Indical Notation exercise
1
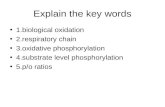
July 29, 2015 ME 601 - Stress Analysis Homework 2 - Due Date - August 5, 2015 (1) Expand the following expressions according to the summation convention: (a) u i v i w j e j ; (b) T ij v i e j ; (c) T ii v j e j . (2) Verify: (a) ε ijk ε ijk = δ ik δ jl - δ il δ jk ; (b) ε ilm ε jlm =2δ ij ; (c) ε ijk ε ijk = 6. (3) The basis e 0 i is obtained by a 30 o counterclockwise rotation of the e i basis about e 3 . (a) Find the orthogonal transformation Q that defines this change of basis, i.e., e 0 i = Q mi e m ; (b) By using the vector transformation law, find the components of a = √ 3e 1 +e 2 in the primed basis. (4) Given that S ij = a i a j and S 0 ij = a 0 i a 0 j , where a 0 i = Q mi a m and a 0 j = Q nj a n , and Q ik Q jk = δ ij , show that S 0 ii = S ii . (5) (a) If ε ijk T ij = 0, show that T ij = T ji , and (b) show that δ ij ε ijk = 0. (6) Let det(A ij ) denote the determinant of the matrix [A ij ]. Show that det(A ij )= ε ijk A i1 A j 2 A k3 . (7) By summing on the repeated subscripts determine the simplest form of (a) ε 3jk a j a k (b) ε ijk δ kj (c) ε 1jk a 2 T kj (d) ε 1jk δ 3j v k . (8) A rotation tensor R is defined by the relation Re 1 = e 2 ; Re 2 = e 3 ; Re 3 = e 1 . (a) Find the matrix of Rand verify that R T R = I and det(R) = 1 and (b) find a unit vector in the direction of the axis of rotation that could have been used to effect this particular rotation. (9) For any vector a and any tensor T, show that (a) aT A a = 0 and (b) aTa = aT S a, where T A and T S are antisymmetric and symmetric part of T, respectively. (10) Let F be an arbitrary tensor. (a) Show that F T F and FF T are both symmetric tensors. (b) If F = QU = VQ, where Q is orthogonal, show that U 2 = F T F and V 2 = FF T . (c) If λ and n are eigenvalue and the corresponding eigenvector for U , find the eigenvalue and eigenvector for V . (11) Consider the ellipsoidal surface defined by the equation x 2 a 2 + y 2 b 2 + z 2 b 2 = 1. Find the unit vector normal to the surface at a given point (x, y, z ). (12) If λ and φ are scalar functions of the coordinates x i , verify the following vector identities. Transcribe the left-hand side of the equations into indicial notation and, following the indi- cated operations, show that the result is the right-hand side. (a) v×(∇×v)= 1 2 ∇(v.v)-(v.∇)v (b) v.u × w = v × u.w (c) ∇× (∇× v)= ∇(∇.v) -∇ 2 v (d) ∇.(λ∇φ)= λ∇ 2 φ + ∇λ.∇φ (e) ∇ 2 (λφ)= λ∇ 2 φ + 2(∇λ).(∇φ)+ φ∇ 2 λ (f) ∇.(u × v)=(∇× u).v - u.(∇× v) (13) Consider the vector field v = x 1 2 e 1 + x 2 2 e 2 + x 3 2 e 3 . For the point (1,1,0), find (a) ∇v, (b) (∇v)v, (c) divv and curlv, and (d) the differential dv for dr = ds e 1 +e 2 +e 3 √ 3 . 1
description
Contains practice problems on indical notations
Transcript of Indical Notation exercise
-
July 29, 2015
ME 601 - Stress AnalysisHomework 2 - Due Date - August 5, 2015
(1) Expand the following expressions according to the summation convention: (a) uiviwjej; (b)Tijviej; (c) Tiivjej.
(2) Verify: (a) ijkijk = ikjl iljk; (b) ilmjlm = 2ij; (c) ijkijk = 6.
(3) The basis ei is obtained by a 30
o counterclockwise rotation of the ei basis about e3. (a) Findthe orthogonal transformation Q that defines this change of basis, i.e., e
i = Qmiem; (b) By
using the vector transformation law, find the components of a =
3e1+e2 in the primed basis.
(4) Given that Sij = aiaj and Sij = a
ia
j, where a
i = Qmiam and a
j = Qnjan, and QikQjk = ij,
show that Sii = Sii.
(5) (a) If ijkTij = 0, show that Tij = Tji, and (b) show that ijijk = 0.
(6) Let det(Aij) denote the determinant of the matrix [Aij]. Show that det(Aij) = ijkAi1Aj2Ak3.
(7) By summing on the repeated subscripts determine the simplest form of (a) 3jkajak (b) ijkkj(c) 1jka2Tkj (d) 1jk3jvk.
(8) A rotation tensor R is defined by the relation Re1 = e2; Re2 = e3; Re3 = e1. (a) Findthe matrix of Rand verify that RTR = I and det(R) = 1 and (b) find a unit vector in thedirection of the axis of rotation that could have been used to effect this particular rotation.
(9) For any vector a and any tensor T, show that (a) aTAa = 0 and (b) aTa = aTSa, where TA
and TS are antisymmetric and symmetric part of T, respectively.
(10) Let F be an arbitrary tensor. (a) Show that F TFand FF T are both symmetric tensors. (b)If F = QU = V Q, where Q is orthogonal, show that U2 = F TF and V 2 = FF T . (c) If andn are eigenvalue and the corresponding eigenvector for U , find the eigenvalue and eigenvectorfor V .
(11) Consider the ellipsoidal surface defined by the equation x2
a2+ y
2
b2+ z
2
b2= 1. Find the unit vector
normal to the surface at a given point (x, y, z).
(12) If and are scalar functions of the coordinates xi, verify the following vector identities.Transcribe the left-hand side of the equations into indicial notation and, following the indi-cated operations, show that the result is the right-hand side. (a) v(v) = 1
2(v.v)(v.)v
(b) v.u w = v u.w (c) ( v) = (.v)2v (d) .() = 2+. (e)2() = 2+ 2().() + 2 (f) .(u v) = ( u).v u.( v)
(13) Consider the vector field v = x12e1 + x2
2e2 + x32e3. For the point (1,1,0), find (a) v, (b)
(v)v, (c) divv and curlv, and (d) the differential dv for dr = dse1+e2+e33
.
1