RIGID BODY DYNAMICS - IIT Kanpur
26
RIGID BODY DYNAMICS Mahendra Verma Physics, IITK
Transcript of RIGID BODY DYNAMICS - IIT Kanpur
RIGID BODY DYNAMICS
Mahendra Verma Physics, IITK
Equa%on of mo%on of a rigid body
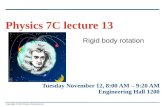
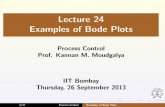
Rolling Cylinder
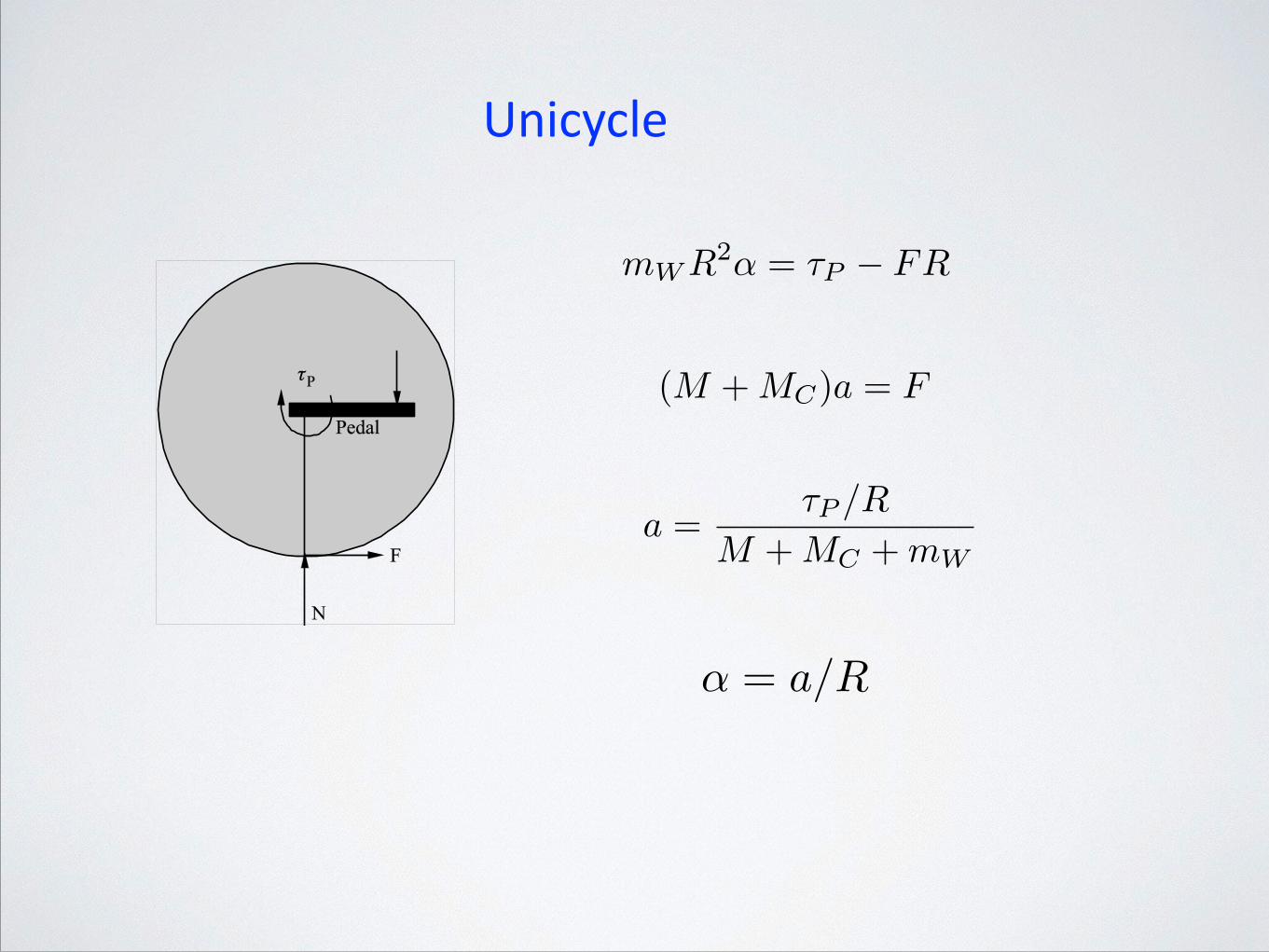
Unicycle
mWR2↵ = ⌧P � FR
(M +MC)a = F
a =⌧P /R
M +MC +mW
↵ = a/R
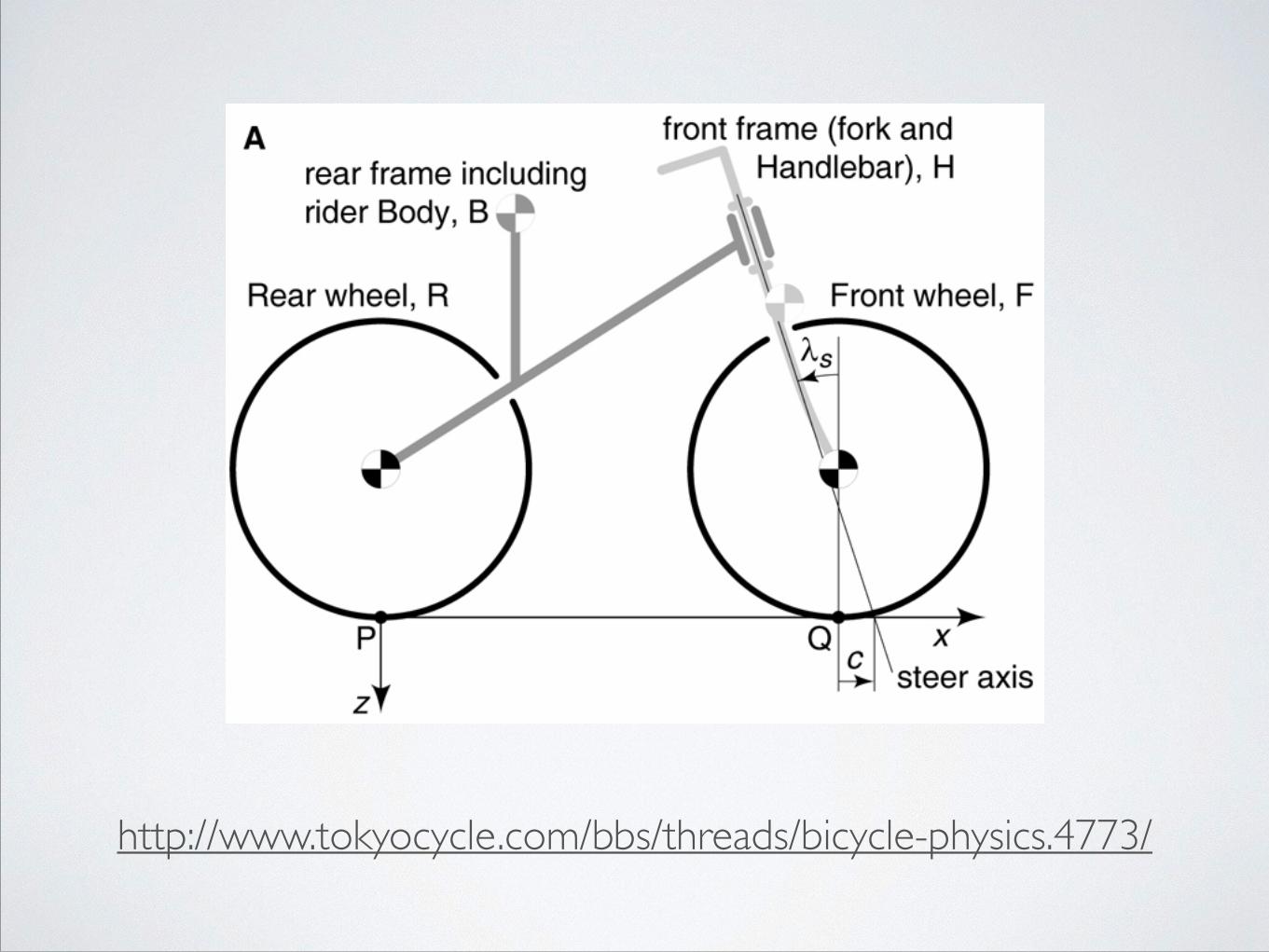
http://www.tokyocycle.com/bbs/threads/bicycle-physics.4773/
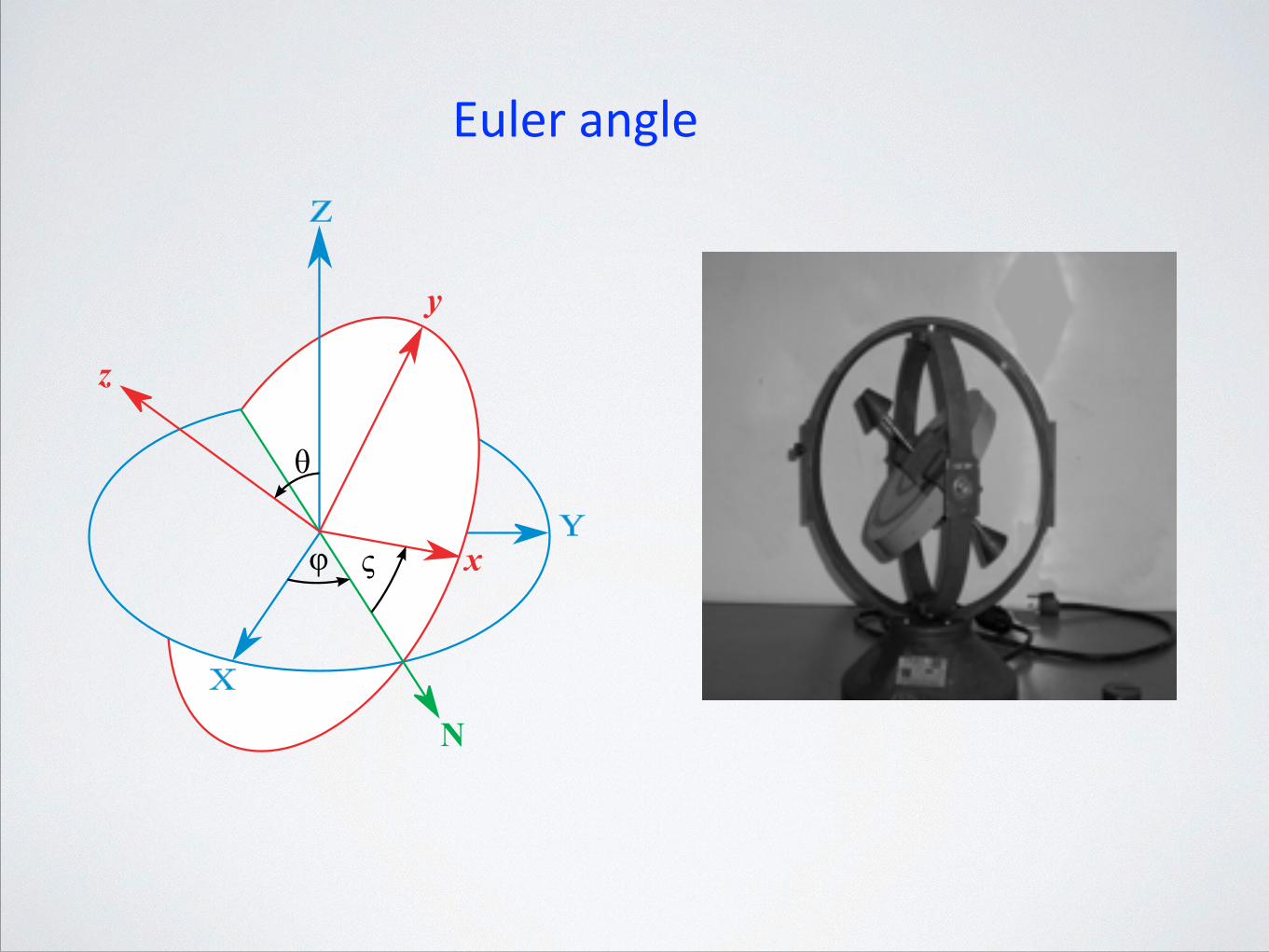
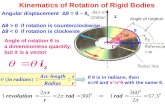
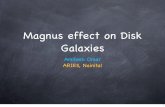
Euler angle
NX
Y
Z
z
x
y
�
�
�
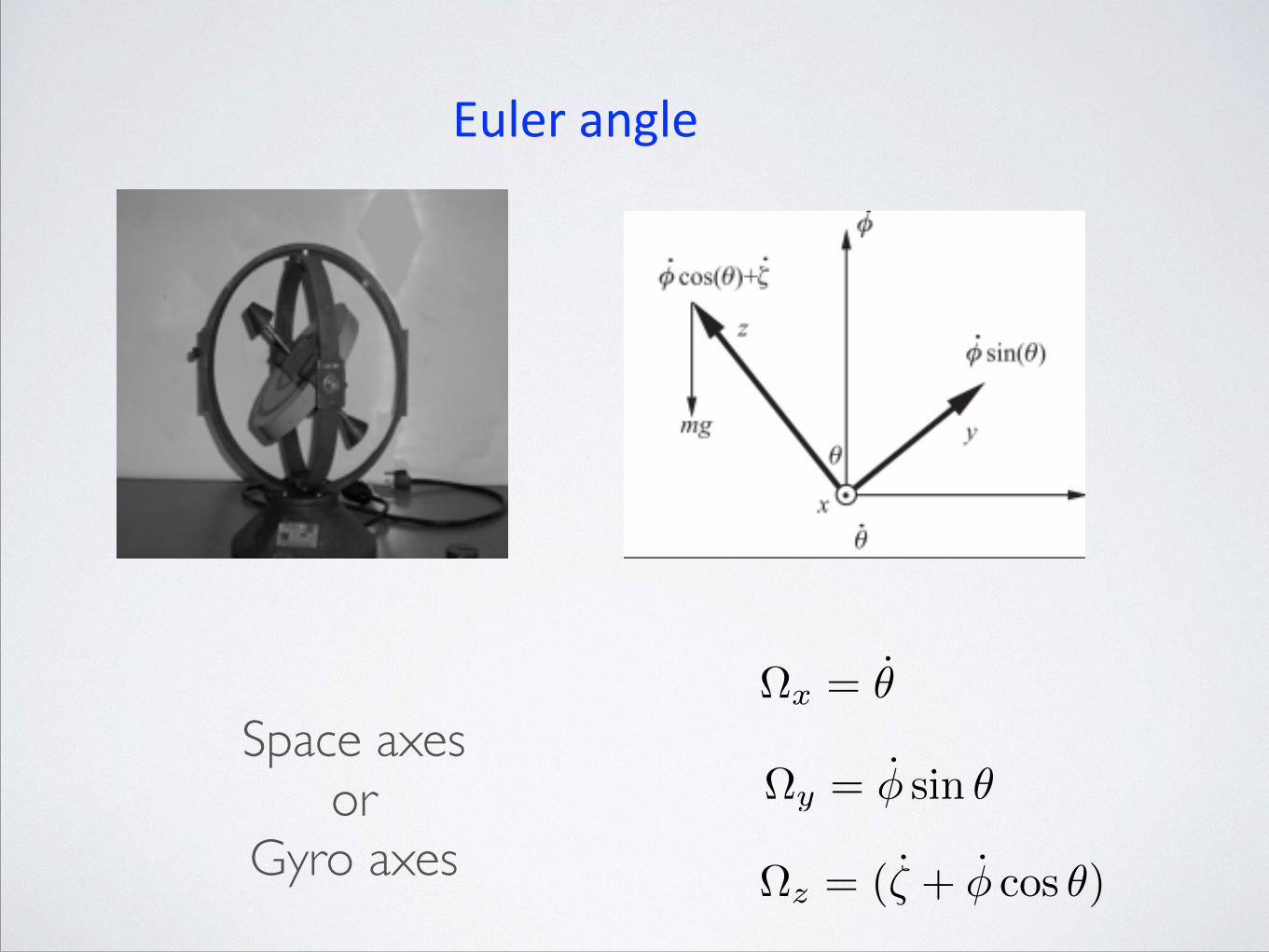
Euler angle
Space axes or
Gyro axes⌦z = (
˙⇣ + ˙� cos ✓)
⌦x
= ✓
⌦y = � sin ✓
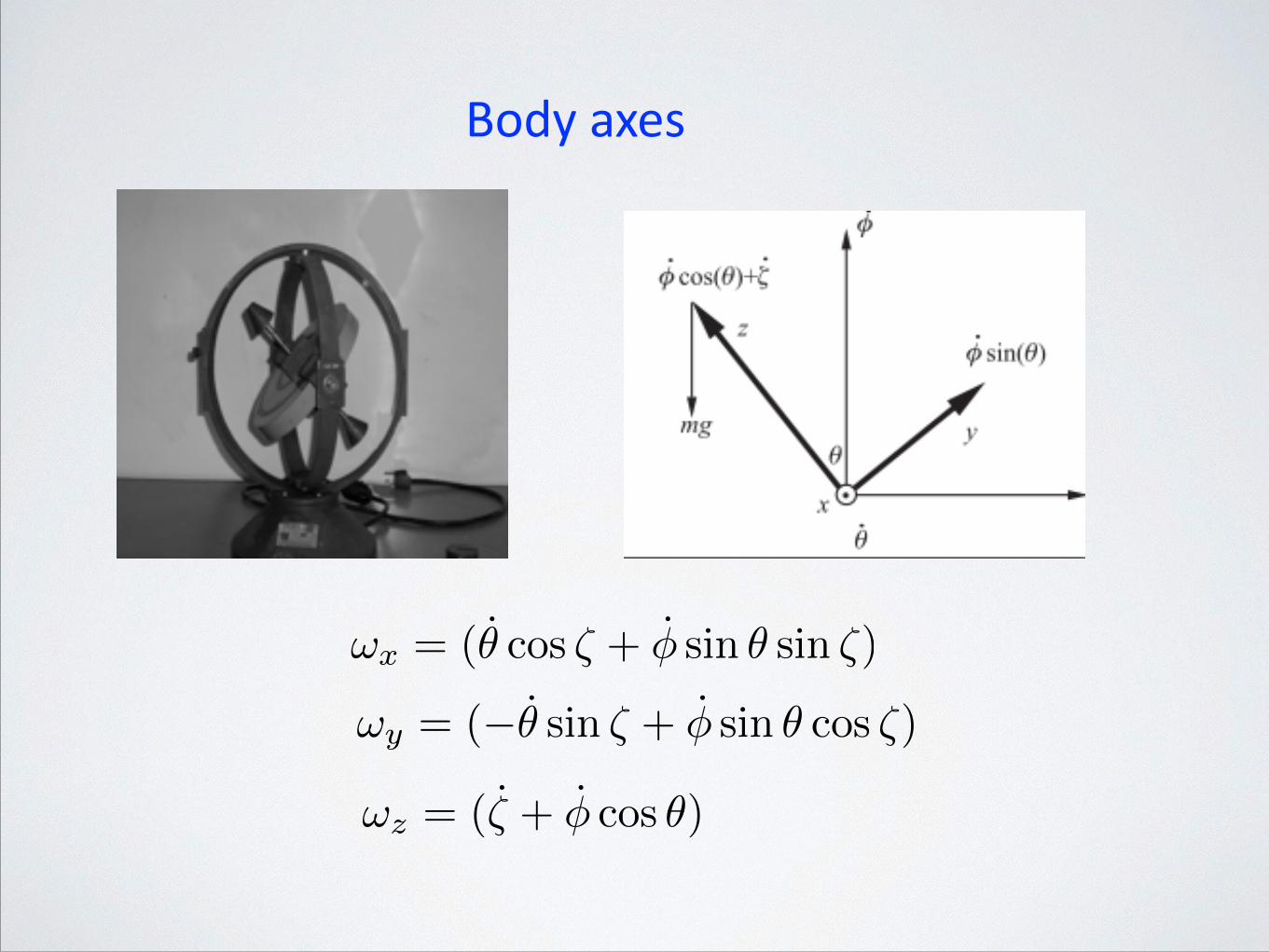
Body axes
!z = (
˙⇣ + ˙� cos ✓)
!x
= (
˙✓ cos ⇣ + ˙� sin ✓ sin ⇣)
!y = (� ˙✓ sin ⇣ + ˙� sin ✓ cos ⇣)
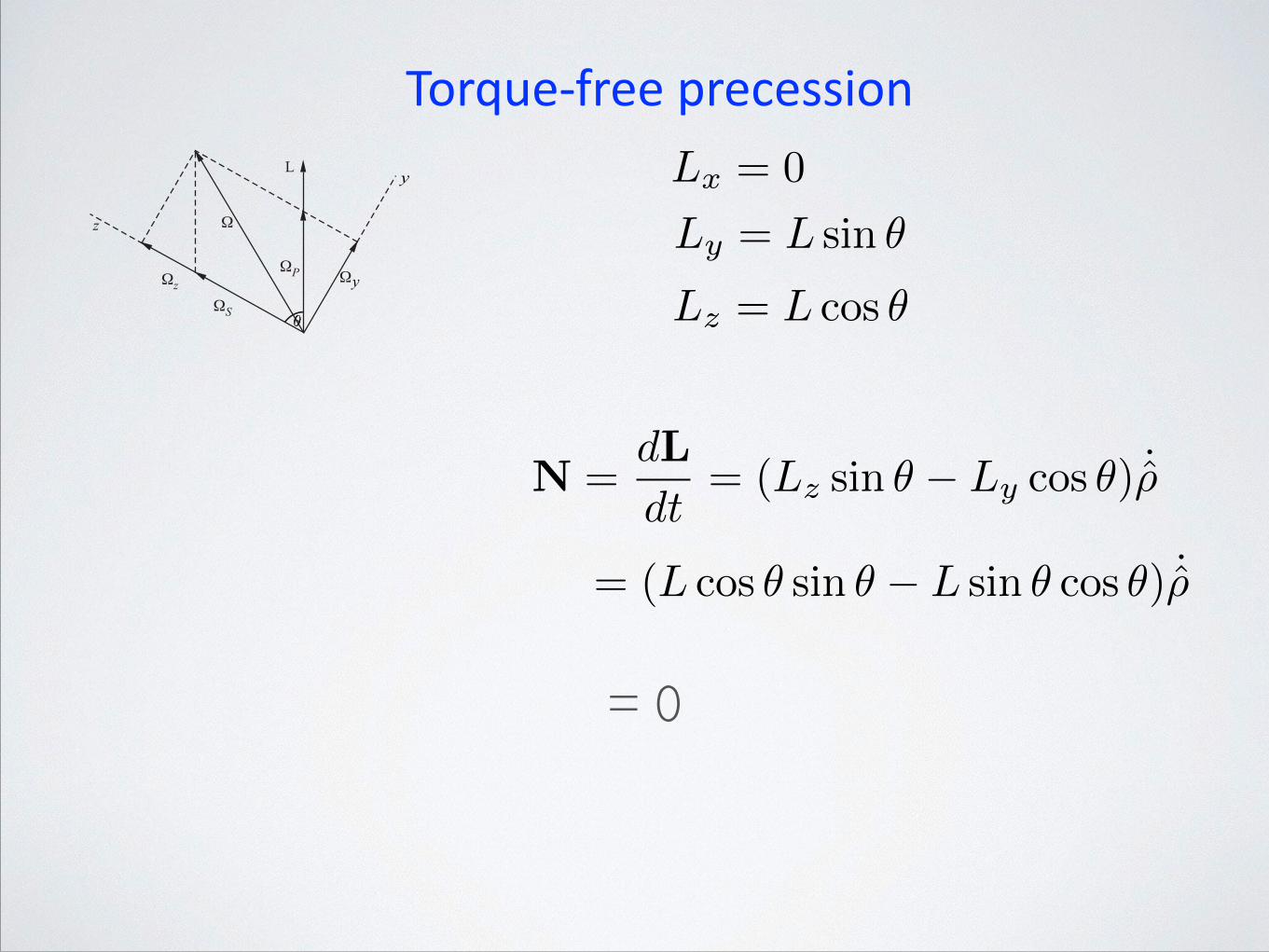
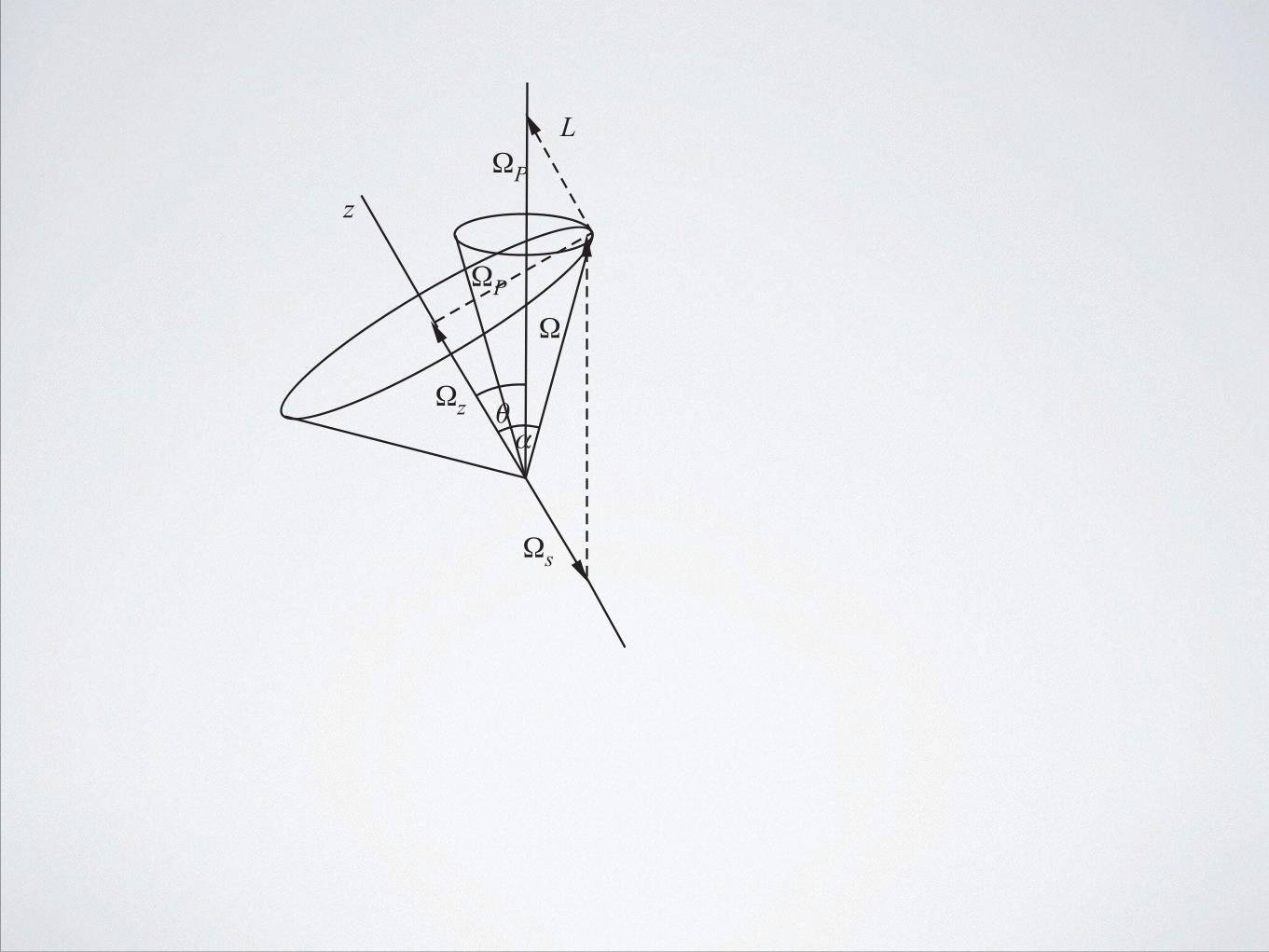
Torque-‐free precession
= 0
= (L cos ✓ sin ✓ � L sin ✓ cos ✓) ˙⇢
Lz = L cos ✓
y
y
Ly = L sin ✓
Lx
= 0
N =
dL
dt= (Lz sin ✓ � Ly cos ✓) ˙⇢
˙⇢ = ⌦�
N =
dL
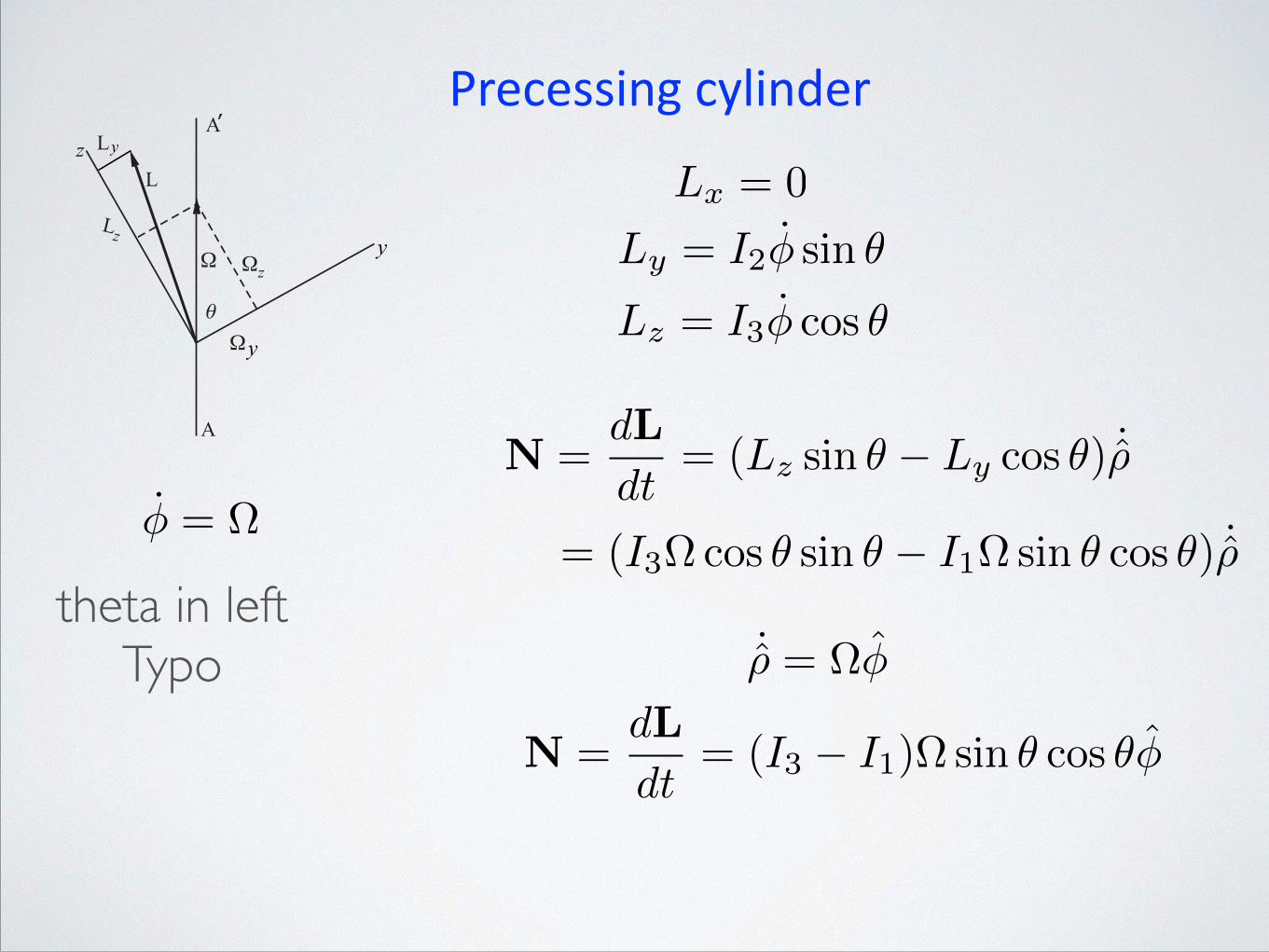
dt= (I3 � I1)⌦ sin ✓ cos ✓ ˆ�
Precessing cylinder
= (I3⌦ cos ✓ sin ✓ � I1⌦ sin ✓ cos ✓) ˙⇢
Lz = I3 ˙� cos ✓
y
y
y
Lx
= 0
Ly = I2� sin ✓
� = ⌦
theta in left Typo
N =
dL
dt= (Lz sin ✓ � Ly cos ✓) ˙⇢
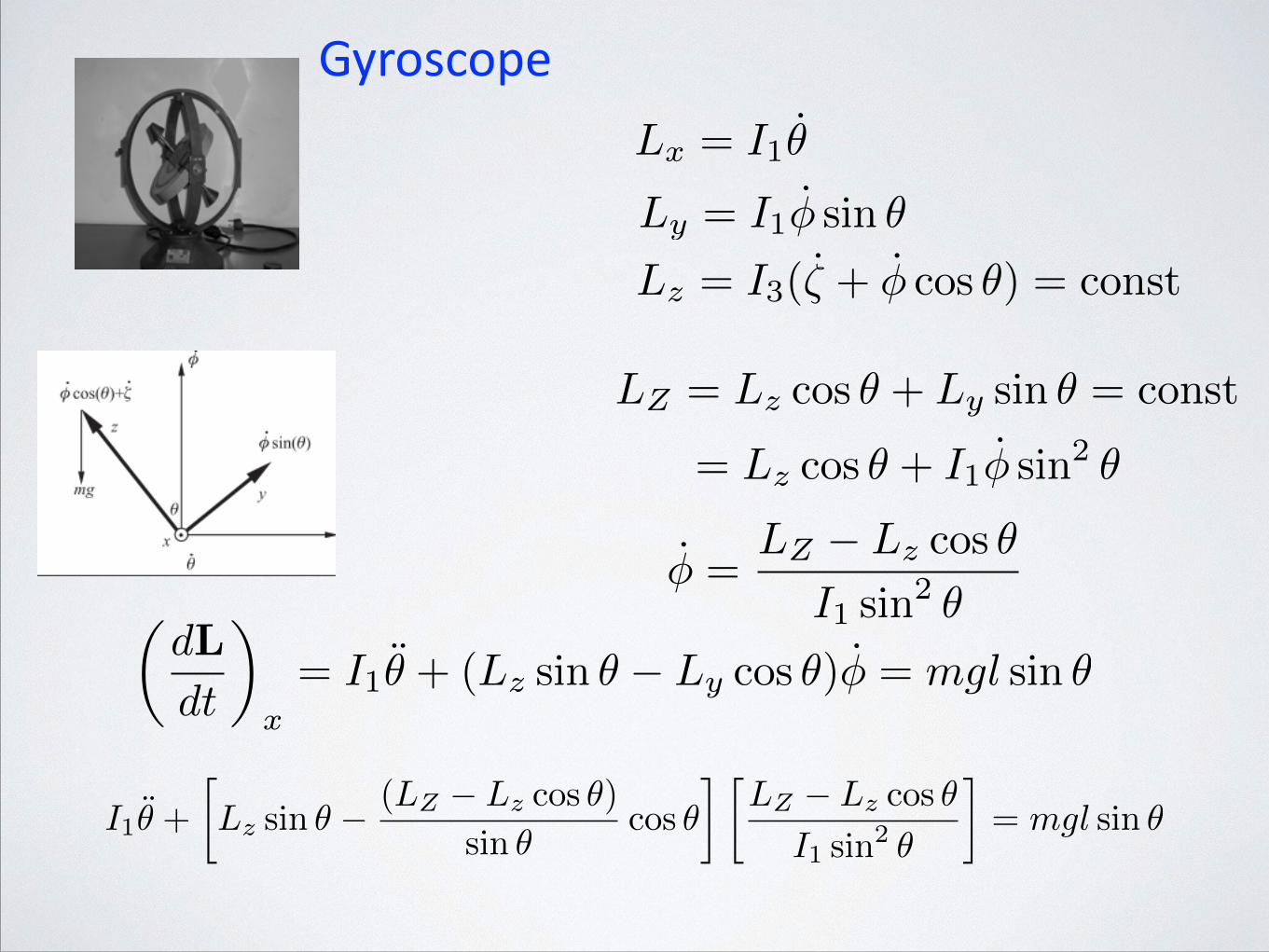
Gyroscope
˙� =
LZ � Lz cos ✓
I1 sin2 ✓
I1¨✓ +
Lz sin ✓ �
(LZ � Lz cos ✓)
sin ✓cos ✓
� LZ � Lz cos ✓
I1 sin2 ✓
�= mgl sin ✓
Lz = I3( ˙⇣ + ˙� cos ✓) = const
= Lz cos ✓ + I1 ˙� sin
2 ✓
Lx
= I1✓
Ly = I1� sin ✓
LZ = Lz cos ✓ + Ly sin ✓ = const
✓dL
dt
◆
x
= I1¨✓ + (Lz
sin ✓ � Ly
cos ✓) ˙� = mgl sin ✓
L2x
2I1+
L2y
2I1+
L2z
2I3+mgl cos ✓ = E
1
2
I1( ˙✓2+
˙�2sin
2 ✓) +L2z
2I3+mgl cos ✓ = E
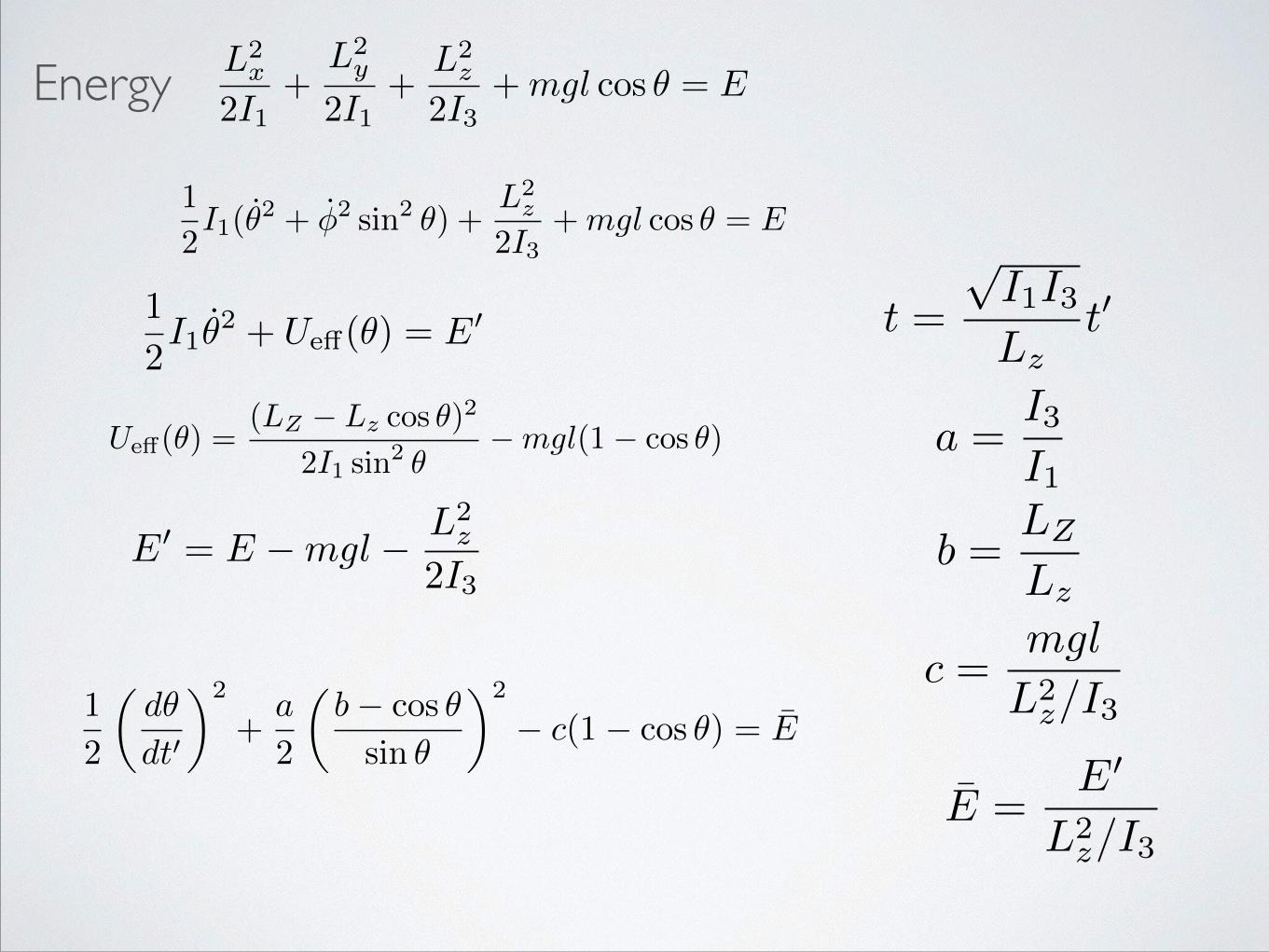
Energy
1
2I1✓
2 + Ue↵(✓) = E0
Ue↵(✓) =(LZ � Lz cos ✓)2
2I1 sin2 ✓
�mgl(1� cos ✓)
E0 = E �mgl � L2z
2I3
t =
pI1I3Lz
t0
a =I3I1
b =LZ
Lz
c =mgl
L2z/I3
E =E0
L2z/I3
1
2
✓d✓
dt0
◆2
+
a
2
✓b� cos ✓
sin ✓
◆2
� c(1� cos ✓) = ¯E
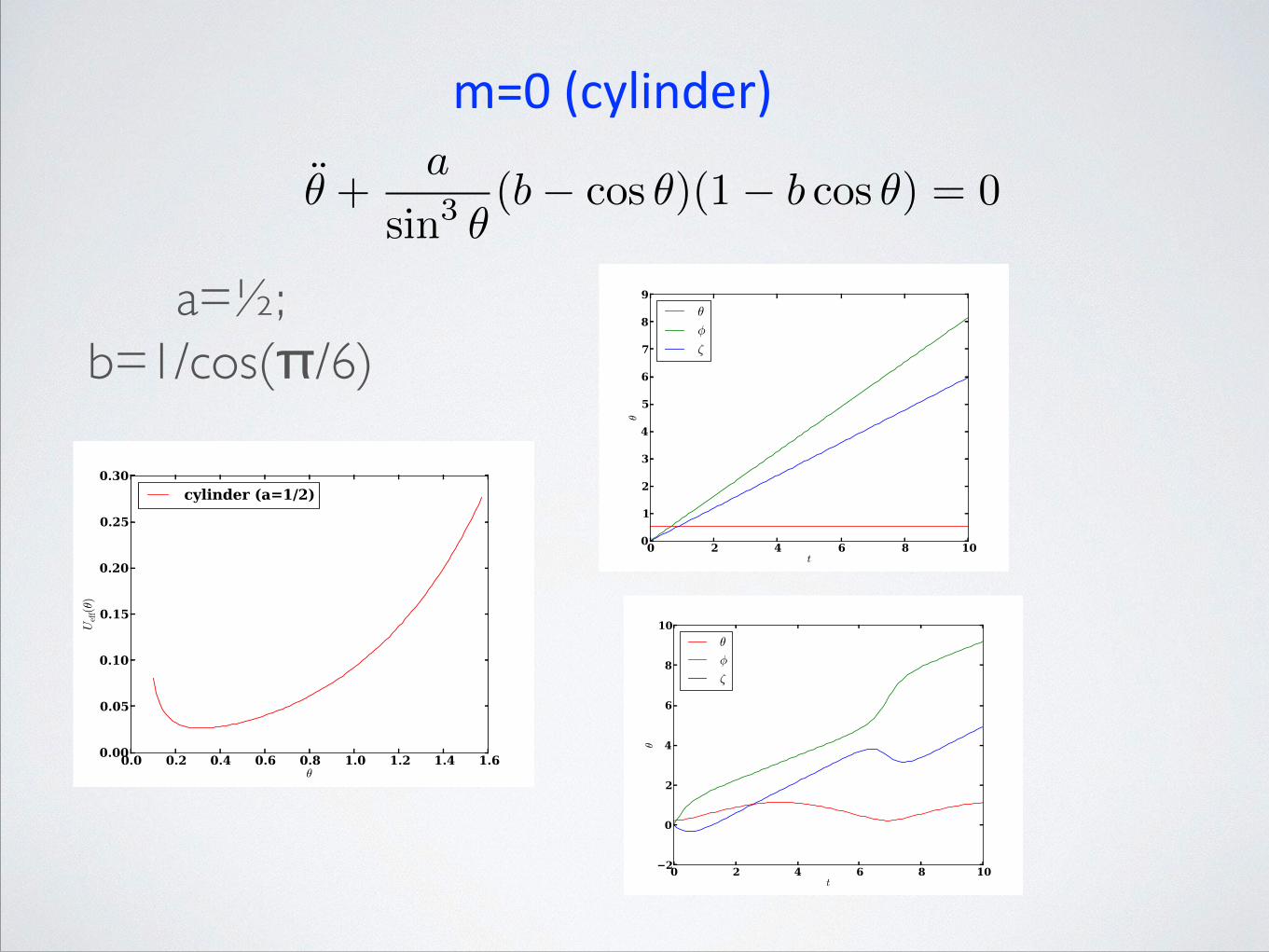
m=0 (cylinder)¨✓ +
a
sin
3 ✓(b� cos ✓)(1� b cos ✓) = 0
a=½; b=1/cos(π/6)
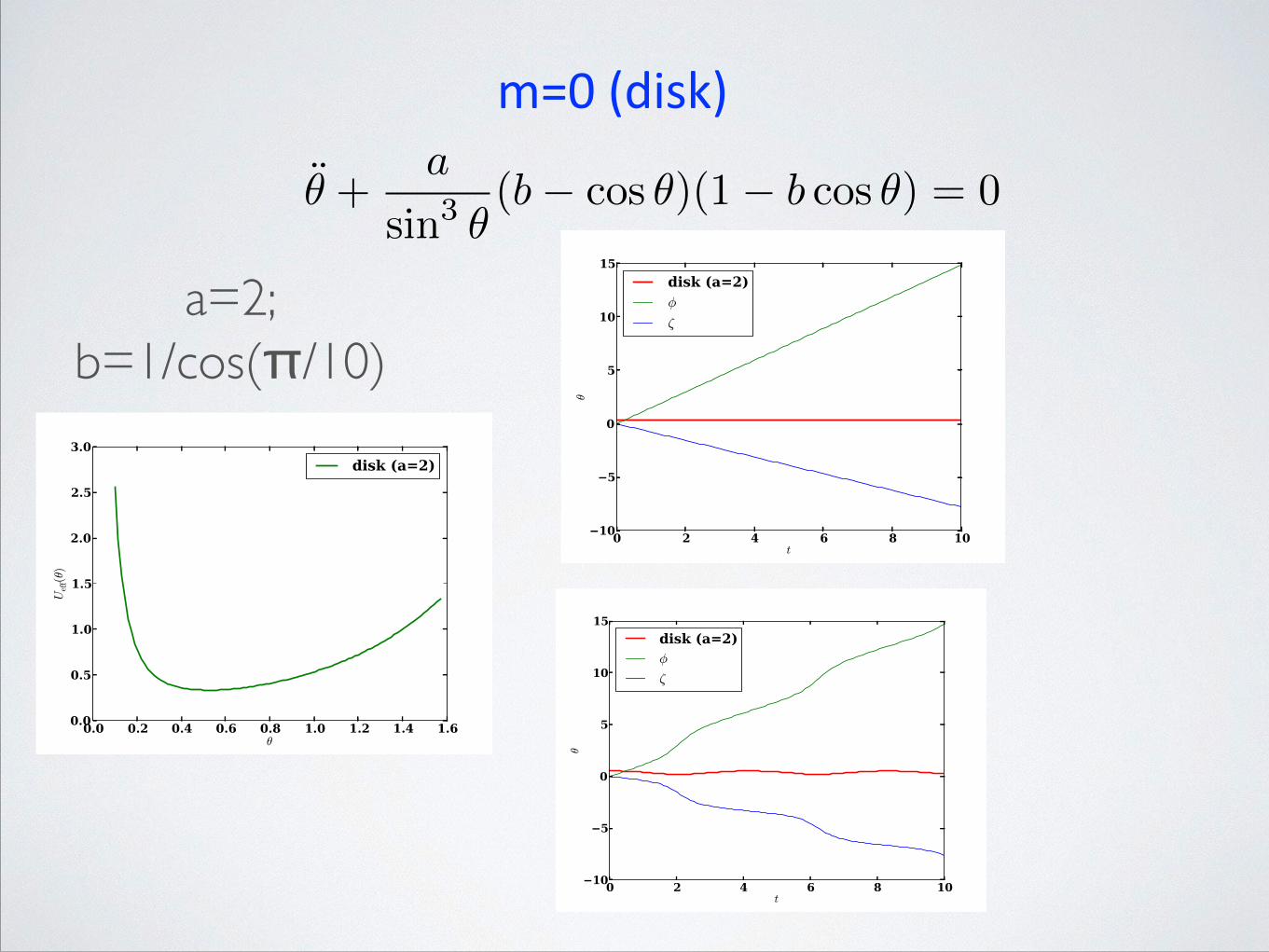
m=0 (disk)¨✓ +
a
sin
3 ✓(b� cos ✓)(1� b cos ✓) = 0
a=2; b=1/cos(π/10)
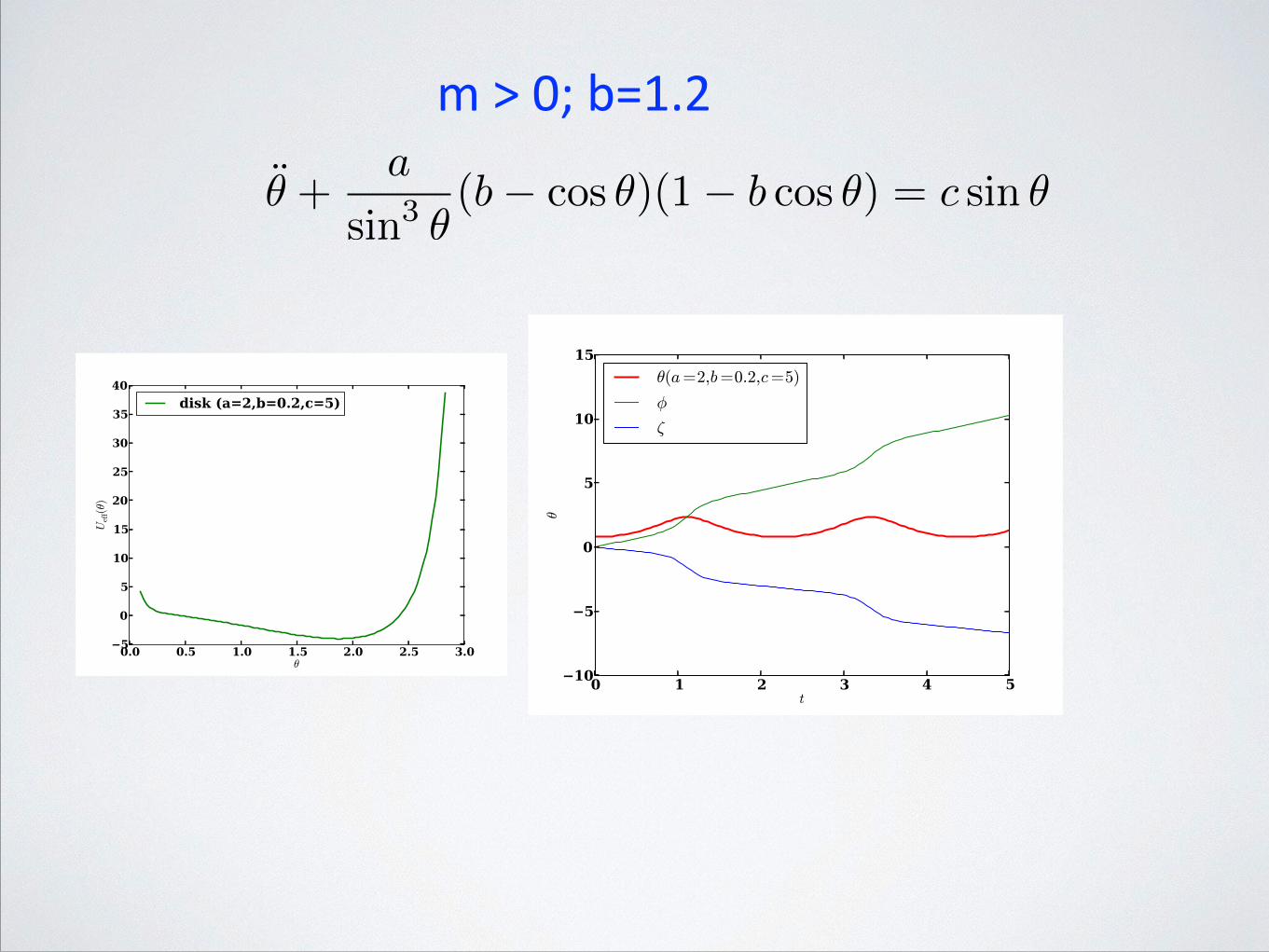
m > 0; b=1.2¨✓ +
a
sin
3 ✓(b� cos ✓)(1� b cos ✓) = c sin ✓
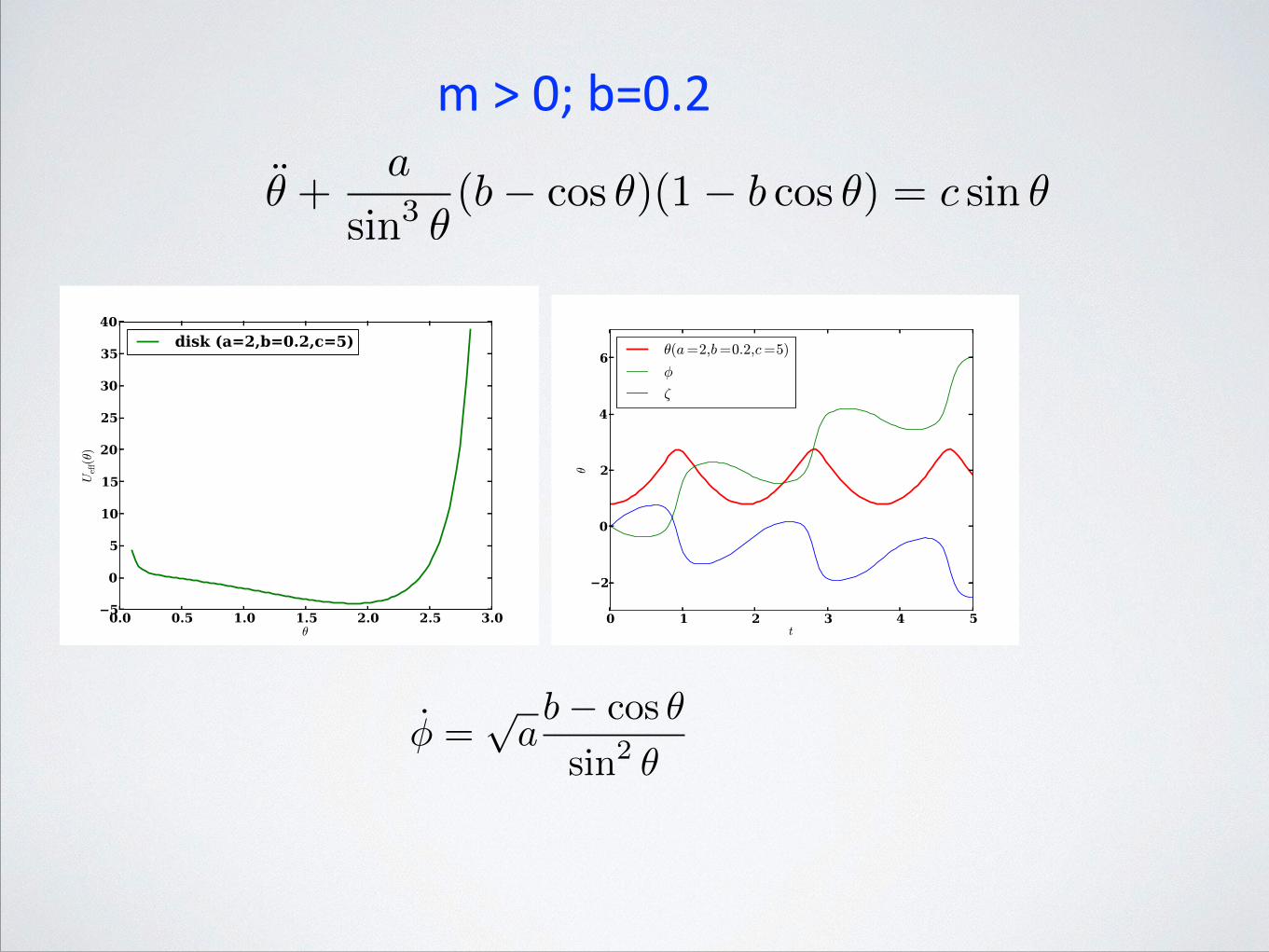
m > 0; b=0.2¨✓ +
a
sin
3 ✓(b� cos ✓)(1� b cos ✓) = c sin ✓
˙� =
pab� cos ✓
sin
2 ✓
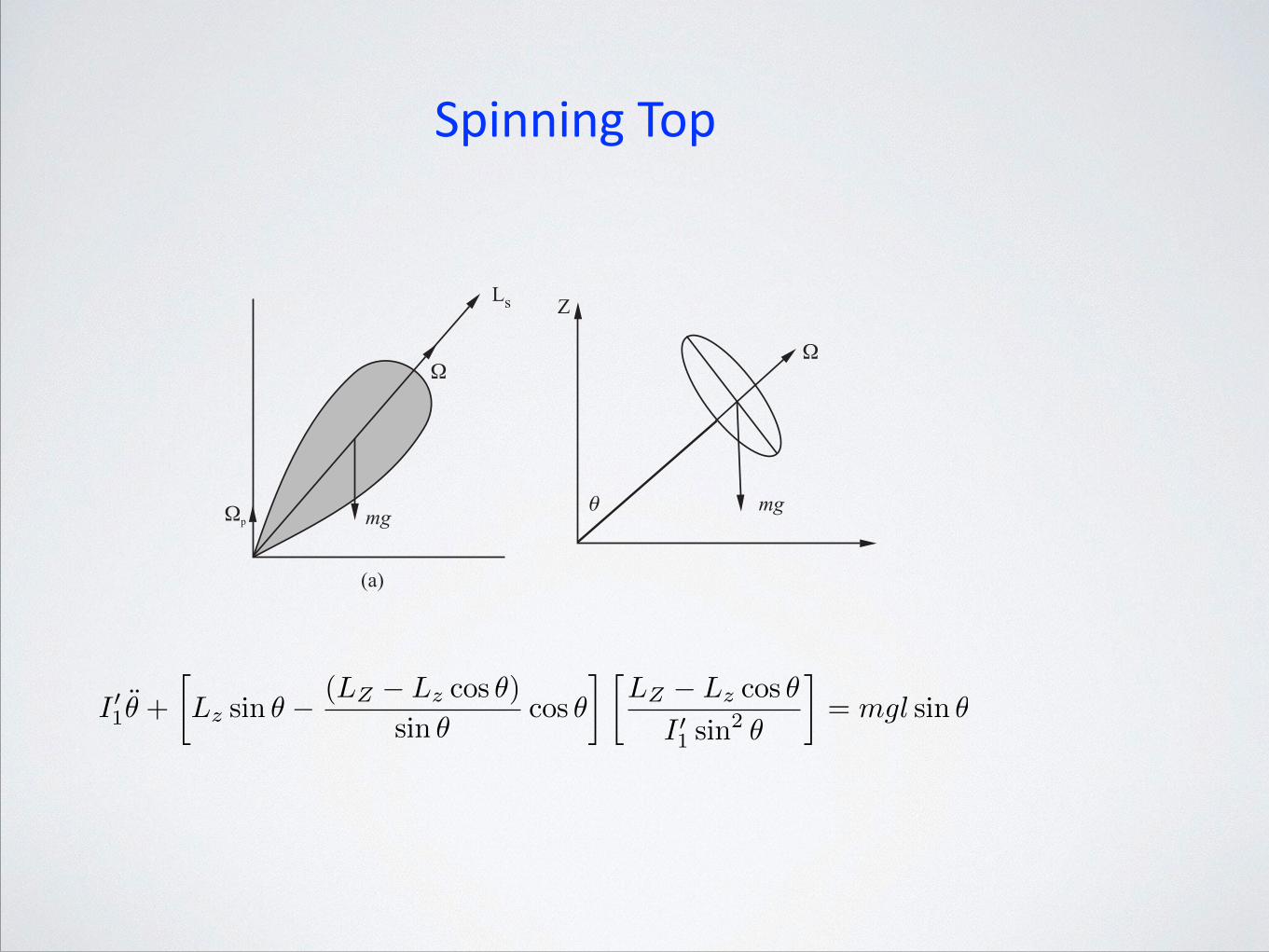
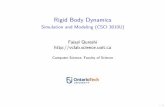
Spinning Top
I 01¨✓ +
Lz sin ✓ �
(LZ � Lz cos ✓)
sin ✓cos ✓
� LZ � Lz cos ✓
I 01 sin2 ✓
�= mgl sin ✓
https://www.youtube.com/watch?v=cquvA_IpEsA A Hila Science Video
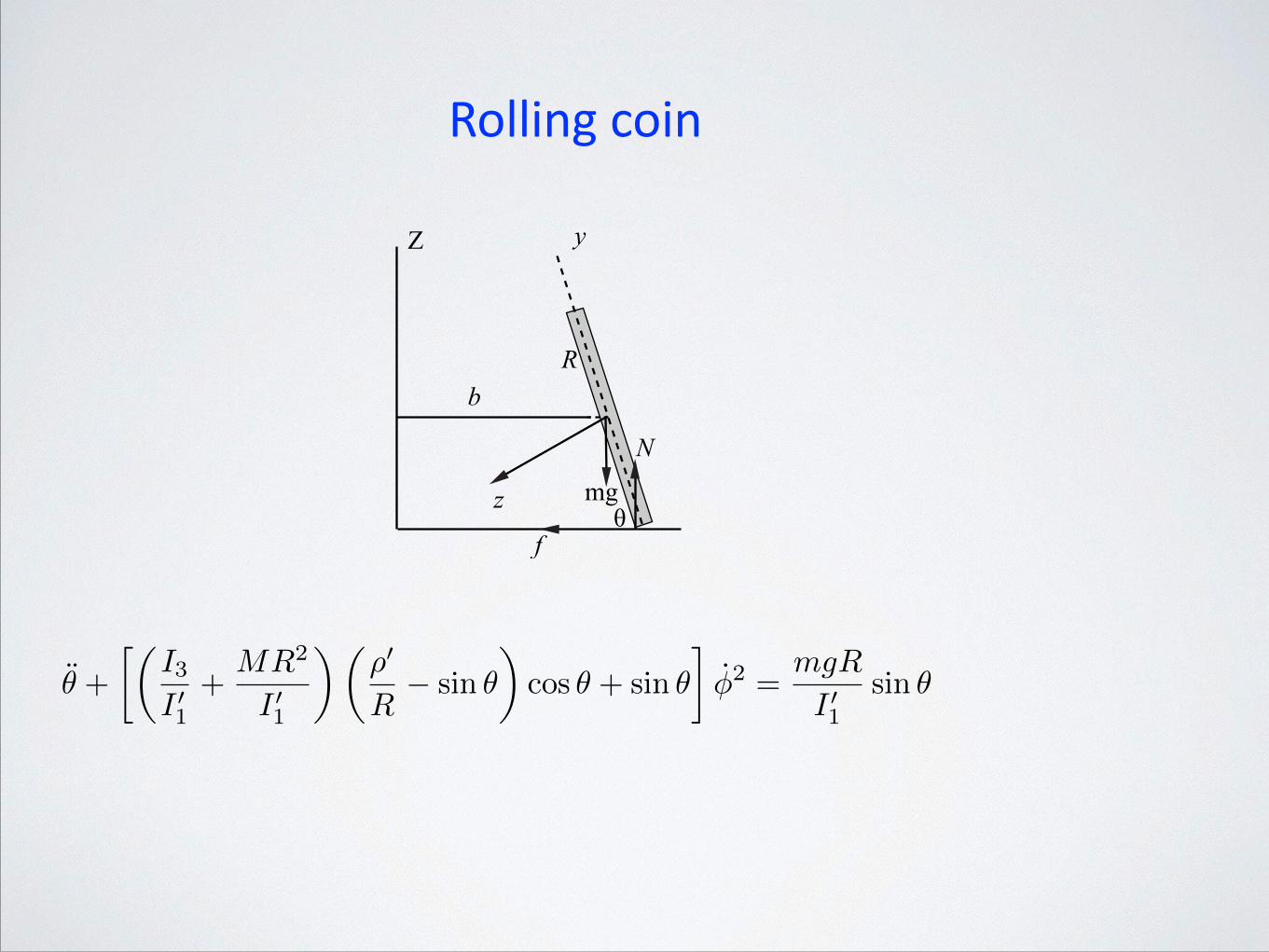
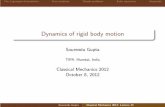
Rolling coin
f�
z
yZ
b
mg
R
N
¨✓ +
✓I3I 01
+
MR2
I 01
◆✓⇢0
R� sin ✓
◆cos ✓ + sin ✓
�˙�2
=
mgR
I 01sin ✓
Euler Equa%ons
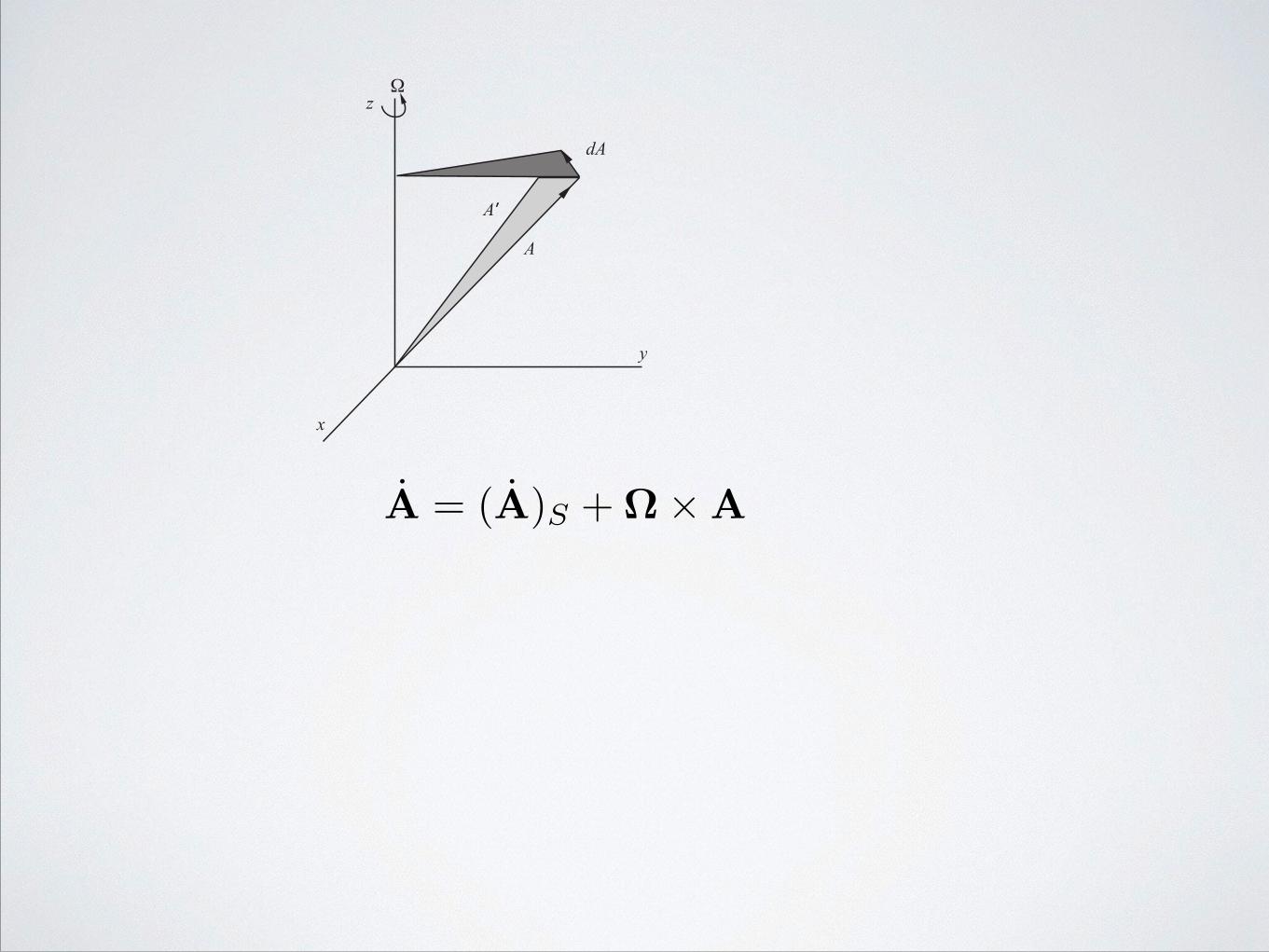
A = (A)S +⌦⇥A
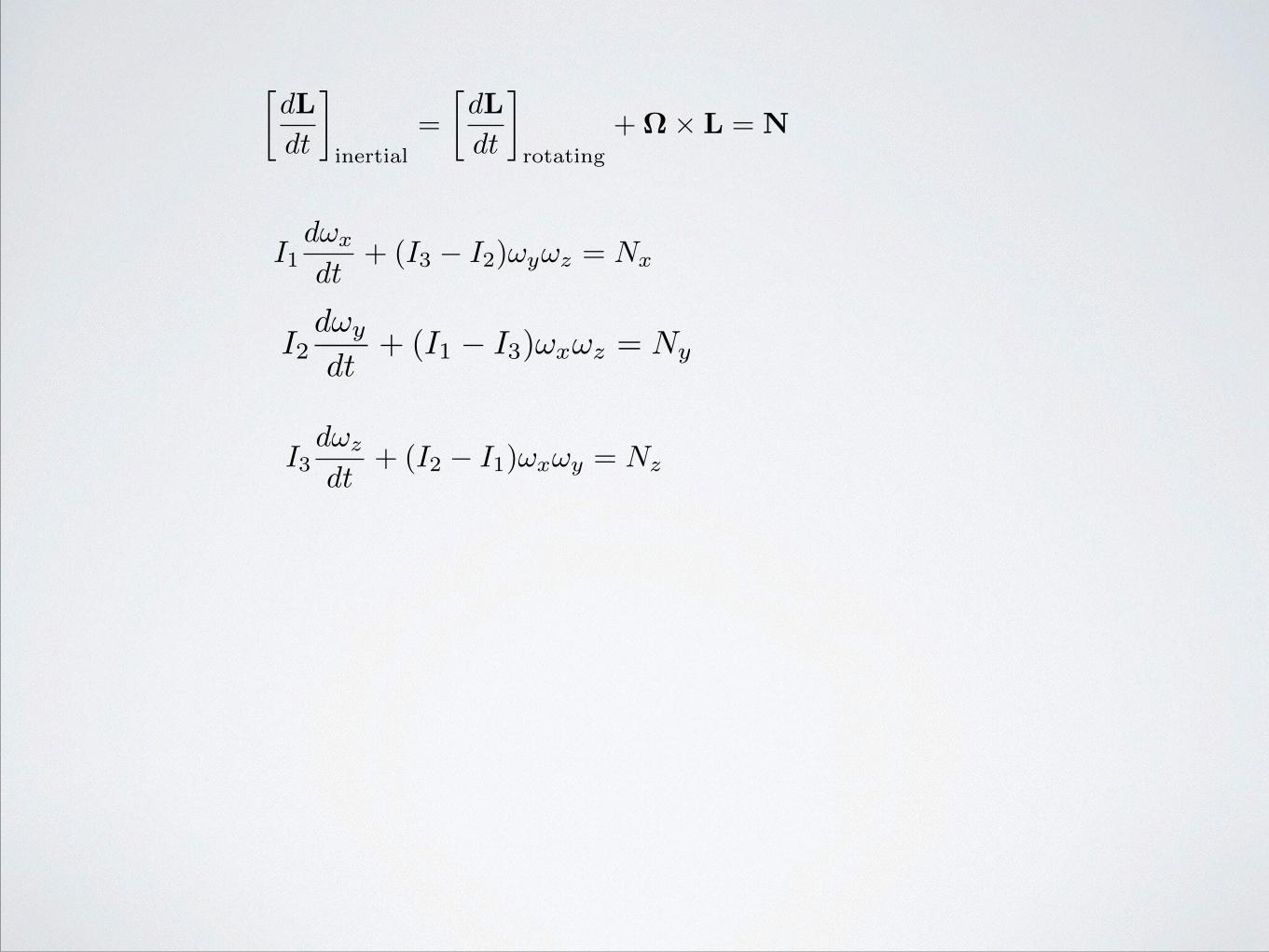
dL
dt
�
inertial
=
dL
dt
�
rotating
+⌦⇥ L = N
I1d!
x
dt+ (I3 � I2)!y
!z
= Nx
I2d!
y
dt+ (I1 � I3)!x
!z
= Ny
I3d!
z
dt+ (I2 � I1)!x
!y
= Nz
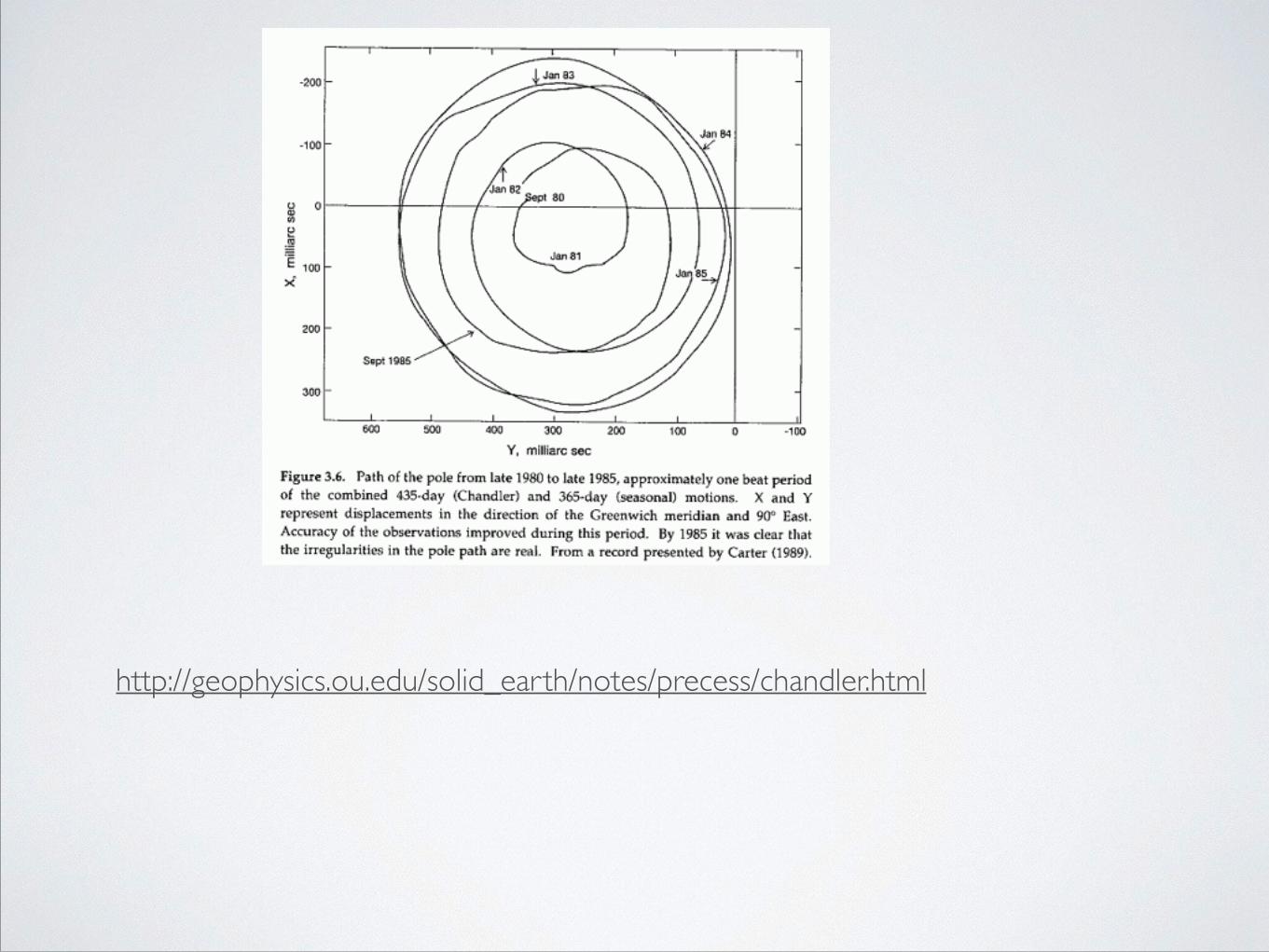
http://geophysics.ou.edu/solid_earth/notes/precess/chandler.html
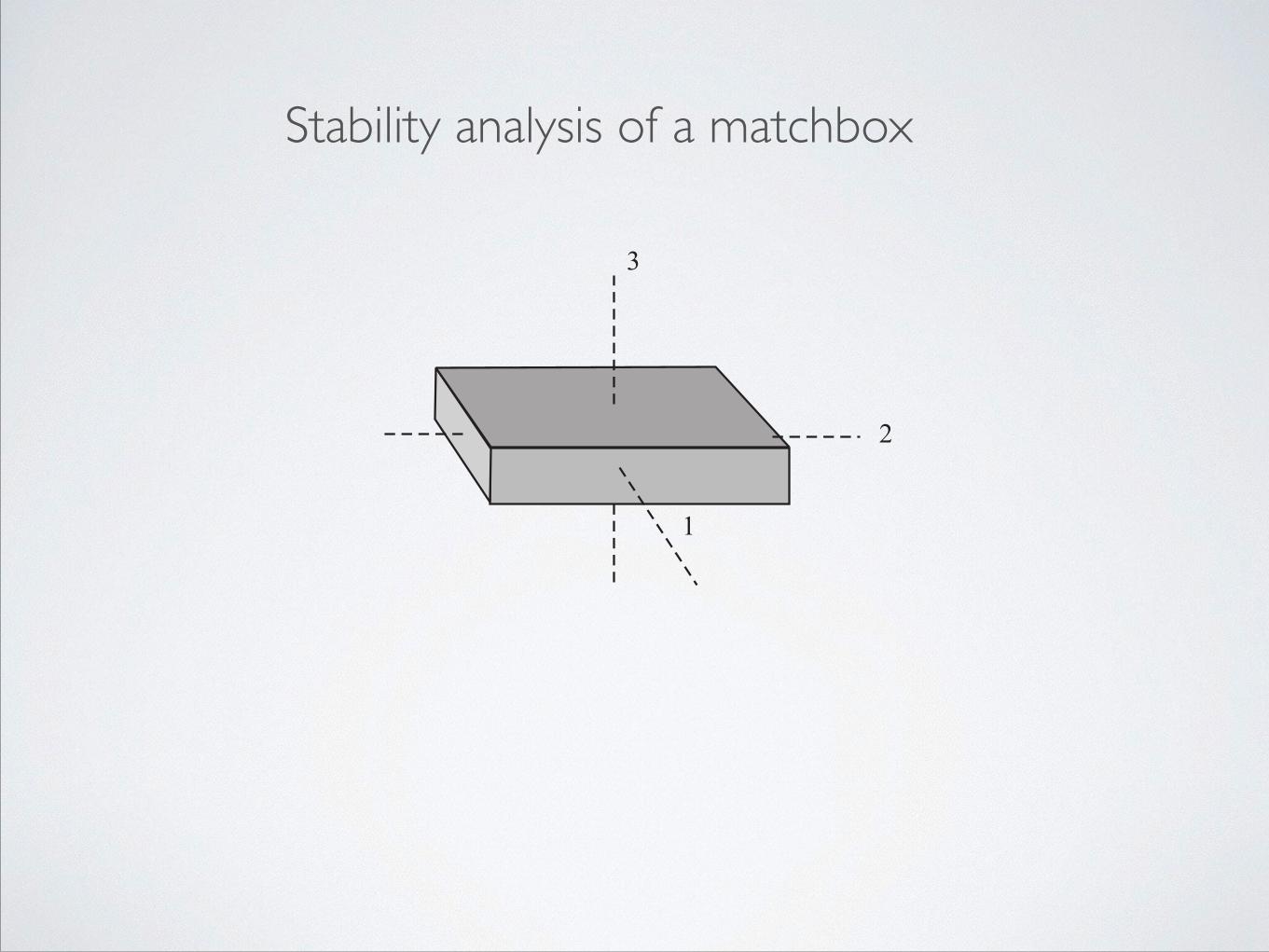
Stability analysis of a matchbox