Lecture 10 - Harvard Universityusers.physics.harvard.edu/~morii/phys151/lectures/Lecture10.pdf ·...
23
Mechanics Physics 151 Lecture 10 Rigid Body Motion (Chapter 5)
Transcript of Lecture 10 - Harvard Universityusers.physics.harvard.edu/~morii/phys151/lectures/Lecture10.pdf ·...

MechanicsPhysics 151
Lecture 10Rigid Body Motion
(Chapter 5)

What We Did Last Time
! Found the velocity due to rotation! Used it to find Coriolis effect
! Connected ω with the Euler angles! Lagrangian " translational and rotational parts
! Often possible if body axes are defined from the CoM
! Defined the inertia tensor! Calculated angular momentum
and kinetic energy
s r
d ddt dt = + ×
ω
( )2jk i i jk ij ikI m r x xδ= −
=L Iω 212 2
T Iω⋅= =ω Iω

Diagonalizing Inertia Tensor
! Inertia tensor I can be made diagonal
( )2 2
2 2 2
2 2
( )( )
( )
i i i i i i i i i
i i i i i i i i i i i jk ij ik
i i i i i i i i i
m r x m x y m x zm y x m r y m y z m r x xm z x m z y m r z
δ − − − = − − − = − − − −
I
1
2
3
0 00 00 0
D
II
I
= =
I RIR! R is a rotation matrix0iI >
Kinematical properties of a rigid body are fully described by its mass, principal axes, and moments of inertia

Principal Axes
! Consider a rigid body with body axes x-y-z! Inertia tensor I is (in general) not diagonal! But it can be made diagonal by
! Rotate x-y-z by R " New body axes x’-y’-z’! In x’-y’-z’ coordinates
D =I RIR!
′ =ω Rω
D
′ ==
=′=
L RLRIωRIRRωI ω
!=RR 1!
One can choose a set of body axes that make the inertia tensor diagonal" Principal AxesHow do I
find them?

Finding Principal Axes
! Consider unit vectors n1, n2, n3 along principal axes
! To find the principal axes and principal moments:! Express I in in any body coordinates! Solve eigenvalue equation
! Eigenvectors point the principal axes! Use them to re-define the body coordinates to simplify I
! You can often find the principal axes by just looking at the object
i i iI=In n
1
2
3
0 00 00 0
D
II
I
= =
I RIR!
ni is an eigenvector of I with eigenvalue Ii
( ) 0λ− =I r 0λ− =I 1 2 3, ,I I Iλ =

Rotational Equation of Motion
! Concentrate on the rotational motion! Newtonian equation of motion gives
! Take the principal axes as the body axes
s
ddt
=
L N
“space” axes
b
ddt
+ =
L ω×L N
“body” axes
1 1 1 1
2 2 2 2
3 3 3 3
0 00 00 0
I II I
I I
ω ωω ωω ω
= =
L = Iω
s b
d ddt dt = + ×
ω

Euler’s Equation of Motion
! Special cases:!
!
1 1 1 1 1 1
2 2 2 2 2 2
3 3 3 3 3 3
I I Nd I I Ndt
I I N
ω ω ωω ω ωω ω ω
+ × =
1 1 2 3 2 3 1
2 2 3 1 3 1 2
3 3 1 2 1 2 3
( )( )( )
I I I NI I I NI I I N
ω ω ωω ω ωω ω ω
− − =− − =− − =
"""
Euler’s equation of motion for rigid body with one point fixed
2 3 0ω ω= = 1 1 1I Nω ="
2 3I I= 1 1 1I Nω ="

Torque-Free Motion
! No linear force " Conservation of linear momentum! No torque " Conservation of angular momentum
! Try N = 0 in Euler’s equation of motion
! We will do something more intuitive (hopefully)! Geometrical trick by L. Poinsot
1 1 2 3 2 3
2 2 3 1 3 1
3 3 1 2 1 2
( ) 0( ) 0( ) 0
I I II I II I I
ω ω ωω ω ωω ω ω
− − =− − =− − =
"""
Integrating these equation will give us energy and angular momentum conservation

Inertia Ellipsoid
! For any direction n,! If we express n using principal axes x’-y’-z’
! Consider a vector
i ij jI n I n= ⋅ =n In
2 2 2 21 1 2 2 3 3i iI I n I n I n I n= = + +
I= nρ
Inertia ellipsoid2 2 2 2
1 1 2 2 3 31 i iI I I Iρ ρ ρ ρ= = + +
Moment of inertia about axis n

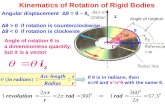
Inertia Ellipsoid
I= nρ
x′
y′
z′
11 I21 I
31 I
ρ
Inertia ellipsoid represents the moment of inertia of a rigid body in all directions
2 2 21 1 2 2 3 31 I I Iρ ρ ρ= + +
Usefulness of this definition will become
apparent soon …

Inertia Ellipsoid
! Inertia along axis n is
! F is a function (like potential) defined in the ρ space! F(ρ) = 1 " Inertia ellipsoid! Normal of the ellipsoid
given by the gradient
! Using
I= nρ
I = ⋅n In2 2 2
1 1 2 2 3 3( ) 1F I I Iρ ρ ρ≡ ⋅ = + + =ρ ρ Iρ
F = 1
ρ
F∇ ρ
2F∇ =ρ Iρ
2I T= =ρ n ω
2FT
∇ =ρ LSurface of the
inertia ellipsoid is perpendicular to L

Invariable Plane
! As ρ moves, inertia ellipsoid must rotate to satisfy this condition continuously
! Consider the projection of ρ on L
! The ellipsoid is touchinga fixed plane perpendicular to L
2FT
∇ =ρ L Surface of inertia ellipsoid at ρ is perpendicular to the angular momentum L
22
TL LL T⋅ ⋅= =ρ L ω L
constant
ρ
L
2TL
Invariable plane
L is conserved!

Invariable Plane
! Inertia ellipsoid touches the invariable plane! Distance between the center and the plane is
! Touching point = instantaneous axis of rotation! Tip of the ρ vector is momentarily at rest in space
! i.e. it’s not sliding, butrolling without slippingon the invariable plane
2T LDetermined by the initial conditions
ρ
02
ddt T
= = =ρ ω×ωω×ρ

Invariable Plane
! Inertia ellipsoid rolls on the invariable plane! Rotation of ellipsoid gives the rotation of the body! Direction of ρ gives the direction of ω in space
! Touching point draws curves! Curve drawn on the ellipsoid = polhode! Curve drawn on the invariable plane
= herpolhode
! Let’s examine a fewsimple cases

Simple Cases
! Inertia ellipsoid is a sphere (I1 = I2 = I3)! ρ is constant and parallel to L! Stable rotation
ρ
L

Simple Cases
! Initial axis is close to one of the principal axes! Assume I1 > I2 > I3
! Stable rotation around I1 and I3
! Not so obvious around I2
! If ω1 = ω3 = 0, ω2 is constant
! Small deviation leads to instability
11 I
31 I1 1 2 3 2 3
2 2 3 1 3 1
3 3 1 2 1 2
( ) 0( ) 0( ) 0
I I II I II I I
ω ω ωω ω ωω ω ω
− − =− − =− − =
"""

Simple Cases
! Since I1 > I2 > I3, distance allows a polhode that wraps around the inertia ellipsoid
! Rotation around a principal axis is stable except for the one with the intermediate moment of inertia
21 I

Simple Cases
! Inertia ellipsoid is symmetric around one axis! I1 = I2 ≠ I3
! ρ draws a cone (space cone) on the invariable plane! ρ draws a cone (body cone) in the inertia ellipsoid! Body cone rolls on the space cone
ρ
L

Precession
! I1 = I2 turns the Euler’s equation of motion to
! ω precesses around the I3 axis! Draws the body cone
1 1 2 3 1 3
1 2 3 1 3 1
3 3
( )( )
0
I I II I II
ω ω ωω ω ωω
= −= −=
"""
ω3 is constantConsider it as a given initial condition
1 2 2 1,ω ω ω ω= −Ω = Ω" " 3 13
1
I II
ω−Ω ≡
1 2cos , sinA t A tω ω= Ω = Ω
3ω ω
A

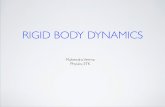
Rotation Under Torque
! We introduce torque! Things get messy
! Consider a spinning top! Define Euler angles
1 1 2 3 2 3 1
2 2 3 1 3 1 2
3 3 1 2 1 2 3
( )( )( )
I I I NI I I NI I I N
ω ω ωω ω ωω ω ω
− − =− − =− − =
"""
z
y
xφ
ψ
θ

Lagrangian
! Assume I1 = I2 ≠ I3! Kinetic energy given by! Use Euler angles
2 2 21 1 2 3 3
1 1( )2 2
T I Iω ω ω= + +
sin sin coscos sin sin
cos
φ ψ θ θ ψφ ψ θ θ ψ
φ θ ψ
+ = − +
ω
" "" "
" "
2 2 2 231 ( sin ) ( cos )2 2
IIT θ φ θ φ θ ψ= + + +" " " "

Lagrangian
! Potential energy is given by the height of the CoM
! Lagrangian is
! Finally we are in real business!! How we solve this?
! Note φand ψ are cyclic! Can define conjugate momenta that conserve
! To be continued …
l
θcosV Mgl θ=
2 2 2 231 ( sin ) ( cos ) cos2 2
IIL Mglθ φ θ φ θ ψ θ= + + + −" " " "

Summary
! Discussed rotational motion of rigid bodies! Euler’s equation of motion
! Analyzed torque-free rotation! Introduced the inertia ellipsoid! It rolls on the invariant plane! Dealt with simple cases
! Started discussing heavy top! Found Lagrangian " Will solve this next time
x′
y′
z′
11 I21 I
31 I
ρ
2 2 2 231 ( sin ) ( cos ) cos2 2
IIL Mglθ φ θ φ θ ψ θ= + + + −" " " "