sned infallsvinkel mot varandramed hastigheterna vA repektive vB enligt figur. Bestäm deras hastigheter v′
A
repektive v′B efter stöten till storlek och riktning om stöttalet är e.
θ
v′B
B
x
y
x
y
B
vB
βvA A v′A A
Det är givet att vA = 6 m/s, vB = 10 m/s, β = 30 och e = 0.75. Vi antaratt var och en av puckarna har massan m.
Komposantuppdelning
Komposantuppdelning av hastigheterna ger
vAx = vA
vAy = 0
vBx = −vB cos βvBy = vB sin β,
v′Ax = −v′
A
v′Ay = 0
v′Bx = v′
B cos θv′
By = v′B sin θ.
Impulslagen
Eftersom yttre krafter saknas kommer den totala rörelsemängden att bevarasi både x-led och y-led.
mvAx + mvBx = mv′Ax + mv′
Bx ⇔ vA − vB cos β = v′B cos θ − v′
A(1a)
mvAy + mvBy = mv′Ay + mv′
By ⇔ vB sin β = v′B sin θ (1b)
Dessa två ekvationer omfattar tre obekanta: v′A, v′
B och θ.
Stöttalet
Den tredje ekvationen erhålls från definitionen för stöttalet, som ska gälla inormalriktningen för stöten, det vill säga i x-led:
e =v′
Bx − v′Ax
vAx − vBx=
v′B cos θ + v′
A
vA + vB cos β⇔
evA + evB cos β = v′B cos θ + v′
A (2)
44

Beräkningar
Impulslagen och stöttalet ger således ett ekvationssystem
v′B cos θ − v′
A = vA − vB cos β (3a)
v′B sin θ = vB sin β (3b)
v′B cos θ + v′
A = evA + evB cos β (3c)
Vi adderar ekv. (3c) till ekv. (3a), vilket ger
2v′B cos θ = (1 + e)vA − (1 − e)vB cos β. (4)
Vidare ger ekv. (3b) att
v′B = vB
sin β
sin θ, (5)
vilket vi sätter in i ekv. (4):
2vB sin βcos θ
sin θ= (1 + e)vA − (1 − e)vB cos β ⇔
2vB sin β
(1 + e)vA − (1 − e)vB cos β= tan θ ⇔
θ = arctan2vB sin β
(1 + e)vA − (1 − e)vB cos β= 50.189 . . .
Därefter erhålls v′B = 6.509 . . . m/s genom insättning av θ i ekv. (5). Slutli-
gen ger ekv. (3a) att
v′A = v′
B cos θ + vB cos β − vA = 6.827 . . . m/s.
Svar
v′A = 6.83 m/s, v′
B = 6.51 m/s, θ = 50.2
45

Uppgift 8/20: Dynamik/odämpade svängningar
En bil med massan m kraschar med farten v0 in i en bergvägg. Bilensstötfångare har en fjäderkonst k. Bestäm (a) bilens hastighet x som funktionav tiden under det att bilen har kontakt med väggen och (b) stötfångarensmaximala deformation xmax.
v0
mkm
x
kx
Det är givet att m = 1200 kg, k = 525 kN/m och att v0 = 8 km/h.
Rörelseekvationer
Rörelseekvationen i x-koordinatriktningen
→: −kx = mx ⇔ x +k
mx = 0 (1)
Parameteridentifiering
Identifiera parametrarna i ekvationen för svängningar
x + 2ζωnx + ω2nx = f(t).
Vi har att
ωn =
√
k
m, ζ = 0, f(t) = 0.
Lösning
Lösningen har formen x = xh + xp. För ζ < 1 gäller enligt formelsamlingatt
xh = e−ζωnt (A cos ωdt + B sin ωdt) , ωd = ωn
√
1 − ζ2.
Med ζ = 0 får vixh = A cos ωnt + B sin ωnt.
För f(t) = 0 gällerxp = 0.
Vi får
x(t) = A cos ωnt + B sin ωnt (2a)
x(t) = −ωnA sin ωnt + ωnB cos ωnt (2b)
där hastigheten erhölls med derivering.
46

Begynnelsevillkor
Begynnelsevillkoren är enligt uppgift att x(0) = 0 och x = v0. Vi får ekva-tionssystemet
A cos 0 + B sin 0 = 0 (3a)
−ωnA sin 0 + ωnB cos 0 = v0. (3b)
Detta ger
A = 0 (4a)
ωnB = v0 ⇔ B =v0
ωn. (4b)
Sammantaget blir lösningen
x(t) =v0
ωnsin ωnt (5a)
x(t) = v0 cos ωnt (5b)
Svar
a) x(t) = v0 cos
t
√
k
m
, b) xmax = v0
√m
k= 106 mm
47

Uppgift 8/41: Dynamik/dämpade svängningar
Ny lydelse: Massan i bilden släpps från vila vid positionen x = x0 då t = 0bestäm dess position x(t) som funktion av tiden.
x
ck
m
mg
cxkx
Det är givet att m = 3 kg, k = 108 N/m och att c = 18 N·s/m. Tyngdaccel-erationen antas vara g = 9.81 m/s2.
Rörelseekvationer
Rörelseekvationen i x-koordinatriktningen
↓: −kx − cx + mg = mx ⇔ x +c
mx +
k
mx = g (1)
Parameteridentifiering
Identifiera parametrarna i ekvationen för svängningar
x + 2ζωnx + ω2nx = f(t).
Vi har att
ω2n =
k
m⇔ ωn =
√
k
m
2ζωn =c
m⇔ ζ =
c
2mωn=
c
2√
km= 0.500 . . .
f(t) = g.
Lösning
Lösningen har formen x = xh + xp. För ζ < 1 gäller
xh = e−ζωnt (A cos ωdt + B sin ωdt) , ωd = ωn
√
1 − ζ2.
För f(t) = g blir xp konstant; vi ansätter xp = C1, med xp = 0 och xp = 0.Insättning av xp i ekv. (1) ger
0 +c
m0 +
k
mC1 = g ⇔ C1 =
mg
k⇔ xp =
mg
k.
48

Lösningen har alltså formen
x(t) = e−ζωnt (A cos ωdt + B sin ωdt) +mg
k(2a)
x(t) = −ζωne−ζωnt (A cos ωdt + B sin ωdt) +
e−ζωnt (−Aωd sin ωdt + Bωd cos ωdt) , (2b)
där hastigheten erhölls med derivering.
Begynnelsevillkor
Begynnelsevillkoren är enligt uppgift att x(0) = x0 och x = 0. Vi fårekvationssystemet
x0 = A +mg
k(3a)
0 = −ζωnA + ωdB. (3b)
Detta ger
A = x0 − mg
k, B =
ζ√
1 − ζ2A =
ζ√
1 − ζ2
(
x0 − mg
k
)
.
Svar
x(t) = e−ζωnt (A cos ωdt + B sin ωdt) +mg
k
där
ωn =
√
k
m= 6.00 rad/s, ωd = ωn
√
1 − ζ2 = 5.20 rad/s,
A = x0 − mg
k= x0 − 0.273 m
B =ζ
√
1 − ζ2
(
x0 − mg
k
)
= 0.577x0 − 0.158 m.
49

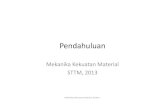
A Enhetscirkeln
x
y
−30, (√3/2,−1/2)
−60, (1/2,−√3/2)
−45, (1/√2,−1/
√2)
30, (√3/2, 1/2)
0, (1, 0)
−120, (−1/2,−√3/2)
150, (−√3/2, 1/2)
±180, (−1, 0)
135, (−1/√2, 1/
√2)
90, (0, 1)
45, (1/√2, 1/
√2)
60, (1/2,√3/2)
−90, (0,−1)
120, (−1/2,√3/2)
−150, (−√3/2,−1/2)
−135, (−1/√2,−1/
√2)
50